Pag-uuri ng system awtomatikong regulasyon
Mga awtomatikong control system na ginagamit sa makabagong teknolohiya, ay medyo iba-iba. Mabilis na pagpapalawak functional na layunin functional na layunin ng mga awtomatikong system, na naging posible, lalo na, dahil sa pagpapakilala ng teknolohiya ng computer, ay nagdaragdag ng bilang ng mga natanto na klase ng mga system. Sa ilalim ng mga kundisyong ito, halos imposibleng magbigay ng kumpletong detalyadong pag-uuri ng mga awtomatikong sistema ng kontrol. Ang mga klasipikasyon na matagumpay na nailapat sa kamakailang nakaraan ay nagiging masyadong makitid, hindi sumasaklaw sa mga bagong sistemang binuo at ipinapatupad.
Ang anumang pag-uuri ay batay sa ilang partikular na tampok ng pag-uuri. Mula sa punto ng view ng pangkalahatan ng pag-uuri ng mga awtomatikong sistema ng kontrol, ang pinaka-maginhawang tampok ng pag-uuri ay ang impormasyong ginamit tungkol sa object ng regulasyon. Dapat tandaan na halos lahat ng mga awtomatikong sistema ay mga non-linear na aparato na naglalaman ng parehong mga variable at ipinamamahagi na mga parameter, kung saan ang halaga ng mga variable sa isang naibigay na oras ay maaaring nakasalalay hindi lamang sa kasalukuyang, kundi pati na rin sa mga nakaraang halaga ng mga variable na ito.
Ang bawat awtomatikong sistema ay nailalarawan sa pamamagitan ng isang gumaganang algorithm - isang hanay ng mga reseta na tumutukoy sa likas na katangian ng pagbabago sa kinokontrol na variable depende sa epekto
Depende sa likas na katangian ng pagbabago sa mga bahagi ng impluwensya sa pagmamaneho, ang mga awtomatikong sistema ay nahahati sa apat na klase:
- awtomatikong stabilization system, kung saan ang master action ay pare-pareho ang halaga, at ang kinokontrol na halaga ay awtomatikong pinananatili nang hindi nagbabago na may arbitrary na pagbabago sa pagkarga at mga panlabas na kondisyon. Ang pag-load ng regulated object (load torque sa motor shaft, generator load) sa mga stabilizing system ay karaniwang ang pangunahing perturbing effect na pinaka-mapansing nakakaapekto sa kinokontrol na halaga;
- mga sistema ng naka-program na regulasyon, kung saan nagbabago ang puwersang nagtutulak at ang kinokontrol na halaga ayon sa isang paunang natukoy na batas. Ang isang software na awtomatikong sistema ay maaaring ituring bilang isang sistema ng pagpapapanatag, kung saan ang gawain ng pagpapapanatag ay kumplikado sa pamamagitan ng gawain ng pagbabago ng kinokontrol na variable ayon sa isang naibigay na programa. Ang pagpapalit ng kinokontrol na halaga ayon sa programa ay nakakamit sa pamamagitan ng pagdaragdag sa system ng ilang elemento ng isang software device na nagbabago sa pagkilos ng setting sa oras ayon sa isang paunang natukoy na batas;
- Ang mga sistema ng servo ay kinabibilangan ng pagbabago ng kinokontrol na variable alinsunod sa pagbabago sa puwersang nagtutulak, ang batas ng pagbabago na kung saan ay isang hindi kilalang function. Kaya, ang servo system, tulad ng software system, ay nagpaparami ng master action. Gayunpaman, ang epektong ito sa sistema ng pagsubaybay ay hindi nagbabago ayon sa isang paunang natukoy na programa, ngunit arbitraryo. Halimbawa, ang radar antenna ay lumiliko upang sundan ang sasakyang panghimpapawid, ang tilapon na hindi alam nang maaga, ibig sabihin, "sinusundan" ito. Dito nagmula ang sistema ng pagsubaybay sa pangalan. Ang mga master na impluwensya at kinokontrol na mga halaga ng mga servo system ay maaaring magkaroon ng magkakaibang katangian sa kanilang pisikal na kalikasan. Bukod dito, ang kinokontrol na halaga ayon sa pisikal na katangian nito ay maaaring mag-iba sa pagkilos ng setting.
-
ang pinakamainam na mga sistema ng kontrol ay nagbibigay ng pinakamainam na pagpapanatili ng regulated na halaga ayon sa isa o iba pang pamantayan ng pinakamainam
Depende sa kung anong modelo ng matematika ang naglalarawan sa mga proseso sa mga awtomatikong system, nahahati sila sa:
- mga linear na awtomatikong sistema, ang mathematical na modelo kung saan ay binubuo ng mga linear o linearized na differential equation. Kung sa equation ng dynamics ng anumang link ng isang linear na awtomatikong sistema ay mayroong hindi bababa sa isa o ilang time-variable coefficients, kung gayon ang isang linear na awtomatikong sistema na may mga variable na parameter ay nakuha. Kung ang anumang link ay inilalarawan ng mga linear na partial differential equation, ang awtomatikong sistema ay magiging isang linear na awtomatikong sistema na may mga distributed na parameter. Sa kaibahan, ang isang ordinaryong linear na awtomatikong sistema ay isang lumped-parameter na awtomatikong sistema. Kung ang dynamics ng anumang link sa awtomatikong sistema ay inilarawan linear equation na may naantala na argumento, kung gayon ang awtomatikong sistema ay tinatawag na linear na awtomatikong sistema na may pagkaantala;
- non-linear na mga awtomatikong sistema, ang modelo ng matematika na kung saan ay binubuo ng non-linear differential equation. Kasama sa mga nonlinear na awtomatikong system ang lahat ng mga awtomatikong system, sa mga link kung saan mayroong mga static na katangian ng alinman sa maraming uri ng nonlinearity. Ang non-linear ay maaaring mga awtomatikong system na may variable na mga parameter, na may mga ipinamamahagi na mga parameter, na may pagkaantala, salpok at mga digital na awtomatikong sistema, kung ang linearity ng dynamics equation ay nilabag sa isang lugar sa kanila.
Pag-uuri ng mga awtomatikong sistema ng kontrol
Ang bawat awtomatikong sistema ay binubuo ng isang bilang ng mga link, na magkakaugnay sa naaangkop na paraan. Ang bawat indibidwal na link ay may input at output na tumutukoy sa epekto at paglipat ng impormasyon mula sa isang link patungo sa isa pa. AT pangkalahatang kaso anumang link ay maaaring magkaroon ng ilang input at output. Ang mga dami ng input at output ay maaaring maging anumang pisikal na katangian.
Sa panahon ng pagpapatakbo ng awtomatikong sistema, nagbabago ang mga halaga ng input at output sa paglipas ng panahon. Ang dynamics ng proseso ng conversion ng signal sa link na ito ay inilalarawan ng ilang equation na nag-uugnay sa output variable sa input variable. Ang hanay ng mga equation at katangian ng lahat ng mga link ay naglalarawan sa dinamika ng mga proseso ng kontrol o regulasyon sa buong sistema sa kabuuan.
Ang mga pangunahing tampok ng paghahati ng mga awtomatikong system sa malalaking klase ayon sa likas na katangian ng mga panloob na dynamic na proseso ay ang mga sumusunod:
- pagpapatuloy o discreteness ng mga dynamic na proseso sa oras;
- linearity o non-linearity ng mga equation na naglalarawan sa dinamika ng mga proseso ng kontrol.
Depende sa likas na katangian ng pagbabago sa mga signal ng kontrol, ang mga awtomatikong sistema ay nahahati sa tatlong klase:
- tuloy-tuloy na (analogue) na mga sistema, na inilarawan ng mga ordinaryong equation ng kaugalian at sa proseso ng regulasyon ang istraktura ng lahat ng mga koneksyon sa system ay nananatiling hindi nagbabago. Ang mga signal sa output ng mga indibidwal na link ng naturang sistema ay tuluy-tuloy na pag-andar ng mga impluwensya at oras. Mayroong tuluy-tuloy na functional na koneksyon sa pagitan ng mga link sa input at output ng awtomatikong system. Sa kasong ito, ang batas ng pagbabago sa halaga ng output sa oras ay maaaring maging arbitrary, depende sa anyo ng pagbabago sa halaga ng input at sa anyo ng link dynamics equation. Upang ang awtomatikong sistema sa kabuuan ay maging tuluy-tuloy, ito ay kinakailangan, una sa lahat, na ang mga static na katangian ng lahat ng mga link ay tuluy-tuloy;
- mga discrete (digital) system, na inilalarawan ng mga equation ng differential-difference at sa mga ito, sa mga discrete time interval, ang control action circuit ay binuksan o isinara. Sa mga discrete system, ang pagbubukas ng action circuit ay isinasagawa nang sapilitan at pana-panahon sa pamamagitan ng mga espesyal na nakakaabala na aparato. Ang ganitong mga sistema ay naglalaman ng mga elemento ng salpok at nagsasagawa ng pag-quantization ng signal sa mga tuntunin ng antas at oras. Ang isang link na nagko-convert ng tuluy-tuloy na input signal sa isang sequence ng pulses ay tinatawag na pulse link. Kung ang kasunod na link ng awtomatikong sistema ay discrete din, kung gayon para dito hindi lamang ang output, kundi pati na rin ang halaga ng input ay magiging discrete. Kasama sa mga discrete na awtomatikong system ang mga awtomatikong sistema ng kontrol ng impulse, pati na rin ang mga awtomatikong sistema para sa mga control computer. Ang mga huli ay nagbibigay ng resulta ng pagkalkula sa output nang discretely, sa ilang mga pagitan, sa anyo ng mga numero para sa mga indibidwal na discrete numerical values ng output quantity;
- relay (discrete-continuous) system, na inilalarawan ng parehong uri ng mga equation. Sa mga sistemang ito, ang pagbubukas o pagsasara ng action circuit ay isinasagawa ng isa sa mga link ng system na may tuluy-tuloy na halaga ng input action. Ang pagbubukas o pagsasara ay isinasagawa gamit ang isang relay o isang link na may katangian ng relay. Ang relay ay na-trigger sa ilang mga halaga ng mga impluwensya sa sensitibong organ nito. Ang mga relay system ay nagsasagawa ng quantization ng mga signal sa oras. Ang static na katangian ng relay link ay may mga break point.
Ang bawat isa sa tatlong klase ng mga awtomatikong system ay nahahati sa mga subclass:
- nakatigil na mga awtomatikong sistema na may mga naka-lump o ibinahagi na mga parameter;
- hindi nakatigil na mga awtomatikong system na may mga bukol o distributed na parameter.
Sa pag-aaral, pagkalkula at synthesis ng mga awtomatikong sistema, dapat itong isipin na ang teorya at iba't ibang mga inilapat na pamamaraan para sa ordinaryong linear na awtomatikong mga sistema ay ganap na binuo. Samakatuwid, sa mga interes ng pagiging simple ng pagkalkula, palaging kanais-nais na bawasan ang problema sa ganoong anyo upang makagawa ng maximum na paggamit ng mga pamamaraan ng pag-aaral ng mga ordinaryong linear na awtomatikong sistema. Karaniwan, ang mga equation ng dynamics ng lahat ng mga link ng isang awtomatikong sistema ay sinusubukan na bawasan sa ordinaryong mga linear, at para lamang sa ilang mga link, kung saan ito ay hindi katanggap-tanggap o kung saan ang isang espesyal na linear o non-linear na link ay espesyal na ipinakilala, ang mga espesyal na katangian. ay isinasaalang-alang.
Gayunpaman, hindi ito nangangahulugan na kapag nagdidisenyo ng mga bagong awtomatikong sistema, dapat magsikap ang isa para sa ordinaryong linear na awtomatikong sistema. Sa kabaligtaran, medyo halata na ang mga ordinaryong linear na awtomatikong sistema ay may limitadong mga kakayahan. Ang pagpapakilala ng mga espesyal na linear at non-linear na mga link ay maaaring magbigay ng awtomatikong sistema pinakamahusay na mga katangian. Ang mga awtomatikong system na may espesyal na ipinakilala na mga nonlinearity at discrete na mga awtomatikong system, kabilang ang mga may control computer at microprocessor-based na mga awtomatikong system, ay may napakaraming posibilidad.
Ayon sa uri at bilang ng mga signal, ang mga awtomatikong control system ay nahahati sa:
- single-circuit system kung saan mayroong isang adjustable na halaga;
- multi-circuit system kung saan mayroong ilang pangunahing o lokal na feedback;
- Ang mga sistema ng hindi magkakaugnay na regulasyon ay inilaan para sa regulasyon ng iba't ibang dami, ay hindi konektado sa isa't isa at maaari lamang makipag-ugnayan sa pamamagitan ng isang karaniwang bagay ng regulasyon.
a) sa mga umaasang sistema ng incoherent na kontrol, ang pagbabago sa isa sa mga kinokontrol na variable ay nakakaapekto sa pagbabago sa iba. Samakatuwid, sa gayong mga sistema, ang mga proseso ng regulasyon ay hindi maaaring isaalang-alang nang hiwalay sa isa't isa;
b) sa mga independiyenteng sistema ng hindi magkakaugnay na kontrol, ang pagbabago sa isa sa mga kinokontrol na halaga ay hindi nakasalalay sa pagbabago sa iba;
- Ang mga sistema ng konektadong regulasyon ay ipinapalagay ang pagkakaroon ng ilang mga regulator, ang mga regulated na halaga kung saan ay may mutual na koneksyon sa bawat isa, na isinasagawa bilang karagdagan sa object ng regulasyon.
Depende sa pagkakaroon o kawalan ng error sa regulasyon, nahahati ang ATS sa:
- Ang mga static na sistema ay mga ganoong sistema na ipinapalagay ang pagkakaroon ng patuloy na error sa pagkontrol (droop). katangian na tampok trabaho static na sistema ay ang ekwilibriyo ng sistema ay maaaring maabot kapag iba't ibang halaga regulated quantity at bawat halaga ng regulated quantity ay tumutugma sa isang solong halaga ng regulatory body;
- Ang mga astatic system ay mga system na, para sa iba't ibang mga halaga ng panlabas na impluwensya sa bagay, walang paglihis ng kinokontrol na halaga mula sa kinakailangang halaga. Sa ganitong mga sistema, ang estado ng ekwilibriyo ay nagaganap sa isang solong halaga ng kinokontrol na variable na katumbas ng ibinigay, at ang katawan na nagre-regulate ay dapat na sakupin ang iba't ibang mga posisyon sa parehong halaga ng kinokontrol na variable.
Mga prinsipyo ng awtomatikong kontrol
Ang prinsipyo ng pagpapatakbo ng anumang awtomatikong sistema ng kontrol ay upang makita ang mga paglihis ng mga kinokontrol na halaga na nagpapakilala sa pagpapatakbo ng regulated object o ang daloy ng proseso mula sa kinakailangang mode at, sa parehong oras, kumilos sa regulated object o proseso. sa paraang maalis ang mga paglihis na ito.
Sa proseso ng pamamahala, palaging mayroon pisikal na dami na kailangang baguhin sa isang mahigpit na tinukoy na paraan.
Ang mga awtomatikong sistema ng kontrol ay dapat, batay sa pagsukat ng mga kinokontrol na halaga, na bumuo ng mga pagkilos na kontrol sa kinokontrol na bagay. Ang pagbabago ng pag-uugali ng regulated object ay maaaring isagawa ayon sa mga prinsipyo ng bukas o saradong mga cycle.
Sa isang bukas na awtomatikong sistema ang pagkilos ng kontrol ay nabuo batay sa halaga ng tinukoy na halaga. Sa ganitong mga sistema, walang koneksyon sa pagitan ng input at output. Bilang isang resulta, ang daloy ng proseso ng kontrol sa mga bukas na sistema ay hindi nakasalalay sa mga resulta, iyon ay, sa kung paano gumaganap ang system ng mga function nito. Sa isang bukas na awtomatikong sistema, direktang aksyon lamang ang nagaganap: mula sa operator hanggang sa regulated object, mula sa input hanggang sa output. Ang pinakasimpleng halimbawa- ang proseso ng paglipat sa electric lighting sa silid.
Upang makuha ng regulated value na y(t) ng regulated object ang kinakailangang halaga, inilalapat ang input action x(t) sa input nito. Gayunpaman, sa pagsasagawa, ang kinokontrol na halaga y(t) ng kinokontrol na bagay ay lumilihis mula sa kinakailangang halaga para sa ilang kadahilanan. Isa sa mga kadahilanang ito ay ang impluwensya ng iba't ibang uri ng panlabas na nakakagambalang impluwensya f(t) sa bagay ng regulasyon. Ang isa pang dahilan ay ang impluwensya ng pagbabago ng mga parameter ng regulated object o iba pang elemento ng system, i.e. ang impluwensya ng mga parametric disturbances (gain factor, time constants, atbp.). Ang ikatlong dahilan para sa paglihis ng kinokontrol na variable ay dahil sa pagbabago sa kinakailangang halaga ng kinokontrol na variable (pagbabago sa kinakailangang temperatura ng hardening furnace, di-makatwirang pagbabago sa angular coordinates ng target). Kung ang kinakailangang halaga ng regulated variable ay nagbabago, pagkatapos ay para sa kaukulang pagbabago sa aktwal na halaga nito, kinakailangang baguhin ang control action h(t) sa input ng regulated object. Kapag nagbago ang pagkilos ng kontrol sa input ng control object, na may inertia, isang lumilipas na proseso ang nangyayari, kung saan ang kinokontrol na halaga ay hindi tumutugma sa kinakailangang halaga.
Ang paglihis ng kinokontrol na halaga mula sa kinakailangang halaga ay maaaring mangyari hindi lamang sa lumilipas, kundi pati na rin sa steady dynamic na mode, kapag ang kinakailangang halaga ay nagbabago, halimbawa, sa isang pare-pareho ang bilis o patuloy na acceleration. Ang paglihis ng kinokontrol na halaga sa ilalim ng impluwensya ng mga nakalistang dahilan ay maaaring umabot sa hindi katanggap-tanggap na malalaking halaga, kung saan nilabag ang teknikal na proseso na ibinigay ng bagay. Samakatuwid, ang problema ay lumitaw sa pagbawas ng mga paglihis ng mga halaga ng output ng mga bagay mula sa mga kinakailangang halaga. Ang gawaing ito ay ang pangunahing gawain ng pamamahala (regulasyon).
Malinaw na ang pangangailangan para sa isang kontrol na aksyon ay lumitaw sa mga kasong iyon kapag ang proseso sa object ng regulasyon ay lumihis mula sa mga reseta na ibinigay ng gumaganang algorithm.
Ang control algorithm sa naturang mga awtomatikong system ay tinutukoy ng mga katangian ng mga indibidwal na link o ang likas na katangian ng mga input signal. Maraming mga awtomatikong sistema ang nagpapatakbo sa prinsipyo ng open-loop na kontrol, na may paunang natukoy na algorithm ng mga aksyon. Halimbawa, pagsisimula ng internal combustion engine, pag-on ng compressor sa isang lokomotibo, pagpapakain ng buhangin sa ilalim ng mga wheelset, ang proseso ng pag-charge ng baterya, atbp. Para sa normal na paggana ng naturang mga awtomatikong sistema, dapat sundin ang ilang mga hakbang.
Sa sistemang ito, ang pagkilos ng kontrol ay maaaring mabuo ng isang tao. Ang paghahambing ng aktwal at kinakailangang mga halaga ng kinokontrol na variable, ang isang tao ay maaaring makilala ang paglihis sa pagitan ng mga ito, at alinsunod sa magnitude at tanda ng paglihis na ito, ang magnitude ng pagkilos ng kontrol ay natutukoy.
Una, ang buong pagsusulatan sa pagitan ng hanay at aktwal na mga halaga ng kinokontrol na variable ay maaaring maganap lamang kung ang mga katangian ng mga indibidwal na link ng awtomatikong sistema ay matatag at ang impluwensya ng mga panlabas na kaguluhan ay hindi kasama.
Pangalawa, dapat silang maingat na nakatutok, ibig sabihin, ang bawat posisyon ng aparato sa pagmamaneho ay dapat na mahigpit na tumutugma sa halaga ng kinokontrol na variable. Gayunpaman, i-save ang mga setting kapag ang mga bahagi ay pagod o ang mga elemento edad, pati na rin kapag ang temperatura ay nagbabago kapaligiran nagpapakita ng isang mahirap na gawain. Samakatuwid, ang mga open-loop system ay hindi makapagbibigay ng mataas na katumpakan ng kontrol. Hindi nila sinusukat ang resulta na dulot ng kontrol na aksyon, at hindi gumagawa ng mga aksyon na nakakaimpluwensya sa resultang ito upang tumugma ito sa ninanais.
Sa saradong mga awtomatikong system, ang kinokontrol na halaga ay inihambing sa itinakdang halaga nito, at isang kontrol na aksyon ay nabuo batay sa signal ng error. Ang pag-unlad ng proseso ng awtomatikong kontrol ay nakasalalay sa mga resulta ng paghahambing na ito.
Upang ipatupad ang naturang control algorithm, ang isang koneksyon ay ipinakilala sa disenyo ng awtomatikong sistema, na tinatawag na feedback, dahil nagpapadala ito ng isang senyas mula sa output ng regulated object sa input ng awtomatikong system sa direksyon na kabaligtaran sa direksyon. ng paghahatid ng pagkilos ng kontrol sa kinokontrol na bagay.
Ang pinakamadaling paraan ay ang magtanim ng isang tao na operator na gaganap ng papel ng feedback, halimbawa, sa proseso ng manu-manong kontrol sasakyan maging ito ay isang kotse, isang traktor, isang lokomotiko, isang eroplano o isang sasakyang pangalangaang. Sa kasong ito, paghahambing ng mga pagbabasa mga aparatong pangkontrol, sinusukat ang aktwal na halaga ng kinokontrol na variable (bilis, kapangyarihan, thrust, flight altitude, atbp.), kasama ang ibinigay na halaga nito, ang human operator ay gumagawa ng karagdagang epekto sa kinokontrol na bagay upang makamit ang minimum na paglihis ng kinokontrol na variable mula sa itinakdang halaga.
|

Sa isang banda, ang mga aksyon ng isang operator ng tao ay elementarya simple, at sa kabilang banda, ang pagsubaybay sa maraming mga aparato ay medyo nakakapagod, at madaling maisagawa ng isang espesyal na awtomatikong aparato na naghahambing sa setpoint at aktwal na halaga ng kinokontrol. variable at, sa batayan nito, ay bumubuo ng isang kontrol na aksyon sa kinokontrol na bagay. Kaya, lumitaw ang mga unang awtomatikong regulator, na idinisenyo upang palitan ang monotonous at hindi mahusay na paggawa ng isang tao na may awtomatikong aparato. Ang ganitong aparato ay awtomatikong regulator.
Ang object ng regulasyon at ang awtomatikong regulator ay bumubuo ng isang saradong sistema.
Sa saradong mga awtomatikong sistema, ang mga aksyon ng isang operator ng tao ay nabawasan sa paunang setting ng isang partikular na mode at pangkalahatang pagsubaybay sa mga proseso sa awtomatikong sistema. Ang katumpakan ng regulasyon sa mga closed automatic system, ibig sabihin, ang katumpakan ng pagpapanatili ng kinakailangang functional na relasyon sa pagitan ng input at output, ay higit sa lahat ay nakasalalay sa katumpakan kung saan ang paghahambing ng kinakailangan at aktwal na halaga ng kinokontrol na variable ay ginawa.
Ang mga closed-loop na awtomatikong control system ay naiiba sa prinsipyo ng regulasyon:
- sa pamamagitan ng paglihis;
- dahil sa galit;
- pinagsama.
Mga awtomatikong sistema ng kontrol batay sa prinsipyo ng paglihis, ay ang mga pangunahing sa pagsasagawa ng automation ng iba't ibang mga pasilidad sa produksyon. Ang mga ito ay nailalarawan sa pamamagitan ng pagkakaroon ng feedback, na nagbibigay ng bahagi ng output signal sa input ng awtomatikong sistema at bumubuo ng closed control loop. Ang kakanyahan ng prinsipyong ito ng kontrol ay ang aktwal na halaga ng kinokontrol na variable ay patuloy na inihahambing sa halaga nito. h binigay na halaga. Kung mayroong pagkakaiba sa pagitan ng mga halagang ito sa itaas ng isang paunang natukoy na threshold, ang sistema ay bubuo ng isang aksyong pang-regulasyon na naglalayong alisin ang pagkakaiba na ito o bawasan ito sa isang tiyak na katanggap-tanggap na halaga.
|

Ang kinakailangang halaga ng kinokontrol na halaga ng awtomatikong sistemang y(t) ay tinutukoy ng puwersang nagtutulak na x(t) na nagmumula sa device sa pagmamaneho. Ang paglihis ng kinokontrol na halaga na y(t) mula sa itinakdang halaga ay maaaring sanhi ng parehong impluwensya ng iba't ibang uri ng nakakagambalang mga impluwensya, at ng pagbabago sa setting ng pagkilos x(t). Upang bawasan o alisin ang paglihis na ito, kinakailangan na bumuo ng isang naaangkop na pagkilos ng kontrol h(t) at ilapat ito sa input ng control object. Ang pagkilos na kontrol kapag ginagamit ang prinsipyo ng kontrol sa paglihis ay nabuo bilang resulta ng pag-convert ng deviation Dx(t) ng kinokontrol na variable mula sa itinakdang halaga.
Sa mga awtomatikong system na tumatakbo sa prinsipyo ng paglihis, ang kontrol na aksyon na h(t) ay nakuha bilang resulta ng pagbabago ng signal ng paglihis, at hindi ang mismong salik na naging sanhi ng paglihis, halimbawa, ang nakakagambalang pagkilos f(t) (ibig sabihin, bilang resulta ng pagbabago ng kinahinatnan, at hindi ang sanhi mismo), kaya hindi ito maaaring magkaroon ng reverse effect sa object nang walang pagkaantala kumpara sa perturbing effect. Dahil dito, ang prinsipyo ng kontrol sa paglihis ay hindi ginagawang posible na ganap na maalis ang paglihis, ibig sabihin, makamit ang ganap na invariance.
Sa mga awtomatikong sistema na tumatakbo sa prinsipyo ng paglihis, ang pagkilos ng kontrol ay nakuha bilang isang resulta ng pagbabago ng paglihis, na maaaring sanhi ng iba't ibang mga kadahilanan. Samakatuwid, sa mga sistemang ito, bumababa ang paglihis, anuman ang mga kadahilanan na sanhi nito. Dahil sa mga awtomatikong system na nagpapatakbo sa prinsipyo ng paglihis, ang mga paglihis na nangyayari kapag ang mga parameter ng mga elemento ng awtomatikong pagbabago ng system ay bumababa din, kung gayon ang mga saradong awtomatikong sistema ay hindi gaanong sensitibo sa mga pagbabago sa mga parameter ng mga elemento nito kumpara sa mga bukas na awtomatikong sistema. , kung saan ang mga paglihis na dulot ng mga pagbabago sa mga parameter ng kanilang mga elemento, ay hindi binabayaran.
Ang mga awtomatikong sistema na nagpapatakbo ayon sa prinsipyong ito ay may mataas na katumpakan ng pagpapanatili ng kinokontrol na halaga (dahil sa pagkakaroon ng patuloy na kontrol ng pagkakaiba sa pagitan ng hanay at aktwal na mga halaga), ngunit mababa ang bilis.
Ang mababang pagganap ng naturang mga sistema ay dahil sa ang katunayan na
1. Ang closed loop ng awtomatikong kontrol, na nilikha ng awtomatikong controller at feedback, ay kinabibilangan ng object ng regulasyon. Sa pagsasagawa, ang object ng regulasyon ay halos palaging ang pinaka-inertial link sa awtomatikong sistema;
2. Hindi sila tumutugon sa dahilan na nagiging sanhi ng hindi pagkakatugma sa pagitan ng setpoint at ng aktwal na halaga ng kinokontrol na variable, ngunit sa resulta - ang hindi pagkakatugma sa pagitan ng setpoint at ang aktwal na halaga ng kinokontrol na variable.
Upang makabuo ng isang awtomatikong sistema ng kontrol na tumatakbo sa prinsipyo ng paglihis, ang iba pang mga bagay ay pantay, isang minimum na halaga ng paunang impormasyon tungkol sa bagay ng regulasyon ay kinakailangan. Halos lahat ng impormasyon tungkol sa object ng regulasyon ay ipinapadala sa pamamagitan ng feedback. Ang pagkakaroon ng feedback ay nailalarawan sa pamamagitan ng katotohanan na ang paggamit ng ilang impluwensya sa awtomatikong sistema ay nangangailangan ng isang kontraaksyon na nagpapanumbalik ng estado ng buong awtomatikong sistema.
Sa pinakasimpleng kaso, inihahambing ng awtomatikong controller ang output signal ng awtomatikong system sa reference signal upang malaman kung gaano ka tama ang awtomatikong sistema ay gumaganap ng gawain nito. Ang pagkakaroon ng feedback sa isang awtomatikong sistema ay nagbabago sa mga static at dynamic na katangian nito. Salamat sa feedback, ang isang awtomatikong system ay maaaring maging mas tumpak at mas mabilis, o vice versa, mas mabagal. Maaari nitong gawing matatag o hindi matatag ang awtomatikong sistema.
Ang mga system na tumatakbo sa prinsipyo ng paglihis ay may mga sumusunod na pakinabang:
1) bawasan ang paglihis ng kinokontrol na variable mula sa kinakailangang halaga, anuman ang sanhi nito (mga panlabas na nakakagambalang impluwensya, mga pagbabago sa mga parameter ng mga elemento ng system, mga pagbabago sa pagkilos ng setting);
2) ay hindi gaanong sensitibo sa mga pagbabago sa mga parameter ng mga elemento ng system, kumpara sa mga bukas na sistema.
Ang mga system na tumatakbo sa prinsipyo ng paglihis ay may mga sumusunod na disadvantages:
1) sa mga simpleng single-loop system na may prinsipyo ng kontrol sa pamamagitan ng paglihis, hindi makakamit ang ganap na invariance;
2) sa mga sistema na may prinsipyo ng regulasyon sa pamamagitan ng paglihis, tulad ng sa mga saradong sistema, ang problema ng katatagan ay lumitaw.
Dahil sa mga makabuluhang pakinabang ng system na may prinsipyo ng regulasyon sa pamamagitan ng paglihis, malawakang ginagamit ang mga ito sa teknolohiya.
Mga awtomatikong sistema ng kontrol na tumatakbo sa prinsipyo ng kabayaran sa kaguluhan, ay idinisenyo upang bawasan ang impluwensya ng mga nakakagambalang impluwensya sa kinokontrol na bagay sa pamamagitan ng pagsukat sa mga impluwensyang ito at pagpunan para sa kanilang impluwensya dahil sa baligtad na artipisyal na epekto sa kinokontrol na bagay.
Kapag binuo ang prinsipyong ito, nagpatuloy ang mga inhinyero mula sa pag-aakalang upang mabawasan o maalis ang paglihis ng kinokontrol na halaga mula sa setpoint na dulot ng impluwensya ng isa o ibang kadahilanan, kinakailangan na ang pagkilos ng kontrol ay isang tiyak na pag-andar ng kadahilanang ito. at ang mga katangian ng regulated object.
Kapag kinokontrol ayon sa prinsipyo ng kabayaran sa kaguluhan, ang problema ay upang mabayaran ang impluwensya ng kaguluhan sa kinokontrol na halaga.
Ang gumaganang impormasyon sa mga sistemang ito ay nakakagambalang mga impluwensya, masamang impluwensya na napapailalim sa kabayaran. Samakatuwid, sa mga sistemang ito, posible na ganap na mabayaran ang impluwensya ng nakakabagabag na aksyon sa kinokontrol na variable, ibig sabihin, posibleng makamit ang invariance (independence) ng kinokontrol na dami na may paggalang sa nakagagambalang aksyon na ito. Ang isinasaalang-alang na pamamaraan ay maaaring magbayad para sa impluwensya ng bawat isa sa mga nakakagambalang impluwensya nang hiwalay. Gayunpaman, sa pagsasagawa, kadalasan ay hindi posible na mabayaran ang impluwensya ng lahat ng nakakagambalang mga impluwensya, dahil ang isang makabuluhang bahagi ng mga impluwensya ay hindi masusukat, at kapag sinusubukang bayaran ang lahat ng posibleng nakakagambalang mga impluwensya, isang napaka-komplikadong sistema ay nakuha.
Ang ganitong mga awtomatikong sistema ay nangangailangan ng paunang impormasyon kahit na mas kumpleto kaysa sa mga awtomatikong sistema na tumatakbo sa prinsipyo ng paglihis. Sa katunayan, upang mabayaran ang impluwensya ng anumang kaguluhan sa steady state, at higit pa sa lumilipas na mga kondisyon, kinakailangang malaman nang eksakto ang impluwensyang ito.
Sa kasong ito, pipiliin ang isa (pangunahing) o dalawa (wala nang) perturbation at tinutukoy kung paano nakakaapekto ang mga ito sa kinokontrol na variable. Ang pagkilos ng kontrol na inilapat sa object ng regulasyon ng executive body ay nakasalalay sa kaguluhan upang ang mga pagbabago sa kinokontrol na halaga ay hindi lalampas sa tinukoy na mga limitasyon. Ang ganitong mga sistema ay simple at matatag sa pagpapatakbo, ngunit hindi sila nakakatugon sa iba pang mga kaguluhan na nagdudulot ng paglihis ng kinokontrol na variable.
|

Ang prinsipyo ng perturbation compensation ay upang mabawasan o maalis ang deviation Dx(t) ng kinokontrol na value mula sa set value na dulot ng perturbing action f(t), ang epektong ito ay sinusukat at, bilang resulta ng pagbabago nito, nabuo ang control action na h(t), na, kapag inilapat sa input ng regulated object, nagiging sanhi ng compensating deviation ng controlled value na y(t) ng kabaligtaran na sign kumpara sa deviation na dulot ng nakakagambalang impluwensya f(t ). Ang disturbance f(t) ay sinusukat gamit ang disturbance compensator. Ang ilang mga awtomatikong system ay tahasang kasama ang mga actuator at kontrol.
Ang signal sa disturbance хв(t) sa adder ay idinagdag (binawas) kasama ang master action, na tumutukoy sa kinakailangang halaga ng kinokontrol na variable. Ang kabuuang epekto Dx(t) sa tulong ng isang awtomatikong controller (para sa prinsipyong ito ng kontrol, sa karamihan ng mga kaso, ang awtomatikong controller ay isang power amplifier) ay pinalaki sa halagang kinakailangan upang makuha ang kinakailangang operating mode ng regulated object . Ang control action na h(t) na nabuo sa ganitong paraan ay pumapasok sa input ng regulated object at nagbabayad para sa impluwensya ng nakakagambalang aksyon.
Ang isang awtomatikong sistema na tumatakbo sa prinsipyo ng kabayaran sa kaguluhan ay isang bukas na loop na awtomatikong sistema. Sa loob nito, ang proseso ng regulasyon ay hindi nakasalalay sa mga resulta ng pagpapatakbo ng awtomatikong sistema (ang kinokontrol na halaga ay hindi sinusukat at walang aksyon na gagawin kung hindi ito tumutugma sa kinakailangang halaga) at isang direktang epekto lamang ang sinusunod.
Ang isang awtomatikong system na tumatakbo ayon sa prinsipyong ito ay may mataas na bilis, ngunit mababa ang katumpakan sa pagpapanatili ng kinokontrol na halaga. Ang mataas na bilis ay sinisiguro ng katotohanan na ang awtomatikong controller ay tumutugon hindi sa epekto ng impluwensya ng nakakagambalang impluwensya (paglihis ng kinokontrol na variable), ngunit sa dahilan - ang pagbabago sa nakakagambalang aksyon, paghahanda ng control object nang maaga para sa isang posibleng paglihis ng kinokontrol na variable.
Ang mga awtomatikong system na tumatakbo sa prinsipyo ng kabayaran sa kaguluhan ay may mga sumusunod na pakinabang:
1) pinapayagan kang ganap na mabayaran ang mga pangunahing nakakagambalang impluwensya, ibig sabihin, sa mga sistemang ito posible na makamit ang invariance ng kinokontrol na variable na may paggalang sa mga nakakagambalang impluwensya;
2) sa kanila, tulad ng sa anumang bukas na sistema, walang problema sa katatagan.
Ang mga awtomatikong system na tumatakbo sa prinsipyo ng kabayaran sa kaguluhan ay may mga sumusunod na disadvantages:
1) inaalis nila ang impluwensya ng mga pangunahing nakakagambalang impluwensya lamang, kung saan nilikha ang mga channel ng kompensasyon;
2) mayroong isang paglihis ng kinokontrol na halaga mula sa kinakailangang halaga bilang isang resulta ng isang pagbabago sa pangalawang nakakagambalang mga impluwensya, kung saan walang mga channel ng kompensasyon;
3) sa mga sistemang ito, tulad ng sa mga bukas na sistema, lumilitaw ang mga paglihis ng kinokontrol na halaga na may pagbabago sa mga katangian ng bagay at mga elemento ng awtomatikong sistema;
4) ang paggamit ng prinsipyo sa pagkontrol ng kaguluhan ay limitado sa mga bagay na ang mga katangian ay kilala o maaaring matukoy.
Ang mga system na tumatakbo sa prinsipyo ng kabayaran sa kaguluhan ay may mga partikular na aplikasyon.
Mga awtomatikong sistema ng kontrol na tumatakbo sa pinagsamang prinsipyo, pagsamahin ang prinsipyo ng kompensasyon ng perturbation at ang prinsipyo ng pagpapalihis. Ang ganitong mga awtomatikong sistema ay pinagsama ang mga positibong aspeto ng naunang tinalakay na mga prinsipyo ng awtomatikong kontrol at inaalis ang kanilang mga pagkukulang.
|
Sa ganitong mga sistema, bilang karagdagan sa pangunahing closed deviation control loop, ang pinagsamang awtomatikong sistema ay naglalaman ng compensation loop para sa isa o higit pang mga kaguluhan. Ang dami ng gumaganang impormasyon sa pinagsamang awtomatikong sistema ay mas mataas kaysa sa mga nakaraang sistema. Dito, ang impormasyon tungkol sa nakakagambalang impluwensya ay idinagdag sa impormasyon sa pagpapatakbo tungkol sa paglihis ng kinokontrol na variable.
Sa pinagsamang mga awtomatikong sistema, ang prinsipyo ng regulasyon sa pamamagitan ng paglihis ay ipinatupad sa tulong ng pangunahing feedback, at ang prinsipyo ng kontrol sa pamamagitan ng kaguluhan sa tulong ng mga link sa kompensasyon. Kung ang pinaka makabuluhang error ay sanhi ng nakakagambalang aksyon f(t), pagkatapos ay isang koneksyon ang ipinakilala para sa kaguluhan na ito, ngunit kung ang naturang error ay nakuha dahil sa isang pagbabago sa pagmamaneho ng aksyon x(t), pagkatapos ay ang koneksyon para sa ang pagkilos ng pagtatakda ay tinutukoy ng awtomatikong kontrol algorithm.
Sa pinagsamang mga awtomatikong sistema, ang koneksyon sa kompensasyon para sa pangunahing kaguluhan (aksyon sa pagmamaneho) ay nag-aalis ng bahagi ng error na dulot ng kaguluhan na ito (pagbabago ng impluwensya sa pagmamaneho), at bilang resulta ng pagkilos ng feedback, ang mga error na dulot ng pangalawang nakakagambalang mga impluwensya, kung saan walang mga koneksyon sa kompensasyon, ay nabawasan. Kung sa tulong ng mga compensatory link ang mga error na dulot ng pangunahing nakakagambala (setting) na mga impluwensya ay hindi ganap na naalis, kung gayon ang mga natitirang error ay nabawasan din sa tulong ng feedback.
Upang bumuo ng isang kontrol na aksyon sa pinagsamang mga awtomatikong system, ang parehong direktang impormasyon tungkol sa mga pangunahing nakakagambalang impluwensya (mga pagbabago sa master action) at ang paglihis ng kinokontrol na variable mula sa kinakailangang halaga na dulot ng lahat ng nakakagambalang mga impluwensya (pagbabago sa master action) ay ginagamit . Sa gayon:
1) sa pinagsamang mga awtomatikong sistema, sa tulong ng mga compensatory link, posible na makamit ang kumpletong kabayaran para sa mga error na dulot ng pangunahing nakakagambala at master na impluwensya (posibleng makamit ang invariance);
2) kasama ang posibilidad ng kumpletong kabayaran ng mga error na dulot ng mga pangunahing impluwensya, sa pinagsamang mga awtomatikong sistema, sa tulong ng feedback, ang mga error na dulot ng pangalawang nakakagambalang mga impluwensya, kung saan walang mga compensatory na koneksyon, pati na rin ang mga undercompensated na error mula sa ang mga pangunahing impluwensya, ay nabawasan;
3) kung ang mga kondisyon para sa pagbabayad ng nakakagambalang aksyon ay nilabag, ang nagresultang error ay nabawasan ng isang saradong awtomatikong sistema, ibig sabihin, ang pinagsamang mga awtomatikong sistema ay hindi gaanong sensitibo sa mga pagbabago sa mga parameter ng mga bukas na channel kaysa sa mga bukas na awtomatikong sistema;
4) dahil sa pagkakaroon ng bukas na mga channel ng kompensasyon sa pinagsamang mga awtomatikong sistema, ang problema ng katatagan ay hindi kasing talamak ng sa mga saradong awtomatikong sistema.
Naturally, ang katumpakan ng regulasyon, na makakamit sa pinagsamang mga sistema, ay mas mataas kaysa sa katumpakan ng lahat ng iba pang mga awtomatikong sistema. Sa pagsasagawa, ang mga naturang awtomatikong sistema ay kumplikado at mahal.
Kaya, ang pinagsamang mga awtomatikong system ay ang pinaka-advanced na mga system na may mataas na katumpakan sa pagpapanatili ng kinokontrol na halaga. Sa isinasaalang-alang na mga prinsipyo, hindi lamang mga teknikal na sistema ng awtomatikong kontrol ang binuo, kundi pati na rin ang mga sistema ng kontrol sa lipunan at mga sistema ng regulasyon sa mga nabubuhay na organismo. Samakatuwid, ang mga pamamaraan ng pananaliksik mga teknikal na sistema ang awtomatikong regulasyon sa isang tiyak na lawak ay maaaring gamitin upang pag-aralan ang mga sistema ng kontrol sa lipunan at wildlife.
Panimula 5
Pagbuo ng isang functional diagram ng isang automatic control system (ACS) 6
Pagbuo ng mga differential equation at paglipat ng mga function ng mga elemento ng system. 7
Pag-unlad block diagram SAR 11
Pagbabago ng structural scheme ng ACS sa canonical form 12
Pagsusuri ng katatagan ng ACS ayon sa algebraic na pamantayan 13
Pagkalkula at pagtatayo ng mga lumilipas na proseso kasama ang mga channel ng pag-regulate at nakakagambalang mga impluwensya. labinlima
Pansamantalang pagtatasa ng kalidad 17
Application ng graphics 19
Mga Sanggunian 22
Panimula
Sa functional na disenyo ng mga awtomatikong sistema ng kontrol, ang mga pamamaraan ng teorya ng awtomatikong kontrol ay kadalasang ginagamit. Ang awtomatikong sistema ay binubuo ng ilang mga teknikal na device na may ilang mga functional at dynamic na katangian. Para sa kanilang paglalarawan at pag-aaral, ang isang awtomatikong sistema ay kinakatawan ng isang tiyak na hanay ng mga elemento na pinagkalooban ng kaukulang mga katangian.
Ang mga tunay na teknikal na bagay ay inilalarawan ng mga nonlinear na kaugalian at algebraic na equation. Ngunit dahil sa paunang yugto ng disenyo ay nalutas nila ang mga problema ng paunang pagsusuri ng mga teknikal na solusyon at pagtataya, medyo makatwiran na gumamit ng medyo simpleng mga modelo ng matematika para sa mga layuning ito. Kaugnay nito, ang mga nonlinear na equation ng matematikal na modelo ay napapailalim sa linearization.
Ang paglalarawan ng mga awtomatikong sistema ay lubos na pinasimple sa pamamagitan ng paggamit ng mga pamamaraan ng operational calculus. Gamit ang Laplace transform, ang linear differential equation ay binabawasan sa algebraic equation na may mga kumplikadong variable.
Pagbuo ng isang functional diagram ng isang awtomatikong control system (sar)
Ang ACS ay maaaring katawanin ng dalawang pangunahing bahagi - ang object ng regulasyon at ang regulatory device - ang regulator.
Ang estado ng bagay ay tinutukoy ng isang bilang ng mga halaga na nagpapakilala:
Epekto sa object ng mga regulatory device;
Impluwensiya sa bagay ng panlabas na kapaligiran;
Ang daloy ng mga proseso sa loob mismo ng bagay.
Sa pangkalahatan, ang object ng regulasyon ay maaaring katawanin ng sumusunod na scheme:
kanin. 1. Scheme ng object ng regulasyon
Kung saan ang Z ay ang kabuuan ng mga kontroladong panlabas na impluwensya;
F - walang kontrol na panlabas na impluwensya;
X - mga impluwensya sa regulasyon;
U - adjustable na mga halaga.
Sa aming kaso, ang bagay (DC generator) ay may isang adjustable effect (forced current i c) at isang adjustable value (clamp voltage U n) at tinatawag itong simple o single-connected.
Ang pag-uugali ng regulated object ay maaaring isaalang-alang sa mga mode ng statics at dynamics. Ang functional diagram ay isang diagram kung saan ang bawat functional na elemento ng system ay tumutugma sa isang tiyak na link. Ang schematic diagram ng binuong ATS ay ipinapakita sa graphical appendix.
Para sa ACS na ito, ang functional diagram ay ganito ang hitsura:
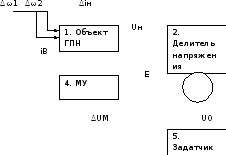
Figure 2. Functional diagram ng ATS
Kung saan 1 - ang object ng regulasyon - isang pare-pareho ang boltahe generator;
2 - divider ng boltahe;
3 - paghahambing na aparato, ay isang stimulating node;
4 - amplifier (sa aming kaso, isang magnetic amplifier na may self-magnetization);
5 - setter - aparato para sa pagtatakda ng pag-install.
Ang load current ng magnetic amplifier ay isang control variable, kaya walang actuator sa functional diagram.
Prinsipyo ng operasyon:
Ang kinokontrol na halaga ay ang boltahe U n sa mga terminal ng generator, na kung saan ay inihambing sa reference na boltahe U 0 sa pamamagitan ng divider K (U 1) mismatch E ay pinapakain sa control winding ng magnetic amplifier. Ang pag-load ng magnetic amplifier ay ang kasalukuyang sa paikot-ikot na paggulo ng auxiliary generator exciter.
Ang setting ay itinakda ng adjustable voltage divider ratio R 1 , na nagtatatag ng pagsusulatan sa pagitan ng regulated voltage U n at ng reference na boltahe U 0 .
Ang nakakagambala, hindi nakokontrol na mga impluwensya ay: pagbaba ng boltahe sa windings ng generator na dulot ng load current i n; interference na dulot ng load current i n; interference na dulot ng pagbabago sa bilis ng pag-ikot ng generator shafts ω 1 at ω 2 ; pagbabagu-bago ng boltahe ng supply ng magnetic amplifier ∆U n.
Alinsunod sa gawain sa aming functional diagram, ang mga halaga ng input at output ay ipinahiwatig para sa bawat functional block. Ang mga aksyon ng nakakagambalang mga impluwensya ay ipinapakita din.
Ayon sa prinsipyo ng regulasyon awtomatikong mga sistema ng kontrol ay nahahati sa apat na klase.
1. Automatic stabilization system - isang sistema kung saan ang controller ay nagpapanatili ng pare-parehong set value ng kinokontrol na parameter.
2. Program control system - isang sistema na nagbibigay ng pagbabago sa kinokontrol na parameter ayon sa isang paunang natukoy na batas (sa oras).
3. Tracking system - isang system na nagbibigay ng pagbabago sa kinokontrol na parameter depende sa ilang ibang value.
4. Extreme control system - isang sistema kung saan pinapanatili ng regulator ang halaga ng kinokontrol na variable na pinakamainam para sa pagbabago ng mga kondisyon.
Para sa regulasyon rehimen ng temperatura mga pag-install ng electric heating, pangunahin ang mga sistema ng unang dalawang klase ay ginagamit.
Ang mga awtomatikong sistema ng pagkontrol ng temperatura ay maaaring nahahati sa dalawang grupo ayon sa uri ng pagkilos: pasulput-sulpot at tuluy-tuloy na regulasyon.
Mga awtomatikong regulator para sa functional na mga tampok ay nahahati sa limang uri: positional (relay), proporsyonal (static), integral (astatic), isodromic (proportional-integral), isodromic na may advance at may unang derivative.
Ang mga positional regulator ay tinutukoy bilang pasulput-sulpot na ACS, at ang iba pang uri ng mga regulator ay tinutukoy bilang tuluy-tuloy na ACS. Nasa ibaba ang mga pangunahing tampok ng positional, proportional, integral at isodromic controllers, na kadalasang ginagamit sa mga awtomatikong sistema ng pagkontrol sa temperatura.
(Fig. 1) ay binubuo ng isang control object 1, isang temperature sensor 2, isang programming device o isang temperature level setter 4, isang controller 5 at isang actuator 8. Sa maraming mga kaso, ang isang pangunahing amplifier 3 ay inilalagay sa pagitan ng sensor at ng programming device, at sa pagitan ng controller at aparatong tagapagpaganap- pangalawang amplifier 6. Ang karagdagang sensor 7 ay ginagamit sa mga isodromic control system.
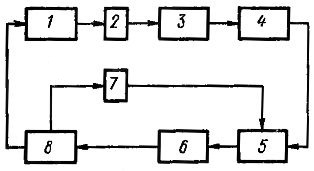
kanin. 1. Functional na diagram ng awtomatikong kontrol sa temperatura
Positional (relay) temperature controllers
Ang mga positional regulator ay ang mga kung saan ang regulatory body ay maaaring maghawak ng dalawa o tatlong partikular na posisyon. Sa mga pag-install ng electric heating, ginagamit ang mga regulator ng dalawa at tatlong posisyon. Ang mga ito ay simple at maaasahan sa pagpapatakbo.
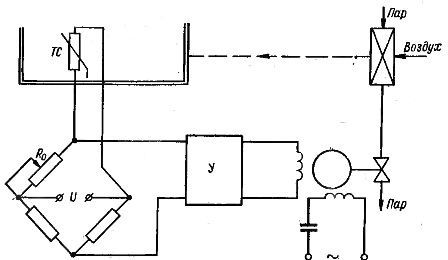
Sa fig. 2 ang ipinakita circuit diagram dalawang posisyon na regulasyon ng temperatura ng hangin.
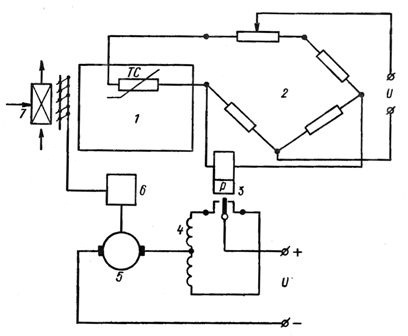
kanin. Fig. 2. Schematic diagram ng on-off air temperature control: 1 - control object, 2 - pagsukat ng tulay, 3 - polarized relay, 4 - motor excitation windings, 5 - motor armature, 6 - reducer, 7 - calorific.
Upang kontrolin ang temperatura sa kinokontrol na bagay, ginagamit ang thermal resistance TS, na kasama sa isa sa mga braso ng panukat na tulay 2. Ang mga halaga ng paglaban ng tulay ay pinili sa paraang sa isang naibigay na temperatura ang tulay ay balanse, iyon ay, ang boltahe sa dayagonal ng tulay ay zero. Kapag tumaas ang temperatura, ang polarized relay 3, kasama sa dayagonal ng panukat na tulay, ay i-on ang isa sa mga windings 4 ng electric motor direktang kasalukuyang, na, sa tulong ng reducer 6, ay nagsasara balbula ng hangin sa harap ng heater 7. Kapag bumaba ang temperatura, bubukas nang buo ang air valve.
Sa dalawang posisyon na kontrol sa temperatura, ang dami ng init na ibinibigay ay maaari lamang itakda sa dalawang antas - maximum at minimum. Ang maximum na halaga ng init ay dapat na higit sa kinakailangan upang mapanatili ang nais na kinokontrol na temperatura, at ang minimum ay dapat na mas mababa. Sa kasong ito, ang temperatura ng hangin ay nagbabago sa paligid ng itinakdang halaga, iyon ay, ang tinatawag na self-oscillatory mode(Larawan 3, a).
Ang mga linya na tumutugma sa mga temperatura τ n at τ ay tumutukoy sa ibaba at itaas na mga hangganan ng dead zone. Kapag ang temperatura ng kinokontrol na bagay, bumababa, ay umabot sa halagang τ n, ang dami ng init na ibinibigay ay agad na tumataas at ang temperatura ng bagay ay nagsisimulang tumaas. Nang maabot ang halaga τ in, binabawasan ng regulator ang supply ng init, at bumababa ang temperatura.
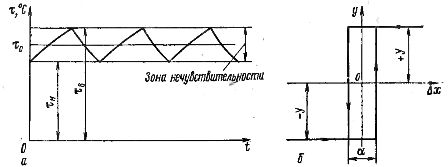
kanin. 3. Oras na tugon ng on-off na kontrol (a) at static na tugon ng on-off na controller (b).
Ang rate ng pagtaas at pagbaba ng temperatura ay nakasalalay sa mga katangian ng regulated object at sa katangian ng oras nito (acceleration curve). Ang mga pagbabago sa temperatura ay hindi lalampas sa deadband kung ang mga pagbabago sa supply ng init ay agad na nagdudulot ng mga pagbabago sa temperatura, iyon ay, kung walang pagkaantala ng kinokontrol na bagay.
Sa pagbaba sa dead zone, bumababa ang amplitude ng mga pagbabago sa temperatura pababa sa zero sa τ n = τ c. Gayunpaman, ito ay nangangailangan na ang supply ng init ay iba-iba sa isang walang katapusang mataas na dalas, na lubhang mahirap ipatupad sa pagsasanay. Sa lahat ng tunay na bagay ng regulasyon ay may pagkaantala. Ang proseso ng regulasyon sa kanila ay nagpapatuloy sa humigit-kumulang sa mga sumusunod.
Kapag ang temperatura ng kinokontrol na bagay ay bumaba sa halagang τ n, ang supply ng init ay agad na nagbabago, gayunpaman, dahil sa pagkaantala, ang temperatura ay patuloy na bumababa nang ilang panahon. Pagkatapos ay tumataas ito sa halagang τ kung saan agad na bumababa ang supply ng init. Ang temperatura ay patuloy na tumataas nang ilang panahon, pagkatapos, dahil sa nabawasan na supply ng init, bumababa ang temperatura, at ang proseso ay paulit-ulit na muli.
Sa fig. 3, b ay ipinapakita static na katangian ng on/off controller. Ito ay sumusunod mula dito na ang epekto ng regulasyon sa bagay ay maaaring tumagal lamang ng dalawang halaga: maximum at minimum. Sa isinasaalang-alang na halimbawa, ang maximum ay tumutugma sa posisyon kung saan ang balbula ng hangin (tingnan ang Fig. 2) ay ganap na bukas, ang minimum - kapag ang balbula ay sarado.
Ang tanda ng pagkilos ng kontrol ay tinutukoy ng tanda ng paglihis ng regulated na halaga (temperatura) mula sa itinakdang halaga nito. Ang magnitude ng pagkilos ng kontrol ay pare-pareho. Ang lahat ng dalawang-posisyon na controllers ay may hysteresis zone α, na nangyayari dahil sa pagkakaiba sa pagpapatakbo at pagpapakawala ng mga alon ng electromagnetic relay.
Halimbawa ng paggamit ng on/off temperature control:
Proporsyonal (static) na mga controller ng temperatura
Sa mga kaso kung saan kinakailangan ang mataas na katumpakan ng kontrol o kapag hindi katanggap-tanggap ang proseso ng self-oscillating, mag-apply mga controller na may tuluy-tuloy na proseso ng kontrol. Kabilang dito ang mga proporsyonal na regulator (P-regulator) angkop para sa pagkontrol sa isang malawak na iba't ibang mga teknolohikal na proseso.
Sa mga kaso kung saan ang mataas na katumpakan ng kontrol ay kinakailangan o kapag ang isang self-oscillating na proseso ay hindi katanggap-tanggap, ang mga regulator na may tuluy-tuloy na proseso ng kontrol ay ginagamit. Kabilang dito ang mga proporsyonal na regulator (P-regulator), na angkop para sa pag-regulate ng malawak na iba't ibang mga teknolohikal na proseso.
Sa mga awtomatikong control system na may mga P-regulator, ang posisyon ng regulatory body (y) ay direktang proporsyonal sa halaga ng kinokontrol na parameter (x):
y=k1х,
kung saan ang k1 ay ang proportionality factor (controller gain).
Nagaganap ang proporsyonalidad na ito hanggang sa maabot ng nagre-regulate na katawan ang matinding posisyon nito (limit switch).
Ang bilis ng paggalaw ng regulating body ay direktang proporsyonal sa rate ng pagbabago ng kinokontrol na parameter.
Sa fig. Ang 4 ay nagpapakita ng isang schematic diagram ng isang sistema para sa awtomatikong pagkontrol sa temperatura ng silid gamit ang isang proporsyonal na controller. Ang temperatura ng silid ay sinusukat sa pamamagitan ng isang thermometer ng paglaban na TC na kasama sa circuit 1 ng panukat na tulay.

kanin. 4. Air temperature proportional control scheme: 1 - panukat na tulay, 2 - control object, 3 - heat exchanger, 4 - capacitor motor, 5 - phase-sensitive amplifier.
Sa isang naibigay na temperatura, ang tulay ay balanse. Kapag ang kinokontrol na temperatura ay lumihis mula sa itinakdang halaga, lumilitaw ang isang hindi balanseng boltahe sa dayagonal ng tulay, ang magnitude at tanda nito ay nakasalalay sa magnitude at tanda ng paglihis ng temperatura. Ang boltahe na ito ay pinalakas ng isang phase-sensitive na amplifier 5, sa output kung saan ang winding ng isang two-phase motor ng kapasitor 4 na actuator.
Ang actuator ay gumagalaw sa control element, binabago ang daloy ng coolant sa heat exchanger 3. Kasabay ng paggalaw ng control element, ang paglaban ng isa sa mga braso ng pagsukat ng tulay ay nagbabago, bilang isang resulta kung saan nagbabago ang temperatura, sa na ang tulay ay balanse.
Kaya, dahil sa matibay na feedback, ang bawat posisyon ng regulatory body ay tumutugma sa sarili nitong equilibrium value ng kinokontrol na temperatura.
Ang isang proporsyonal (static) na controller ay nailalarawan sa pamamagitan ng natitirang hindi pantay na regulasyon.
Sa kaso ng isang biglaang paglihis ng load mula sa itinakdang halaga (sa sandaling t1), ang kinokontrol na parameter ay darating pagkatapos ng isang tiyak na tagal ng panahon (sa sandaling t2) sa isang bagong steady na halaga (Fig. 4). Gayunpaman, ito ay posible lamang sa isang bagong posisyon ng regulatory body, iyon ay, sa isang bagong halaga ng kinokontrol na parameter, na naiiba mula sa itinakdang halaga ng δ.

kanin. 5. Mga katangian ng oras ng proporsyonal na kontrol
Ang kawalan ng mga proporsyonal na controller ay ang bawat halaga ng parameter ay tumutugma lamang sa isang partikular na posisyon ng regulator. Upang mapanatili ang itinakdang halaga ng parameter (temperatura) kapag nagbabago ang pagkarga (pagkonsumo ng init), kinakailangan na ang katawan na nagre-regulate ay kumuha ng ibang posisyon na naaayon sa bagong halaga ng pagkarga. Hindi ito nangyayari sa isang proporsyonal na controller, na nagreresulta sa isang natitirang paglihis ng kinokontrol na variable.
Integral (astatic regulators)
Integral (astatic) ang mga naturang regulator ay tinatawag na kung saan, kapag ang parameter ay lumihis mula sa itinakdang halaga, ang nagre-regulate na katawan ay gumagalaw nang higit pa o hindi gaanong mabagal at sa lahat ng oras sa isang direksyon (sa loob ng gumaganang stroke) hanggang sa makuha muli ng parameter ang itinakdang halaga. Ang direksyon ng stroke ng katawan ng regulasyon ay nagbabago lamang kapag ang parameter ay dumaan sa itinakdang halaga.
Sa integral regulators ng electrical action, ang isang patay na zone ay karaniwang artipisyal na nilikha, sa loob kung saan ang isang pagbabago sa isang parameter ay hindi nagiging sanhi ng paggalaw ng regulatory body.
Ang bilis ng paggalaw ng nagre-regulate na katawan sa integral regulator ay maaaring pare-pareho at variable. Ang isang tampok ng integral controller ay ang kawalan ng isang proporsyonal na relasyon sa pagitan ng mga itinatag na halaga ng kinokontrol na parameter at ang posisyon ng regulatory body.
Sa fig. Ang 6 ay nagpapakita ng isang schematic diagram ng isang awtomatikong sistema ng pagkontrol ng temperatura gamit ang isang pinagsamang controller. Sa loob nito, hindi katulad ng proporsyonal na temperatura control circuit (tingnan ang Fig. 4), walang mahirap na feedback.
kanin. 6. Iskema integral na regulasyon temperatura ng hangin
Sa isang integral na controller, ang bilis ng regulating body ay direktang proporsyonal sa paglihis ng kinokontrol na parameter.
Ang proseso ng integral temperature control na may biglang pagbabago sa load (heat consumption) ay ipinapakita sa fig. 7 sa tulong ng mga katangian ng oras. Tulad ng makikita mula sa graph, ang kinokontrol na variable na may integral na kontrol ay dahan-dahang bumabalik sa itinakdang halaga.

kanin. 7. Mga katangian ng oras ng integral na regulasyon
Isodromic (proportional-integral) controllers
Isodromic na regulasyon ay may mga katangian ng parehong proporsyonal at integral na regulasyon. Ang bilis ng paggalaw ng regulating body ay depende sa magnitude at bilis ng paglihis ng kinokontrol na parameter.
Kung ang kinokontrol na parameter ay lumihis mula sa itinakdang halaga, ang regulasyon ay isinasagawa bilang mga sumusunod. Sa una, ang regulating body ay gumagalaw depende sa magnitude ng paglihis ng kinokontrol na parameter, iyon ay, nagaganap ang proporsyonal na regulasyon. Pagkatapos ang katawan ng regulasyon ay gumagawa ng karagdagang paggalaw, na kinakailangan upang maalis ang natitirang hindi pagkakapareho (integral na regulasyon).
Ang isang isodromic air temperature control system (Fig. 8) ay maaaring makuha sa pamamagitan ng pagpapalit ng matibay na feedback sa proportional control circuit (tingnan ang Fig. 5) na may nababanat na feedback (mula sa regulator hanggang sa feedback resistance slider). Ang elektrikal na feedback sa isodromic system ay isinasagawa ng isang potentiometer at ipinapasok sa control system sa pamamagitan ng isang circuit na naglalaman ng resistance R at capacitance C.
Sa mga lumilipas na proseso, ang feedback signal, kasama ang parameter deviation signal, ay nakakaapekto sa mga kasunod na elemento ng system (amplifier, electric motor). Kapag ang regulating body ay nakatigil, sa anumang posisyon nito, habang ang capacitor C ay sinisingil, ang feedback signal ay nabubulok (sa steady state ito ay katumbas ng zero).
kanin. 8. Scheme ng isodromic air temperature control
Karaniwan para sa isodromic na kontrol na ang hindi pagkakapareho ng kontrol (relative error) ay bumababa sa pagtaas ng oras, papalapit sa zero. Sa kasong ito, ang feedback ay hindi magdudulot ng mga natitirang deviation ng kinokontrol na variable.
Kaya, ang isodromic na kontrol ay humahantong sa mas mahusay na mga resulta kaysa sa proporsyonal o integral na kontrol (hindi banggitin ang posisyonal na kontrol). Ang proporsyonal na kontrol dahil sa pagkakaroon ng matibay na feedback ay nangyayari halos kaagad, isodromic - dahan-dahan.
Mga sistema ng software para sa awtomatikong kontrol ng temperatura
Upang ipatupad ang kontrol ng programa, kinakailangan na patuloy na maimpluwensyahan ang setting (set point) ng controller upang ang kinokontrol na halaga ay magbago ayon sa isang paunang natukoy na batas. Para sa layuning ito, ang controller tuning unit ay ibinibigay sa isang elemento ng software. Ang device na ito ay nagsisilbing magtatag ng batas ng pagbabago ng ibinigay na halaga.
Sa panahon ng electric heating, ang ACS actuator ay maaaring kumilos upang i-on o i-off ang mga seksyon ng electric heating elements, sa gayon ay binabago ang temperatura ng heated installation alinsunod sa isang ibinigay na programa. Ang software na kontrol sa temperatura at halumigmig ng hangin ay malawakang ginagamit sa mga artipisyal na pag-install ng klima.
Ang modernong teorya ng awtomatikong kontrol ay ang pangunahing bahagi ng teorya ng kontrol. Ang awtomatikong sistema ng kontrol ay binubuo ng isang adjustable na bagay at mga kontrol na kumikilos sa bagay kapag ang isa o higit pang adjustable variable ay nagbago. Sa ilalim ng impluwensya ng mga signal ng input (kontrol o kaguluhan), nagbabago ang mga kinokontrol na variable. Ang layunin ng regulasyon ay bumuo ng mga naturang batas, kung saan ang mga variable na kinokontrol ng output ay kakaunti ang pagkakaiba sa mga kinakailangang halaga. Ang solusyon sa problemang ito sa maraming kaso ay kumplikado sa pagkakaroon ng mga random na perturbations (ingay). Sa kasong ito, kinakailangang pumili ng naturang control law kung saan ang mga control signal ay dadaan sa system na may mababang distortion, at ang mga signal ng ingay ay halos hindi maipapadala.
Malayo na ang narating ng teorya ng awtomatikong kontrol sa pag-unlad nito. Sa paunang yugto, ang mga pamamaraan ay nilikha para sa pagsusuri ng katatagan, kalidad at katumpakan ng regulasyon ng tuluy-tuloy mga linear na sistema. Pagkatapos ang mga paraan ng pagsusuri ng discrete at discrete- tuloy-tuloy na mga sistema. Mapapansin na ang mga pamamaraan para sa pagkalkula ng tuluy-tuloy na mga sistema ay batay sa mga pamamaraan ng dalas, at ang mga pamamaraan para sa pagkalkula ng mga discrete at discrete-continuous na mga sistema ay batay sa mga z-transform na pamamaraan.
Sa kasalukuyan, ang mga pamamaraan para sa pagsusuri ng mga nonlinear na awtomatikong sistema ng kontrol ay binuo. Ang paglabag sa prinsipyo ng superposition sa mga non-linear system, ang pagkakaroon ng isang bilang ng mga alternating (depende sa epekto) na mga rehimen ng matatag, hindi matatag na mga galaw at self-oscillations ay nagpapalubha sa kanilang pagsusuri. Ang taga-disenyo ay nakatagpo ng mas malaking paghihirap kapag kinakalkula ang matinding at self-adjusting control system.
Parehong ang teorya ng awtomatikong kontrol at ang teorya ng kontrol ay kasama sa agham sa ilalim ng pangkalahatang pangalan na "technical cybernetics", na ngayon ay nakatanggap ng makabuluhang pag-unlad. Pinag-aaralan ng teknikal na cybernetics ang mga pangkalahatang pattern ng kumplikadong mga dynamic na control system para sa teknolohikal at mga proseso ng produksyon. Ang mga teknikal na cybernetics, awtomatikong kontrol at awtomatikong regulasyon ay umuunlad sa dalawang pangunahing direksyon: ang una ay nauugnay sa patuloy na pag-unlad at pagpapabuti sa disenyo ng mga elemento at ang teknolohiya ng kanilang paggawa; ang pangalawa - na may pinaka-makatuwirang paggamit ng mga elementong ito o ang kanilang mga grupo, na siyang gawain ng pagdidisenyo ng mga sistema.
Ang disenyo ng mga awtomatikong sistema ng kontrol ay maaaring isagawa sa dalawang paraan: sa pamamagitan ng paraan ng pagsusuri, kapag, na may isang paunang napiling istraktura ng system (sa pamamagitan ng pagkalkula o pagmomolde), ang mga parameter nito ay tinutukoy;
sa pamamagitan ng paraan ng synthesis, kapag, ayon sa mga kinakailangan, ang pinakamahusay na istraktura at mga parameter ay agad na napili para sa system. Ang parehong mga pamamaraan na ito ay malawak praktikal na gamit at samakatuwid ay ganap na sakop sa aklat na ito.
Ang pagtukoy sa mga parameter ng isang sistema, kapag ang istraktura at mga kinakailangan nito para sa buong sistema sa kabuuan ay kilala, ay tumutukoy sa problema ng synthesis. Ang solusyon sa problemang ito sa isang linear control object ay matatagpuan gamit, halimbawa, frequency method, root locus method, o sa pamamagitan ng pag-aaral ng mga trajectory ng mga ugat ng katangian na equation ng isang closed system. Pagpili ng isang corrective device sa pamamagitan ng synthesis sa silid-aralan fractional rational function ang kumplikadong variable ay maaaring gawin gamit ang graph Analytical pamamaraan. Ginagawang posible ng parehong mga pamamaraan na mag-synthesize ng mga corrective device na pinipigilan ang self-oscillating at hindi matatag na periodic mode sa mga nonlinear system.
Ang mga pamamaraan ng synthesis ay higit na binuo batay sa mga prinsipyo ng maximum at dynamic na programming, kapag ang pinakamainam na batas ng kontrol mula sa punto ng view ng isang naibigay na pamantayan ng kalidad ay natutukoy, na nagbibigay ng pinakamataas na limitasyon ng kalidad ng system, na dapat na pinagsikapan kapag nagdidisenyo nito. Gayunpaman, ang solusyon sa problemang ito ay halos hindi laging posible dahil sa pagiging kumplikado ng paglalarawan ng matematika ng mga pisikal na proseso sa system, ang imposibilidad ng paglutas ng problema sa pag-optimize mismo at ang mga kahirapan sa teknikal na pagpapatupad ng natagpuang nonlinear na batas ng kontrol. Dapat tandaan na ang pagpapatupad ng mga kumplikadong batas sa kontrol ay posible lamang kapag ang isang digital na computer ay kasama sa loop ng system. Ang paglikha ng mga extreme at self-adjusting system ay nauugnay din sa paggamit ng analog o digital na mga computer.
Ang pagbuo ng mga awtomatikong sistema ng kontrol, bilang panuntunan, ay isinasagawa batay sa mga analytical na pamamaraan ng pagsusuri o synthesis. Sa yugtong ito ng pagdidisenyo ng mga control system, batay sa mga tinatanggap na pagpapalagay, ang isang matematikal na modelo ng system ay pinagsama-sama at ang paunang istraktura nito ay napili. Depende sa uri ng modelo (linear o non-linear), ang isang paraan ng pagkalkula ay pinili upang matukoy ang mga parameter na nagbibigay ng mga tinukoy na tagapagpahiwatig ng katatagan, katumpakan at kalidad. Pagkatapos nito, ang modelo ng matematika ay pino at, gamit ang mga paraan pagmomolde ng matematika matukoy ang mga dinamikong proseso sa system. Sa ilalim ng pagkilos ng iba't ibang mga signal ng input, ang mga katangian ng dalas ay kinuha at inihambing sa mga kinakalkula. Pagkatapos ang mga margin ng katatagan ng system sa phase at modulus ay sa wakas ay naitatag at ang mga pangunahing tagapagpahiwatig ng kalidad ay natagpuan.
Dagdag pa, ang pagtatakda ng mga tipikal na pagkilos ng kontrol sa modelo; alisin ang mga katangian ng katumpakan. Sa batayan ng pagmomodelo ng matematika, ang mga teknikal na kinakailangan para sa kagamitan ng system ay iginuhit. Ang isang controller ay binuo mula sa manufactured equipment at inilipat sa semi-natural na pagmomodelo, kung saan ang control object ay kinokolekta sa anyo ng isang mathematical model.
Batay sa mga katangiang nakuha bilang resulta ng pagmomolde ng HIL, ang isang desisyon ay ginawa sa pagiging angkop ng controller upang gumana sa isang tunay na bagay ng regulasyon. Ang pangwakas na pagpili ng mga parameter ng controller at ang pagsasaayos nito ay isinasagawa sa mga natural na kondisyon sa panahon ng eksperimentong pag-unlad ng control system.
Ang pagbuo ng teorya ng awtomatikong kontrol batay sa mga equation ng estado at z-transforms, ang pinakamataas na prinsipyo at ang dynamic na pamamaraan ng programming ay nagpapabuti sa paraan ng pagdidisenyo ng mga control system at nagbibigay-daan sa iyo upang lumikha ng lubos na mahusay na mga awtomatikong system para sa pinaka. iba't ibang industriya Pambansang ekonomiya.
Ang mga awtomatikong sistema ng kontrol na nakuha sa ganitong paraan ay tinitiyak ang mataas na kalidad ng mga produkto, binabawasan ang kanilang gastos at pinatataas ang produktibidad ng paggawa.
Pinapayuhan ka naming basahin
 Sitwasyon sa malusog na pagkain "Mga bitamina na bumibisita sa mga bata
Sitwasyon sa malusog na pagkain "Mga bitamina na bumibisita sa mga bata Paano mabilis at madaling gumising sa umaga - madali at epektibong mga tip
Paano mabilis at madaling gumising sa umaga - madali at epektibong mga tip Mga sikolohikal na katangian ng mga bata sa pagdadalaga
Mga sikolohikal na katangian ng mga bata sa pagdadalaga Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan
Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan

