1.1 Pangunahing konsepto at uri
AUTOMATIC REGULATION
Ang awtomatikong kontrol ay isang hanay ng mga impluwensya na naglalayong ipatupad ang paggana ng control object alinsunod sa programa at layunin ng kontrol.
Ang control object ay nauunawaan bilang isang device kung saan pinapanatili ang halaga ng mga kinakailangang indicator ng isang proseso. Ang aktwal na estado ng control object ay tinutukoy ng isa o higit pang mga operating parameter y i , tinatawag na adjustable values o adjustable coordinates at pagtukoy sa mga aksyon ng control system (Fig. 1.1).
Alam mo ba ang mga pamamaraan, prinsipyo at pangunahing kaalaman ng automation? I-update ang proseso kung saan ang aktibidad ng tao ay papalitan ng aktibidad ng iba't ibang device at device! Ipapakilala namin sa iyo ang iba't ibang uri ng kontrol at kung paano gumagana ang kontrol sa automation.
Noong nakaraan, ang lahat ay kinokontrol ng kamay. Gayunpaman, nagbago ito sa pagsisimula ng automation. Ngayon ay nakikilala natin iba't ibang uri pamamahala. Ang kontrol ay isang aksyon sa isang bagay upang makamit ang isang ibinigay na layunin. Gayunpaman, palaging sinubukan ng lahat na alisin ang mapurol na pisikal at mental na mga aktibidad, na samakatuwid ay unti-unting nagsimulang sakupin ang mga vending machine. Kapag ang awtomatikong kontrol ay pinalitan ng manu-manong kontrol, maaari nating simulan ang pag-uusap tungkol sa simula ng automation. Hinahati namin ang awtomatikong kontrol sa direkta at hindi direkta.
AT sa totoong mga kondisyon, ang control object ay naiimpluwensyahan ng mga panlabas na impluwensya, na tinatawag na mga kaguluhan f i. Sa esensya, anumang pisikal na dami na nagpapakilala sa kinokontrol na bagay, halimbawa, ang bilis (linear at pag-ikot), boltahe at kasalukuyang, linear at angular na mga displacement, atbp. ay maaaring gamitin bilang mga regulated na dami.
Tatlong uri ng kontrol at kahulugan ng regulasyon
Sa una sa kanila, ang proseso ng kontrol ay nagaganap nang walang pinagmumulan ng kuryente. Sa kasalukuyan, gayunpaman, ang pangalawang uri ng pamamahala ng kapangyarihan ay karaniwang ginagamit at tinatalakay sa teksto sa ibaba. Maaari naming ibahagi ang automation control sa power supply depende sa kung sinusuportahan ang output nito.
Control Control mas mataas na anyo kontrol. . Ang kontrol ay isang paraan ng kontrol na hindi makokontrol sa anumang paraan. Ang regulasyon sa automation ay binubuo sa pagpapanatili pisikal na bilang sa isang palaging halaga o sa isang halaga na nagbabago ayon sa isang panuntunan. Ang mga halaga ng dami ay patuloy na inihahambing sa halaga na kinakailangan sa panahon ng kontrol. Ang anumang mga paglihis ay inaalis sa pamamagitan ng mga interbensyon sa proseso ng regulasyon. Ang sumusunod na figure ay malinaw na naglalarawan ng pagkakaiba sa pagitan ng kontrol at regulasyon.
Mga naaayos na halaga y i tinutukoy ng mga aksyong kontrol U i (t) sa input ng control object. Ang mga epektong ito ay nagdudulot ng mga pagbabago sa panloob na estado ng OS at, bilang resulta, sa kinokontrol na mga parameter ng operating.
Karaniwan, ang awtomatikong kontrol ay isinasagawa gamit ang mga awtomatikong control device nang walang interbensyon ng tao. Ang kumbinasyon ng awtomatikong control device at ang control object, na nakikipag-ugnayan sa isa't isa, ay bumubuo ng isang awtomatikong control system (ACS).
Mas mataas na anyo ng pamamahala at artificial intelligence
Ipinapakita ng diagram kung paano gumagana ang automation. Pinagmulan: Ivan Schwartz, Fundamentals of Automation. Kasama sa mas matataas na paraan ng kontrol ang pinakamainam na kontrol, adaptive control, pag-aaral, at artificial intelligence. Ang pinakamainam na kontrol ay kasing episyente hangga't maaari o, sa kabaligtaran, napakabilis. Nagagawa ng system na makamit ang mga ninanais na katangian na may kaunting pagkonsumo ng enerhiya, palaging naghahanap ng mga pinaka-kapaki-pakinabang na epekto at sa gayon ay tinitiyak ang pinakamahusay na pag-uugali ng system sa ilalim ng mga ibinigay na kondisyon.
Ang mga pangunahing uri ng awtomatikong kontrol ay:
1) awtomatikong kontrol na may bukas na kadena ng mga impluwensya (hard control);
2) awtomatikong regulasyon;
3) awtomatikong setting.
Ang mga awtomatikong sistema ng kontrol na may bukas na kadena ng mga impluwensya ay karaniwang tinatawag na bukas. Sa mga sistemang ito, ang kontrol ay isinasagawa ayon sa mga batas; independyente sa aktwal na kurso ng produksyon
Pagbuo ng isang functional diagram ng ACS
Sa adaptive na kontrol, maaari pa ngang baguhin ng system ang istraktura at mga parameter nito. Palaging umaangkop sa pinakamainam na proseso ng kontrol, umaangkop sa mga pagbabago sa mga parameter ng kinokontrol na bagay. Sa proseso ng pamamahala, na tinatawag na pag-aaral, ang adaptive system ay mas perpekto. Maaalala niya ang impormasyong natanggap at muling gamitin ito sa mga katulad na sitwasyon.
Ang artificial intelligence ay isang sistema na may pinakamataas na antas ng kontrol. Ang isang artipisyal na nilikha na sistema ay maaaring makilala ang mga bagay at phenomena at maaaring suriin ang kanilang mga relasyon. Lumilikha ito ng mga modelo ng kapaligiran at gumagawa ng mga makabuluhang desisyon at maaaring mahulaan ang mga kahihinatnan nito. Ang isang artificial intelligence system ay maaaring tumuklas ng mga bagong modelo at kahit na mapabuti ang pagganap nito.
proseso, at ginagawa sa isang bukas na loop upang makakuha ng tiyak na resulta (Larawan 1.2, a).
Mahirap na gawain sa input ng system sa pamamagitan ng control device CU at aparatong tagapagpaganap(amplifier) Ang DUT ay kumikilos sa control object ng op-amp, sa output kung saan nakatakda ang value X labasan naaayon sa gawaing ito X sa .
Mga prinsipyo ng pagpapatakbo ng control system sa pinamamahalaang sistema
Mayroong ilang mga paraan upang ipatupad ang awtomatikong kontrol. Ang lohikal, tuloy-tuloy, discrete at malabo na mga kontrol ay naiiba sa bawat isa sa pamamagitan ng prinsipyo ng pagpapatakbo ng control system sa kinokontrol na sistema. Ano ang mga katangian ng bawat uri ng pagmamaneho?
Nangyayari ito bilang resulta ng pag-deploy ng mga computer bilang controller upang kontrolin ang mga computer na hindi makapagproseso ng tuluy-tuloy na signal ay na-convert sa isang discrete na koneksyon sa pagitan ng mga input at output, dahil ang ugnayan sa pagitan ng sequence ng mga pulso ay nabasa sa pagkakasunud-sunod ng oras ng panahon ng sampling ang oras ng sampling ay nababawasan ng mabilis na kinokontrol na proseso.
- Gumagamit ang kontrol ng mga variable na may dalawang halaga.
- Mayroong palaging dalawang pagpipilian.
- Ang mga dami ay ipinahayag bilang mga halaga 1 at 0.
- Ang mga ugnayan sa pagitan ng mga variable ay tinatawag na mga lohikal na pag-andar.
- Permanenteng nakatakda ang aksyong aksyon.
- Ang mga dami ay patuloy na nagbabago sa paglipas ng panahon.
- Lumilikha ng tuluy-tuloy na link sa pagitan ng mga input at output.
Sa ganitong mga sistema, ang kurso ng proseso at ang output na kinokontrol na halaga ay hindi naitama (hindi kinokontrol), samakatuwid, maaari itong lumihis mula sa tinukoy na mode. Ang kontrol na ginagamit sa naturang mga sistema ay tinatawag na open-loop control.
Ang ACS na may bukas na kadena ng mga impluwensya ay ginagamit upang matiyak ang isang tiyak na pagkakasunud-sunod ng pagpapatakbo ng iba't ibang elemento ng mga awtomatikong device. Sa mas kumplikadong mga kaso, ang kontrol ng programa ng isang proseso na may bukas na cycle ng mga impluwensya ay maaaring isagawa. Ang isang halimbawa ay ang control system para sa pagsisimula at pagpepreno ng mga makina.
Ang katotohanan na ang mga function ng kontrol ay nakalkula nang digital sa kasong ito ay ang dahilan para sa discretization sa panahon ng pagpapatakbo ng system. Ang terminong discrete system mismo, sa kaibahan sa isang tuluy-tuloy na sistema, ay nangangahulugan na ang mga halaga na kasama sa proseso ay nasa anyo ng isang pagkakasunud-sunod ng mga pulso, na tumutugma sa representasyon ng function lamang sa tiyak at, sa prinsipyo, katumbas. mga agwat ng oras. Ang isa pang uri ng sampling, na naroroon din sa mga digital control system, ay ang signal value quantization.
Sa mga totoong system, ang pinakamahalagang dahilan para sa paglitaw ng mga minimum na halaga ng pagbabago bilang karagdagan sa haba ng salita na ginamit sa microcontroller ay ang katumpakan ng pagproseso na nakuha sa mga analog-to-digital converter. Pangkalahatang pamamaraan Ang discrete control system ay ipinapakita sa figure. Ang controller block ay kinakatawan sa solusyon na ito sa pamamagitan ng isang control algorithm na nakapaloob sa microcontroller program. Ang sinusukat na dami - na bumubuo sa signal ng feedback - ay ipinasok sa microcontroller lamang sa tinatawag na mga sandali ng sampling, na paulit-ulit na may isang panahon.
Sa mga open-loop control system, ang kontrol ay isinasagawa ayon sa master action, na, sa pangkalahatang kaso maaaring kumatawan sa mga utos ng programa.
Ang prinsipyong ito ay binubuo sa katotohanan na upang mabawasan ang paglihis ng kinokontrol na variable mula sa itinakdang halaga, na lumilitaw dahil sa pagkawalang-kilos ng object system, ang control action ay nabuo alinsunod sa aksyon na ito at ang mga katangian ng control object. (Larawan 1.2, a). 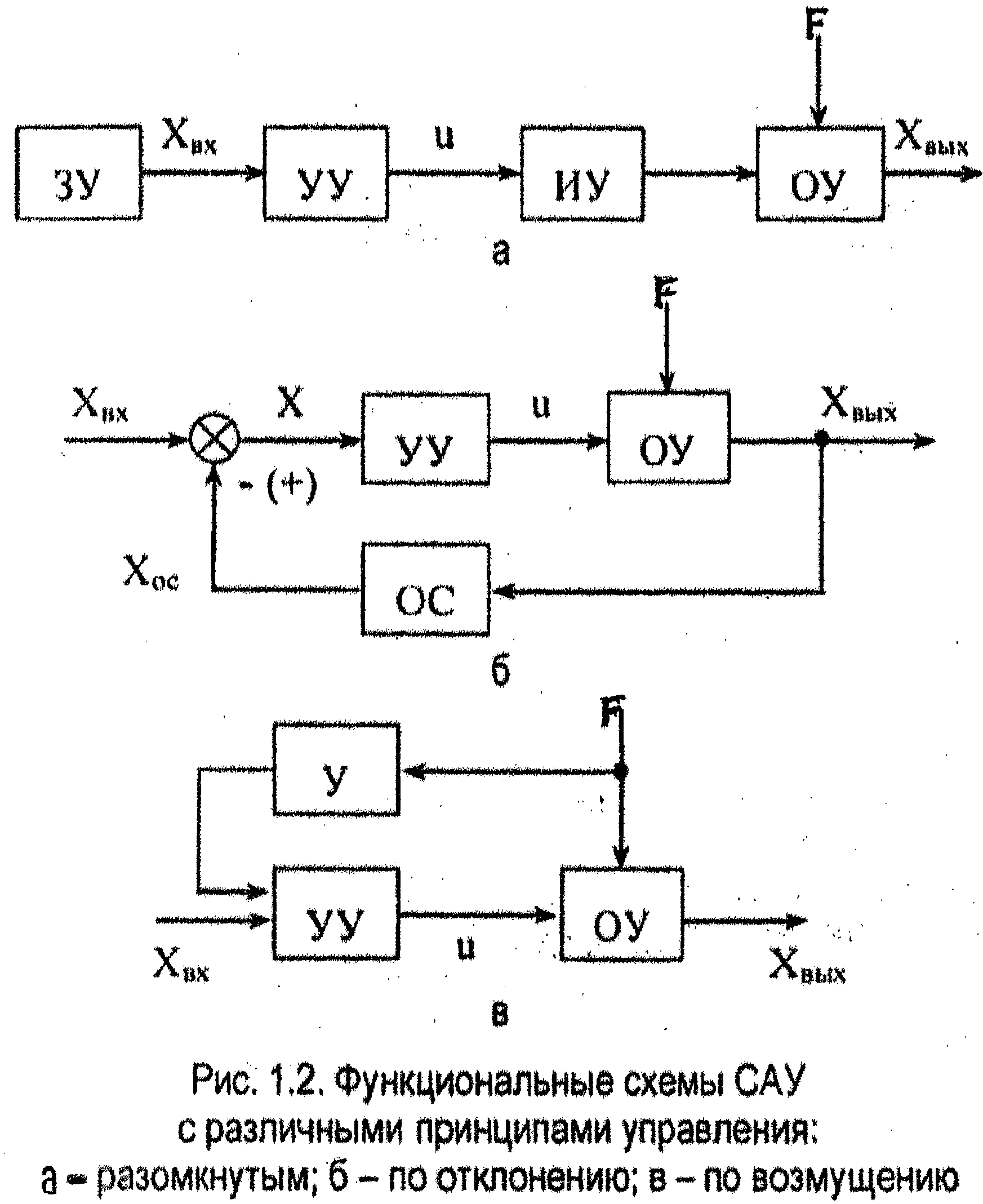
Ang resulta ng pagkalkula ng control algorithm ay ipinasok din na may sampling rate, kung saan ito ay ginagamit sa numerical form upang kontrolin ang executive system, o nangangailangan ng conversion sa isang analog na halaga. Pinapalitan ng mga discrete digital circuit ang mga analog system. Ginagarantiyahan ng digital system ang katatagan ng mga parameter ng kontrol sa paglipas ng panahon at may mga pagbabago sa temperatura, pati na rin ang kadalian ng pagbabago ng mga ito, kahit na ang aparato ay kinokontrol. Sa kurso ng trabaho, katanggap-tanggap din na baguhin ang istraktura ng system, na lubos na nagpapataas ng kakayahang umangkop ng pamamahala.
Kino-convert at pinapalaki ng control device ang master action at bumubuo ng control action na u(t).
Ang kontrol na aksyon mula sa output ng control unit ay pumapasok sa control object ng control unit at naglalayong baguhin ang kinokontrol na halaga X labasan alinsunod sa puwersang nagtutulak.
Ang ganitong kontrol ay tinatawag na matibay, dahil hindi nito isinasaalang-alang ang aktwal na mga halaga ng kinokontrol na variable at nakakagambalang mga impluwensya (ang mga parameter ng ACS ay itinuturing na pare-pareho).
Sa pangkalahatan, ang mga digital controller ay higit na may kakayahang gumamit ng mga modernong pamamaraan ng kontrol, na isinasaalang-alang ang medyo kumplikadong mga operasyon sa matematika. Ang mga pamamaraan ng pag-optimize na ginagamit sa mga digital na sistema ng kontrol ay maaaring isaalang-alang ang mas kumplikadong pamantayan, tulad ng mahalagang pamantayan na nagmula sa mga modernong istruktura ng kontrol sa espasyo ng estado. Dahil sa kadalian ng pagbabago ng mga parameter sa panahon ng pagpapatakbo ng system, ang mga controller ay nilikha na may pag-aari ng self-tuning sa mga parameter ng isang partikular na bagay batay sa mga sukat na awtomatikong isinagawa sa panahon ng startup.
BATAYANG MGA PRINSIPYO NG PAMAMAHALA
Depende sa mga paraan ng pagbuo ng pagkilos ng kontrol, ang mga sumusunod na prinsipyo ng kontrol ay nakikilala:
Prinsipyo ng kontrol sa kaguluhan,
Prinsipyo ng kontrol sa paglihis,
Ang prinsipyo ng pinagsamang kontrol.
PRINSIPYO SA PAGKONTROL NG GULO
Ang pagbabawas o pag-aalis ng paglihis ng kinokontrol na variable mula sa kinakailangang halaga, na sanhi ng impluwensya ng iba't ibang mga kaguluhan sa mga bukas na sistema, ay maaaring isagawa sa pamamagitan ng paglalapat ng prinsipyo ng kontrol sa kaguluhan, na tinalakay sa ibaba. Ang functional diagram ng disturbance control ay ibinibigay sa Fig. 1.2, c. Ang prinsipyo ng kontrol sa kaguluhan ay upang mabawasan o maalis ang paglihis ng kinokontrol na variable X labasan mula sa itinakdang halaga, sinusukat ang pangunahing nakakagambalang epekto F at na-convert sa isang control action na u(t) na inilapat sa system input upang mabayaran ang deviation ng kinokontrol na variable na dulot ng perturbation. Samakatuwid, sa mga ganitong sistema, ang pagkilos ng kontrol ay isang function ng aksyong nakakagambala.
sa mga system na may prinsipyo ng kontrol sa pamamagitan ng perturbation para sa pagbuo ng control action u(t) ginagamit ang direktang impormasyon tungkol sa nakakagambalang epekto. Samakatuwid, sa mga sistemang ito, posible na ganap na mabayaran ang impluwensya ng nakakagambalang pagkilos sa kinokontrol na halaga X labasan . Ang antas ng kabayaran para sa impluwensya ng nakakagambalang impluwensya ay nakasalalay sa katumpakan ng pagsukat ng nakakagambalang impluwensya at mga katangian ng op-amp.
Ang bentahe ng ACS na may prinsipyo ng kontrol sa kaguluhan ay pinapayagan ka nitong ganap na mabayaran ang nakakagambalang epekto. Ang ganitong mga awtomatikong control system ay open-loop, samakatuwid, tulad ng sa anumang open-loop system, walang problema sa katatagan dito.
Kung mayroong ilang mga nakakagambalang impluwensya sa system, lahat ng mga ito ay maaaring mabayaran nang hiwalay sa parehong paraan, kung posible na sukatin ang mga ito. Gayunpaman, ginagawa nitong kumplikado ang sistema. Sa pagsasagawa, ang mga nakakagambalang impluwensya lamang ang binabayaran, na pinaka-malubhang nakakaapekto sa kinokontrol na halaga at nagiging sanhi ng mga makabuluhang paglihis nito mula sa kinakailangang halaga. Ang ganitong mga kaguluhan ay tinatawag na pangunahing. Ang mga maliliit na abala ay tinatawag na mga kaguluhan na nagdudulot lamang ng mga maliliit na paglihis ng kinokontrol na halaga mula sa itinakdang halaga.
Ang kawalan ng naturang ACS ay inaalis nila ang impluwensya ng mga pangunahing kaguluhan lamang. Bilang karagdagan, ang katumpakan ng regulasyon at kabayaran ay nababawasan kapag nagbago ang mga katangian ng op-amp.
Ang prinsipyo ng kontrol sa kaguluhan ay ginagamit sa mga system na idinisenyo upang mapanatili ang isang palaging kinokontrol na variable.
PRINSIPYO SA PAGKONTROL NG DEFLECTION
Ang awtomatikong regulasyon ay nailalarawan sa pamamagitan ng katotohanan na ang mga function ng kontrol ay nakasalalay sa aktwal na kurso ng produksyon proseso upang mapanatili ang kinakailangang pagganap ito proseso. Ang kontrol at impormasyon tungkol sa aktwal na mga halaga ng mga tagapagpahiwatig ng prosesong ito ay isinasagawa gamit ang feedback.
Sa pangkalahatang kaso, ang ganitong awtomatikong sistema ng kontrol ay maaaring ipakita sa Fig. 1.2, b. Gumagamit ang system ng closed-loop control (prinsipyo ng feedback o deviation control). Ang control deviation ay ang pagkakaiba sa pagitan ng aktwal na sinusukat na halaga at ng itinakdang halaga. Ang katumbas na pagkakaiba sa pagitan ng setpoint at ang aktwal na halaga ay tinatawag na control error. Ang control device ay nauunawaan bilang isang teknikal na aparato sa tulong kung saan ang control object ay awtomatikong kinokontrol.
Kinokontrol na halaga X labasan tinutukoy ng impluwensya sa pagmamaneho X sa = X h sa input ng system, ibig sabihin, ang impluwensyang ipinakilala sa system at pagtukoy ng kinakailangang batas ng pagbabago sa kinokontrol na variable. Sa input ng system sa elemento ng paghahambing, bilang karagdagan sa master action, ang aktwal na halaga ng kinokontrol na variable ay pinapakain sa pamamagitan ng feedback circuit. Sa output ng elemento ng paghahambing, i.e. sa input ng control device CU, lumilitaw ang isang deviation o control action
![]() ,
,
na nagbibigay ng pagbabago sa kinokontrol na halaga ayon sa isang ibinigay na batas.
Ang control device, depende sa laki at senyales ng pagkansela, ay bumubuo ng isang regulasyong aksyon at. Kaya, ang prinsipyo ng closed control ay isinasaalang-alang hindi lamang ang gawain, kundi pati na rin ang aktwal na estado ng control object at ang mga umiiral na kaguluhan. Samakatuwid, ang prinsipyong ito ay ang pinaka-unibersal at nagbibigay-daan sa iyo upang matagumpay na malutas ang mga problema sa kontrol, sa kabila ng kawalan ng katiyakan ng control object at ang likas na katangian ng mga kaguluhan.
Ang klase ng naturang mga awtomatikong sistema, na binuo batay sa prinsipyo ng closed control, ay tinatawag na automatic control system (ACS). Ang pag-aari ng pagiging pandaigdigan ng naturang mga sistema ay nagpapahintulot sa kanila na magamit nang napakalawak sa teknolohiya at kalikasan.
Ang feedback sa mga closed automatic control system ay nagsisilbing pagbuo ng mga static at dynamic na katangian ng system. Ang mga katangiang ito ay tinutukoy ng layunin ng awtomatikong sistema ng kontrol at ang mga kinakailangan na ipinataw dito sa pamamagitan ng teknolohikal na proseso. Kinokontrol ng feedback ang takbo ng proseso at, sa kaso ng paglihis nito mula sa tinukoy, ang mga corrective signal ay ipinapadala sa input ng system o sa input ng isang pangkat ng mga elemento na sakop ng feedback na ito.
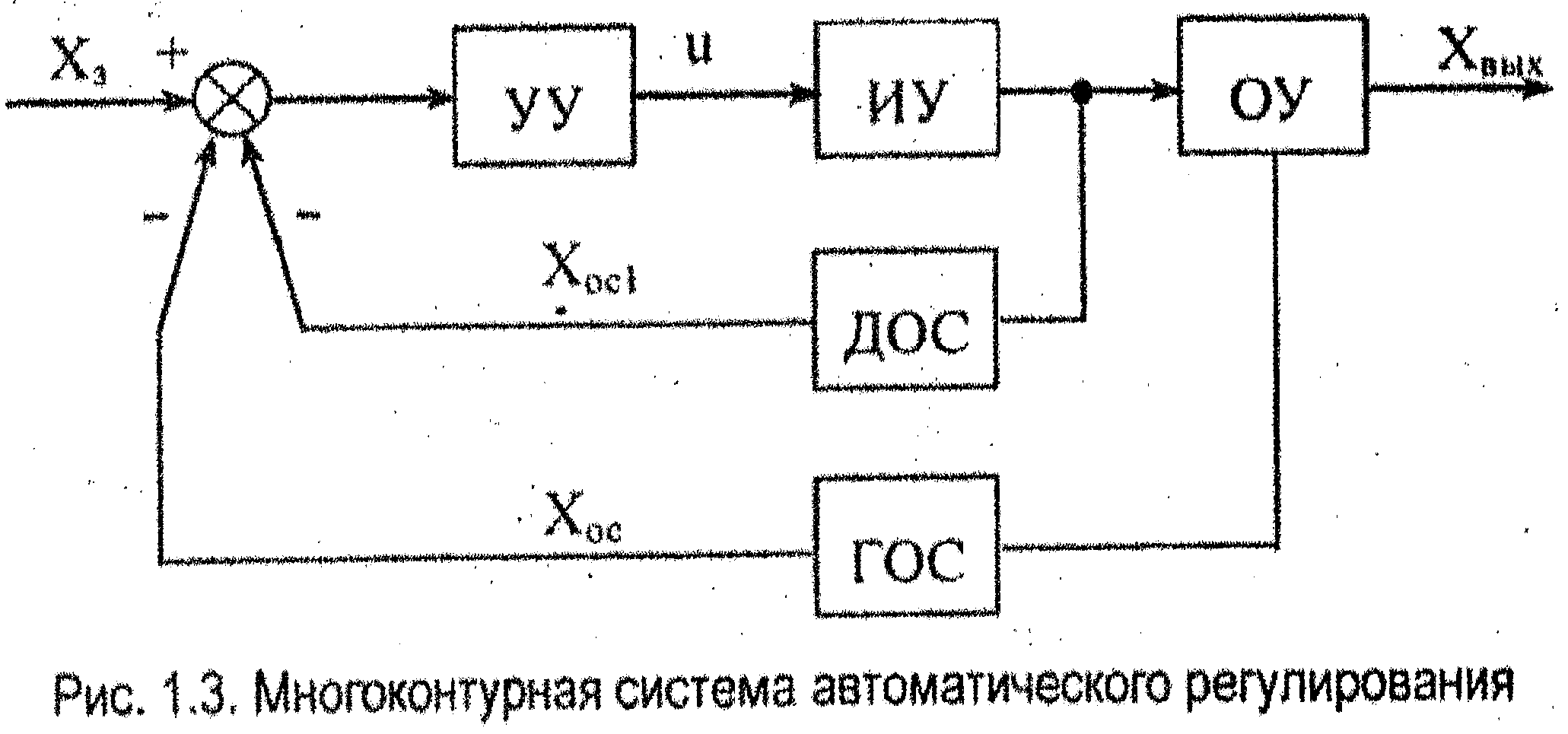
Ang ACS ay dapat magkaroon ng hindi bababa sa isang feedback, na nagsisilbing ihambing ang aktwal at itinakda na mga halaga ng kinokontrol na variable. Ang ganitong feedback ay tinatawag na pangunahing isa. Ikinokonekta nito ang output ng system kasama ang input nito, na sumasaklaw sa lahat ng pangunahing elemento. Ang mga system na may isang pangunahing feedback (GOS) ay tinatawag na single-loop. Ang ilang ACS, bilang karagdagan sa mga pangunahing feedback (GOS), ang bilang nito ay tinutukoy ng bilang (GOS) ng mga kinokontrol na variable, ay maaaring magkaroon ng ilang karagdagang (lokal) na mga variable. Ang karagdagang feedback (DOS) ay nag-uugnay sa output ng isa o higit pang mga elemento ng system. Ang ACS na, bilang karagdagan sa pangunahing isa, ay may isa o higit pang mga karagdagang feedback ay tinatawag na multi-loop (Larawan 1.3).
Depende sa likas na katangian ng nailipat na epekto, ang mga feedback ay nahahati sa matibay at nababaluktot. Ang mga matibay na feedback ay gumagana pareho sa steady state at sa transient mode. Ang mga flexible na feedback ay gumagana lamang sa mga transient mode. Ang mga paraan ng pagpapatupad ng mahirap na feedback ay iba't ibang mga aparato sa pagsukat - mga sensor na nagpapadala ng signal sa node ng paghahambing. Ang mga paraan ng pagpapatupad ng mga naiaangkop na feedback ay mga differentiation at integration device.
Ayon sa epekto sa system, ang mga feedback ay nahahati sa positibo at negatibo. Positibo kung ang control signal sa input ay tumaas nang may pagtaas sa output signal, at negatibo kung ang control signal sa input ay bumaba sa pagtaas ng output signal.
Ang mga disadvantages ng disturbance controlled system ay maaaring alisin sa pamamagitan ng paggamit ng pinagsamang control system, kung saan ang disturbance control ay pinagsama sa deviation control. Sa kasong ito, ang impluwensya sa proseso ng kontrol ng pangunahing kaguluhan ay inalis. Bilang karagdagan, dahil sa pagkakaroon ng feedback sa kinokontrol na halaga , limitado ang epekto ng maliliit na kaguluhan. Minsan ang mga sistemang ito ay tinatawag na open-closed. Mayroon silang medyo mataas na katumpakan ng pagpapanatili ng isang naibigay na kinokontrol na halaga.
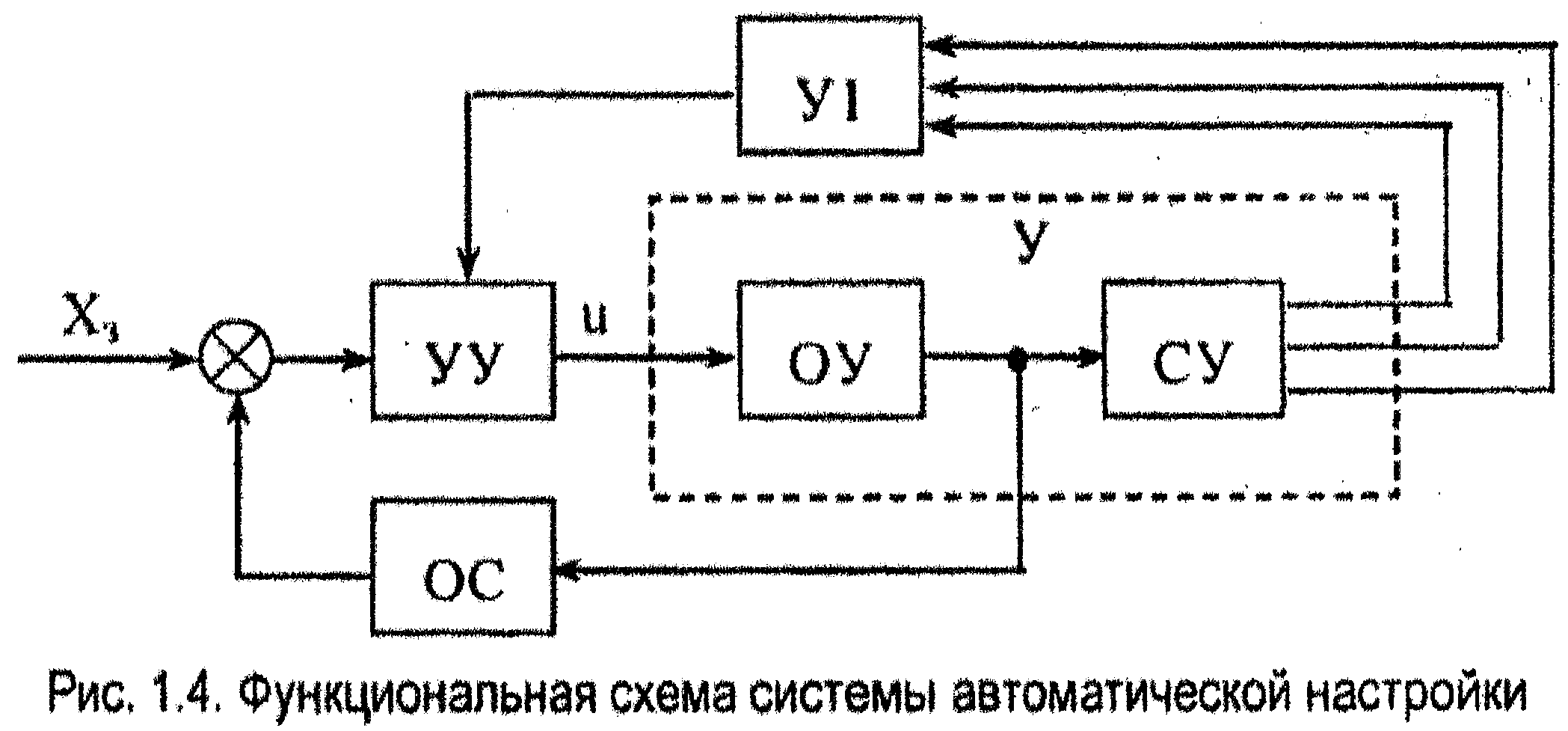
Ang isang functional diagram ng control system na nagbibigay ng pag-tune at pagpili ng kinakailangang control algorithm depende sa mga pagbabago sa mga kondisyon ng operating at mga parameter ng control object ay ipinapakita sa fig. 1.4.
| Nilalaman | 2 | |
| Panimula | 3 | |
| 1. | isang karaniwang bahagi | |
| 1.1. | Pangunahing konsepto | 6 |
| 1.2. | Paglalarawan ng orihinal na scheme ng awtomatikong kontrol | 9 |
| 1.3. | Pagbuo ng isang functional diagram ng ATS | 13 |
| 2. | Bahagi ng pag-areglo | |
| 2.1. | Parametric synthesis at pagsusuri ng isang single-loop ACS | 14 |
| 2.1.1. | Pagsusuri ng posibilidad ng static na kontrol | 15 |
| 2.1.2. | Pagsusuri ng posibilidad ng astatic control | 20 |
| 2.1.3. | Pag-aaral ng kalidad ng isang single-loop ATS | 22 |
| 3. | Pagbuo ng isang control loop na may ibinigay na parameter | 25 |
| Konklusyon | 27 | |
| Bibliograpiya | 28 |
Panimula
Ang modernong teorya ng awtomatikong kontrol ay ang pangunahing bahagi ng teorya ng kontrol. Ang awtomatikong sistema ng kontrol ay binubuo ng isang adjustable na bagay at mga kontrol na kumikilos sa bagay kapag ang isa o higit pang adjustable variable ay nagbago. Sa ilalim ng impluwensya ng mga signal ng input (kontrol o kaguluhan), nagbabago ang mga kinokontrol na variable. Ang layunin ng regulasyon ay bumuo ng mga naturang batas, kung saan ang mga variable na kinokontrol ng output ay magiging kaunti lamang ang pagkakaiba sa mga kinakailangang halaga. Ang solusyon sa problemang ito sa maraming kaso ay kumplikado sa pagkakaroon ng mga random na perturbations (ingay). Sa kasong ito, kinakailangang pumili ng naturang batas ng kontrol kung saan ang mga signal ng kontrol ay dadaan sa system na may mababang pagbaluktot, at ang mga signal ng ingay ay halos hindi maipapadala.
Malayo na ang narating ng teorya ng awtomatikong kontrol sa pag-unlad nito. Sa paunang yugto, ang mga pamamaraan ay nilikha para sa pagsusuri ng katatagan, kalidad at katumpakan ng regulasyon ng tuluy-tuloy mga linear na sistema. Pagkatapos ang mga paraan ng pagsusuri ng discrete at discrete- tuloy-tuloy na mga sistema. Mapapansin na ang mga pamamaraan para sa pagkalkula ng tuluy-tuloy na mga sistema ay batay sa mga pamamaraan ng dalas, at ang pagkalkula ng mga discrete at discrete-continuous na mga sistema ay batay sa mga z-transform na pamamaraan.
Sa kasalukuyan, ang mga pamamaraan para sa pagsusuri ng mga nonlinear na awtomatikong sistema ng kontrol ay binuo. Ang paglabag sa prinsipyo ng superposition sa mga nonlinear system, ang pagkakaroon ng isang bilang ng mga alternating (depende sa epekto) na mga rehimen ng matatag, hindi matatag na mga galaw at self-oscillations ay nagpapalubha sa kanilang pagsusuri. Ang taga-disenyo ay nakatagpo ng mas malaking paghihirap kapag kinakalkula ang matinding at self-adjusting control system.
Parehong ang teorya ng awtomatikong kontrol at ang teorya ng kontrol ay kasama sa agham sa ilalim ng pangkalahatang pangalan na "technical cybernetics", na ngayon ay nakatanggap ng makabuluhang pag-unlad. Pinag-aaralan ng teknikal na cybernetics ang mga pangkalahatang pattern ng kumplikadong mga dynamic na control system para sa teknolohikal at mga proseso ng produksyon. Ang mga teknikal na cybernetics, awtomatikong kontrol at awtomatikong regulasyon ay umuunlad sa dalawang pangunahing direksyon: ang una ay nauugnay sa patuloy na pag-unlad at pagpapabuti sa disenyo ng mga elemento at ang teknolohiya ng kanilang paggawa; ang pangalawa - na may pinaka-makatuwirang paggamit ng mga elementong ito o ang kanilang mga grupo, na siyang gawain ng pagdidisenyo ng mga sistema.
Ang disenyo ng mga awtomatikong sistema ng kontrol ay maaaring isagawa sa dalawang paraan: sa pamamagitan ng paraan ng pagsusuri, kapag, na may isang paunang napiling istraktura ng system (sa pamamagitan ng pagkalkula o pagmomolde), ang mga parameter nito ay tinutukoy;
paraan ng synthesis, kapag, ayon sa mga kinakailangan, ang sistema ay agad na napili
ang pinakamahusay na istraktura at mga parameter nito. Ang parehong mga pamamaraan na ito ay malawak praktikal na gamit at samakatuwid ay ganap na sakop sa aklat na ito.
Ang pagtukoy sa mga parameter ng system, kapag ang istraktura at mga kinakailangan nito para sa buong sistema sa kabuuan ay kilala, ay tumutukoy sa problema ng synthesis. Ang solusyon sa problemang ito sa isang linear control object ay matatagpuan gamit, halimbawa, frequency method, root locus method, o sa pamamagitan ng pag-aaral ng mga trajectory ng mga ugat ng katangian na equation ng isang closed system. Pagpili ng isang corrective device sa pamamagitan ng synthesis sa silid-aralan fractional rational function ang kumplikadong variable ay maaaring gawin gamit ang graph Analytical pamamaraan. Ginagawang posible ng parehong mga pamamaraan na mag-synthesize ng mga corrective device na pinipigilan ang self-oscillating at hindi matatag na periodic mode sa mga nonlinear system.
Ang mga pamamaraan ng synthesis ay karagdagang binuo batay sa mga prinsipyo ng maximum at dynamic na programming, kapag ang pinakamainam na batas ng kontrol mula sa punto ng view ng isang naibigay na pamantayan ng kalidad ay natutukoy, na nagbibigay ng pinakamataas na limitasyon ng kalidad ng system, na dapat na pinagsikapan kapag nagdidisenyo nito. Gayunpaman, ang solusyon sa problemang ito ay halos hindi laging posible dahil sa pagiging kumplikado ng paglalarawan ng matematika ng mga pisikal na proseso sa system, ang imposibilidad ng paglutas ng problema sa pag-optimize mismo at ang mga kahirapan sa teknikal na pagpapatupad ng natagpuang nonlinear na batas ng kontrol. Dapat tandaan na ang pagpapatupad ng mga kumplikadong batas sa kontrol ay posible lamang kapag ang isang digital na computer ay kasama sa loop ng system. Ang paglikha ng mga extreme at self-adjusting system ay nauugnay din sa paggamit ng analog o digital na mga computer.
Ang pagbuo ng mga awtomatikong sistema ng kontrol, bilang panuntunan, ay isinasagawa batay sa mga analytical na pamamaraan ng pagsusuri o synthesis. Sa yugtong ito ng pagdidisenyo ng mga control system, batay sa mga tinatanggap na pagpapalagay, ang isang matematikal na modelo ng system ay pinagsama-sama at ang paunang istraktura nito ay napili. Depende sa uri ng modelo (linear o non-linear), ang isang paraan ng pagkalkula ay pinili upang matukoy ang mga parameter na nagbibigay ng mga tinukoy na tagapagpahiwatig ng katatagan, katumpakan at kalidad. Pagkatapos nito, ang modelo ng matematika ay pino at, gamit ang mga paraan pagmomolde ng matematika matukoy ang mga dynamic na proseso sa system. Sa ilalim ng pagkilos ng iba't ibang mga signal ng input, ang mga katangian ng dalas ay kinuha at inihambing sa mga kinakalkula. Pagkatapos ang mga margin ng katatagan ng system sa phase at modulus ay sa wakas ay naitatag at ang mga pangunahing tagapagpahiwatig ng kalidad ay natagpuan.
Dagdag pa, ang pagtatakda ng mga tipikal na pagkilos ng kontrol sa modelo; alisin ang mga katangian ng katumpakan. Sa batayan ng pagmomodelo ng matematika, ang mga teknikal na kinakailangan para sa kagamitan ng system ay iginuhit. Ang isang controller ay binuo mula sa manufactured equipment at inilipat sa semi-natural na pagmomodelo, kung saan ang control object ay kinokolekta sa anyo ng isang mathematical model.
Batay sa mga katangiang nakuha bilang resulta ng pagmomolde ng HIL, ang isang desisyon ay ginawa sa pagiging angkop ng controller upang gumana sa isang tunay na bagay ng regulasyon. Ang pangwakas na pagpili ng mga parameter ng controller at ang pagsasaayos nito ay isinasagawa sa mga natural na kondisyon sa panahon ng eksperimentong pag-unlad ng control system.
Ang pagbuo ng teorya ng awtomatikong kontrol batay sa mga equation ng state at z-transforms, ang pinakamataas na prinsipyo at ang dynamic na paraan ng programming ay nagpapabuti sa paraan ng pagdidisenyo ng mga control system at nagbibigay-daan sa iyo upang lumikha ng lubos na mahusay na mga awtomatikong system para sa pinaka. iba't ibang industriya Pambansang ekonomiya. Ang mga awtomatikong sistema ng kontrol na nakuha sa ganitong paraan ay tinitiyak ang mataas na kalidad ng mga produkto, binabawasan ang kanilang gastos at pinatataas ang produktibidad ng paggawa.
1. Pangkalahatang bahagi.
1.1. Pangunahing konsepto
Conversion ng input ng system (kontrol na pagkilos) sa output signal (adjustable value) tinutukoy ang batas ng pagbabago ng kinokontrol na halaga. Pagsasakatuparan ng ninanais ipinatupad ang batas bilang resulta pagbuo mga variable ng kontrol, na nakakaapekto sa kinokontrol na sistema. Ang mga batas ng pagbabago ng kinokontrol na halaga sa oras ay maaaring iba; inilarawan ang mga ito sa matematika operator ng system. Ang operator na ito ay maaaring magpatupad ng proporsyonal na pagdepende ng output signal sa input, isang koneksyon sa anyo ng isang derivative o isang integral, atbp. Sa isang mas pangkalahatang kaso, ang operator na ito ay maaari ding maging non-linear.
Dapat pansinin na ang mga batas ng pagbabago ng mga kinokontrol na halaga sa mga makina at yunit ay nilalabag sa ilalim ng impluwensya ng panlabas at kung minsan ay panloob na impluwensya, na tinatawag na mga kaguluhan. (o nakakagambalang mga impluwensya). Mula sa kahulugan ng mga impluwensyang ito, makikita na ang awtomatikong sistema ng kontrol ay dapat na kopyahin ang pagkilos ng kontrol nang tumpak hangga't maaari at tumugon nang kaunti hangga't maaari sa nakakagambalang pagkilos.
May tatlo magkaibang prinsipyo pagbuo ng mga control system na nagsisiguro sa pagpapatupad ng kinakailangang batas ng pagbabago sa kinokontrol na variable: open-loop, closed-loop, pinagsamang-loop regulasyon (sarado-bukas). Ang prinsipyo ng isang bukas na cycle ay upang tiyakin ang kinakailangang batas ng pagbabago ng kinokontrol na variable nang direkta sa pamamagitan ng pag-convert ng control action. Ang prinsipyo ng isang closed cycle ay nailalarawan sa pamamagitan ng paghahambing ng control action sa aktwal na pagbabago sa controlled variable dahil sa application. puna at elemento ng paghahambing. Ang signal ng error na nagreresulta mula sa paghahambing ay hindi dapat lumampas sa isang tiyak na paunang natukoy na halaga. Dahil dito, ang kinakailangang batas ng pagbabago ng kinokontrol na variable ay natiyak sa mga saradong sistema. Ang pinagsamang prinsipyo ay binubuo sa kumbinasyon ng mga sarado at bukas na mga loop sa isang sistema.
Awtomatikong kontrol tinatawag na proseso kung saan
ang mga operasyon ay ginagawa ng isang sistema na gumagana nang walang interbensyon ng tao alinsunod sa isang paunang natukoy na algorithm.
Ang isang awtomatikong sistema na may closed circuit ng impluwensya, kung saan nabuo ang kontrol (regulatoryong) aksyon bilang resulta ng paghahambing ng tunay na halaga ng kinokontrol (naaayos) na dami sa ibinigay (iniresetang) halaga nito, ay tinatawag ASR.
Proseso ng paggawa- isang hanay ng mga magkakaugnay na proseso ng paggawa at teknolohikal, sa panahon ng pagpapatupad kung saan ang mga hilaw na materyales at semi-tapos na mga produkto ay na-convert sa mga natapos na produkto.
Awtomatiko ay ang mga aparatong kumokontrol iba't ibang proseso at kontrolin sila nang walang direktang interbensyon ng tao.
Ang paksa o prosesong pag-aaralan ay tinatawag bagay, at lahat ng nakapalibot na bagay na nakikipag-ugnayan sa kanila - panlabas na kapaligiran.
Sistema- isang hanay ng mga elemento o aparato na nasa mga relasyon at koneksyon sa isa't isa at bumubuo ng isang tiyak na integridad (pagkakaisa).
Kontrolin ang bagay- isang hanay ng mga teknolohikal na aparato (mga makina, tool, mekanisasyon) na nagsasagawa ng prosesong ito mula sa punto ng view ng pamamahala.
Kontrolin ang operasyon- nagbibigay sa tamang oras ng simula, pagkakasunud-sunod at pagwawakas ng mga operasyon sa trabaho, naglalaan ng mga mapagkukunang kinakailangan para sa kanilang pagpapatupad.
Sa ilalim pamamahala maunawaan ang proseso ng pag-aayos ng gayong may layunin na epekto sa control object, bilang isang resulta kung saan ang huli ay napupunta sa kinakailangang (may layunin) na estado.
Ang mga parameter ng isang proseso ng produksyon o isang proseso o isang bagay ng proseso na dapat na patuloy na panatilihin o baguhin ayon sa isang tiyak na batas ay tinatawag kinokontrol na dami.
Ang halaga ng kinokontrol na variable, na, ayon sa gawain, ay dapat sa isang naibigay na oras, ay tinatawag ang ibinigay na halaga ng kinokontrol na variable (controlled parameter).
Ang isang diagram na naglalarawan sa pagkakasunud-sunod ng mga proseso sa loob ng isang aparato o sistema ay tinatawag diagram ng istruktura.
Link- isang elemento na kasama sa ACS kung saan ang input parameter ay na-convert sa isang tiyak na paraan sa output parameter (ito ay schematically depicted bilang isang bloke, ngunit hindi sumasalamin sa mga tampok ng disenyo nito).
Palaging nauugnay ang impormasyon sa isang materyal na carrier ng ilang pisikal na dami. AT mga teknikal na sistema ang mga naturang carrier ay tinatawag mga tagapagdala ng signal(halimbawa, mga de-koryenteng boltahe at kasalukuyang, presyon, mekanikal na paggalaw, atbp.), na maaaring baguhin alinsunod sa ipinadalang impormasyon.
1.2. Paglalarawan ng orihinal na scheme ng awtomatikong kontrol.
Dahil ang regulated object ay isang elemento o link ng ACP, ang mga katangian ng ACP ay pangunahing nakadepende sa mga katangian ng regulated object. Samakatuwid, upang lumikha ng isang maisasagawa na ACP na nagbibigay ng kinakailangang kalidad ng regulasyon, ito ay kinakailangan, una sa lahat, upang malaman ang mga katangian ng regulated object (spastic at dynamic).
Ang object ng regulasyon ng laboratory stand ay isang bagay na may mga ipinamamahagi na mga parameter, dahil ang kinokontrol na halaga (temperatura) ay hindi pareho sa iba't ibang mga punto ng bagay sa parehong estado ng balanse at sa mode ng paglipat.
Upang madagdagan ang pagkawalang-kilos ng bagay, na dapat na sampung beses na mas malaki kaysa sa sinusukat sa bagay na ito ng sensor, isang metal na tasa na puno ng mga chips ay ibinigay, kung saan matatagpuan ang sensor ng temperatura. Pinapayagan ka nitong dagdagan ang dami ng init ng bagay.
Ang kinakailangang temperatura (reference) ay itinakda ng device sa pasukan ng controller-setter (t e).
Pagkagambala
kanin. 1. Regulatory scheme.
Ang aktwal na temperatura ay ginagawang signal ng device t f. Ang pagtukoy sa mga signal sa output ng mga device na ito sa pamamagitan ng mga titik na katulad ng mga ito, ipinapahayag namin ang aktwal na paglihis mula sa kinakailangan sa anyo ng isang signal: ∆t = t e - t f; tinatawag na deviation o mismatch. Kino-convert ng controller ang ∆t ayon sa isang tiyak na batas ng kontrol at i-on ang actuator. Sa aming kaso, ang gawain ng regulator ay ang pagkatubig ng mga deviations ∆t sanhi ng pagkilos ng mga kaguluhan B, i.e. iba't ibang mga naglo-load sa mga bagay na kontrol (mga pagbabago sa temperatura ng kapaligiran, mga pagbabago sa posisyon ng gate, atbp.).
Ang isang error ∆t ay maaari ding mangyari dahil sa isang pagbabago sa t e, ngunit dahil ito ay isang function na kilala nang maaga, ang error ay maaari ding kalkulahin nang maaga at mabayaran. Ang ganitong sistema ay tinatawag na program control system o simpleng ACS.
Ang stand ay nagbibigay ng dalawang posisyon na regulasyon. Sa kasong ito, kinakailangan upang buksan ang damper upang ang electric heating element ay patuloy na tinatangay ng hangin. Ang temperatura ay kinokontrol sa pamamagitan ng pag-on o off ng heating element ng relay element.
Upang matukoy ang mga dynamic na katangian ng bagay, ang isang self-recording device ay naka-install sa stand, na nagrerehistro ng mga pagbabago sa temperatura sa bagay at inaayos ang mga ito sa isang chart tape.
Ang anumang teknolohikal na yunit na object ng regulasyon ng OR ay gumagana sa isang matatag na estado kung ang balanse ng materyal at enerhiya ay ganap na sinusunod dito. Ang pangunahing parameter na nagpapakilala sa mga kondisyon para sa daloy ng teknolohikal na proseso (sa aming bagay na ito ay temperatura) ay nananatiling hindi nagbabago sa matatag na estado.
Ang dependence ng output value sa input value sa steady state ay tinatawag na static na katangian ng OR. Ang mga static na katangian ay maaaring parehong linear, na may iba't ibang slope coefficient, at non-linear, habang ang karamihan sa mga tunay na bagay sa pangkalahatan ay may mga hindi linear.
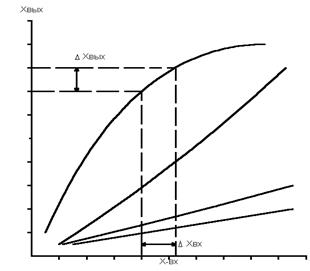
Fig 1.1. Mga static na katangian ng OR.
Ang mga katangiang ito ng OR ay ginagawang posible upang masuri ang antas ng koneksyon sa pagitan ng iba't ibang mga halaga ng input at output ng bagay.
Ang mga static na katangian ay tinutukoy sa pamamagitan ng pagkalkula o pang-eksperimentong.
Dynamic na katangian ng regulated object ay tinatawag na dependence ng output value sa input value sa transient mode.
Dahil ang mga pagbabago sa halaga ng output ng RR sa ilalim ng iba't ibang mga kaguluhan ay maaaring mangyari sa iba't ibang paraan, karaniwang ginagamit ang mga tipikal na panlabas na impluwensya upang pag-aralan ang mga dynamic na katangian ng isang bagay.
Ang temperatura ng ACS acceleration curve (Fig. 1.2.) ay nagpapahiwatig ng mga dynamic na katangian ng OR.
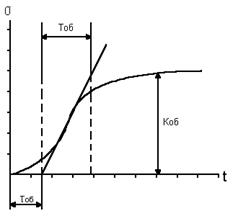
Larawan 1.2. Kurba ng pagpapabilis
Ipinapakita ng figure na ang bagay ay may kakayahang unti-unting ihinto ang paglihis ng halaga ng output mula sa paunang halaga at ang estado ng balanse ay naibalik muli, i.e. ang bagay ay may pag-aari ng self-alignment. Ang ganitong mga bagay ay tinatawag na static.
Ang bagay ay may pagkaantala T tungkol sa, at mula noon Ito ay hindi makabuluhan at mapabayaan sa mga sumusunod.
Ang time constant ng object T about ay ang conditional time kung saan magbabago ang output value mula sa inisyal na value patungo sa isang bagong steady value kung ang pagbabagong ito ay nangyari sa isang pare-pareho at maximum na rate para sa isang naibigay na lumilipas. Ang time constant ay nagpapakilala sa pagkawalang-galaw ng isang bagay, na nauunawaan bilang ang kakayahang mabagal na maipon at kumonsumo ng bagay at enerhiya, na nagiging posible dahil sa pagkakaroon ng mga resistensya at kapasidad sa OR na pumipigil sa kanilang pagpasok at paglabas.
Ang transfer coefficient K tungkol sa OR ay isang pagbabago sa output value ng object sa panahon ng paglipat mula sa inisyal tungo sa bago patungo sa steady state, na tinutukoy sa isang solong perturbation sa input.
Ang isang solong perturbation ay itinuturing na isang porsyentong pagbabago sa input value ng object (displacement of the regulatory body).
Sa ganitong paraan:

saan x o ay ang halaga ng dami ng output sa paunang steady state; X(∞)– masyadong, ngunit para sa isang bagong matatag na estado; ∆Х sa ay ang laki ng ipinakilalang kaguluhan; % stroke ng regulator.
1.3. Pagbuo ng isang functional diagram ng ACS.
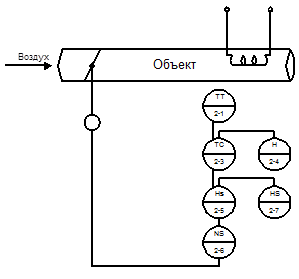
Figure 2. Three-position control loop.
Ang object ng regulasyon ay static sa mga tampok nito na may self-alignment na may pagkaantala sa paglipat, na nag-ambag sa pagpili ng isang proportional-integral na controller.
Kasama sa circuit ang pagsukat ng temperatura ng coolant at paghahambing sa gawain, ang regulator sa pamamagitan ng HS - manual control unit, i-on ang contact na "higit pa" o "mas mababa" contactless starter NS, na kung saan ay kumokontrol sa actuator, i.e. supply ng hangin sa coolant.
Sa regulasyon ng dalawang posisyon, kinokontrol ng elemento ng relay ang pagsasama ng coolant.
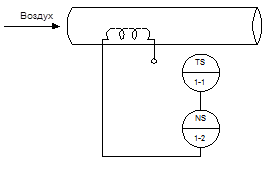
Figure 3. Dalawang-posisyon na control loop.
Kapag naabot ang isang tiyak na temperatura, pinapatay ng starter ang supply ng boltahe sa electric heating element. Ang pagsukat at regulasyon ng temperatura ay isinasagawa ng isang dynamometric sensor - isang temperatura relay.
2. Bahagi ng paninirahan.
2.1. Parametric synthesis at pagsusuri ng single-loop ACS.
Ang pagsusuri ng mga awtomatikong sistema ng kontrol na may mga elemento ng electroautomatics ay isinasagawa gamit ang algebraic na pamantayan ng Gauss at Hurwitz, ang pamantayan ng Lyapunov, ang pamantayan ng dalas ng Mikhailov, Nyquist-Mikhailov, atbp.
Kapag sinusuri ang ACS, ang mga isyu sa katatagan at iba pang mga tagapagpahiwatig ng husay ng bukas at sarado na ACS ay pinag-aaralan, ang mga margin ng katatagan ay matatagpuan sa modulus at phase, ang astatismo ng mga saradong sistema, mga rate ng error para sa mga servo system, atbp.
Ang mga pangunahing tagapagpahiwatig ng husay ng mga system, na tinutukoy pagkatapos mahanap ang tinatawag na h-function, ay kinabibilangan ng mga sumusunod:
1. Ang oras ng lumilipas na proseso t p, pagkatapos nito ang kinokontrol na halaga ay mananatiling malapit sa steady na halaga;
2. Panay na halaga ng kinokontrol na variable h¥=limh(t)=h y ;
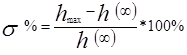
3.Maximum overshoot y=(h max -h y)/h y (dito ang h max ay ang halaga ng unang maximum);
4. Oscillation frequency w=2p/T (dito ang T ay ang oscillation period);
5. Ang bilang ng mga oscillations ng lumilipas na proseso n;
6. Oras upang maabot ang unang maximum na t max ;
Ang isang mahalagang tagapagpahiwatig ng kalidad ng ACS ay ang kanilang pagiging maaasahan. Ang mga tagapagpahiwatig ng husay ay tinutukoy sa pamamagitan ng paglutas differential equation, na naglalarawan sa mga kilalang istruktura ng ACS.
Ang synthesis ng ACS ay binubuo sa paghahanap ng mga istruktura at parameter nito na makakatugon sa mga ibinigay na tagapagpahiwatig ng kalidad. Ang synthesis ay isang mas mahirap na gawain kaysa sa pagsusuri. Ang mga pangunahing pamamaraan na ginamit sa synthesis ng ACS ay analytical, graphic-analytical at machine (sa tulong ng mga computer).
2.1.1. Pagsusuri ng posibilidad ng static na regulasyon.
Kapag pumipili ng controller, kinakailangang malaman ang numerical dynamic na impormasyon tungkol sa object ng regulasyon, i.e. K 0 ; T tungkol sa; t 0 , na tinutukoy namin sa pamamagitan ng katangian ng acceleration.
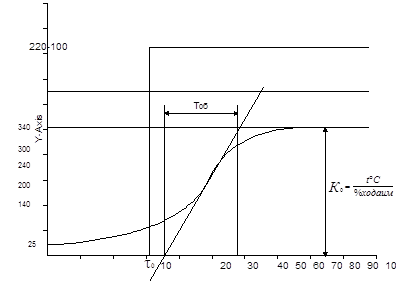
Fig. 4. Acceleration curve ng ACS temperature ng laboratory stand.
Ang uri ng regulator ay pansamantalang pinili kaugnay sa t/T tungkol sa;
Pamantayan para sa pagpili ng mga regulator ayon sa uri ng pagkilos.
Upang pag-aralan at kalkulahin ang structural diagram ng ASR sa pamamagitan ng mga katumbas na pagbabagong-anyo, kinakailangan na bawasan ito sa pinakasimpleng karaniwang anyo ng object-regulator. Ito ay kinakailangan, una, upang matukoy ang mga function ng paglilipat nito, at, dahil dito, ang mga dependency sa matematika na tumutukoy sa mga lumilipas na proseso sa system, at pangalawa, bilang panuntunan, ang lahat ng mga pamamaraan ng engineering para sa pagkalkula at pagtukoy ng mga setting ng mga controllers ay ginagamit para sa tulad ng isang karaniwang mga istraktura.
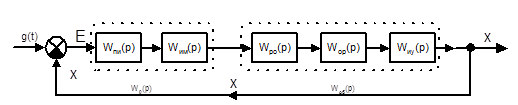
Kaya ang orihinal na block diagram ng temperatura ACS ayon sa isang tipikal na functional diagram (tingnan ang mga guhit) ay maaaring katawanin tulad ng ipinapakita sa figure.
Kung saan ang W P (p), W IM (p), W PO (p), W OP (p), W IU (p), ay ang mga function ng paglilipat ng controller, actuator, regulatory body, control object at measurement device, ayon sa pagkakabanggit .
Sa structural diagram, ang lahat ng mga impluwensya (mga signal) ay dapat ipahiwatig sa Laplace-transformed form.
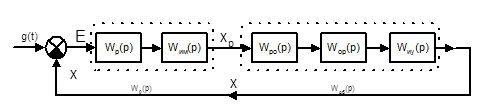
Figure 5. Transformed block diagram ng ACS (t).
Ang lahat ng mga link na tumutukoy sa mga dynamic na katangian ng mga node ng interface (mga koneksyon, mga interconnection) ng isang bagay na may isang controller (halimbawa, mga regulatory body, mga linya ng komunikasyon, mga aparato sa pagsukat, mga sensor, atbp.), Maipapayo, bilang panuntunan, na sumangguni sa layunin ng regulasyon.
Kung ang controller at ang actuator ay direktang nagpapatupad ng control law sa system, pagkatapos ay ang transfer function ng controller
W P (p) \u003d W y (p) W IM (p)
Ang static na regulasyon ay nailalarawan sa pagkakaroon ng isang P-regulator, kung gayon
W P (p) \u003d K reg
Kapag nag-optimize ng mga halaga, ayon sa pang-eksperimentong data, ipinapayong kunin ang K - ang koepisyent ng regulator upang kunin ang K = 10
Ang paglipat ng function ng regulated object, na isinasaalang-alang ang mga link na nauugnay sa object mismo, ay may anyo:
W tungkol sa (p) \u003d W PO (p) W OP (p) W IU (p)
Sa pangkalahatang kaso, ang anumang one-dimensional na ACS na may pangunahing feedback, sa pamamagitan ng unti-unting pagpapalakas ng mga link, ay maaaring bawasan sa pinakasimpleng anyo, ang paglipat ng function ng isang bukas na sistema, na kung saan
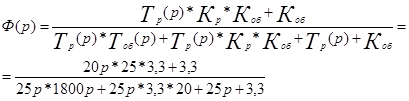
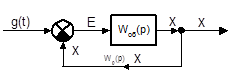 W(p)=W P (p)*W OB (p)
W(p)=W P (p)*W OB (p)
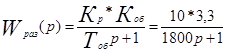
Ang temperatura ng ACS acceleration curve ay nagpapakita na ang bagay ay inertial, static at may pagkaantala, dahil ang pagkaantala ay hindi gaanong mahalaga. Sa karagdagang pananaliksik, maaari silang mapabayaan. Pagkatapos ang paglipat ng function ng bagay ay magiging ganito:
W tungkol sa (p) \u003d K tungkol sa / (T tungkol sa p + 1)
Paglipat ng function ng isang bukas na sistema
W(p)=W P (p)*W OB (p)
 - na may static na regulasyon.
- na may static na regulasyon.
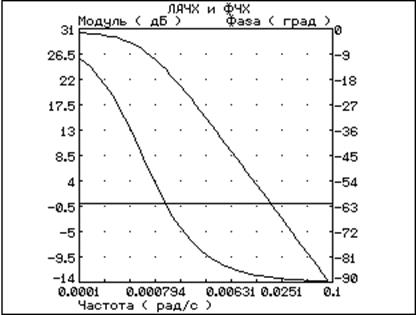
Fig 6. LAFC at LFC para sa bagay.
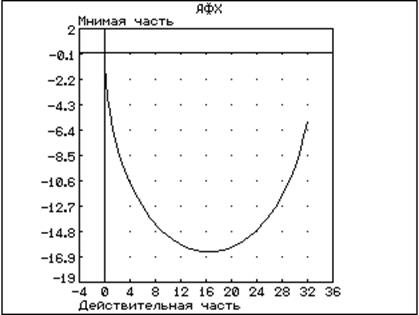
Fig 7. AFC para sa isang bagay.
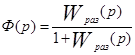
Hanapin natin ang transfer function ng closed system:
kasi ang halaga ng mga constant ng oras ay natutukoy mga tampok ng disenyo mga elemento ng system, pagkatapos ay ang pagsasaayos ng control system ay isinasagawa lamang sa pamamagitan ng pagpapalit ng coefficient nito K sa pamamagitan ng pag-impluwensya sa transfer coefficient K p ng controller.
Upang matukoy ang katatagan ng system, binubuo namin ang amplitude-frequency, mga katangian ng phase-frequency sa isang logarithmic scale at bumuo ng hodograph gamit ang closed system.
![]()
Fig. 8. LAHCH at LPCH na may static na regulasyon.
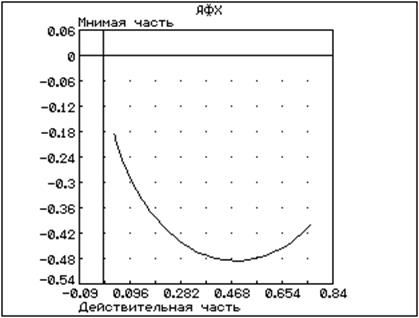
Figure 9. Amplitude-phase na katangian ng isang closed system.
Ayon sa mga graph, nakikita natin na sa koepisyent ng regulator K p = 10, ang margin ng katatagan ay natutupad, dahil sa cutoff frequency wav, ang phase ay mas mababa sa 180°, na nagpapakilala sa katatagan ng system sa ilalim ng static na kontrol, na nangangahulugan na posible na gumamit ng P-controller para sa temperatura ng ACS.
2.1.2. Pagsusuri ng posibilidad ng astatic na regulasyon.
Ang isa sa mga palatandaan ng isang astatic na link (o ang sistema sa kabuuan) ay ang pagkakaroon ng isang kumplikadong variable P bilang isang kadahilanan sa denominator ng transfer function, i.e. ang pagkakaroon ng isang integrating component.
Isaalang-alang natin ang posibilidad ng isang PI-law para sa kontrol ng temperatura ng ACS. Para magawa ito, bubuo kami ng block diagram kung saan isasama namin ang isang PI controller.
Larawan 10. Iskema ng istruktura Temperatura ng SAR.
Ang transfer function ng PI controller ay may form
W P (p)=K+1/T p; (K=20; Tu=25 seg.)
Hanapin natin ang transfer function ng isang open system
W beses (p) \u003d W p (p) W tungkol sa (p)
Hanapin ang transfer function ng isang closed system
Batay sa transfer function ng open system, itinatayo namin ang LFC at LFC, at ang function ng closed system, itinatayo namin ang AFC.
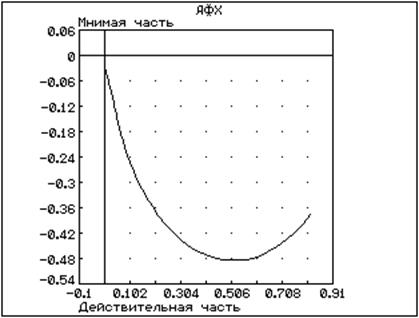
Figure 11. Amplitude-phase na katangian ng isang closed system.
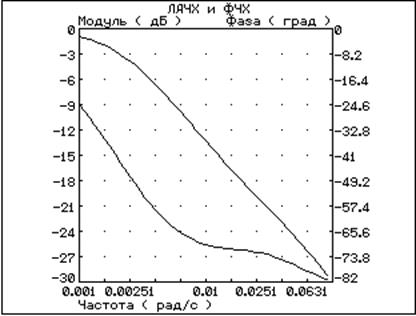
Figure 12. LAFC at LPFC na may astatic na regulasyon.
Ang mga katangian ng dalas ay nagpapakita na ang sistema ay may margin ng katatagan, parehong sa amplitude at sa phase, mula noon sa cutoff frequency w avg phase< 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Pagsisiyasat sa kalidad ng isang single-circuit na awtomatikong control system.
Upang mga awtomatikong sistema ang regulasyon ay nagpapataw ng mga kinakailangan hindi lamang sa pagpapanatili nito. Para sa pagganap ng system, hindi gaanong kinakailangan na ang proseso ng awtomatikong kontrol sa ilang mga tagapagpahiwatig ng kalidad.
Ang mga kinakailangan para sa kalidad ng proseso ng regulasyon sa bawat kaso ay maaaring maging lubhang magkakaibang, gayunpaman, sa lahat ng mga tagapagpahiwatig ng kalidad, ang ilan sa mga pinakamahalaga ay maaaring makilala, na tumutukoy sa kalidad ng halos lahat ng ACP na may sapat na pagkakumpleto.
Ang kalidad ng proseso ng regulasyon ng system, bilang panuntunan, ay sinusuri ng transitional function nito.
Ang mga pangunahing tagapagpahiwatig ng kalidad ay: - oras ng regulasyon t p - ay ang oras kung saan, simula sa sandaling ang epekto sa sistema ay inilapat, ang mga paglihis ng kinokontrol na halaga Dh (t) mula sa steady-state na halaga nito h 0 =h (¥) ay magiging mas mababa kaysa sa paunang itinakda na halaga E Karaniwang ipinapalagay na pagkatapos lumipas ang oras ng regulasyon, ang paglihis ng regulated na halaga mula sa steady-state na halaga ay dapat na hindi hihigit sa E = 5%. Kaya, tinutukoy ng oras ng regulasyon ang tagal (bilis) ng lumilipas na proseso.
Ang overshoot s ay ang maximum deviation Dh max ng kinokontrol na variable mula sa steady value, na ipinapakita bilang isang porsyento ng h 0 =h(¥).
Ang ganap na halaga ng Dh max ay tinutukoy mula sa lumilipas na kurba:
Dh max \u003d h max - h (¥)
Alinsunod dito, ang overshoot ay magiging katumbas ng:
Ang oscillation ng system ay nailalarawan sa bilang ng mga oscillations ng kinokontrol na halaga sa panahon ng regulasyon t p. Kung sa panahong ito ang lumilipas na proseso sa system ay ginagawang mas mababa ang bilang ng mga oscillation kaysa sa tinukoy, kung gayon ito ay itinuturing na ang sistema ay may kinakailangang kalidad ng regulasyon sa mga tuntunin ng oscillation nito;
Steady error E. Ang steady value ng controlled variable h 0 sa dulo ng transient na proseso ay depende sa astaticism n ng system. AT mga static na sistema(n=0) – steady-state na error sa pare-pareho ang halaga ang input action ay hindi katumbas ng 0 at, samakatuwid, ang steady value ng controlled variable h 0 ay mag-iiba mula sa itinakdang halaga nito sa pamamagitan ng value ng steady-state error.
Para sa channel ng nakakagambalang impluwensya, ang halaga ng error ay tinutukoy ng expression
![]()
kung saan ang x 0 ay isang pare-parehong puwersa sa pagmamaneho; K ay ang koepisyent ng paglipat ng system.
Sa pamamagitan ng channel ng perturbing impluwensya, ang halaga ng error ayon sa expression
kung saan ang f 0 ay isang patuloy na nakakagambalang aksyon; K tungkol - ang koepisyent ng paglipat ng regulated object; K p - ang transfer coefficient ng regulator.
Paghahambing ng mga lumilipas na function ng static at astatic na kontrol, pipiliin namin ang pinakamainam na controller para sa temperatura ng ACS.
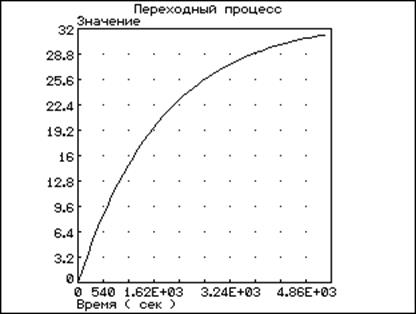
Fig. 13. Lumilipas na pag-andar ng ACS na may P-regulator
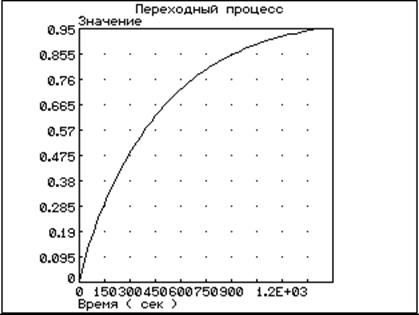
Figure 14. ACS transient function na may PI controller
Ipinapakita ng mga graph na ang oras ng regulasyon sa isang PI controller ay mas maikli kaysa sa isang P controller; nangangahulugan ito na para sa temperatura ng ACS ay nararapat na gumamit ng pulse controller na tumutupad sa batas ng regulasyon ng PI.
Para sa mga kalkulasyon, ginamit ang Classic program sa isang computer.
3. Pagbuo ng isang control loop scheme para sa isang ibinigay na parameter.
Ang mga scheme ay ginawa alinsunod sa GOST 2.710-81.
Figure 15. Three-position control loop.
Ang power supply sa laboratory stand ay isinasagawa ng awtomatikong power supply SF1 scheme No. 003E3. Sa kasong ito, ang heating element ng control object ay nakabukas sa pamamagitan ng pambungad na contact KM 1.1. relay KM 1, at isang pangalawang nagpapahiwatig ng self-recording device KSU 4. Sa 90 ° na posisyon ng universal switch SA1, ang fan motor. Sa posisyon -45°, switch SA1, ay kasama sa positional regulation, sa posisyon +45° - three-position regulation.
Sa 2-posisyong regulasyon, ang KM1 relay winding ay nakabukas sa pamamagitan ng pambungad na contact ng TUDE1 sensor. Kapag nalampasan ang itinakdang temperatura sa sensor, ang contact nito ay bubukas at bubukas ang KM1.1 contact, pinapatay ang heating element, na ipinahiwatig ng HL4 signal lamp.
Ang regulasyon ng tatlong posisyon ay ipinapakita sa diagram No. 004E2. Sa awtomatikong mode, ang de-koryenteng signal mula sa TSMU thermal converter ay sunud-sunod na pinapakain sa input ng KSU4(2) device, terminal 12 at sa pamamagitan ng terminal 11 ay pumapasok sa input 25 ng RBI 1-P control unit.
Ang kasalukuyang signal na proporsyonal sa itinakdang halaga ng temperatura ay ibinibigay din sa RBI 1-P clamp 21 input mula sa RZD setter.
Sa output ng regulator, ang mga terminal 7 at 9 ay nagbibigay ng signal na "Mas" at "Higit pa", ayon sa pagkakabanggit, na nauugnay sa gitnang punto ng clamp 10. Ang signal ay dumadaan sa BRU at sinira ang mga contact SQ1 at SQ2 ng IM actuator , na kumokontrol sa FBR starter, mga terminal 7 at 9. Ino-on ng FBR ang mga contact sa IM 1, 2 at 3.
Sa manual control mode, ang IM ay ipinapasa sa pamamagitan ng BRU buttons na "Higit pa" o "Mas kaunti".
Konklusyon
Para sa kinakalkula na sistema ng bagay, ang mga sumusunod na kalkulasyon ay ginawa:
Pag-unlad ng isang functional diagram ng awtomatikong kontrol. Ang transfer function at structural transformation ng control object scheme ay nakuha. Ang mga katangian ng dalas ng control object ay itinayo. Ang isang pagtatasa ng mga kakayahan ng isang static control object (P-controller), pati na rin ang isang pagtatasa ng posibilidad ng isang astatic control object (PI-controller) ay ginawa. Isang pag-aaral ang ginawa sa kalidad ng isang single-loop na awtomatikong control system.
Ang pagtatayo ng nais na mga katangian ng dalas ng naitama na sistema ay nakumpleto na. Ang pagpili at pagkalkula ng corrective device ay isinasagawa. Nasuri ang kalidad ng inayos na sistema.
Ang pagbuo ng isang control loop circuit na may ibinigay na parameter ay nakumpleto na.
Batay sa mga kalkulasyon, maaari nating sabihin na ang pagpili ng corrective device ay ginawa nang tama at nakakatugon sa mga tagapagpahiwatig ng kalidad ng system na may ginawang pagwawasto.
Bibliograpiya.
- I.Yu. Topchev "Atlas para sa CAP Design"
- B.C. Chistyakov "Isang Maikling Gabay sa Mga Pagsukat ng Thermal Engineering"
- N.N. Ivashchenko "Awtomatikong regulasyon"
4. V.V. Cherenkov "Mga aparatong pang-industriya at paraan ng automation"
Pinapayuhan ka naming basahin
, diagnosis, paggamot Paggamot ng urogenital chlamydia") Urogenital chlamydia - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia
Urogenital chlamydia - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano Upang maghintay o hindi maghintay para sa isang tao mula sa hukbo Para sa anong dahilan maaari silang italaga mula sa hukbo
Upang maghintay o hindi maghintay para sa isang tao mula sa hukbo Para sa anong dahilan maaari silang italaga mula sa hukbo Inihurnong mansanas na may cottage cheese Mga inihurnong mansanas na may cottage cheese
Inihurnong mansanas na may cottage cheese Mga inihurnong mansanas na may cottage cheese

