Clasificarea sistemului reglare automată
Sisteme de control automat utilizate în tehnologie moderna, sunt destul de variate. Expansiune rapida scop functional Scopul funcțional al sistemelor automate, care a devenit posibil, în special, datorită introducerii tehnologiei informatice, crește numărul de clase de sisteme realizate. În aceste condiții, este aproape imposibil să se ofere o clasificare completă detaliată a sistemelor de control automat. Clasificările care au fost aplicate cu succes în trecutul recent devin acum prea restrânse, neacoperind sisteme noi dezvoltate și implementate.
Orice clasificare se bazează pe anumite caracteristici de clasificare. Din punctul de vedere al generalității clasificării sistemelor de control automat, cea mai convenabilă caracteristică de clasificare este informația utilizată despre obiectul reglementării. Trebuie remarcat faptul că aproape toate sistemele automate sunt dispozitive neliniare care conțin atât variabile, cât și parametri distribuiți, în care valoarea variabilelor la un moment dat poate depinde nu numai de curentul, ci și de valorile trecute ale acestora. variabile.
Fiecare sistem automat este caracterizat de un algoritm de funcționare - un set de prescripții care determină natura modificării variabilei controlate în funcție de impact
În funcție de natura modificării componentelor influenței de conducere, sistemele automate sunt împărțite în patru clase:
- sisteme automate de stabilizare, în care se află acțiunea principală valoare constantă, iar valoarea controlată este menținută automat neschimbată cu o modificare arbitrară a sarcinii și a condițiilor externe. Sarcina obiectului reglat (cuplul de sarcină pe arborele motorului, sarcina generatorului) în sistemele de stabilizare este de obicei principalul efect perturbator care afectează cel mai puternic valoarea controlată;
- sisteme de reglare programată, în care forța motrice și valoarea reglată se modifică după o lege prestabilită. Un sistem automat software poate fi considerat ca un sistem de stabilizare, în care sarcina de stabilizare este complicată de sarcina de a schimba variabila controlată conform unui program dat. Modificarea valorii controlate conform programului se realizează prin adăugarea în sistem a unui element al unui dispozitiv software care modifică în timp acţiunea de setare conform unei legi prestabilite;
- sistemele servo implică schimbarea variabilei controlate în conformitate cu modificarea forței motrice, a cărei lege de modificare este o funcție necunoscută. Astfel, sistemul servo, ca și sistemul software, reproduce acțiunea principală. Totuși, acest efect în sistemul de urmărire nu se modifică conform unui program prestabilit, ci în mod arbitrar. De exemplu, antena radar se întoarce pentru a urmări aeronava, a cărei traiectorie nu este cunoscută în prealabil, adică „o urmărește”. De aici provine sistemul de urmărire a numelor. Influența principală și valorile controlate ale servosistemelor pot avea un caracter divers în natura lor fizică. Mai mult, valoarea controlată prin natura sa fizică poate diferi de acțiunea de setare.
-
sistemele de control optim asigură menținerea optimă a valorii reglate în funcție de unul sau altul criteriu de optimitate
În funcție de modelul matematic care descrie procesele din sistemele automate, acestea sunt împărțite în:
- sisteme automate liniare, al căror model matematic este compus din ecuaţii diferenţiale liniare sau linearizate. Dacă în ecuația de dinamică a oricărei legături a unui sistem automat liniar există cel puțin unul sau mai mulți coeficienți variabili în timp, atunci se obține un sistem automat liniar cu parametri variabili. Dacă orice legătură este descrisă prin ecuații diferențiale parțiale liniare, atunci sistemul automat va fi un sistem automat liniar cu parametri distribuiți. În schimb, un sistem automat liniar obișnuit este un sistem automat cu parametrii concentrați. Dacă este descrisă dinamica oricărei legături din sistemul automat ecuație liniară cu un argument întârziat, atunci sistemul automat se numește sistem automat liniar cu întârziere;
- sisteme automate neliniare, al căror model matematic este compus din neliniare ecuatii diferentiale. Sistemele automate neliniare includ toate sistemele automate, în legăturile cărora există caracteristici statice ale oricăruia dintre numeroasele tipuri de neliniaritate. Neliniare pot fi sisteme automate cu parametri variabili, cu parametri distribuiți, cu întârziere, impuls și sisteme automate digitale, dacă liniaritatea ecuației dinamicii este încălcată undeva în ele.
Clasificarea sistemelor de control automat
Fiecare sistem automat constă dintr-un număr de legături, interconectate într-un mod corespunzător. Fiecare legătură individuală are o intrare și o ieșire care determină impactul și transferul de informații de la o legătură la alta. LA caz general orice legătură poate avea mai multe intrări și ieșiri. Mărimile de intrare și de ieșire pot fi de orice natură fizică.
În timpul funcționării sistemului automat, valorile de intrare și de ieșire se modifică în timp. Dinamica procesului de conversie a semnalului în această legătură este descrisă de o ecuație care leagă variabila de ieșire cu variabila de intrare. Setul de ecuații și caracteristici ale tuturor legăturilor descrie dinamica proceselor de control sau reglare în întregul sistem în ansamblu.
Principalele caracteristici ale împărțirii sistemelor automate în clase mari în funcție de natura proceselor dinamice interne sunt următoarele:
- continuitatea sau discretitatea proceselor dinamice în timp;
- liniaritatea sau neliniaritatea ecuaţiilor care descriu dinamica proceselor de control.
În funcție de natura modificării semnalelor de control, sistemele automate sunt împărțite în trei clase:
- sisteme continue (analogice), care sunt descrise prin ecuații diferențiale obișnuite și în procesul de reglare structura tuturor conexiunilor din sistem rămâne neschimbată. Semnalele la ieșirea legăturilor individuale ale unui astfel de sistem sunt funcții continue de influențe și timp. Există o conexiune funcțională continuă între legăturile la intrarea și la ieșirea sistemului automat. În acest caz, legea modificării în timp a valorii de ieșire poate fi arbitrară, în funcție de forma modificării valorii de intrare și de forma ecuației dinamicii legăturii. Pentru ca sistemul automat în ansamblu să fie continuu, este necesar, în primul rând, ca caracteristicile statice ale tuturor legăturilor să fie continue;
- sisteme discrete (digitale), care sunt descrise prin ecuatii diferentiale si in ele, la intervale de timp discrete, circuitul actiunii de control este deschis sau inchis. În sistemele discrete, deschiderea circuitului de acțiune este efectuată forțat și periodic prin dispozitive speciale de întrerupere. Astfel de sisteme conțin elemente de impuls și realizează cuantificarea semnalului atât din punct de vedere al nivelului, cât și al timpului. O legătură care convertește un semnal de intrare continuu într-o secvență de impulsuri se numește o legătură de impulsuri. Dacă legătura ulterioară a sistemului automat este, de asemenea, discretă, atunci pentru aceasta nu numai ieșirea, ci și valoarea de intrare vor fi discrete. Sistemele automate discrete includ sisteme automate de control al impulsurilor, precum și sisteme automate pentru calculatoare de control. Acestea din urmă dau rezultatul calculului la ieșire discret, la anumite intervale, sub formă de numere pentru valori numerice individuale discrete ale cantității de ieșire;
- sisteme relee (discrete-continue), care sunt descrise prin ambele tipuri de ecuații. În aceste sisteme, deschiderea sau închiderea circuitului de acțiune este efectuată de una dintre legăturile sistemului cu o valoare continuă a acțiunii de intrare. Deschiderea sau închiderea se realizează folosind un releu sau o legătură cu o caracteristică de releu. Releul este declanșat la anumite valori de influență asupra organului său senzitiv. Sistemele de relee realizează cuantificarea semnalelor în timp. Caracteristica statică a legăturii releului are puncte de întrerupere.
Fiecare dintre aceste trei clase de sisteme automate este împărțită în subclase:
- sisteme automate staţionare cu parametrii concentraţi sau distribuiţi;
- sisteme automate nestaționare cu parametrii concentrați sau distribuiți.
În studiul, calculul și sinteza sistemelor automate, trebuie avut în vedere că teoria și diferitele metode aplicate pentru sistemele automate liniare obișnuite au fost cel mai pe deplin dezvoltate. Prin urmare, în interesul simplității calculului, este întotdeauna de dorit să se reducă problema la o astfel de formă încât să se utilizeze la maximum metodele de studiu a sistemelor automate liniare obișnuite. De obicei, ecuațiile de dinamică ale tuturor legăturilor unui sistem automat se încearcă să fie reduse la cele liniare obișnuite și numai pentru unele legături, unde acest lucru este inacceptabil sau unde este introdusă special o legătură liniară sau neliniară specială, aceste proprietăți speciale. sunt luate în considerare.
Cu toate acestea, acest lucru nu înseamnă deloc că atunci când proiectați noi sisteme automate, ar trebui să depuneți eforturi pentru sisteme automate liniare obișnuite. Dimpotrivă, este destul de evident că sistemele automate liniare obișnuite au capacități limitate. Introducerea de legături speciale liniare și neliniare poate da sistemul automat cele mai bune calități. Sistemele automate cu neliniarități special introduse și sistemele automate discrete, inclusiv cele cu calculatoare de control și sisteme automate bazate pe microprocesoare, au posibilități deosebit de bogate.
În funcție de tipul și numărul de semnale, sistemele de control automat sunt împărțite în:
- sisteme cu un singur circuit în care există o singură valoare reglabilă;
- sisteme multi-circuit în care există mai multe feedback-uri principale sau locale;
- sistemele de reglare incoerentă sunt destinate reglarii unor cantități variate, nu sunt legate între ele și pot interacționa doar printr-un obiect comun de reglare.
a) în sistemele dependente de control incoerent, o modificare a uneia dintre variabilele controlate afectează modificarea altora. Prin urmare, în astfel de sisteme, procesele de reglementare nu pot fi considerate izolat unele de altele;
b) în sistemele independente de control incoerent, modificarea uneia dintre valorile controlate nu depinde de modificarea celorlalte;
- sistemele de reglare conectată presupun prezența mai multor regulatoare, ale căror valori reglementate au legături reciproce între ele, realizate în plus față de obiectul reglementării.
În funcție de prezența sau absența unei erori de reglare, ATS se împart în:
- sistemele statice sunt astfel de sisteme care presupun prezența unei erori constante de control (droop). trăsătură caracteristică muncă sistem static este că echilibrul sistemului poate fi atins când valori diferite cantitate reglementată și fiecare valoare a cantității reglementate corespunde unei singure valori a organismului de reglementare;
- sistemele astatice sunt astfel de sisteme care, pentru diferite valori de influență externă asupra obiectului, nu există nicio abatere a valorii controlate de la valoarea cerută. În astfel de sisteme, starea de echilibru are loc cu o singură valoare a variabilei controlate egală cu cea dată, iar organismul de reglare trebuie să poată ocupa diferite poziții cu aceeași valoare a variabilei controlate.
Principiile controlului automat
Principiul de funcționare al oricărui sistem de control automat este de a detecta abaterile valorilor controlate care caracterizează funcționarea obiectului reglementat sau fluxul procesului din modul cerut și, în același timp, acționează asupra obiectului sau procesului reglementat. în aşa fel încât să se elimine aceste abateri.
În procesul de management, există întotdeauna mărimi fizice care trebuie schimbate într-un mod strict definit.
Sistemele de control automat ar trebui, pe baza măsurării valorilor reglementate, să formeze acțiuni de control asupra obiectului reglementat. Modificarea comportamentului obiectului reglat poate fi efectuată conform principiilor ciclurilor deschise sau închise.
Într-un sistem automat deschis acţiunea de control se formează pe baza valorii valorii specificate. În astfel de sisteme, nu există nicio legătură între intrare și ieșire. Ca urmare, fluxul procesului de control în sistemele deschise nu depinde de rezultate, adică de modul în care sistemul își îndeplinește funcțiile. Într-un sistem automat deschis are loc doar acțiune directă: de la operator la obiectul reglementat, de la intrare la ieșire. Cel mai simplu exemplu- procesul de aprindere a iluminatului electric în încăpere.
Pentru ca valoarea reglată y(t) a obiectului reglementat să ia valoarea necesară, la intrarea acestuia i se aplică o acțiune de intrare x(t). Cu toate acestea, în practică, valoarea controlată y(t) a obiectului reglementat se abate de la valoarea necesară din mai multe motive. Unul dintre aceste motive este influența diferitelor tipuri de influențe externe perturbatoare f(t) asupra obiectului reglementării. Un alt motiv este influența modificării parametrilor obiectului reglat sau a altor elemente ale sistemului, adică influența perturbațiilor parametrice (factori de câștig, constante de timp etc.). Al treilea motiv care provoacă abaterea variabilei controlate se datorează modificării valorii cerute a variabilei controlate (modificarea temperaturii necesare a cuptorului de întărire, modificarea arbitrară a coordonatelor unghiulare ale țintei). Dacă valoarea necesară a variabilei reglate se modifică, atunci pentru o modificare corespunzătoare a valorii sale reale, este necesară modificarea acțiunii de control h(t) la intrarea obiectului reglat. Când acțiunea de control se modifică la intrarea obiectului de control, care are inerție, are loc un proces tranzitoriu, în timpul căruia valoarea controlată nu va corespunde cu valoarea cerută.
Abaterea valorii controlate de la valoarea dorită poate apărea nu numai în regim tranzitoriu, ci și în modul dinamic constant, atunci când valoarea necesară se modifică, de exemplu, la o viteză constantă sau o accelerație constantă. Abaterea valorii controlate sub influența motivelor enumerate poate ajunge la valori inacceptabil de mari, la care procesul tehnic furnizat de obiect este încălcat. Prin urmare, se pune problema reducerii abaterilor valorilor de ieșire ale obiectelor de la valorile necesare. Această sarcină este sarcina principală a managementului (reglementării).
Este evident că necesitatea unei acțiuni de control apare în acele cazuri când procesul din obiectul reglementării se abate de la prescripțiile date de algoritmul de funcționare.
Algoritmul de control în astfel de sisteme automate este determinat de proprietățile legăturilor individuale sau de natura semnalelor de intrare. Multe sisteme automate funcționează pe principiul controlului în buclă deschisă, care au un algoritm de acțiuni predeterminat. De exemplu, pornirea unui motor cu ardere internă, pornirea unui compresor pe o locomotivă, alimentarea cu nisip sub seturi de roți, procesul de încărcare a bateriei etc. Pentru funcționarea normală a unor astfel de sisteme automate trebuie respectate o serie de măsuri.
În acest sistem, acțiunea de control poate fi generată de o persoană. Comparând valorile reale și cerute ale variabilei controlate, o persoană poate identifica abaterea dintre ele și, în conformitate cu mărimea și semnul acestei abateri, se determină amploarea acțiunii de control.
În primul rând, corespondența completă între valorile setate și reale ale variabilei controlate poate avea loc numai dacă caracteristicile legăturilor individuale ale sistemului automat sunt stabile și este exclusă influența perturbațiilor externe.
În al doilea rând, acestea trebuie reglate cu atenție, adică fiecare poziție a dispozitivului de conducere trebuie să corespundă strict cu valoarea variabilei controlate. Cu toate acestea, salvând setările atunci când piesele sunt uzate sau elementele îmbătrânesc, precum și când temperatura se schimbă mediu inconjurator prezintă o sarcină dificilă. Prin urmare, sistemele cu buclă deschisă nu pot oferi o precizie ridicată de control. Nu măsoară rezultatul cauzat de acțiunea de control și nu întreprind acțiuni care influențează acest rezultat astfel încât să corespundă celui dorit.
În sistemele automate închise, valoarea controlată este comparată cu valoarea sa setată și se formează o acțiune de control pe baza semnalului de eroare. Progresul procesului de control automat depinde de rezultatele acestei comparații.
Pentru a implementa un astfel de algoritm de control, în proiectarea sistemului automat se introduce o conexiune, care se numește feedback, deoarece transmite un semnal de la ieșirea obiectului reglat la intrarea sistemului automat în direcția opusă direcției. de transmitere a acţiunii de control către obiectul reglementat.
Cel mai simplu mod este să plantezi un operator uman care va juca rolul de feedback, de exemplu, în procesul de control manual vehicul fie că este o mașină, un tractor, o locomotivă, un avion sau o navă spațială. În acest caz, compararea citirilor dispozitive de control, măsurând valoarea reală a variabilei controlate (viteză, putere, tracțiune, altitudine de zbor etc.), cu valoarea ei dată, operatorul uman efectuează un impact suplimentar asupra obiectului controlat pentru a realiza abaterea minimă a variabilei controlate. din valoarea setată.
|

Pe de o parte, acțiunile unui operator uman sunt simple elementare, iar pe de altă parte, monitorizarea unei multitudini de dispozitive este destul de obositoare și poate fi realizată cu ușurință de un dispozitiv automat special care compară valoarea de referință și valoarea reală a controlului. variabilă şi, pe baza ei, formează o acţiune de control asupra obiectului reglementat. Astfel, au apărut primele regulatoare automate, menite să înlocuiască munca monotonă și ineficientă a unei persoane cu dispozitiv automat. Un astfel de dispozitiv este regulator automat.
Obiectul de reglare și regulatorul automat formează un sistem închis.
În sistemele automate închise, acțiunile unui operator uman sunt reduse la setarea inițială a unui mod dat și monitorizarea generală a proceselor din sistemul automat. Precizia reglării în sistemele automate închise, adică acuratețea menținerii relației funcționale necesare între intrare și ieșire, depinde în principal de acuratețea cu care este comparată valoarea necesară și reală a variabilei controlate.
Sistemele de control automat în buclă închisă diferă prin principiul reglementării:
- prin abatere;
- din indignare;
- combinate.
Sisteme de control automat bazate pe principiul abaterii, sunt principalele în practica de automatizare a diverselor unități de producție. Ele sunt caracterizate prin prezența feedback-ului, care furnizează o parte din semnalul de ieșire la intrarea sistemului automat și formează o buclă de control închisă. Esența acestui principiu de control este că valoarea reală a variabilei controlate este în mod constant comparată cu valoarea acesteia. h valoare dată. Dacă există o diferență între aceste valori peste un prag prestabilit, sistemul dezvoltă o acțiune de reglementare menită să elimine această diferență sau să o reducă la o anumită valoare acceptabilă.
|

Valoarea cerută a valorii reglate a sistemului automat y(t) este determinată de forța de antrenare x(t) provenită de la dispozitivul de antrenare. Abaterea valorii controlate y(t) de la valoarea specificată poate fi cauzată atât de influența diferitelor tipuri de influențe perturbatoare, cât și de o modificare a acțiunii de setare x(t). Pentru a reduce sau elimina această abatere, este necesar să se dezvolte o acțiune de control adecvată h(t) și să o aplice la intrarea obiectului de control. Acțiunea de control la utilizarea principiului controlului abaterii este generată ca urmare a conversiei abaterii Dx(t) a variabilei controlate de la valoarea setată.
În sistemele automate care funcționează pe principiul abaterii, acțiunea de control h(t) se obține ca urmare a transformării semnalului de abatere, și nu factorul în sine care a provocat abaterea, de exemplu, acțiunea perturbatoare f(t) (adică, ca urmare a transformării consecinței, și nu a cauzei în sine), deci nu poate avea un efect invers asupra obiectului fără întârziere față de efectul perturbator. În consecință, principiul controlului abaterii nu face posibilă eliminarea completă a abaterii, adică obținerea invarianței absolute.
În sistemele automate care funcționează pe principiul abaterii, acțiunea de control se obține ca urmare a transformării abaterii, care poate fi cauzată de diverși factori. Prin urmare, în aceste sisteme, abaterea scade, indiferent de care dintre factorii este cauzată. Întrucât în sistemele automate care funcționează pe principiul abaterii, abaterile care apar atunci când parametrii elementelor sistemului automat scad și ele, atunci sistemele automate închise vor fi mai puțin sensibile la modificările parametrilor elementelor sale în comparație cu sistemele automate deschise. , unde abaterile cauzate de modificările parametrilor elementelor acestora, nu sunt compensate.
Sistemele automate care funcționează după acest principiu au o mare precizie de menținere a valorii controlate (datorită prezenței controlului constant al diferenței dintre valorile setate și cele reale), dar viteză redusă.
Performanța scăzută a unor astfel de sisteme se datorează faptului că
1. Bucla închisă de control automat, creată de regulatorul automat și feedback, include obiectul de reglare. În practică, obiectul reglementării este aproape întotdeauna veriga cea mai inerțială din sistemul automat;
2. Ele nu reacționează la cauza care provoacă nepotrivirea dintre valoarea de referință și valoarea reală a variabilei controlate, ci la consecința - nepotrivirea dintre valoarea de referință și valoarea reală a variabilei controlate.
Pentru a construi un sistem de control automat care funcționează pe principiul abaterii, cu toate celelalte lucruri, este necesară o cantitate minimă de informații inițiale despre obiectul reglementării. Aproape toate informațiile despre obiectul reglementării sunt transmise prin feedback. Prezența feedback-ului se caracterizează prin faptul că aplicarea unei anumite influențe asupra sistemului automat presupune o contraacțiune care restabilește starea întregului sistem automat.
În cel mai simplu caz, controlerul automat compară semnalul de ieșire al sistemului automat cu semnalul de referință pentru a afla cât de corect își îndeplinește sistemul automat sarcina. Prezența feedback-ului într-un sistem automat îi modifică caracteristicile statice și dinamice. Datorită feedback-ului, un sistem automat poate fi mai precis și mai rapid, sau invers, mai lent. Poate face sistemul automat stabil sau instabil.
Sistemele care funcționează pe principiul abaterii au următoarele avantaje:
1) reducerea abaterii variabilei controlate de la valoarea cerută, indiferent de ce factori (influențe perturbatoare externe, modificări ale parametrilor elementelor sistemului, modificări ale acțiunii de setare) au cauzat-o;
2) sunt mai puțin sensibili la modificările parametrilor elementelor sistemului, în comparație cu sistemele deschise.
Sistemele care funcționează pe principiul abaterii au următoarele dezavantaje:
1) în sistemele simple cu o singură buclă cu principiul controlului prin abatere nu se poate realiza invarianța absolută;
2) în sistemele cu principiul reglării prin abatere, ca și în sistemele închise, se pune problema stabilității.
Datorită avantajelor semnificative ale sistemului cu principiul de reglare prin abatere, acestea sunt utilizate pe scară largă în tehnologie.
Sisteme de control automate care funcționează pe principiul compensării perturbațiilor, sunt concepute pentru a reduce influența influențelor perturbatoare asupra obiectului reglementat prin măsurarea acestor influențe și compensarea influenței lor din cauza impactului artificial invers asupra obiectului reglementat.
La elaborarea acestui principiu, inginerii au pornit de la presupunerea că, pentru a reduce sau elimina abaterea valorii controlate de la valoarea setată cauzată de influența unuia sau altuia dintre factori, este necesar ca acțiunea de control să fie o anumită funcție a acestuia. factorul și caracteristicile obiectului reglementat.
La reglarea conform principiului compensarii perturbatiei, problema este de a compensa influenta perturbatiei asupra valorii controlate.
Informațiile de lucru din aceste sisteme sunt influențe perturbatoare, influenta negativa care sunt supuse despăgubirii. Prin urmare, în aceste sisteme, este posibil să se compenseze pe deplin influența acțiunii perturbatoare asupra variabilei controlate, adică este posibil să se obțină invarianța (independența) mărimii controlate în raport cu această acțiune perturbatoare. Metoda luată în considerare poate compensa influența fiecăreia dintre influențele perturbatoare separat. Cu toate acestea, în practică, de obicei nu este posibil să se compenseze influența tuturor influențelor perturbatoare, deoarece o parte semnificativă a influențelor nu poate fi măsurată, iar atunci când se încearcă compensarea tuturor influențelor perturbatoare posibile, se obține un sistem extrem de complex.
Astfel de sisteme automate necesită informații inițiale și mai complete decât sistemele automate care funcționează pe principiul abaterii. Într-adevăr, pentru a compensa influența oricărei perturbații în stare staționară, și cu atât mai mult în condiții tranzitorii, este necesar să se cunoască exact această influență.
În acest caz, se selectează una (principală) sau două (nu mai multe) perturbații și se determină modul în care acestea afectează variabila controlată. Acţiunea de control aplicată obiectului reglementării de către organul executiv depinde de perturbare astfel încât modificările valorii controlate să nu depăşească limitele specificate. Astfel de sisteme sunt simple și stabile în funcționare, dar nu sunt capabile să răspundă la alte perturbații care provoacă o abatere a variabilei controlate.
|

Principiul compensarii perturbatiei este ca pentru a reduce sau elimina abaterea Dx(t) a variabilei controlate de la valoarea stabilita cauzata de actiunea perturbatoare f(t), se masoara acest efect si, ca urmare a transformarii sale, se generează acțiunea de control h(t) care, aplicată la intrarea obiectului reglat, determină o abatere compensatoare a valorii controlate y(t) a semnului opus față de abaterea cauzată de influența perturbatoare f(t). ). Perturbația f(t) este măsurată folosind un compensator de perturbație. Unele sisteme automate includ în mod explicit actuatoare și comenzi.
Semnalul asupra perturbației хв(t) din sumator se adaugă (scăde) cu acțiunea principală, care determină valoarea necesară a variabilei controlate. Efectul total Dx(t) cu ajutorul unui controler automat (pentru acest principiu de control, în majoritatea cazurilor, controlerul automat este un amplificator de putere) este amplificat la valoarea necesară pentru a obține modul de funcționare necesar al obiectului reglementat . Acțiunea de control h(t) astfel formată intră în intrarea obiectului reglementat și compensează influența acțiunii perturbatoare.
Un sistem automat care funcționează pe principiul compensării perturbațiilor este un sistem automat în buclă deschisă. În acesta, procesul de reglare nu depinde de rezultatele funcționării sistemului automat (valoarea controlată nu este măsurată și nu se întreprinde nicio acțiune dacă nu corespunde valorii cerute) și se observă doar un efect direct.
Un sistem automat care funcționează după acest principiu are o viteză mare, dar o precizie scăzută în menținerea valorii controlate. Viteza mare este asigurată de faptul că regulatorul automat reacţionează nu la efectul influenţei influenţei perturbatoare (abaterea variabilei controlate), ci la cauza - modificarea acţiunii perturbatoare, pregătirea obiectului de control în prealabil pentru o posibilă abatere a variabilei controlate.
Sistemele automate care funcționează pe principiul compensării perturbațiilor au următoarele avantaje:
1) vă permit să compensați pe deplin principalele influențe perturbatoare, adică în aceste sisteme este posibil să obțineți invarianța variabilei controlate în raport cu influențele perturbatoare;
2) în ele, ca în orice sistem deschis, nu există nicio problemă de stabilitate.
Sistemele automate care funcționează pe principiul compensării perturbațiilor prezintă următoarele dezavantaje:
1) elimină influența doar a principalelor influențe perturbatoare, pentru care se creează canale de compensare;
2) există o abatere a valorii controlate de la valoarea cerută ca urmare a unei modificări a influențelor perturbatoare secundare, pentru care nu există canale de compensare;
3) în aceste sisteme, ca și în sistemele deschise, apar abateri ale valorii controlate cu modificarea caracteristicilor obiectului și elementelor sistemului automat;
4) aplicarea principiului controlului perturbaţiilor se limitează la obiectele ale căror caracteristici sunt cunoscute sau pot fi determinate.
Sistemele care funcționează pe principiul compensării perturbațiilor au aplicații speciale.
Sisteme de control automate care funcționează pe principiul combinat, combina principiul compensarii perturbatiei si principiul deformarii. Astfel de sisteme automate combină aspectele pozitive ale principiilor de control automat discutate anterior și elimină deficiențele acestora.
|
În astfel de sisteme, pe lângă bucla principală de control a abaterii închisă, sistemul automat combinat conține o buclă de compensare pentru una sau mai multe perturbații. Cantitatea de informații de lucru în sistemul automat combinat este mai mare decât în sistemele anterioare. Aici se adaugă informații despre influența perturbatoare la informațiile de funcționare despre abaterea variabilei controlate.
În sistemele automate combinate, principiul reglării prin abatere este implementat cu ajutorul feedback-ului principal, iar principiul controlului prin perturbare cu ajutorul legăturilor de compensare. Dacă eroarea cea mai semnificativă este cauzată de acțiunea perturbatoare f(t), atunci se introduce o conexiune pentru această perturbare, dar dacă o astfel de eroare se obține datorită unei modificări a acțiunii de setare x(t), atunci conexiunea pentru acțiunea de setare este determinată de algoritmul de control automat.
În sistemele automate combinate, conexiunea de compensare pentru perturbarea principală (acțiunea de antrenare) elimină componenta erorii cauzate de această perturbare (modificarea influenței de antrenare), iar ca urmare a acțiunii de feedback, erorile cauzate de influențele perturbatoare secundare, pentru care nu există conexiuni de compensare, sunt reduse. Dacă cu ajutorul legăturilor compensatorii erorile cauzate de principalele influențe perturbatoare (setare) nu sunt complet eliminate, atunci erorile reziduale sunt reduse și cu ajutorul feedback-ului.
Pentru a forma o acțiune de control în sistemele automate combinate, se folosesc atât informații directe despre principalele influențe perturbatoare (modificarea acțiunii master), cât și abaterea variabilei controlate de la valoarea cerută cauzată de toate influențele perturbatoare (modificarea acțiunii master) . Astfel:
1) în sistemele automate combinate, cu ajutorul legăturilor compensatorii, este posibil să se realizeze compensarea completă a erorilor cauzate de principalele influențe perturbatoare și principale (se poate realiza invarianță);
2) alături de posibilitatea compensării integrale a erorilor cauzate de principalele influențe, în sistemele automate combinate, cu ajutorul feedback-ului, erorile cauzate de influențele perturbatoare secundare, pentru care nu există conexiuni de compensare, precum și erorile subcompensate din influențele principale, sunt reduse;
3) dacă sunt încălcate condițiile de compensare a acțiunii perturbatoare, eroarea rezultată este redusă printr-un sistem automat închis, adică sistemele automate combinate sunt mai puțin sensibile la modificările parametrilor canalelor deschise decât sistemele automate deschise;
4) din cauza prezenței canalelor de compensare deschise în sistemele automate combinate, problema stabilității nu este la fel de acută ca în sistemele automate închise.
Desigur, acuratețea reglării, care poate fi realizată în sistemele combinate, este mai mare decât acuratețea tuturor celorlalte sisteme automate. În practică, astfel de sisteme automate sunt complexe și costisitoare.
Astfel, sistemele automate combinate sunt cele mai avansate sisteme cu precizie ridicată în menținerea valorii controlate. Pe principiile luate în considerare, se construiesc nu numai sisteme tehnice de control automat, ci și sisteme de control în societate și sisteme de reglementare în organismele vii. Prin urmare, metode de cercetare sisteme tehnice reglarea automată într-o anumită măsură poate fi utilizată pentru a studia sistemele de control în societate și fauna sălbatică.
Introducere 5
Elaborarea unei scheme funcționale a unui sistem de control automat (ACS) 6
Dezvoltarea ecuațiilor diferențiale și a funcțiilor de transfer ale elementelor sistemului. 7
Dezvoltare diagramă bloc SAR 11
Transformarea schemei structurale a ACS la forma canonică 12
Analiza stabilității ACS după criterii algebrice 13
Calculul și construcția proceselor tranzitorii de-a lungul canalelor de influențe reglatoare și perturbatoare. cincisprezece
Evaluarea tranzitorie a calității 17
Aplicația grafică 19
Referințe 22
Introducere
În proiectarea funcțională a sistemelor de control automat, cele mai des sunt utilizate metode ale teoriei controlului automat. Sistemul automat este format dintr-un număr de dispozitive tehnice cu anumite proprietăți funcționale și dinamice. Pentru descrierea și studiul lor, un sistem automat este reprezentat de un anumit set de elemente dotate cu proprietățile corespunzătoare.
Obiectele tehnice reale sunt descrise prin ecuații diferențiale și algebrice neliniare. Dar, deoarece în stadiul inițial de proiectare, sarcinile de evaluare preliminară a soluțiilor tehnice și de prognoză sunt rezolvate, modelele matematice relativ simple pot fi utilizate destul de rezonabil în aceste scopuri. În acest sens, ecuațiile neliniare ale modelului matematic sunt supuse liniarizării.
Descrierea sistemelor automate este mult simplificată prin utilizarea metodelor de calcul operațional. Folosind transformata Laplace, ecuația diferențială liniară este redusă la ecuație algebrică cu variabile complexe.
Dezvoltarea unei scheme funcționale a unui sistem de control automat (sar)
ACS poate fi reprezentat de două părți principale - obiectul reglementării și dispozitivul de reglementare - regulatorul.
Starea obiectului este determinată de un număr de valori care caracterizează:
Impactul asupra obiectului dispozitivelor de reglementare;
Influența asupra obiectului mediului extern;
Fluxul proceselor în interiorul obiectului însuși.
În general, obiectul reglementării poate fi reprezentat de următoarea schemă:
Orez. 1. Schema obiectului reglementării
Unde Z este totalitatea influențelor externe controlate;
F - influențe externe necontrolate;
X – influențe de reglementare;
U - valori reglabile.
În cazul nostru, obiectul (generator de curent continuu) are un efect reglabil (curent forțat i c) și o valoare reglabilă (tensiune de clemă U n) și se numește simplu sau simplu conectat.
Comportamentul obiectului reglat poate fi considerat în modurile statică și dinamică. O diagramă funcțională este o diagramă în care fiecărui element funcțional al sistemului îi corespunde o anumită legătură. Schema schematică a ATS dezvoltat este prezentată în anexa grafică.
Pentru acest ACS, diagrama funcțională arată astfel:
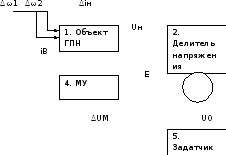
Figura 2. Diagrama funcțională a ACS
Unde 1 - obiectul reglementării - un generator de tensiune constantă;
2 – divizor de tensiune;
3 - aparat de comparare, este un nod stimulator;
4 - amplificator (în cazul nostru, un amplificator magnetic cu automagnetizare);
5 - setter - dispozitiv pentru setarea instalației.
Curentul de sarcină al amplificatorului magnetic este o variabilă de control, deci nu există un actuator pe diagrama funcțională.
Principiul de funcționare:
Valoarea reglată este tensiunea U n la bornele generatorului, care este comparată cu tensiunea de referință U 0 prin divizorul K (U 1) nepotrivirea E este alimentată la înfășurarea de control a amplificatorului magnetic. Sarcina amplificatorului magnetic este curentul din înfășurarea de excitație a excitatorului generatorului auxiliar.
Setarea este stabilită de raportul divizor de tensiune reglabil R 1 , care stabilește corespondența dintre tensiunea reglată U n și tensiunea de referință U 0 .
Influențe perturbatoare, necontrolate sunt: căderea de tensiune în înfășurările generatorului cauzată de curentul de sarcină i n; interferența cauzată de curentul de sarcină i n; interferența cauzată de modificarea vitezei de rotație a arborilor generatorului ω 1 și ω 2 ; fluctuația tensiunii de alimentare a amplificatorului magnetic ∆U n.
În conformitate cu sarcina din diagrama noastră funcțională, valorile de intrare și de ieșire sunt indicate pentru fiecare bloc funcțional. Sunt prezentate și acțiunile influențelor perturbatoare.
Conform principiului reglementării sisteme automate de control sunt împărțite în patru clase.
1. Sistem de stabilizare automată - un sistem în care controlerul menține o valoare setată constantă a parametrului controlat.
2. Sistem de control program - un sistem care asigură o modificare a parametrului controlat conform unei legi prestabilite (în timp).
3. Sistem de urmărire - un sistem care oferă o modificare a parametrului controlat în funcție de o altă valoare.
4. Sistem de control extrem - un sistem în care regulatorul menține valoarea variabilei controlate care este optimă pentru condițiile în schimbare.
Pentru reglementare regim de temperatură se folosesc instalatii electrice de incalzire, in principal sisteme din primele doua clase.
Sistemele automate de control al temperaturii pot fi împărțite în două grupe în funcție de tipul de acțiune: reglare intermitentă și continuă.
Regulatoare automate pt caracteristici funcționale se împart în cinci tipuri: pozițional (releu), proporțional (static), integral (astatic), izodromic (proporțional-integral), izodromic cu avans și cu derivată întâi.
Regulatoarele poziționale sunt denumite ACS intermitent, iar alte tipuri de regulatoare sunt denumite ACS continuu. Mai jos sunt principalele caracteristici ale controlerelor poziționale, proporționale, integrale și izodromice, care sunt cele mai utilizate în sistemele automate de control al temperaturii.
(Fig. 1) constă dintr-un obiect de control 1, un senzor de temperatură 2, un dispozitiv de programare sau un reglator de nivel al temperaturii 4, un controler 5 și un actuator 8. În multe cazuri, un amplificator primar 3 este plasat între senzor și dispozitiv de programare, și între controler și dispozitiv executiv- amplificatorul secundar 6. Senzorul suplimentar 7 este utilizat în sistemele de control izodromic.
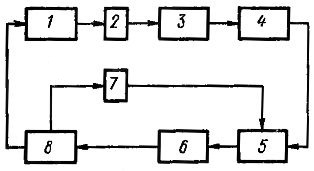
Orez. 1. Schema funcțională a controlului automat al temperaturii
Regulatoare de temperatură poziționale (releu).
Regulatorii de poziție sunt cei în care organismul de reglementare poate ocupa două sau trei posturi specifice. În instalațiile de încălzire electrică se folosesc regulatoare cu două și trei poziții. Ele sunt simple și fiabile în funcționare.
Pe fig. 2 prezentat schema circuitului reglare în două poziții a temperaturii aerului.
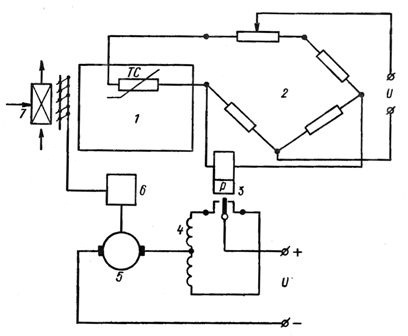
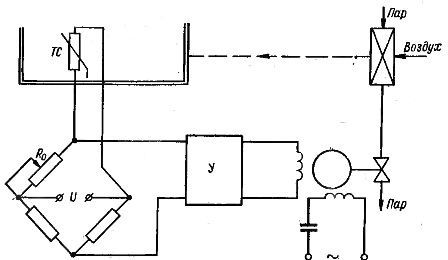
Orez. 2. Schema schematică a controlului temperaturii aerului on-off: 1 - obiect de control, 2 - punte de măsurare, 3 - releu polarizat, 4 - înfășurări de excitație a motorului, 5 - armătură motor, 6 - reductor, 7 - calorifer.
Pentru controlul temperaturii în obiectul reglat se folosește rezistența termică TS, care este inclusă într-unul dintre brațele punții de măsurare 2. Valorile rezistenței punții sunt selectate astfel încât la o temperatură dată puntea este echilibrat, adică tensiunea în diagonala punții este zero. Când temperatura crește, releul polarizat 3, inclus în diagonala punții de măsurare, pornește una dintre înfășurările 4 ale motorului electric. curent continuu, care, cu ajutorul reductorului 6, se închide valva de aerîn fața încălzitorului 7. Când temperatura scade, supapa de aer se deschide complet.
Cu controlul temperaturii în două poziții, cantitatea de căldură furnizată poate fi setată doar la două niveluri - maxim și minim. Cantitatea maximă de căldură trebuie să fie mai mare decât este necesar pentru a menține temperatura controlată dorită, iar cea minimă trebuie să fie mai mică. În acest caz, temperatura aerului fluctuează în jurul valorii setate, adică așa-numita modul auto-oscilator(Fig. 3, a).
Liniile corespunzătoare temperaturilor τ n și τ în definesc limitele inferioare și superioare ale zonei moarte. Când temperatura obiectului reglat, în scădere, atinge valoarea τ n, cantitatea de căldură furnizată crește instantaneu și temperatura obiectului începe să crească. După ce a atins valoarea τ in, regulatorul reduce furnizarea de căldură și temperatura scade.
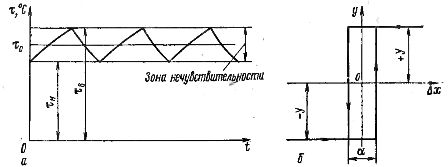
Orez. 3. Răspunsul în timp al controlului pornit-oprit (a) și răspunsul static al controlerului pornit-oprit (b).
Viteza de creștere și scădere a temperaturii depinde de proprietățile obiectului reglat și de caracteristica timpului acestuia (curba de accelerație). Fluctuațiile de temperatură nu depășesc banda moartă dacă schimbările în alimentarea cu căldură provoacă imediat schimbări de temperatură, adică dacă nu există întârzierea obiectului controlat.
Odată cu o scădere a zonei moarte, amplitudinea fluctuațiilor de temperatură scade până la zero la τ n = τ c. Totuși, acest lucru necesită ca alimentarea cu căldură să fie variată la o frecvență infinit de mare, ceea ce este extrem de dificil de implementat în practică. În toate obiectele reale de reglementare există o întârziere. Procesul de reglementare în ele decurge aproximativ după cum urmează.
Când temperatura obiectului reglat scade la valoarea τ n, sursa de căldură se modifică instantaneu, totuși, din cauza întârzierii, temperatura continuă să scadă pentru un timp. Apoi se ridică la valoarea τ la care aportul de căldură scade instantaneu. Temperatura continuă să crească de ceva timp, apoi, din cauza alimentării reduse de căldură, temperatura scade, iar procesul se repetă din nou.
Pe fig. 3, b este prezentat caracteristica statică a controlerului pornit/oprit. Din aceasta rezultă că impactul normativ asupra obiectului poate lua doar două valori: maxim și minim. În exemplul considerat, maximul corespunde poziției în care supapa de aer (vezi Fig. 2) este complet deschisă, minim - când supapa este închisă.
Semnul acțiunii de control este determinat de semnul abaterii valorii reglate (temperatura) de la valoarea sa stabilită. Mărimea acțiunii de control este constantă. Toate controlerele cu două poziții au o zonă de histerezis α, care apare din cauza diferenței de curenți de funcționare și de eliberare ai releului electromagnetic.
Exemplu de utilizare a controlului temperaturii pornit/oprit:
Regulatoare de temperatură proporționale (statice).
În cazurile în care este necesară o precizie ridicată de control sau când un proces auto-oscilant este inacceptabil, aplicați controlere cu proces de control continuu. Acestea includ regulatoare proporționale (regulatoare P) potrivit pentru controlul unei game largi de procese tehnologice.
În cazurile în care este necesară o precizie ridicată de control sau când un proces auto-oscilator este inacceptabil, se folosesc regulatoare cu un proces de control continuu. Acestea includ regulatoare proporționale (P-regulatoare), potrivite pentru reglarea unei game largi de procese tehnologice.
În sistemele de control automat cu regulatoare P, poziția organismului de reglementare (y) este direct proporțională cu valoarea parametrului controlat (x):
y=k1х,
unde k1 este factorul de proporționalitate (câștigul controlerului).
Această proporționalitate are loc până când corpul de reglare atinge pozițiile sale extreme (întrerupătoare de limită).
Viteza de mișcare a corpului de reglare este direct proporțională cu rata de modificare a parametrului controlat.
Pe fig. 4 prezintă o diagramă schematică a unui sistem de control automat al temperaturii camerei folosind un regulator proporțional. Temperatura camerei se măsoară cu ajutorul unui termometru cu rezistență TC inclus în circuitul 1 al punții de măsurare.

Orez. 4. Schema de control proporțional al temperaturii aerului: 1 - punte de măsurare, 2 - obiect de control, 3 - schimbător de căldură, 4 - motor condensator, 5 - amplificator sensibil la fază.
La o temperatură dată, puntea este echilibrată. Când temperatura controlată se abate de la valoarea setată, în diagonala podului apare o tensiune de dezechilibru, a cărei mărime și semn depind de mărimea și semnul abaterii temperaturii. Această tensiune este amplificată de un amplificator sensibil la fază 5, la ieșirea căruia înfășurarea unui bifazat. motor condensator 4 actuatoare.
Actuatorul deplasează elementul de comandă, modificând debitul de lichid de răcire în schimbătorul de căldură 3. Concomitent cu deplasarea elementului de comandă se modifică rezistența unuia dintre brațele punții de măsurare, în urma căreia se modifică temperatura, la pe care podul este echilibrat.
Astfel, datorită feedback-ului rigid, fiecărei poziții a corpului de reglare corespunde propriei valori de echilibru a temperaturii controlate.
Un controler proporțional (static) se caracterizează prin reglare neuniformă reziduală.
În cazul unei abateri bruște a sarcinii de la valoarea setată (în momentul t1), parametrul controlat va ajunge după o anumită perioadă de timp (momentul t2) la o nouă valoare constantă (Fig. 4). Totuși, acest lucru este posibil numai cu o nouă poziție a organismului de reglementare, adică cu o nouă valoare a parametrului controlat, care diferă de valoarea setată cu δ.

Orez. 5. Caracteristicile de timp ale controlului proporțional
Dezavantajul regulatoarelor proporționale este că fiecare valoare a parametrului corespunde doar unei poziții specifice a regulatorului. Pentru a menține valoarea setată a parametrului (temperatura) atunci când sarcina (consumul de căldură) se modifică, este necesar ca organismul de reglare să ia o poziție diferită corespunzătoare noii valori de sarcină. Acest lucru nu se întâmplă într-un controler proporțional, ceea ce are ca rezultat o abatere reziduală a variabilei controlate.
Integral (regulatori astatici)
integral (astatic) se numesc astfel de regulatoare în care, atunci când parametrul se abate de la valoarea setată, corpul de reglare se mișcă mai mult sau mai puțin lent și tot timpul într-o direcție (în cursa de lucru) până când parametrul preia din nou valoarea setată. Direcția de cursă a corpului de reglare se modifică numai atunci când parametrul trece prin valoarea setată.
În regulatoarele integrale ale acțiunii electrice, o zonă moartă este de obicei creată artificial, în care modificarea unui parametru nu provoacă mișcarea organismului de reglementare.
Viteza de mișcare a corpului de reglare în regulatorul integral poate fi constantă și variabilă. O caracteristică a controlerului integral este absența unei relații proporționale între valorile stabilite ale parametrului controlat și poziția organismului de reglementare.
Pe fig. 6 prezintă o diagramă schematică a unui sistem automat de control al temperaturii folosind un controler integrat. În acesta, spre deosebire de circuitul de control proporțional al temperaturii (vezi Fig. 4), nu există un feedback greu.
Orez. 6. Schema reglementare integrală temperatura aerului
Într-un controler integral, viteza corpului de reglare este direct proporțională cu abaterea parametrului controlat.
Procesul de control integral al temperaturii cu o schimbare bruscă a sarcinii (consum de căldură) este prezentat în fig. 7 cu ajutorul caracteristicilor de timp. După cum se poate observa din grafic, variabila controlată cu control integral revine încet la valoarea setată.

Orez. 7. Caracteristicile de timp ale reglajului integral
Controlere izodromice (proporțional-integrale).
Reglarea izodromică are proprietățile reglării atât proporționale, cât și integrale. Viteza de mișcare a corpului de reglare depinde de mărimea și viteza abaterii parametrului controlat.
Dacă parametrul controlat se abate de la valoarea setată, reglarea se efectuează după cum urmează. Inițial, corpul de reglare se mișcă în funcție de mărimea abaterii parametrului controlat, adică are loc reglarea proporțională. Apoi organul de reglare face o mișcare suplimentară, care este necesară pentru a elimina neuniformitatea reziduală (reglare integrală).
Un sistem izodromic de control al temperaturii aerului (Fig. 8) poate fi obținut prin înlocuirea feedback-ului rigid în circuitul de control proporțional (vezi Fig. 5) cu un feedback elastic (de la regulator la glisorul rezistenței de feedback). Feedback-ul electric în sistemul izodromic este realizat de un potențiometru și este introdus în sistemul de control printr-un circuit care conține rezistența R și capacitatea C.
În timpul proceselor tranzitorii, semnalul de feedback, împreună cu semnalul de abatere a parametrului, afectează elementele ulterioare ale sistemului (amplificator, motor electric). Când corpul de reglare este staționar, indiferent de poziție, pe măsură ce condensatorul C este încărcat, semnalul de reacție scade (în starea staționară este egal cu zero).
Orez. 8. Schema de control izodrom al temperaturii aerului
Este tipic pentru controlul izodromic ca neuniformitatea controlului (eroarea relativă) să scadă odată cu creșterea timpului, apropiindu-se de zero. În acest caz, feedback-ul nu va provoca abateri reziduale ale valorii controlate.
Astfel, controlul izodromic duce la rezultate mult mai bune decât controlul proporțional sau integral (ca să nu mai vorbim de controlul pozițional). Controlul proporțional datorită prezenței feedback-ului rigid are loc aproape instantaneu, izodromic - lent.
Sisteme software pentru controlul automat al temperaturii
Pentru a implementa controlul programului, este necesar să se influențeze continuu setarea (punctul de referință) al regulatorului, astfel încât valoarea controlată să se modifice conform unei legi prestabilite. În acest scop, unitatea de reglare a controlerului este furnizată cu un element software. Acest dispozitiv servește la stabilirea legii modificării valorii date.
În timpul încălzirii electrice, actuatorul ACS poate acționa pentru a porni sau opri secțiuni ale elementelor electrice de încălzire, modificând astfel temperatura instalației de încălzire în conformitate cu un program dat. Controlul software al temperaturii și umidității aerului este utilizat pe scară largă în instalațiile climatice artificiale.
Teoria modernă a controlului automat este partea principală a teoriei controlului. Sistemul de control automat constă dintr-un obiect reglabil și comenzi care acționează asupra obiectului atunci când una sau mai multe variabile reglabile se modifică. Sub influența semnalelor de intrare (control sau perturbare), variabilele controlate se modifică. Scopul reglementării este de a forma astfel de legi, conform cărora variabilele reglementate de ieșire ar diferi puțin de valorile cerute. Rezolvarea acestei probleme în multe cazuri este complicată de prezența unor perturbații aleatorii (zgomot). În acest caz, este necesar să alegeți o astfel de lege de control în care semnalele de control să treacă prin sistem cu distorsiuni reduse, iar semnalele de zgomot să nu fie practic transmise.
Teoria controlului automat a parcurs un drum lung în dezvoltarea sa. În etapa inițială, au fost create metode de analiză a stabilității, calității și acurateței reglării sistemelor liniare continue. Apoi, metodele de analiză a discretelor și discrete- sisteme continue. Se poate observa că metodele de calcul a sistemelor continue se bazează pe metode de frecvență, iar metodele de calcul a sistemelor discrete și discrete-continue se bazează pe metode de transformare z.
În prezent, se dezvoltă metode de analiză a sistemelor de control automat neliniar. Încălcarea principiului suprapunerii în sistemele neliniare, prezența unui număr de regimuri alternative (în funcție de impact) de mișcări stabile, instabile și auto-oscilații complică analiza acestora. Proiectantul întâmpină dificultăți și mai mari atunci când calculează sisteme de control extreme și auto-ajustabile.
Atât teoria controlului automat, cât și teoria controlului sunt incluse în știință sub denumirea generală de „cibernetică tehnică”, care a primit acum o dezvoltare semnificativă. Cibernetica tehnică studiază tiparele generale ale sistemelor complexe de control dinamic pentru tehnologia și Procese de producție. cibernetica tehnica, control automatși controlul automat se dezvoltă în două direcții principale: prima este asociată cu progresul și îmbunătățirea constantă în proiectarea elementelor și a tehnologiei de fabricare a acestora; al doilea - cu utilizarea cea mai rațională a acestor elemente sau a grupurilor lor, care este sarcina de a proiecta sisteme.
Proiectarea sistemelor automate de control poate fi realizată în două moduri: prin metoda analizei, când, cu o structură de sistem preselectată (prin calcul sau modelare), se determină parametrii acesteia;
prin metoda de sinteză, când, conform cerințelor, se aleg imediat cea mai bună structură și parametrii pentru sistem. Ambele metode sunt pe scară largă uz practicși, prin urmare, sunt acoperite pe deplin în această carte.
Determinarea parametrilor unui sistem, atunci când structura și cerințele acestuia pentru întregul sistem sunt cunoscute, se referă la problema sintezei. Soluția la această problemă cu un obiect de control liniar poate fi găsită folosind, de exemplu, metodele de frecvență, metoda locului rădăcinii sau studiind traiectoriile rădăcinilor ecuației caracteristice a unui sistem închis. Selectarea unui dispozitiv corector prin sinteză în sala de clasă funcții raționale fracționale variabilă complexă poate fi realizată folosind metode grafico-analitice. Aceleași metode fac posibilă sintetizarea dispozitivelor corective care suprimă modurile periodice auto-oscilante și instabile în sistemele neliniare.
Metodele de sinteză au fost dezvoltate în continuare pe baza principiilor programării maxime și dinamice, atunci când se determină legea optimă de control din punctul de vedere al unui anumit criteriu de calitate, care asigură limita superioară a calității sistemului, care trebuie să fie pentru care s-a străduit atunci când îl proiectăm. Cu toate acestea, soluția acestei probleme practic nu este întotdeauna posibilă din cauza complexității descrierii matematice a proceselor fizice din sistem, a imposibilității de rezolvare a problemei de optimizare în sine și a dificultăților în implementarea tehnică a legii de control neliniar găsite. Trebuie remarcat faptul că implementarea legilor complexe de control este posibilă numai atunci când un computer digital este inclus în bucla de sistem. Crearea de sisteme extreme și auto-ajustabile este, de asemenea, asociată cu utilizarea computerelor analogice sau digitale.
Formarea sistemelor de control automat, de regulă, se realizează pe baza metodelor analitice de analiză sau sinteză. În această etapă de proiectare a sistemelor de control, pe baza ipotezelor acceptate, se întocmește un model matematic al sistemului și se selectează structura preliminară a acestuia. În funcție de tipul de model (liniar sau neliniar), se alege o metodă de calcul pentru a determina parametrii care asigură indicatorii specificați de stabilitate, acuratețe și calitate. După aceea, modelul matematic este rafinat și, folosind mijloacele modelare matematică defini procese dinamiceîn sistem. Sub acțiunea diferitelor semnale de intrare se iau caracteristicile de frecvență și se compară cu cele calculate. Apoi se stabilesc în final marjele de stabilitate ale sistemului în fază și modul și se găsesc principalii indicatori de calitate.
Mai mult, stabilirea acțiunilor tipice de control asupra modelului; elimina caracteristicile de precizie. Pe baza modelării matematice se întocmesc cerințele tehnice pentru echipamentul sistemului. Un controler este asamblat din echipamentul fabricat și transferat la modelarea semi-naturală, în care obiectul de control este colectat sub forma unui model matematic.
Pe baza caracteristicilor obținute ca urmare a modelării HIL, se ia o decizie cu privire la adecvarea controlorului de a lucra cu un obiect real de reglementare. Selecția finală a parametrilor controlerului și reglarea acestuia se efectuează în condiții naturale în timpul dezvoltării experimentale a sistemului de control.
Dezvoltarea teoriei controlului automat bazat pe ecuațiile de stare și transformările z, principiul maximului și metoda de programare dinamică îmbunătățește metoda de proiectare a sistemelor de control și vă permite să creați sisteme automate extrem de eficiente pentru cel mai mult diverse industrii Economie nationala.
Sistemele de control automat obtinute in acest mod asigura calitatea inalta a produselor, reduc costurile acestora si cresc productivitatea muncii.
Vă sfătuim să citiți
, diagnostic, tratament Tratamentul chlamydia urogenital") Chlamydia urogenital - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenital
Chlamydia urogenital - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenital Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce
Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce Să aștepți sau să nu aștepți un tip din armată Din ce motiv pot fi comandați din armată
Să aștepți sau să nu aștepți un tip din armată Din ce motiv pot fi comandați din armată Mere coapte cu branza de vaci. Mere la cuptor cu branza de vaci
Mere coapte cu branza de vaci. Mere la cuptor cu branza de vaci

