1.1 Concepte și tipuri de bază
REGLARE AUTOMATĂ
Controlul automat este un set de acțiuni care vizează implementarea funcționării obiectului de control în conformitate cu programul și scopul controlului.
Un obiect de control este înțeles ca un dispozitiv în care se menține valoarea indicatorilor necesari unui proces. Starea actuală a obiectului de control este determinată de unul sau mai mulți parametri de funcționare y i , numite valori reglabile sau coordonate reglabile și determinarea acțiunilor sistemului de control (Fig. 1.1).
Cunoașteți metodele, principiile și fundamentele automatizării? Actualizați procesul în care activitatea umană va fi înlocuită cu activitatea diferitelor dispozitive și dispozitive! Vă vom prezenta diferitele tipuri de control și modul în care funcționează controlul automatizării.
În trecut, totul era controlat manual. Acest lucru s-a schimbat însă odată cu începerea automatizării. Astăzi distingem tipuri diferite management. Controlul este o acțiune asupra unui obiect pentru a atinge un obiectiv dat. Cu toate acestea, toată lumea a încercat întotdeauna să scape de activitățile fizice și mentale plictisitoare, care, prin urmare, au început să preia treptat automatele. Când controlul automat a fost înlocuit cu controlul manual, am putea începe să vorbim despre începutul automatizării. Împărțim controlul automat în direct și indirect.
LAîn condiţii reale, obiectul de control este influenţat de influenţe externe, care se numesc perturbaţii f i. În esență, orice mărime fizică care caracterizează obiectul controlat, de exemplu, viteza (liniară și rotație), tensiunea și curentul, deplasările liniare și unghiulare etc. pot fi utilizate ca mărimi reglate.
Trei tipuri de control și definire a reglementării
În primul dintre ele, procesul de control are loc fără sursă de alimentare. În prezent, însă, cel de-al doilea tip de management al energiei este utilizat în mod obișnuit și este discutat în textul de mai jos. Putem partaja controlul automatizării cu sursa de alimentare, în funcție de faptul dacă ieșirea acesteia este acceptată.
Control Control forme superioare Control. . Controlul este o metodă de control care nu poate fi controlată în niciun fel. Reglarea în automatizare constă în menţinere cantitate fizica la o valoare constantă sau la o valoare care se modifică după o regulă. Valorile cantităților sunt comparate constant cu valoarea necesară în timpul controlului. Orice abateri sunt eliminate prin intervenții în procesul de reglementare. Figura următoare ilustrează clar diferența dintre control și reglare.
Valori ajustabile y i determinate de actiuni de control U i (t) la intrarea obiectului de control. Aceste efecte provoacă modificări în starea internă a sistemului de operare și, ca urmare, în parametrii de funcționare controlați.
În mod obișnuit, controlul automat este efectuat folosind dispozitive de control automate fără intervenție umană. Combinația dintre dispozitivul de control automat și obiectul de control, interacționând unul cu celălalt, formează un sistem de control automat (ACS).
Forme superioare de management și inteligență artificială
Diagrama arată cum funcționează automatizarea. Sursa: Ivan Schwartz, Fundamentals of Automation. Formele superioare de control includ controlul optim, controlul adaptiv, învățarea și inteligența artificială. Controlul optim este cât se poate de eficient sau, dimpotrivă, foarte rapid. Sistemul este capabil sa realizeze proprietatile dorite cu un consum minim de energie, cautand intotdeauna cele mai benefice efecte si asigurand astfel cel mai bun comportament al sistemului in conditiile date.
Principalele tipuri de control automat sunt:
1) control automat cu un lanț deschis de influențe (control dur);
2) reglare automată;
3) setare automată.
Sistemele de control automat cu un lanț deschis de influențe sunt de obicei numite deschise. În aceste sisteme, controlul se realizează conform legilor; independent de cursul real de producție
Dezvoltarea unei diagrame funcționale a ATS
Cu controlul adaptiv, sistemul își poate schimba chiar structura și parametrii. Se adaptează întotdeauna la procesul de control optim, se adaptează la modificările parametrilor obiectului controlat. În procesul de management, care se numește învățare, sistemul adaptiv este și mai perfect. El își poate aminti informațiile primite și le poate reutiliza în situații similare.
Inteligența artificială este un sistem cu cel mai înalt grad de control. Un sistem creat artificial poate recunoaște obiecte și fenomene și poate analiza relațiile lor. Acest lucru creează modele ale mediului și ia decizii semnificative și poate prezice consecințele acestora. Un sistem de inteligență artificială poate descoperi noi modele și chiar își poate îmbunătăți performanța.
proces, și se realizează într-o buclă deschisă pentru a obține un anumit rezultat final (Fig. 1.2, a).
Sarcină grea la intrarea sistemului prin dispozitivul de control CU și dispozitiv executiv(amplificator) DUT acționează asupra obiectului de control al amplificatorului operațional, la ieșirea căruia este setată valoarea X Ieșire corespunzătoare acestei sarcini X în .
Principii de funcționare a sistemului de control pe sistemul gestionat
Există mai multe moduri de a implementa controlul automat. Controalele logice, continue, discrete și neclare diferă unele de altele prin principiul de funcționare a sistemului de control pe sistemul controlat. Care sunt caracteristicile fiecărui tip de condus?
Acest lucru apare ca urmare a implementării computerelor ca controler pentru a controla computerele care nu pot procesa un semnal continuu este convertit într-o conexiune discretă între intrări și ieșiri, deoarece relația dintre secvența de impulsuri citite în secvența de timp a perioadei de eșantionare a timpului de prelevare este redus printr-un proces rapid controlat.
- Controlul utilizează variabile cu două valori.
- Există întotdeauna doar două opțiuni.
- Cantitățile sunt exprimate ca valori 1 și 0.
- Relațiile dintre variabile se numesc funcții logice.
- Acțiunea de acțiune este permanent setată.
- Cantitatile se schimba continuu in timp.
- Creează o legătură continuă între intrări și ieșiri.
În astfel de sisteme, cursul procesului și valoarea controlată de ieșire nu sunt corectate (nu sunt controlate), prin urmare, se poate abate de la modul specificat. Controlul utilizat în astfel de sisteme se numește control în buclă deschisă.
ACS cu un lanț deschis de influențe sunt utilizate pentru a asigura o anumită secvență de funcționare a diferitelor elemente ale dispozitivelor automate. În cazuri mai complexe, poate fi efectuat un control de program al unui proces cu un ciclu deschis de influențe. Un exemplu este sistemul de control pentru pornirea și frânarea motoarelor.
Faptul că funcțiile de control sunt calculate digital în acest caz este motivul pentru discretizare în timpul funcționării sistemului. Termenul de sistem discret în sine, spre deosebire de un sistem continuu, înseamnă că valorile incluse în proces sunt sub forma unei secvențe de impulsuri, care corespunde reprezentării funcției numai în mod specific și, în principiu, egal. intervale de timp. Un alt tip de eșantionare, prezent și în sistemele de control digital, este cuantizarea valorii semnalului.
În sistemele reale, cel mai important motiv pentru apariția valorilor minime de modificare pe lângă lungimea cuvântului utilizat în microcontroler este precizia de procesare obținută în convertoare analog-digitale. Schema generala sistemul de control discret este prezentat în figură. Blocul controler este reprezentat în această soluție prin intermediul unui algoritm de control conținut în programul microcontrolerului. Mărimea măsurată - care constituie semnalul de feedback - este introdusă în microcontroler numai în așa-numitele momente de eșantionare, repetate cu o perioadă.
În sistemele de control în buclă deschisă, controlul se realizează în funcție de acțiunea principală, care, în caz general poate reprezenta comenzi de program.
Acest principiu constă în faptul că pentru a reduce abaterea variabilei controlate de la valoarea setată, care apare datorită inerției obiectului sistem, acțiunea de control se formează în conformitate cu această acțiune și cu caracteristicile obiectului de control. (Fig. 1.2, a). 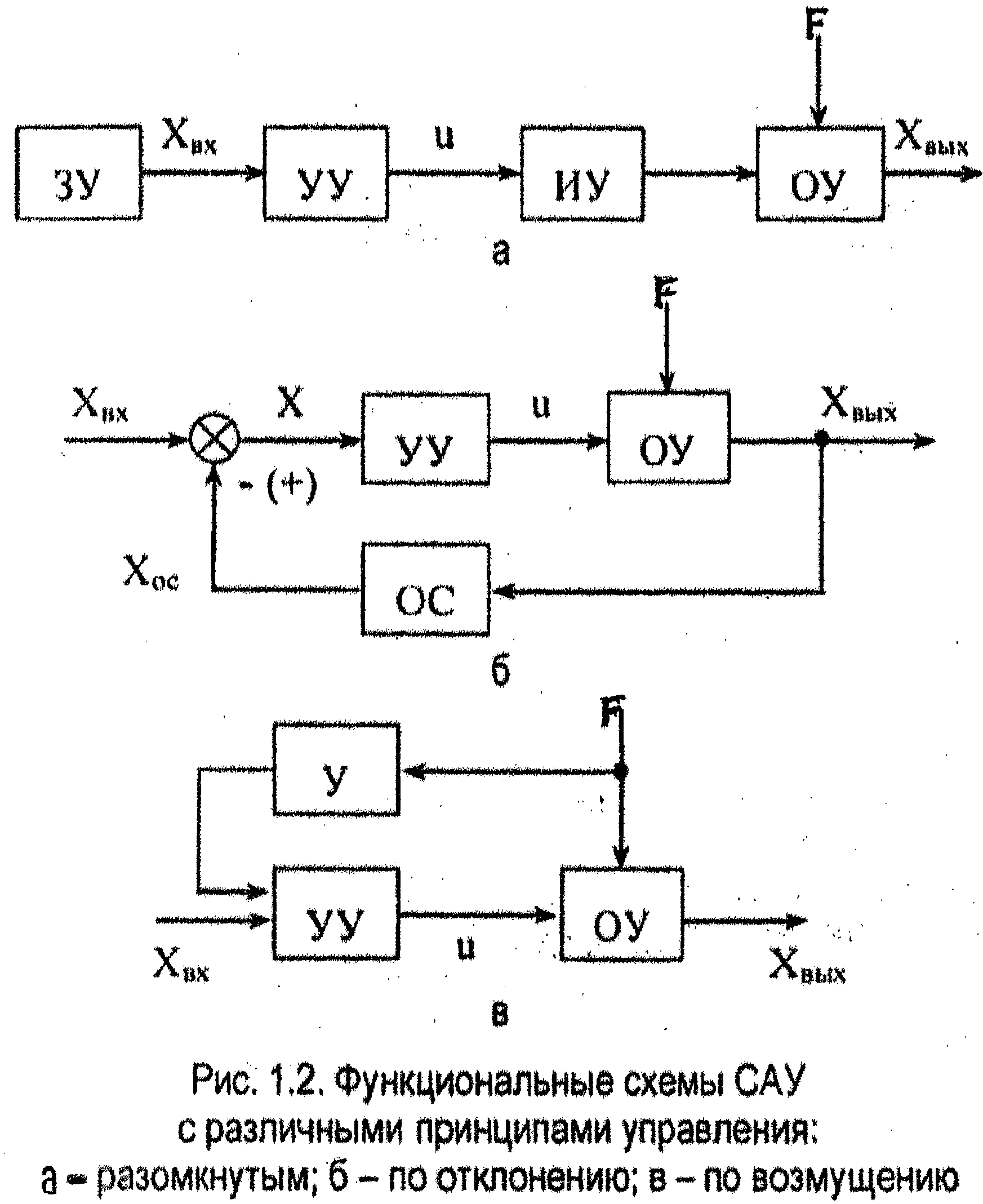
Rezultatul calculului algoritmului de control este introdus și cu o rată de eșantionare, unde este fie utilizat sub formă numerică pentru a controla sistemul executiv, fie necesită conversie la o valoare analogică. Circuitele digitale discrete înlocuiesc sistemele analogice. Sistemul digital garanteaza stabilitatea parametrilor de control in timp si cu schimbarile de temperatura, precum si usurinta schimbarii acestora, chiar si atunci cand dispozitivul este controlat. În timpul lucrului, este, de asemenea, acceptabil să se schimbe structura sistemului, ceea ce crește foarte mult flexibilitatea managementului.
Dispozitivul de control convertește și amplifică acțiunea principală și generează acțiunea de control u(t).
Acțiunea de control de la ieșirea unității de control intră în obiectul de control al unității de control și caută să modifice valoarea controlată X Ieșireîn conformitate cu forţa motrice.
Un astfel de control se numește rigid, deoarece nu ia în considerare valorile reale ale variabilei controlate și influențele perturbatoare (parametrii ACS sunt considerați constanți).
În general, controlerele digitale sunt mult mai capabile să utilizeze metode moderne de control, ținând cont de operații matematice relativ complexe. Procedurile de optimizare utilizate în sistemele de control digital pot lua în considerare criterii mai complexe, cum ar fi criteriile integrale derivate din structurile moderne de control al spațiului de stat. Datorită ușurinței modificării parametrilor în timpul funcționării sistemului, sunt create controlere care au proprietatea de a se autoajusta la parametrii unui anumit obiect pe baza măsurătorilor efectuate automat în timpul pornirii.
PRINCIPII DE BAZĂ DE MANAGEMENT
În funcție de metodele de formare a acțiunii de control, se disting următoarele principii de control:
Principiul controlului perturbațiilor,
Principiul controlului abaterii,
Principiul controlului combinat.
PRINCIPIUL CONTROLULUI PERTURBĂRILOR
Reducerea sau eliminarea abaterii variabilei controlate de la valoarea cerută, cauzată de influența diverselor perturbații în sistemele deschise, se poate realiza prin aplicarea principiului controlului perturbațiilor, discutat mai jos. Schema funcțională a controlului perturbațiilor este dată în Fig. 1.2, c. Principiul controlului perturbaţiei este acela pentru a reduce sau elimina abaterea variabilei controlate X Ieșire din valoarea setată se măsoară efectul perturbator principal F și este convertită într-o acțiune de control u(t) aplicată intrării sistemului pentru a compensa abaterea variabilei controlate cauzată de perturbare. Prin urmare, în astfel de sisteme, acțiunea de control este o funcție a acțiunii perturbatoare.
în sisteme cu principiul controlului prin perturbare pentru formarea acțiunii de control u(t) se folosesc informații directe despre efectul perturbator. Prin urmare, în aceste sisteme, este posibil să se compenseze pe deplin influența acțiunii perturbatoare asupra valorii controlate X Ieșire . Gradul de compensare a influenței perturbatoare depinde de precizia măsurării influenței perturbatoare și de caracteristicile amplificatorului operațional.
Avantajul ACS cu principiul controlului perturbațiilor este că vă permit să compensați pe deplin efectul perturbator. Astfel de sisteme de control automate sunt în buclă deschisă, prin urmare, ca în orice sistem în buclă deschisă, nu există nicio problemă de stabilitate aici.
Dacă în sistem există mai multe influențe perturbatoare, toate pot fi compensate separat în același mod, dacă este posibil să le măsoare. Cu toate acestea, acest lucru complică sistemul. În practică, sunt compensate doar influențele perturbatoare, care afectează cel mai puternic valoarea controlată și provoacă abateri semnificative ale acesteia de la valoarea cerută. Astfel de perturbări sunt numite fundamentale. Perturbațiile minore se numesc perturbații care provoacă doar abateri minore ale valorii controlate de la valoarea setată.
Dezavantajul unui astfel de ACS este că elimină influența doar a principalelor perturbații. În plus, acuratețea reglării și a compensării sunt reduse atunci când caracteristicile amplificatorului operațional se schimbă.
Principiul controlului perturbațiilor este utilizat în sistemele concepute pentru a menține o variabilă controlată constantă.
PRINCIPIUL CONTROLULUI DEBATĂRII
Reglarea automată se caracterizează prin faptul că funcțiile de control sunt dependente de cursul real de producție proces pentru a menține performanța cerută acest proces. Controlul și informațiile despre valorile reale ale indicatorilor acestui proces sunt efectuate folosind feedback.
În cazul general, un astfel de sistem de control automat poate fi prezentat în Fig. 1.2, b. Sistemul utilizează control în buclă închisă (principiul feedback-ului sau controlul abaterii). Abaterea de control este diferența dintre valoarea măsurată reală și valoarea setată. Diferența reciprocă dintre valoarea de referință și valoarea reală se numește eroare de control. Dispozitivul de control este înțeles ca un dispozitiv tehnic cu ajutorul căruia obiectul de control este controlat automat.
Valoare controlată X Ieșire determinată de influenţa motrice X în = X h la intrarea sistemului, adică influența introdusă în sistem și determinarea legii necesare schimbării variabilei controlate. La intrarea sistemului în elementul de comparație, pe lângă acțiunea principală, valoarea reală a variabilei controlate este alimentată prin circuitul de feedback. La ieșirea elementului de comparație, i.e. la intrarea dispozitivului de control CU apare o abatere sau o actiune de control
![]() ,
,
care prevede o modificare a valorii controlate conform unei legi date.
Dispozitivul de control, în funcție de mărimea și semnul anulării, generează o acțiune de reglementare și. Astfel, principiul controlului închis ia în considerare nu numai sarcina, ci și starea reală a obiectului de control și perturbațiile existente. Prin urmare, acest principiu este cel mai universal și vă permite să rezolvați cu succes problemele de control, în ciuda incertitudinii obiectului de control și a naturii perturbațiilor.
Clasa unor astfel de sisteme automate, construită pe baza principiului controlului închis, se numește sisteme de control automate (ACS). Proprietatea de universalitate a unor astfel de sisteme le permite să fie utilizate pe scară largă în tehnologie și natură.
Feedback-ul în sistemele de control automat închise servesc la formarea caracteristicilor statice și dinamice ale sistemului. Aceste caracteristici sunt determinate de scopul sistemului de control automat și de cerințele impuse acestuia de procesul tehnologic. Feedback-ul controlează cursul procesului și, în cazul abaterii acestuia de la cel specificat, semnalele corective sunt transmise la intrarea sistemului sau la intrarea unui grup de elemente acoperite de acest feedback.
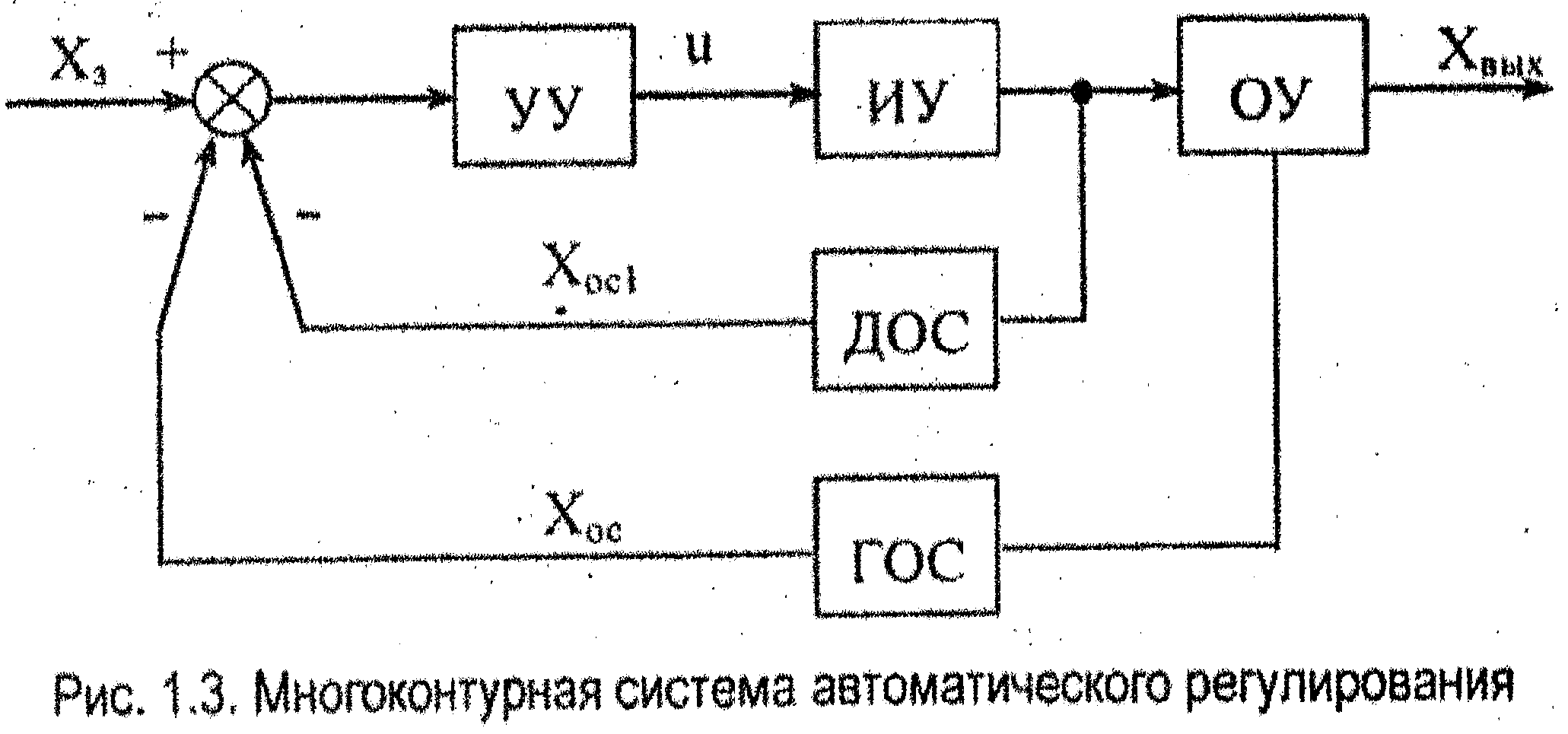
ACS trebuie să aibă cel puțin un feedback, care servește la compararea valorilor reale și setate ale variabilei controlate. Un astfel de feedback este numit principal. Conectează ieșirea sistemului cu intrarea acestuia, acoperind toate elementele principale. Sistemele care au un feedback principal (GOS) sunt numite buclă unică. Unele ACS, pe lângă feedback-urile principale (GOS), al căror număr este determinat de numărul (GOS) de variabile controlate, pot avea mai multe (locale) suplimentare. Feedback suplimentar (DOS) conectează ieșirea unuia sau mai multor elemente ale sistemului. ACS care, pe lângă cel principal, au unul sau mai multe feedback-uri suplimentare se numesc multi-loop (Fig. 1.3).
În funcție de natura impactului transmis, feedback-urile sunt împărțite în rigide și flexibile. Feedback-urile rigide funcționează atât în regim staționar, cât și în moduri tranzitorii. Feedback-urile flexibile funcționează numai în moduri tranzitorii. Mijloacele de implementare a feedback-ului dur sunt diverse dispozitive de măsurare - senzori care transmit un semnal către nodul de comparație. Mijloacele de implementare a feedback-urilor flexibile sunt dispozitivele de diferențiere și integrare.
În funcție de efectul asupra sistemului, feedback-urile sunt împărțite în pozitive și negative. Pozitiv dacă semnalul de control la intrare crește odată cu creșterea semnalului de ieșire și negativ dacă semnalul de control la intrare scade odată cu creșterea semnalului de ieșire.
Dezavantajele sistemelor controlate de perturbații pot fi eliminate prin utilizarea sistemelor de control combinat, în care controlul perturbărilor este combinat cu controlul abaterilor. În acest caz, influența asupra procesului de control al perturbației principale este eliminată. În plus, datorită prezenței feedback-ului asupra valorii controlate , efectul perturbațiilor minore este limitat. Uneori, aceste sisteme sunt numite deschis-închis. Au o precizie relativ mare de a menține o anumită valoare controlată.
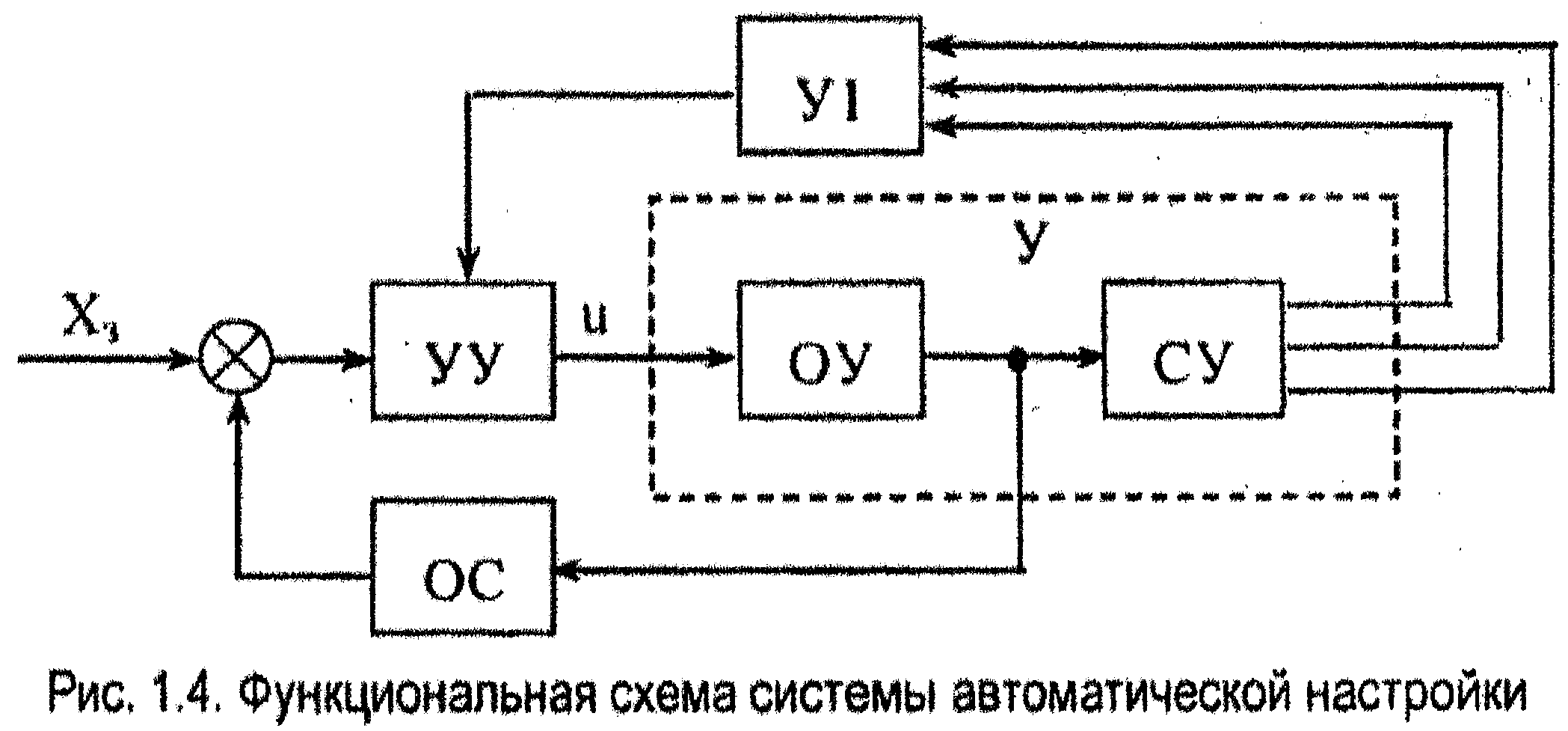
Schema funcțională a sistemului de control, care asigură setarea și selectarea algoritmului de control necesar în funcție de modificarea condițiilor de funcționare și a parametrilor obiectului de control, este prezentată în fig. 1.4.
| Conţinut | 2 | |
| Introducere | 3 | |
| 1. | o parte comună | |
| 1.1. | Noțiuni de bază | 6 |
| 1.2. | Descrierea schemei originale de control automat | 9 |
| 1.3. | Dezvoltarea unei diagrame funcționale a ATS | 13 |
| 2. | Partea de decontare | |
| 2.1. | Sinteza parametrică și analiza unui ACS cu o singură buclă | 14 |
| 2.1.1. | Evaluarea posibilității controlului static | 15 |
| 2.1.2. | Evaluarea posibilității controlului astatic | 20 |
| 2.1.3. | Studiul calității unui ATS cu o singură buclă | 22 |
| 3. | Dezvoltarea unei bucle de control cu un parametru dat | 25 |
| Concluzie | 27 | |
| Bibliografie | 28 |
Introducere
Teoria modernă a controlului automat este partea principală a teoriei controlului. Sistemul de control automat constă dintr-un obiect reglabil și comenzi care acționează asupra obiectului atunci când una sau mai multe variabile reglabile se modifică. Sub influența semnalelor de intrare (control sau perturbare), variabilele controlate se modifică. Scopul reglementării este de a forma astfel de legi, conform cărora variabilele reglementate de ieșire ar diferi puțin de valorile cerute. Rezolvarea acestei probleme în multe cazuri este complicată de prezența unor perturbații aleatorii (zgomot). În acest caz, este necesar să se aleagă o astfel de lege de control în care semnalele de control să treacă prin sistem cu distorsiuni reduse, iar semnalele de zgomot să nu fie practic transmise.
Teoria controlului automat a parcurs un drum lung în dezvoltarea sa. În stadiul inițial, au fost create metode de analiză a stabilității, calității și acurateței reglementării continue. sisteme liniare. Apoi metodele de analiză a discretelor și discrete- sisteme continue. Se poate observa că metodele de calcul a sistemelor continue se bazează pe metode de frecvență, iar calculul sistemelor discrete și discrete-continue se bazează pe metode de transformare z.
În prezent, se dezvoltă metode de analiză a sistemelor de control automat neliniar. Încălcarea principiului suprapunerii în sistemele neliniare, prezența unui număr de regimuri alternative (în funcție de impact) de mișcări stabile, instabile și auto-oscilații complică analiza acestora. Proiectantul întâmpină dificultăți și mai mari atunci când calculează sisteme de control extreme și auto-ajustabile.
Atât teoria controlului automat, cât și teoria controlului sunt incluse în știință sub denumirea generală de „cibernetică tehnică”, care a primit acum o dezvoltare semnificativă. Cibernetica tehnică studiază tiparele generale ale complexului sisteme dinamice tehnologice şi Procese de producție. Cibernetica tehnică, controlul automat și reglarea automată se dezvoltă în două direcții principale: prima este asociată cu progresul și îmbunătățirea constantă în proiectarea elementelor și a tehnologiei de fabricare a acestora; al doilea - cu utilizarea cea mai rațională a acestor elemente sau a grupurilor lor, care este sarcina de a proiecta sisteme.
Proiectarea sistemelor automate de control poate fi realizată în două moduri: prin metoda analizei, când, cu o structură de sistem preselectată (prin calcul sau modelare), se determină parametrii acesteia;
metoda de sinteză, când, conform cerințelor, sistemul este imediat selectat
cea mai bună structură și parametri ai acesteia. Ambele metode sunt pe scară largă uz practicși, prin urmare, sunt acoperite pe deplin în această carte.
Determinarea parametrilor sistemului, atunci când structura și cerințele acestuia pentru întregul sistem sunt cunoscute, se referă la problema sintezei. Soluția la această problemă cu un obiect de control liniar poate fi găsită folosind, de exemplu, metodele frecvenței, metoda locului rădăcinii sau studiind traiectoriile rădăcinilor ecuației caracteristice a unui sistem închis. Selectarea unui dispozitiv corector prin sinteză în sala de clasă funcții raționale fracționale variabilă complexă poate fi realizată folosind metode grafico-analitice. Aceleași metode fac posibilă sintetizarea dispozitivelor corective care suprimă modurile periodice auto-oscilante și instabile în sistemele neliniare.
Metodele de sinteză au fost dezvoltate în continuare pe baza principiilor programării maxime și dinamice, atunci când se determină legea optimă de control din punctul de vedere al unui criteriu de calitate dat, care asigură limita superioară a calității sistemului, care trebuie să fie pentru care s-a străduit atunci când îl proiectăm. Cu toate acestea, soluția acestei probleme practic nu este întotdeauna posibilă din cauza complexității descrierii matematice a proceselor fizice din sistem, a imposibilității de rezolvare a problemei de optimizare în sine și a dificultăților în implementarea tehnică a legii de control neliniar găsite. Trebuie remarcat faptul că implementarea legilor complexe de control este posibilă numai atunci când un computer digital este inclus în bucla de sistem. Crearea de sisteme extreme și auto-ajustabile este, de asemenea, asociată cu utilizarea computerelor analogice sau digitale.
Formarea sistemelor de control automat, de regulă, se realizează pe baza metodelor analitice de analiză sau sinteză. În această etapă de proiectare a sistemelor de control, pe baza ipotezelor acceptate, se întocmește un model matematic al sistemului și se selectează structura preliminară a acestuia. În funcție de tipul de model (liniar sau neliniar), se alege o metodă de calcul pentru a determina parametrii care asigură indicatorii specificați de stabilitate, precizie și calitate. După aceea, modelul matematic este rafinat și, folosind mijloacele modelare matematică determina procesele dinamice din sistem. Sub acțiunea diferitelor semnale de intrare se iau caracteristicile de frecvență și se compară cu cele calculate. Apoi se stabilesc în final marjele de stabilitate ale sistemului în fază și modul și se găsesc principalii indicatori de calitate.
Mai mult, stabilirea acțiunilor tipice de control asupra modelului; elimina caracteristicile de precizie. Pe baza modelării matematice se întocmesc cerințele tehnice pentru echipamentul sistemului. Un controler este asamblat din echipamentul fabricat și transferat la modelarea seminaturală, în care obiectul de control este colectat sub forma unui model matematic.
În funcție de caracteristicile obținute în urma modelării HIL, se ia o decizie cu privire la adecvarea controlorului de a lucra cu un obiect real de reglementare. Selecția finală a parametrilor controlerului și reglarea acestuia se efectuează în condiții naturale în timpul dezvoltării experimentale a sistemului de control.
Dezvoltarea teoriei controlului automat bazat pe ecuațiile de stare și transformările z, principiul maximului și metoda de programare dinamică îmbunătățește metoda de proiectare a sistemelor de control și vă permite să creați sisteme automate extrem de eficiente pentru cel mai mult diverse industrii Economie nationala. Sistemele de control automat obtinute in acest fel asigura calitatea inalta a produselor, reduc costurile acestora si cresc productivitatea muncii.
1. Partea generală.
1.1. Noțiuni de bază
Conversie de intrare a sistemului (acțiune de control)în semnalul de ieșire (valoare reglabila) determină legea modificării valorii reglementate. Realizarea doritului legea este implementată ca urmare formare variabile de control, care afectează sistemul controlat. Legile de modificare în timp a valorii reglementate pot fi diferite; matematic sunt descrise operator de sistem. Acest operator poate realiza dependența proporțională a semnalului de ieșire de intrare, relația sub formă de derivată sau integrală etc. Într-un caz mai general, acest operator poate fi și neliniar.
Trebuie remarcat faptul că legile de modificare a valorilor controlate în mașini și unități sunt încălcate sub influența influențelor externe și uneori interne, numite perturbații. (sau influențe perturbatoare). Din definirea acestor influente se poate observa ca sistemul de control automat trebuie sa reproduca cat mai exact actiunea de control si sa raspunda cat mai putin la actiunea perturbatoare.
Se află trei diverse principii construirea unor sisteme de control care să asigure implementarea legii impuse de modificare a variabilei controlate: buclă deschisă, buclă închisă, buclă combinată regulament (închis-deschis). Principiul unui ciclu deschis este de a asigura legea necesară de schimbare a variabilei controlate direct prin conversia acțiunii de control. Principiul unui ciclu închis se caracterizează printr-o comparație a acțiunii de control cu modificarea reală a variabilei controlate datorită aplicării părereși element de comparație. Semnalul de eroare rezultat în urma comparației nu trebuie să depășească o anumită valoare predeterminată. Datorită acestui fapt, legea necesară de modificare a variabilei controlate este asigurată în sistemele închise. Principiul combinat constă în combinarea buclelor închise și deschise într-un singur sistem.
Control automat numit procesul în care
operațiunile sunt efectuate de un sistem care funcționează fără intervenția umană în conformitate cu un algoritm predeterminat.
Un sistem automat cu un circuit închis de influență, în care acțiunea de control (reglare) este generată ca urmare a comparării adevăratei valori a mărimii controlate (reglabile) cu valoarea ei dată (prescrisă), se numește ASR.
Proces de fabricație- un ansamblu de procese de muncă și tehnologice interdependente, în timpul cărora materiile prime și semifabricate sunt transformate în produse finite.
Automat sunt dispozitivele care controlează diverse proceseși controlați-le fără intervenția umană directă.
Subiectul sau procesul de studiat se numește obiect,și toate obiectele din jur care interacționează cu ele - Mediul extern.
Sistem- un ansamblu de elemente sau dispozitive care se află în relații și conexiuni între ele și formează o anumită integritate (unitate).
Obiect de control- un ansamblu de dispozitive tehnologice (masini, scule, mecanizare) care realizeaza acest proces din punct de vedere al managementului.
Operare de control- asigură la momentul potrivit începerea, succesiunea și încetarea operațiunilor de lucru, alocă resursele necesare implementării acestora.
Sub managementînțelegerea procesului de organizare a unui astfel de impact intenționat asupra obiectului de control, în urma căruia acesta din urmă intră în starea necesară (intenționată).
Parametrii unui proces de producție sau a unui proces sau a unui obiect de proces care trebuie menținut sau modificat în mod constant conform unei anumite legi se numesc cantitate controlată.
Se numește valoarea variabilei controlate, care, conform sarcinii, ar trebui să fie la un moment dat valoarea dată a variabilei controlate (parametru controlat).
Este numită o diagramă care ilustrează secvența proceselor dintr-un dispozitiv sau sistem diagrama structurala.
Legătură- un element inclus în ACS în care parametrul de intrare este convertit într-un anumit mod în parametrul de ieșire (este reprezentat schematic ca un bloc, dar nu reflectă caracteristicile designului său).
Informația este întotdeauna asociată cu un purtător material de o anumită cantitate fizică. LA sisteme tehnice se numesc astfel de transportatori purtători de semnal(de exemplu, tensiuni și curent electric, presiune, mișcare mecanică etc.), care pot fi modificate în conformitate cu informațiile transmise.
1.2. Descrierea schemei originale de control automat.
Deoarece obiectul reglementat este un element sau o legătură a ACP, proprietățile ACP depind în primul rând de proprietățile obiectului reglementat. Prin urmare, pentru a crea un ACP viabil care să ofere calitatea necesară a reglementării, este necesar, în primul rând, să se cunoască proprietățile obiectului reglementat (spastic și dinamic).
Obiectul de reglementare al standului de laborator este un obiect cu parametri repartizați, întrucât valoarea controlată (temperatura) nu este aceeași în diferite puncte ale obiectului atât în starea de echilibru, cât și în modul de tranziție.
Pentru a crește inerția obiectului, care ar trebui să fie de zece ori mai mare decât cea măsurată în acest obiect de către senzor, este prevăzută o cană metalică umplută cu așchii, în care se află senzorul de temperatură. Acest lucru vă permite să creșteți volumul de căldură al obiectului.
Temperatura necesară (de referință) este setată de dispozitiv la intrarea regulatorului-setter (t e).
Perturbare
Orez. 1. Schema de reglementare.
Temperatura reală este convertită într-un semnal de către dispozitivul t f. Notând semnalele la ieșirea acestor dispozitive cu litere asemănătoare acestora, exprimăm abaterea efectivă de la cea cerută sub forma unui semnal: ∆t = t e - t f; numită abatere sau nepotrivire. Controlerul convertește ∆t conform unei anumite legi de control și pornește actuatorul. În cazul nostru, sarcina regulatorului este lichiditatea abaterilor ∆t cauzate de acțiunea perturbațiilor B, adică. diferite sarcini asupra obiectelor de control (modificări ale temperaturii ambiante, modificări ale poziției porții etc.).
O eroare ∆t poate apărea și din cauza unei modificări a t e, dar deoarece este o funcție cunoscută în prealabil, eroarea poate fi, de asemenea, calculată în avans și compensată. Un astfel de sistem se numește sistem de control al programului sau pur și simplu ACS.
Standul oferă reglare în două poziții. În acest caz, este necesar să deschideți clapeta, astfel încât elementul de încălzire electric să fie suflat constant de aer. Temperatura este controlată prin pornirea sau oprirea elementului de încălzire de către elementul releu.
Pentru a determina proprietățile dinamice ale obiectului, în suport este instalat un dispozitiv de auto-înregistrare, care înregistrează schimbările de temperatură ale obiectului și le fixează pe o bandă de diagramă.
Orice unitate tehnologica care face obiectul reglementarii blocului operator functioneaza in regim de echilibru daca bilantul material si energetic este pe deplin respectat in ea. Principalul parametru care caracterizează condițiile de derulare a procesului tehnologic (în obiectul nostru este temperatura) rămâne neschimbat în starea staționară.
Dependența valorii de ieșire de valoarea de intrare în regim de echilibru se numește caracteristica statică a OR. Caracteristicile statice pot fi atât liniare, cu coeficienți de pantă diferiți, cât și neliniare, în timp ce majoritatea obiectelor reale în general au cele neliniare.
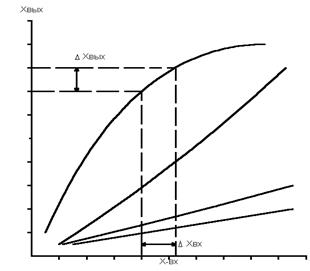
Fig 1.1. Caracteristicile statice ale OR.
Aceste caracteristici ale operatorului operator fac posibilă evaluarea gradului de conexiune dintre diferitele valori de intrare și ieșire ale obiectului.
Caracteristicile statice sunt determinate prin calcul sau experimental.
Caracteristica dinamică a obiectului reglementat se numește dependența valorii de ieșire de valoarea de intrare în modul tranzitoriu.
Deoarece modificările valorii de ieșire a RR sub diferite perturbații pot avea loc în moduri diferite, influențele externe tipice sunt de obicei folosite pentru a studia caracteristicile dinamice ale unui obiect.
Curba de accelerație a temperaturii ACS (Fig. 1.2.) indică proprietățile dinamice ale OR.
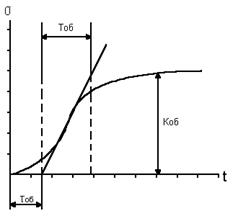
Fig 1.2. Curba de accelerație
Figura arată că obiectul are capacitatea de a opri treptat abaterea valorii de ieșire de la valoarea inițială și starea de echilibru este restabilită, adică. obiectul are proprietatea de auto-aliniere. Astfel de obiecte se numesc statice.
Obiectul are o întârziere T aproximativ, și de atunci Nu este semnificativ și va fi neglijat în cele ce urmează.
Constanta de timp a obiectului T despre este timpul condiționat în care valoarea de ieșire s-ar schimba de la valoarea inițială la o nouă valoare de stare staționară dacă această modificare s-ar produce la o rată constantă și maximă pentru un anumit tranzitoriu. Constanta de timp caracterizează inerția unui obiect, care este înțeleasă ca capacitatea acestuia de a acumula și consuma încet materie și energie, ceea ce devine posibil datorită prezenței rezistențelor și capacităților în sala operatoria care împiedică intrarea și ieșirea lor.
Coeficientul de transfer K despre OR este o modificare a valorii de ieșire a obiectului în timpul tranziției de la starea inițială la starea nouă la starea staționară, referită la o singură perturbare la intrare.
O singură perturbare este considerată o modificare de un procent în valoarea de intrare a obiectului (deplasarea organismului de reglementare).
În acest fel:

Unde x o este valoarea mărimii de ieșire în starea staționară inițială; X(∞)– de asemenea, dar pentru o nouă stare de echilibru; ∆Х în este magnitudinea perturbației introduse; % cursa regulatorului.
1.3. Dezvoltarea unei diagrame funcționale a ATS.
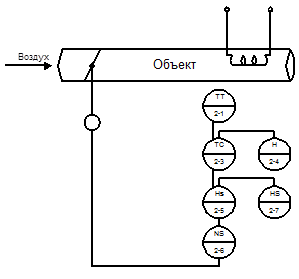
Figura 2. Bucla de control cu trei poziții.
Obiectul reglementării este static în caracteristicile sale cu auto-aliniere cu întârziere de transfer, ceea ce a contribuit la alegerea unui controler proporțional-integral.
Circuitul include măsurarea temperaturii lichidului de răcire și compararea cu sarcina, regulatorul prin HS - unitatea de comandă manuală, pornește contactul „mai mult” sau „mai puțin” demaror fără contact NS, care la rândul său controlează actuatorul, adică. alimentarea cu aer a lichidului de răcire.
Cu reglarea în două poziții, elementul releu reglează includerea lichidului de răcire.
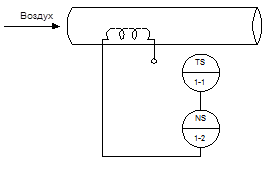
Figura 3. Bucla de control cu două poziții.
Când se atinge o anumită temperatură, demarorul oprește alimentarea cu tensiune a elementului de încălzire electric. Măsurarea și reglarea temperaturii se realizează cu ajutorul unui senzor dinamometric - un releu de temperatură.
2. Partea de decontare.
2.1. Sinteza parametrică și analiza ACS cu o singură buclă.
Analiza sistemelor automate de control cu elemente de electroautomatică se realizează folosind criteriile algebrice ale lui Gauss și Hurwitz, criteriul Lyapunov, criteriile de frecvență ale lui Mikhailov, Nyquist - Mikhailov etc.
Atunci când se analizează ACS, se studiază problemele de stabilitate și alți indicatori calitativi ai ACS deschis și închis, se găsesc marjele de stabilitate în modul și fază, se determină atatismul sistemelor închise, ratele de eroare pentru servosisteme etc.
Principalii indicatori calitativi ai sistemelor, care sunt determinați după găsirea așa-numitelor funcții h, includ următorii:
1. Timpul procesului tranzitoriu t p, după care valoarea controlată va rămâne apropiată de valoarea constantă;
2. Valoarea constantă a variabilei controlate h¥=limh(t)=h y ;
3.Depășirea maximă y=(h max -h y)/h y (aici h max este valoarea primului maxim);
4. Frecvența de oscilație w=2p/T (aici T este perioada de oscilație);
5. Numărul de oscilații ale procesului tranzitoriu n;
6.Timp pentru atingerea primului t max maxim;
Un indicator important al calității ACS este fiabilitatea acestora. Indicatorii calitativi se determină prin rezolvare ecuatii diferentiale, care descriu structuri ACS deja cunoscute.
Sinteza ACS constă în găsirea structurilor și parametrilor acestuia care să corespundă indicatorilor de calitate dați. Sinteza este o sarcină mai dificilă decât analiza. Principalele metode utilizate în sinteza ACS sunt analitice, grafico-analitice și mașină (cu ajutorul computerelor).
2.1.1. Evaluarea posibilității de reglare statică.
La alegerea unui controler, este necesar să se cunoască informațiile dinamice numerice despre obiectul reglementării, adică. K0; T despre;t 0 , pe care o determinăm prin caracteristica de accelerație.
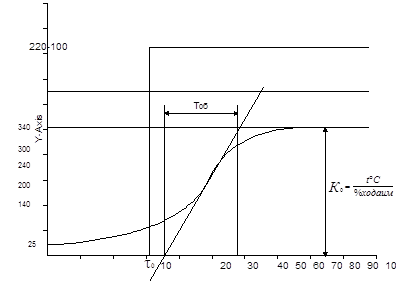
Fig. 4. Curba de accelerare a temperaturii ACS a standului de laborator.
Tipul de regulator este ales provizoriu în raport cu t/T aproximativ;
Criterii de selectare a autorităţilor de reglementare după tipul de acţiune.
Pentru a studia și calcula diagrama structurală a ASR prin intermediul transformărilor echivalente, este necesar să o reduceți la cea mai simplă formă standard a obiectului-regulator. Acest lucru este necesar, în primul rând, pentru a determina funcțiile sale de transfer și, în consecință, dependențele matematice care determină procesele tranzitorii din sistem și, în al doilea rând, de regulă, toate metodele de inginerie pentru calcularea și determinarea setărilor controlerelor sunt aplicate unor astfel de structuri standard.
Deci, schema bloc originală a temperaturii ACS conform unei diagrame funcționale tipice (vezi desene) poate fi reprezentată așa cum se arată în figură.
Unde W P (p), W IM (p), W PO (p), W OP (p), W IU (p), sunt funcțiile de transfer ale controlerului, actuatorului, organismului de reglementare, obiectului de control și, respectiv, dispozitivului de măsurare .
Pe diagrama structurală, toate influențele (semnalele) ar trebui să fie indicate în forma transformată Laplace.
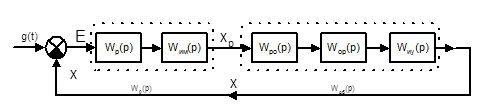
Figura 5. Diagrama bloc transformată a ACS (t).
Toate legăturile care determină proprietățile dinamice ale nodurilor de interfață (conexiuni, interconexiuni) ale unui obiect cu un regulator (de exemplu, organisme de reglementare, linii de comunicație, dispozitive de măsurare, senzori etc.), este recomandabil, de regulă, să se facă referire la obiectul reglementării.
Dacă controlerul și actuatorul implementează direct legea de control în sistem, atunci funcția de transfer a controlerului
W P (p) \u003d W y (p) W IM (p)
Reglarea statică este caracterizată prin prezența unui P-regulator, atunci
W P (p) \u003d K reg
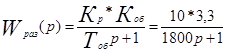
La optimizarea valorilor, conform datelor experimentale, este recomandabil să se ia K - coeficientul regulatorului să ia K = 10
Funcția de transfer a obiectului reglementat, ținând cont de legăturile legate de obiectul însuși, are forma:
W despre (p) \u003d W PO (p) W OP (p) W IU (p)
În cazul general, orice ACS unidimensional cu feedback-ul principal, prin întărirea treptată a legăturilor, poate fi redus la cea mai simplă formă, funcția de transfer a unui sistem deschis, care
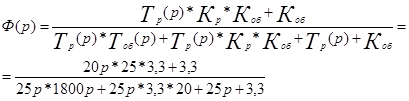
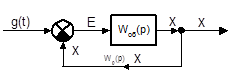 W(p)=W P (p)*W OB (p)
W(p)=W P (p)*W OB (p)
Curba de accelerație ACS de temperatură arată că obiectul este inerțial, static și are o întârziere, deoarece întârzierea este nesemnificativă. În cercetările ulterioare, acestea pot fi neglijate. Apoi funcția de transfer a obiectului va arăta astfel:
W despre (p) \u003d K despre / (T despre p + 1)
Funcția de transfer a unui sistem deschis
W(p)=W P (p)*W OB (p)
 - cu reglare statica.
- cu reglare statica.
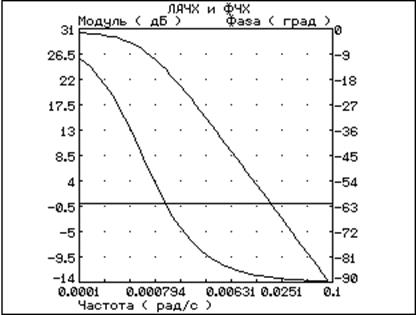
Fig 6. LAFC și LFC pentru obiect.
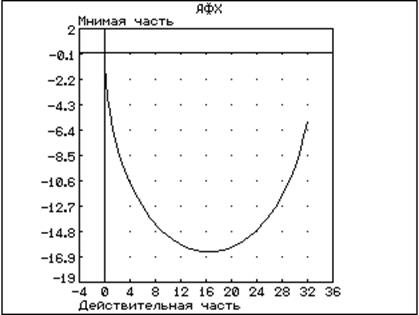
Fig 7. AFC pentru un obiect.
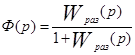
Să găsim funcția de transfer a sistemului închis:
pentru că se determină valoarea constantelor de timp caracteristici de proiectare elemente ale sistemului, atunci reglarea sistemului de control se realizează numai prin modificarea coeficientului K al acestuia prin influențarea coeficientului de transfer K p al controlerului.
Pentru a determina stabilitatea sistemului, construim caracteristicile amplitudine-frecvență, fază-frecvență pe o scară logaritmică și construim un hodograf folosind un sistem închis.
![]()
Fig. 8. LAHCH și LPCH cu reglare statică.
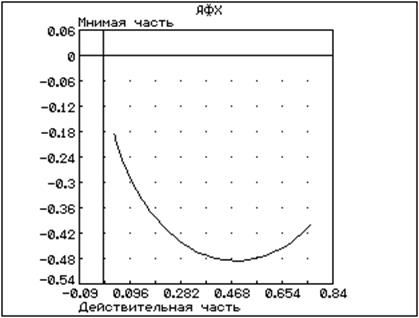
Figura 9. Caracteristica amplitudine-fază a unui sistem închis.
Conform graficelor, vedem că cu coeficientul regulatorului K p = 10 se îndeplinește marja de stabilitate, deoarece la frecvența de tăiere wav, faza este mai mică de 180°, ceea ce caracterizează stabilitatea sistemului sub control static, ceea ce înseamnă că este posibil să se utilizeze un controler P pentru temperatură ACS.
2.1.2. Evaluarea posibilității de reglare astatică.
Unul dintre semnele unei legături astatice (sau a sistemului în ansamblu) este prezența unei variabile complexe P ca factor în numitorul funcției de transfer, i.e. prezenţa unei componente integratoare.
Să luăm în considerare posibilitatea unei legi PI pentru controlul ACS a temperaturii. Pentru a face acest lucru, vom construi o diagramă bloc în care vom include un controler PI.
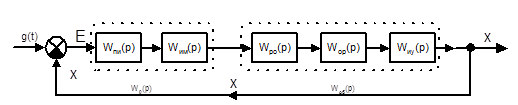
Figura 10. Schema structurala Temperatura SAR.
Funcția de transfer a controlerului PI are forma
W P (p)=K+1/Tp; (K=20; Tu=25 sec.)
Să găsim funcția de transfer a unui sistem deschis
W ori (p) \u003d W p (p) W aproximativ (p)
Găsiți funcția de transfer a unui sistem închis
Pe baza funcției de transfer a sistemului deschis, construim LFC și LFC, iar funcția sistemului închis, construim AFC.
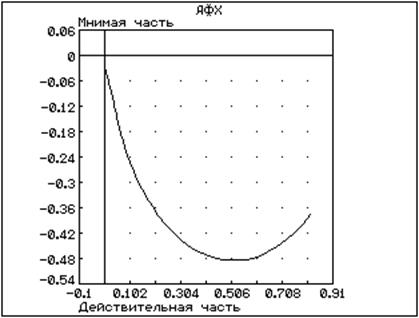
Figura 11. Caracteristica amplitudine-fază a unui sistem închis.
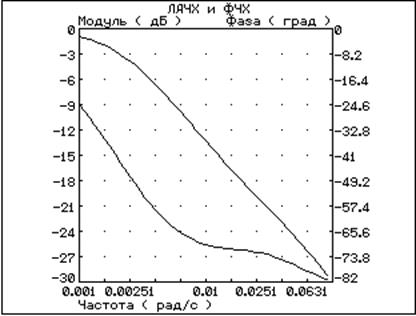
Figura 12. LAFC și LPFC cu reglare astatică.
Caracteristicile frecvenței arată că sistemul are o marjă de stabilitate, atât în amplitudine, cât și în fază, deoarece la frecvența de tăiere w faza medie< 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Investigarea calității unui sistem de control automat cu un singur circuit.
La sisteme automate reglementarea impune cerințe nu numai asupra durabilității sale. Pentru performanța sistemului, nu este mai puțin necesar ca procesul de control automat la anumiți indicatori de calitate.
Cerințele privind calitatea procesului de reglementare în fiecare caz pot fi foarte diverse, cu toate acestea, dintre toți indicatorii de calitate, se pot distinge câțiva dintre cei mai semnificativi, care determină calitatea aproape tuturor ACP-urilor cu suficientă completitudine.
Calitatea procesului de reglare a sistemului, de regulă, este evaluată prin funcția sa de tranziție.
Principalii indicatori de calitate sunt: - timpul de reglare t p - este timpul în care, începând din momentul aplicării impactului asupra sistemului, abaterile valorii controlate Dh(t) de la valoarea ei de echilibru h 0 =h( ¥) va fi mai mică decât valoarea prestabilită E Se presupune, de obicei, că, după expirarea timpului de reglare, abaterea valorii reglate de la valoarea staționară nu trebuie să fie mai mare de E = 5%. Astfel, timpul de reglare determină durata (viteza) procesului tranzitoriu.
Depășirea s este abaterea maximă Dh max a variabilei controlate față de valoarea constantă, exprimată ca procent de h 0 =h(¥).
Valoarea absolută a Dh max este determinată din curba tranzitorie:
Dh max \u003d h max - h (¥)
În consecință, depășirea va fi egală cu:
Oscilația sistemului se caracterizează prin numărul de oscilații ale valorii controlate în timpul de reglare t p. Daca in acest timp procesul tranzitoriu din sistem face ca numarul de oscilatii sa fie mai mic decat cel specificat, atunci se considera ca sistemul are calitatea ceruta de reglare in ceea ce priveste oscilatia sa;
Eroare constantă E. Valoarea constantă a variabilei controlate h 0 la sfârşitul procesului tranzitoriu depinde de astaticismul n al sistemului. LA sisteme statice(n=0) – eroare la starea de echilibru la valoare constantă acțiunea de intrare nu este egală cu 0 și, prin urmare, valoarea constantă a variabilei controlate h 0 va diferi de valoarea ei setată prin valoarea erorii la starea de echilibru.
Pentru canalul influenței perturbatoare, valoarea erorii este determinată de expresie
![]()
unde x 0 este o forță motrice constantă; K este coeficientul de transfer al sistemului.
Prin canalul influenței perturbatoare, valoarea erorii conform expresiei
unde f 0 este o acțiune perturbatoare constantă; K despre - coeficientul de transfer al obiectului reglementat; K p - coeficientul de transfer al regulatorului.
Comparând funcțiile tranzitorii ale controlului static și astatic, alegem regulatorul optim pentru temperatură ACS.
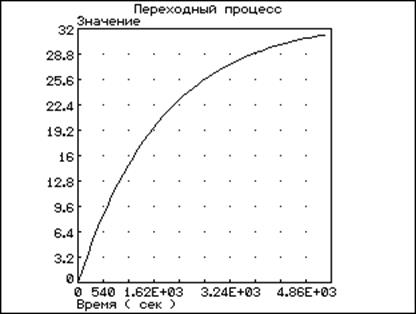
Fig. 13. Funcția tranzitorie a ACS cu P-regulator
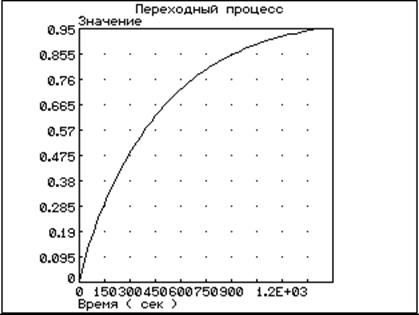
Figura 14. Funcția tranzitorie ACS cu controler PI
Graficele arată că timpul de reglare cu un regulator PI este mai scurt decât cu un regulator P; înseamnă că pentru ACS de temperatură este oportun să se utilizeze un controler de impuls care îndeplinește legea de reglare PI.
Pentru calcule s-a folosit programul Classic pe un computer.
3. Dezvoltarea unei scheme de buclă de control pentru un parametru dat.
Schemele sunt realizate în conformitate cu GOST 2.710-81.
Figura 15. Bucla de control cu trei poziții.
Alimentarea cu energie a standului de laborator se realizează prin schema de alimentare automată SF1 Nr. 003E3. În acest caz, elementul de încălzire al obiectului de control este pornit prin contactul de deschidere KM 1.1. releul KM 1 și un dispozitiv secundar de auto-înregistrare KSU 4. În poziția de 90 ° a comutatorului universal SA1, motorul ventilatorului. In pozitia -45°, comutatorul SA1, este inclus in reglarea pozitionala, in pozitia +45° - reglare in trei pozitii.
Cu reglarea în 2 poziții, înfășurarea releului KM1 este pornită prin contactul de deschidere al senzorului TUDE1. Când temperatura setată pe senzor este depășită, contactul acestuia se deschide și deschide contactul KM1.1, oprind elementul de încălzire, ceea ce este indicat de lampa de semnalizare HL4.
Reglarea cu trei poziții este prezentată în diagrama nr. 004E2. În modul automat, semnalul electric de la convertorul termic TSMU este alimentat secvenţial mai întâi la intrarea dispozitivului KSU4(2), borna 12 şi prin borna 11 intră în intrarea 25 a unităţii de control RBI 1-P.
Un semnal de curent proporțional cu valoarea setată a temperaturii este de asemenea furnizat către intrarea clemei 21 RBI 1-P de la setatorul RZD.
La ieșirea regulatorului, bornele 7 și 9 dau semnalul „Mai puțin” și, respectiv, „Mai mult”, în raport cu punctul central al clemei 10. Semnalul trece prin BRU și contactele de deschidere SQ1 și SQ2 ale IM. actuator, care controlează demarorul FBR, bornele 7 și 9. FBR pornește contactele IM 1, 2 și 3.
În modul de control manual, IM este trecut de butoanele BRU „Mai mult” sau „Mai puțin”.
Concluzie
Pentru sistemul de calcul al obiectului s-au efectuat următoarele calcule:
Elaborarea unei scheme funcționale de control automat. Se obțin funcția de transfer și transformarea structurală a schemei obiectului de control. Sunt construite caracteristicile de frecvență ale obiectului de control. S-a făcut o evaluare a capacităților unui obiect de control static (controller P), precum și o evaluare a posibilității unui obiect de control astatic (controller PI). S-a realizat un studiu asupra calității unui sistem de control automat cu o singură buclă.
Construcția caracteristicilor de frecvență dorite ale sistemului corectat a fost finalizată. Se efectuează selecția și calculul dispozitivului corector. A fost evaluată calitatea sistemului ajustat.
Dezvoltarea unei scheme de buclă de control pentru un parametru dat a fost finalizată.
Pe baza calculelor, putem spune că selectarea dispozitivului corector s-a făcut corect și îndeplinește indicatorii de calitate ai sistemului cu corecția efectuată.
Bibliografie.
- I.Yu. Topchev „Atlas pentru proiectarea CAP”
- B.C. Chistyakov „Un scurt ghid pentru măsurători de inginerie termică”
- N.N. Ivașcenko" Reglare automată»
4. V.V. Cherenkov „Dispozitive industriale și mijloace de automatizare”
Vă sfătuim să citiți
 Caracteristicile psihologice ale copiilor în adolescență
Caracteristicile psihologice ale copiilor în adolescență Transferarea unui copil la o altă școală - procedura și documentele necesare Dacă se transferă un copil la o altă școală
Transferarea unui copil la o altă școală - procedura și documentele necesare Dacă se transferă un copil la o altă școală, diagnostic, tratament Tratamentul chlamydia urogenitală") Chlamydia urogenitală - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenitală
Chlamydia urogenitală - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenitală Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce
Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce

