Systemklassifisering automatisk regulering
Automatiske kontrollsystemer som brukes i moderne teknologi, er ganske varierte. Rask ekspansjon funksjonelt formål funksjonelle formål med automatiske systemer, som ble mulig, spesielt på grunn av introduksjonen av datateknologi, øker antallet realiserte klasser av systemer. Under disse forholdene er det nesten umulig å gi en fullstendig detaljert klassifisering av automatiske kontrollsystemer. Klassifikasjoner som har blitt brukt med hell i den siste tiden, blir nå for snevre, og dekker ikke nye systemer som utvikles og implementeres.
Enhver klassifisering er basert på visse klassifiseringsfunksjoner. Fra synspunktet om generaliteten til klassifiseringen av automatiske kontrollsystemer, er den mest praktiske klassifiseringsfunksjonen informasjonen som brukes om reguleringsobjektet. Det skal bemerkes at nesten alle automatiske systemer er ikke-lineære enheter som inneholder både variabler og distribuerte parametere, der verdien av variablene på et gitt tidspunkt kan avhenge ikke bare av gjeldende, men også av tidligere verdier av disse variablene.
Hvert automatisk system er preget av en fungerende algoritme - et sett med resepter som bestemmer arten av endringen i den kontrollerte variabelen avhengig av virkningen
Avhengig av arten av endringen i komponentene i kjørepåvirkningen, er automatiske systemer delt inn i fire klasser:
- automatiske stabiliseringssystemer, der hovedhandlingen er konstant verdi, og den kontrollerte verdien opprettholdes automatisk uendret med en vilkårlig endring i belastningen og ytre forhold. Belastningen til det regulerte objektet (lastmoment på motorakselen, generatorbelastning) i stabiliseringssystemer er vanligvis den viktigste forstyrrende effekten som påvirker den kontrollerte verdien skarpest;
- systemer for programmert regulering, der drivkraften og den regulerte verdien endres i henhold til en forhåndsbestemt lov. Et automatisk programvaresystem kan betraktes som et stabiliseringssystem, der stabiliseringsoppgaven er komplisert av oppgaven med å endre den kontrollerte variabelen i henhold til et gitt program. Endring av den kontrollerte verdien i henhold til programmet oppnås ved å legge til systemet et element av en programvareenhet som endrer innstillingshandlingen i tide i henhold til en forhåndsbestemt lov;
- servosystemer innebærer å endre den kontrollerte variabelen i samsvar med endringen i drivkraften, hvis endringslov er en ukjent funksjon. Dermed reproduserer servosystemet, i likhet med programvaresystemet, masterhandlingen. Denne effekten i sporingssystemet endres imidlertid ikke i henhold til et forhåndsbestemt program, men vilkårlig. For eksempel snur radarantennen for å følge flyet, hvis bane ikke er kjent på forhånd, dvs. "følger" det. Det er her navnesporingssystemet kommer fra. Mesterpåvirkningene og kontrollerte verdiene til servosystemer kan ha en mangfoldig karakter i deres fysiske natur. Dessuten kan den kontrollerte verdien av sin fysiske natur avvike fra innstillingshandlingen.
-
optimale styringssystemer gir optimalt vedlikehold av den regulerte verdien etter et eller annet optimalitetskriterium
Avhengig av hvilken matematisk modell som beskriver prosessene i automatiske systemer, er de delt inn i:
- lineære automatiske systemer, hvor den matematiske modellen er sammensatt av lineære eller lineariserte differensialligninger. Hvis det i ligningen av dynamikk for en hvilken som helst kobling til et lineært automatisk system er minst en eller flere tidsvariable koeffisienter, oppnås et lineært automatisk system med variable parametere. Hvis en kobling er beskrevet av lineære partielle differensialligninger, vil det automatiske systemet være et lineært automatisk system med distribuerte parametere. I kontrast er et vanlig lineært automatisk system et automatisk system med klumpede parametere. Hvis dynamikken til en hvilken som helst kobling i det automatiske systemet er beskrevet lineær ligning med et forsinket argument, kalles det automatiske systemet et lineært automatisk system med forsinkelse;
- ikke-lineære automatiske systemer, den matematiske modellen er sammensatt av ikke-lineære differensiallikninger. Ikke-lineære automatiske systemer inkluderer alle automatiske systemer, i lenkene til hvilke det er statiske egenskaper for noen av de mange typene ikke-linearitet. Ikke-lineære kan være automatiske systemer med variable parametere, med distribuerte parametere, med forsinkelse, impuls og digitale automatiske systemer, hvis lineariteten til dynamikkligningen brytes et sted i dem.
Klassifisering av automatiske kontrollsystemer
Hvert automatisk system består av et antall lenker, sammenkoblet på en hensiktsmessig måte. Hver enkelt lenke har en input og output som bestemmer virkningen og overføringen av informasjon fra en lenke til en annen. PÅ generell sak enhver kobling kan ha flere innganger og utganger. Inngangs- og utgangsmengdene kan være av hvilken som helst fysisk art.
Under driften av det automatiske systemet endres inngangs- og utgangsverdiene over tid. Dynamikken i signalkonverteringsprosessen i denne lenken er beskrevet av en ligning som relaterer utgangsvariabelen til inngangsvariabelen. Settet med ligninger og karakteristika for alle lenker beskriver dynamikken til kontroll- eller reguleringsprosesser i hele systemet som helhet.
Hovedtrekkene ved inndelingen av automatiske systemer i store klasser i henhold til arten av interne dynamiske prosesser er følgende:
- kontinuitet eller diskretitet av dynamiske prosesser i tid;
- linearitet eller ikke-linearitet av ligningene som beskriver dynamikken i kontrollprosesser.
Avhengig av arten av endringen i kontrollsignaler, er automatiske systemer delt inn i tre klasser:
- kontinuerlige (analoge) systemer, som er beskrevet av vanlige differensialligninger og i prosessen med regulering forblir strukturen til alle forbindelser i systemet uendret. Signaler ved utgangen av individuelle lenker i et slikt system er kontinuerlige funksjoner av påvirkninger og tid. Det er en kontinuerlig funksjonell forbindelse mellom leddene ved inn- og utgang på det automatiske systemet. I dette tilfellet kan loven om endring i utgangsverdien i tid være vilkårlig, avhengig av formen for endring i inngangsverdien og formen til koblingsdynamikkligningen. For at det automatiske systemet som helhet skal være kontinuerlig, er det først og fremst nødvendig at de statiske egenskapene til alle lenker er kontinuerlige;
- diskrete (digitale) systemer, som er beskrevet av differensial-differanseligninger, og i dem åpnes eller lukkes styrehandlingskretsen med diskrete tidsintervaller. I diskrete systemer utføres åpningen av handlingskretsen med makt og periodisk av spesielle avbrytende enheter. Slike systemer inneholder impulselementer og utfører signalkvantisering både når det gjelder nivå og tid. En kobling som konverterer et kontinuerlig inngangssignal til en sekvens av pulser kalles en pulskobling. Hvis den påfølgende koblingen til det automatiske systemet også er diskret, vil ikke bare utgangen, men også inngangsverdien være diskret. Diskrete automatiske systemer inkluderer automatiske systemer for impulskontroll, samt automatiske systemer for kontrolldatamaskiner. Disse sistnevnte gir resultatet av beregningen ved utgangen diskret, med visse intervaller, i form av tall for individuelle diskrete numeriske verdier av utgangsmengden;
- relé (diskret-kontinuerlige) systemer, som er beskrevet av begge typer ligninger. I disse systemene utføres åpningen eller lukkingen av handlingskretsen av en av koblingene til systemet med en kontinuerlig verdi av inngangshandlingen. Åpning eller lukking utføres ved hjelp av et relé eller en kobling med relékarakteristikk. Reléet utløses ved visse verdier av påvirkninger på dets følsomme organ. Relésystemer utfører kvantisering av signaler i tid. Den statiske karakteristikken til relélenken har knekkpunkter.
Hver av disse tre klassene av automatiske systemer er delt inn i underklasser:
- stasjonære automatiske systemer med klumpede eller distribuerte parametere;
- ikke-stasjonære automatiske systemer med klumpede eller distribuerte parametere.
Ved studie, beregning og syntese av automatiske systemer må det tas i betraktning at teorien og ulike anvendte metoder for vanlige lineære automatiske systemer er mest ferdig utviklet. Derfor, av hensyn til enkel beregning, er det alltid ønskelig å redusere problemet til en slik form for å utnytte metodene for å studere vanlige lineære automatiske systemer maksimalt. Vanligvis blir dynamikkligningene til alle lenker i et automatisk system forsøkt redusert til vanlige lineære, og bare for noen lenker, der dette er uakseptabelt eller hvor en spesiell lineær eller ikke-lineær kobling er spesielt introdusert, er disse spesielle egenskapene er tatt i betraktning.
Dette betyr imidlertid overhodet ikke at man ved prosjektering av nye automatiske systemer bør tilstrebe vanlige lineære automatiske systemer. Tvert imot er det ganske åpenbart at vanlige lineære automatiske systemer har begrensede muligheter. Innføringen av spesielle lineære og ikke-lineære lenker kan gi det automatiske systemet beste kvaliteter. Automatiske systemer med spesielt introduserte ikke-lineariteter og diskrete automatiske systemer, inkludert de med kontrolldatamaskiner og mikroprosessorbaserte automatiske systemer, har spesielt rike muligheter.
I henhold til type og antall signaler er automatiske kontrollsystemer delt inn i:
- enkeltkretssystemer der det er én justerbar verdi;
- flerkretssystemer der det er flere hoved- eller lokale tilbakemeldinger;
- systemer med usammenhengende regulering er ment for regulering av ulike størrelser, er ikke forbundet med hverandre og kan bare samhandle gjennom et felles reguleringsobjekt.
a) i avhengige systemer med inkoherent kontroll, påvirker en endring i en av de kontrollerte variablene endringen i andre. Derfor, i slike systemer, kan ikke reguleringsprosesser betraktes isolert fra hverandre;
b) i uavhengige systemer med usammenhengende kontroll, er endringen i en av de kontrollerte verdiene ikke avhengig av endringen i de andre;
- systemer med tilkoblet regulering antar tilstedeværelsen av flere regulatorer, hvis regulerte verdier har gjensidige forbindelser med hverandre, utført i tillegg til reguleringsobjektet.
Avhengig av tilstedeværelsen eller fraværet av en reguleringsfeil, er ATS delt inn i:
- statiske systemer er slike systemer som antar tilstedeværelsen av en konstant kontrollfeil (droop). karakteristisk trekk arbeid statisk system er at systemets likevekt kan nås når ulike verdier regulert mengde og hver verdi av den regulerte mengde tilsvarer en enkelt verdi av reguleringsorganet;
- astatiske systemer er slike systemer som, for ulike verdier av ytre påvirkning på objektet, er det ingen avvik fra den kontrollerte verdien fra den nødvendige verdien. I slike systemer finner likevektstilstanden sted ved én enkelt verdi av den kontrollerte variabelen lik den gitte, og reguleringsorganet må kunne innta forskjellige posisjoner ved samme verdi av den kontrollerte variabelen.
Prinsipper for automatisk kontroll
Prinsippet for drift av ethvert automatisk kontrollsystem er å oppdage avvik av kontrollerte verdier som karakteriserer driften av det regulerte objektet eller flyten av prosessen fra den nødvendige modusen og samtidig handle på det regulerte objektet eller prosessen på en slik måte at disse avvikene elimineres.
I ledelsesprosessen er det alltid fysiske mengder som må endres på en strengt definert måte.
Automatiske styringssystemer bør, basert på måling av regulerte verdier, danne styringshandlinger på det regulerte objektet. Endring av oppførselen til det regulerte objektet kan utføres i henhold til prinsippene for åpne eller lukkede sykluser.
I et åpent automatisk system kontrollhandlingen dannes på grunnlag av verdien av den angitte verdien. I slike systemer er det ingen sammenheng mellom inngang og utgang. Som et resultat avhenger ikke flyten av kontrollprosessen i åpne systemer av resultatene, det vil si hvordan systemet utfører sine funksjoner. I et åpent automatisk system skjer kun direkte handling: fra operatøren til det regulerte objektet, fra inngangen til utgangen. Det enkleste eksempelet- prosessen med å slå på elektrisk belysning i rommet.
For at den regulerte verdien y(t) til det regulerte objektet skal ta den nødvendige verdien, påføres en inngangshandling x(t) på dets inngang. Men i praksis avviker den kontrollerte verdien y(t) til det regulerte objektet fra den påkrevde verdien av en rekke årsaker. En av disse årsakene er påvirkningen av ulike typer ytre forstyrrende påvirkninger f(t) på reguleringsobjektet. En annen grunn er påvirkningen av å endre parametrene til det regulerte objektet eller andre elementer i systemet, det vil si påvirkningen av parametriske forstyrrelser (forsterkningsfaktorer, tidskonstanter, etc.). Den tredje årsaken til avviket til den kontrollerte variabelen skyldes endringen i den nødvendige verdien til den kontrollerte variabelen (endring i den nødvendige temperaturen til herdeovnen, vilkårlig endring i vinkelkoordinatene til målet). Hvis den nødvendige verdien til den regulerte variabelen endres, er det for en tilsvarende endring i dens faktiske verdi nødvendig å endre kontrollhandlingen h(t) ved inngangen til det regulerte objektet. Når kontrollhandlingen endres ved inngangen til kontrollobjektet, som har treghet, oppstår en forbigående prosess, hvor den kontrollerte verdien ikke vil samsvare med den nødvendige verdien.
Avvik fra den kontrollerte verdien fra den nødvendige verdien kan forekomme ikke bare i forbigående, men også i konstant dynamisk modus, når den nødvendige verdien endres, for eksempel ved konstant hastighet eller konstant akselerasjon. Avviket fra den kontrollerte verdien under påvirkning av de oppførte årsakene kan nå uakseptabelt store verdier, der den tekniske prosessen levert av objektet blir krenket. Derfor oppstår problemet med å redusere avvikene til utgangsverdiene til objekter fra de nødvendige verdiene. Denne oppgaven er hovedoppgaven til ledelsen (regulering).
Det er åpenbart at behovet for en kontrollhandling oppstår i de tilfellene hvor prosessen i reguleringsobjektet avviker fra forskriftene gitt av den fungerende algoritmen.
Kontrollalgoritmen i slike automatiske systemer bestemmes av egenskapene til individuelle lenker eller arten av inngangssignalene. Mange automatiske systemer opererer etter prinsippet om åpen sløyfekontroll, som har en forhåndsbestemt handlingsalgoritme. For eksempel starte en forbrenningsmotor, slå på en kompressor på et lokomotiv, mate sand under hjulsett, prosessen med å lade batteriet osv. For normal funksjon av slike automatiske systemer må en rekke tiltak følges.
I dette systemet kan kontrollhandlingen genereres av en person. Ved å sammenligne de faktiske og nødvendige verdiene til den kontrollerte variabelen, kan en person identifisere avviket mellom dem, og i samsvar med størrelsen og tegnet på dette avviket bestemmes størrelsen på kontrollhandlingen.
For det første kan full samsvar mellom de innstilte og faktiske verdiene til den kontrollerte variabelen bare finne sted hvis egenskapene til de individuelle koblingene til det automatiske systemet er stabile og påvirkning av eksterne forstyrrelser er utelukket.
For det andre må de være nøye innstilt, det vil si at hver posisjon av drivanordningen må strengt tatt samsvare med verdien av den kontrollerte variabelen. Lagre imidlertid innstillingene når delene er slitt eller elementene eldes, samt når temperaturen endres miljø byr på en vanskelig oppgave. Derfor kan ikke åpne sløyfesystemer gi høy kontrollnøyaktighet. De måler ikke resultatet forårsaket av kontrollhandlingen, og gjør ikke handlinger som påvirker dette resultatet slik at det samsvarer med ønsket.
I lukkede automatiske systemer sammenlignes den kontrollerte verdien med dens innstilte verdi, og en kontrollhandling dannes på grunnlag av feilsignalet. Fremdriften til den automatiske kontrollprosessen avhenger av resultatene av denne sammenligningen.
For å implementere en slik kontrollalgoritme, introduseres en forbindelse i utformingen av det automatiske systemet, som kalles tilbakemelding, fordi det overfører et signal fra utgangen til det regulerte objektet til inngangen til det automatiske systemet i motsatt retning av retningen av overføring av kontrollhandlingen til det regulerte objektet.
Den enkleste måten er å plante en menneskelig operatør som vil spille rollen som tilbakemelding, for eksempel i prosessen med manuell kontroll kjøretøy det være seg en bil, en traktor, et lokomotiv, et fly eller et romskip. I dette tilfellet, sammenligne avlesningene kontrollenheter, ved å måle den faktiske verdien av den kontrollerte variabelen (hastighet, kraft, skyvekraft, flyhøyde, etc.), med dens gitte verdi, gjør den menneskelige operatøren en ekstra innvirkning på det kontrollerte objektet for å oppnå minimumsavviket til den kontrollerte variabelen fra den innstilte verdien.
|

På den ene siden er handlingene til en menneskelig operatør elementært enkle, og på den annen side er overvåking av en rekke enheter ganske kjedelig, og kan enkelt utføres av en spesiell automatisk enhet som sammenligner settpunktet og den faktiske verdien til den kontrollerte variabel og danner på grunnlag av det en kontrollhandling på det regulerte objektet. Dermed dukket de første automatiske regulatorene opp, designet for å erstatte det monotone og ineffektive arbeidet til en person med automatisk enhet. En slik enhet er automatisk regulator.
Reguleringsobjektet og den automatiske regulatoren danner et lukket system.
I lukkede automatiske systemer reduseres handlingene til en menneskelig operatør til den første innstillingen av en gitt modus og generell overvåking av prosessene i det automatiske systemet. Nøyaktigheten av regulering i lukkede automatiske systemer, det vil si nøyaktigheten av å opprettholde det nødvendige funksjonelle forholdet mellom inngang og utgang, avhenger hovedsakelig av nøyaktigheten som sammenligningen av den nødvendige og faktiske verdien av den kontrollerte variabelen gjøres med.
Automatiske kontrollsystemer med lukket sløyfe er forskjellige i reguleringsprinsippet:
- ved avvik;
- av indignasjon;
- kombinert.
Automatiske styringssystemer basert på avviksprinsippet, er de viktigste i praksisen med automatisering av ulike produksjonsanlegg. De er preget av tilstedeværelsen av tilbakemelding, som leverer en del av utgangssignalet til inngangen til det automatiske systemet og danner en lukket kontrollsløyfe. Essensen av dette kontrollprinsippet er at den faktiske verdien av den kontrollerte variabelen hele tiden sammenlignes med verdien. h gitt verdi. Hvis det er en forskjell mellom disse verdiene over en forhåndsbestemt terskel, utvikler systemet en regulatorisk handling som tar sikte på å eliminere denne forskjellen eller redusere den til en viss akseptabel verdi.
|

Den nødvendige verdien av den regulerte verdien til det automatiske systemet y(t) bestemmes av drivkraften x(t) som kommer fra drivanordningen. Avviket til den kontrollerte verdien y(t) fra den innstilte verdien kan være forårsaket både av påvirkning av ulike typer forstyrrende påvirkninger, og av en endring i innstillingshandlingen x(t). For å redusere eller eliminere dette avviket, er det nødvendig å utvikle en passende kontrollhandling h(t) og bruke den på inngangen til kontrollobjektet. Kontrollhandlingen ved bruk av avvikskontrollprinsippet genereres som et resultat av å konvertere avviket Dx(t) til den kontrollerte variabelen fra den innstilte verdien.
I automatiske systemer som opererer etter avviksprinsippet, oppnås kontrollhandlingen h(t) som et resultat av transformasjonen av avvikssignalet, og ikke selve faktoren som forårsaket avviket, for eksempel den forstyrrende handlingen f(t). (dvs. som et resultat av transformasjonen av konsekvensen, og ikke årsaken i seg selv), så det kan ikke ha en omvendt effekt på objektet uten forsinkelse sammenlignet med den forstyrrende effekten. Følgelig gjør prinsippet om avvikskontroll det ikke mulig å fullstendig eliminere avviket, dvs. oppnå absolutt invarians.
I automatiske systemer som opererer etter prinsippet om avvik, oppnås kontrollhandlingen som et resultat av transformasjonen av avviket, som kan være forårsaket av forskjellige faktorer. Derfor, i disse systemene, avtar avviket, uavhengig av hvilken av faktorene det er forårsaket av. Siden i automatiske systemer som opererer etter avviksprinsippet, avvikene som oppstår når parametrene til elementene i det automatiske systemet endres også reduseres, vil lukkede automatiske systemer være mindre følsomme for endringer i parametrene til elementene sammenlignet med åpne automatiske systemer , der avvik forårsaket av endringer i parametrene til elementene deres, ikke kompenseres.
Automatiske systemer som opererer i henhold til dette prinsippet har en høy nøyaktighet for å opprettholde den kontrollerte verdien (på grunn av tilstedeværelsen av konstant kontroll av forskjellen mellom innstilte og faktiske verdier), men lav hastighet.
Den lave ytelsen til slike systemer skyldes det faktum at
1. Den lukkede sløyfen for automatisk kontroll, skapt av den automatiske kontrolleren og tilbakemelding, inkluderer reguleringsobjektet. I praksis er reguleringsobjektet nesten alltid det mest treghetsleddet i det automatiske systemet;
2. De reagerer ikke på årsaken som forårsaker misforholdet mellom settpunktet og den faktiske verdien av den kontrollerte variabelen, men på konsekvensen - misforholdet mellom settpunktet og den faktiske verdien av den kontrollerte variabelen.
For å bygge et automatisk kontrollsystem som opererer etter prinsippet om avvik, alt annet likt, kreves en minimumsmengde innledende informasjon om reguleringsobjektet. Nesten all informasjon om reguleringsobjektet overføres via tilbakemelding. Tilstedeværelsen av tilbakemelding er preget av at bruken av en viss innflytelse på det automatiske systemet innebærer en motvirkning som gjenoppretter tilstanden til hele det automatiske systemet.
I det enkleste tilfellet sammenligner den automatiske kontrolleren utgangssignalet til det automatiske systemet med referansesignalet for å finne ut hvor riktig det automatiske systemet utfører sin oppgave. Tilstedeværelsen av tilbakemelding i et automatisk system endrer dets statiske og dynamiske egenskaper. Takket være tilbakemelding kan et automatisk system være mer nøyaktig og raskere, eller omvendt, tregere. Det kan gjøre det automatiske systemet stabilt eller ustabilt.
Systemer som opererer etter prinsippet om avvik har følgende fordeler:
1) reduser avviket til den kontrollerte variabelen fra den nødvendige verdien, uavhengig av hvilke faktorer (eksterne forstyrrende påvirkninger, endringer i parametrene til systemelementene, endringer i innstillingshandlingen) forårsaket det;
2) er mindre følsomme for endringer i parametrene til systemelementene, sammenlignet med åpne systemer.
Systemer som opererer etter prinsippet om avvik har følgende ulemper:
1) i enkle enkeltsløyfesystemer med prinsippet om kontroll ved avvik, kan absolutt invarians ikke oppnås;
2) i systemer med prinsippet om regulering ved avvik, som i lukkede systemer, oppstår problemet med stabilitet.
På grunn av de betydelige fordelene med systemet med prinsippet om regulering ved avvik, er de mye brukt i teknologi.
Automatiske kontrollsystemer som opererer etter prinsippet om forstyrrelseskompensasjon, er utformet for å redusere påvirkningen av forstyrrende påvirkninger på det regulerte objektet ved å måle disse påvirkningene og kompensere for deres påvirkning på grunn av den omvendte kunstige påvirkningen på det regulerte objektet.
Ved utviklingen av dette prinsippet gikk ingeniører ut fra antakelsen om at for å redusere eller eliminere avviket til den kontrollerte verdien fra settpunktet forårsaket av påvirkning av en eller annen faktor, er det nødvendig at kontrollhandlingen er en viss funksjon av denne faktoren og egenskapene til det regulerte objektet.
Ved regulering etter prinsippet om forstyrrelseserstatning er problemet å kompensere for forstyrrelsens påvirkning på den kontrollerte verdien.
Arbeidsinformasjonen i disse systemene er forstyrrende påvirkninger, dårlig innflytelse som er gjenstand for erstatning. Derfor, i disse systemene, er det mulig å fullt ut kompensere for påvirkningen av den forstyrrende handlingen på den kontrollerte variabelen, dvs. det er mulig å oppnå invarians (uavhengighet) av den kontrollerte kvantiteten i forhold til denne forstyrrende handlingen. Den betraktede metoden kan kompensere for påvirkningen fra hver av de forstyrrende påvirkningene separat. Men i praksis er det vanligvis ikke mulig å kompensere for påvirkning av alle forstyrrende påvirkninger, siden en betydelig del av påvirkningene ikke kan måles, og når man prøver å kompensere for alle mulige forstyrrende påvirkninger, oppnås et ekstremt komplekst system.
Slike automatiske systemer krever innledende informasjon enda mer fullstendig enn automatiske systemer som opererer etter prinsippet om avvik. Faktisk, for å kompensere for påvirkningen av enhver forstyrrelse i steady state, og enda mer under forbigående forhold, er det nødvendig å vite nøyaktig denne påvirkningen.
I dette tilfellet velges en (hoved) eller to (ikke flere) forstyrrelser, og det bestemmes hvordan de påvirker den kontrollerte variabelen. Kontrollhandlingen som utføres av reguleringsobjektet avhenger av forstyrrelsen slik at endringene i den kontrollerte verdien ikke går utover de angitte grensene. Slike systemer er enkle og stabile i drift, men de er ikke i stand til å reagere på andre forstyrrelser som forårsaker et avvik i den kontrollerte variabelen.
|

Prinsippet for forstyrrelseskompensasjon er at for å redusere eller eliminere avviket Dx(t) til den kontrollerte verdien fra den innstilte verdien forårsaket av forstyrrelseshandlingen f(t), måles denne effekten og, som et resultat av dens transformasjon, styrehandlingen h(t) genereres, som, når den brukes på inngangen til det regulerte objektet, forårsaker et kompenserende avvik av den kontrollerte verdien y(t) til det motsatte fortegn sammenlignet med avviket forårsaket av den forstyrrende påvirkningen f(t) ). Forstyrrelsen f(t) måles ved hjelp av en forstyrrelseskompensator. Noen automatiske systemer inkluderer eksplisitt aktuatorer og kontroller.
Signalet på forstyrrelsen хв(t) i addereren legges til (fratrekkes) med masterhandlingen, som bestemmer den nødvendige verdien til den kontrollerte variabelen. Den totale effekten Dx(t) ved hjelp av en automatisk kontroller (for dette kontrollprinsippet er den automatiske kontrolleren i de fleste tilfeller en effektforsterker) forsterkes til verdien som er nødvendig for å oppnå den nødvendige driftsmodusen til det regulerte objektet . Styrehandlingen h(t) dannet på denne måten går inn i inngangen til det regulerte objektet og kompenserer for påvirkningen av den forstyrrende handlingen.
Et automatisk system som opererer etter prinsippet om forstyrrelseskompensasjon er et automatisk system med åpen sløyfe. I den er reguleringsprosessen ikke avhengig av resultatene av driften av det automatiske systemet (den kontrollerte verdien måles ikke, og ingen tiltak iverksettes hvis den ikke samsvarer med den nødvendige verdien), og bare en direkte effekt observeres.
Et automatisk system som opererer i henhold til dette prinsippet har høy hastighet, men lav nøyaktighet for å opprettholde den kontrollerte verdien. Høy hastighet sikres av det faktum at den automatiske kontrolleren reagerer ikke på effekten av påvirkningen fra den forstyrrende påvirkningen (avvik fra den kontrollerte variabelen), men på årsaken - endringen i den forstyrrende handlingen, forbereder kontrollobjektet på forhånd for et mulig avvik av den kontrollerte variabelen.
Automatiske systemer som opererer etter prinsippet om forstyrrelseskompensasjon har følgende fordeler:
1) tillate deg å fullt ut kompensere for de viktigste forstyrrende påvirkningene, det vil si at i disse systemene er det mulig å oppnå invariansen til den kontrollerte variabelen med hensyn til forstyrrende påvirkninger;
2) i dem, som i alle åpne systemer, er det ingen problemer med stabilitet.
Automatiske systemer som opererer etter prinsippet om forstyrrelseskompensasjon har følgende ulemper:
1) de eliminerer påvirkningen fra bare de viktigste forstyrrende påvirkningene, for hvilke kompensasjonskanaler er opprettet;
2) det er et avvik av den kontrollerte verdien fra den nødvendige verdien som følge av en endring i sekundære forstyrrende påvirkninger, som det ikke er noen kompensasjonskanaler for;
3) i disse systemene, som i åpne systemer, vises avvik av den kontrollerte verdien med en endring i egenskapene til objektet og elementene i det automatiske systemet;
4) Anvendelsen av prinsippet om kontroll av forstyrrelser er begrenset til objekter hvis egenskaper er kjente eller kan bestemmes.
Systemer som opererer etter prinsippet om forstyrrelseskompensasjon har spesielle anvendelser.
Automatiske kontrollsystemer som fungerer etter det kombinerte prinsippet, kombinerer forsog avbøyningsprinsippet. Slike automatiske systemer kombinerer de positive aspektene ved de tidligere diskuterte prinsippene for automatisk kontroll og eliminerer deres mangler.
|
I slike systemer inneholder det kombinerte automatiske systemet i tillegg til den lukkede hovedavvikskontrollsløyfen en kompensasjonssløyfe for en eller flere forstyrrelser. Mengden arbeidsinformasjon i det kombinerte automatiske systemet er høyere enn i tidligere systemer. Her legges informasjon om den forstyrrende påvirkningen til driftsinformasjonen om avviket til den styrte variabelen.
I kombinerte automatiske systemer implementeres prinsippet om regulering ved avvik ved hjelp av hovedtilbakemeldingen, og prinsippet om kontroll ved forstyrrelse ved hjelp av kompensasjonslenker. Hvis den mest signifikante feilen er forårsaket av den forstyrrende handlingen f(t), så introduseres en forbindelse for denne forstyrrelsen, men dersom en slik feil oppnås på grunn av en endring i kjørehandlingen x(t), vil forbindelsen for innstillingshandlingen bestemmes av den automatiske kontrollalgoritmen.
I kombinerte automatiske systemer eliminerer kompensasjonsforbindelsen for hovedforstyrrelsen (kjørehandling) komponenten av feilen forårsaket av denne forstyrrelsen (endrer kjørepåvirkningen), og som et resultat av tilbakemeldingshandlingen, feilene forårsaket av sekundære forstyrrende påvirkninger, som det ikke er erstatningsforbindelser for, reduseres. Hvis feilene forårsaket av de viktigste forstyrrende (innstillings-) påvirkningene ved hjelp av kompenserende lenker ikke elimineres fullstendig, reduseres også gjenværende feil ved hjelp av tilbakemelding.
For å danne en kontrollhandling i kombinerte automatiske systemer brukes både direkte informasjon om de viktigste forstyrrende påvirkningene (endringer i masterhandlingen) og avviket til den kontrollerte variabelen fra den nødvendige verdien forårsaket av alle forstyrrende påvirkninger (endring i masterhandlingen) . Derved:
1) i kombinerte automatiske systemer, ved hjelp av kompenserende koblinger, er det mulig å oppnå fullstendig kompensasjon for feil forårsaket av de viktigste forstyrrende og mestre påvirkningene (det er mulig å oppnå invarians);
2) sammen med muligheten for fullstendig kompensasjon av feil forårsaket av hovedpåvirkningene, i kombinerte automatiske systemer, ved hjelp av tilbakemelding, feilene forårsaket av sekundære forstyrrende påvirkninger, som det ikke er kompenserende forbindelser for, samt underkompenserte feil fra de viktigste påvirkningene, reduseres;
3) hvis betingelsene for å kompensere den forstyrrende handlingen brytes, reduseres den resulterende feilen av et lukket automatisk system, det vil si at kombinerte automatiske systemer er mindre følsomme for endringer i parametrene til åpne kanaler enn åpne automatiske systemer;
4) på grunn av tilstedeværelsen av åpne kompensasjonskanaler i kombinerte automatiske systemer, er stabilitetsproblemet ikke så akutt som i lukkede automatiske systemer.
Naturligvis er nøyaktigheten av regulering, oppnåelig i kombinerte systemer, høyere enn nøyaktigheten til alle andre automatiske systemer. I praksis er slike automatiske systemer komplekse og kostbare.
Dermed er kombinerte automatiske systemer de mest avanserte systemene med høy nøyaktighet for å opprettholde den kontrollerte verdien. På de betraktede prinsippene bygges ikke bare tekniske systemer for automatisk kontroll, men også kontrollsystemer i samfunnet og reguleringssystemer i levende organismer. Derfor forskningsmetoder tekniske systemer automatisk regulering til en viss grad kan brukes til å studere kontrollsystemer i samfunn og dyreliv.
Innledning 5
Utvikling av et funksjonsdiagram av et automatisk kontrollsystem (ACS) 6
Utvikling av differensialligninger og overføringsfunksjoner av systemelementer. 7
Utvikling blokkdiagram SAR 11
Transformasjon av strukturskjemaet til ACS til den kanoniske formen 12
Analyse av ACS-stabilitet ved algebraiske kriterier 13
Beregning og konstruksjon av forbigående prosesser langs kanalene for regulerende og forstyrrende påvirkninger. femten
Forbigående kvalitetsvurdering 17
Grafikkapplikasjon 19
Referanser 22
Introduksjon
I den funksjonelle utformingen av automatiske kontrollsystemer brukes metoder for teorien om automatisk kontroll oftest. Det automatiske systemet består av en rekke tekniske enheter med visse funksjonelle og dynamiske egenskaper. For deres beskrivelse og studie er et automatisk system representert av et visst sett med elementer utstyrt med de tilsvarende egenskapene.
Virkelige tekniske objekter er beskrevet av ikke-lineære differensial- og algebraiske ligninger. Men siden de i det innledende designstadiet løser problemene med foreløpig evaluering av tekniske løsninger og prognoser, er det ganske rimelig å bruke relativt enkle matematiske modeller for disse formålene. I denne forbindelse blir de ikke-lineære ligningene til den matematiske modellen utsatt for linearisering.
Beskrivelsen av automatiske systemer er sterkt forenklet ved å bruke metodene for operasjonell beregning. Ved å bruke Laplace-transformasjonen reduseres den lineære differensialligningen til algebraisk ligning med komplekse variabler.
Utvikling av et funksjonsdiagram av et automatisk kontrollsystem (sar)
ACS kan representeres av to hoveddeler - reguleringsobjektet og reguleringsenheten - regulatoren.
Tilstanden til objektet bestemmes av en rekke verdier som kjennetegner:
Innvirkning på objektet til regulatoriske enheter;
Påvirkning på objektet til det ytre miljøet;
Flyten av prosesser i selve objektet.
Generelt kan reguleringsobjektet representeres av følgende ordning:
Ris. 1. Ordning av reguleringsobjektet
Hvor Z er totalen av kontrollerte ytre påvirkninger;
F - ukontrollerte ytre påvirkninger;
X – regulatoriske påvirkninger;
U - justerbare verdier.
I vårt tilfelle har objektet (DC-generator) én justerbar effekt (tvungen strøm i c) og én justerbar verdi (klemmespenning U n) og kalles enkel eller enkeltkoblet.
Oppførselen til det regulerte objektet kan vurderes i modusene statikk og dynamikk. Et funksjonsdiagram er et diagram der hvert funksjonselement i systemet tilsvarer en bestemt kobling. Det skjematiske diagrammet over utviklet ATS er vist i det grafiske vedlegget.
For denne ACS ser funksjonsdiagrammet slik ut:
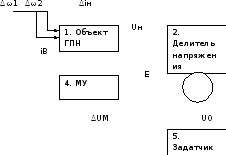
Figur 2. Funksjonsdiagram av ACS
Hvor 1 - gjenstand for regulering - en konstant spenningsgenerator;
2 - spenningsdeler;
3 - sammenligningsenhet, er en stimulerende node;
4 - forsterker (i vårt tilfelle en magnetisk forsterker med selvmagnetisering);
5 - setter - enhet for innstilling av installasjonen.
Belastningsstrømmen til den magnetiske forsterkeren er en kontrollvariabel, så det er ingen aktuator på funksjonsdiagrammet.
Driftsprinsipp:
Den regulerte verdien er spenningen U n ved terminalene til generatoren, som sammenlignes med referansespenningen U 0 gjennom deleren K (U 1) mistilpasning E mates til kontrollviklingen til den magnetiske forsterkeren. Belastningen til den magnetiske forsterkeren er strømmen i eksitasjonsviklingen til hjelpegeneratorens eksiter.
Innstillingen settes av det justerbare spenningsdelerforholdet R 1 , som etablerer samsvaret mellom den regulerte spenningen U n og referansespenningen U 0 .
Forstyrrende, ukontrollerte påvirkninger er: spenningsfall i generatorviklingene forårsaket av laststrømmen i n; interferens forårsaket av belastningsstrømmen i n; interferens forårsaket av en endring i rotasjonshastigheten til generatorakslene ω 1 og ω 2; forsyningsspenningsfluktuasjon til den magnetiske forsterkeren ∆U n.
I samsvar med oppgaven på funksjonsdiagrammet vårt, er inngangs- og utgangsverdiene angitt for hver funksjonsblokk. Handlingene til forstyrrende påvirkninger vises også.
Etter reguleringsprinsippet automatiske kontrollsystemer er delt inn i fire klasser.
1. Automatisk stabiliseringssystem - et system der kontrolleren opprettholder en konstant innstilt verdi for den kontrollerte parameteren.
2. Programkontrollsystem - et system som gir en endring i den kontrollerte parameteren i henhold til en forhåndsbestemt lov (i tid).
3. Sporingssystem - et system som gir en endring i den kontrollerte parameteren avhengig av en annen verdi.
4. Ekstremt kontrollsystem - et system der regulatoren opprettholder verdien av den kontrollerte variabelen som er optimal for skiftende forhold.
For regulering temperaturregime elektriske varmeinstallasjoner, hovedsakelig systemer av de to første klassene brukes.
Automatiske temperaturkontrollsystemer kan deles inn i to grupper i henhold til typen handling: intermitterende og kontinuerlig regulering.
Automatiske regulatorer for funksjonelle funksjoner er delt inn i fem typer: posisjonell (relé), proporsjonal (statisk), integral (astatisk), isodrom (proporsjonal-integral), isodrom med forhånd og med førstederiverte.
Posisjonelle regulatorer omtales som intermitterende ACS, og andre typer regulatorer omtales som kontinuerlig ACS. Nedenfor er hovedtrekkene til posisjonelle, proporsjonale, integrerte og isodromiske kontrollere, som er mest brukt i automatiske temperaturkontrollsystemer.
(Fig. 1) består av et kontrollobjekt 1, en temperatursensor 2, en programmeringsenhet eller en temperaturnivåstiller 4, en kontroller 5 og en aktuator 8. I mange tilfeller er en primærforsterker 3 plassert mellom sensoren og programmeringsenhet, og mellom kontrolleren og utøvende enhet- sekundær forsterker 6. Ekstra sensor 7 brukes i isodromiske kontrollsystemer.
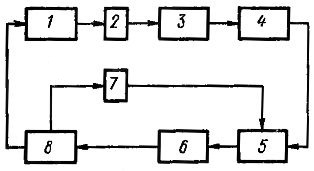
Ris. 1. Funksjonsdiagram av automatisk temperaturkontroll
Posisjonelle (relé) temperaturregulatorer
Posisjonsregulatorer er de der reguleringsorganet kan innta to eller tre spesifikke stillinger. I elektriske varmeinstallasjoner brukes to- og treposisjonsregulatorer. De er enkle og pålitelige i drift.
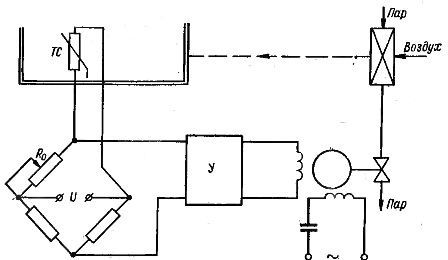
På fig. 2 vist kretsskjema to-posisjonsregulering av lufttemperatur.
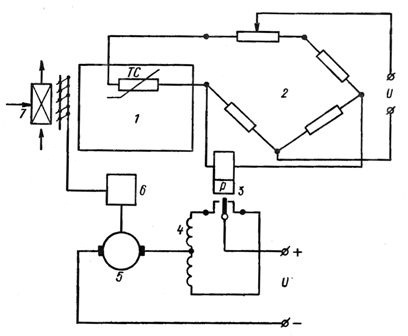
Ris. Fig. 2. Skjematisk diagram av av/på lufttemperaturkontroll: 1 - kontrollobjekt, 2 - målebro, 3 - polarisert relé, 4 - motoreksitasjonsviklinger, 5 - motorarmatur, 6 - redusering, 7 - brennverdi.
For å kontrollere temperaturen i det regulerte objektet brukes termisk motstand TS, som inngår i en av armene til målebroen 2. Verdiene av bromotstanden velges på en slik måte at ved en gitt temperatur broen er balansert, det vil si at spenningen i diagonalen til broen er null. Når temperaturen stiger, slår det polariserte reléet 3, inkludert i diagonalen til målebroen, på en av viklingene 4 på den elektriske motoren likestrøm, som ved hjelp av redusering 6 lukkes luftventil foran varmeren 7. Når temperaturen synker åpnes luftventilen helt.
Med to-posisjons temperaturkontroll kan mengden av tilført varme kun stilles inn på to nivåer - maksimum og minimum. Maksimal varmemengde må være mer enn nødvendig for å opprettholde ønsket kontrollert temperatur, og minimum må være mindre. I dette tilfellet svinger lufttemperaturen rundt den innstilte verdien, det vil si den såkalte selvoscillerende modus(Fig. 3, a).
Linjene som tilsvarer temperaturene τ n og τ i definerer nedre og øvre grenser for dødsonen. Når temperaturen på det regulerte objektet, synkende, når verdien τ n, øker mengden varme som tilføres øyeblikkelig og temperaturen til objektet begynner å øke. Etter å ha nådd verdien τ in, reduserer regulatoren varmetilførselen, og temperaturen synker.
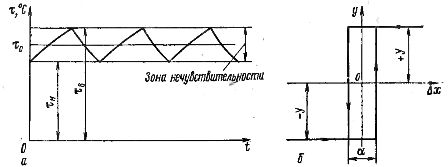
Ris. 3. Tidsrespons for på-av-kontroll (a) og statisk respons av på-av-kontroller (b).
Hastigheten for temperaturøkning og -nedgang avhenger av egenskapene til det regulerte objektet og dets tidskarakteristikk (akselerasjonskurve). Temperatursvingninger går ikke utover dødbåndet hvis endringer i varmetilførsel umiddelbart forårsaker temperaturendringer, det vil si hvis det ikke er forsinkelse av det kontrollerte objektet.
Med en nedgang i dødsonen synker amplituden til temperatursvingninger ned til null ved τ n = τ c. Dette krever imidlertid at varmetilførselen varieres med en uendelig høy frekvens, noe som er ekstremt vanskelig å gjennomføre i praksis. I alle reelle reguleringsobjekter er det en forsinkelse. Reguleringsprosessen i dem fortsetter omtrent som følger.
Når temperaturen til det regulerte objektet faller til verdien τ n, endres varmetilførselen øyeblikkelig, men på grunn av forsinkelsen fortsetter temperaturen å synke i noen tid. Deretter stiger den til verdien τ som varmetilførselen øyeblikkelig avtar ved. Temperaturen fortsetter å stige en stund, deretter synker temperaturen på grunn av redusert varmetilførsel, og prosessen gjentas igjen.
På fig. 3 er b vist statisk karakteristikk av på/av-kontrolleren. Det følger av det at den regulatoriske innvirkningen på objektet bare kan ha to verdier: maksimum og minimum. I det betraktede eksemplet tilsvarer maksimum posisjonen der luftventilen (se fig. 2) er helt åpen, minimum - når ventilen er lukket.
Tegnet for kontrollhandlingen bestemmes av tegnet på avviket til den regulerte verdien (temperaturen) fra dens innstilte verdi. Størrelsen på kontrollhandlingen er konstant. Alle to-posisjonskontrollere har en hysteresesone α, som oppstår på grunn av forskjellen i drifts- og frigjøringsstrømmene til det elektromagnetiske reléet.
Eksempel på bruk av temperaturkontroll på/av:
Proporsjonale (statiske) temperaturregulatorer
I tilfeller der høy kontrollnøyaktighet er nødvendig eller når en selvoscillerende prosess er uakseptabel, gjelder kontrollere med kontinuerlig kontrollprosess. Disse inkluderer proporsjonale regulatorer (P-regulatorer) egnet for å kontrollere et bredt spekter av teknologiske prosesser.
I tilfeller hvor høy kontrollnøyaktighet er nødvendig eller når en selvsvingende prosess er uakseptabel, brukes regulatorer med en kontinuerlig kontrollprosess. Disse inkluderer proporsjonale regulatorer (P-regulatorer), egnet for regulering av et bredt spekter av teknologiske prosesser.
I automatiske kontrollsystemer med P-regulatorer er posisjonen til reguleringsorganet (y) direkte proporsjonal med verdien av den kontrollerte parameteren (x):
y=k1х,
hvor k1 er proporsjonalitetsfaktoren (kontrollerforsterkning).
Denne proporsjonaliteten finner sted til reguleringsorganet når sine ytterposisjoner (endebrytere).
Bevegelseshastigheten til reguleringslegemet er direkte proporsjonal med endringshastigheten til den kontrollerte parameteren.
På fig. 4 viser et skjematisk diagram av et system for automatisk regulering av romtemperaturen ved bruk av en proporsjonal regulator. Romtemperaturen måles med et motstandstermometer TC som er inkludert i målebrokrets 1.

Ris. 4. Lufttemperatur proporsjonal kontrollskjema: 1 - målebro, 2 - kontrollobjekt, 3 - varmeveksler, 4 - kondensatormotor, 5 - fasefølsom forsterker.
Ved en gitt temperatur er broen balansert. Når den kontrollerte temperaturen avviker fra innstilt verdi, oppstår det en ubalansespenning i brodiagonalen, hvis størrelse og fortegn avhenger av størrelsen og fortegn på temperaturavviket. Denne spenningen forsterkes av en fasefølsom forsterker 5, ved hvis utgang viklingen av en tofaset kondensatormotor 4 aktuatorer.
Aktuatoren beveger kontrollelementet, endrer strømmen av kjølevæske inn i varmeveksleren 3. Samtidig med bevegelsen av kontrollelementet endres motstanden til en av armene på målebroen, som et resultat av at temperaturen endres, kl. som broen er balansert.
På grunn av stiv tilbakemelding tilsvarer hver posisjon av reguleringsorganet sin egen likevektsverdi for den kontrollerte temperaturen.
En proporsjonal (statisk) kontroller er preget av gjenværende ujevn regulering.
Ved et brå avvik av lasten fra innstilt verdi (i øyeblikket t1), vil den kontrollerte parameteren etter en viss tidsperiode (øyeblikket t2) komme til en ny stabil verdi (fig. 4). Dette er imidlertid bare mulig med en ny posisjon til reguleringsorganet, det vil si med en ny verdi av den kontrollerte parameteren, som avviker fra den innstilte verdien med δ.

Ris. 5. Tidskarakteristikker for proporsjonal kontroll
Ulempen med proporsjonale regulatorer er at hver parameterverdi kun tilsvarer én spesifikk posisjon til regulatoren. For å opprettholde den innstilte verdien til parameteren (temperaturen) når belastningen (varmeforbruket) endres, er det nødvendig at reguleringsorganet tar en annen posisjon tilsvarende den nye belastningsverdien. Dette skjer ikke i en proporsjonal kontroller, noe som resulterer i et gjenværende avvik av den kontrollerte variabelen.
Integral (statiske regulatorer)
Integral (astatisk) slike regulatorer kalles inn som når parameteren avviker fra den innstilte verdien, beveger reguleringslegemet seg mer eller mindre sakte og hele tiden i én retning (innenfor arbeidsslaget) inntil parameteren igjen tar den innstilte verdien. Slagretningen til reguleringslegemet endres bare når parameteren går gjennom den innstilte verdien.
I integrerte regulatorer av elektrisk handling opprettes en dødsone vanligvis kunstig, innenfor hvilken en endring i en parameter ikke forårsaker bevegelse av reguleringsorganet.
Bevegelseshastigheten til reguleringslegemet i den integrerte regulatoren kan være konstant og variabel. Et trekk ved den integrerte kontrolleren er fraværet av et proporsjonalt forhold mellom de etablerte verdiene til den kontrollerte parameteren og posisjonen til reguleringsorganet.
På fig. 6 viser et skjematisk diagram av et automatisk temperaturkontrollsystem som bruker en integrert kontroller. I den, i motsetning til den proporsjonale temperaturkontrollkretsen (se fig. 4), er det ingen hard tilbakemelding.
Ris. 6. Opplegg integrert regulering lufttemperatur
I en integrert kontroller er hastigheten til reguleringsorganet direkte proporsjonal med avviket til den kontrollerte parameteren.
Prosessen med integrert temperaturkontroll med en brå endring i belastning (varmeforbruk) er vist i fig. 7 ved hjelp av tidskarakteristikker. Som det fremgår av grafen, går den kontrollerte variabelen med integralkontroll sakte tilbake til den innstilte verdien.

Ris. 7. Tidskarakteristikker for integralregulering
Isodromiske (proporsjonal-integrerte) kontrollere
Isodromisk regulering har egenskapene til både proporsjonal og integral regulering. Bevegelseshastigheten til reguleringslegemet avhenger av størrelsen og hastigheten på avviket til den kontrollerte parameteren.
Hvis den kontrollerte parameteren avviker fra innstilt verdi, utføres reguleringen som følger. Til å begynne med beveger reguleringsorganet seg avhengig av størrelsen på avviket til den kontrollerte parameteren, det vil si at proporsjonal regulering finner sted. Deretter gjør reguleringsorganet en ekstra bevegelse, som er nødvendig for å eliminere den gjenværende uensartetheten (integrert regulering).
Et isodromisk lufttemperaturkontrollsystem (fig. 8) kan oppnås ved å erstatte den stive tilbakemeldingen i den proporsjonale kontrollkretsen (se fig. 5) med en elastisk tilbakemelding (fra regulatoren til). Elektrisk tilbakemelding i det isodromiske systemet utføres av et potensiometer og introduseres i kontrollsystemet gjennom en krets som inneholder motstand R og kapasitans C.
Under transiente prosesser påvirker tilbakemeldingssignalet, sammen med parameteravvikssignalet, de påfølgende elementene i systemet (forsterker, elektrisk motor). Når reguleringslegemet er stasjonært, uansett hvilken posisjon det er, når kondensatoren C er ladet, avtar tilbakemeldingssignalet (i stabil tilstand er det lik null).
Ris. 8. Opplegg for isodromisk lufttemperaturkontroll
Det er typisk for isodrom kontroll at uensartetheten i kontrollen (relativ feil) avtar med økende tid, og nærmer seg null. I dette tilfellet vil ikke tilbakemeldingen forårsake gjenværende avvik av den kontrollerte variabelen.
Dermed fører isodrom kontroll til mye bedre resultater enn proporsjonal eller integrert kontroll (for ikke å snakke om posisjonskontroll). Proporsjonal kontroll på grunn av tilstedeværelsen av stiv tilbakemelding skjer nesten umiddelbart, isodromisk - sakte.
Programvaresystemer for automatisk temperaturkontroll
For å implementere programkontroll er det nødvendig å kontinuerlig påvirke innstillingen (settpunktet) til kontrolleren slik at den kontrollerte verdien endres i henhold til en forhåndsbestemt lov. Til dette formålet leveres tuning-enheten for kontrolleren med et programvareelement. Denne enheten tjener til å etablere loven om endring av den gitte verdien.
Under elektrisk oppvarming kan ACS-aktuatoren slå på eller av deler av de elektriske varmeelementene, og dermed endre temperaturen på den oppvarmede installasjonen i henhold til et gitt program. Programvarekontroll av lufttemperatur og fuktighet er mye brukt i kunstige klimainstallasjoner.
Den moderne teorien om automatisk kontroll er hoveddelen av kontrollteorien. Det automatiske kontrollsystemet består av et justerbart objekt og kontroller som virker på objektet når en eller flere justerbare variabler endres. Under påvirkning av inngangssignaler (kontroll eller forstyrrelse), endres de kontrollerte variablene. Hensikten med regulering er å danne slike lover, der de utgangsregulerte variablene vil avvike lite fra de nødvendige verdiene. Løsningen av dette problemet er i mange tilfeller komplisert av tilstedeværelsen av tilfeldige forstyrrelser (støy). I dette tilfellet er det nødvendig å velge en slik kontrolllov der styresignalene vil passere gjennom systemet med lave forvrengninger, og støysignalene praktisk talt ikke vil bli overført.
Teorien om automatisk kontroll har kommet langt i utviklingen. I den innledende fasen ble det laget metoder for å analysere stabiliteten, kvaliteten og nøyaktigheten av regulering av kontinuerlig lineære systemer. Deretter metodene for analyse av diskrete og diskrete- kontinuerlige systemer. Det kan bemerkes at metodene for beregning av kontinuerlige systemer er basert på frekvensmetoder, og metodene for beregning av diskrete og diskrete kontinuerlige systemer er basert på z-transformmetoder.
For tiden utvikles metoder for analyse av ikke-lineære automatiske kontrollsystemer. Brudd på prinsippet om superposisjon i ikke-lineære systemer, tilstedeværelsen av en rekke vekslende (avhengig av virkningen) regimer med stabile, ustabile bevegelser og selvsvingninger kompliserer analysen deres. Designeren møter enda større vanskeligheter ved beregning av ekstreme og selvjusterende kontrollsystemer.
Både teorien om automatisk kontroll og teorien om kontroll inngår i vitenskapen under det generelle navnet "teknisk kybernetikk", som nå har fått en betydelig utvikling. Teknisk kybernetikk studerer de generelle mønstrene til komplekse dynamiske kontrollsystemer for teknologiske og produksjonsprosesser. Teknisk kybernetikk, automatisk kontroll og automatisk regulering utvikler seg i to hovedretninger: den første er forbundet med konstant fremgang og forbedring i utformingen av elementer og teknologien for deres produksjon; den andre - med den mest rasjonelle bruken av disse elementene eller deres grupper, som er oppgaven med å designe systemer.
Utformingen av automatiske kontrollsystemer kan utføres på to måter: ved analysemetoden, når, med en forhåndsvalgt systemstruktur (ved beregning eller modellering), dens parametere bestemmes;
ved syntesemetoden, når, i henhold til kravene, den beste strukturen og parametrene umiddelbart velges for systemet. Begge disse metodene er vidt utbredt praktisk bruk og er derfor fullstendig dekket i denne boken.
Å bestemme parametrene til et system, når dets struktur og krav for hele systemet som helhet er kjent, refererer til problemet med syntese. Løsningen på dette problemet med et lineært kontrollobjekt kan finnes ved å bruke for eksempel frekvensmetoder, rotlokusmetoden, eller ved å studere banene til røttene til den karakteristiske ligningen til et lukket system. Valg av korrigerende enhet ved syntese i klasserommet rasjonelle brøkfunksjoner kompleks variabel kan gjøres ved hjelp av grafen analytiske metoder. De samme metodene gjør det mulig å syntetisere korrigerende enheter som undertrykker selvoscillerende og ustabile periodiske moduser i ikke-lineære systemer.
Syntesemetoder ble videreutviklet på grunnlag av prinsippene om maksimal og dynamisk programmering, når den optimale kontrollloven ut fra et gitt kvalitetskriteriums synspunkt bestemmes, som gir den øvre grensen for systemets kvalitet, som må være etterstrebet ved utformingen av den. Imidlertid er løsningen av dette problemet praktisk talt ikke alltid mulig på grunn av kompleksiteten til den matematiske beskrivelsen av de fysiske prosessene i systemet, umuligheten av å løse selve optimaliseringsproblemet og vanskelighetene med den tekniske implementeringen av den funnet ikke-lineære kontrollloven. Det skal bemerkes at implementering av komplekse kontrolllover bare er mulig når en digital datamaskin er inkludert i systemsløyfen. Opprettelsen av ekstreme og selvjusterende systemer er også forbundet med bruk av analoge eller digitale datamaskiner.
Dannelsen av automatiske kontrollsystemer utføres som regel på grunnlag av analytiske metoder for analyse eller syntese. På dette stadiet av utformingen av kontrollsystemer, basert på de aksepterte forutsetningene, kompileres en matematisk modell av systemet og dets foreløpige struktur velges. Avhengig av type modell (lineær eller ikke-lineær), velges en beregningsmetode for å bestemme parametrene som gir de spesifiserte indikatorene for stabilitet, nøyaktighet og kvalitet. Etter det blir den matematiske modellen raffinert og ved hjelp av midlene matematisk modellering bestemme de dynamiske prosessene i systemet. Under påvirkning av forskjellige inngangssignaler blir frekvenskarakteristikkene tatt og sammenlignet med de beregnede. Deretter er stabilitetsmarginene til systemet i fase og modul endelig etablert og hovedkvalitetsindikatorene funnet.
Videre innstilling av typiske kontrollhandlinger på modellen; fjerne egenskapene til nøyaktighet. På grunnlag av matematisk modellering utarbeides tekniske krav til systemutstyret. En kontroller settes sammen fra det produserte utstyret og overføres til semi-naturlig modellering, der kontrollobjektet samles i form av en matematisk modell.
Basert på egenskapene oppnådd som et resultat av HIL-modellering, tas det en beslutning om styringens egnethet til å arbeide med et reelt reguleringsobjekt. Det endelige valget av regulatorparametrene og justeringen av dem utføres under naturlige forhold under den eksperimentelle utviklingen av kontrollsystemet.
Utviklingen av teorien om automatisk kontroll basert på ligningene for tilstand og z-transformer, maksimalprinsippet og den dynamiske programmeringsmetoden forbedrer metoden for å designe kontrollsystemer og lar deg lage svært effektive automatiske systemer for det meste ulike bransjer Nasjonal økonomi.
De automatiske kontrollsystemene oppnådd på denne måten sikrer høy kvalitet på produktene, reduserer kostnadene og øker arbeidsproduktiviteten.
Vi anbefaler deg å lese
 Psykologiske kjennetegn ved barn i ungdomsårene
Psykologiske kjennetegn ved barn i ungdomsårene Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole
Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole, diagnose, behandling Behandling av urogenital klamydia") Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia
Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva
Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva

