1.1 Grunnleggende begreper og typer
AUTOMATISK REGULERING
Automatisk kontroll er et sett med handlinger rettet mot implementering av funksjonen til kontrollobjektet i samsvar med programmet og formålet med kontroll.
Et kontrollobjekt forstås som en enhet der verdien av de nødvendige indikatorene for en prosess opprettholdes. Den faktiske tilstanden til kontrollobjektet bestemmes av en eller flere driftsparametere y Jeg , kalt justerbare verdier eller justerbare koordinater og bestemme handlingene til kontrollsystemet (fig. 1.1).
Kjenner du metodene, prinsippene og grunnleggende for automatisering? Oppdater prosessen der menneskelig aktivitet vil bli erstattet av aktiviteten til ulike enheter og enheter! Vi vil introdusere deg for de ulike typer styring og hvordan automatiseringsstyring fungerer.
Tidligere ble alt styrt for hånd. Dette endret seg imidlertid med starten av automatiseringen. I dag skiller vi forskjellige typer ledelse. Kontroll er en handling på et objekt for å oppnå et gitt mål. Alle har imidlertid alltid forsøkt å kvitte seg med de kjedelige fysiske og mentale aktivitetene, som derfor så smått begynte å ta over automatene. Når automatisk styring ble erstattet av manuell styring, kunne vi begynne å snakke om starten på automatisering. Vi deler automatisk kontroll i direkte og indirekte.
PÅ under reelle forhold er kontrollobjektet påvirket av ytre påvirkninger, som kalles forstyrrelser f Jeg. I hovedsak kan enhver fysisk størrelse som karakteriserer det kontrollerte objektet, for eksempel hastighet (lineær og rotasjon), spenning og strøm, lineære og vinkelforskyvninger osv. brukes som regulerte størrelser.
Tre typer kontroll og definisjon av regulering
I den første av dem foregår kontrollprosessen uten strømkilde. For øyeblikket er imidlertid den andre typen strømstyring ofte brukt og diskuteres i teksten nedenfor. Vi kan dele automatiseringskontroll med strømforsyningen avhengig av om dens utgang støttes.
Kontroll Kontroll høyere former styre. . Kontroll er en kontrollmetode som ikke kan kontrolleres på noen måte. Regulering innen automatisering består i å opprettholde fysisk mengde ved en konstant verdi eller ved en verdi som endres i henhold til en regel. Mengdeverdiene sammenlignes konstant med verdien som kreves under kontrollen. Eventuelle avvik elimineres ved inngrep i reguleringsprosessen. Følgende figur illustrerer tydelig forskjellen mellom kontroll og regulering.
Justerbare verdier y Jeg bestemt av kontrollhandlinger U Jeg (t) ved inngangen til kontrollobjektet. Disse effektene forårsaker endringer i den interne tilstanden til operativsystemet og, som et resultat, i de kontrollerte driftsparametrene.
Vanligvis utføres automatisk kontroll ved hjelp av automatiske kontrollenheter uten menneskelig innblanding. Kombinasjonen av den automatiske kontrollenheten og kontrollobjektet, som samhandler med hverandre, danner et automatisk kontrollsystem (ACS).
Høyere former for ledelse og kunstig intelligens
Diagrammet viser hvordan automatisering fungerer. Kilde: Ivan Schwartz, Fundamentals of Automation. Høyere former for kontroll inkluderer optimal kontroll, adaptiv kontroll, læring og kunstig intelligens. Optimal kontroll er så effektiv som mulig eller omvendt veldig rask. Systemet er i stand til å oppnå de ønskede egenskapene med minimalt energiforbruk, alltid på jakt etter de mest fordelaktige effektene og dermed sikre den beste oppførselen til systemet under gitte forhold.
Hovedtypene for automatisk kontroll er:
1) automatisk kontroll med en åpen kjede av påvirkninger (hard kontroll);
2) automatisk regulering;
3) automatisk innstilling.
Automatiske kontrollsystemer med en åpen kjede av påvirkninger kalles vanligvis åpne. I disse systemene utføres kontroll etter lovene; uavhengig av det faktiske produksjonsforløpet
Utvikling av et funksjonsdiagram av ATS
Med adaptiv kontroll kan systemet til og med endre struktur og parametere. Tilpasser seg alltid den optimale kontrollprosessen, tilpasser seg endringer i parametrene til det kontrollerte objektet. I ledelsesprosessen, som kalles læring, er det adaptive systemet enda mer perfekt. Han kan huske informasjonen som mottas og gjenbruke den i lignende situasjoner.
Kunstig intelligens er et system med den høyeste grad av kontroll. Et kunstig opprettet system kan gjenkjenne objekter og fenomener og kan analysere deres relasjoner. Dette skaper modeller av miljøet og tar meningsfulle beslutninger og kan forutsi konsekvensene deres. Et kunstig intelligenssystem kan oppdage nye modeller og til og med forbedre ytelsen.
prosess, og utføres i åpen sløyfe for å oppnå et visst sluttresultat (fig. 1.2, a).
Vanskelig oppgave ved inngangen til systemet gjennom kontrollenheten CU og utøvende enhet(forsterker) DUT virker på kontrollobjektet til op-ampen, ved utgangen som verdien er satt X exit tilsvarende denne oppgaven X i .
Prinsipper for drift av kontrollsystemet på det administrerte systemet
Det er flere måter å implementere automatisk kontroll. Logiske, kontinuerlige, diskrete og uklare kontroller skiller seg fra hverandre ved prinsippet om drift av kontrollsystemet på det kontrollerte systemet. Hva kjennetegner hver type kjøring?
Dette skjer som et resultat av utplassering av datamaskiner som en kontroller for å kontrollere datamaskiner som ikke kan behandle et kontinuerlig signal, konverteres til en diskret forbindelse mellom innganger og utganger, ettersom forholdet mellom pulssekvensen lest i tidssekvensen til samplingsperioden av prøvetakingstiden reduseres ved en rask kontrollert prosess.
- Kontrollen bruker variabler med to verdier.
- Det er alltid bare to alternativer.
- Mengder er uttrykt som verdier 1 og 0.
- Relasjoner mellom variabler kalles logiske funksjoner.
- Handlingen er permanent angitt.
- Mengdene endres kontinuerlig over tid.
- Skaper en kontinuerlig kobling mellom innganger og utganger.
I slike systemer blir ikke prosessforløpet og den utgangskontrollerte verdien korrigert (ikke kontrollert), derfor kan den avvike fra den spesifiserte modusen. Styringen som brukes i slike systemer kalles åpen sløyfestyring.
ACS med en åpen kjede av påvirkninger brukes for å sikre en viss operasjonssekvens for ulike elementer i automatiske enheter. I mer komplekse tilfeller kan det gjennomføres en programkontroll av en prosess med en åpen syklus av påvirkninger. Et eksempel er kontrollsystemet for start og bremsing av motorer.
Det faktum at kontrollfunksjonene beregnes digitalt i dette tilfellet er årsaken til diskretisering under systemdrift. Begrepet diskret system i seg selv, i motsetning til et kontinuerlig system, betyr at verdiene som er inkludert i prosessen er i form av en sekvens av pulser, som tilsvarer representasjonen av funksjonen bare i spesifikke og i prinsippet like tidsintervaller. En annen type sampling, også til stede i digitale kontrollsystemer, er signalverdikvantisering.
I virkelige systemer er den viktigste årsaken til fremkomsten av minste endringsverdier i tillegg til ordlengden som brukes i mikrokontrolleren, prosesseringsnøyaktigheten oppnådd i analog-til-digital-omformere. Generell ordning diskret kontrollsystem er vist på figuren. Kontrollblokken er representert i denne løsningen ved hjelp av en kontrollalgoritme inneholdt i mikrokontrollerprogrammet. Den målte mengden - som utgjør tilbakemeldingssignalet - legges inn i mikrokontrolleren kun ved såkalte samplingsmomenter, gjentatt med en periode.
I styringssystemer med åpen sløyfe utføres styring i henhold til masterhandlingen, som i generell sak kan representere programkommandoer.
Dette prinsippet består i det faktum at for å redusere avviket til den kontrollerte variabelen fra den innstilte verdien, som vises på grunn av tregheten til systemobjektet, dannes kontrollhandlingen i samsvar med denne handlingen og egenskapene til kontrollobjektet (Fig. 1.2, a). 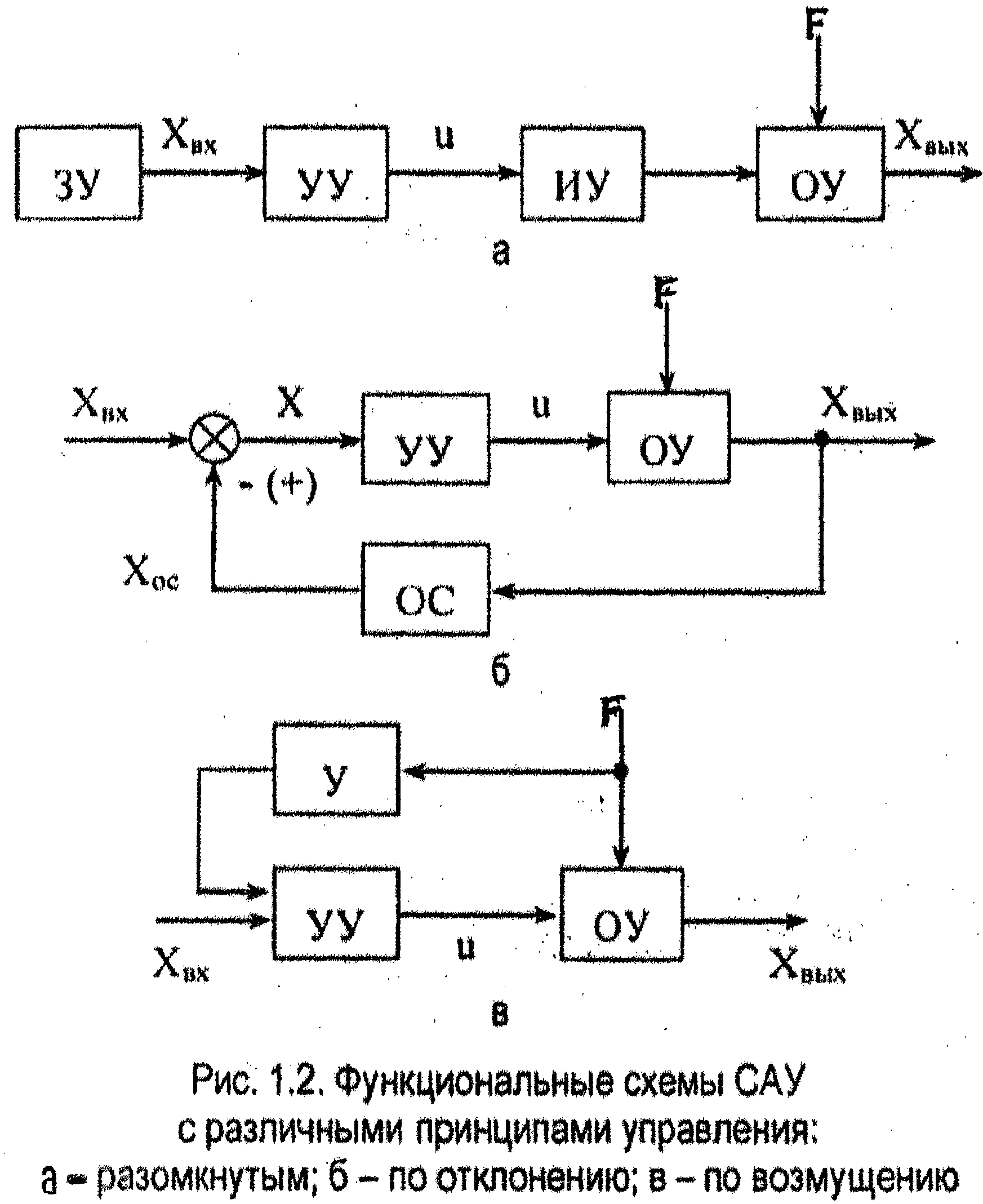
Resultatet av beregningen av kontrollalgoritmen legges også inn med en samplingshastighet, der den enten brukes i numerisk form for å kontrollere det utøvende systemet, eller krever konvertering til en analog verdi. Diskrete digitale kretser erstatter analoge systemer. Det digitale systemet garanterer stabiliteten til kontrollparametrene over tid og med temperaturendringer, samt enkel endring av dem, selv når enheten kontrolleres. I løpet av arbeidet er det også akseptabelt å endre strukturen i systemet, noe som i stor grad øker fleksibiliteten til ledelsen.
Kontrollenheten konverterer og forsterker masterhandlingen og genererer kontrollhandlingen u(t).
Kontrollhandlingen fra utgangen til kontrollenheten går inn i kontrollobjektet til kontrollenheten og søker å endre den kontrollerte verdien X exit i samsvar med drivkraften.
Slik kontroll kalles rigid, siden den ikke tar hensyn til de faktiske verdiene til den kontrollerte variabelen og forstyrrende påvirkninger (ACS-parametrene anses som konstante).
Generelt er digitale kontrollere mye mer i stand til å bruke moderne kontrollmetoder, og tar hensyn til relativt komplekse matematiske operasjoner. Optimaliseringsprosedyrer brukt i digitale kontrollsystemer kan ta hensyn til mer komplekse kriterier, for eksempel integrerte kriterier avledet fra moderne stat-romkontrollstrukturer. På grunn av det enkle å endre parametere under drift av systemet, opprettes det kontrollere som har egenskapen til å justere seg selv til parametrene til et bestemt objekt basert på målinger som utføres automatisk under oppstart.
GRUNNLEGGENDE LEDELSESPRINSIPPER
Avhengig av metodene for å danne kontrollhandlingen, skilles følgende kontrollprinsipper ut:
Forstyrrelseskontrollprinsipp,
Prinsipp for avvikskontroll,
Prinsippet om kombinert kontroll.
PRINSIPP FOR FORORDNINGSKONTROLL
Å redusere eller eliminere avviket til den kontrollerte variabelen fra den nødvendige verdien, forårsaket av påvirkningen av forskjellige forstyrrelser i åpne systemer, kan utføres ved å bruke prinsippet om forstyrrelseskontroll, diskutert nedenfor. Funksjonsdiagrammet for forstyrrelseskontrollen er gitt i Fig. 1.2, c. Prinsippet for forstyrrelseskontroll er at for å redusere eller eliminere avviket til den kontrollerte variabelen X exit fra den innstilte verdien måles den viktigste forstyrrende effekten F og konverteres til en kontrollhandling u(t) påført systeminngangen for å kompensere for avviket til den kontrollerte variabelen forårsaket av forstyrrelsen. Derfor, i slike systemer, er kontrollhandlingen en funksjon av den forstyrrende handlingen.
i systemer med prinsippet om kontroll ved forstyrrelse for dannelsen av kontrollhandlingen u(t) direkte informasjon om den forstyrrende effekten brukes. Derfor, i disse systemene, er det mulig å fullt ut kompensere for påvirkningen av den forstyrrende handlingen på den kontrollerte verdien X exit . Graden av kompensasjon for påvirkningen av den forstyrrende påvirkningen avhenger av nøyaktigheten av målingen av den forstyrrende påvirkningen og egenskapene til op-ampen.
Fordelen med ACS med prinsippet om forstyrrelseskontroll er at de lar deg kompensere fullt ut for den forstyrrende effekten. Slike automatiske kontrollsystemer er åpne sløyfe, derfor, som i ethvert åpen sløyfesystem, er det ikke noe stabilitetsproblem her.
Dersom det er flere forstyrrende påvirkninger i systemet, kan alle kompenseres separat på samme måte, dersom det er mulig å måle dem. Dette kompliserer imidlertid systemet. I praksis kompenseres kun forstyrrende påvirkninger, som kraftigst påvirker den kontrollerte verdien og forårsaker betydelige avvik fra den nødvendige verdien. Slike forstyrrelser kalles grunnleggende. Mindre forstyrrelser kalles forstyrrelser som kun forårsaker mindre avvik av den kontrollerte verdien fra innstilt verdi.
Ulempen med slike ACS er at de eliminerer påvirkningen av bare de viktigste forstyrrelsene. I tillegg reduseres nøyaktigheten av regulering og kompensasjon når egenskapene til op-ampen endres.
Forstyrrelseskontrollprinsippet brukes i systemer designet for å opprettholde en konstant kontrollert variabel.
PRINSIPP FOR AVBØYINGSKONTROLL
Automatisk regulering kjennetegnes ved at styringsfunksjonene er avhengig av det faktiske produksjonsforløpet prosess for å opprettholde den nødvendige ytelsen dette prosess. Kontroll og informasjon om de faktiske verdiene til indikatorene for denne prosessen utføres ved hjelp av tilbakemelding.
I det generelle tilfellet kan et slikt automatisk kontrollsystem vises i fig. 1.2, b. Systemet bruker lukket sløyfekontroll (tilbakemeldingsprinsipp eller avvikskontroll). Kontrollavviket er differansen mellom faktisk målt verdi og innstilt verdi. Den gjensidige forskjellen mellom settpunktet og den faktiske verdien kalles kontrollfeilen. Styringsanordningen forstås som en teknisk innretning ved hjelp av hvilken styreobjektet styres automatisk.
Kontrollert verdi X exit bestemt av kjørepåvirkningen X i = X h ved inngangen til systemet, det vil si påvirkningen introdusert i systemet og bestemme den nødvendige endringsloven i den kontrollerte variabelen. Ved inngangen til systemet til sammenligningselementet, i tillegg til masterhandlingen, mates den faktiske verdien av den kontrollerte variabelen gjennom tilbakekoblingskretsen. Ved utgangen av sammenligningselementet, dvs. ved inngangen til kontrollenheten CU vises et avvik eller kontrollhandling
![]() ,
,
som gir en endring i den kontrollerte verdien i henhold til en gitt lov.
Kontrollenheten, avhengig av størrelsen og tegn på kanselleringen, genererer en regulatorisk handling og. Dermed tar prinsippet om lukket kontroll ikke bare hensyn til oppgaven, men også den faktiske tilstanden til kontrollobjektet og de eksisterende forstyrrelsene. Derfor er dette prinsippet det mest universelle og lar deg løse kontrollproblemer med hell, til tross for usikkerheten til kontrollobjektet og arten av forstyrrelser.
Klassen av slike automatiske systemer, bygget på grunnlag av prinsippet om lukket kontroll, kalles automatiske kontrollsystemer (ACS). Egenskapen til universalitet til slike systemer gjør at de kan brukes veldig mye i teknologi og natur.
Tilbakemelding i lukkede automatiske kontrollsystemer tjener til å danne de statiske og dynamiske egenskapene til systemet. Disse egenskapene bestemmes av formålet med det automatiske kontrollsystemet og kravene som stilles til det av den teknologiske prosessen. Tilbakemelding kontrollerer forløpet av prosessen, og i tilfelle avvik fra den spesifiserte, blir korrigerende signaler overført til inngangen til systemet eller til inngangen til en gruppe elementer som dekkes av denne tilbakemeldingen.
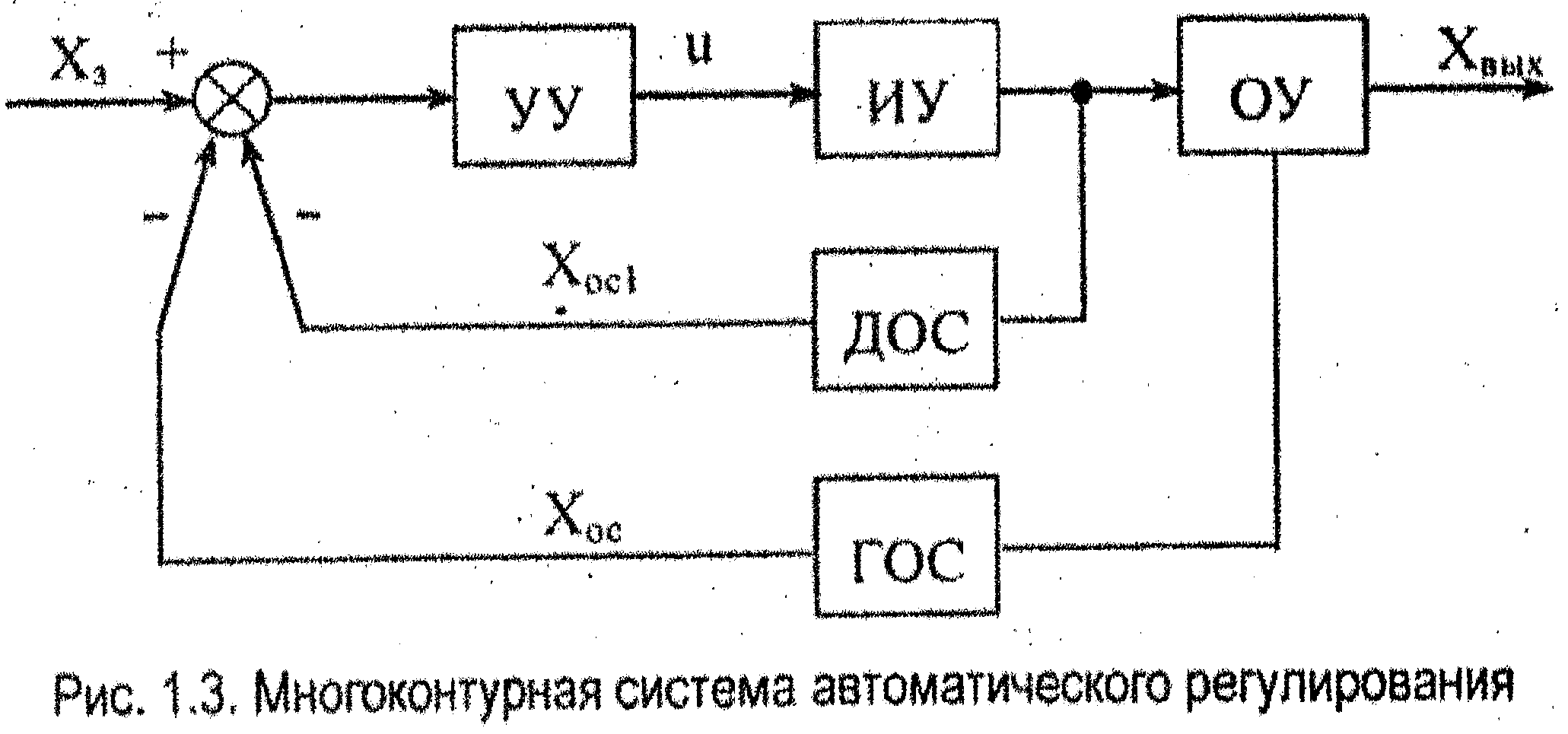
ACS må ha minst én tilbakemelding, som tjener til å sammenligne de faktiske og innstilte verdiene til den kontrollerte variabelen. Slike tilbakemeldinger kalles den viktigste. Den kobler systemets utgang med inngangen, og dekker alle hovedelementene. Systemer som har én hovedtilbakemelding (GOS) kalles single-loop. Noen ACS, i tillegg til hovedtilbakemeldingene (GOS), hvis antall bestemmes av antallet (GOS) kontrollerte variabler, kan ha flere ekstra (lokale). Ekstra tilbakemelding (DOS) kobler utgangen til ett eller flere elementer i systemet. ACS som i tillegg til den viktigste har en eller flere ekstra tilbakemeldinger kalles multi-loop (fig. 1.3).
Avhengig av arten av den overførte påvirkningen, er tilbakemeldinger delt inn i stive og fleksible. Stive tilbakemeldinger fungerer både i steady state og i transient modus. Fleksible tilbakemeldinger fungerer bare i forbigående moduser. Midlene for å implementere hard feedback er forskjellige måleenheter - sensorer som overfører et signal til sammenligningsnoden. Midlene for å implementere fleksible tilbakemeldinger er differensierings- og integreringsenheter.
I henhold til effekten på systemet er tilbakemeldinger delt inn i positive og negative. Positivt hvis styresignalet på inngangen øker med en økning i utgangssignalet, og negativt hvis styresignalet ved inngangen avtar med en økning i utgangssignalet.
Ulemper med forstyrrelseskontrollerte systemer kan elimineres ved å bruke kombinerte styringssystemer, hvor forstyrrelseskontroll kombineres med avvikskontroll. I dette tilfellet elimineres påvirkningen på kontrollprosessen til hovedforstyrrelsen. I tillegg, på grunn av tilstedeværelsen av tilbakemelding på den kontrollerte verdien , effekten av mindre forstyrrelser er begrenset. Noen ganger kalles disse systemene åpen-lukket. De har en relativt høy nøyaktighet for å opprettholde en gitt kontrollert verdi.
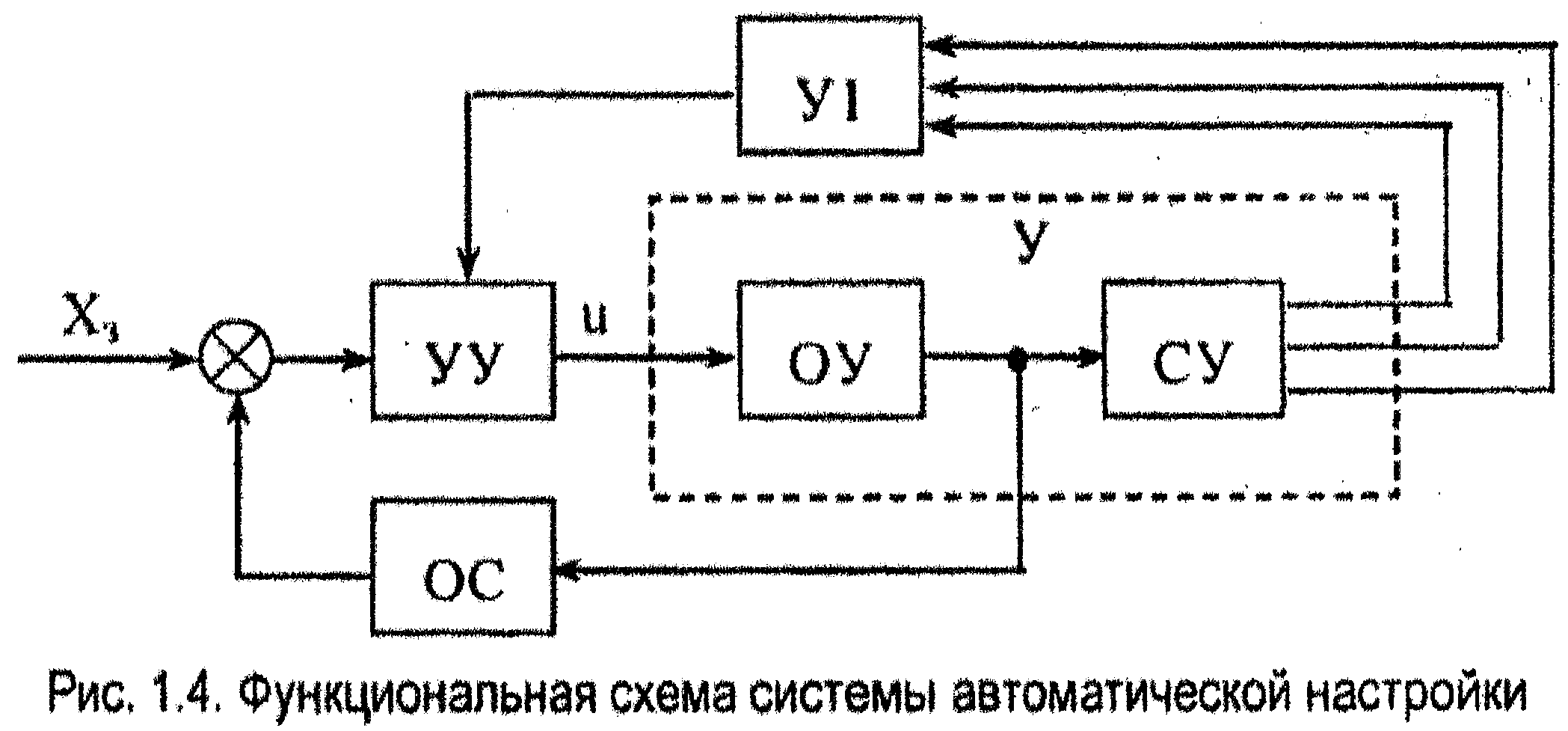
Funksjonsdiagrammet til kontrollsystemet, som gir innstilling og valg av den nødvendige kontrollalgoritmen avhengig av endringen i driftsforhold og parametere til kontrollobjektet, er vist i fig. 1.4.
| Innhold | 2 | |
| Introduksjon | 3 | |
| 1. | en felles del | |
| 1.1. | Enkle konsepter | 6 |
| 1.2. | Beskrivelse av det originale automatiske kontrollskjemaet | 9 |
| 1.3. | Utvikling av et funksjonsdiagram av ATS | 13 |
| 2. | Oppgjørsdel | |
| 2.1. | Parametrisk syntese og analyse av en enkeltsløyfe ACS | 14 |
| 2.1.1. | Evaluering av muligheten for statisk kontroll | 15 |
| 2.1.2. | Evaluering av muligheten for astatisk kontroll | 20 |
| 2.1.3. | Studie av kvaliteten på en enkeltsløyfe ATS | 22 |
| 3. | Utvikling av en kontrollsløyfe med en gitt parameter | 25 |
| Konklusjon | 27 | |
| Bibliografi | 28 |
Introduksjon
Den moderne teorien om automatisk kontroll er hoveddelen av kontrollteorien. Det automatiske kontrollsystemet består av et justerbart objekt og kontroller som virker på objektet når en eller flere justerbare variabler endres. Under påvirkning av inngangssignaler (kontroll eller forstyrrelse), endres de kontrollerte variablene. Hensikten med regulering er å danne slike lover, der de utgangsregulerte variablene vil avvike lite fra de nødvendige verdiene. Løsningen av dette problemet er i mange tilfeller komplisert av tilstedeværelsen av tilfeldige forstyrrelser (støy). I dette tilfellet er det nødvendig å velge en slik kontrolllov der styresignalene vil passere gjennom systemet med lave forvrengninger, og støysignalene praktisk talt ikke vil bli overført.
Teorien om automatisk kontroll har kommet langt i utviklingen. I den innledende fasen ble det laget metoder for å analysere stabiliteten, kvaliteten og nøyaktigheten av regulering av kontinuerlig lineære systemer. Deretter metodene for analyse av diskrete og diskrete- kontinuerlige systemer. Det kan bemerkes at metodene for beregning av kontinuerlige systemer er basert på frekvensmetoder, og beregningen av diskrete og diskrete kontinuerlige systemer er basert på z-transformmetoder.
For tiden utvikles metoder for analyse av ikke-lineære automatiske kontrollsystemer. Brudd på superposisjonsprinsippet i ikke-lineære systemer, tilstedeværelsen av en rekke vekslende (avhengig av virkningen) regimer med stabile, ustabile bevegelser og selvsvingninger kompliserer analysen deres. Designeren møter enda større vanskeligheter ved beregning av ekstreme og selvjusterende kontrollsystemer.
Både teorien om automatisk kontroll og teorien om kontroll inngår i vitenskapen under det generelle navnet "teknisk kybernetikk", som nå har fått en betydelig utvikling. Teknisk kybernetikk studerer de generelle mønstrene for kompleks dynamiske systemer teknologisk og produksjonsprosesser. Teknisk kybernetikk, automatisk kontroll og automatisk regulering utvikler seg i to hovedretninger: den første er forbundet med konstant fremgang og forbedring i utformingen av elementer og teknologien for deres produksjon; den andre - med den mest rasjonelle bruken av disse elementene eller deres grupper, som er oppgaven med å designe systemer.
Utformingen av automatiske kontrollsystemer kan utføres på to måter: ved analysemetoden, når, med en forhåndsvalgt systemstruktur (ved beregning eller modellering), dens parametere bestemmes;
syntesemetode, når systemet umiddelbart velges i henhold til kravene
dens beste struktur og parametere. Begge disse metodene er vidt utbredt praktisk bruk og er derfor fullstendig dekket i denne boken.
Å bestemme parametrene til systemet, når dets struktur og krav for hele systemet som helhet er kjent, refererer til synteseproblemet. Løsningen på dette problemet med et lineært kontrollobjekt kan finnes ved å bruke for eksempel frekvensmetoder, rotlokusmetoden, eller ved å studere banene til røttene til den karakteristiske ligningen til et lukket system. Valg av korrigerende enhet ved syntese i klasserommet rasjonelle brøkfunksjoner kompleks variabel kan utføres ved hjelp av grafisk-analytiske metoder. De samme metodene gjør det mulig å syntetisere korrigerende enheter som undertrykker selvoscillerende og ustabile periodiske moduser i ikke-lineære systemer.
Syntesemetoder ble videreutviklet på grunnlag av prinsippene om maksimal og dynamisk programmering, når den optimale kontrollloven ut fra et gitt kvalitetskriteriums synspunkt bestemmes, som gir den øvre grensen for systemets kvalitet, som må være etterstrebet ved utformingen av den. Imidlertid er løsningen av dette problemet praktisk talt ikke alltid mulig på grunn av kompleksiteten til den matematiske beskrivelsen av de fysiske prosessene i systemet, umuligheten av å løse selve optimaliseringsproblemet og vanskelighetene med den tekniske implementeringen av den funnet ikke-lineære kontrollloven. Det skal bemerkes at implementering av komplekse kontrolllover bare er mulig når en digital datamaskin er inkludert i systemsløyfen. Opprettelsen av ekstreme og selvjusterende systemer er også forbundet med bruk av analoge eller digitale datamaskiner.
Dannelsen av automatiske kontrollsystemer utføres som regel på grunnlag av analytiske metoder for analyse eller syntese. På dette stadiet av utformingen av kontrollsystemer, basert på de aksepterte forutsetningene, kompileres en matematisk modell av systemet og dets foreløpige struktur velges. Avhengig av type modell (lineær eller ikke-lineær), velges en beregningsmetode for å bestemme parametrene som gir de spesifiserte indikatorene for stabilitet, nøyaktighet og kvalitet. Etter det blir den matematiske modellen raffinert og ved hjelp av midlene matematisk modellering bestemme de dynamiske prosessene i systemet. Under påvirkning av forskjellige inngangssignaler blir frekvenskarakteristikkene tatt og sammenlignet med de beregnede. Deretter er stabilitetsmarginene til systemet i fase og modul endelig etablert og hovedkvalitetsindikatorene funnet.
Videre innstilling av typiske kontrollhandlinger på modellen; fjerne egenskapene til nøyaktighet. På grunnlag av matematisk modellering utarbeides tekniske krav til systemutstyret. En kontroller settes sammen fra det produserte utstyret og overføres til semi-naturlig modellering, der kontrollobjektet samles i form av en matematisk modell.
I henhold til egenskapene som er oppnådd som et resultat av HIL-modellering, tas det en beslutning om kontrollenhetens egnethet til å arbeide med et reelt reguleringsobjekt. Det endelige valget av regulatorparametrene og justeringen av dem utføres under naturlige forhold under den eksperimentelle utviklingen av kontrollsystemet.
Utviklingen av teorien om automatisk kontroll basert på ligningene for tilstand og z-transformer, maksimalprinsippet og den dynamiske programmeringsmetoden forbedrer metoden for å designe kontrollsystemer og lar deg lage svært effektive automatiske systemer for det meste ulike bransjer Nasjonal økonomi. De automatiske kontrollsystemene oppnådd på denne måten sikrer høy kvalitet på produktene, reduserer kostnadene og øker arbeidsproduktiviteten.
1. Generell del.
1.1. Enkle konsepter
Konvertering av systeminndata (kontrollhandling) inn i utgangssignalet (justerbar verdi) bestemmer loven om endring av den regulerte verdien. Realisering av ønsket loven implementeres som et resultat formasjon kontrollvariabler, som påvirker det kontrollerte systemet. Lovene for endring av den regulerte verdien i tid kan være forskjellige; matematisk er de beskrevet systemoperatør. Denne operatoren kan realisere utgangssignalets proporsjonale avhengighet av inngangen, forholdet i form av en derivert eller integral osv. I et mer generelt tilfelle kan denne operatoren også være ikke-lineær.
Det skal bemerkes at lovene for endring av kontrollerte verdier i maskiner og enheter brytes under påvirkning av ytre og noen ganger indre påvirkninger, kalt forstyrrelser. (eller forstyrrende påvirkninger). Fra definisjonen av disse påvirkningene kan det ses at det automatiske kontrollsystemet skal gjengi kontrollhandlingen så nøyaktig som mulig og reagere minst mulig på den forstyrrende handlingen.
Det er tre ulike prinsipper konstruksjon av kontrollsystemer som sikrer implementeringen av den nødvendige endringsloven i den kontrollerte variabelen: åpen sløyfe, lukket sløyfe, kombinert sløyfe forskrift (lukket-åpen). Prinsippet for en åpen syklus er å sikre den nødvendige loven for endring av den kontrollerte variabelen direkte ved å konvertere kontrollhandlingen. Prinsippet om en lukket syklus er preget av en sammenligning av kontrollhandlingen med den faktiske endringen i den kontrollerte variabelen på grunn av applikasjonen tilbakemelding og sammenligningselement. Feilsignalet som følge av sammenligningen bør ikke overstige en viss forhåndsbestemt verdi. På grunn av dette sikres den nødvendige loven om endring av den kontrollerte variabelen i lukkede systemer. Det kombinerte prinsippet består i kombinasjonen av lukkede og åpne sløyfer i ett system.
Automatisk kontroll kalt prosessen der
operasjoner utføres av et system som opererer uten menneskelig innblanding i samsvar med en forhåndsbestemt algoritme.
Et automatisk system med en lukket påvirkningskrets, der kontroll (regulatorisk) handling genereres som et resultat av å sammenligne den sanne verdien av den kontrollerte (justerbare) mengden med dens gitte (foreskrevne) verdi, kalles ASR.
Produksjonsprosess- et sett med innbyrdes relaterte arbeids- og teknologiske prosesser, under gjennomføringen av hvilke råvarer og halvfabrikata konverteres til ferdige produkter.
Automatisk er enhetene som kontrollerer ulike prosesser og kontrollere dem uten direkte menneskelig innblanding.
Emnet eller prosessen som skal studeres kalles gjenstand, og alle omkringliggende objekter som samhandler med dem - eksternt miljø.
System- et sett med elementer eller enheter som er i relasjoner og forbindelser med hverandre og danner en viss integritet (enhet).
Kontrollobjekt- et sett med teknologiske enheter (maskiner, verktøy, mekanisering) som utfører denne prosessen fra ledelsens synspunkt.
Kontroll operasjon- gir til rett tid begynnelsen, sekvensen og avslutningen av arbeidsoperasjoner, tildeler ressursene som er nødvendige for gjennomføringen.
Under ledelse forstå prosessen med å organisere en slik målrettet innvirkning på kontrollobjektet, som et resultat av at sistnevnte går inn i den nødvendige (formålsbestemte) tilstanden.
Parametrene til en produksjonsprosess eller en prosess eller et prosessobjekt som hele tiden må vedlikeholdes eller endres i henhold til en viss lov kalles kontrollert mengde.
Verdien av den kontrollerte variabelen, som ifølge oppgaven skal være på et gitt tidspunkt, kalles den gitte verdien av den kontrollerte variabelen (kontrollert parameter).
Et diagram som viser sekvensen av prosesser i en enhet eller et system kalles strukturdiagram.
Link- et element inkludert i ACS der inngangsparameteren konverteres på en bestemt måte til utdataparameteren (den er skjematisk avbildet som en blokk, men gjenspeiler ikke funksjonene i designet).
Informasjon er alltid knyttet til en materialbærer av en eller annen fysisk mengde. PÅ tekniske systemer slike bærere kalles signalbærere(for eksempel elektriske spenninger og strøm, trykk, mekanisk bevegelse osv.), som kan endres i samsvar med den overførte informasjonen.
1.2. Beskrivelse av det originale automatiske kontrollskjemaet.
Siden det regulerte objektet er et element eller et ledd i ACP, avhenger egenskapene til ACP primært av egenskapene til det regulerte objektet. Derfor, for å skape en brukbar ACP som gir den nødvendige kvaliteten på reguleringen, er det først og fremst nødvendig å kjenne egenskapene til det regulerte objektet (spastisk og dynamisk).
Objektet for regulering av laboratoriestanden er et objekt med distribuerte parametere, siden den kontrollerte verdien (temperaturen) er ikke den samme på forskjellige punkter av objektet både i likevektstilstand og i overgangsmodus.
For å øke tregheten til objektet, som skal være ti ganger større enn det som måles i dette objektet av sensoren, er det gitt en metallkopp fylt med spon, der temperatursensoren er plassert. Dette lar deg øke varmevolumet til objektet.
Den nødvendige temperaturen (referansen) stilles inn av enheten ved inngangen til regulatoren (t e).
Forstyrrelse
Ris. 1. Reguleringsordning.
Den faktiske temperaturen konverteres til et signal av enheten t f. Ved å betegne signalene ved utgangen til disse enhetene med bokstaver som ligner på dem, uttrykker vi det faktiske avviket fra det nødvendige i form av et signal: ∆t = t e - t f; kalt avvik eller mismatch. Kontrolleren konverterer ∆t i henhold til en viss kontrolllov og slår på aktuatoren. I vårt tilfelle er regulatorens oppgave likviditeten til avvik ∆t forårsaket av virkningen av forstyrrelser B, dvs. ulike belastninger på kontrollobjekter (endringer i omgivelsestemperatur, endringer i posisjonen til porten, etc.).
En feil ∆t kan også oppstå på grunn av endring i t e, men siden det er en funksjon som er kjent på forhånd, kan feilen også beregnes på forhånd og kompenseres. Et slikt system kalles et programkontrollsystem eller ganske enkelt ACS.
Stativet gir to-posisjonsregulering. I dette tilfellet er det nødvendig å åpne spjeldet slik at det elektriske varmeelementet hele tiden blåses av luft. Temperaturen styres ved å slå varmeelementet på eller av med reléelementet.
For å bestemme de dynamiske egenskapene til objektet, er det installert en selvopptaksenhet i stativet, som registrerer temperaturendringer i objektet og fikserer dem på et kartbånd.
Enhver teknologisk enhet som er gjenstand for regulering av OR opererer i en stabil tilstand hvis material- og energibalansen er fullt observert i den. Hovedparameteren som karakteriserer forholdene for flyten av den teknologiske prosessen (i vårt objekt er det temperatur) forblir uendret i stabil tilstand.
Avhengigheten av utgangsverdien av inngangsverdien i stabil tilstand kalles den statiske karakteristikken til OR. Statiske egenskaper kan være både lineære, med forskjellige helningskoeffisienter, og ikke-lineære, mens de fleste virkelige objekter generelt har ikke-lineære.
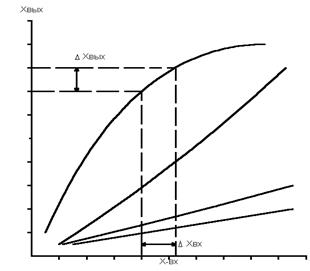
Fig 1.1. Statiske egenskaper ved OR.
Disse egenskapene til OR gjør det mulig å vurdere graden av forbindelse mellom ulike inngangs- og utgangsverdier til objektet.
Statiske egenskaper bestemmes ved beregning eller eksperimentelt.
Dynamisk karakteristikk av det regulerte objektet kalles utgangsverdiens avhengighet av inngangsverdien i transientmodus.
Siden endringene i utgangsverdien til RR under forskjellige forstyrrelser kan skje på forskjellige måter, brukes vanligvis typiske ytre påvirkninger for å studere de dynamiske egenskapene til et objekt.
Temperatur-ACS-akselerasjonskurven (Fig. 1.2.) indikerer de dynamiske egenskapene til OR.
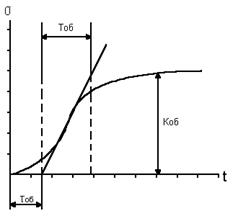
Fig. 1.2. Akselerasjonskurve
Figuren viser at objektet har evnen til gradvis å stoppe avviket til utgangsverdien fra startverdien og likevektstilstanden gjenopprettes igjen, dvs. objektet har egenskapen for selvjustering. Slike objekter kalles statiske.
Objektet har en forsinkelse T om, og siden Det er ikke vesentlig og vil bli neglisjert i det følgende.
Tidskonstanten til objektet T om er den betingede tiden i løpet av hvilken utgangsverdien ville endret seg fra startverdien til en ny stabil tilstandsverdi hvis denne endringen skjedde med en hastighet som er konstant og maksimal for en gitt transient. Tidskonstanten karakteriserer tregheten til et objekt, som forstås som dets evne til sakte å akkumulere og konsumere materie og energi, noe som blir mulig på grunn av tilstedeværelsen av motstander og kapasitanser i OR som forhindrer deres inn- og utgang.
Overføringskoeffisienten K om OR er en endring i utgangsverdien til objektet under overgangen fra den initiale til den nye til den stabile tilstanden, referert til en enkelt forstyrrelse ved inngangen.
En enkelt forstyrrelse regnes som en prosent endring i inngangsverdien til objektet (forskyvning av reguleringsorganet).
På denne måten:

hvor x o er verdien av utgangsmengden i den innledende stabile tilstanden; X(∞)– også, men for en ny steady state; ∆Х inn er størrelsen på den introduserte forstyrrelsen; % slag av regulatoren.
1.3. Utvikling av et funksjonsdiagram av ACS.
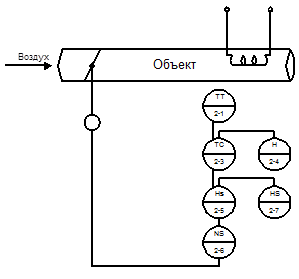
Figur 2. Tre-posisjons kontrollsløyfe.
Reguleringsobjektet er statisk i sine funksjoner med selvjustering med en overføringsforsinkelse, noe som bidro til valget av en proporsjonal-integrert kontroller.
Kretsen inkluderer å måle temperaturen på kjølevæsken og sammenligne med oppgaven, regulatoren gjennom HS - manuell kontrollenhet, slår på kontakten "mer" eller "mindre" kontaktløs starter NS, som igjen styrer aktuatoren, dvs. lufttilførsel til kjølevæsken.
Med to-posisjonsregulering regulerer reléelementet inkluderingen av kjølevæsken.
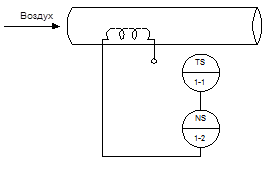
Figur 3. To-posisjons kontrollsløyfe.
Når en viss temperatur er nådd, slår starteren av spenningsforsyningen til det elektriske varmeelementet. Måling og regulering av temperatur utføres av en dynamometrisk sensor - et temperaturrelé.
2. Oppgjørsdel.
2.1. Parametrisk syntese og analyse av single-loop ACS.
Analysen av automatiske kontrollsystemer med elementer av elektroautomatikk utføres ved å bruke de algebraiske kriteriene til Gauss og Hurwitz, Lyapunov-kriteriet, frekvenskriteriene til Mikhailov, Nyquist - Mikhailov, etc.
Ved analyse av ACS studeres stabilitetsproblemer og andre kvalitative indikatorer for åpen og lukket ACS, stabilitetsmarginer finnes i modul og fase, astatisme av lukkede systemer, feilrater for servosystemer osv. bestemmes.
De viktigste kvalitative indikatorene for systemer, som bestemmes etter å ha funnet de såkalte h-funksjonene, inkluderer følgende:
1. Tiden for den forbigående prosessen t p, hvoretter den kontrollerte verdien vil forbli nær den stabile verdien;
2. Jevn verdi av den kontrollerte variabelen h¥=limh(t)=h y ;
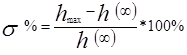
3.Maksimal overskridelse y=(h maks -h y)/h y (her er h max verdien av det første maksimum);
4. Oscillasjonsfrekvens w=2p/T (her er T oscillasjonsperioden);
5. Antall oscillasjoner av den transiente prosessen n;
6.Tid for å nå det første maksimum t max ;
En viktig indikator på kvaliteten til ACS er deres pålitelighet. Kvalitative indikatorer bestemmes ved å løse differensiallikninger, som beskriver allerede kjente ACS-strukturer.
Syntese av ACS består i å finne strukturer og parametere som vil oppfylle de gitte kvalitetsindikatorene. Syntese er en vanskeligere oppgave enn analyse. Hovedmetodene som brukes i syntesen av ACS er analytiske, grafisk-analytiske og maskinelle (ved hjelp av datamaskiner).
2.1.1. Evaluering av mulighet for statisk regulering.
Ved valg av kontroller er det nødvendig å kjenne den numeriske dynamiske informasjonen om reguleringsobjektet, dvs. K 0 ; T om; t 0 , som vi bestemmer ved akselerasjonskarakteristikken.
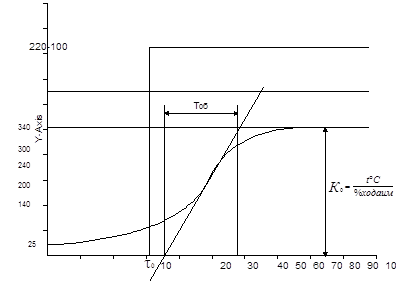
Fig. 4. Akselerasjonskurve for ACS-temperaturen til laboratoriestanden.
Type regulator er foreløpig valgt i forhold til t/T ca;
Kriterier for valg av regulatorer etter type handling.
For å studere og beregne det strukturelle diagrammet til ASR ved hjelp av ekvivalente transformasjoner, er det nødvendig å redusere det til den enkleste standardformen for objektregulatoren. Dette er nødvendig for det første for å bestemme overføringsfunksjonene, og følgelig de matematiske avhengighetene som bestemmer de forbigående prosessene i systemet, og for det andre, som regel, er alle tekniske metoder for å beregne og bestemme innstillingene til kontrollerene. brukt på en slik standardstruktur.
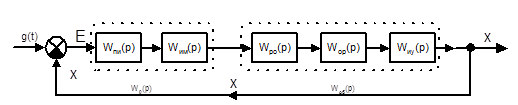
Så det originale blokkdiagrammet for temperaturen ACS i henhold til et typisk funksjonsdiagram (se tegninger) kan representeres som vist i figuren.
Der W P (p), W IM (p), W PO (p), W OP (p), W IU (p), er overføringsfunksjonene til henholdsvis kontrolleren, aktuatoren, reguleringsorganet, kontrollobjektet og måleenheten .
På strukturdiagrammet skal alle påvirkninger (signaler) angis i Laplace-transformert form.
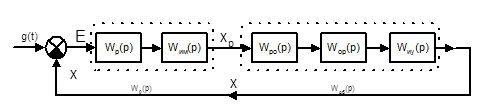
Figur 5. Transformert blokkdiagram av ACS (t).
Alle koblinger som bestemmer de dynamiske egenskapene til grensesnittnoder (forbindelser, sammenkoblinger) til et objekt med en regulator (for eksempel reguleringsorganer, kommunikasjonslinjer, måleenheter, sensorer, etc.), anbefales det som regel å referere til gjenstanden for regulering.
Hvis kontrolleren og aktuatoren implementerer kontrollloven direkte i systemet, er overføringsfunksjonen til kontrolleren
W P (p) \u003d W y (p) W IM (p)
Statisk regulering er preget av tilstedeværelsen av en P-regulator, da
W P (p) \u003d K reg
Ved optimering av verdiene, i henhold til eksperimentelle data, er det tilrådelig å ta K - koeffisienten til regulatoren for å ta K = 10
Overføringsfunksjonen til det regulerte objektet, tatt i betraktning koblingene knyttet til selve objektet, har formen:
W ca (p) \u003d W PO (p) W OP (p) W IU (p)
I det generelle tilfellet kan enhver endimensjonal ACS med hovedtilbakemelding, ved gradvis å styrke koblingene, reduseres til den enkleste formen, overføringsfunksjonen til et åpent system, som
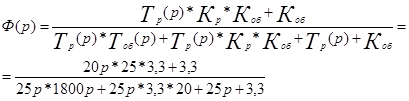
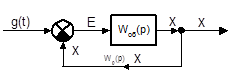 W(p)=W P (p)*W OB (p)
W(p)=W P (p)*W OB (p)
Temperatur-ACS-akselerasjonskurven viser at objektet er treghet, statisk og har en forsinkelse, siden forsinkelsen er ubetydelig. I videre forskning kan de neglisjeres. Da vil overføringsfunksjonen til objektet se slik ut:
W ca (p) \u003d K ca / (T ca p + 1)
Overføringsfunksjon til et åpent system
W(p)=W P (p)*W OB (p)
 - med statisk regulering.
- med statisk regulering.
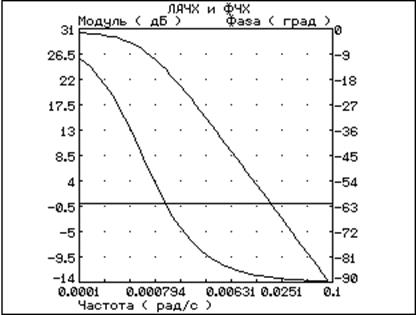
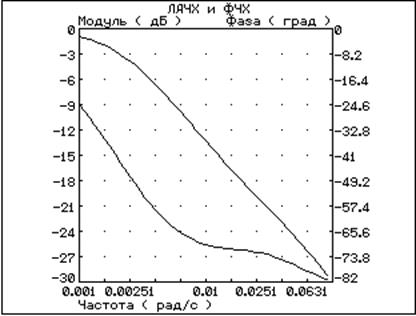
Fig 6. LAFC og LFC for objektet.
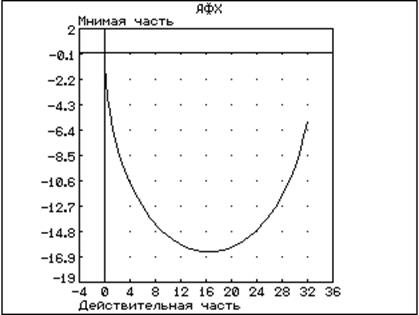
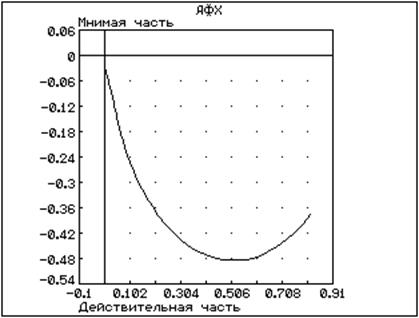
Fig 7. AFC for et objekt.
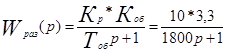
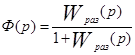
La oss finne overføringsfunksjonen til det lukkede systemet:
Fordi verdien av tidskonstantene bestemmes designfunksjoner elementer i systemet, så utføres justeringen av kontrollsystemet bare ved å endre dets koeffisient K ved å påvirke overføringskoeffisienten Kp til kontrolleren.
For å bestemme stabiliteten til systemet bygger vi amplitude-frekvens, fase-frekvenskarakteristikkene på en logaritmisk skala og bygger en hodograf ved hjelp av et lukket system.
![]()
Fig. 8. LAHCH og LPCH med statisk regulering.
Figur 9. Amplitude-fasekarakteristikk for et lukket system.
I følge grafene ser vi at med koeffisienten til regulatoren K p = 10, er stabilitetsmarginen oppfylt, fordi ved grensefrekvensen wav er fasen mindre enn 180°, noe som karakteriserer stabiliteten til systemet under statisk kontroll, noe som betyr at det er mulig å bruke en P-kontroller for temperatur ACS.
2.1.2. Evaluering av muligheten for astatisk regulering.
Et av tegnene på en astatisk kobling (eller systemet som helhet) er tilstedeværelsen av en kompleks variabel P som en faktor i nevneren til overføringsfunksjonen, dvs. tilstedeværelsen av en integrerende komponent.
La oss vurdere muligheten for en PI-lov for temperatur-ACS-kontroll. For å gjøre dette vil vi bygge et blokkdiagram der vi inkluderer en PI-kontroller.
Figur 10. Strukturopplegg SAR temperatur.
Overføringsfunksjonen til PI-kontrolleren har formen
WP(p)=K+l/Tp; (K=20; Tu=25 sek.)
La oss finne overføringsfunksjonen til et åpent system
W ganger (p) \u003d W p (p) W ca (p)
Finn overføringsfunksjonen til et lukket system
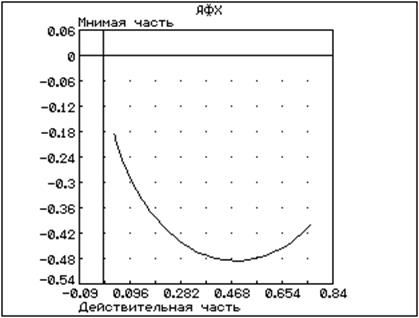
Basert på overføringsfunksjonen til det åpne systemet bygger vi LFC og LFC, og funksjonen til det lukkede systemet bygger vi AFC.
Figur 11. Amplitude-fasekarakteristikk for et lukket system.
Figur 12. LAFC og LPFC med astatisk regulering.
Frekvenskarakteristikkene viser at systemet har en stabilitetsmargin, både i amplitude og i fase, siden ved grensefrekvens w avg fase< 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Undersøkelse av kvaliteten på et enkeltkrets automatisk kontrollsystem.
Til automatiske systemer regulering stiller krav ikke bare til bærekraften. For ytelsen til systemet er det ikke mindre nødvendig at prosessen med automatisk kontroll ved visse kvalitetsindikatorer.
Kravene til kvaliteten på reguleringsprosessen i hvert enkelt tilfelle kan være svært forskjellige, men av alle kvalitetsindikatorene kan flere av de mest betydningsfulle skilles ut, som bestemmer kvaliteten på nesten alle AVS-er med tilstrekkelig fullstendighet.
Kvaliteten på systemreguleringsprosessen blir som regel evaluert av dens overgangsfunksjon.
De viktigste kvalitetsindikatorene er: - reguleringstid t p - er tiden der, fra det øyeblikket innvirkningen på systemet påføres, avvikene til den kontrollerte verdien Dh(t) fra dens steady-state verdi h 0 =h( ¥) vil være mindre enn den forhåndsinnstilte verdien E Det antas vanligvis at etter at reguleringstiden er gått, bør avviket til den regulerte verdien fra steady-state verdien ikke være mer enn E = 5 %. Dermed bestemmer reguleringstiden varigheten (hastigheten) av den transiente prosessen.
Oversving s er det maksimale avviket Dh max for den kontrollerte variabelen fra den stabile verdien, uttrykt som en prosentandel av h 0 =h(¥).
Den absolutte verdien av Dh max bestemmes fra transientkurven:
Dh maks \u003d h maks - t (¥)
Følgelig vil overskridelsen være lik:
Oscillasjonen til systemet er preget av antall svingninger av den kontrollerte verdien i løpet av reguleringstiden t p. Hvis den forbigående prosessen i systemet i løpet av denne tiden gjør antallet svingninger mindre enn den spesifiserte, anses det for at systemet har den nødvendige kvaliteten på reguleringen når det gjelder svingningen;
Konstant feil E. Den stabile verdien til den kontrollerte variabelen h 0 ved slutten av den transiente prosessen avhenger av systemets astaticisme n. PÅ statiske systemer(n=0) – steady-state feil ved konstant verdi inngangshandlingen er ikke lik 0, og derfor vil den stabile verdien til den kontrollerte variabelen h 0 avvike fra dens innstilte verdi med verdien av steady-state feilen.
For kanalen for den forstyrrende påvirkningen bestemmes feilverdien av uttrykket
![]()
hvor x 0 er en konstant drivkraft; K er systemoverføringskoeffisienten.
Gjennom kanalen til den forstyrrende påvirkningen, feilverdien i henhold til uttrykket
hvor f 0 er en konstant forstyrrende handling; K om - overføringskoeffisienten til det regulerte objektet; K p - overføringskoeffisienten til regulatoren.
Ved å sammenligne de forbigående funksjonene til statisk og astatisk kontroll, velger vi den optimale kontrolleren for temperatur ACS.
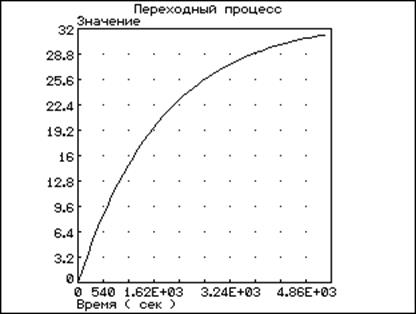
Fig. 13. Transient funksjon av ACS med P-regulator
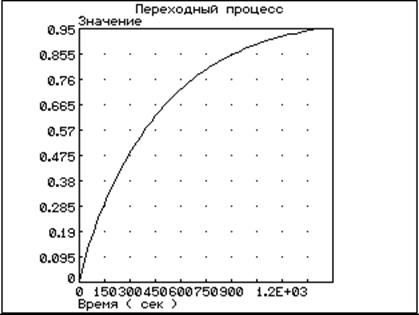
Figur 14. ACS-transientfunksjon med PI-kontroller
Grafene viser at reguleringstiden med en PI-regulator er kortere enn med en P-regulator; det betyr at for temperatur ACS er det hensiktsmessig å bruke en pulsregulator som oppfyller PI-reguleringsloven.
For beregninger ble Classic-programmet brukt på en datamaskin.
3. Utvikling av et kontrollsløyfeskjema for en gitt parameter.
Ordningene er laget i samsvar med GOST 2.710-81.
Figur 15. Tre-posisjons kontrollsløyfe.
Strømforsyningen til laboratoriestanden utføres av den automatiske strømforsyningen SF1-skjema nr. 003E3. I dette tilfellet kobles varmeelementet til styreobjektet på gjennom åpningskontakten KM 1.1. relé KM 1, og en sekundær indikerende selvopptaksenhet KSU 4. I 90 ° posisjonen til universalbryteren SA1, viftemotoren. I posisjon -45°, bryter SA1, er inkludert i posisjonsregulering, i posisjon +45° - tre-stillings regulering.
Ved 2-posisjonsregulering kobles KM1-reléviklingen på gjennom åpningskontakten til TUDE1-sensoren. Når den innstilte temperaturen på sensoren overskrides, åpnes kontakten og åpner KM1.1-kontakten, og slår av varmeelementet, som indikeres av HL4-signallampen.
Tre-posisjonsregulering er vist i diagram nr. 004E2. I automatisk modus mates det elektriske signalet fra TSMU-termomformeren sekvensielt først til inngangen til KSU4(2)-enheten, terminal 12 og går gjennom terminal 11 inn i inngangen 25 til RBI 1-P-kontrollenheten.
Et strømsignal proporsjonalt med den innstilte temperaturverdien leveres også til RBI 1-P-klemmen 21-inngang fra RZD-innstilleren.
Ved utgangen av regulatoren gir terminalene 7 og 9 signalet henholdsvis "Mindre" og "Mer" i forhold til midtpunktet på klemmen 10. Signalet går gjennom BRU og åpningskontaktene SQ1 og SQ2 til IM. aktuator, som styrer FBR-starteren, terminal 7 og 9. FBR slår på IM-kontaktene 1, 2 og 3.
I manuell kontrollmodus sendes IM av BRU-knappene "Mer" eller "Mindre".
Konklusjon
For det beregnede systemet til objektet ble følgende beregninger gjort:
Utvikling av funksjonsskjema for automatisk kontroll. Overføringsfunksjonen og strukturell transformasjon av kontrollobjektskjemaet oppnås. Frekvensegenskapene til kontrollobjektet er konstruert. Det ble foretatt en vurdering av egenskapene til et statisk kontrollobjekt (P-kontroller), samt en vurdering av muligheten for et statisk kontrollobjekt (PI-kontroller). Det ble foretatt en undersøkelse av kvaliteten på et enkeltsløyfe automatisk kontrollsystem.
Konstruksjonen av de ønskede frekvenskarakteristikkene til det korrigerte systemet er fullført. Valget og beregningen av korrigeringsanordningen utføres. Kvaliteten på det justerte systemet ble vurdert.
Utviklingen av et kontrollsløyfeskjema for en gitt parameter er fullført.
Basert på beregningene kan vi si at valget av korrigeringsanordningen ble gjort riktig og oppfyller kvalitetsindikatorene til systemet med den utførte korreksjonen.
Bibliografi.
- I.Yu. Topchev "Atlas for CAP Design"
- B.C. Chistyakov "En kort guide til termiske ingeniørmålinger"
- N.N. Ivasjtsjenko " Automatisk regulering»
4. V.V. Cherenkov "Industrielle enheter og automatiseringsmidler"
Vi anbefaler deg å lese
 Psykologiske kjennetegn ved barn i ungdomsårene
Psykologiske kjennetegn ved barn i ungdomsårene Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole
Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole, diagnose, behandling Behandling av urogenital klamydia") Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia
Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva
Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva

