Системна класификация автоматично регулиране
Системи за автоматично управление, използвани в модерна технология, са доста разнообразни. Бързо разширяване функционално предназначениефункционалната цел на автоматичните системи, която стана възможна, по-специално поради въвеждането на компютърни технологии, увеличава броя на реализираните класове системи. При тези условия е почти невъзможно да се даде пълна подробна класификация на системите за автоматично управление. Класификациите, които са били успешно прилагани в близкото минало, сега стават твърде тесни, не обхващайки нови системи, които се разработват и внедряват.
Всяка класификация се основава на определени класификационни характеристики. От гледна точка на общото класифициране на системите за автоматично управление най-удобният класификационен признак е използваната информация за обекта на регулиране. Трябва да се отбележи, че почти всички автоматични системи са нелинейни устройства, които съдържат както променливи, така и разпределени параметри, в които стойността на променливите в даден момент може да зависи не само от текущите, но и от минали стойности на тези променливи.
Всяка автоматична система се характеризира с работещ алгоритъм - набор от предписания, които определят естеството на изменението на управляваната величина в зависимост от въздействието
В зависимост от естеството на промяната в компонентите на задвижващото влияние, автоматичните системи се разделят на четири класа:
- системи за автоматична стабилизация, в които е главното действие постоянна стойност, а контролираната стойност автоматично се поддържа непроменена при произволна промяна на натоварването и външните условия. Натоварването на регулирания обект (момент на натоварване на вала на двигателя, натоварване на генератора) в стабилизиращите системи обикновено е основният смущаващ ефект, който най-рязко засяга контролираната стойност;
- системи за програмирано регулиране, при които движещата сила и регулираната стойност се променят по предварително зададен закон. Софтуерната автоматична система може да се разглежда като система за стабилизиране, в която задачата за стабилизиране се усложнява от задачата за промяна на управляваната променлива според дадена програма. Промяната на контролираната стойност според програмата се постига чрез добавяне към системата на някакъв елемент от софтуерно устройство, което променя действието на настройка във времето по предварително зададен закон;
- сервосистемите включват промяна на контролираната променлива в съответствие с промяната в движещата сила, чийто закон за промяна е неизвестна функция. По този начин серво системата, подобно на софтуерната система, възпроизвежда главното действие. Този ефект обаче в системата за проследяване не се променя по предварително зададена програма, а произволно. Например антената на радара се обръща, за да следва самолета, чиято траектория не е известна предварително, т.е. „следва го“. Ето откъде идва системата за проследяване на имена. Главните влияния и контролираните стойности на сервосистемите могат да имат разнообразен характер по своята физическа природа. Освен това контролираната стойност по своята физическа природа може да се различава от настройващото действие.
-
системите за оптимално управление осигуряват оптимално поддържане на регулираната величина по един или друг критерий за оптималност
В зависимост от това какъв математически модел описва процесите в автоматичните системи, те се разделят на:
- линейни автоматични системи, чийто математически модел е съставен от линейни или линеаризирани диференциални уравнения. Ако в уравнението на динамиката на която и да е връзка на линейна автоматична система има поне един или няколко променливи във времето коефициенти, тогава се получава линейна автоматична система с променливи параметри. Ако някоя връзка е описана с линейни частични диференциални уравнения, тогава автоматичната система ще бъде линейна автоматична система с разпределени параметри. Обратно, обикновената линейна автоматична система е автоматична система с групирани параметри. Ако е описана динамиката на която и да е връзка в автоматичната система линейно уравнениесъс забавен аргумент, тогава автоматичната система се нарича линейна автоматична система със закъснение;
- нелинейни автоматични системи, чийто математически модел е съставен от нелинейни диференциални уравнения. Нелинейните автоматични системи включват всички автоматични системи, в връзките на които има статични характеристики на някой от многото видове нелинейност. Нелинейни могат да бъдат автоматични системи с променливи параметри, с разпределени параметри, със закъснение, импулсни и цифрови автомати, ако някъде в тях е нарушена линейността на уравнението на динамиката.
Класификация на системите за автоматично управление
Всяка автоматична система се състои от множество звена, свързани помежду си по подходящ начин. Всяка отделна връзка има вход и изход, които определят въздействието и трансфера на информация от една връзка към друга. AT общ случайвсяка връзка може да има няколко входа и изхода. Входните и изходните величини могат да бъдат от всякакво физическо естество.
По време на работа на автоматичната система входните и изходните стойности се променят с течение на времето. Динамиката на процеса на преобразуване на сигнала в тази връзка се описва с някакво уравнение, което свързва изходната променлива с входната променлива. Наборът от уравнения и характеристики на всички връзки описва динамиката на процесите на управление или регулиране в цялата система като цяло.
Основните характеристики на разделянето на автоматичните системи на големи класове според характера на вътрешните динамични процеси са следните:
- непрекъснатост или дискретност на динамичните процеси във времето;
- линейност или нелинейност на уравненията, описващи динамиката на процесите на управление.
В зависимост от естеството на промяната на управляващите сигнали, автоматичните системи се разделят на три класа:
- непрекъснати (аналогови) системи, които се описват с обикновени диференциални уравнения и в процеса на регулиране структурата на всички връзки в системата остава непроменена. Сигналите на изхода на отделните връзки на такава система са непрекъснати функции на влияния и време. Съществува непрекъсната функционална връзка между връзките на входа и изхода на автоматичната система. В този случай законът за промяна на изходната стойност във времето може да бъде произволен, в зависимост от формата на промяна на входната стойност и от формата на уравнението на динамиката на връзката. За да бъде автоматичната система като цяло непрекъсната, е необходимо преди всичко статичните характеристики на всички връзки да бъдат непрекъснати;
- дискретни (цифрови) системи, които се описват с диференциално-разностни уравнения и в тях на дискретни интервали от време веригата на управляващото въздействие се отваря или затваря. В дискретните системи отварянето на веригата за действие се извършва принудително и периодично чрез специални прекъсващи устройства. Такива системи съдържат импулсни елементи и извършват квантуване на сигнала както по ниво, така и по време. Връзка, която преобразува непрекъснат входен сигнал в поредица от импулси, се нарича импулсна връзка. Ако последващата връзка на автоматичната система също е дискретна, тогава за нея не само изходната, но и входната стойност ще бъде дискретна. Дискретните автоматични системи включват автоматични системи за импулсно управление, както и автоматични системи за управление на компютри. Последните дават резултата от изчислението на изхода дискретно, през определени интервали, под формата на числа за отделни дискретни числови стойности на изходното количество;
- релейни (дискретно-непрекъснати) системи, които се описват с двата вида уравнения. В тези системи отварянето или затварянето на веригата на действие се извършва от една от връзките на системата с непрекъсната стойност на входното действие. Отварянето или затварянето се извършва с помощта на реле или връзка с релейна характеристика. Релето се задейства при определени стойности на въздействие върху неговия чувствителен орган. Релейните системи извършват квантуване на сигнали във времето. Статичната характеристика на релейната връзка има точки на прекъсване.
Всеки от тези три класа автоматични системи е разделен на подкласове:
- стационарни автоматични системи със групирани или разпределени параметри;
- нестационарни автоматични системи със групирани или разпределени параметри.
При изучаването, изчисляването и синтеза на автоматичните системи трябва да се има предвид, че теорията и различните приложни методи са най-пълно развити за обикновените линейни автоматични системи. Следователно, в интерес на простотата на изчислението, винаги е желателно проблемът да се сведе до такава форма, че да се използват максимално методите за изследване на обикновени линейни автоматични системи. Обикновено уравненията на динамиката на всички връзки на автоматичната система се опитват да бъдат намалени до обикновени линейни и само за някои връзки, където това е неприемливо или където специално е въведена специална линейна или нелинейна връзка, тези специални свойства се вземат предвид.
Това обаче изобщо не означава, че при проектирането на нови автоматични системи трябва да се стремим към обикновени линейни автоматични системи. Напротив, съвсем очевидно е, че обикновените линейни автоматични системи имат ограничени възможности. Въвеждането на специални линейни и нелинейни връзки може да даде автоматичната система най-добри качества. Особено богати възможности имат автоматичните системи със специално въведени нелинейности и дискретните автоматични системи, включително тези с управляващи компютри и микропроцесорни автоматични системи.
Според вида и броя на сигналите системите за автоматично управление се разделят на:
- едноконтурни системи, в които има една регулируема стойност;
- многоконтурни системи, в които има няколко главни или локални обратни връзки;
- системите за некохерентно регулиране са предназначени за регулиране на различни количества, не са свързани помежду си и могат да взаимодействат само чрез общ обект на регулиране.
а) в зависимите системи на некохерентно управление промяната в една от контролираните променливи влияе върху промяната в други. Следователно в такива системи регулаторните процеси не могат да се разглеждат изолирано един от друг;
б) в независими системи за некохерентно управление, промяната в една от контролираните стойности не зависи от промяната в другите;
- системите за свързано регулиране предполагат наличието на няколко регулатора, чиито регулирани стойности имат взаимни връзки помежду си, извършвани в допълнение към обекта на регулиране.
В зависимост от наличието или липсата на грешка в регулирането, ATS се разделят на:
-статичните системи са такива системи, които предполагат наличието на постоянна грешка в управлението (drop). характерна особеностработа статична системае, че равновесието на системата може да бъде постигнато, когато различни стойностирегулирано количество и всяка стойност на регулираното количество съответства на отделна стойност на регулиращия орган;
- астатичните системи са такива системи, при които при различни стойности на външно въздействие върху обекта няма отклонение на контролираната стойност от необходимата стойност. В такива системи равновесното състояние се осъществява при една единствена стойност на управляваната величина, равна на дадената, като регулиращият орган трябва да може да заема различни позиции с една и съща стойност на управляваната величина.
Принципи на автоматично управление
Принципът на действие на всяка система за автоматично управление е да открива отклонения на контролираните стойности, които характеризират работата на регулирания обект или потока на процеса от необходимия режим и в същото време да действа върху регулирания обект или процес по такъв начин, че да отстрани тези отклонения.
В процеса на управление винаги има физични величиникоито трябва да се променят по строго определен начин.
Системите за автоматично управление трябва, въз основа на измерването на регулираните стойности, да формират контролни въздействия върху регулирания обект. Промяната на поведението на регулирания обект може да се извърши съгласно принципите на отворени или затворени цикли.
В отворена автоматична системаконтролното действие се формира въз основа на стойността на посочената стойност. В такива системи няма връзка между входа и изхода. В резултат на това протичането на контролния процес в отворените системи не зависи от резултатите, тоест от това как системата изпълнява своите функции. В отворена автоматична система се извършва само директно действие: от оператора към регулирания обект, от входа към изхода. Най-простият пример- процесът на включване на електрическо осветление в помещението.
За да може регулираната стойност y(t) на регулирания обект да приеме необходимата стойност, към неговия вход се прилага входно действие x(t). На практика обаче контролираната стойност y(t) на обекта на регулиране се отклонява от изискваната стойност по редица причини. Една от тези причини е влиянието на различни видове външни смущаващи въздействия f(t) върху обекта на регулиране. Друга причина е влиянието на промяна на параметрите на регулирания обект или други елементи на системата, т.е. влиянието на параметричните смущения (коефициенти на усилване, времеконстанти и др.). Третата причина за отклонението на контролираната променлива се дължи на промяната в необходимата стойност на контролираната променлива (промяна в необходимата температура на пещта за закаляване, произволна промяна в ъгловите координати на целта). Ако изискваната стойност на регулираната променлива се промени, тогава за съответното изменение на действителната й стойност е необходимо да се промени управляващото въздействие h(t) на входа на регулирания обект. При промяна на управляващото действие на входа на управляващия обект, който има инерция, възниква преходен процес, при който контролираната стойност няма да съответства на необходимата стойност.
Отклонение на контролираната стойност от желаната стойност може да възникне не само в преходен, но и в постоянен динамичен режим, когато изискваната стойност се променя, например при постоянна скорост или постоянно ускорение. Отклонението на контролираната стойност под влияние на изброените причини може да достигне недопустимо големи стойности, при които се нарушава техническият процес, осигуряван от обекта. Следователно възниква проблемът с намаляването на отклоненията на изходните стойности на обектите от изискваните стойности. Тази задача е основна задача на управлението (регулирането).
Очевидно е, че необходимостта от контролно действие възниква в случаите, когато процесът в обекта на регулиране се отклонява от предписанията, дадени от действащия алгоритъм.
Алгоритъмът за управление в такива автоматични системи се определя от свойствата на отделните връзки или естеството на входните сигнали. Много автоматични системи работят на принципа на управление с отворена верига, които имат предварително зададен алгоритъм на действие. Например стартиране на двигател с вътрешно горене, включване на компресор на локомотив, подаване на пясък под колооси, процесът на зареждане на батерията и др. За нормалното функциониране на такива автоматични системи трябва да се спазват редица мерки.
В тази система контролното действие може да бъде генерирано от човек. Сравнявайки действителните и необходимите стойности на контролираната променлива, човек може да идентифицира отклонението между тях и в съответствие с големината и знака на това отклонение се определя величината на контролното действие.
Първо, пълно съответствие между зададените и действителните стойности на контролираната променлива може да се осъществи само ако характеристиките на отделните връзки на автоматичната система са стабилни и влиянието на външни смущения е изключено.
Второ, те трябва да бъдат внимателно настроени, т.е. всяка позиция на задвижващото устройство трябва стриктно да съответства на стойността на контролираната променлива. Въпреки това запазване на настройките при износване на частите или стареене на елементите, както и при промяна на температурата околен святпредставлява трудна задача. Следователно системите с отворена верига не могат да осигурят висока точност на управление. Те не измерват резултата, предизвикан от контролното действие, и не предприемат действия, които влияят на този резултат, така че да съответства на желания.
В затворени автоматични системи контролираната стойност се сравнява със зададената стойност и на базата на сигнала за грешка се формира управляващо действие. Прогресът на процеса на автоматично управление зависи от резултатите от това сравнение.
За да се приложи такъв алгоритъм за управление, в конструкцията на автоматичната система се въвежда връзка, която се нарича обратна връзка, тъй като предава сигнал от изхода на регулирания обект към входа на автоматичната система в посока, обратна на посоката на предаване на контролното действие към регулирания обект.
Най-лесният начин е да поставите човешки оператор, който ще играе ролята на обратна връзка, например в процеса на ръчно управление превозно средствобило то кола, трактор, локомотив, самолет или космически кораб. В този случай сравняване на показанията устройства за управление, измервайки действителната стойност на управляваната величина (скорост, мощност, тяга, височина на полета и др.), с нейната зададена стойност, човекът-оператор оказва допълнително въздействие върху контролирания обект с цел постигане на минимално отклонение на контролираната величина от зададената стойност.
|

От една страна, действията на човек-оператор са елементарно прости, а от друга страна, наблюдението на множество устройства е доста досадно и лесно може да се извърши от специално автоматично устройство, което сравнява зададената и действителната стойност на контролираната променлива и въз основа на нея формира контролно въздействие върху регулирания обект. Така се появиха първите автоматични регулатори, предназначени да заменят монотонния и неефективен труд на човек автоматично устройство. Такова устройство е автоматичен регулатор.
Обектът на регулиране и автоматичният регулатор образуват затворена система.
В затворените автоматични системи действията на човек-оператор се свеждат до първоначална настройка на даден режим и общо наблюдение на процесите в автоматичната система. Точността на регулиране в затворени автоматични системи, т.е. точността на поддържане на необходимата функционална връзка между входа и изхода, зависи главно от точността, с която се сравняват изискваната и действителната стойност на контролираната променлива.
Системите за автоматично управление със затворен контур се различават по принципа на регулиране:
- по отклонение;
- от възмущение;
- комбинирани.
Системи за автоматично управление на принципа на отклонение, са основните в практиката на автоматизация на различни производствени съоръжения. Характеризират се с наличието на обратна връзка, която подава част от изходния сигнал към входа на автоматичната система и образува затворен контур на управление. Същността на този принцип на управление е, че действителната стойност на контролираната променлива постоянно се сравнява с нейната стойност. чдадена стойност. Ако има разлика между тези стойности над предварително определен праг, системата разработва регулаторно действие, насочено към елиминиране на тази разлика или намаляването й до определена приемлива стойност.
|

Необходимата стойност на регулираната стойност на автоматичната система y(t) се определя от движещата сила x(t), идваща от задвижващото устройство. Отклонението на контролираната стойност y(t) от зададената стойност може да бъде причинено както от въздействието на различни видове смущаващи въздействия, така и от промяна в настройващото действие x(t). За да се намали или премахне това отклонение, е необходимо да се разработи подходящо управляващо действие h(t) и да се приложи към входа на обекта на управление. Управляващото действие при използване на принципа на управление на отклонението се генерира в резултат на преобразуване на отклонението Dx(t) на контролираната променлива от зададената стойност.
В автоматичните системи, работещи на принципа на отклонението, управляващото действие h(t) се получава в резултат на трансформацията на сигнала за отклонение, а не от самия фактор, причинил отклонението, например смущаващото действие f(t) (т.е. в резултат на трансформация на следствието, а не на самата причина), така че не може да има обратен ефект върху обекта без забавяне в сравнение с смущаващия ефект. Следователно принципът на контрол на отклонението не позволява напълно да се елиминира отклонението, т.е. да се постигне абсолютна инвариантност.
В автоматичните системи, работещи на принципа на отклонението, управляващото действие се получава в резултат на трансформация на отклонението, което може да бъде причинено от различни фактори. Следователно в тези системи отклонението намалява, независимо от кой от факторите е причинено. Тъй като в автоматичните системи, работещи на принципа на отклонението, отклоненията, възникващи при промяна на параметрите на елементите на автоматичната система, също намаляват, тогава затворените автоматични системи ще бъдат по-малко чувствителни към промените в параметрите на нейните елементи в сравнение с отворените автоматични системи , при които не се компенсират отклонения, причинени от промени в параметрите на елементите им.
Автоматичните системи, работещи по този принцип, имат висока точност на поддържане на контролираната стойност (поради наличието на постоянен контрол на разликата между зададените и действителните стойности), но ниска скорост.
Ниската производителност на такива системи се дължи на факта, че
1. Затвореният контур на автоматично управление, създаден от автоматичния контролер и обратната връзка, включва обекта на регулиране. На практика почти винаги обект на регулиране е най-инерционната връзка в автоматичната система;
2. Реагират не на причината, която предизвиква несъответствието между заданието и действителната стойност на управляваната величина, а на следствието - несъответствието между зададената и действителната стойност на регулираната величина.
За изграждане на автоматична система за управление, работеща на принципа на отклонението, при равни други условия е необходимо минимално количество първоначална информация за обекта на регулиране. Почти цялата информация за обекта на регулиране се предава чрез обратна връзка. Наличието на обратна връзка се характеризира с факта, че прилагането на някакво въздействие върху автоматичната система води до противодействие, което възстановява състоянието на цялата автоматична система.
В най-простия случай автоматичният контролер сравнява изходния сигнал на автоматичната система с еталонния сигнал, за да разбере колко правилно автоматичната система изпълнява задачата си. Наличието на обратна връзка в автоматичната система променя нейните статични и динамични характеристики. Благодарение на обратната връзка, автоматичната система може да бъде по-точна и по-бърза, или обратното, по-бавна. Може да направи автоматичната система стабилна или нестабилна.
Системите, работещи на принципа на отклонението, имат следните предимства:
1) намаляване на отклонението на контролираната променлива от необходимата стойност, независимо от това какви фактори (външни смущаващи влияния, промени в параметрите на елементите на системата, промени в действието на настройката) са го причинили;
2) са по-малко чувствителни към промените в параметрите на системните елементи в сравнение с отворените системи.
Системите, работещи на принципа на отклонението, имат следните недостатъци:
1) в прости едноконтурни системи с принципа на управление чрез отклонение не може да се постигне абсолютна инвариантност;
2) в системи с принципа на регулиране по отклонение, както в затворените системи, възниква проблемът за устойчивостта.
Поради значителните предимства на системата с принципа на регулиране по отклонение, те намират широко приложение в техниката.
Системи за автоматично управление, работещи на принципа на компенсация на смущенията, са предназначени да намалят влиянието на смущаващите въздействия върху обекта на регулация чрез измерване на тези влияния и компенсиране на влиянието им поради обратното изкуствено въздействие върху обекта на регулация.
При разработването на този принцип инженерите изхождат от предположението, че за да се намали или премахне отклонението на контролираната стойност от зададената стойност, причинено от влиянието на един или друг фактор, е необходимо управляващото действие да бъде определена функция на този фактор и характеристиките на обекта на регулация.
При регулиране на принципа на компенсация на смущението проблемът е да се компенсира влиянието на смущението върху контролираната стойност.
Работната информация в тези системи има смущаващи влияния, лошо влияниекоито подлежат на компенсация. Следователно в тези системи е възможно напълно да се компенсира влиянието на смущаващото действие върху контролираната променлива, т.е. възможно е да се постигне инвариантност (независимост) на контролираното количество по отношение на това смущаващо действие. Разглежданият метод може да компенсира влиянието на всяко от смущаващите въздействия поотделно. На практика обаче обикновено не е възможно да се компенсира влиянието на всички смущаващи влияния, тъй като значителна част от влиянията не могат да бъдат измерени и при опит за компенсиране на всички възможни смущаващи влияния се получава изключително сложна система.
Такива автоматични системи изискват първоначална информация дори по-пълна от автоматичните системи, работещи на принципа на отклонението. Наистина, за да се компенсира влиянието на всяко смущение в стационарно състояние и още повече в преходни условия, е необходимо да се знае точно това влияние.
В този случай се избират едно (основно) или две (не повече) смущения и се определя как те влияят върху управляваната величина. Контролното действие, прилагано към обекта на регулиране от изпълнителния орган, зависи от смущението, така че промените в контролираната стойност да не надхвърлят определените граници. Такива системи са прости и стабилни в експлоатация, но не са в състояние да реагират на други смущения, които причиняват отклонение на контролираната променлива.
|

Принципът на компенсацията на смущението е, че за да се намали или елиминира отклонението Dx(t) на контролираната променлива от зададената стойност, причинено от смущаващото действие f(t), този ефект се измерва и в резултат на неговата трансформация се измерва генерира се управляващото въздействие h(t), което при подаване на входа на регулирания обект предизвиква компенсиращо отклонение на контролираната стойност y(t) с обратен знак спрямо отклонението, предизвикано от смущаващото влияние f(t ). Смущението f(t) се измерва с помощта на компенсатор на смущението. Някои автоматични системи изрично включват изпълнителни механизми и органи за управление.
Сигналът за смущението хв(t) в суматора се събира (изважда) със задаващо действие, което определя необходимата стойност на управляваната величина. Общият ефект Dx(t) с помощта на автоматичен контролер (за този принцип на управление в повечето случаи автоматичният контролер е усилвател на мощност) се усилва до стойността, необходима за получаване на необходимия режим на работа на регулирания обект . Така образуваното управляващо въздействие h(t) постъпва на входа на обекта на управление и компенсира влиянието на смущаващото въздействие.
Автоматична система, работеща на принципа на компенсиране на смущенията, е автоматична система с отворен цикъл. При него процесът на регулиране не зависи от резултатите от работата на автоматичната система (контролираната величина не се измерва и не се предприемат действия, ако тя не съответства на необходимата стойност) и се наблюдава само пряк ефект.
Автоматичната система, работеща на този принцип, има висока скорост, но ниска точност при поддържане на контролираната стойност. Високата скорост се осигурява от факта, че автоматичният регулатор реагира не на ефекта от влиянието на смущаващото влияние (отклонение на управляваната величина), а на причината - промяната на смущаващото действие, като предварително подготвя обекта на управление за възможно отклонение на контролираната променлива.
Автоматичните системи, работещи на принципа на компенсация на смущенията, имат следните предимства:
1) ви позволяват напълно да компенсирате основните смущаващи влияния, т.е. в тези системи е възможно да се постигне инвариантност на контролираната променлива по отношение на смущаващите влияния;
2) в тях, както във всички отворени системи, няма проблем със стабилността.
Автоматичните системи, работещи на принципа на компенсация на смущенията, имат следните недостатъци:
1) елиминират влиянието само на основните смущаващи влияния, за които се създават компенсационни канали;
2) има отклонение на контролираната стойност от изискваната стойност в резултат на промяна на вторичните смущаващи влияния, за които няма компенсационни канали;
3) в тези системи, както и в отворените системи, се появяват отклонения от контролираната стойност с промяна в характеристиките на обекта и елементите на автоматичната система;
4) прилагането на принципа за контрол на смущенията е ограничено до обекти, чиито характеристики са известни или могат да бъдат определени.
Системите, работещи на принципа на компенсиране на смущенията, имат специфични приложения.
Системи за автоматично управление, работещи на комбиниран принцип, комбинират принципа на компенсация на смущенията и принципа на отклонение. Такива автоматични системи съчетават положителните аспекти на разгледаните по-рано принципи на автоматично управление и премахват техните недостатъци.
|
В такива системи, в допълнение към главния затворен контур за регулиране на отклонението, комбинираната автоматична система съдържа компенсационен контур за едно или повече смущения. Обемът на работна информация в комбинираната автоматична система е по-висок, отколкото в предишните системи. Тук информацията за смущаващото влияние се добавя към оперативната информация за отклонението на контролираната променлива.
В комбинираните автоматични системи принципът на регулиране по отклонение се осъществява с помощта на основната обратна връзка, а принципът на управление по смущение с помощта на компенсационни връзки. Ако най-значимата грешка е причинена от смущаващото действие f(t), тогава се въвежда връзка за това смущение, но ако такава грешка се получава поради промяна в настройващото действие x(t), тогава връзката за действието на настройката се определя от алгоритъма за автоматично управление.
В комбинираните автоматични системи компенсационната връзка за основното смущение (задвижващо действие) елиминира компонента на грешката, причинена от това смущение (промяна на задвижващото влияние), и в резултат на действието на обратната връзка, грешките, причинени от вторични смущаващи влияния, за които няма компенсационни връзки, се намаляват. Ако с помощта на компенсаторни връзки грешките, причинени от основните смущаващи (настройващи) влияния, не се елиминират напълно, тогава остатъчните грешки също се намаляват с помощта на обратна връзка.
За формиране на управляващо действие в комбинирани автоматични системи се използва както пряка информация за основните смущаващи въздействия (промяна в управляващото действие), така и отклонението на управляваната величина от изискваната стойност, причинено от всички смущаващи влияния (промяна в управляващото действие). . По този начин:
1) в комбинирани автоматични системи, с помощта на компенсаторни връзки, е възможно да се постигне пълна компенсация на грешки, причинени от основните смущаващи и водещи влияния (възможно е да се постигне инвариантност);
2) заедно с възможността за пълно компенсиране на грешките, причинени от основните влияния, в комбинирани автоматични системи, с помощта на обратна връзка, грешките, причинени от вторични смущаващи влияния, за които няма компенсационни връзки, както и недокомпенсирани грешки от основните влияния са намалени;
3) ако условията за компенсиране на смущаващото действие са нарушени, получената грешка се намалява от затворена автоматична система, т.е. комбинираните автоматични системи са по-малко чувствителни към промените в параметрите на отворените канали, отколкото отворените автоматични системи;
4) поради наличието на отворени компенсационни канали в комбинирани автоматични системи, проблемът със стабилността не е толкова остър, колкото в затворените автоматични системи.
Естествено, точността на регулиране, постижима в комбинираните системи, е по-висока от точността на всички други автоматични системи. На практика подобни автоматични системи са сложни и скъпи.
По този начин комбинираните автоматични системи са най-модерните системи с висока точност при поддържане на контролираната стойност. На разглежданите принципи се изграждат не само технически системи за автоматично управление, но и системи за управление в обществото и регулаторни системи в живите организми. Следователно методите на изследване технически системиавтоматичното регулиране до известна степен може да се използва за изследване на системите за контрол в обществото и дивата природа.
Въведение 5
Разработване на функционална схема на система за автоматично управление (ACS) 6
Разработване на диференциални уравнения и предавателни функции на елементи на системата. 7
развитие блокова схема SAR 11
Преобразуване на структурната схема на ACS в канонична форма 12
Анализ на устойчивостта на СКУД по алгебрични критерии 13
Изчисляване и изграждане на преходни процеси по каналите на регулиращи и смущаващи въздействия. петнадесет
Преходна оценка на качеството 17
Графично приложение 19
Препратки 22
Въведение
При функционалното проектиране на системите за автоматично управление най-често се използват методите на теорията на автоматичното управление. Автоматичната система се състои от редица технически устройства с определени функционални и динамични свойства. За тяхното описание и изследване автоматичната система е представена от определен набор от елементи, надарени със съответните свойства.
Реалните технически обекти се описват с нелинейни диференциални и алгебрични уравнения. Но тъй като в началния етап на проектиране се решават задачите за предварителна оценка на техническите решения и прогнозиране, сравнително прости математически модели могат да бъдат разумно използвани за тези цели. В тази връзка нелинейните уравнения на математическия модел се подлагат на линеаризация.
Описанието на автоматичните системи е значително опростено чрез използване на методите на оперативното смятане. Използвайки трансформацията на Лаплас, линейното диференциално уравнение се свежда до алгебрично уравнениес комплексни променливи.
Разработване на функционална схема на система за автоматично управление (sar)
ACS може да бъде представена от две основни части - обект на регулиране и регулиращо устройство - регулатор.
Състоянието на обекта се определя от редица стойности, характеризиращи:
Въздействие върху обекта на регулиращи устройства;
Въздействие върху обекта на външната среда;
Потокът от процеси в самия обект.
Най-общо обектът на регулиране може да бъде представен чрез следната схема:
Ориз. 1. Схема на обекта на регулация
Където Z е съвкупността от контролирани външни въздействия;
F - неконтролирани външни въздействия;
X – регулаторни влияния;
U - регулируеми стойности.
В нашия случай обектът (DC генератор) има един регулируем ефект (принудителен ток i c) и една регулируема стойност (напрежение на клещи U n) и се нарича прост или едносвързан.
Поведението на регулирания обект може да се разглежда в режимите на статика и динамика. Функционалната диаграма е диаграма, в която всеки функционален елемент на системата съответства на определена връзка. Принципната схема на разработената ATS е показана в графичното приложение.
За тази ACS функционалната диаграма изглежда така:
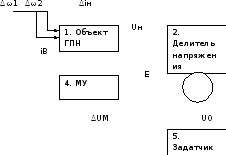
Фигура 2. Функционална схема на ATS
Където 1 - обект на регулиране - генератор на постоянно напрежение;
2 – делител на напрежението;
3 - устройство за сравнение, е стимулиращ възел;
4 - усилвател (в нашия случай магнитен усилвател със самонамагнитване);
5 - сетер - устройство за настройка на инсталацията.
Натоварващият ток на магнитния усилвател е управляваща променлива, така че на функционалната диаграма няма задвижващ механизъм.
Принцип на работа:
Регулираната стойност е напрежението U n на клемите на генератора, което се сравнява с еталонното напрежение U 0 през разделителя K (U 1) несъответствието E се подава към управляващата намотка на магнитния усилвател. Натоварването на магнитния усилвател е токът във възбудителната намотка на възбудителя на спомагателния генератор.
Настройката се дава от регулируемото съотношение на делителя на напрежението R 1 , което установява съответствието между регулираното напрежение U n и еталонното напрежение U 0 .
Смущаващи, неконтролирани влияния са: спад на напрежението в намотките на генератора, причинен от тока на натоварване i n; смущения, причинени от тока на натоварване i n; смущения, причинени от промяна в скоростта на въртене на валовете на генератора ω 1 и ω 2 ; флуктуация на захранващото напрежение на магнитния усилвател ∆U n.
В съответствие със задачата на нашата функционална диаграма, входните и изходните стойности са посочени за всеки функционален блок. Показани са и действията на смущаващи влияния.
Според принципа на регулиране автоматични системи за управлениеса разделени на четири класа.
1. Система за автоматична стабилизация - система, при която регулаторът поддържа постоянна зададена стойност на контролирания параметър.
2. Програмна система за управление - система, която осигурява промяна на контролирания параметър по предварително зададен закон (във времето).
3. Проследяваща система - система, която осигурява промяна на контролирания параметър в зависимост от друга стойност.
4. Система за екстремно управление - система, при която регулаторът поддържа стойността на управляваната величина, която е оптимална за променящите се условия.
За регулиране температурен режимелектрически отоплителни инсталации, като се използват предимно системи от първите два класа.
Автоматичните системи за контрол на температурата могат да бъдат разделени на две групи според вида на действие: периодично и непрекъснато регулиране.
Автоматични регулатори за функционални характеристикисе разделят на пет вида: позиционни (релейни), пропорционални (статични), интегрални (астатични), изодромни (пропорционално-интегрални), изодромни с изпреварване и с първа производна.
Позиционните регулатори се наричат периодични ACS, а други видове регулатори се наричат непрекъснати ACS. По-долу са основните характеристики на позиционните, пропорционалните, интегралните и изодромните регулатори, които се използват най-често в системите за автоматичен контрол на температурата.
(Фиг. 1) се състои от контролен обект 1, температурен сензор 2, програмиращо устройство или регулатор на температурно ниво 4, контролер 5 и задвижващ механизъм 8. В много случаи първичен усилвател 3 се поставя между сензора и устройство за програмиране и между контролера и изпълнително устройство- вторичен усилвател 6. Допълнителен сензор 7 се използва в изодромни системи за управление.
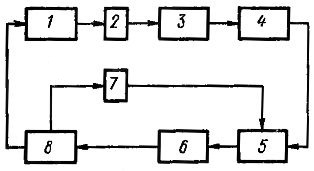
Ориз. 1. Функционална схема на автоматичен контрол на температурата
Позиционни (релейни) терморегулатори
Позиционните регулатори са тези, при които регулаторният орган може да заема две или три определени позиции. В електрическите отоплителни инсталации се използват дву- и трипозиционни регулатори. Те са прости и надеждни в експлоатация.
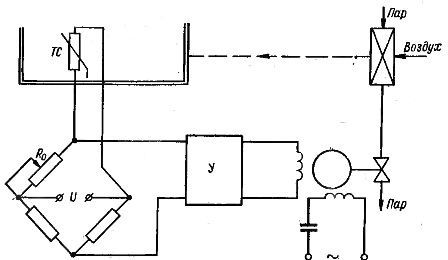
На фиг. 2 показано електрическа схемадвупозиционно регулиране на температурата на въздуха.
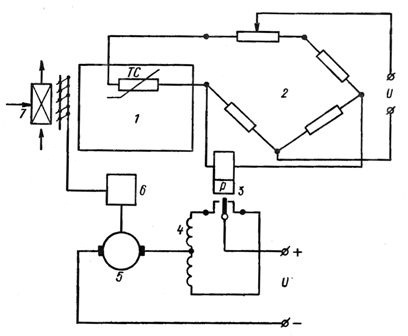
Ориз. 2. Принципна схема на управление на температурата на въздуха: 1 - контролен обект, 2 - измервателен мост, 3 - поляризирано реле, 4 - намотки за възбуждане на двигателя, 5 - котва на двигателя, 6 - редуктор, 7 - калоричност.
За контрол на температурата в регулирания обект се използва топлинното съпротивление TS, което е включено в едно от рамената на измервателния мост 2. Стойностите на съпротивлението на моста се избират така, че при дадена температура мостът е балансиран, тоест напрежението в диагонала на моста е нула. Когато температурата се повиши, поляризираното реле 3, включено в диагонала на измервателния мост, включва една от намотките 4 на електродвигателя постоянен ток, който с помощта на редуктор 6 се затваря въздушна клапапред нагревателя 7. Когато температурата падне, въздушната клапа се отваря напълно.
При двупозиционно регулиране на температурата количеството на подадената топлина може да се настрои само на две нива - максимално и минимално. Максималното количество топлина трябва да е повече от необходимото за поддържане на желаната контролирана температура, а минималното трябва да е по-малко. В този случай температурата на въздуха се колебае около зададената стойност, т.нар автоколебателен режим(фиг. 3, а).
Линиите, съответстващи на температурите τ n и τ in определят долната и горната граница на мъртвата зона. Когато температурата на регулирания обект, намалявайки, достигне стойността τ n, количеството подадена топлина моментално се увеличава и температурата на обекта започва да се повишава. След като достигне стойността τ в, регулаторът намалява подаването на топлина и температурата пада.
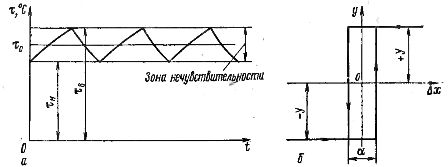
Ориз. 3. Времева реакция на управлението за включване и изключване (a) и статична реакция на регулатора за включване и изключване (b).
Скоростта на повишаване и понижаване на температурата зависи от свойствата на регулирания обект и от неговата времева характеристика (крива на ускорение). Температурните колебания не надхвърлят мъртвата зона, ако промените в подаването на топлина незабавно причиняват температурни промени, т.е. забавяне на контролирания обект.
С намаляване на мъртвата зона амплитудата на температурните колебания намалява до нула при τ n = τ c. Това обаче изисква подаването на топлина да се променя с безкрайно висока честота, което е изключително трудно за прилагане на практика. Във всички реални обекти на регулация има закъснение. Процесът на регулиране в тях протича приблизително по следния начин.
Когато температурата на регулирания обект спадне до стойността τ n, подаването на топлина незабавно се променя, но поради закъснението температурата продължава да намалява за известно време. След това се повишава до стойността τ, при която подаването на топлина моментално намалява. Температурата продължава да се покачва известно време, след което, поради намаленото подаване на топлина, температурата пада и процесът се повтаря отново.
На фиг. 3, b е показано статична характеристика на контролера за включване/изключване. От това следва, че регулаторното въздействие върху обекта може да приема само две стойности: максимална и минимална. В разглеждания пример максимумът съответства на позицията, при която въздушният клапан (виж фиг. 2) е напълно отворен, минимумът - когато клапанът е затворен.
Знакът на управляващото въздействие се определя от знака на отклонението на регулираната стойност (температура) от зададената й стойност. Големината на управляващото въздействие е постоянна. Всички двупозиционни контролери имат хистерезисна зона α, която възниква поради разликата в работния и освобождаващия ток на електромагнитното реле.
Пример за използване на контрол на температурата за включване/изключване:
Пропорционални (статични) терморегулатори
В случаите, когато се изисква висока точност на управление или когато процесът на самоколебане е неприемлив, приложете контролери с непрекъснат процес на управление. Те включват пропорционални регулатори (P-регулатори)подходящ за управление на голямо разнообразие от технологични процеси.
В случаите, когато се изисква висока точност на управление или когато е неприемлив самоколебателен процес, се използват регулатори с непрекъснат процес на управление. Те включват пропорционални регулатори (П-регулатори), подходящи за регулиране на голямо разнообразие от технологични процеси.
В системите за автоматично управление с P-регулатори позицията на регулаторния орган (y) е право пропорционална на стойността на контролирания параметър (x):
y=k1х,
където k1 е коефициентът на пропорционалност (усилване на регулатора).
Тази пропорционалност се осъществява, докато регулиращият орган достигне своите крайни положения (крайни изключватели).
Скоростта на движение на регулиращия орган е правопропорционална на скоростта на изменение на контролирания параметър.
На фиг. 4 е показана принципна диаграма на система за автоматично регулиране на стайната температура с помощта на пропорционален регулатор. Стайната температура се измерва от съпротивителен термометър TC, включен в измервателната мостова верига 1.

Ориз. 4. Схема за пропорционално управление на температурата на въздуха: 1 - измервателен мост, 2 - контролен обект, 3 - топлообменник, 4 - кондензаторен двигател, 5 - фазочувствителен усилвател.
При дадена температура мостът е балансиран. При отклонение на контролираната температура от зададената стойност в диагонала на моста се появява напрежение на дисбаланс, чиято големина и знак зависят от големината и знака на температурното отклонение. Това напрежение се усилва от фазово-чувствителен усилвател 5, на изхода на който намотката на двуфазен кондензаторен двигател 4 задвижки.
Задвижващият механизъм премества управляващия елемент, променяйки потока на охлаждащата течност в топлообменника 3. Едновременно с движението на управляващия елемент се променя съпротивлението на едно от рамената на измервателния мост, в резултат на което температурата се променя, при който мостът е балансиран.
По този начин, поради твърда обратна връзка, всяка позиция на регулаторния орган съответства на собствената си равновесна стойност на контролираната температура.
Пропорционалният (статичен) регулатор се характеризира с остатъчна неравномерна регулация.
В случай на рязко отклонение на товара от зададената стойност (в момента t1), контролираният параметър ще достигне след определен период от време (момента t2) до нова устойчива стойност (фиг. 4). Това обаче е възможно само при нова позиция на регулиращия орган, тоест при нова стойност на контролирания параметър, която се различава от зададената стойност с δ.

Ориз. 5. Времеви характеристики на пропорционалното управление
Недостатъкът на пропорционалните регулатори е, че всяка стойност на параметъра отговаря само на една конкретна позиция на регулаторния орган. За поддържане на зададената стойност на параметъра (температура) при промяна на товара (консумацията на топлина) е необходимо регулиращият орган да заеме различна позиция, съответстваща на новата стойност на товара. Това не се случва в пропорционален регулатор, което води до остатъчно отклонение на управляваната променлива.
Интегрални (астатични регулатори)
Интеграл (астатичен)наричат се такива регулатори, при които, когато параметърът се отклони от зададената стойност, регулиращият орган се движи повече или по-малко бавно и през цялото време в една посока (в рамките на работния ход), докато параметърът отново приеме зададената стойност. Посоката на хода на регулиращия орган се променя само когато параметърът премине през зададената стойност.
В интегралните регулатори на електрическо действие обикновено изкуствено се създава мъртва зона, в рамките на която промяната на параметъра не предизвиква движение на регулаторния орган.
Скоростта на движение на регулиращия орган в интегралния регулатор може да бъде постоянна и променлива. Характеристика на интегралния контролер е липсата на пропорционална връзка между установените стойности на контролирания параметър и позицията на регулаторния орган.
На фиг. 6 показва схематична диаграма на автоматична система за контрол на температурата, използваща интегриран контролер. В него, за разлика от схемата за пропорционално регулиране на температурата (виж фиг. 4), няма твърда обратна връзка.
Ориз. 6. Схема интегрална регулациятемпература на въздуха
При интегралния регулатор скоростта на регулиращия орган е правопропорционална на отклонението на контролирания параметър.
Процесът на интегрално регулиране на температурата с рязка промяна на натоварването (консумация на топлина) е показан на фиг. 7 с помощта на времеви характеристики. Както може да се види от графиката, управляваната променлива с интегрално управление бавно се връща към зададената стойност.

Ориз. 7. Времеви характеристики на интегралното регулиране
Изодромни (пропорционално-интегрални) регулатори
Изодромна регулацияима свойства както на пропорционално, така и на интегрално регулиране. Скоростта на движение на регулиращия орган зависи от големината и скоростта на отклонение на контролирания параметър.
Ако контролираният параметър се отклонява от зададената стойност, регулирането се извършва по следния начин. Първоначално регулиращият орган се движи в зависимост от големината на отклонението на контролирания параметър, тоест се извършва пропорционално регулиране. След това регулиращият орган извършва допълнително движение, което е необходимо за отстраняване на остатъчната неравномерност (интегрална регулация).
Изодромна система за контрол на температурата на въздуха (фиг. 8) може да се получи чрез замяна на твърдата обратна връзка в пропорционалната управляваща верига (вижте фиг. 5) с еластична обратна връзка (от регулатора към плъзгача на съпротивлението на обратната връзка). Електрическата обратна връзка в изодромната система се осъществява от потенциометър и се въвежда в системата за управление чрез верига, съдържаща съпротивление R и капацитет C.
При преходни процеси сигналът за обратна връзка, заедно със сигнала за отклонение на параметъра, въздейства върху следващите елементи на системата (усилвател, електродвигател). Когато регулиращият орган е неподвижен, в каквото и положение да се намира, при зареждане на кондензатор С обратният сигнал затихва (в стационарно състояние е равен на нула).
Ориз. 8. Схема за изодромно регулиране на температурата на въздуха
За изодромната регулация е характерно, че неравномерността на регулацията (относителната грешка) намалява с увеличаване на времето, приближавайки се до нулата. В този случай обратната връзка няма да причини остатъчни отклонения на контролираната променлива.
По този начин изодромният контрол води до много по-добри резултати от пропорционалния или интегралния контрол (да не говорим за позиционния контрол). Пропорционалното управление поради наличието на твърда обратна връзка възниква почти мигновено, изодромно - бавно.
Софтуерни системи за автоматичен контрол на температурата
За осъществяване на програмно управление е необходимо непрекъснато да се влияе върху настройката (зададената точка) на контролера, така че контролираната стойност да се променя според предварително определен закон. За тази цел модулът за настройка на контролера е снабден със софтуерен елемент. Това устройство служи за установяване на закона за промяна на дадената стойност.
По време на електрическо отопление, задвижващият механизъм ACS може да действа, за да включва или изключва секции от електрическите нагревателни елементи, като по този начин променя температурата на отопляемата инсталация в съответствие с дадена програма. Софтуерното управление на температурата и влажността на въздуха се използва широко в инсталациите за изкуствен климат.
Съвременната теория на автоматичното управление е основната част от теорията на управлението. Автоматичната система за управление се състои от регулируем обект и контроли, които действат върху обекта, когато една или повече регулируеми променливи се променят. Под влияние на входните сигнали (управляващи или смущаващи) управляваните величини се променят. Целта на регулирането е да се формират такива закони, при които изходните регулирани променливи ще се различават малко от изискваните стойности. Решаването на този проблем в много случаи се усложнява от наличието на случайни смущения (шум). В този случай е необходимо да се избере такъв закон за управление, при който управляващите сигнали да преминават през системата с малки изкривявания, а шумовите сигнали практически да не се предават.
Теорията на автоматичното управление измина дълъг път в своето развитие. В началния етап бяха създадени методи за анализ на устойчивостта, качеството и точността на регулиране на непрекъснати линейни системи. Тогава методите за анализ на дискретни и дискретни непрекъснати системи. Може да се отбележи, че методите за изчисляване на непрекъснати системи се основават на честотни методи, а методите за изчисляване на дискретни и дискретно-непрекъснати системи се основават на методи на z-преобразуване.
В момента се разработват методи за анализ на нелинейни системи за автоматично управление. Нарушаването на принципа на суперпозиция в нелинейните системи, наличието на редица редуващи се (в зависимост от въздействието) режими на устойчиви, нестабилни движения и автоколебания усложняват техния анализ. Проектантът среща още по-големи трудности при изчисляването на екстремни и самонастройващи се системи за управление.
Както теорията на автоматичното управление, така и теорията на управлението са включени в науката под общото наименование "техническа кибернетика", която сега е получила значително развитие. Техническата кибернетика изучава общите закономерности на сложни системи за динамично управление на технологични и производствени процеси. техническа кибернетика, автоматично управлениеи автоматичното управление се развиват в две основни посоки: първата е свързана с постоянен прогрес и усъвършенстване на дизайна на елементите и технологията на тяхното производство; вторият - с най-рационалното използване на тези елементи или техните групи, което е задачата за проектиране на системи.
Проектирането на системи за автоматично управление може да се извърши по два начина: чрез метода на анализ, когато с предварително избрана структура на системата (чрез изчисление или моделиране) се определят нейните параметри;
по метода на синтеза, когато според изискванията веднага се избира най-добрата структура и параметри за системата. И двата метода са широко разпространени практическа употребаи следователно са изцяло обхванати в тази книга.
Определянето на параметрите на една система, когато са известни нейната структура и изискванията към цялата система като цяло, се отнася до проблема за синтеза. Решението на този проблем с линеен контролен обект може да се намери, като се използват например честотни методи, методът на кореновото място или чрез изследване на траекториите на корените на характеристичното уравнение на затворена система. Избор на коригиращо средство чрез синтез в класната стая дробни рационални функциисложна променлива може да се извърши с помощта на графично-аналитични методи. Същите методи позволяват да се синтезират коригиращи устройства, които потискат самоосцилиращи и нестабилни периодични режими в нелинейни системи.
Методите за синтез бяха доразвити въз основа на принципите на максималното и динамичното програмиране, когато се определя оптималният закон за управление от гледна точка на даден критерий за качество, който осигурява горната граница на качеството на системата, която трябва да бъде към който се стремят при проектирането му. Решаването на този проблем обаче практически не винаги е възможно поради сложността на математическото описание на физическите процеси в системата, невъзможността за решаване на самата оптимизационна задача и трудностите при техническата реализация на открития нелинеен закон за управление. Трябва да се отбележи, че прилагането на сложни закони за управление е възможно само когато в системния контур е включен цифров компютър. Създаването на екстремни и самонастройващи се системи също е свързано с използването на аналогови или цифрови компютри.
Формирането на системи за автоматично управление, като правило, се извършва на базата на аналитични методи за анализ или синтез. На този етап от проектирането на системите за управление, въз основа на приетите допускания, се съставя математически модел на системата и се избира нейната предварителна структура. В зависимост от вида на модела (линеен или нелинеен) се избира изчислителен метод за определяне на параметрите, които осигуряват зададените показатели за стабилност, точност и качество. След това математическият модел се прецизира и с помощта на средствата математическо моделиранеопределяне на динамични процесив системата. Под действието на различни входни сигнали се вземат честотните характеристики и се сравняват с изчислените. След това окончателно се установяват границите на стабилност на системата във фаза и модул и се намират основните показатели за качество.
Освен това, задаване на типични контролни действия върху модела; премахване на характеристиките на точността. На базата на математическо моделиране се изготвят техническите изисквания към оборудването на системата. От произведеното оборудване се сглобява контролер и се прехвърля към полуестествено моделиране, при което обектът на управление се събира под формата на математически модел.
Въз основа на характеристиките, получени в резултат на HIL моделирането, се взема решение за пригодността на контролера да работи с реален обект на регулиране. Окончателният избор на параметрите на контролера и настройката му се извършват в естествени условия по време на експерименталната разработка на системата за управление.
Развитието на теорията за автоматично управление, базирано на уравненията на състоянието и z-преобразуванията, максималния принцип и метода на динамично програмиране, подобрява метода за проектиране на системи за управление и ви позволява да създавате високоефективни автоматични системи за най-много различни индустрииНационална икономика.
Получените по този начин автоматични системи за управление осигуряват високо качество на продуктите, намаляват тяхната себестойност и повишават производителността на труда.
Съветваме ви да прочетете
, диагноза, лечение Лечение на урогенитална хламидия") Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение Лечение на урогенитална хламидия
Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение Лечение на урогенитална хламидия Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво
Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво Да чакаш или да не чакаш човек от армията. По каква причина могат да бъдат назначени от армията
Да чакаш или да не чакаш човек от армията. По каква причина могат да бъдат назначени от армията Печени ябълки с извара Печени ябълки с извара
Печени ябълки с извара Печени ябълки с извара

