1.1.Основни понятия и видове
АВТОМАТИЧНО РЕГУЛИРАНЕ
Автоматичното управление е набор от действия, насочени към осъществяване на функционирането на обекта за управление в съответствие с програмата и целта на управлението.
Под контролен обект се разбира устройство, в което се поддържа стойността на необходимите показатели на даден процес. Фактическото състояние на обекта на управление се определя от един или повече работни параметри г аз , наречени регулируеми стойности или регулируеми координати и определящи действията на системата за управление (фиг. 1.1).
Знаете ли методите, принципите и основите на автоматизацията? Актуализирайте процеса, в който човешката дейност ще бъде заменена от дейността на различни устройства и устройства! Ще ви запознаем с различните видове управление и как работи автоматизираното управление.
В миналото всичко се управляваше на ръка. Това обаче се промени с началото на автоматизацията. Днес разграничаваме различни видовеуправление. Контролът е действие върху даден обект за постигане на дадена цел. Въпреки това, всеки винаги се е опитвал да се отърве от скучните физически и умствени дейности, които постепенно започнаха да превземат автоматите. Когато автоматичното управление беше заменено с ръчно, можехме да започнем да говорим за началото на автоматизацията. Автоматичното управление разделяме на пряко и косвено.
ATв реални условия обектът на управление се влияе от външни въздействия, които се наричат смущения f аз. По същество всяка физическа величина, която характеризира контролирания обект, например скорост (линейна и ротационна), напрежение и ток, линейни и ъглови премествания и т.н., могат да се използват като регулирани величини.
Три вида контрол и определение за регулиране
В първия от тях процесът на управление протича без източник на захранване. Понастоящем обаче обикновено се използва вторият тип управление на мощността, който е разгледан в текста по-долу. Можем да споделим управлението на автоматизацията със захранването в зависимост от това дали неговият изход се поддържа.
Контрол Контрол висши формиконтрол. . Контролът е метод на контрол, който не може да бъде контролиран по никакъв начин. Регулирането в автоматизацията се състои в поддържане физическо количествона постоянна стойност или на стойност, която се променя според правило. Стойностите на количеството се сравняват постоянно с необходимата стойност по време на контрола. Евентуалните отклонения се отстраняват чрез намеси в процеса на регулиране. Следващата фигура ясно илюстрира разликата между управление и регулиране.
Регулируеми стойности г азопределени от контролни действия U аз (T) на входа на контролния обект. Тези ефекти причиняват промени във вътрешното състояние на ОС и в резултат на това в контролираните работни параметри.
Обикновено автоматичното управление се извършва с помощта на устройства за автоматично управление без човешка намеса. Комбинацията от устройството за автоматично управление и обекта за управление, взаимодействащи помежду си, образува система за автоматично управление (ACS).
Висши форми на управление и изкуствен интелект
Диаграмата показва как работи автоматизацията. Източник: Иван Шварц, Основи на автоматизацията. По-високите форми на контрол включват оптимален контрол, адаптивен контрол, обучение и изкуствен интелект. Оптималното управление е възможно най-ефективно или, обратно, много бързо. Системата е в състояние да постигне желаните свойства с минимална консумация на енергия, като винаги търси най-благоприятните ефекти и по този начин осигурява най-доброто поведение на системата при дадени условия.
Основните видове автоматично управление са:
1) автоматично управление с отворена верига от влияния (твърдо управление);
2) автоматично регулиране;
3) автоматична настройка.
Системите за автоматично управление с отворена верига от влияния обикновено се наричат отворени. В тези системи контролът се осъществява според законите; независимо от реалния ход на производството
Разработване на функционална схема на АТС
С адаптивно управление системата може дори да променя своята структура и параметри. Винаги се адаптира към оптималния процес на управление, адаптира се към промените в параметрите на контролирания обект. В процеса на управление, който се нарича обучение, адаптивната система е още по-съвършена. Той може да запомни получената информация и да я използва повторно в подобни ситуации.
Изкуственият интелект е система с най-висока степен на контрол. Една изкуствено създадена система може да разпознава обекти и явления и да анализира техните връзки. Това създава модели на околната среда и взема смислени решения и може да предвиди техните последствия. Една система с изкуствен интелект може да открие нови модели и дори да подобри работата си.
процес и се извършва в отворен цикъл, за да се получи определен краен резултат (фиг. 1.2, а).
Трудна задача на входа на системата през управляващото устройство CU и изпълнително устройство(усилвател) DUT действа върху контролния обект на операционния усилвател, на изхода на който се задава стойността х изходотговарящи на тази задача х в .
Принципи на работа на системата за управление на управляваната система
Има няколко начина за реализиране на автоматичен контрол. Логическите, непрекъснатите, дискретните и размитите контроли се различават един от друг по принципа на работа на системата за управление върху управляваната система. Какви са характеристиките на всеки тип шофиране?
Това се случва в резултат на разгръщането на компютри като контролер за управление на компютри, които не могат да обработват непрекъснат сигнал, се преобразува в дискретна връзка между входове и изходи, тъй като връзката между последователността от импулси, прочетена във времевата последователност на периода на вземане на проби от времето за вземане на проби се намалява чрез бърз контролиран процес.
- Контролът използва променливи с две стойности.
- Винаги има само две възможности.
- Количествата се изразяват като стойности 1 и 0.
- Връзките между променливите се наричат логически функции.
- Действието действие е постоянно зададено.
- Количествата се променят непрекъснато във времето.
- Създава непрекъсната връзка между входове и изходи.
В такива системи ходът на процеса и изходната контролирана стойност не се коригират (не се контролират), следователно може да се отклони от зададения режим. Управлението, използвано в такива системи, се нарича управление с отворена верига.
ACS с отворена верига от влияния се използват за осигуряване на определена последователност на работа на различни елементи на автоматичните устройства. В по-сложни случаи може да се извърши програмно управление на процес с отворен цикъл на въздействия. Пример е системата за управление на стартиране и спиране на двигатели.
Фактът, че управляващите функции се изчисляват цифрово в този случай е причина за дискретизация по време на работа на системата. Самият термин дискретна система, за разлика от непрекъсната система, означава, че стойностите, включени в процеса, са под формата на последователност от импулси, което съответства на представянето на функцията само в специфични и по принцип равни времеви интервали. Друг тип семплиране, също присъстващ в цифровите системи за управление, е квантуването на стойността на сигнала.
В реалните системи най-важната причина за появата на минимални стойности на промяна в допълнение към дължината на думата, използвана в микроконтролера, е точността на обработка, получена в аналогово-цифрови преобразуватели. Обща схемаДискретна система за управление е показана на фигурата. Блокът на контролера е представен в това решение чрез алгоритъм за управление, съдържащ се в програмата на микроконтролера. Измереното количество - което съставлява сигнала за обратна връзка - се въвежда в микроконтролера само в така наречените моменти на вземане на проби, повтарящи се с точка.
В системите за управление с отворен цикъл управлението се извършва според главното действие, което в общ случайможе да представлява програмни команди.
Този принцип се състои в това, че за да се намали отклонението на управляваната променлива от зададената стойност, което се появява поради инерцията на обекта на системата, управляващото действие се формира в съответствие с това действие и характеристиките на обекта на управление (Фиг. 1.2, а). 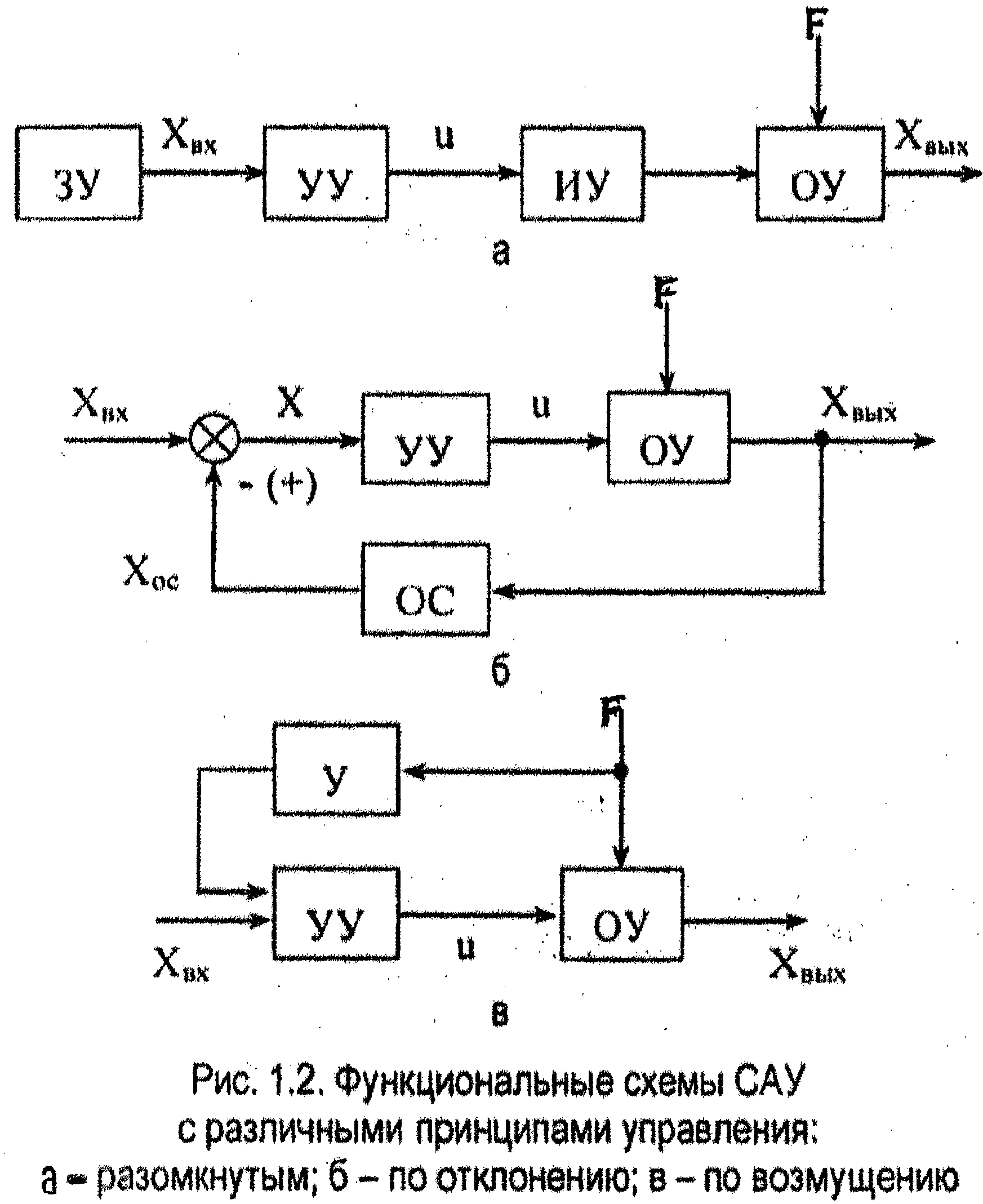
Резултатът от изчислението на алгоритъма за управление също се въвежда с честота на дискретизация, където или се използва в цифрова форма за управление на изпълнителната система, или изисква преобразуване в аналогова стойност. Дискретните цифрови схеми заменят аналоговите системи. Дигиталната система гарантира стабилността на контролните параметри във времето и при температурни промени, както и лесната им промяна, дори когато устройството се управлява. В процеса на работа е приемливо да се промени структурата на системата, което значително увеличава гъвкавостта на управлението.
Устройството за управление преобразува и усилва главното действие и генерира управляващото действие u(t).
Управляващото действие от изхода на управляващия блок влиза в контролния обект на управляващия блок и се стреми да промени контролираната стойност х изходв съответствие с движещата сила.
Такова управление се нарича твърдо, тъй като не отчита действителните стойности на контролираната променлива и смущаващите влияния (параметрите на ACS се считат за постоянни).
Като цяло цифровите контролери са много по-способни да използват съвременни методи за управление, като вземат предвид относително сложни математически операции. Процедурите за оптимизация, използвани в цифровите системи за управление, могат да вземат под внимание по-сложни критерии, като интегрални критерии, получени от модерни структури за управление на пространството на състоянията. Поради лекотата на промяна на параметрите по време на работа на системата, се създават контролери, които имат свойството да се самонастройват към параметрите на конкретен обект въз основа на измервания, извършвани автоматично по време на стартиране.
ОСНОВНИ ПРИНЦИПИ НА УПРАВЛЕНИЕ
В зависимост от методите за формиране на контролното действие се разграничават следните принципи на управление:
Принцип на контрол на смущенията,
Принцип на контрол на отклонението,
Принципът на комбинирано управление.
ПРИНЦИП НА КОНТРОЛ НА СМУЩЕНИЯТА
Намаляването или елиминирането на отклонението на управляваната променлива от необходимата стойност, причинено от влиянието на различни смущения в отворени системи, може да се извърши чрез прилагане на принципа на управление на смущенията, разгледан по-долу. Функционалната схема на контрола на смущенията е дадена на фиг. 1.2, c. Принципът на управление на смущенията е, че за да се намали или елиминира отклонението на контролираната променлива х изход от зададената стойност се измерва основният смущаващ ефект Е и се преобразува в управляващо действие u(t), приложено към входа на системата, за да се компенсира отклонението на контролираната променлива, причинено от смущението. Следователно в такива системи управляващото действие е функция на смущаващото действие.
в системи с принципа на управление чрез смущение за формиране на управляващото въздействие u(t) използва се пряка информация за смущаващия ефект. Следователно в тези системи е възможно напълно да се компенсира влиянието на смущаващото действие върху контролираната стойност х изход . Степента на компенсиране на влиянието на смущаващото влияние зависи от точността на измерване на смущаващото влияние и характеристиките на операционния усилвател.
Предимството на ACS с принципа на контрол на смущенията е, че те ви позволяват напълно да компенсирате смущаващия ефект. Такива системи за автоматично управление са с отворена верига, следователно, както във всяка система с отворена верига, тук няма проблем със стабилността.
Ако има няколко смущаващи влияния в системата, всички те могат да бъдат компенсирани поотделно по един и същ начин, ако е възможно да бъдат измерени. Това обаче усложнява системата. На практика се компенсират само смущаващи влияния, които най-рязко се отразяват на контролираната величина и предизвикват нейните значителни отклонения от изискваната величина. Такива смущения се наричат фундаментални. Незначителни смущения се наричат смущения, които причиняват само незначителни отклонения на контролираната стойност от зададената стойност.
Недостатъкът на такива ACS е, че те елиминират влиянието само на основните смущения. В допълнение, точността на регулиране и компенсация се намаляват, когато характеристиките на операционния усилвател се променят.
Принципът на контрол на смущенията се използва в системи, проектирани да поддържат постоянна контролирана променлива.
ПРИНЦИП НА КОНТРОЛ НА ОТКЛЮЧЕНИЕТО
Автоматичното регулиране се характеризира с това, че контролните функции са зависими от реалния ход на производството процес, за да се поддържа необходимата производителност товапроцес. Контролът и информацията за действителните стойности на показателите на този процес се извършват с помощта на обратна връзка.
В общия случай такава система за автоматично управление може да бъде показана на фиг. 1.2, б. Системата използва управление по затворен цикъл (принцип на обратната връзка или управление по отклонение). Контролното отклонение е разликата между реално измерената стойност и зададената стойност. Реципрочната разлика между зададената и действителната стойност се нарича контролна грешка. Устройството за управление се разбира като техническо устройство, с помощта на което обектът на управление се управлява автоматично.
Контролирана стойност х изход определя се от движещото влияние х в = х чна входа на системата, т.е. влиянието, въведено в системата и определящо необходимия закон за промяна на контролираната променлива. На входа на системата към елемента за сравнение, в допълнение към главното действие, чрез веригата за обратна връзка се подава действителната стойност на управляваната променлива. На изхода на елемента за сравнение, т.е. на входа на управляващото устройство CU се появява отклонение или управляващо действие
![]() ,
,
който осигурява изменение на контролираната величина по зададен закон.
Устройството за управление, в зависимост от размера и знака на анулирането, генерира регулиращо действие и.По този начин принципът на затворено управление отчита не само задачата, но и действителното състояние на обекта на управление и съществуващите смущения. Следователно този принцип е най-универсалният и ви позволява успешно да решавате проблеми с управлението, въпреки несигурността на обекта на управление и естеството на смущенията.
Класът на такива автоматични системи, изградени на базата на принципа на затворено управление, се нарича системи за автоматично управление (ACS). Свойството на универсалност на такива системи им позволява да се използват много широко в технологиите и природата.
Обратната връзка в затворените системи за автоматично управление служи за формиране на статичните и динамичните характеристики на системата. Тези характеристики се определят от предназначението на системата за автоматично управление и изискванията, наложени от технологичния процес. Обратната връзка управлява хода на процеса и при отклонение от зададената се подават коригиращи сигнали на входа на системата или на входа на група елементи, обхванати от тази обратна връзка.
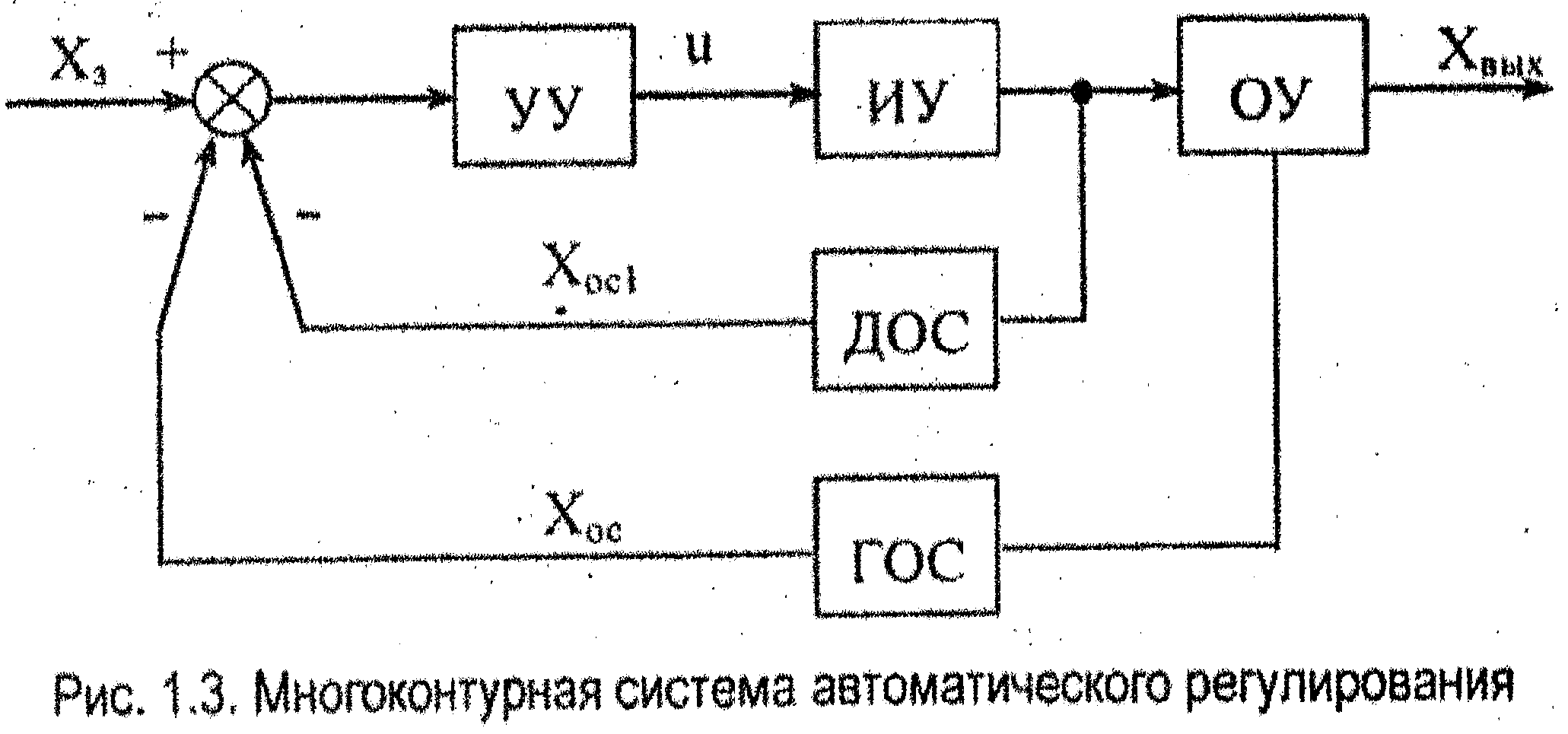
ACS трябва да има поне една обратна връзка, която служи за сравняване на действителните и зададените стойности на управляваната величина. Такава обратна връзка се нарича основна. Той свързва изхода на системата с нейния вход, като обхваща всички основни елементи. Системи, които имат една основна обратна връзка (GOS), се наричат едноконтурни. Някои ACS, в допълнение към основните обратни връзки (GOS), чийто брой се определя от броя (GOS) на контролираните променливи, може да има няколко допълнителни (локални). Допълнителната обратна връзка (DOS) свързва изхода на един или повече елементи на системата. ACS, които в допълнение към основната имат една или повече допълнителни обратни връзки, се наричат многоконтурни (фиг. 1.3).
В зависимост от характера на предаваното въздействие обратните връзки се делят на твърди и гъвкави. Твърдите обратни връзки работят както в стабилно състояние, така и в преходни режими. Гъвкавите обратни връзки работят само в преходни режими. Средствата за осъществяване на твърда обратна връзка са различни измервателни устройства - сензори, които предават сигнал към възела за сравнение. Средствата за реализиране на гъвкави обратни връзки са устройства за диференциране и интегриране.
Според ефекта върху системата обратната връзка се разделя на положителна и отрицателна. Положителен, ако управляващият сигнал на входа нараства с увеличаване на изходния сигнал, и отрицателен, ако управляващият сигнал на входа намалява с увеличаване на изходния сигнал.
Недостатъците на системите, управлявани от смущения, могат да бъдат елиминирани чрез използване на комбинирани системи за управление, при които контролът на смущенията се комбинира с контрол на отклонението. В този случай влиянието върху процеса на управление на основното смущение се елиминира. В допълнение, поради наличието на обратна връзка върху контролираната стойност , ефектът от незначителните смущения е ограничен. Понякога тези системи се наричат отворено-затворени. Имат относително висока точност на поддържане на зададена контролирана стойност.
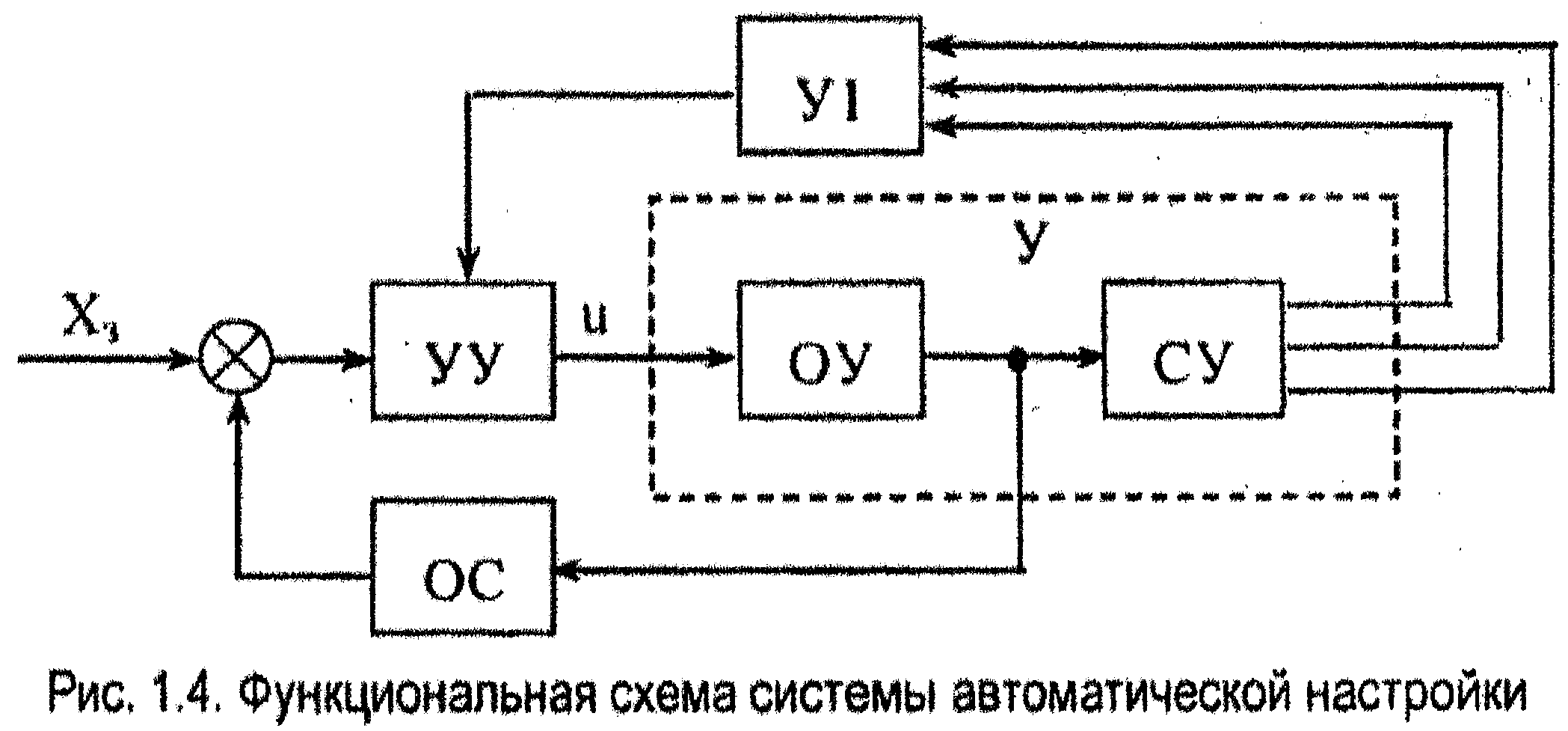
Функционалната схема на системата за управление, която осигурява настройката и избора на необходимия алгоритъм за управление в зависимост от промяната на работните условия и параметрите на обекта на управление, е показана на фиг. 1.4.
| Съдържание | 2 | |
| Въведение | 3 | |
| 1. | обща част | |
| 1.1. | Основни понятия | 6 |
| 1.2. | Описание на оригиналната схема за автоматично управление | 9 |
| 1.3. | Разработване на функционална схема на СКУД | 13 |
| 2. | Селищна част | |
| 2.1. | Параметричен синтез и анализ на едноконтурна САР | 14 |
| 2.1.1. | Оценка на възможността за статичен контрол | 15 |
| 2.1.2. | Оценка на възможността за астатичен контрол | 20 |
| 2.1.3. | Изследване на качеството на едноконтурна ATS | 22 |
| 3. | Разработване на управляващ контур със зададен параметър | 25 |
| Заключение | 27 | |
| Библиография | 28 |
Въведение
Съвременната теория на автоматичното управление е основната част от теорията на управлението. Автоматичната система за управление се състои от регулируем обект и контроли, които действат върху обекта, когато една или повече регулируеми променливи се променят. Под влияние на входните сигнали (управляващи или смущаващи) управляваните величини се променят. Целта на регулирането е да се формират такива закони, при които изходните регулирани променливи ще се различават малко от изискваните стойности. Решаването на този проблем в много случаи се усложнява от наличието на случайни смущения (шум). В този случай е необходимо да се избере такъв закон за управление, при който управляващите сигнали да преминават през системата с малки изкривявания, а шумовите сигнали практически да не се предават.
Теорията на автоматичното управление измина дълъг път в своето развитие. В началния етап бяха създадени методи за анализ на стабилността, качеството и точността на регулиране на непрекъснатите линейни системи. Тогава методите за анализ на дискретни и дискретни непрекъснати системи. Може да се отбележи, че методите за изчисляване на непрекъснати системи се основават на честотни методи, а изчисляването на дискретни и дискретно-непрекъснати системи се основава на методи на z-преобразуване.
В момента се разработват методи за анализ на нелинейни системи за автоматично управление. Нарушаването на принципа на суперпозицията в нелинейните системи, наличието на редица редуващи се (в зависимост от въздействието) режими на устойчиви, нестабилни движения и автоколебания усложняват техния анализ. Проектантът среща още по-големи трудности при изчисляването на екстремни и самонастройващи се системи за управление.
Както теорията на автоматичното управление, така и теорията на управлението са включени в науката под общото наименование "техническа кибернетика", която сега е получила значително развитие. Техническата кибернетика изучава общите закономерности на комплекса динамични системитехнологични и производствени процеси. Техническата кибернетика, автоматичното управление и автоматичното регулиране се развиват в две основни посоки: първата е свързана с постоянен прогрес и усъвършенстване на конструкцията на елементите и технологията на тяхното производство; вторият - с най-рационалното използване на тези елементи или техните групи, което е задачата за проектиране на системи.
Проектирането на системи за автоматично управление може да се извърши по два начина: чрез метода на анализ, когато с предварително избрана структура на системата (чрез изчисление или моделиране) се определят нейните параметри;
метод на синтез, когато според изискванията веднага се избира системата
неговата най-добра структура и параметри. И двата метода са широко разпространени практическа употребаи следователно са изцяло обхванати в тази книга.
Определянето на параметрите на системата, когато са известни нейната структура и изискванията към цялата система като цяло, се отнася до проблема за синтеза. Решението на този проблем с линеен контролен обект може да се намери, като се използват например честотни методи, методът на кореновото място или чрез изследване на траекториите на корените на характеристичното уравнение на затворена система. Избор на коригиращо средство чрез синтез в класната стая дробни рационални функциисложна променлива може да се извърши с помощта на графично-аналитични методи. Същите методи позволяват да се синтезират коригиращи устройства, които потискат самоосцилиращи и нестабилни периодични режими в нелинейни системи.
Методите за синтез бяха доразвити въз основа на принципите на максималното и динамичното програмиране, когато се определя оптималният закон за управление от гледна точка на даден критерий за качество, който осигурява горната граница на качеството на системата, която трябва да бъде към който се стремят при проектирането му. Решаването на този проблем обаче практически не винаги е възможно поради сложността на математическото описание на физическите процеси в системата, невъзможността за решаване на самата оптимизационна задача и трудностите при техническата реализация на открития нелинеен закон за управление. Трябва да се отбележи, че прилагането на сложни закони за управление е възможно само когато в системния контур е включен цифров компютър. Създаването на екстремни и самонастройващи се системи също е свързано с използването на аналогови или цифрови компютри.
Формирането на системи за автоматично управление, като правило, се извършва на базата на аналитични методи за анализ или синтез. На този етап от проектирането на системите за управление, въз основа на приетите допускания, се съставя математически модел на системата и се избира нейната предварителна структура. В зависимост от вида на модела (линеен или нелинеен) се избира изчислителен метод за определяне на параметрите, които осигуряват зададените показатели за стабилност, точност и качество. След това математическият модел се прецизира и с помощта на средствата математическо моделиранеопределят динамичните процеси в системата. Под действието на различни входни сигнали се вземат честотните характеристики и се сравняват с изчислените. След това окончателно се установяват границите на стабилност на системата във фаза и модул и се намират основните показатели за качество.
Освен това, задаване на типични контролни действия върху модела; премахване на характеристиките на точността. На базата на математическото моделиране се изготвят технически изисквания към оборудването на системата. От произведеното оборудване се сглобява контролер и се прехвърля към полуестествено моделиране, при което обектът на управление се събира под формата на математически модел.
Според характеристиките, получени в резултат на HIL моделирането, се взема решение за годността на контролера да работи с реален обект на регулиране. Окончателният избор на параметрите на контролера и настройката му се извършват в естествени условия по време на експерименталната разработка на системата за управление.
Развитието на теорията за автоматично управление, базирано на уравненията на състоянието и z-преобразуванията, максималния принцип и метода на динамично програмиране, подобрява метода за проектиране на системи за управление и ви позволява да създавате високоефективни автоматични системи за най-много различни индустрииНационална икономика. Получените по този начин автоматични системи за управление осигуряват високо качество на продуктите, намаляват тяхната себестойност и повишават производителността на труда.
1. Обща част.
1.1. Основни понятия
Системно входно преобразуване (контролно действие)в изходния сигнал (регулируема стойност)определя закона за изменение на регулираната стойност. Реализация на желаното законът се прилага в резултат на товаобразуване контролни променливи,които засягат контролираната система. Законите за изменение на регулираната стойност във времето могат да бъдат различни; математически те са описани системен оператор.Този оператор може да реализира пропорционалната зависимост на изходния сигнал от входния, връзката под формата на производна или интеграл и т.н. В по-общ случай този оператор може да бъде и нелинеен.
Трябва да се отбележи, че законите за промяна на контролираните стойности в машините и агрегатите се нарушават под въздействието на външни, а понякога и вътрешни влияния, наречени смущения. (или смущаващи влияния).От дефиницията на тези влияния може да се види, че системата за автоматично управление трябва да възпроизвежда управляващото действие възможно най-точно и да реагира възможно най-малко на смущаващото действие.
Има три различен принципизграждане на системи за управление, които осигуряват прилагането на необходимия закон за промяна на контролираната величина: отворен контур, затворен контур, комбиниран контуррегулиране (затворено-отворено). Принципът на отворения цикъл е да се осигури необходимия закон за промяна на контролираната променлива директно чрез преобразуване на управляващото действие. Принципът на затворен цикъл се характеризира със сравнение на управляващото действие с действителната промяна в контролираната променлива поради приложението обратна връзкаи елемент за сравнение. Сигналът за грешка в резултат на сравнението не трябва да надвишава определена предварително определена стойност. Благодарение на това в затворените системи се осигурява необходимият закон за изменение на управляваната величина. Комбинираният принцип се състои в комбинацията от затворени и отворени контури в една система.
Автоматичен контролнарича процесът, при който
операциите се извършват от система, която работи без човешка намеса в съответствие с предварително зададен алгоритъм.
Автоматична система със затворена верига на въздействие, в която управляващото (регулаторното) действие се генерира в резултат на сравняване на истинската стойност на контролираната (регулируема) величина с нейната зададена (предписана) стойност, се нарича ASR.
Производствен процес- набор от взаимосвързани трудови и технологични процеси, при изпълнението на които суровините и полуфабрикатите се превръщат в готови продукти.
Автоматиченса устройствата, които контролират различни процесии ги контролирайте без пряка човешка намеса.
Предметът или процесът, който трябва да се изучава, се нарича обект,и всички околни обекти, взаимодействащи с тях - външна среда.
Система- набор от елементи или устройства, които се намират във взаимоотношения и връзки помежду си и образуват определена цялост (единство).
Контролен обект- съвкупност от технологични устройства (машини, инструменти, механизация), които извършват този процес от гледна точка на управлението.
Контролна операция- осигурява в точното време началото, последователността и прекратяването на работните операции, разпределя необходимите ресурси за тяхното изпълнение.
Под управлениеразбиране на процеса на организиране на такова целенасочено въздействие върху обекта на управление, в резултат на което последният преминава в необходимото (целенасочено) състояние.
Параметрите на производствен процес или процес или процесен обект, които трябва постоянно да се поддържат или променят съгласно определен закон, се наричат контролирано количество.
Извиква се стойността на управляваната променлива, която според задачата трябва да бъде в даден момент зададената стойност на контролираната величина (контролиран параметър).
Извиква се диаграма, изобразяваща последователността от процеси в устройство или система структурна схема.
Връзка- елемент, включен в ACS, в който входният параметър се преобразува по определен начин в изходния параметър (схематично е изобразен като блок, но не отразява характеристиките на неговия дизайн).
Информацията винаги е свързана с материален носител на някаква физическа величина. AT технически системитакива носители се наричат носители на сигнал(например електрически напрежения и ток, налягане, механично движение и др.), които могат да се променят в съответствие с предаваната информация.
1.2. Описание на оригиналната схема за автоматично управление.
Тъй като обектът на регулация е елемент или звено на АТП, свойствата на АТП зависят преди всичко от свойствата на обекта на регулация. Следователно, за да се създаде работеща АКП, която осигурява необходимото качество на регулиране, е необходимо преди всичко да се познават свойствата на регулирания обект (спастични и динамични).
Обектът на регулиране на лабораторния стенд е обект с разпределени параметри, тъй като контролираната стойност (температура) не е еднаква в различни точки на обекта както в равновесно състояние, така и в преходен режим.
За увеличаване на инерцията на обекта, която трябва да бъде десет пъти по-голяма от тази, измерена в този обект от сензора, е предвидена метална чаша, пълна с чипове, в която се намира температурният датчик. Това ви позволява да увеличите топлинния обем на обекта.
Необходимата температура (референтна) се задава от уреда на входа на контролера-настройка (t e).
Смущение
Ориз. 1. Регулаторна схема.
Действителната температура се преобразува в сигнал от устройството t f. Означавайки сигналите на изхода на тези устройства с подобни на тях букви, ние изразяваме действителното отклонение от необходимото под формата на сигнал: ∆t = t e - t f; наречено отклонение или несъответствие. Контролерът преобразува ∆t по определен закон за управление и включва задвижващия механизъм. В нашия случай задачата на регулатора е ликвидността на отклоненията ∆t, причинени от действието на смущения B, т.е. различни натоварвания върху контролните обекти (промени в температурата на околната среда, промени в позицията на вратата и др.).
Грешка ∆t може да възникне и поради промяна в t e, но тъй като това е функция, известна предварително, грешката също може да бъде изчислена предварително и компенсирана. Такава система се нарича система за програмно управление или просто ACS.
Стойката осигурява двупозиционно регулиране. В този случай е необходимо да отворите амортисьора, така че електрическият нагревателен елемент постоянно да се издухва от въздух. Температурата се контролира чрез включване или изключване на нагревателния елемент от релейния елемент.
За да се определят динамичните свойства на обекта, в стойката е монтирано самозаписващо устройство, което регистрира температурните промени в обекта и ги фиксира върху диаграмна лента.
Всяка технологична единица, която е обект на регулиране на ОР, работи в стабилно състояние, ако в нея се спазва напълно материалният и енергийният баланс. Основният параметър, характеризиращ условията за протичане на технологичния процес (в нашия обект това е температурата), остава непроменен в стационарно състояние.
Зависимостта на изходната стойност от входната стойност в установено състояние се нарича статична характеристика на ИЛИ. Статичните характеристики могат да бъдат както линейни, с различни коефициенти на наклон, така и нелинейни, докато повечето реални обекти като цяло имат нелинейни.
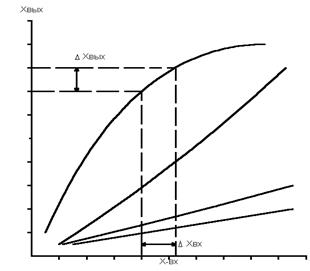
Фиг. 1.1. Статични характеристики на ИЛИ.
Тези характеристики на ИЛИ позволяват да се оцени степента на връзка между различните входни и изходни стойности на обекта.
Статичните характеристики се определят чрез изчисление или експериментално.
Динамична характеристика на обекта на регулациясе нарича зависимостта на изходната стойност от входната в преходен режим.
Тъй като промените в изходната стойност на RR при различни смущения могат да се появят по различни начини, типичните външни влияния обикновено се използват за изследване на динамичните характеристики на обекта.
Температурната крива на ускорение на ACS (фиг. 1.2.) показва динамичните свойства на OR.
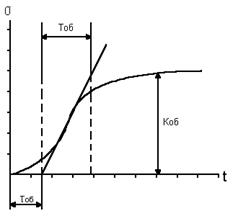
Фиг. 1.2. Крива на ускорението
Фигурата показва, че обектът има способността постепенно да спре отклонението на изходната стойност от първоначалната стойност и отново да се възстанови равновесното състояние, т.е. обектът има свойството за самоподравняване. Такива обекти се наричат статични.
Обектът има забавяне T около, и тъй като Не е значимо и ще бъде пренебрегнато по-нататък.
Времевата константа на обекта T about е условното време, през което изходната стойност би се променила от първоначалната стойност до нова стойност в стабилно състояние, ако тази промяна се случи със скорост, която е постоянна и максимална за даден преходен процес. Времевата константа характеризира инерцията на обект, която се разбира като способността му бавно да натрупва и консумира материя и енергия, което става възможно поради наличието на съпротивления и капацитети в ИЛИ, които предотвратяват тяхното влизане и излизане.
Коефициентът на предаване K около ИЛИ е промяна в изходната стойност на обекта по време на прехода от първоначалното към новото към стабилно състояние, отнесено към единично смущение на входа.
Единично смущение се счита за еднопроцентно изменение на входната стойност на обекта (отместване на регулаторния орган).
По този начин:

където x oе стойността на изходната величина в първоначалното стабилно състояние; X(∞)– също, но за ново стабилно състояние; ∆Х ве големината на въведеното смущение; % ход на регулатора.
1.3. Разработване на функционална схема на СКУД.
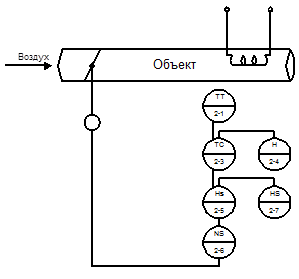
Фигура 2. Трипозиционен контролен контур.
Обектът на регулиране е статичен по своите характеристики със самонастройка със закъснение на предаване, което допринесе за избора на пропорционално-интегрален регулатор.
Веригата включва измерване на температурата на охлаждащата течност и сравняване със задачата, регулаторът чрез HS - ръчен блок за управление, включва контакта "повече" или "по-малко" безконтактен стартер NS, който от своя страна управлява задвижващия механизъм, т.е. подаване на въздух към охлаждащата течност.
При двупозиционно регулиране релейният елемент регулира включването на охлаждащата течност.
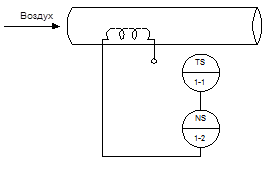
Фигура 3. Двупозиционен контролен контур.
Когато се достигне определена температура, стартерът изключва захранването на електрическия нагревателен елемент. Измерването и регулирането на температурата се извършва от динамометричен датчик - температурно реле.
2. Селищна част.
2.1. Параметричен синтез и анализ на едноконтурни САР.
Анализът на системите за автоматично управление с елементи на електроавтоматиката се извършва с помощта на алгебричните критерии на Гаус и Хурвиц, критерия на Ляпунов, честотните критерии на Михайлов, Найквист - Михайлов и др.
При анализа на ACS се изследват проблемите на стабилността и други качествени показатели на отворени и затворени ACS, намират се граници на стабилност в модул и фаза, определят се астатизъм на затворени системи, проценти на грешки за серво системи и др.
Основните качествени показатели на системите, които се определят след намиране на така наречените h-функции, включват следното:
1. Времето на преходния процес t p, след което контролираната стойност ще остане близка до постоянната стойност;
2. Постоянна стойност на управляваната величина h¥=limh(t)=h y ;
3. Максимално превишение y=(h max -h y)/h y (тук h max е стойността на първия максимум);
4. Честота на трептене w=2p/T (тук T е периодът на трептене);
5. Броят на трептенията на преходния процес n;
6. Време за достигане на първия максимум t max ;
Важен показател за качеството на СКУД е тяхната надеждност. Качествените показатели се определят чрез решаване диференциални уравнения, които описват вече известни ACS структури.
Синтезът на ACS се състои в намирането на неговите структури и параметри, които да отговарят на зададените показатели за качество. Синтезът е по-трудна задача от анализа. Основните методи, използвани при синтеза на АСУ са аналитични, графо-аналитични и машинни (с помощта на компютри).
2.1.1. Оценка на възможността за статично регулиране.
При избора на регулатор е необходимо да се знае числената динамична информация за обекта на регулиране, т.е. K 0 ; T около; t 0 , което определяме от характеристиката на ускорението.
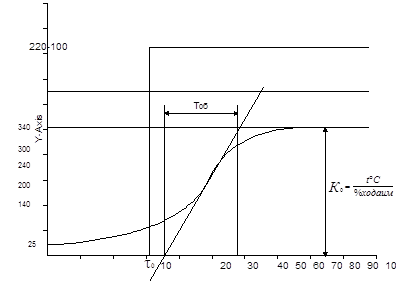
Фиг. 4. Крива на ускорение на температурата на ACS на лабораторния стенд.
Типът на регулатора е ориентировъчно избран по отношение на t/T около;
Критерии за избор на регулатори по вид действие.
За да се изследва и изчисли структурната схема на ASR чрез еквивалентни трансформации, е необходимо да се намали до най-простата стандартна форма на обект-регулатор. Това е необходимо, първо, за да се определят неговите функции за прехвърляне и следователно математическите зависимости, които определят преходните процеси в системата, и второ, като правило, всички инженерни методи за изчисляване и определяне на настройките на контролерите са приложен към такива стандартни структури.
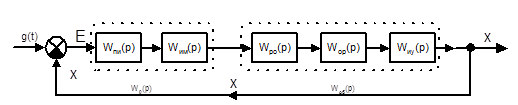
Така че оригиналната блокова диаграма на температурната ACS според типична функционална диаграма (вижте чертежите) може да бъде представена, както е показано на фигурата.
Където W P (p), W IM (p), W PO (p), W OP (p), W IU (p), са съответно трансферните функции на контролера, задвижващия механизъм, регулаторния орган, контролния обект и измервателното устройство .
На структурната диаграма всички влияния (сигнали) трябва да бъдат посочени в трансформираната форма на Лаплас.
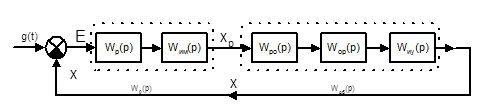
Фигура 5. Трансформирана блокова схема на ACS (t).
Всички връзки, които определят динамичните свойства на интерфейсните възли (връзки, взаимовръзки) на обект с регулатор (например регулаторни органи, комуникационни линии, измервателни устройства, сензори и т.н.), е препоръчително, като правило, да се отнасят към обекта на регулация.
Ако контролерът и задвижващият механизъм директно прилагат закона за управление в системата, тогава трансферната функция на контролера
W P (p) \u003d W y (p) W IM (p)
Статичното регулиране се характеризира с наличието на P-регулатор, тогава
W P (p) \u003d K обл
При оптимизиране на стойностите, според експериментални данни, е препоръчително да се вземе K - коефициентът на регулатора да се приеме K = 10
Трансферната функция на регулирания обект, като се вземат предвид връзките, свързани със самия обект, има формата:
W около (p) \u003d W PO (p) W OP (p) W IU (p)
В общия случай всяка едномерна ACS с основна обратна връзка, чрез постепенно укрепване на връзките, може да бъде сведена до най-простата форма, трансферната функция на отворена система, която
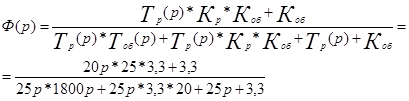
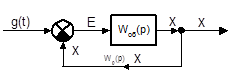 W(p)=W P (p)*W OB (p)
W(p)=W P (p)*W OB (p)
Температурната крива на ускорение ACS показва, че обектът е инерционен, статичен и има забавяне, тъй като забавянето е незначително. При по-нататъшни изследвания те могат да бъдат пренебрегнати. Тогава трансферната функция на обекта ще изглежда така:
W около (p) \u003d K около / (T около p + 1)
Предавателна функция на отворена система
W(p)=W P (p)*W OB (p)
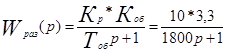 - със статично регулиране.
- със статично регулиране.
Фигура 6. LAFC и LFC за обекта.
Фигура 7. AFC за обект.
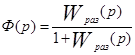
Нека намерим предавателната функция на затворената система:
защото определя се стойността на времеконстантите характеристики на дизайнаелементи на системата, тогава настройката на системата за управление се извършва само чрез промяна на нейния коефициент K чрез въздействие върху коефициента на предаване K p на регулатора.
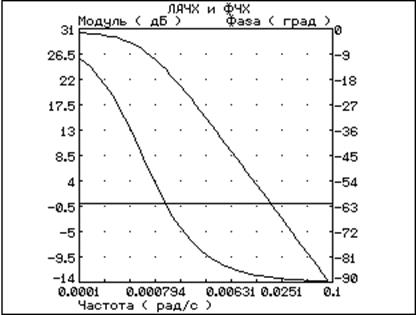
За да определим стабилността на системата, ние изграждаме амплитудно-честотните, фазово-честотните характеристики в логаритмична скала и изграждаме ходограф с помощта на затворена система.
![]()
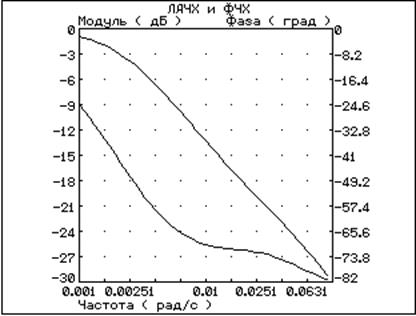
Фиг. 8. LAHCH и LPCH със статично регулиране.
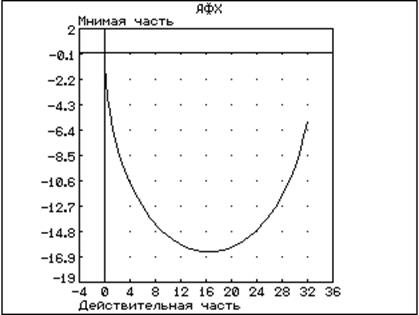
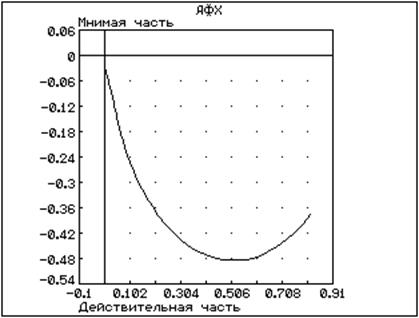
Фигура 9. Амплитудно-фазова характеристика на затворена система.
Според графиките виждаме, че при коефициент на регулатора K p = 10 запасът на стабилност е изпълнен, т.к. при граничната честота wav фазата е по-малка от 180°, което характеризира стабилността на системата при статично управление, което означава, че е възможно да се използва P-регулатор за температурна ACS.
2.1.2. Оценка на възможността за астатично регулиране.
Един от признаците на астатична връзка (или системата като цяло) е наличието на комплексна променлива P като фактор в знаменателя на трансферната функция, т.е. наличието на интегриращ компонент.
Нека разгледаме възможността за PI-закон за управление на ACS на температурата. За целта ще изградим блокова схема, в която ще включим PI контролер.
Фигура 10. Структурна схема SAR температура.
Предавателната функция на PI регулатора има формата
W P (p)=K+1/T p; (K=20; Tu=25 сек.)
Нека намерим предавателната функция на отворена система
W пъти (p) \u003d W p (p) W около (p)
Намерете предавателната функция на затворена система
Въз основа на трансферната функция на отворената система изграждаме LFC и LFC, а функцията на затворената система изграждаме AFC.
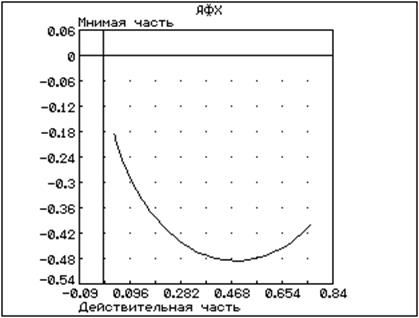
Фигура 11. Амплитудно-фазова характеристика на затворена система.
Фигура 12. LAFC и LPFC с астатична регулация.
Честотните характеристики показват, че системата има граница на стабилност както по амплитуда, така и по фаза, тъй като при гранична честота w ср. фаза< 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Изследване на качеството на едноконтурна система за автоматично управление.
Да се автоматични системирегулацията налага изисквания не само към неговата устойчивост. За работата на системата е не по-малко необходим процесът на автоматично управление при определени качествени показатели.
Изискванията за качеството на регулаторния процес във всеки случай могат да бъдат много разнообразни, но от всички показатели за качество могат да се разграничат няколко от най-значимите, които определят качеството на почти всички АКТБ с достатъчна пълнота.
Качеството на процеса на регулиране на системата, като правило, се оценява от неговата преходна функция.
Основните показатели за качество са: - време на регулиране t p - е времето, през което, започвайки от момента на прилагане на въздействието върху системата, се наблюдават отклоненията на контролираната стойност Dh(t) от нейната установена стойност h 0 =h( ¥) ще бъде по-малко от предварително зададената стойност E. Обикновено се приема, че след изтичане на времето за регулиране, отклонението на регулираната стойност от стойността в стационарно състояние трябва да бъде не повече от E = 5%. По този начин времето за регулиране определя продължителността (скоростта) на преходния процес.
Превишение s е максималното отклонение Dh max на контролираната променлива от постоянната стойност, изразено като процент от h 0 =h(¥).
Абсолютната стойност на Dh max се определя от преходната крива:
Dh max \u003d h max - h (¥)
Съответно превишението ще бъде равно на:
Трептенията на системата се характеризират с броя на трептенията на контролираната величина по време на регулиране t p. Ако през това време преходният процес в системата направи броя на трептенията по-малък от зададения, тогава се счита, че системата има необходимото качество на регулиране по отношение на нейното трептене;
Постоянна грешка E. Постоянната стойност на управляваната променлива h 0 в края на преходния процес зависи от астатизма n на системата. AT статични системи(n=0) – стационарна грешка при постоянна стойноствходното действие не е равно на 0 и следователно постоянната стойност на управляваната променлива h 0 ще се различава от зададената стойност със стойността на грешката в стационарно състояние.
За канала на смущаващото влияние стойността на грешката се определя от израза
![]()
където x 0 е постоянна движеща сила; K е коефициентът на пренос на системата.
Чрез канала на смущаващото влияние, стойността на грешката според израза
където f 0 е постоянно смущаващо действие; K о - коефициентът на пренос на обекта на регулация; K p - коефициентът на пренос на регулатора.
Сравнявайки преходните функции на статично и астатично управление, ние избираме оптималния регулатор за температурна ACS.
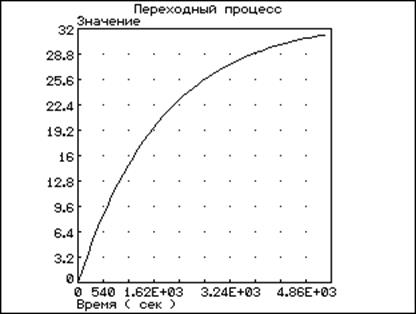
Фиг. 13. Преходна функция на ACS с P-регулатор
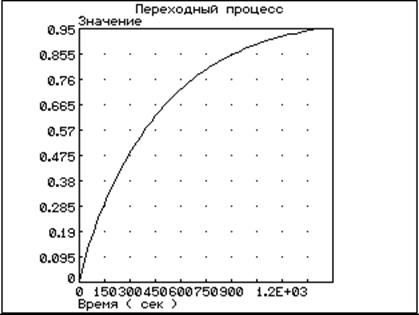
Фигура 14. Преходна функция на ACS с PI контролер
Графиките показват, че времето за регулиране с PI регулатор е по-кратко отколкото с P регулатор; това означава, че за температурни ACS е целесъобразно да се използва импулсен контролер, който изпълнява закона за PI-регулиране.
За изчисленията е използвана програмата Classic на компютър.
3. Разработване на схема на управляващ контур по зададен параметър.
Схемите са направени в съответствие с GOST 2.710-81.
Фигура 15. Трипозиционен контролен контур.
Електрозахранването на лабораторния стенд се осъществява от автоматично захранване SF1 схема № 003E3. В този случай нагревателният елемент на обекта за управление се включва чрез отварящия контакт KM 1.1. реле KM 1 и вторично показващо самозаписващо устройство KSU 4. В позиция 90 ° на универсалния превключвател SA1, двигателят на вентилатора. В позиция -45°, ключ SA1, е включен в позиционно регулиране, в позиция +45° - трипозиционно регулиране.
При 2-позиционно регулиране намотката на релето KM1 се включва чрез отварящия контакт на сензора TUDE1. Когато зададената температура на сензора бъде превишена, контактът му се отваря и отваря контакта KM1.1, изключвайки нагревателния елемент, което се индикира от сигналната лампа HL4.
Трипозиционното регулиране е показано на схема № 004E2. В автоматичен режим електрическият сигнал от термопреобразувателя TSMU се подава последователно първо към входа на устройството KSU4(2), клема 12 и през клема 11 влиза във входа 25 на блока за управление RBI 1-P.
Токов сигнал, пропорционален на зададената стойност на температурата, също се подава към входа на RBI 1-P клема 21 от настройката RZD.
На изхода на регулатора клеми 7 и 9 дават съответно сигнал „По-малко“ и „Повече“ спрямо средната точка на клема 10. Сигналът преминава през BRU и отварящите контакти SQ1 и SQ2 на IM задвижващ механизъм, който управлява FBR стартера, клеми 7 и 9. FBR включва IM контакти 1, 2 и 3.
В режим на ръчно управление IM се предава от бутоните BRU "Още" или "По-малко".
Заключение
За изчислената система на обекта са направени следните изчисления:
Разработване на функционална схема на автоматично управление. Получени са предавателната функция и структурната трансформация на схемата на обекта на управление. Построени са честотните характеристики на обекта на управление. Направена е оценка на възможностите на статичен обект на управление (П-регулатор), както и оценка на възможността на астатичен обект на управление (ПИ-регулатор). Извършено е изследване на качеството на едноконтурна система за автоматично управление.
Изграждането на желаните честотни характеристики на коригираната система е завършено. Извършва се избор и изчисляване на коригиращото устройство. Беше оценено качеството на настроената система.
Завършена е разработката на схема на управляващ контур за даден параметър.
Въз основа на изчисленията можем да кажем, че изборът на коригиращо устройство е направен правилно и отговаря на качествените показатели на системата с извършената корекция.
Библиография.
- И.Ю. Топчев "Атлас за проектиране на ОСП"
- пр.н.е. Чистяков "Кратко ръководство за топлотехнически измервания"
- Н. Н. Иващенко " Автоматично регулиране»
4. В.В. Черенков "Промишлени устройства и средства за автоматизация"
Съветваме ви да прочетете
 Психологически характеристики на децата в юношеска възраст
Психологически характеристики на децата в юношеска възраст Преместване на дете в друго училище - процедурата и необходимите документи Дали да се премести дете в друго училище
Преместване на дете в друго училище - процедурата и необходимите документи Дали да се премести дете в друго училище, диагноза, лечение. Лечение на урогенитална хламидия") Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение. Лечение на урогенитална хламидия
Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение. Лечение на урогенитална хламидия Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво
Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво

