electromagnetic moment a kasabay na motor ay nilikha sa pamamagitan ng pakikipag-ugnayan ng kasalukuyang sa rotor winding na may umiikot na magnetic field.
Electromagnetic na sandali M proporsyonal sa electromagnetic power:
 (3.40)
(3.40)
Angular na kasabay na bilis ng pag-ikot.
Ang pagpapalit sa (3.39) ng halaga ng electromagnetic power (3.33), nakukuha natin:
 , (3.41)
, (3.41)
i.e. ang electromagnetic moment ng isang induction motor ay proporsyonal sa kapangyarihan ng mga pagkalugi ng kuryente sa rotor winding.
Kung ang halaga ng kasalukuyang rotor ayon sa expression (3.28) ay pinalitan sa (3.41), pagkatapos ay makuha namin ang formula electromagnetic na sandali asynchronous na makina (Nm):
 (3.42)
(3.42)
Mga parameter ng katumbas na circuit ng asynchronous machine r 1 , r¢ 2 , x 1 at x¢ 2, kasama sa expression (3.42), ay pare-pareho, dahil ang kanilang mga halaga ay nananatiling halos hindi nagbabago sa mga pagbabago sa pagkarga ng makina. Ang boltahe sa stator phase winding ay maaari ding ituring na pare-pareho. U 1 at dalas f1. Sa mga tuntunin ng sandali M ang tanging variable ay slip s, na para sa iba't ibang mga mode ng pagpapatakbo ng isang asynchronous na makina ay maaaring tumagal sa iba't ibang mga halaga sa hanay mula + ¥ hanggang -¥ (tingnan ang Fig. 3.5).
Isaalang-alang ang pag-asa ng metalikang kuwintas sa slip M = (mga) f sa U 1= const, f1= const at pare-pareho ang mga parameter ng katumbas na circuit. Ang dependency na ito ay tinatawag mekanikal na katangian asynchronous na makina. Pagsusuri ng pagpapahayag (3.42), na isang analytical na pagpapahayag ng isang mekanikal na katangian M = (mga) f, ay nagpapakita na para sa mga halaga ng slip s= 0 at s= ¥ electromagnetic moment M= 0. Mula dito sumusunod na ang mekanikal na katangian M = (mga) f may maximum.
Upang matukoy ang kritikal na slip s cr, na tumutugma sa pinakamataas na sandali, kinakailangang kunin ang unang derivative ng (3.42) at ipantay ito sa zero: . Ang resulta
 (3.43)
(3.43)
Ang pagpapalit ng halaga ng kritikal na slip (ayon sa 3.43) sa expression para sa electromagnetic moment (3.42), pagkatapos ng isang serye ng mga pagbabago, nakuha namin ang expression para sa maximum na sandali (N m):
 (3.44)
(3.44)
Sa (3.43) at (3.44) ang plus sign ay tumutugma sa motor mode, at ang minus sign sa generator mode ng pagpapatakbo ng asynchronous machine.
Para sa mga asynchronous na makina Pangkalahatang layunin aktibong paglaban ng paikot-ikot na stator r1 mas mababa kaysa sa kabuuan ng mga inductive reactances: r1< < (x 1 + x¢ 2). Samakatuwid, ang pagpapabaya sa halaga r1, nakakakuha kami ng mga pinasimpleng expression para sa kritikal na slip
 , (3.45)
, (3.45)
at maximum na metalikang kuwintas (N m)
 (3.46)
(3.46)
kanin. 3.10. Depende sa mga operating mode ng isang asynchronous na makina sa slip
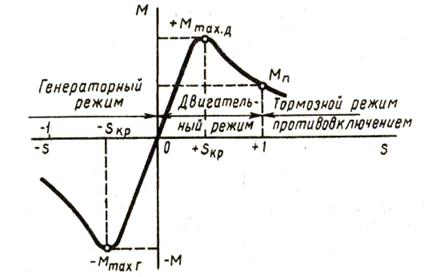
Ang pagsusuri sa pagpapahayag (3.44) ay nagpapakita na maximum na sandali mayroong mas maraming asynchronous na makina sa generator mode kaysa sa motor mode ( M max Г > М maxD). Sa fig. Ipinapakita ng 3.4 ang mekanikal na katangian ng isang asynchronous na makina M = (mga) f sa U 1= const. Ang katangiang ito ay nagpapahiwatig ng mga zone na naaayon sa iba't ibang mga mode ng operasyon: motor mode (0< s < 1), когда электромагнитный момент M ay umiikot; generator mode ( - ¥ < s < 0) и тормозной режим противовключением (1 < s < + ¥), когда электромагнитный момент M ay nagbabawal.
Mula sa (3.42) sumusunod na ang electromagnetic torque ng isang induction motor ay proporsyonal sa parisukat ng boltahe ng mains: M ≡ U 1 2. Ito ay lubos na nakakaapekto sa pagganap ng motor: kahit na ang isang bahagyang pagbaba sa boltahe ng mains ay nagdudulot ng kapansin-pansing pagbawas sa metalikang kuwintas ng asynchronous na motor. Halimbawa, kapag ang boltahe ng mains ay nabawasan ng 10% na may kaugnayan sa nominal ( U 1 = 0.9U nom) ang electromagnetic torque ng motor ay nabawasan ng 19%: М¢ = 0.9 2 M = 0.81M, saan M— sandali sa rate na boltahe ng network, at M¢ - metalikang kuwintas sa pinababang boltahe.
Upang pag-aralan ang pagpapatakbo ng isang asynchronous na motor, mas maginhawang gamitin ang mekanikal na katangian M = f(s), ipinapakita sa fig. 3.5.
 |
kanin. 3.11. Ang pag-asa ng electromagnetic torque ng isang induction motor sa slip
Kapag ang motor ay konektado sa network, ang stator magnetic field, nang walang inertia, ay agad na nagsisimulang umiikot na may kasabay na dalas. n 1, sa parehong oras, ang rotor ng motor sa ilalim ng impluwensya ng mga puwersa ng inertia sa paunang sandali ng pagsisimula ay nananatiling hindi gumagalaw ( n 2= 0) at pag-slide s = 1.
Papalitan sa (3.42) ang slip s= 1, nakukuha namin ang expression para sa panimulang metalikang kuwintas ng isang asynchronous na motor (N m):
 (3.47)
(3.47)
Sa ilalim ng pagkilos ng sandaling ito, nagsisimula ang pag-ikot ng rotor ng motor, habang bumababa ang slip, at tumataas ang metalikang kuwintas alinsunod sa katangian. M = (mga) f. Sa kritikal na slip s cr Ang sandali ay umabot sa pinakamataas na halaga nito M ma x.
Sa isang karagdagang pagtaas sa bilis ng pag-ikot (pagbawas ng slip), ang sandali M nagsisimulang bumaba hanggang umabot ito sa isang matatag na halaga na katumbas ng kabuuan ng mga counteracting moments na inilapat sa motor rotor: moment XX M0 at kapaki-pakinabang na load torque (torque sa motor shaft) M 2, yan ay
M \u003d M 0 + M 2 \u003d M st. (3.48)
Dapat tandaan na sa mga slip na malapit sa pagkakaisa (simulang mode ng motor), ang mga parameter ng katumbas na circuit ng isang asynchronous na motor ay kapansin-pansing nagbabago ng kanilang mga halaga. Ito ay higit sa lahat ay ipinaliwanag sa pamamagitan ng dalawang mga kadahilanan: nadagdagan ang magnetic saturation ng mga may ngipin na mga layer ng stator at rotor, na humahantong sa isang pagbawas sa inductive leakage resistance x 1 at x 2, at ang epekto ng kasalukuyang pag-aalis sa mga rotor bar, na humahantong sa isang pagtaas sa aktibong paglaban ng rotor winding r 2 ¢. Samakatuwid, ang mga parameter ng katumbas na circuit ng isang asynchronous na motor na ginamit sa pagkalkula ng electromagnetic torque ayon sa (3.42), (3.44) at (3.46) ay hindi maaaring gamitin upang kalkulahin ang panimulang torque ayon sa (3.47).
Static na sandali M st ay katumbas ng kabuuan ng mga counteracting moment na may pare-parehong pag-ikot ng rotor ( n 2= const). Ipagpalagay natin na ang counteracting moment sa motor shaft M 2 tumutugma sa na-rate na pagkarga ng motor. Sa kasong ito, ang matatag na estado ng pagpapatakbo ng engine ay tinutukoy ng isang punto sa mekanikal na katangian na may mga coordinate M = M nom at s = s nom, saan M nom at s nom- mga nominal na halaga ng electromagnetic torque at slip.
Mula sa pagsusuri ng mekanikal na katangian ay sumusunod din ito, na ang matatag na operasyon ng isang induction motor ay posible na may mga slip na mas mababa kaysa sa kritikal (s< s кр ), ibig sabihin, sa seksyong OA ng mekanikal na katangian. Ang katotohanan ay nasa lugar na ito na ang isang pagbabago sa pagkarga sa baras ng motor ay sinamahan ng isang kaukulang pagbabago sa electromagnetic torque.
Kaya, kung ang makina ay tumatakbo sa nominal mode ( M nom; s nom), kung gayon ang mga sandali ay pantay-pantay: M nom \u003d M 0 + M 2. Kung mayroong pagtaas sa metalikang kuwintas ng pagkarga M 2 hanggang sa halaga M¢ 2, pagkatapos ay lalabagin ang pagkakapantay-pantay ng mga sandali, i.e. M nom< М 0 + М 2 , at ang bilis ng rotor ay magsisimulang bumaba (tataas ang slip). Ito ay hahantong sa pagtaas ng electromagnetic torque sa isang halaga M¢ \u003d M 0 + M¢ 2, (point B), pagkatapos nito ang mode ng pagpapatakbo ng engine ay muling magiging matatag.
Kung, sa panahon ng pagpapatakbo ng engine sa nominal mode, ang load torque ay bumababa sa halaga М¢¢ 2, kung gayon ang pagkakapantay-pantay ng mga sandali ay muling lalabagin, ngunit ngayon ang metalikang kuwintas ay magiging mas malaki kaysa sa kabuuan ng mga magkasalungat: M nom > M 0 + M¢¢ 2. Ang bilis ng rotor ay magsisimulang tumaas (ang slip ay bababa), at ito ay hahantong sa pagbaba sa electromagnetic torque M hanggang sa halaga M¢¢ \u003d M 0 + M¢¢ 2(punto C); ibabalik muli ang stable mode of operation, ngunit sa ibang mga halaga M at s.
Ang pagpapatakbo ng isang induction motor ay nagiging hindi matatag sa panahon ng pagdulas s³s cr. Kaya, kung ang electromagnetic metalikang kuwintas ng engine M = M max, at madulas s = s cr, pagkatapos ay kahit isang bahagyang pagtaas sa sandali ng pagkarga M 2, na nagiging sanhi ng pagtaas ng slip s, ay hahantong sa pagbaba sa electromagnetic torque M. Ito ay susundan ng karagdagang pagtaas sa slip, at iba pa, hanggang ang slip ay umabot sa halaga s= 1, ibig sabihin, hanggang sa huminto ang rotor ng motor.
Kaya, kapag ang electromagnetic torque ay umabot sa pinakamataas na halaga nito, ang limitasyon ng matatag na operasyon ng induction motor ay pumasok. Samakatuwid, para sa matatag na operasyon ng makina, kinakailangan na ang kabuuan ng mga sandali ng pagkarga na kumikilos sa rotor ay mas mababa kaysa sa pinakamataas na metalikang kuwintas: M st \u003d (M 0 + M 2)< М тах . Ngunit upang maging maaasahan ang pagpapatakbo ng isang induction motor at upang ang mga random na panandaliang overload ay hindi maging sanhi ng paghinto ng motor, kinakailangan na mayroon itong overload na kapasidad.
Labis na kapasidad ng motor λ ay tinutukoy ng ratio ng maximum na sandali M max sa nominal M nom. Para sa induction motors pangkalahatang layunin ng overload na kapasidad ay = 1.7 ÷ 2.5.
Dapat mo ring bigyang-pansin ang katotohanan na ang pagpapatakbo ng makina kapag dumudulas s< s кр , i.e., sa nagtatrabaho na seksyon ng mekanikal na katangian, ay ang pinaka-ekonomiko, dahil ito ay tumutugma sa mga maliliit na halaga ng slip, at, dahil dito, sa mas mababang mga halaga ng mga pagkalugi ng kuryente sa rotor winding. P e2 \u003d sP em.
Ang paggamit ng formula (3.35) para sa pagkalkula ng mga mekanikal na katangian ng mga asynchronous na motor ay hindi laging posible, dahil ang mga parameter ng katumbas na circuit ng mga motor ay karaniwang hindi ibinibigay sa mga katalogo at mga sangguniang libro, samakatuwid, para sa mga praktikal na kalkulasyon, ang isang pinasimple na torque formula ay karaniwang ginagamit. Ang formula na ito ay batay sa pagpapalagay na ang aktibong paglaban ng stator winding ng isang induction motor r1= 0, habang:
 (3.49)
(3.49)
Ang kritikal na slip ay tinutukoy ng formula:
![]() . (3.50)
. (3.50)
Ang pagkalkula ng mekanikal na katangian ay mas simple kung ito ay isinasagawa sa mga kamag-anak na yunit  . Sa kasong ito, ang mekanikal na katangian ng equation ay may anyo:
. Sa kasong ito, ang mekanikal na katangian ng equation ay may anyo:
 . (3.51)
. (3.51)
Ang paggamit ng isang pinasimple na formula (3.51) ay pinakaangkop kapag kinakalkula ang gumaganang seksyon ng mekanikal na katangian sa panahon ng pag-slide s< s кр , dahil sa kasong ito ang error ay hindi lalampas sa mga halagang pinapayagan para sa mga teknikal na kalkulasyon. Kapag dumudulas s > s cr ang error ay maaaring umabot sa 15-17%.
Mga mekanikal na katangian ng isang asynchronous na motor na may mga pagbabago sa boltahe ng mains at aktibong paglaban ng rotor winding
Mula sa (3.42), (3.44) at (3.47) makikita na ang electromagnetic torque ng induction motor, pati na rin ang maximum at panimulang halaga nito, ay proporsyonal sa parisukat ng boltahe na ibinibigay sa stator winding: M ≡ U 1 2 . Kasabay nito, ang pagsusuri ng expression (3.43) ay nagpapakita na ang halaga ng kritikal na slip ay hindi nakasalalay sa boltahe. U 1 . Nagbibigay ito sa amin ng pagkakataong i-plot ang mga mekanikal na katangian M = f(s) para sa iba't ibang halaga Boltahe U 1(Larawan 3.12), mula sa kung saan sinusundan nito ang mga pagbabago sa boltahe ng mains U 1 tungkol sa kanya nominal na halaga U 1nom ay sinamahan hindi lamang ng mga pagbabago sa maximum at simula ng mga torque, kundi pati na rin ng mga pagbabago sa bilis ng rotor.
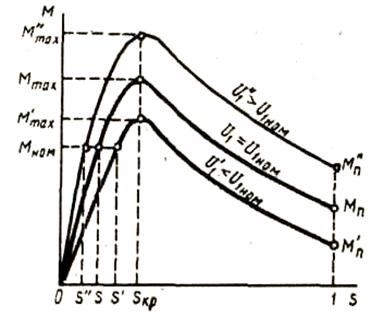 |
kanin. 3.12. Impluwensya ng boltahe sa uri ng mekanikal na katangian ng isang induction motor
Sa pagbaba ng boltahe ng mains, bumababa ang bilis ng rotor (slip increases). Boltahe U 1 nakakaimpluwensya sa pagtatalaga ng maximum na sandali M tah, pati na rin ang overload capacity ng engine. Kaya kung ang boltahe U 1 nabawasan ng 30%, i.e. U 1 \u003d 0.7U nom, pagkatapos ay ang maximum na metalikang kuwintas ng induction motor ay higit sa kalahati:
M¢ max = 0.7 2 M max = 0.49M max.
Kung magkano ang pagbaba ng overload na kapasidad ng motor Kung, halimbawa, sa rate na boltahe ng network, ang overload na kapasidad  , pagkatapos kapag ang boltahe ay bumaba ng 30%, ang overload na kapasidad ng motor
, pagkatapos kapag ang boltahe ay bumaba ng 30%, ang overload na kapasidad ng motor  , ibig sabihin. | hindi kayang dalhin ng makina kahit ang rated load.
, ibig sabihin. | hindi kayang dalhin ng makina kahit ang rated load.
Tulad ng sumusunod mula sa (3.44), ang halaga ng maximum na metalikang kuwintas ng motor ay hindi nakasalalay sa aktibong paglaban ng rotor r¢ 2 . Tulad ng para sa kritikal na slip s cr, pagkatapos, tulad ng makikita mula sa (3.43), ito ay proporsyonal sa paglaban r¢ 2 . Kaya, kung sa isang asynchronous na motor ang aktibong paglaban ng rotor circuit ay unti-unting tumaas, kung gayon ang halaga ng maximum na metalikang kuwintas ay mananatiling hindi nagbabago, at ang kritikal na slip ay tataas (Larawan 3.13). Sa kasong ito, ang panimulang metalikang kuwintas ng makina M P tumataas kasabay ng pagtaas ng resistensya r¢ 2 hanggang sa ilang halaga. Sa figure, ito ay tumutugma sa paglaban r¢ 2 III, kung saan ang panimulang torque ay katumbas ng maximum. Sa karagdagang pagtaas ng paglaban r¢ 2 nababawasan ang panimulang torque.
 |
kanin. 3.13. Ang impluwensya ng aktibong paglaban ng rotor winding sa mga mekanikal na katangian ng isang asynchronous na motor.
Pagsusuri ng graph M = f(s), ipinapakita sa fig. Ipinapakita rin ng 3.13 na ang mga pagbabago sa resistensya ng rotor r¢ 2 sinamahan ng mga pagbabago sa bilis ng pag-ikot: na may pagtaas r¢ 2 na may pare-parehong sandali ng pagkarga M st tumataas ang slip, ibig sabihin, bumababa ang bilis (mga puntos 1, 2, 3 at 4).
Ang impluwensya ng aktibong paglaban ng rotor winding sa hugis ng mga mekanikal na katangian ng mga asynchronous na motor ay ginagamit sa disenyo ng mga motor. Halimbawa, ang mga pangkalahatang layunin na asynchronous na motor ay dapat magkaroon ng isang "mahirap" na katangian ng bilis (tingnan ang Fig. 3.11), ibig sabihin, gumana sa isang maliit na nominal slip. Ito ay nakakamit sa pamamagitan ng paggamit ng rotor winding na may mababang aktibong resistensya sa motor. r¢ 2. Sa kasong ito, ang motor ay may mas mataas na kahusayan dahil sa pagbawas ng mga pagkalugi ng kuryente sa rotor winding ( R e2 \u003d m 1 I¢ 2 2 r¢ 2). Napiling halaga r¢ 2 dapat magbigay sa motor ng kinakailangang panimulang metalikang kuwintas.
Kung kinakailangan upang makakuha ng isang motor na may mas mataas na halaga ng panimulang metalikang kuwintas, ang aktibong paglaban ng rotor winding ay nadagdagan. Ngunit sa parehong oras, ang isang makina na may malaking halaga ng nominal slip ay nakuha, at, dahil dito, na may mas mababang kahusayan.
Itinuturing na mga dependency M \u003d f (U 1) at M = f(r 2") ay din ng malaking praktikal na kahalagahan kapag isinasaalang-alang ang mga isyu ng pagsisimula at pagkontrol sa bilis ng pag-ikot ng mga asynchronous na motor.
Mga katangian ng pagganap ng asynchronous na motor
Ang mga katangian ng pagganap ng isang induction motor (Larawan 3.14) ay grapikong ipinahayag na mga dependency ng bilis ng pag-ikot n 2, kahusayan h, kapaki-pakinabang na sandali (torque sa baras) M 2, power factor cosφ 1, at kasalukuyang stator ako 1, mula sa kapaki-pakinabang na kapangyarihan R 2 sa U 1= const at f1= const.

kanin. 3.14. Mga katangian ng pagganap ng asynchronous na motor
katangian ng bilisn 2 \u003d f (P 2).
Bilis ng rotor ng induction motor
n 2 \u003d n 1 (1-s).
Dumudulas sa (3.33)
ibig sabihin, ang slip ng motor, at samakatuwid ang bilis nito, ay tinutukoy ng ratio ng mga pagkalugi ng kuryente sa rotor sa electromagnetic power R em.
Ang pagpapabaya sa mga pagkalugi ng kuryente sa rotor sa idle mode, maaari naming gawin R e2= 0, at samakatuwid s0 ≈ 0 at n 20 ≈ n 1,. Habang tumataas ang load sa motor shaft, lumalaki ang ratio (8.1), na umaabot sa mga value na 0.01 ÷ 0.08 sa rated load. Alinsunod sa pag-asa na ito n 2 = f(P 2) ay isang kurba na bahagyang nakahilig sa x-axis.
Gayunpaman, sa isang pagtaas sa aktibong paglaban ng rotor r¢ 2 tumataas ang slope ng curve na ito. Sa kasong ito, nagbabago ang bilis ng pag-ikot p 2 sa panahon ng pagbabagu-bago ng pagkarga R 2 pagtaas. Ito ay ipinaliwanag sa pamamagitan ng ang katunayan na sa pagtaas r¢ 2 mga pagkalugi ng kuryente sa pagtaas ng rotor [tingnan. (3.31)].
Pagganap ng mekanikal M 2 = f(P 2)
Ang pagtitiwala ng kapaki-pakinabang na sandali sa baras ng motor M 2 mula sa netong kapangyarihan R 2 ay tinukoy ng expression
 (3.53)
(3.53)
saan R 2— kapaki-pakinabang na kapangyarihan, W;
ay ang angular frequency ng pag-ikot ng rotor.
Ito ay sumusunod mula sa pananalitang ito na kung n 2= const, pagkatapos ay ang graph M 2 \u003d f (P 2) ay isang tuwid na linya. Ngunit sa isang asynchronous na motor na may pagtaas ng pagkarga R 2 bumababa ang bilis ng rotor, at samakatuwid ay ang kapaki-pakinabang na sandali sa baras M 2 sa pagtaas ng load, medyo mas mabilis itong tumataas kaysa sa load, at samakatuwid, ang graph M 2 = f(P2) may curvilinear na anyo.
Dependence cosφ 1 = f(P 2)
Dahil sa ang katunayan na ang stator kasalukuyang ako 1 ay may reaktibo (inductive) na bahagi na kinakailangan upang lumikha ng isang magnetic field sa stator, ang power factor ng mga asynchronous na motor ay mas mababa sa isa.
Ang pinakamababang halaga ng power factor ay tumutugma sa XX mode. Ito ay ipinaliwanag sa pamamagitan ng katotohanan na ang kasalukuyang XX ako 0 sa ilalim ng anumang pagkarga ay nananatiling halos hindi nagbabago. Samakatuwid, sa mababang pag-load ng motor, ang kasalukuyang stator ay maliit at higit na reaktibo ( Ako 1 ≈ ako 0). Bilang resulta, ang phase shift ng kasalukuyang stator na may kaugnayan sa boltahe ay makabuluhan ( φ ≈ φ 0 ), bahagyang mas mababa sa 90° (Larawan 3.15).
Ang power factor ng mga asynchronous na motor sa XX mode ay karaniwang hindi lalampas sa 0.2. Sa pagtaas ng pagkarga sa baras ng motor, ang aktibong sangkap ng kasalukuyang pagtaas ako 1 at ang power factor ay tumataas, na umaabot sa pinakamataas na halaga (0.80 ÷ 0.90) sa isang load na malapit sa nominal.
 |
Fig.3.15. Vector diagram ng isang induction motor sa ilalim ng magaan na pagkarga
Ang karagdagang pagtaas sa pagkarga ay sinamahan ng pagbaba cosφ 1, na ipinaliwanag sa pamamagitan ng pagtaas ng inductive resistance ng rotor ( x 2s) sa pamamagitan ng pagtaas ng slip, at samakatuwid ang dalas ng kasalukuyang sa rotor. Upang mapabuti ang power factor ng mga asynchronous na motor, napakahalaga na ang motor ay palaging tumatakbo, o hindi bababa sa isang makabuluhang bahagi ng oras, na may isang load na malapit sa rated load.
Ito ay masisiguro lamang kung tamang pagpili lakas ng makina. Kung ang engine ay tumatakbo underloaded para sa isang makabuluhang bahagi ng oras, pagkatapos ay upang madagdagan cosφ 1 angkop na inilapat na boltahe sa motor U 1 bumaba.
Halimbawa, sa mga motor na tumatakbo na may koneksyon sa delta ng stator winding, ito ay maaaring gawin sa pamamagitan ng muling pagkonekta sa stator windings sa isang bituin, na magdudulot ng pagbaba sa boltahe ng phase sa oras. Sa kasong ito, ang stator magnetic flux, at dahil dito, ang magnetizing current, ay bumababa ng halos isang kadahilanan. Bilang karagdagan, ang aktibong sangkap ng kasalukuyang stator ay medyo tumataas. Ang lahat ng ito ay nag-aambag sa isang pagtaas sa power factor ng engine.
Sa fig. Ang 3.16 ay nagpapakita ng mga graph ng dependency cosφ 1 asynchronous motor mula sa load kapag kumokonekta sa stator windings na may isang bituin (curve 1 ) at isang tatsulok (curve 2).
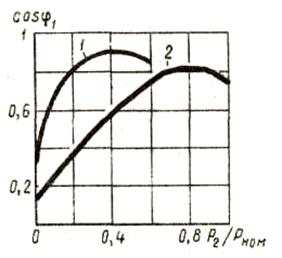
kanin. 3.16. Pagkagumon cosφ 1 mula sa pag-load kapag kumokonekta sa stator winding na may isang bituin (1) at isang delta (2).
Mga tanong para sa pagsusuri sa sarili
1. Ipaliwanag ang prinsipyo ng pagpapatakbo ng isang asynchronous na makina.
2. Ilarawan ang mga mode ng pagpapatakbo ng isang asynchronous na makina.
3. Ano ang tinatawag na sliding ng isang asynchronous machine?
4. Isulat ang mga equation ng boltahe para sa isang induction motor?
5. Isulat ang mga equation ng MMF at mga alon ng induction motor.
6. Iguhit ang katumbas na mga circuit ng isang induction motor.
7. Gumuhit ng vector diagram ng isang induction motor.
8. Anong mga pagkalugi ang umiiral sa isang asynchronous na motor? Gumuhit ng diagram ng enerhiya para sa isang induction motor.
9. Isulat ang formula para sa electromagnetic torque ng isang induction motor.
10. Gumuhit ng graph ng mekanikal na katangian ng isang induction motor.
11. Paano nagbabago ang mga mekanikal na katangian ng isang asynchronous na motor depende sa pagbabago sa boltahe ng mains at ang aktibong resistensya ng rotor?
12. Iguhit ang mga katangian ng pagpapatakbo ng isang induction motor.
Mga katangian ng pagganap ng asynchronous na motor
TRABAHO SA ELECTRICAL ENGINEERING
"Mga katangian ng pagganap ng asynchronous na motor"
Panimula
Ang asynchronous electric machine ay isang alternating current electric machine kung saan ang rotor speed ay hindi katumbas ng stator magnetic field speed at depende sa load. Ito ay pangunahing ginagamit bilang isang makina at bilang isang generator. Ang stator ay may mga grooves kung saan inilalagay ang single- o multi-phase (karaniwan ay tatlong-phase) winding, na konektado sa AC mains. Ang paikot-ikot na ito ay idinisenyo upang lumikha ng isang gumagalaw na magnetic field, umiikot na pabilog - para sa tatlong-phase na makina at pulsating o umiikot na elliptical - para sa mga single-phase na makina. Ang rotor ay isang umiikot na bahagi ng isang de-koryenteng makina, na idinisenyo din upang lumikha ng isang magnetic field, na, na nakikipag-ugnayan sa stator field, ay humahantong sa paglikha ng isang electromagnetic torque na tumutukoy sa direksyon ng conversion ng enerhiya. Para sa mga generator, ang sandaling ito ay isang likas na pagpepreno, na sumasalungat sa metalikang kuwintas ng prime mover, na nagtatakda ng rotor sa paggalaw. Sa mga makina, sa kabaligtaran, ang sandaling ito ay nagmamaneho, na nagtagumpay sa paglaban ng mekanismo na hinimok ng rotor.
Ang asynchronous generator ay isang asynchronous na de-koryenteng makina na tumatakbo sa generator mode. Isang pantulong na mapagkukunan ng electric current na may mababang kapangyarihan at isang braking device (sa isang electric drive).
Ang asynchronous electric motor ay isang asynchronous electric machine na tumatakbo sa motor mode. Ang pinakakaraniwang three-phase asynchronous electric motor (naimbento noong 1889 ni MO Dolivo-Dobrovolsky). Ang mga asynchronous na motor ay medyo simple sa disenyo at maaasahan sa pagpapatakbo, ngunit may limitadong saklaw ng bilis at mababang power factor sa mababang load. Power mula sa mga fraction ng W hanggang sampu ng MW.
1. Asynchronous na motor
1.1 Dalas ng pag-ikot ng magnetic field at rotor
Hayaan n1 ay ang dalas ng pag-ikot ng magnetic field. Ang isang multi-phase AC system ay lumilikha ng umiikot na magnetic field, ang bilis ng pag-ikot kung saan bawat minuto ay n1=60f1/p, kung saan ang f1 ay ang dalas ng kasalukuyang, p ay ang bilang ng mga pares ng poste na nabuo ng bawat yugto ng stator winding. .
n2- dalas ng pag-ikot ng rotor. Kung ang rotor ay umiikot sa isang frequency hindi katumbas ng dalas pag-ikot ng magnetic field (n2≠n1), kung gayon ang dalas na ito ay tinatawag na asynchronous. Sa isang asynchronous na motor, ang daloy ng trabaho ay maaari lamang tumakbo sa isang asynchronous frequency.
Sa panahon ng operasyon, ang bilis ng rotor ay palaging mas mababa kaysa sa bilis ng field.
(n2< n1)
1.2 Ang prinsipyo ng pagpapatakbo ng isang asynchronous na motor
Sa mga asynchronous na motor, ang isang umiikot na magnetic field ay nilikha ng isang three-phase system kapag ito ay konektado sa isang alternating current network. Ang umiikot na magnetic field ng stator ay tumatawid sa mga conductor ng rotor winding at nag-uudyok ng emf sa kanila. Kung ang rotor winding ay sarado sa anumang pagtutol o short-circuited, pagkatapos ay sa ilalim ng pagkilos ng sapilitan emf. kasalukuyang mga pass. Bilang resulta ng pakikipag-ugnayan ng kasalukuyang sa rotor winding na may umiikot magnetic field ang stator winding ay lumilikha ng isang metalikang kuwintas, sa ilalim ng impluwensya kung saan ang rotor ay nagsisimulang umikot sa direksyon ng pag-ikot ng magnetic field. Upang baguhin ang direksyon ng pag-ikot ng rotor, kinakailangan na magpalit ng alinman sa dalawa sa tatlong mga wire na kumukonekta sa stator winding sa network na may paggalang sa mga terminal ng network.
1.3 Ang aparato ng isang asynchronous na motor
Ang stator core ay kinuha mula sa steel plates, 0.35 o 0.5 mm ang kapal. Ang mga plato ay naselyohang may mga grooves at naayos sa frame ng engine. Ang kama ay naka-install sa pundasyon. Ang mga konduktor ng paikot-ikot nito ay inilalagay sa mga longitudinal grooves ng stator, na magkakaugnay upang ang isang three-phase system ay nabuo. Upang ikonekta ang mga windings ng stator sa isang three-phase network, maaari silang konektado sa isang bituin o isang delta. Ginagawa nitong posible na i-on ang motor sa isang network na may iba't ibang mga boltahe. Para sa mas mababang mga boltahe (220/127 V), ang stator winding ay konektado sa isang tatsulok, para sa mas mataas na boltahe (380/220 V) - sa isang bituin. Ang rotor core ay gawa rin sa mga plate na bakal na may kapal na 0.5 mm. Ang mga plato ay naselyohang may mga uka at pinagsama sa mga pakete na naka-mount sa baras ng makina. Ang isang silindro na may mga longitudinal grooves ay nabuo mula sa mga pakete, kung saan inilalagay ang mga conductor ng rotor winding. Depende sa uri ng rotor winding, ang mga asynchronous na makina ay maaaring phase at squirrel-cage rotor. Hindi maaaring isama ang paglaban sa isang short-circuited winding. Sa phase winding, ang mga conductor ay magkakaugnay, na bumubuo ng isang three-phase system. paikot-ikot tatlong yugto konektado ng isang bituin. Ang rotor winding ay maaaring short-circuited o short-circuited. Ang mga motor na may rotor ng squirrel-cage ay mas simple at mas mura, ngunit ang mga motor na may rotor ng sugat ay may mas mahusay na pagsisimula at pag-regulate ng mga katangian (ginagamit ang mga ito sa mataas na kapangyarihan). Ang kapangyarihan ng mga asynchronous na motor ay mula sa ilang sampu-sampung watts hanggang 15,000 kW sa isang stator winding voltage na hanggang 6 kV. Ang kawalan ng mga asynchronous na motor ay ang mababang power factor.
1.4 Pagpapatakbo ng isang asynchronous na motor sa ilalim ng pagkarga
n1 ay ang dalas ng pag-ikot ng stator magnetic field. n2- dalas ng pag-ikot ng rotor.
n1 >n2
Ang stator magnetic field ay umiikot sa parehong direksyon tulad ng rotor at dumudulas na may kaugnayan sa rotor na may dalas ns= n1 – n2
Ang lag ng rotor mula sa umiikot na magnetic field ng stator ay nailalarawan sa pamamagitan ng slip S= ns / n1, => S = (n1 - n2) / n1
Kung ang rotor ay nakatigil, kung gayon n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Kung ang rotor ay umiikot nang sabay-sabay sa magnetic field, kung gayon ang slip S= 0.
Sa idle, iyon ay, kapag walang load sa motor shaft, ang slip ay bale-wala at maaaring kunin katumbas ng 0. Ang load sa rotor shaft ay maaaring, halimbawa, isang lathe cutter. Lumilikha ito ng braking torque. Kung ang torque at braking torque ay pantay, ang motor ay tatakbo nang matatag. Kung ang pagkarga sa baras ay tumaas, kung gayon ang braking torque ay magiging mas malaki kaysa sa metalikang kuwintas at ang bilis ng rotor n2 bumaba. Ayon sa formula S =(n1 - n2) / n1 tataas ang slip. Dahil ang magnetic field ng stator ay dumudulas na may kaugnayan sa rotor na may dalas ns= n1 – n2, pagkatapos ay tatawid ito sa mga rotor conductor nang mas madalas, ang kasalukuyang at ang metalikang kuwintas ng motor ay tataas sa kanila, na malapit nang maging katumbas ng braking torque. Kapag bumababa ang load, ang braking torque ay nagiging mas mababa kaysa sa torque, tumataas n2 at bumababa S. Bumababa ang EMF at ang rotor current at ang torque ay muling katumbas ng preno. Ang magnetic flux sa air gap ng makina ay nananatiling humigit-kumulang pare-pareho para sa anumang pagbabago sa pagkarga.
2. Mga katangian ng pagganap ng asynchronous na motor
Ang pagganap ng isang induction motor ay nakasalalay
S - madulas
n2 - bilis ng rotor
M - nabuo sandali
I1 kasalukuyang pagkonsumo
P1 power input
COSφ power factor
Mula sa kapaki-pakinabang na kapangyarihan P2 sa baras ng makina.
Ang mga katangiang ito ay tinanggal sa ilalim ng natural na mga kondisyon. Ang kasalukuyang frequency f1 at ang boltahe U1 ay nananatiling pare-pareho. Ang load lang sa motor shaft ang nagbabago.
Habang tumataas ang load sa motor shaft, tumataas ang S. Kapag ang makina ay idling n2≈n1, at S≈0. Sa rated load, ang slip ay karaniwang 3 hanggang 5%.
Sa pagtaas ng load sa motor shaft, bumababa ang rotational speed n2. Gayunpaman, ang pagbabago sa bilis sa pagtaas ng pagkarga mula 0 hanggang nominal ay napakaliit at hindi lalampas sa 5%. Samakatuwid, ang katangian ng bilis ng isang induction motor ay matibay. Ang kurba ay may napakaliit na slope sa pahalang na axis.
Torque M, na binuo ng makina, ay balanse ng braking torque sa baras Mt at sandali М0, pagpunta sa pagtagumpayan mekanikal pagkalugi, iyon ay M \u003d Mt + M0 \u003d P2 /Ω2+ М0, saan R2– kapaki-pakinabang na lakas ng makina , Ω 2 - angular velocity ng rotor. Sa idle M= M0. Sa pagtaas ng pagkarga, tumataas din ang metalikang kuwintas, at dahil sa isang bahagyang pagbaba sa bilis ng rotor, ang pagtaas ng metalikang kuwintas ay nangyayari nang mas mabilis kaysa sa kapaki-pakinabang na kapangyarihan sa baras.
Ang kasalukuyang I1 na natupok ng motor mula sa network ay nag-iiba nang hindi pantay sa pagtaas ng load sa motor shaft. Sa idle, maliit ang COSφ power factor. At ang kasalukuyang ay may malaking reaktibong bahagi. Sa mababang load sa motor shaft, ang aktibong bahagi ng kasalukuyang stator ay mas mababa kaysa sa reaktibong bahagi, kaya ang aktibong bahagi ng kasalukuyang ay may maliit na epekto sa kasalukuyang I1. Sa mataas na pagkarga, ang aktibong bahagi ng kasalukuyang stator ay nagiging mas malaki kaysa sa reaktibo, at ang pagbabago sa pagkarga ay nagdudulot ng makabuluhang pagbabago sa kasalukuyang I1.
Ang graphical na pag-asa ng kapangyarihan na natupok ng motor P1 ay inilalarawan bilang isang halos tuwid na linya, bahagyang lumilihis paitaas sa matataas na pagkarga, na ipinaliwanag sa pamamagitan ng pagtaas ng mga pagkalugi sa stator at rotor windings na may pagtaas ng load.
Ang dependence ng COSφ-power factor sa load sa motor shaft ay ang mga sumusunod. Sa idle, ang СOSφ ay maliit, mga 0.2. Dahil ang aktibong bahagi ng kasalukuyang stator, dahil sa pagkawala ng kuryente sa makina, ay maliit kumpara sa reaktibong bahagi ng kasalukuyang ito, na lumilikha ng magnetic flux. Sa pagtaas ng pagkarga sa baras, ang СOSφ ay tumataas, na umaabot sa pinakamataas na halaga ng 0.8–0.9, bilang resulta ng pagtaas sa aktibong bahagi ng kasalukuyang stator. Sa napakataas na pag-load, mayroong isang bahagyang pagbaba sa COSφ, dahil bilang isang resulta ng isang makabuluhang pagtaas sa slip at kasalukuyang dalas sa rotor, ang reactance ng rotor winding ay tumataas.
Ang kurba ng kahusayan η ay may parehong anyo tulad ng sa anumang makina o transpormer. Sa idle, kahusayan = 0. Sa pagtaas ng pagkarga sa baras ng motor, ang kahusayan ay tumataas nang husto, at pagkatapos ay bumababa. Ang kahusayan ay umabot sa pinakamataas na halaga nito sa naturang pagkarga, kapag ang pagkawala ng kapangyarihan sa bakal at mekanikal na pagkalugi, na hindi nakasalalay sa pagkarga, ay katumbas ng mga pagkalugi ng kuryente sa stator at rotor windings, na nakasalalay sa pagkarga.
Mga katulad na abstract:
Mga uri ng asynchronous executive micromotors: na may guwang na non-magnetic at magnetic rotor; na may short-circuited winding na parang squirrel wheel. Scheme ng isang half-closed groove ng magnetic circuit. Paglikha ng umiikot na magnetic field sa pamamagitan ng two-phase stator.
Ang aparato ng isang three-phase asynchronous machine, ang mga pangunahing elemento nito, mga mode at prinsipyo ng pagpapatakbo, ang kasaysayan ng paglikha at aplikasyon sa kasalukuyang yugto. Ang pamamaraan at kundisyon para sa pagkuha ng umiikot na magnetic field. Ang pagtitiwala ng electromagnetic torque sa slip.
Pagpapasiya ng kabuuang sandali ng pagkawalang-kilos ng gearbox, winch, at load na nabawasan sa motor shaft. Ang pagkalkula ng sandali ng paglaban ay nabawasan sa baras sa panahon ng pag-akyat, pagbaba. Ang halaga ng kapangyarihan sa baras ng gearbox. Ang dahilan para sa pagkakaiba sa kapangyarihan kapag angat at pagbaba ng load.
Pagkalkula at disenyo ng motor, pagpili ng mga pangunahing sukat, pagkalkula ng stator winding. Pagkalkula ng mga sukat ng zone ng ngipin ng stator at ang pagpili ng puwang ng hangin. Pagmomodelo ng engine sa kapaligiran ng MatLab Power System Blockset, pati na rin sa mga parameter ng nominal na mode.
Pangunahing at backup na proteksyon ng turbogenerator.
Device at conditional na imahe ng kasabay tatlong-phase na makina. Ang lokasyon ng mga pole ng magnetic field ng stator at rotor. Pag-asa ng electromagnetic torque ng isang kasabay na makina sa anggulo. ang scheme ng pagsasama ng synchronous motor sa dynamic na pagpepreno.
Pangkalahatang Impormasyon tungkol sa mga asynchronous na makina (two-winding mga de-koryenteng makina alternating current). Ang disenyo ng mga aktibong bahagi, mga bearing assemblies, ang input device ng isang asynchronous micromotor 4AA50V2, ang prinsipyo ng operasyon nito, mga lugar ng aplikasyon at kahalagahan.
Pagdidisenyo ng three-phase asynchronous electric motor na may rotor ng squirrel-cage. Pagpili ng motor analogue, mga sukat, pagsasaayos, magnetic circuit na materyal. Pagpapasiya ng stator winding coefficient, mekanikal na pagkalkula ng baras at rolling bearings.
Pagkalkula ng isang asynchronous na motor na may rotor ng squirrel-cage. Pagpili ng mga pangunahing sukat. Pagkalkula ng mga sukat ng zone ng ngipin ng stator at air gap, rotor, magnetizing current. Mga parameter ng operating mode. Pagkalkula ng mga pagkalugi, pagpapatakbo at panimulang katangian.
Pangkalahatang impormasyon tungkol sa mga asynchronous na makina. Pangkalahatang impormasyon tungkol sa mga mode ng pagpapatakbo ng isang asynchronous na motor. Analytical at graphical na kahulugan ng mga mode ng operasyon ng isang asynchronous reconstruction machine.
Mga tampok ng pagbuo ng isang asynchronous electric motor na may squirrel-cage rotor type 4А160S4У3 batay sa isang pangkalahatang makina. Pagkalkula ng modelo ng matematika ng isang asynchronous na motor sa anyo ng Cauchy 5. Kasapatan ng modelo ng direktang pagsisimula ng isang asynchronous na motor.
Paraan para sa pagkalkula ng magnetic circuit sabaysabay na generator, ang pagpili ng mga sukat at pagsasaayos nito, ang pagtatayo ng mga katangian ng magnetization ng makina. Pagpapasiya ng mga parameter ng paikot-ikot, pagganap ng mga kalkulasyon ng thermal at bentilasyon, pagguhit ng pagpupulong ng generator.
Hindi matanggap ng maramihan asynchronous na simula kasabay na motor, na humahantong sa isang makabuluhang pagbaba ng boltahe sa sistema ng supply, sa paglitaw ng mga makabuluhang dynamic na pwersa sa mga frontal na bahagi ng stator winding at thermal aging ng pagkakabukod.
Konstruksyon ng load diagram ng actuator. Ang pagpili ng mga elemento ng power circuit. Pagkalkula ng mga mekanikal na katangian. Pagtatasa ng pangangailangan para sa mabilis na feedback. Pagpapasiya ng average na kahusayan ng system. Lumilipas na mga proseso sa drive.
Pangkalahatang impormasyon tungkol sa mga device awtomatikong regulasyon paggulo ng mga kasabay na makina. Mga salik na nakakaapekto sa boltahe at power supply circuit. Kasalukuyang Compounding Device: Mga Kinakailangang Pagbabago sa Mga Katangian ng Compounding Machine.
Magnetic circuit ng motor. Mga sukat, pagsasaayos, materyal. Stator core, rotor at piraso ng poste. Pagkalkula ng magnetic circuit. Air gap, ngipin at stator pabalik. Aktibo at inductive reactance stator windings para sa steady state.
TRABAHO SA ELECTRICAL ENGINEERING
"Mga katangian ng pagganap ng asynchronous na motor"
Panimula
asynchronous de-kuryenteng makina- ito ay isang AC electric machine, kung saan ang rotor speed ay hindi katumbas ng bilis ng stator magnetic field at depende sa load. Ito ay pangunahing ginagamit bilang isang makina at bilang isang generator. Ang stator ay may mga grooves kung saan inilalagay ang single- o multi-phase (karaniwan ay tatlong-phase) winding, na konektado sa AC mains. Ang paikot-ikot na ito ay idinisenyo upang lumikha ng isang gumagalaw na magnetic field, umiikot na pabilog - para sa tatlong-phase na makina at pulsating o umiikot na elliptical - para sa mga single-phase na makina. Ang rotor ay isang umiikot na bahagi ng isang de-koryenteng makina, na idinisenyo din upang lumikha ng isang magnetic field, na, na nakikipag-ugnayan sa stator field, ay humahantong sa paglikha ng isang electromagnetic torque na tumutukoy sa direksyon ng conversion ng enerhiya. Para sa mga generator, ang sandaling ito ay isang likas na pagpepreno, na sumasalungat sa metalikang kuwintas ng prime mover, na nagtatakda ng rotor sa paggalaw. Sa mga makina, sa kabaligtaran, ang sandaling ito ay nagmamaneho, na nagtagumpay sa paglaban ng mekanismo na hinimok ng rotor.
Ang asynchronous generator ay isang asynchronous na de-koryenteng makina na tumatakbo sa generator mode. Pantulong na mapagkukunan agos ng kuryente mababang kapangyarihan at braking device (sa electric drive).
Ang asynchronous electric motor ay isang asynchronous electric machine na tumatakbo sa motor mode. Ang pinakakaraniwang three-phase asynchronous electric motor (naimbento noong 1889 ni MO Dolivo-Dobrovolsky). Mga asynchronous na motor ang mga ito ay nailalarawan sa pamamagitan ng kamag-anak na pagiging simple ng disenyo at pagiging maaasahan sa operasyon, gayunpaman, mayroon silang isang limitadong saklaw ng bilis at mababang power factor sa mga magaan na pagkarga. Power mula sa mga fraction ng W hanggang sampu ng MW.
1. Asynchronous na motor
1.1 Dalas ng pag-ikot ng magnetic field at rotor
Hayaan n 1 ay ang dalas ng pag-ikot ng magnetic field. Ang isang multi-phase AC system ay lumilikha ng umiikot na magnetic field, ang bilis ng pag-ikot kung saan bawat minuto ay n1=60f1/p, kung saan ang f1 ay ang dalas ng kasalukuyang, p ay ang bilang ng mga pares ng poste na nabuo ng bawat yugto ng stator winding. .
n 2 - dalas ng pag-ikot ng rotor. Kung ang rotor ay umiikot na may dalas na hindi katumbas ng dalas ng pag-ikot ng magnetic field (n2≠n1), kung gayon ang dalas na ito ay tinatawag na asynchronous. Sa isang asynchronous na motor, ang daloy ng trabaho ay maaari lamang tumakbo sa isang asynchronous frequency.
Sa panahon ng operasyon, ang bilis ng rotor ay palaging mas mababa kaysa sa bilis ng field.
( n 2< n 1)
1.2 Ang prinsipyo ng pagpapatakbo ng isang asynchronous na motor
Sa mga asynchronous na motor, ang isang umiikot na magnetic field ay nilikha ng isang three-phase system kapag ito ay konektado sa isang alternating current network. Ang umiikot na magnetic field ng stator ay tumatawid sa mga conductor ng rotor winding at nag-uudyok ng emf sa kanila. Kung ang rotor winding ay sarado sa anumang pagtutol o short-circuited, pagkatapos ay sa ilalim ng pagkilos ng sapilitan emf. kasalukuyang mga pass. Bilang resulta ng pakikipag-ugnayan ng kasalukuyang sa rotor winding na may umiikot na magnetic field ng stator winding, ang isang metalikang kuwintas ay nilikha, sa ilalim ng impluwensya kung saan ang rotor ay nagsisimulang umikot sa direksyon ng pag-ikot ng magnetic field. Upang baguhin ang direksyon ng pag-ikot ng rotor, kinakailangan na magpalit ng alinman sa dalawa sa tatlong mga wire na kumukonekta sa stator winding sa network na may paggalang sa mga terminal ng network.
1.3 Ang aparato ng isang asynchronous na motor
Ang stator core ay kinuha mula sa steel plates, 0.35 o 0.5 mm ang kapal. Ang mga plato ay naselyohang may mga grooves at naayos sa frame ng engine. Ang kama ay naka-install sa pundasyon. Ang mga konduktor ng paikot-ikot nito ay inilalagay sa mga longitudinal grooves ng stator, na magkakaugnay upang ang isang three-phase system ay nabuo. Upang ikonekta ang stator windings sa tatlong-phase na network maaari silang maging star o delta na konektado. Ginagawa nitong posible na i-on ang motor sa isang network na may iba't ibang mga boltahe. Para sa mas mababang mga boltahe (220/127 V), ang stator winding ay konektado sa isang tatsulok, para sa mas mataas na boltahe (380/220 V) - sa isang bituin. Ang rotor core ay gawa rin sa mga plate na bakal na may kapal na 0.5 mm. Ang mga plato ay naselyohang may mga uka at pinagsama sa mga pakete na naka-mount sa baras ng makina. Ang isang silindro na may mga longitudinal grooves ay nabuo mula sa mga pakete, kung saan inilalagay ang mga conductor ng rotor winding. Depende sa uri ng rotor winding mga asynchronous na makina maaaring kasama phase at short-circuited rotor. Hindi maaaring isama ang paglaban sa isang short-circuited winding. Sa phase winding, ang mga conductor ay magkakaugnay, na bumubuo ng isang three-phase system. Ang mga windings ng tatlong phase ay konektado sa pamamagitan ng isang bituin. Ang rotor winding ay maaaring short-circuited o short-circuited. Ang mga motor na may rotor ng squirrel-cage ay mas simple at mas mura, ngunit ang mga motor na may rotor ng sugat ay may mas mahusay na pagsisimula at pag-regulate ng mga katangian (ginagamit ang mga ito sa mataas na kapangyarihan). Ang kapangyarihan ng mga asynchronous na motor ay mula sa ilang sampu-sampung watts hanggang 15,000 kW sa isang stator winding voltage na hanggang 6 kV. Ang kawalan ng mga asynchronous na motor ay ang mababang power factor.
1.4 Pagpapatakbo ng isang asynchronous na motor sa ilalim ng pagkarga
n 1 ay ang dalas ng pag-ikot ng stator magnetic field. n 2 - dalas ng pag-ikot ng rotor.
n 1 > n 2
Ang stator magnetic field ay umiikot sa parehong direksyon tulad ng rotor at dumudulas na may kaugnayan sa rotor na may dalas n s = n 1 – n 2
Ang lag ng rotor mula sa umiikot na magnetic field ng stator ay nailalarawan sa pamamagitan ng slip S = n s / n 1, => S = ( n 1 – n 2) / n 1
Kung ang rotor ay nakatigil, kung gayon n 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1
Kung ang rotor ay umiikot nang sabay-sabay sa magnetic field, kung gayon ang slip S= 0.
Sa idle, iyon ay, sa kawalan ng load sa motor shaft, ang slip ay bale-wala at maaaring kunin na katumbas ng 0. Ang load sa rotor shaft ay maaaring, halimbawa, isang cutter makinang panlalik. Lumilikha ito ng braking torque. Kung ang torque at braking torque ay pantay, ang motor ay tatakbo nang matatag. Kung ang pagkarga sa baras ay tumaas, kung gayon ang braking torque ay magiging mas malaki kaysa sa metalikang kuwintas at ang bilis ng rotor n 2 bumaba. Ayon sa formula S = ( n 1 – n 2) / n 1 tataas ang slip. Dahil ang magnetic field ng stator ay dumudulas na may kaugnayan sa rotor na may dalas n s = n 1 – n 2, pagkatapos ay tatawid ito sa mga rotor conductor nang mas madalas, ang kasalukuyang at ang metalikang kuwintas ng motor ay tataas sa kanila, na malapit nang maging katumbas ng braking torque. Kapag bumababa ang load, ang braking torque ay nagiging mas mababa kaysa sa torque, tumataas n 2 at bumababa S . Bumababa ang EMF at ang rotor current at ang torque ay muling katumbas ng preno. Ang magnetic flux sa air gap ng makina ay nananatiling humigit-kumulang pare-pareho para sa anumang pagbabago sa pagkarga.
2. Mga katangian ng pagganap ng asynchronous na motor
Ang pagganap ng isang induction motor ay nakasalalay
S - madulas
n2 - bilis ng rotor
M - nabuo sandali
I1 kasalukuyang pagkonsumo
P1 power input
COSφ power factor
Mula sa kapaki-pakinabang na kapangyarihan P2 sa baras ng makina.
Ang mga katangiang ito ay tinanggal sa ilalim ng natural na mga kondisyon. Ang kasalukuyang frequency f1 at ang boltahe U1 ay nananatiling pare-pareho. Ang load lang sa motor shaft ang nagbabago.
Habang tumataas ang load sa motor shaft, tumataas ang S. Kapag ang makina ay idling n2≈n1, at S≈0. Sa rated load, ang slip ay karaniwang 3 hanggang 5%.
Sa pagtaas ng load sa motor shaft, bumababa ang rotational speed n2. Gayunpaman, ang pagbabago sa bilis sa pagtaas ng pagkarga mula 0 hanggang nominal ay napakaliit at hindi lalampas sa 5%. kaya lang, katangian ng bilis matigas ang induction motor. Ang kurba ay may napakaliit na slope sa pahalang na axis.
Torque M, na binuo ng makina, ay balanse ng braking torque sa baras Mt at sandali M 0 , pagpunta sa pagtagumpayan mekanikal pagkalugi, iyon ay M= Mt + M 0 =P 2 /Ω 2 + M 0 , saan R 2 – kapaki-pakinabang na lakas ng makina , Ω 2 - angular velocity ng rotor. Sa idle M=M 0. Sa pagtaas ng pagkarga, tumataas din ang metalikang kuwintas, at dahil sa isang bahagyang pagbaba sa bilis ng rotor, ang pagtaas ng metalikang kuwintas ay nangyayari nang mas mabilis kaysa sa kapaki-pakinabang na kapangyarihan sa baras.
Ang kasalukuyang I1 na natupok ng motor mula sa network ay nag-iiba nang hindi pantay sa pagtaas ng load sa motor shaft. Sa idle, maliit ang COSφ power factor. At ang kasalukuyang ay may malaking reaktibong bahagi. Sa mababang load sa motor shaft, ang aktibong bahagi ng kasalukuyang stator ay mas mababa kaysa sa reaktibong bahagi, kaya ang aktibong bahagi ng kasalukuyang ay may maliit na epekto sa kasalukuyang I1. Sa mataas na pagkarga, ang aktibong bahagi ng kasalukuyang stator ay nagiging mas malaki kaysa sa reaktibo, at ang pagbabago sa pagkarga ay nagdudulot ng makabuluhang pagbabago sa kasalukuyang I1.
Ang graphical na pag-asa ng kapangyarihan na natupok ng motor P1 ay inilalarawan bilang isang halos tuwid na linya, bahagyang lumilihis paitaas sa matataas na pagkarga, na ipinaliwanag sa pamamagitan ng pagtaas ng mga pagkalugi sa stator at rotor windings na may pagtaas ng load.
Ang dependence ng COSφ-power factor sa load sa motor shaft ay ang mga sumusunod. Sa idle, ang СOSφ ay maliit, mga 0.2. Dahil ang aktibong bahagi ng kasalukuyang stator, dahil sa pagkawala ng kuryente sa makina, ay maliit kumpara sa reaktibong bahagi ng kasalukuyang ito, na lumilikha ng magnetic flux. Sa pagtaas ng pagkarga sa baras, ang СOSφ ay tumataas, na umaabot sa pinakamataas na halaga ng 0.8–0.9, bilang resulta ng pagtaas sa aktibong bahagi ng kasalukuyang stator. Sa napakataas na pag-load, mayroong isang bahagyang pagbaba sa COSφ, dahil bilang isang resulta ng isang makabuluhang pagtaas sa slip at kasalukuyang dalas sa rotor, ang reactance ng rotor winding ay tumataas.
Ang kurba ng kahusayan η ay may parehong anyo tulad ng sa anumang makina o transpormer. Sa idle, kahusayan = 0. Sa pagtaas ng pagkarga sa baras ng motor, ang kahusayan ay tumataas nang husto, at pagkatapos ay bumababa. Pinakamalaking halaga Ang kahusayan ay naabot sa naturang pagkarga, kapag ang pagkawala ng kapangyarihan sa bakal at mekanikal na pagkalugi, na hindi nakasalalay sa pagkarga, ay katumbas ng mga pagkalugi ng kuryente sa stator at rotor windings, na nakasalalay sa pagkarga.
Electromagnetic na sandali
.
Kumpleto mekanikal na kapangyarihan makina
ay nilikha bilang isang resulta ng pag-ikot ng rotor na may angular na bilis ω 2 sa ilalim ng pagkilos ng sandali M em i.e.
P fur \u003d M em ω 2 (2.19)
Ang kapangyarihang ito ay maaaring matukoy mula sa katumbas na circuit bilang kuryente, na namumukod-tangi sa conditional load resistance R well ", na pinarami ng bilang ng mga stator phase:
P fur = m 1 (I 2 ") 2 R 2 " (1-s) / s (2.20)
Batay sa (2.19) at (2.20), isinasaalang-alang ang (2.8), maaari tayong sumulat
M em \u003d (m 1 (I 2 ") 2 R 2 " / s) / ω 1 (2.21)
Kapag kinakalkula ang sandali ayon sa formula (2.21), ang kasalukuyang ako 2" ay tinutukoy ng katumbas na circuit (Fig. 2.10) para sa kaukulang slip.
Ang formula (2.21) ay maaaring mabago sa pamamagitan ng pagpapalit dito ng expression para sa kasalukuyang ako 2", nakuha sa ilalim ng ilang mga pagpapalagay mula sa katumbas na circuit
M em \u003d (m 1 U 1 R 2 "/s) / ω 1 ((R 1 + CR 2 / s) 2 + (x 1 + Cx 2 ") 2) (2.22)
Coefficient C, na pumapasok sa formula (2.22), ay ang modulus kumplikadong koepisyent MULA SA
= 1 + (z 1 /z m) na lumilitaw sa panahon ng pagbabagong-anyo. Ang pagpapalagay ay isinasaalang-alang lamang ang modulus ng koepisyent MULA SA
, dahil ang argumento nito sa totoong mga makina ay napakaliit. Sa mga totoong makina (hindi kasama ang mga micromachine) MULA SA
= 1.03–1.08 at sa pagsusuri ng husay minsan kumukuha MULA SA
=
1.
Ang expression (2.21) ay maaari ding mabago sa pamamagitan ng pagpapahayag ng aktibong pagbagsak ng boltahe sa rotor I 2 "R 2" / s sa pamamagitan ng EMF batay sa mga formula (2.15) at (2.16)
I 2 "R 2" /s \u003d E 2 "cos ψ 2 (2.23)
Ang pagpapalit (2.23) sa (2.21) at pagsasagawa ng mga pagbabago, na isinasaalang-alang ang (2.18) at (2.12), nakukuha natin
M em \u003d k F m I 2 "cos ψ 2 (2.24)
saan k- nakabubuo na koepisyent.
Tulad ng makikita mula sa (2.24), ang electromagnetic moment ay direktang proporsyonal sa pangunahing magnetic flux F m at ang aktibong bahagi ng kasalukuyang rotor ako 2" cos ψ 2.
Ang mga formula ng torque (2.21), (2.22) at (2.24) ay nakuha para sa motor mode, ngunit may bisa rin sila para sa iba pang mga mode, na isinasaalang-alang ang sign at saklaw ng mga halaga ng slip s. Ang pag-asa ng electromagnetic torque sa slip ay graphically na ipinakita sa fig. 2.11 (solid na linya).
Ang ganitong uri ng katangian ay madaling ipaliwanag gamit ang mga formula (2.24), (2.15), at (2.16). Sa pagtaas ng slip, ang rotor kasalukuyang ako 2 patuloy na tumataas, ngunit nagiging mas pasaklaw - bumababa cos ψ 2 habang ang dalas ng mga alon sa rotor ay tumataas at, nang naaayon, ang inductive resistance nito. Bilang isang resulta, ang aktibong bahagi ng kasalukuyang rotor at, nang naaayon, ang electromagnetic torque ay unang tumaas at pagkatapos ay nagsisimulang bumaba.
Ang slip kung saan ang sandali ay umabot sa pinakamataas na halaga ng M max ay tinatawag na kritikal at tinutukoy ng scr. Upang matukoy ang scr, kinakailangan, gamit ang expression (2.22), upang kunin ang derivative dM em /ds at i-equate ito sa zero. Ang solusyon ng resultang equation ay may anyo
s cr \u003d ±C R 2 " / √ (R 1" + 2) (2.25)
Sa pagkuha sa unang pagtatantya C 1 ≈ 1 at R 1 ≈ 0, nakukuha namin
s cr = ±R 2" /(x 1+x2") (2.26)
Karamihan sa mga induction motor ay nangangailangan ng mataas na kahusayan. Samakatuwid, ang aktibong paglaban ng mga paikot-ikot, sa partikular na R 2, na tumutukoy sa antas ng mga pagkalugi ng kuryente sa rotor, ay malamang na maliit. Sa kasong ito, ang kritikal na slip ay nasa hanay .
Pinapalitan namin ang (2.25) sa (2.22) at makuha ang expression para sa maximum na sandali:
M max = ± m 1 U 1 2 /2 ω 1 C [± R 1 + √(R 1 2 +(x 1 + Cx 2) 2)] (2.27)
Ang "+" sign ay tumutukoy sa motor mode, "-" - sa generator mode.
Tulad ng nakikita mo, ang maximum na sandali ay proporsyonal sa parisukat supply ng boltahe, ay hindi nakasalalay sa aktibong paglaban ng rotor circuit R2 at nangyayari sa mas malaking slip, mas malaki ang aktibong resistensya ng rotor circuit (Fig. 2.11, dash-dotted line, R2B >R2A).
Pagsisimula ng metalikang kuwintas makina M p ay tinutukoy ng expression (2.22) para sa s=1. Ibig sabihin M p proporsyonal sa parisukat ng supply boltahe at tumataas sa pagtaas R2(tingnan ang Fig. 2.11), na umaabot sa maximum sa s cr =1.
Ang na-rate na slip snom, na tumutugma sa na-rate na torque Mnom, ay tumataas sa pagtaas ng R 2 . Ito ay sinamahan ng isang pagtaas sa mga pagkalugi ng kuryente sa rotor circuit at pagbaba sa kahusayan. Para sa mga asynchronous na motor na may mababang kritikal na slip, S nom = 0.02 - 0.06.
Equilibrium equation ng mga sandali sa motor shaft.
Ang electromagnetic moment na binuo ng engine ay nagtagumpay sa load moment M n na inilapat sa engine shaft at ang sariling moment of resistance ng engine M 0 (idling torque), na tinutukoy ng mekanikal at karagdagang pagkalugi sa engine. Tinutukoy ng resultang sandali ang halaga at senyales ng rotor acceleration:
dω / dt \u003d (M em - M 0 - M n) / J (2.28)
saan J- ang sandali ng pagkawalang-galaw ng mga umiikot na bahagi - ang rotor at ang pagkarga.
Ito ay isang differential equation ng paggalaw ng isang electric drive, na binubuo ng isang motor at isang load, na na-convert sa anyo
M em \u003d M 0 + M n + J (dω / dt) (2.29)
tinawag ang equation ng equilibrium ng mga sandali sa motor shaft.
Sa equation na ito:
M 0 + M n \u003d M st- static na sandali ng paglaban,
J(dω/dt)= M dyn ay ang dinamikong sandali ng paglaban.
Electromagnetic na sandali M eh minus sandali M0 tinatawag na kapaki-pakinabang o metalikang kuwintas sa baras at magpakilala M2. Mula sa mga equation (2.28) at (2.29) sumusunod na:
1) kung M eh = M st, pagkatapos dω/dt = 0, ω
= const i.e. ang makina ay gumagana sa isang steady state (static) mode, habang M2 = M n;
2) kung M eh> M st, pagkatapos ay ang angular velocity ng rotor ay tumataas, i.e. ang makina ay nagpapatakbo sa isang lumilipas (dynamic) mode;
3) kung M eh< M st, pagkatapos ay bumababa ang angular velocity ng rotor, i.e. tumatakbo ang makina sa transient mode.
AT pangkalahatang kaso Kapag pinagsama-sama ang equation para sa equilibrium ng mga sandali, dapat isaalang-alang ng isa ang mga palatandaan ng mga sandali, na tinutukoy ng direksyon ng pagkilos ng mga sandali na may paggalang sa positibong direksyon ng pag-ikot. Kung ang motor ay bumubuo ng isang electromagnetic torque na kumikilos sa isang positibong direksyon, kung gayon ang metalikang kuwintas ay itinuturing na positibo ( M eh> 0). Kung ang motor ay pumasok sa braking mode, ang metalikang kuwintas nito ay magsisimulang kumilos sa kabaligtaran na direksyon ( M eh< 0).
Ang mga static na sandali ng paglaban na nilikha ng gumaganang mekanismo at ang aparato ng paghahatid ay may dalawang uri: reaktibo at aktibo. Ang mga reaktibong sandali ng paglaban ay palaging nakadirekta laban sa direksyon ng pag-ikot, i.e. ay humahadlang ( M st< 0). К реактивным
моментам относятся моменты сил трения, в том числе в самом двигателе, моменты
сопротивления при резании металла на обрабатывающих станках и т.д. Активный момент
всегда действует в одном и том же направлении, независимо от направления вращения,
т.е. может либо препятствовать движению (M st> 0), o mag-ambag dito ( M st< 0). К активным
моментам относятся моменты сил тяжести, сил упругости пружин и т.д.
Mga katangiang mekanikal.
Ang equation ng natural na mekanikal na katangian ng isang induction motor ay ang expression (2.21) o (2.22) na may slip S na pinalitan ng angular velocity ω 2 ayon sa (2.8) para sa U 1 = const. Ang katangian ng graph ay ipinapakita sa fig. 2.12, a.

Fig.2.12
Suriin natin ang mekanikal na katangian sa mga tuntunin ng katatagan, katigasan at linearity.
Itinuturing na ang motor sa isang bukas na drive ay gumagana nang matatag kung, pagkatapos na alisin ang kaguluhan, awtomatiko itong bumalik sa paunang operating point sa mekanikal na katangian. Katangiang mekanikal Ang motor ay ang pag-asa ng angular velocity ng rotor sa electromagnetic torque: ω 2 \u003d f (M em).Ang mekanikal na katangian ng pagkarga ay ang pag-asa ng static na sandali ng paglaban sa motor shaft sa angular velocity: M st \u003d f (ω 2).
Theoretically, ang steady-state na operasyon ng engine ay posible sa mga punto A 1 at A 2, saan M eh=M st.A. Hayaang tumakbo ang makina nang may karga M st.A \u003d const sa punto A 1 at lumilitaw ang isang perturbation, na humahantong sa pagtaas ng angular velocity??. Ang motor pagkatapos ay bumubuo ng isang metalikang kuwintas na naaayon sa punto A 1", at ang pagkarga ay ang sandali ng paglaban na tumutugma sa punto A 1. Kung saan M eh<M st, alinsunod sa moment equilibrium equation, ang angular velocity ω 2 bumababa at bumalik ang makina sa punto A 1. Bumalik sa punto A 1 magaganap din sa negatibong pagtaas ng bilis (point A 1""). Kung ang makina ay tumatakbo na may load sa punto A 2, pagkatapos ay may kaguluhan na humahantong sa pagtaas ng bilis, ang makina ay lumilikha ng isang metalikang kuwintas na naaayon sa punto A 2", at ang pagkarga ay ang sandali ng paglaban na tumutugma sa punto A 2. Kung saan M eh>M st at ang angular velocity ay patuloy na tumataas, ang makina ay lumalayo sa punto A 2. Bumalik sa punto A 2 ay hindi nangyayari kahit na may negatibong pagtaas ng bilis (point A 2""). Sa kasong ito, ang bilis ay patuloy na bababa hanggang sa huminto ang makina.
Samakatuwid, sa punto A 1 ang makina ay tumatakbo nang tuluy-tuloy, at sa punto A 2- hindi matatag. Sa pangkalahatang kaso, ang isang pormal na tanda ng matatag na operasyon ng makina ay ang hindi pagkakapantay-pantay
(dM em /dω 2)< (dM ст /dω 2) (2.30)
Sa isang sandali ng pag-load na hindi nakasalalay sa bilis, i.e. sa M st \u003d cons t, nagkakaroon ng anyo ang hindi pagkakapantay-pantay na ito
(dω 2 /dM em)< 0 (2.31)
Batay sa konsepto ng katatagan ng engine sa isang open drive, kaugalian na tawagan ang mekanikal na katangian ng engine stable kung tinitiyak nito ang matatag na operasyon ng engine sa M st \u003d const.
Kung gagamitin natin ang pormal na pamantayan ng katatagan (2.31), kung gayon madali itong ipakita para sa M st \u003d const ang matatag na operasyon ng makina ay sinisiguro lamang sa lugar mula sa ω 1 dati ω 2cr. Plot mula sa ω 2cr hanggang 0 ay hindi matatag. Ang operating range ng mga torque at bilis ng mga electric drive na may mga asynchronous na motor ay pinili sa loob ng matatag na bahagi ng mga mekanikal na katangian ng motor. Na-rate na punto ng pagkarga M nom ay matatagpuan sa nagtatrabaho na lugar sa paraan na ang labis na karga kapasidad K m \u003d M max / M nom \u003d 1.7 -3.5. Na may mababang resistensya ng rotor R2 kritikal na bilis ω 2cr \u003d (0.8 - 0.9) ω 1 at mahirap ang lugar ng trabaho. Ang mekanikal na katangian ay karaniwang hindi linear, ngunit ang lugar ng pagtatrabaho nito ay malapit sa linear.
Sa loob ng lugar ng pagtatrabaho, ang makina ay kumokontrol sa sarili. Ang pagtaas sa sandali ng paglaban sa baras ng motor mula sa M st.v dati M st.s humahantong sa isang pagbawas sa angular velocity ng rotor mula sa ω 2v dati ω 2s, isang pagtaas sa EMF at kasalukuyang sapilitan sa rotor ng isang umiikot na patlang, at, nang naaayon, isang pagtaas sa electromagnetic na sandali sa isang halaga na katumbas ng bagong halaga ng sandali ng paglaban (transition mula sa punto AT eksakto MULA SA sa mekanikal na katangian).
Mga katangian ng pagpapatakbo
.
Ang mga katangian ng pagganap ng isang induction motor ay ang mga dependences ng angular velocity ng rotor ω 2, kapaki-pakinabang na sandali M 2, kahusayan η
, power factor cos φ 1(φ 1- phase shift sa pagitan U 1 at ako 1) at kasalukuyang stator ako 1 mula sa kapaki-pakinabang na kapangyarihan P2 sa U 1 = U nom at f1 = f nom(Larawan 2.12, b). Ang mga katangian ng pagganap ay maaaring kunin sa eksperimento o kalkulahin gamit ang isang katumbas na circuit.
Kapag lumipat mula sa x.x. (ang motor ay hindi na-load) sa rate ng load mode, ang angular velocity ng rotor ay bahagyang bumababa, dahil ω 2 \u003d (1 - s) ω 1, a S nom, gaya ng nabanggit, ay mga yunit ng porsyento. Alinsunod dito, isang kapaki-pakinabang na sandali M 2 \u003d P 2 / ω 2 tumataas ayon sa isang batas na malapit sa linear. Ang pagbabago sa kasalukuyang stator ay tinutukoy ng tugon ng rotor; ang medyo malaking halaga ng kasalukuyang sa idle ay dahil sa pagkakaroon ng isang air gap. Kasalukuyang x.x. karamihan ay pasaklaw, at kaayon ay mababa cos φ 10- mga 0.1 - 0.2. Habang tumataas ang load, tumataas ang natupok na aktibong kuryente at cos φ 1 lumalaki - ang pinakamataas na halaga nito ay umabot sa 0.7 - 0.9. Ang kasalukuyang ay nagpapanatili ng isang aktibong-inductive na karakter ( φ 1>0) at ang supply network ay puno ng reactive current. kahusayan ng makina η \u003d R 2 / R 1, saan R 1- aktibong kuryenteng natupok ng motor. Na may simetriko na kapangyarihan R 1 \u003d m 1 U 1 I 1 cos φ 1, saan U 1, ako 1– phase boltahe at kasalukuyang. Pag-asa ng kahusayan sa kapangyarihan P 2 \u003d P 1 -Δp e -Δp m -Δp balahibo ay may kaparehong anyo ng transpormer, dahil sa engine, ang mga pagkalugi ay nahahati din sa mga nakapirming at variable na pagkalugi. Para sa mga makina ng maliit at katamtamang kapangyarihan, ang pinakamataas na halaga ng kahusayan η
= 0.7 - 0.9, habang ang mas mababang mga halaga ay tumutukoy sa mga motor na may mas mababang kapangyarihan, na may medyo mas mataas na aktibong pagtutol ng mga windings.
Pinapayuhan ka naming basahin
 Mga sikolohikal na katangian ng mga bata sa pagdadalaga
Mga sikolohikal na katangian ng mga bata sa pagdadalaga Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan
Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan, diagnosis, paggamot Paggamot ng urogenital chlamydia") Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia
Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano

