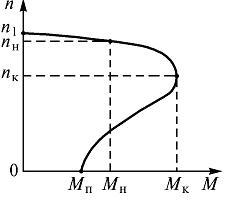
Para sa lahat induction motor ang nominal na mode ay maaaring tukuyin, i.e. ang mode ng pangmatagalang operasyon, kung saan ang makina ay hindi nag-overheat sa itaas ng itinakdang temperatura. Ang sandaling na-rate ang M, na tumutugma sa nominal na mode, ay tinatawag. nominal na sandali. Ang kaukulang rate slip para sa mga asynchronous na motor ng medium power ay s H0M = 0.02 ... 0.06, i.e. ang rate na bilis n at ohm ay nasa loob
n nom = n 0 (1 - s 0) \u003d (0.94 ... 0.98) p 0
Ang ratio ng maximum torque sa nominal sa m = = Mmax / M nom ay tinatawag na overload capacity ng asynchronous motor. Karaniwan k m \u003d 1.8 ... .2.5.
Kapag nagsisimula, ibig sabihin, kapag nagsisimula at sa panahon ng acceleration, ang asynchronous na motor ay nasa mga kondisyon na makabuluhang naiiba sa mga kondisyon ng normal na operasyon. Ang metalikang kuwintas na binuo ng motor ay dapat lumampas sa sandali ng paglaban ng pagkarga, kung hindi man ang motor ay hindi makakapagpabilis. Kaya, mula sa punto ng view ng pagsisimula ng makina, ang panimulang metalikang kuwintas ay gumaganap ng isang mahalagang papel.
Ang ratio ng panimulang metalikang kuwintas M p na binuo ng makina sa isang nakatigil na estado, i.e., sa n \u003d 0, sa na-rate na metalikang kuwintas k p \u003d M p / M nom ay tinatawag na multiplicity ng panimulang metalikang kuwintas.
Ang pinakamataas na sandali ng M max ay tinatawag na kritikal na sandali ng asynchronous na makina. Ang pagpapatakbo ng makina na may metalikang kuwintas na lumalampas sa na-rate ay posible lamang sa maikling panahon, kung hindi man ay nabawasan ang buhay ng serbisyo ng makina dahil sa sobrang pag-init nito.
Bilang isang resulta ng pakikipag-ugnayan ng isang umiikot na magnetic flux sa mga alon na sapilitan nito sa mga conductor ng rotor winding, ang mga puwersa ay lumitaw na kumikilos sa mga conductor na ito sa tangential na direksyon. Hanapin natin ang halaga ng sandali na nilikha ng mga puwersang ito sa baras ng makina.
Ang electromagnetic power na ipinadala sa rotor sa pamamagitan ng umiikot na magnetic field ay katumbas ng:
saan M uh- electromagnetic na sandali kumikilos sa rotor.
Ayon sa katumbas na circuit ng isang yugto ng makina:
Mula sa mga ekspresyong ito makikita natin:
Dahil sa kasalukuyang rotor current, EMF, inductive reactance makuha namin:
Ipinakilala namin ang isang pare-pareho at pinababayaan ang sandali ng alitan, kinakatawan namin ang expression para sa sandali sa baras sa anyo:
Kung ang magnetic flux Ф ay ipinahayag sa mga weber, ang kasalukuyang I 2 - sa mga amperes, kung gayon ang metalikang kuwintas ay nasa newton meters (Nm).
Ang metalikang kuwintas ng makina ay nakasalalay sa pagkarga f, I 2 at , ngunit maaari itong katawanin bilang isang function ng isang variable. Bilang tulad ng isang variable para sa isang induction motor, ito ay pinaka-maginhawa upang piliin ang slip s.
Ayon sa mga naunang pinag-aralan na mga formula:
Ipagpalagay na ang dalas ng network ay hindi nagbabago, ipinakilala namin
36. Mga pamamaraan para sa pag-regulate ng bilis ng pag-ikot ng impiyerno na may maikling circuit. rotor
37.Simulan at kontrolin ang bilis ng pag-ikot ng presyon ng dugo gamit ang f.r.
Ang regulasyon sa pamamagitan ng pagpapalit ng slip ay ginagawa sa pamamagitan ng pagpapalit ng resistance R p ng adjusting rheostat sa rotor circuit.
Ang pagpapakilala ng isang rheostat sa rotor circuit ay nagbabago sa dependence ng torque M sa slip s nang hindi naaapektuhan ang magnitude ng maximum torque. Tatlong katangian M(s): natural (hindi rheostat) na katangian 1 ay tumutugma sa isang short-circuited rotor winding (rheostat resistance = 0), rheostatic (artipisyal) na katangian 2 at 3 ay tumutugma sa ipinakilalang isa at dalawang yugto ng rheostat.
Ang pagpapakilala ng isang rheostat sa rotor circuit ay may positibong epekto sa panimulang kasalukuyang, binabawasan ito ng halos 2 beses kumpara sa isang short-circuited IM.
Ang mga disadvantages ng pamamaraang ito: 1) mababang kahusayan dahil sa mga pagkalugi sa rheostat R p ; 2) pagbawas sa tigas ng mga mekanikal na katangian; 3) ang bilis ay maaari lamang iakma pababa.
Pagsisimula ng isang asynchronous na motor na may isang phase rotor. Ang pagsisimula ng mga asynchronous na motor ay makabuluhang naiiba sa mga kondisyon ng normal na operasyon. Ang metalikang kuwintas ng motor sa pagsisimula ay dapat lumampas sa torque ng paglaban sa pagkarga, ang panimulang metalikang kuwintas ay gumaganap ng isang papel. Ang pangalawang mahalagang panimulang katangian ay ang panimulang kasalukuyang. Pagsisimula ng kasalukuyang ratio para sa mga motor na may rotor ng squirrel-cage umabot sa 5-7, na maaaring hindi katanggap-tanggap para sa motor o para sa network, at maaaring gumawa ng pagkakaiba sa kinis ng pagsisimula. Ang pagsisimula ng isang motor na may isang phase rotor ay isinasagawa sa pamamagitan ng isang 3-phase rheostat, ang bawat yugto nito ay konektado sa pamamagitan ng mga brush at singsing sa isa sa mga phase ng rotor. Sa simula ng pagsisimula, ang rheostat ay ganap na ipinasok, sa pagtatapos ng pagsisimula ay aalisin ito at ang lahat ng tatlong yugto ng rotor ay short-circuited. Ang bilang ng mga hakbang ng rheostat ay kinukuha na higit sa dalawa, at ang proseso ng paglipat sa start-up ay karaniwang awtomatiko. Ang pagpapakilala ng mga aktibong resistensya sa phase rotor circuit ay nagpapataas ng torque at ginagawang maayos ang simula at nililimitahan ang panimulang kasalukuyang. Ang panimulang paraan na ito ay may ilang mga pakinabang, ngunit naaangkop lamang para sa mga motor na may phase rotor.
39.40. Device, prinsipyo ng pagpapatakbo ng engine direktang kasalukuyang. Mga paraan ng paggulo. EMF ng armature winding at electromagnetic torque Disenyo at prinsipyo ng pagpapatakbo ng isang DC motor Ang DC motor ay binubuo ng isang nakapirming bahagi - ang stator at isang umiikot na bahagi - ang armature, na pinaghihiwalay ng isang air gap. Ang pangunahing karagdagang mga pole ay nakakabit sa panloob na ibabaw ng stator. Ang mga pangunahing pole na may mga paikot-ikot na paggulo ay nagsisilbing lumikha ng pangunahing magnetic flux F sa makina, at ang mga karagdagang pole upang mabawasan ang sparking.
Ang armature ay binubuo ng isang baras, isang core, isang paikot-ikot at isang kolektor. Ang kolektor ay naglalaman ng mga plate na tanso na nakahiwalay sa bawat isa, na konektado sa mga seksyon ng armature winding. Ang mga nakapirming brush ay nakapatong sa kolektor; pagkonekta sa armature winding na may panlabas na electrical circuit. Bilang isang resulta ng pakikipag-ugnayan ng kasalukuyang armature Iya At ang magnetic flux Ф, isang metalikang kuwintas ay nilikha, M = CmFIa, kung saan ang Cm ay ang moment constant, na nakasalalay sa data ng disenyo ng makina. Ang metalikang kuwintas M ng makina ay balanse ng sandali ng paglaban Ms ng gumaganang makina. Kapag umiikot ang armature na may dalas n, ang paikot-ikot nito ay tumatawid sa magnetic flux Ф at sa loob nito, ayon sa batas ng electromagnetic induction, ang isang counter-EMF ay sapilitan E \u003d CeFp, kung saan ang Ce ay isang constructive constant.
Ang boltahe sa armature ezhimax U ay katumbas ng kabuuan ng EMF at ang pagbaba ng boltahe sa paglaban ng anchor circuit U=E +RyaIya=CeFn, kung saan ang armature current Ia=(U-CeFn)/Rya, at ang bilis n=(U-RyaIya)/CeF/
Depende sa paraan ng pagbibigay ng excitation winding, ang mga generator ng DC ay:
| a B C D) |
kanin. 50. Generator excitation: a - independent, b - parallel, c - serial, d - mixed.
Sa malayang pagpukaw Ang OB ay pinapagana ng isang panlabas na pinagmulan. Ginagamit ito sa mga kaso kung saan kinakailangan upang ayusin ang kasalukuyang paggulo I at ang boltahe U sa mga clamp ng makina sa isang malawak na hanay. Ang armature current ay katumbas ng load current I I \u003d I n (Fig. 50, a)
Ang mga self-excited na generator ay may mga OB na pinapagana ng generator mismo.
Kapag ang OB ay naka-on sa parallel sa armature winding, mayroon kaming isang generator na may parallel excitation(Larawan 50, b), kung saan ako I \u003d I n + I c. Para sa makapangyarihang mga makina ng normal na pagpapatupad, ang I in ay karaniwang 1-3%, at para sa maliliit na makina - hanggang sa ilang sampu ng% ng kasalukuyang armature. Sa generator na may sunud-sunod na paggulo(Larawan 50, c) Ang ORP ay konektado sa serye kasama ang anchor, i.e.
I i \u003d I n \u003d I c.
Ang mga generator na may halo-halong paggulo ay may dalawang paikot-ikot na paggulo, ang OB ay konektado sa parallel sa armature, at ang iba pang ORP ay nasa serye (Larawan 50, d). Ang pangunahing isa ay karaniwang OB. Ang ORP ay nag-magnetize sa makina na may pagtaas sa kasalukuyang load, na bumabagay sa pagbaba ng boltahe U sa armature winding at ang demagnetizing effect ng armature reaction.
Ang boltahe U 1 na inilapat sa yugto ng stator winding ay balanse ng pangunahing EMF E 1, ang leakage EMF at ang pagbaba ng boltahe sa aktibong paglaban ng stator winding:
Sa isang rotor winding, ang isang katulad na equation ay magiging ganito:
Ngunit dahil sarado ang rotor winding, ang boltahe U 2 \u003d 0, at kung isasaalang-alang din natin na E 2s \u003d SE 2 at x 2s \u003d Sx 2, kung gayon ang equation ay maaaring muling isulat bilang:
![]()
Ang equation para sa mga alon ng isang induction motor ay inuulit ang isang katulad na equation para sa isang transpormer:
28 Asynchronous motor torque
Ang metalikang kuwintas sa isang induction motor ay nilikha sa pamamagitan ng pakikipag-ugnayan ng rotor current sa magnetic field ng makina. Ang metalikang kuwintas ay maaaring mathematically na ipinahayag sa mga tuntunin ng electromagnetic na kapangyarihan ng makina:
saan w 1 =2pn 1 /60 - angular frequency ng pag-ikot ng field. Sa turn nito, n 1 =f 1 60/R, pagkatapos
![]()
Palitan sa formula M 1 pagpapahayag REm=Pe2/S at, hinahati sa 9.81, nakukuha natin ang:
![]()
Induction Motor Torque Equation
Sinusunod nito na ang metalikang kuwintas ng motor ay proporsyonal sa mga pagkalugi ng kuryente sa rotor. Palitan sa huling formula ang kasalukuyang halaga ako 2 ’ :
nakuha namin ang equation para sa metalikang kuwintas ng isang induction motor:
saan U 1 - phase boltahe ng stator winding.
29 .Katangian ng makina ng motor ay tinatawag na dependence ng rotor speed sa torque sa shaft n = f (M2). Dahil ang idle torque ay maliit sa ilalim ng pagkarga, pagkatapos ay M2 ≈ M at mekanikal na katangian ay kinakatawan ng dependence n = f (M). Kung isasaalang-alang natin ang relasyon s = (n1 - n) / n1, kung gayon ang mekanikal na katangian ay maaaring makuha sa pamamagitan ng paglalahad ng graphical dependence nito sa mga coordinate n at M (Fig. 1).
kanin. 1. Mechanical na katangian ng asynchronous na motor
Natural na mekanikal na katangian ng isang induction motor tumutugma sa pangunahing (pasaporte) circuit ng pagsasama nito at ang mga nominal na parameter ng boltahe ng supply. Mga artipisyal na katangian ay nakuha kung ang anumang karagdagang mga elemento ay kasama: resistors, reactors, capacitors. Kapag ang motor ay binibigyan ng isang hindi na-rate na boltahe, ang mga katangian ay naiiba din sa natural na mekanikal na katangian.
Ang mga mekanikal na katangian ay napaka-maginhawa at nakakatulong na gamit sa pagsusuri ng static at dynamic na mga mode ng electric drive.
30 Katangiang mekanikal at regulasyon sa sarili ng motor. Ang graph na nag-uugnay sa mga mekanikal na dami - bilis at metalikang kuwintas - ay tinatawag na mekanikal na katangian ng isang induction motor (Larawan 7) n = ƒ(M). Ang self-regulation ng isang asynchronous na motor ay ang mga sumusunod. Hayaang gumana nang tuluy-tuloy ang makina sa ilang mode, pagbuo ng bilis n1 at torque M1. Sa pare-parehong pag-ikot, ang sandaling ito ay katumbas ng braking torque M t1, ibig sabihin. M1=M t 1, n1= conset. Ang pagtaas ng braking torque sa M2 ay magdudulot ng pagbaba sa bilis ng makina, dahil ang braking torque ay magiging mas malaki kaysa sa torque. Sa isang pagbawas sa bilis, ang pagtaas ng slip, na nagiging sanhi ng pagtaas sa EMF at kasalukuyang sa rotor. Pinatataas nito ang metalikang kuwintas ng makina. Ang prosesong ito ay nagtatapos kapag ang torque M2 na binuo ng makina ay naging katumbas ng M t 2. Sa kasong ito, ang bilis ng pag-ikot ay nakatakdang mas mababa sa n1. Ang pag-aari ng awtomatikong ekwilibriyo sa pagitan ng pagpepreno at metalikang kuwintas ay tinatawag regulasyon sa sarili.
Sa isang laboratory stand, ang makina ay puno ng isang electric brake, na binubuo ng isang electromagnet, sa puwang kung saan ang isang disc ay umiikot, na nakatanim sa baras ng makina. Sa pamamagitan ng pagbabago ng boltahe na nagbibigay ng electromagnet coil na may hawakan ng autotransformer, posible na baguhin ang puwersa ng pagpepreno, ang sandali kung saan ay: M TORM \u003d F r (N m)
kung saan ang F ay ang puwersa (force) na kumikilos sa circumference ng pulley, (N);
r - pulley radius, katumbas ng 0.18 m. Kapaki-pakinabang na kapangyarihan sa motor shaft:
saan n- bilis ng pag-ikot ng engine, rpm.
kung saan ƒ - dalas ng network (katumbas ng 50 Hz),
R- bilang ng mga pares ng mga pole ng stator winding (katumbas ng 2).
n 1 - kasabay na bilis ng umiikot magnetic field.
Ang bilis ng engine ay tinutukoy gamit ang isang tachometer. Ang slip ay kinakalkula ng formula:
31 Mga katangian ng pagpapatakbo tinawag mga dependency sa kapangyarihan, natupok ng motor, natupok ang kasalukuyang I, power factor, bilis ng motor, kahusayan at torque M mula sa kapaki-pakinabang na kapangyarihan ng motor na ibinigay sa baras. Tinutukoy ng mga katangian ng pagganap ang mga pangunahing katangian ng pagganap ng isang induction motor. Ang mga katangian ng pagganap ng isang medium power induction motor ay ipinapakita sa fig. 8.8. Ang kanilang pag-uugali ay ipinaliwanag tulad ng sumusunod. Sa magaan na pag-load, ang motor current I (no-load current) ay maaaring nasa pagitan ng 20% at 70% ng rate na kasalukuyang. Habang tumataas ang load, tumataas ang kasalukuyang nasa rotor circuit, na humahantong sa halos proporsyonal na pagtaas ng kasalukuyang ako sa stator circuit.

Fig.8.8 Torque ng motor () ay halos proporsyonal din sa pagkarga, ngunit sa matataas na pagkarga, ang linearity ng graph ay medyo nalabag sa pamamagitan ng pagbawas sa bilis ng makina. Ang katangian ng pagganap ay nagpapahayag ng kaugnayan sa pagitan ng kapangyarihan na binuo ng motor at ang phase shift sa pagitan ng kasalukuyang stator at boltahe. Ang isang asynchronous na motor, tulad ng isang transpormer, ay kumokonsumo ng isang kasalukuyang I mula sa network, na kung saan ay makabuluhang wala sa phase na may inilapat na boltahe. Halimbawa, sa idle mode. Sa pagtaas ng pagkarga sa motor shaft, ang mga aktibong bahagi ng rotor at stator currents ay tumataas, tumataas . Ang maximum na halaga ay naabot sa .
Sa karagdagang pagtaas, ang halaga ay bababa nang bahagya. Ito ay dahil sa pagtaas ng slip s, na nagiging sanhi ng pagtaas ng reactance ng rotor winding, at, dahil dito, ang phase shift . MULA SA tumataas at tumataas, i.e. bababa.
Pag-uugali katangian ng pagpapatakbo ay ipinaliwanag tulad ng sumusunod. Ang halaga ng kahusayan ay tinutukoy ng ratio ng kapaki-pakinabang na kapangyarihan sa kapangyarihan na natupok mula sa network.
Ang halaga ay tinatawag na pagkawala ng kuryente. Bilang karagdagan sa mga pagkalugi sa bakal ng stator at rotor dahil sa magnetization reversal at eddy currents, na, kasama ang mekanikal na pagkalugi, ay maaaring ituring na pare-pareho, may mga pagkalugi sa tanso sa isang asynchronous na motor. ,
mga. sa stator at rotor windings, na proporsyonal sa parisukat ng kasalukuyang dumadaloy at samakatuwid ay nakasalalay sa pagkarga. Sa panahon ng kawalang-ginagawa, tulad ng sa isang transpormer, ang mga pagkalugi sa bakal ay nangingibabaw, dahil, at katumbas ng walang-load na kasalukuyang, na maliit. Sa maliit na pagkarga sa baras, ang mga pagkalugi sa tanso ay nananatiling maliit, at samakatuwid ang kahusayan ay tinutukoy ng formula ![]() (8.5)
(8.5)
tumataas nang husto sa una. Kapag ang mga nakapirming pagkalugi ay naging katumbas ng mga pagkalugi na umaasa sa pagkarga , kahusayan umabot sa pinakamataas na halaga nito. Sa isang karagdagang pagtaas sa pag-load, ang mga variable na pagkawala ng kapangyarihan ay tumaas nang malaki, bilang isang resulta kung saan ang kahusayan kapansin-pansing bumababa. Ang kalikasan ng pagkagumon ) maaaring ipaliwanag mula sa kaugnayan . Kung ang kahusayan ay pare-pareho, pagkatapos ay magkakaroon ng isang linear na relasyon sa pagitan ng at. Ngunit dahil ang kahusayan depende sa at ang pag-asa na ito sa simula ay tumataas nang husto, at sa karagdagang pagtaas sa pagkarga ay bahagyang nagbabago, pagkatapos ay ang curve ) unang tumataas nang dahan-dahan, at pagkatapos ay tumataas nang husto.
32 sa anumang de-koryenteng circuit ang kabuuan ng mga kapangyarihan ng lahat ng pinagmumulan ng elektrikal na enerhiya ay dapat na katumbas ng kabuuan ng mga kapangyarihan ng lahat ng mga receiver at pantulong na elemento. Ang pagkakaroon ng dati nang nakuha ang mga expression ng kapangyarihan, posible na isulat sa isang pangkalahatang anyo ang equation ng balanse ng kapangyarihan para sa anumang electrical circuit:
Σ E → ako → + Σ U ← ako → = Σ E ← ako → + Σ U → ako → + Σ ako 2 r.
Ang equation (1.35) ay maaaring isulat pareho para sa mga tunay na EMF na direksyon, boltahe at agos, at para sa kaso kapag ang ilan sa mga ito ay arbitraryong pinili ng mga positibong direksyon. Sa unang kaso, ang lahat ng mga termino sa loob nito ay magiging positibo at ang mga kaukulang elemento ng circuit ay talagang mga mapagkukunan o mga tatanggap ng elektrikal na enerhiya. Kung, sa kabilang banda, ang ilang mga termino ay isinulat na may kinalaman sa arbitraryong napiling positibong direksyon, ang mga kaukulang elemento ay dapat ituring bilang nilalayong mga mapagkukunan at tatanggap. Bilang resulta ng pagkalkula o pagsusuri, ang ilan sa mga ito ay maaaring maging negatibo. Nangangahulugan ito na ang ilan sa mga dapat na pinagmumulan ay talagang isang lababo, at ang ilan sa mga dapat na lababo ay isang pinagmumulan.
33 Pagsisimula ng isang asynchronous na motor ay sinamahan ng isang lumilipas na proseso ng makina na nauugnay sa paglipat ng rotor mula sa isang estado ng pahinga sa isang estado ng pare-parehong pag-ikot, kung saan binabalanse ng metalikang kuwintas ng makina ang sandali ng mga puwersa ng paglaban sa baras ng makina. Kapag nagsisimula ng isang asynchronous na motor, mayroong isang pagtaas ng pagkonsumo ng elektrikal na enerhiya mula sa network ng supply, na ginugol hindi lamang sa pagtagumpayan ng braking torque na inilapat sa baras at sumasakop sa mga pagkalugi sa asynchronous na motor mismo, kundi pati na rin sa pakikipag-usap sa isang tiyak na kinetic energy sa mga gumagalaw na bahagi ng production unit. Samakatuwid, kapag nagsisimula, ang isang asynchronous na motor ay dapat bumuo ng isang mas mataas na metalikang kuwintas. Para sa asynchronous motor na may isang phase rotor ang paunang panimulang metalikang kuwintas, na tumutugma sa slip sp = 1, ay nakasalalay sa mga aktibong resistensya ng mga adjustable na resistors na ipinakilala sa rotor circuit.
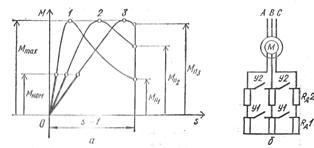
kanin. 1. Pagsisimula ng isang three-phase asynchronous motor na may isang phase rotor: a - mga graph ng pagtitiwala ng metalikang kuwintas ng motor na may isang phase rotor sa slip sa iba't ibang mga aktibong resistensya ng mga resistors sa rotor circuit, b - diagram ng pagsasama ng resistors at acceleration closing contact sa rotor circuit. Kaya, na may saradong acceleration contact na U1, U2, ibig sabihin, kapag nagsisimula ng isang asynchronous na motor na may mga short-circuited contact ring, ang paunang panimulang torque Mp1 = (0.5 -1.0) Mnom, at ang paunang panimulang kasalukuyang Ip = (4.5 - 7) Inom at higit pa. Maliit na panimulang metalikang kuwintas asynchronous na motor na may rotor ng sugat ay maaaring hindi sapat upang himukin ang yunit ng produksyon at pagkatapos ay mapabilis ito, at ang isang makabuluhang panimulang kasalukuyang ay magdudulot ng pagtaas ng pag-init windings ng motor, na naglilimita sa dalas ng pag-on nito, at sa mga network na may mababang kapangyarihan ay humahantong sa isang pansamantalang pagbaba ng boltahe na hindi kanais-nais para sa pagpapatakbo ng iba pang mga receiver. Ang mga pangyayaring ito ay maaaring ang dahilan na hindi kasama ang paggamit ng mga asynchronous na motor na may isang phase rotor na may malaking panimulang kasalukuyang upang magmaneho ng mga gumaganang mekanismo. Ang pagpapakilala ng mga adjustable resistors, na tinatawag na panimulang resistors, sa motor rotor circuit ay hindi lamang binabawasan ang paunang panimulang kasalukuyang, ngunit sa parehong oras ay pinapataas ang paunang panimulang metalikang kuwintas, na maaaring maabot ang maximum na metalikang kuwintas Mmax (Larawan 1, a, curve 3 ), kung ang kritikal na slip ng motor na may isang phase rotor ay sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, kung saan ang Rd" ay ang aktibong paglaban ng risistor na matatagpuan sa yugto ng ang motor rotor winding, nabawasan sa phase ng stator winding. Ang karagdagang pagtaas sa aktibong paglaban ng panimulang risistor ay hindi praktikal, dahil humahantong ito sa isang pagpapahina ng paunang panimulang metalikang kuwintas at ang paglabas ng pinakamataas na punto ng metalikang kuwintas sa slip region s > 1, na hindi kasama ang posibilidad ng pagpabilis ng rotor. Ang kinakailangang aktibong paglaban ng mga resistors para sa pagsisimula ng isang motor na may isang phase rotor ay tinutukoy batay sa mga kinakailangan ng pagsisimula, na maaaring maging madali kapag Mp = (0.1 - 0.4) Mnom, normal kung Mp - (0.5 - 0.75) Mnom, at mabigat sa Mp ≥ Mnom. Upang mapanatili ang isang sapat na malaking metalikang kuwintas ng motor na may isang phase rotor sa panahon ng pagpabilis ng yunit ng produksyon upang mabawasan ang tagal ng lumilipas na proseso at bawasan ang pag-init ng motor, kinakailangan na unti-unting bawasan ang aktibong paglaban ng panimulang mga resistor. Ang pinahihintulutang pagbabago ng torque sa panahon ng acceleration M(t) ay tinutukoy ng mga electrical at mechanical na kondisyon na naglilimita sa peak torque limit M > 0.85 Mmax, ang switching torque M2 > > Ms (Fig. 2), pati na rin ang acceleration.

kanin. 2. Mga panimulang katangian ng isang three-phase asynchronous na motor na may isang phase rotor. Ang paglipat ng mga panimulang resistor ay ibinibigay ng sunud-sunod na pag-on ng mga contactor ng acceleration Y1, Y2, ayon sa pagkakabanggit, sa mga oras na t1, t2, binibilang mula sa sandaling nagsimula ang makina, kapag sa panahon ng pagpabilis ang metalikang kuwintas M ay nagiging katumbas ng sandali ng paglipat M2. Dahil dito, sa buong start-up, ang lahat ng peak torque ay pareho at lahat ng switching torques ay pantay sa isa't isa. Dahil ang metalikang kuwintas at kasalukuyang ng isang asynchronous na motor na may isang phase rotor ay magkaugnay, posibleng itakda ang peak current limit I1 \u003d (1.5 - 2.5) Inom at ang switching current I2 sa panahon ng acceleration ng rotor, na dapat magbigay ang switching moment M2\u003e Mc. Ang pagdiskonekta ng mga asynchronous na motor na may isang phase rotor mula sa supply network ay palaging ginagawa sa rotor circuit na short-circuited, upang maiwasan ang mga overvoltage sa mga phase ng stator winding, na maaaring lumampas sa rated boltahe ng mga phase na ito ng 3-4 beses kung ang rotor circuit ay bukas sa sandaling naka-off ang makina.
34 Regulasyon ng dalas. Ang pamamaraang ito ng kontrol sa bilis ay nagbibigay-daan sa paggamit ng pinaka maaasahan at pinakamurang mga asynchronous na motor na may rotor na squirrel-cage. Gayunpaman, upang baguhin ang dalas ng boltahe ng supply, kinakailangan ang isang variable frequency na pinagmumulan ng electric current. Bilang huli, ang alinman sa mga kasabay na generator na may variable na bilis ay ginagamit, o ang mga frequency converter - electric o static, na ginawa sa kinokontrol na mga balbula ng semiconductor (thyristors). Sa kasalukuyan, ang mga frequency converter ay may medyo kumplikadong circuit at medyo mataas ang gastos. Gayunpaman, ang mabilis na pag-unlad ng teknolohiya ng power semiconductor ay nagpapahintulot sa amin na umasa para sa karagdagang pagpapabuti ng mga frequency converter, na nagbubukas ng mga prospect para sa malawak na aplikasyon regulasyon ng dalas. Ang isang detalyadong paglalarawan ng mga batas ng kontrol para sa regulasyon ng dalas at isang pagsusuri sa pagpapatakbo ng isang asynchronous na motor kapag pinalakas ng isang frequency converter ay ibinibigay sa § 4.13 at 4.14. Regulasyon sa pamamagitan ng pagpapalit ng bilang ng mga poste. Ang regulasyong ito ay nagpapahintulot sa iyo na makakuha ng isang hakbang na pagbabago sa bilis. Sa fig. 4.35 ang ipinakita ang pinakasimpleng circuit(para sa isang yugto), na nagpapahintulot sa iyo na baguhin ang bilang ng mga pole ng stator winding nang dalawang beses. Upang gawin ito, ang bawat yugto ng paikot-ikot na stator ay nahahati sa dalawang bahagi, na inililipat mula sa serye na koneksyon sa parallel. Makikita sa pigura na kapag ang mga coils 1-2 at 3-4 ay nakabukas sa dalawang parallel na sanga, ang bilang ng mga pole ay nahahati, at, dahil dito, ang dalas ng pag-ikot ng magnetic field ay nadoble. Kapag lumilipat, ang bilang ng mga pagliko na konektado sa serye sa bawat yugto ay hinahati, ngunit dahil dumoble ang bilis ng pag-ikot, ang EMF na na-induce sa bahagi ay nananatiling hindi nagbabago. Samakatuwid, ang motor sa parehong bilis ay maaaring konektado sa network na may parehong boltahe. Upang hindi lumipat sa rotor winding, ang huli ay ginanap short-circuited. Kung kailangan mong magkaroon ng tatlo o apat na bilis, pagkatapos ay ang isa pang paikot-ikot ay inilalagay sa stator, sa pamamagitan ng paglipat kung saan maaari kang makakuha ng karagdagang dalawang frequency. Ang mga induction motor na nagpapalit ng poste ay tinatawag multi-bilis. Regulasyon sa pamamagitan ng pagsasama ng isang rheostat sa rotor circuit. Kapag ang mga karagdagang aktibong resistensya ay kasama sa rotor circuit R ext1 , R ext2 , R add3 at iba pa ay nagbabago sa anyo ng dependency M = (mga) f at mekanikal na katangian n 2 = f(M) engine (Larawan 4.37, a). Kasabay nito, ilang sandali ng pag-load M n match slip s 1 , s 2 , s 3 , ..., mas malaki kaysa sa mga slip s e , kapag ang makina ay tumatakbo sa isang natural na katangian (kapag R ext = 0). Samakatuwid, ang steady-state na bilis ng engine ay bumababa mula sa n e dati P 1 P 2 , P 3 ,... (Larawan 4.37, b). Ang paraan ng kontrol na ito ay maaari lamang gamitin para sa mga motor na slip-ring. Pinapayagan ka nitong maayos na baguhin ang bilis sa isang malawak na hanay. Ang mga disadvantage nito ay: a) malaking pagkawala ng enerhiya sa control rheostat; b) labis na "malambot" na mga mekanikal na katangian ng makina na may mataas na pagtutol sa rotor circuit. Sa ilang mga kaso, ang huli ay hindi katanggap-tanggap, dahil ang isang maliit na pagbabago sa metalikang kuwintas ng pagkarga ay tumutugma sa isang makabuluhang pagbabago sa bilis.
35 Asynchronous generator- ito ay isang asynchronous electric machine (el. engine) na tumatakbo sa generator mode. Sa tulong ng isang drive motor (sa aming kaso, isang wind turbine), ang rotor ng isang asynchronous electric generator ay umiikot sa parehong direksyon tulad ng magnetic field. Sa kasong ito, ang slip ng rotor ay nagiging negatibo, ang isang braking torque ay lilitaw sa baras ng asynchronous machine, at ang generator ay naglilipat ng enerhiya sa network. Para sa pagpukaw puwersang electromotive ang output circuit nito ay gumagamit ng natitirang magnetization ng rotor. Para dito, ginagamit ang mga capacitor. Ang mga asynchronous na generator ay hindi madaling kapitan ng mga short circuit. Ang isang asynchronous na generator ay mas simple kaysa sa isang kasabay na generator (halimbawa, generator ng kotse): kung ang huli ay may mga inductors na inilagay sa rotor, kung gayon ang rotor ng asynchronous generator ay mukhang isang maginoo na flywheel. Ang ganitong generator ay mas mahusay na protektado mula sa dumi at kahalumigmigan, mas lumalaban sa short circuit at mga overload, at ang output boltahe ng asynchronous generator ay may mas mababang antas ng non-linear distortion. Ito ay nagpapahintulot sa iyo na gumamit ng mga asynchronous na generator hindi lamang sa pagpapagana ng mga pang-industriya na aparato na hindi kritikal sa hugis ng input boltahe, kundi pati na rin upang ikonekta ang mga elektronikong kagamitan. Ito ay isang asynchronous electric generator na isang mainam na mapagkukunan ng kasalukuyang para sa mga device na may aktibong (ohmic) na load: mga electric heater, welding converter, mga maliwanag na lampara, electronic device, computer at radio engineering. Mga pakinabang ng isang asynchronous generator. Kasama sa mga bentahe na ito ang isang mababang malinaw na kadahilanan (harmonic coefficient), na nagpapakilala sa dami ng presensya ng mas mataas na harmonika sa output boltahe ng generator. Ang mas mataas na mga harmonika ay nagdudulot ng hindi pantay na pag-ikot at walang silbi na pag-init ng mga de-koryenteng motor. Ang mga kasabay na generator ay maaaring magkaroon ng isang malinaw na kadahilanan ng hanggang sa 15%, at ang malinaw na kadahilanan ng isang asynchronous na generator ay hindi lalampas sa 2%. Kaya, ang isang asynchronous electric generator ay gumagawa lamang ng kapaki-pakinabang na enerhiya. Ang isa pang bentahe ng isang asynchronous generator ay na ito ay ganap na kulang sa umiikot na paikot-ikot at mga elektronikong bahagi na sensitibo sa mga panlabas na impluwensya at kadalasang madaling masira. kaya lang asynchronous generator kaunting pagsusuot at maaaring maglingkod nang napakatagal. Ang output ng aming mga generator ay agad na 220/380V AC, na maaaring magamit nang direkta sa mga gamit sa sambahayan (halimbawa, mga heater), upang mag-charge ng mga baterya, upang kumonekta sa isang sawmill, at para rin sa parallel na operasyon sa isang tradisyunal na network. Sa kasong ito, babayaran mo ang pagkakaiba na nakonsumo mula sa network at nabuo ng windmill. kasi Dahil ang boltahe ay dumarating kaagad sa mga parameter ng industriya, kung gayon hindi mo kakailanganin ang iba't ibang mga converter (inverters) kapag ang wind generator ay direktang konektado sa iyong load. Halimbawa, maaari kang direktang kumonekta sa isang sawmill at, sa pagkakaroon ng hangin, gumana na parang nakakonekta ka lang sa isang 380V network. Tulad ng alam mo, upang mabawasan ang oras ng pagpepreno kapag huminto sa mga makina at mekanismo ng produksyon, madalas na ginagamit ang mga mekanikal na preno. Ang pagbawas sa oras ng pagpepreno, lalo na sa kaso ng isang maikling cycle ng trabaho, ay humahantong sa isang makabuluhang pagtaas sa produktibidad ng mga makina at mekanismo. Ang mga disadvantages ng mga mekanikal na preno ay ang mabilis na pagsusuot ng mga gasgas na ibabaw, ang pagiging kumplikado at pangangailangan para sa pana-panahong pagsasaayos ng puwersa ng pagpepreno, ang pangangailangan para sa karagdagang puwang para sa paglalagay ng preno at ang koneksyon nito sa mekanismo. Ang lahat ng mga sagabal sa itaas ay tinanggal kung, para sa ipinahiwatig na mga layunin, sa halip na isang mekanikal na preno, ang mga katangian ng mga de-koryenteng motor ay ginagamit upang gumana sa mga mode ng pagpepreno, iyon ay, upang gumana bilang isang generator at hindi bumuo ng isang metalikang kuwintas, ngunit isang braking torque. Sa maraming mga hoisting at transport machine (crane, elevator, escalator, atbp.), Kung saan posible ang paggalaw sa ilalim ng impluwensya ng gravity, ang isang pare-pareho, tuluy-tuloy na rate ng pagpapababa ng mga load ay sinisiguro gamit ang braking torque ng electric motor. Ang mga DC motor ay maaaring gumana sa tatlong mga mode ng pagpepreno:
Sa mode ng pagsalungat;
Sa generator mode na may output ng enerhiya sa network;
Nasa mode dynamic na pagpepreno.
Sa alinman sa mga mode ng pagpepreno, ang de-koryenteng motor ay gumagana bilang isang generator, nagko-convert, halimbawa, ang kinetic energy ng mga gumagalaw na bahagi o ang potensyal na enerhiya ng isang pababang load sa elektrikal na enerhiya.
36 Kapag ang makina ay binaligtad sa paggalaw sa pamamagitan ng paglipat ng switch, ang pagpepreno ay unang nangyayari mula sa isang ibinigay na bilis hanggang sa zero, at pagkatapos ay acceleration sa kabilang direksyon. Ang ganitong pagpepreno ay maaari ding gamitin para sa pagpepreno sa panahon ng tinatawag na pagsalungat. Sa panahon ng pagbaliktad o pagpepreno na ito, ang isang squirrel-cage induction motor ay may malalaking alon. Samakatuwid, batay sa mga kondisyon ng pag-init para sa mga makinang ito, ang bilang ng mga pagbabalik sa bawat oras ay hindi hihigit sa sampu. Upang limitahan ang mga alon at dagdagan ang mga torque, ang paglaban ay ipinakilala sa phase rotor circuit ng isang asynchronous na motor. Isaalang-alang natin ang tatlong pangunahing paraan ng electric braking ng mga asynchronous na motor. Pagpepreno sa pamamagitan ng oposisyon, gaya ng ipinahiwatig, ito ay ginagawa kapag ang makina ay inililipat on the go. Sa kasong ito, ang magnetic field ay umiikot sa kabaligtaran na direksyon na may kaugnayan sa direksyon ng pag-ikot ng motor, at ang metalikang kuwintas ng motor ay pagpepreno - ito ay kumikilos laban sa direksyon ng pag-ikot. Pagpepreno ng generator nagaganap kapag lumilipat ng isang multi-speed engine sa paglipat mula sa isang mas mataas na bilis sa isang mas mababang isa, i.e. kapag inililipat ang makina mula sa mas maliit na bilang ng mga pole patungo sa mas malaki. Sa unang sandali ng paglipat, ang bilis ng engine ay lumalabas na mas malaki kaysa sa bilis ng field nito, ibig sabihin, ang slip ay lumalabas na negatibo at ang makina ay lumipat sa generator mode. Ang pagpepreno ay nangyayari sa pagbabago ng kinetic energy ng mga umiikot na bahagi sa enerhiyang elektrikal, na binawasan ang mga pagkalugi sa makina ay ibinibigay sa network. Ang generator braking ay maaari ding nasa elevator kapag nagpapababa ng mabigat na karga, na nagpapabilis sa makina sa bilis na lampas sa kasabay; pagkatapos ay magsisimulang ibigay ng makina sa network ang enerhiya na ibinibigay dito ng pababang pagkarga. Ang generator braking ay posible lamang sa oversynchronous na bilis. Kung ang makina ay dapat na huminto sa dulo ng pagpepreno, pagkatapos ay sa pagtatapos ng pagpepreno, ang isa ay dapat lumipat sa mekanikal na pagpepreno o sa isa pang uri ng electric braking (dynamic, counter-switching). Ang pag-aayos ng posisyon sa dulo, kung kinakailangan, ay isinasagawa lamang sa tulong ng isang mekanikal na preno. Sa dynamic na pagpepreno ang paikot-ikot na stator ng motor ay hindi nakakonekta tatlong-phase na network at kasama sa network ng direkta o single-phase na alternating currents. Sa kasong ito, posible ang iba't ibang paraan ng pagkonekta sa mga phase ng stator winding. Ang paikot-ikot na stator, na pinapagana ng direktang kasalukuyang, ay lumilikha ng isang nakatigil na magnetic field. Tulad ng sa normal na operasyon ng makina, ang umiikot na field nito ay hinihila ang rotor kasama nito, ang isang nakatigil na field sa panahon ng dynamic na pagpepreno ay nagiging sanhi ng mabilis na paghinto ng rotor. Kinetic energy ang mga umiikot na bahagi ay na-convert sa init na inilabas sa rotor circuit dahil sa mga alon na naudyok dito ng nakapirming stator field. Ang kinis ng pagpepreno ay tinitiyak sa pamamagitan ng pag-regulate ng boltahe sa mga terminal ng stator. Ang braking torque ng motor na may phase rotor ay maaari ding i-regulate ng isang rheostat sa rotor circuit. Ang kawalan ng dynamic na pagpepreno ay ang pangangailangan para sa isang mababang boltahe na mapagkukunan ng DC.
37 Kasabay na makina- ito ay isang AC electric machine, ang bilis ng rotor na kung saan ay katumbas ng dalas ng pag-ikot ng magnetic field sa air gap. Ang mga pangunahing bahagi ng isang kasabay na makina ay ang armature at ang inductor. Ang pinakakaraniwang disenyo ay isa kung saan ang armature ay matatagpuan sa stator, at mayroong isang inductor sa rotor na pinaghihiwalay mula dito ng isang air gap. Ang armature ay isa o higit pang AC windings. Sa mga motor, ang mga alon na ibinibigay sa armature ay lumilikha ng isang umiikot na magnetic field na nagsasama sa larangan ng inductor, at sa gayon ang enerhiya ay na-convert. Ang armature field ay nakakaapekto sa field ng inductor at samakatuwid ay tinatawag din anchor reaction field. Sa mga generator, nilikha ang field ng reaksyon ng anchor alternating currents sapilitan sa armature winding mula sa inductor. Ang inductor ay binubuo ng mga pole - DC electromagnets o permanenteng magnet (sa micromachines). May dalawang magkaibang disenyo ang mga synchronous machine inductors: salient pole o non-salient pole. Ang isang salient pole machine ay nakikilala sa pamamagitan ng katotohanan na ang mga pole ay binibigkas at may disenyo na katulad ng mga pole ng isang DC machine. Sa isang implicit na disenyo ng poste, ang excitation winding ay umaangkop sa mga grooves ng inductor core, na halos kapareho sa winding ng mga rotors ng mga asynchronous na makina na may phase rotor, na ang pagkakaiba lamang ay ang isang puwang na natitira sa pagitan ng mga pole na hindi napuno ng mga konduktor (ang tinatawag na malaking ngipin). Ang mga non-salient pole na disenyo ay ginagamit sa mga high-speed machine upang bawasan ang mekanikal na pagkarga sa mga pole. Upang mabawasan ang magnetic resistance, iyon ay, upang mapabuti ang pagpasa ng magnetic flux, ginagamit ang mga ferromagnetic core ng rotor at stator. Karaniwan, ang mga ito ay isang nakalamina na de-koryenteng istraktura ng bakal (iyon ay, binuo mula sa magkahiwalay na mga sheet). Ang bakal na elektrikal ay may isang bilang ng mga kagiliw-giliw na katangian. Sa partikular, mayroon itong mataas na nilalaman ng silikon upang mapataas ang resistensya ng kuryente nito at sa gayon ay mabawasan ang mga eddy currents.
Ang pagkilos ng isang magnetic field sa isang kasalukuyang-carrying coil ay ginagawang posible na gamitin ito upang matukoy magnetic induction module. Ang pag-ikot ng coil sa isang magnetic field ay nagpapahiwatig na hindi bababa sa dalawang pwersa ang kumikilos dito. Ang resulta ng mga puwersang ito ay ilalapat sa mga puntong A at B (Larawan 6.8). Torque, na kumikilos sa coil, ay magiging katumbas ng produkto ng isa sa mga puwersang ito F̅ sa radius ng pagliko r. Ang puntong ito ay hindi kailangang kalkulahin. Masusukat ito gamit ang coil spring o iba pang sensitibong device para sa pagsukat ng mechanical torque na konektado sa coil.
Ipinakikita ng mga eksperimento na ang isang coil na may kasalukuyang sa isang magnetic field ay palaging umiikot upang ang direksyon ng normal nito nᅳ tumutugma sa direksyon ng magnetic induction ng patlang na pinag-aaralan B̅. Malinaw, sa kasong ito, ang metalikang kuwintas ay magiging zero. Magkakaroon ito ng maximum na halaga kapag ang anggulo sa pagitan ng magnetic induction B̅ at normal nᅳ magiging 90°.
Ang magnetic induction ay maaaring matukoy sa pamamagitan ng puwersa ng pagkilos ng isang magnetic field sa isang kasalukuyang may kasalukuyang.
Nang hindi binabago ang kasalukuyang lakas sa konduktor, sinisiyasat namin kung paano nakasalalay ang halaga maximum na metalikang kuwintas mula sa mga parameter ng coil.
Ang paglalagay ng coil sa isang tiyak na distansya mula sa kasalukuyang nagdadala ng konduktor, sinusukat namin ang maximum na metalikang kuwintas Mmax para sa isang tiyak na halaga ng kasalukuyang sa isang likid ako 1. Doblehin natin ang kasalukuyang sa likid. Sa Ako 2 = 2ako 1 ang maximum na mekanikal na sandali ay magiging katumbas ng M max 2 = 2M max 1. Ang parehong ay sinusunod sa isang pagtaas sa kasalukuyang lakas ng 3, 4, 5 beses. Sa ganitong paraan, maximum na halaga ng metalikang kuwintas, na kumikilos sa coil na may kasalukuyang, ay magiging proporsyonal sa kasalukuyang nasa coil
Mmax ~vit.
Torque , na kumikilos sa isang coil sa isang magnetic field, ay proporsyonal sa lakas ng kasalukuyang nasa loob nito.materyal mula sa site
Kung papalitan natin ang coil na ito ng isa pa, na may mas malaki o mas maliit na lugar S vit, mapapansin natin ang katumbas na pagtaas o pagbaba sa halaga ng pinakamataas na torque. Sa ganitong paraan,
maximum na metalikang kuwintas , na kumikilos sa isang coil sa isang magnetic field, ay proporsyonal sa lugar nito:
Mmax ~S vit.
Ang pagsasama-sama ng mga resulta ng parehong mga yugto ng pananaliksik, nakukuha namin
Mmax ~vit.S vit.
Sa pahinang ito, materyal sa mga paksa:
Ang boltahe U 1 na inilapat sa yugto ng stator winding ay balanse ng pangunahing EMF E 1, ang leakage EMF at ang pagbaba ng boltahe sa aktibong paglaban ng stator winding:
Sa isang rotor winding, ang isang katulad na equation ay magiging ganito:
Ngunit dahil sarado ang rotor winding, ang boltahe U 2 \u003d 0, at kung isasaalang-alang din natin na E 2s \u003d SE 2 at x 2s \u003d Sx 2, kung gayon ang equation ay maaaring muling isulat bilang:
![]()
Ang equation para sa mga alon ng isang induction motor ay inuulit ang isang katulad na equation para sa isang transpormer:
28 Asynchronous motor torque
Ang metalikang kuwintas sa isang induction motor ay nilikha sa pamamagitan ng pakikipag-ugnayan ng rotor current sa magnetic field ng makina. Ang metalikang kuwintas ay maaaring mathematically na ipinahayag sa mga tuntunin ng electromagnetic na kapangyarihan ng makina:
saan w 1 =2pn 1 /60 - angular frequency ng pag-ikot ng field. Sa turn nito, n 1 =f 1 60/R, pagkatapos
![]()
Palitan sa formula M 1 pagpapahayag REm=Pe2/S at, hinahati sa 9.81, nakukuha natin ang:
![]()
Induction Motor Torque Equation
Sinusunod nito na ang metalikang kuwintas ng motor ay proporsyonal sa mga pagkalugi ng kuryente sa rotor. Palitan sa huling formula ang kasalukuyang halaga ako 2 ’ :
nakuha namin ang equation para sa metalikang kuwintas ng isang induction motor:
saan U 1 - phase boltahe ng stator winding.
29 .Katangian ng makina ng motor ay tinatawag na dependence ng rotor speed sa torque sa shaft n = f (M2). Dahil ang idle torque ay maliit sa ilalim ng load, pagkatapos ay M2 ≈ M at ang mekanikal na katangian ay kinakatawan ng dependence n = f (M). Kung isasaalang-alang natin ang relasyon s = (n1 - n) / n1, kung gayon ang mekanikal na katangian ay maaaring makuha sa pamamagitan ng paglalahad ng graphical dependence nito sa mga coordinate n at M (Fig. 1).
kanin. 1. Mechanical na katangian ng asynchronous na motor
Natural na mekanikal na katangian ng isang induction motor tumutugma sa pangunahing (pasaporte) circuit ng pagsasama nito at ang mga nominal na parameter ng boltahe ng supply. Mga artipisyal na katangian ay nakuha kung ang anumang karagdagang mga elemento ay kasama: resistors, reactors, capacitors. Kapag ang motor ay binibigyan ng isang hindi na-rate na boltahe, ang mga katangian ay naiiba din sa natural na mekanikal na katangian.
Ang mga mekanikal na katangian ay isang napaka-maginhawa at kapaki-pakinabang na tool sa pagsusuri ng static at dynamic na mga mode ng electric drive.
30 Katangiang mekanikal at regulasyon sa sarili ng motor. Ang graph na nag-uugnay sa mga mekanikal na dami - bilis at metalikang kuwintas - ay tinatawag na mekanikal na katangian ng isang induction motor (Larawan 7) n = ƒ(M). Ang self-regulation ng isang asynchronous na motor ay ang mga sumusunod. Hayaang gumana nang tuluy-tuloy ang makina sa ilang mode, pagbuo ng bilis n1 at torque M1. Sa pare-parehong pag-ikot, ang sandaling ito ay katumbas ng braking torque M t1, ibig sabihin. M1=M t 1, n1= conset. Ang pagtaas ng braking torque sa M2 ay magdudulot ng pagbaba sa bilis ng makina, dahil ang braking torque ay magiging mas malaki kaysa sa torque. Sa isang pagbawas sa bilis, ang pagtaas ng slip, na nagiging sanhi ng pagtaas sa EMF at kasalukuyang sa rotor. Pinatataas nito ang metalikang kuwintas ng makina. Ang prosesong ito ay nagtatapos kapag ang torque M2 na binuo ng makina ay naging katumbas ng M t 2. Sa kasong ito, ang bilis ng pag-ikot ay nakatakdang mas mababa sa n1. Ang pag-aari ng awtomatikong ekwilibriyo sa pagitan ng pagpepreno at metalikang kuwintas ay tinatawag regulasyon sa sarili.
Sa isang laboratory stand, ang makina ay puno ng isang electric brake, na binubuo ng isang electromagnet, sa puwang kung saan ang isang disc ay umiikot, na nakatanim sa baras ng makina. Sa pamamagitan ng pagbabago ng boltahe na nagbibigay ng electromagnet coil na may hawakan ng autotransformer, posible na baguhin ang puwersa ng pagpepreno, ang sandali kung saan ay: M TORM \u003d F r (N m)
kung saan ang F ay ang puwersa (force) na kumikilos sa circumference ng pulley, (N);
r - pulley radius, katumbas ng 0.18 m. Kapaki-pakinabang na kapangyarihan sa motor shaft:
saan n- bilis ng pag-ikot ng engine, rpm.
kung saan ƒ - dalas ng network (katumbas ng 50 Hz),
R- bilang ng mga pares ng mga pole ng stator winding (katumbas ng 2).
n 1 - kasabay na bilis ng umiikot na magnetic field.
Ang bilis ng engine ay tinutukoy gamit ang isang tachometer. Ang slip ay kinakalkula ng formula:
31 Mga katangian ng pagpapatakbo tinatawag nila ang mga dependences ng kapangyarihan na natupok ng makina, ang natupok na kasalukuyang I, power factor, bilis ng engine, kahusayan at metalikang kuwintas M sa kapaki-pakinabang na kapangyarihan ng makina na ibinigay sa baras. Tinutukoy ng mga katangian ng pagganap ang mga pangunahing katangian ng pagganap ng isang induction motor. Ang mga katangian ng pagganap ng isang medium power induction motor ay ipinapakita sa fig. 8.8. Ang kanilang pag-uugali ay ipinaliwanag tulad ng sumusunod. Sa magaan na pag-load, ang motor current I (no-load current) ay maaaring nasa pagitan ng 20% at 70% ng rate na kasalukuyang. Habang tumataas ang load, tumataas ang kasalukuyang nasa rotor circuit, na humahantong sa halos proporsyonal na pagtaas ng kasalukuyang ako sa stator circuit.
Fig.8.8 Torque ng motor () ay halos proporsyonal din sa pagkarga, ngunit sa matataas na pagkarga, ang linearity ng graph ay medyo nalabag sa pamamagitan ng pagbawas sa bilis ng makina. Ang katangian ng pagganap ay nagpapahayag ng kaugnayan sa pagitan ng kapangyarihan na binuo ng motor at ang phase shift sa pagitan ng kasalukuyang stator at boltahe. Ang isang asynchronous na motor, tulad ng isang transpormer, ay kumokonsumo ng isang kasalukuyang I mula sa network, na kung saan ay makabuluhang wala sa phase na may inilapat na boltahe. Halimbawa, sa idle mode. Sa pagtaas ng pagkarga sa motor shaft, ang mga aktibong bahagi ng rotor at stator currents ay tumataas, tumataas . Ang maximum na halaga ay naabot sa .
Sa karagdagang pagtaas, ang halaga ay bababa nang bahagya. Ito ay dahil sa pagtaas ng slip s, na nagiging sanhi ng pagtaas ng reactance ng rotor winding, at, dahil dito, ang phase shift . MULA SA tumataas at tumataas, i.e. bababa.
Ang pag-uugali ng katangian ng pagpapatakbo ay ipinaliwanag tulad ng sumusunod. Ang halaga ng kahusayan ay tinutukoy ng ratio ng kapaki-pakinabang na kapangyarihan sa kapangyarihan na natupok mula sa network.
Ang halaga ay tinatawag na pagkawala ng kuryente. Bilang karagdagan sa mga pagkalugi sa bakal ng stator at rotor dahil sa magnetization reversal at eddy currents, na, kasama ang mekanikal na pagkalugi, ay maaaring ituring na pare-pareho, may mga pagkalugi sa tanso sa isang asynchronous na motor. ,
mga. sa stator at rotor windings, na proporsyonal sa parisukat ng kasalukuyang dumadaloy at samakatuwid ay nakasalalay sa pagkarga. Sa panahon ng kawalang-ginagawa, tulad ng sa isang transpormer, ang mga pagkalugi sa bakal ay nangingibabaw, dahil, at katumbas ng walang-load na kasalukuyang, na maliit. Sa maliit na pagkarga sa baras, ang mga pagkalugi sa tanso ay nananatiling maliit, at samakatuwid ang kahusayan ay tinutukoy ng formula ![]() (8.5)
(8.5)
tumataas nang husto sa una. Kapag ang mga nakapirming pagkalugi ay naging katumbas ng mga pagkalugi na umaasa sa pagkarga , kahusayan umabot sa pinakamataas na halaga nito. Sa isang karagdagang pagtaas sa pag-load, ang mga variable na pagkawala ng kapangyarihan ay tumaas nang malaki, bilang isang resulta kung saan ang kahusayan kapansin-pansing bumababa. Ang kalikasan ng pagkagumon ) maaaring ipaliwanag mula sa kaugnayan . Kung ang kahusayan ay pare-pareho, pagkatapos ay magkakaroon ng isang linear na relasyon sa pagitan ng at. Ngunit dahil ang kahusayan depende sa at ang pag-asa na ito sa simula ay tumataas nang husto, at sa karagdagang pagtaas sa pagkarga ay bahagyang nagbabago, pagkatapos ay ang curve ) unang tumataas nang dahan-dahan, at pagkatapos ay tumataas nang husto.
32 Sa anumang de-koryenteng circuit, ang kabuuan ng mga kapangyarihan ng lahat ng pinagmumulan ng elektrikal na enerhiya ay dapat na katumbas ng kabuuan ng mga kapangyarihan ng lahat ng mga receiver at pantulong na elemento. Ang pagkakaroon ng dati nang nakuha ang mga expression ng kapangyarihan, posible na isulat sa isang pangkalahatang anyo ang equation ng balanse ng kapangyarihan para sa anumang electrical circuit:
Σ E → ako → + Σ U ← ako → = Σ E ← ako → + Σ U → ako → + Σ ako 2 r.
Ang equation (1.35) ay maaaring isulat pareho para sa mga tunay na EMF na direksyon, boltahe at agos, at para sa kaso kapag ang ilan sa mga ito ay arbitraryong pinili ng mga positibong direksyon. Sa unang kaso, ang lahat ng mga termino sa loob nito ay magiging positibo at ang mga kaukulang elemento ng circuit ay talagang mga mapagkukunan o mga tatanggap ng elektrikal na enerhiya. Kung, sa kabilang banda, ang ilang mga termino ay isinulat na may kinalaman sa arbitraryong napiling positibong direksyon, ang mga kaukulang elemento ay dapat ituring bilang nilalayong mga mapagkukunan at tatanggap. Bilang resulta ng pagkalkula o pagsusuri, ang ilan sa mga ito ay maaaring maging negatibo. Nangangahulugan ito na ang ilan sa mga dapat na pinagmumulan ay talagang isang lababo, at ang ilan sa mga dapat na lababo ay isang pinagmumulan.
33 Pagsisimula ng isang asynchronous na motor ay sinamahan ng isang lumilipas na proseso ng makina na nauugnay sa paglipat ng rotor mula sa isang estado ng pahinga sa isang estado ng pare-parehong pag-ikot, kung saan binabalanse ng metalikang kuwintas ng makina ang sandali ng mga puwersa ng paglaban sa baras ng makina. Kapag nagsisimula ng isang asynchronous na motor, mayroong isang pagtaas ng pagkonsumo ng elektrikal na enerhiya mula sa network ng supply, na ginugol hindi lamang sa pagtagumpayan ng braking torque na inilapat sa baras at sumasakop sa mga pagkalugi sa asynchronous na motor mismo, kundi pati na rin sa pakikipag-usap sa isang tiyak na kinetic energy sa mga gumagalaw na bahagi ng production unit. Samakatuwid, kapag nagsisimula, ang isang asynchronous na motor ay dapat bumuo ng isang mas mataas na metalikang kuwintas. Para sa asynchronous motor na may isang phase rotor ang paunang panimulang metalikang kuwintas, na tumutugma sa slip sp = 1, ay nakasalalay sa mga aktibong resistensya ng mga adjustable na resistors na ipinakilala sa rotor circuit.
kanin. 1. Pagsisimula ng isang three-phase asynchronous motor na may isang phase rotor: a - mga graph ng pagtitiwala ng metalikang kuwintas ng motor na may isang phase rotor sa slip sa iba't ibang mga aktibong resistensya ng mga resistors sa rotor circuit, b - diagram ng pagsasama ng resistors at acceleration closing contact sa rotor circuit. Kaya, na may saradong acceleration contact na U1, U2, ibig sabihin, kapag nagsisimula ng isang asynchronous na motor na may mga short-circuited contact ring, ang paunang panimulang torque Mp1 = (0.5 -1.0) Mnom, at ang paunang panimulang kasalukuyang Ip = (4.5 - 7) Inom at higit pa. Ang isang maliit na paunang panimulang torque ng isang asynchronous na de-koryenteng motor na may isang phase rotor ay maaaring hindi sapat upang himukin ang yunit ng produksyon at pagkatapos ay mapabilis ito, at ang isang makabuluhang panimulang kasalukuyang ay magdudulot ng pagtaas ng pag-init ng mga windings ng motor, na naglilimita sa dalas ng pag-on nito. , at sa mga network na may mababang kapangyarihan ay humahantong sa hindi kanais-nais na operasyon ng iba pang mga receiver pansamantalang pagbaba ng boltahe. Ang mga pangyayaring ito ay maaaring ang dahilan na hindi kasama ang paggamit ng mga asynchronous na motor na may isang phase rotor na may malaking panimulang kasalukuyang upang magmaneho ng mga gumaganang mekanismo. Ang pagpapakilala ng mga adjustable resistors, na tinatawag na panimulang resistors, sa motor rotor circuit ay hindi lamang binabawasan ang paunang panimulang kasalukuyang, ngunit sa parehong oras ay pinapataas ang paunang panimulang metalikang kuwintas, na maaaring maabot ang maximum na metalikang kuwintas Mmax (Larawan 1, a, curve 3 ), kung ang kritikal na slip ng motor na may isang phase rotor ay sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, kung saan ang Rd" ay ang aktibong paglaban ng risistor na matatagpuan sa yugto ng ang motor rotor winding, nabawasan sa phase ng stator winding. Ang karagdagang pagtaas sa aktibong paglaban ng panimulang risistor ay hindi praktikal, dahil humahantong ito sa isang pagpapahina ng paunang panimulang metalikang kuwintas at ang paglabas ng pinakamataas na punto ng metalikang kuwintas sa slip region s > 1, na hindi kasama ang posibilidad ng pagpabilis ng rotor. Ang kinakailangang aktibong paglaban ng mga resistors para sa pagsisimula ng isang motor na may isang phase rotor ay tinutukoy batay sa mga kinakailangan ng pagsisimula, na maaaring maging madali kapag Mp = (0.1 - 0.4) Mnom, normal kung Mp - (0.5 - 0.75) Mnom, at mabigat sa Mp ≥ Mnom. Upang mapanatili ang isang sapat na malaking metalikang kuwintas ng motor na may isang phase rotor sa panahon ng pagpabilis ng yunit ng produksyon upang mabawasan ang tagal ng lumilipas na proseso at bawasan ang pag-init ng motor, kinakailangan na unti-unting bawasan ang aktibong paglaban ng panimulang mga resistor. Ang pinahihintulutang pagbabago ng torque sa panahon ng acceleration M(t) ay tinutukoy ng mga kondisyong elektrikal at mekanikal na naglilimita sa pinakamataas na limitasyon ng torque M > 0.85 Mmax, ang switching moment M2 > > Ms (Fig. 2), pati na rin ang acceleration.
kanin. 2. Mga panimulang katangian ng isang three-phase asynchronous na motor na may isang phase rotor. Ang paglipat ng mga panimulang resistor ay ibinibigay ng sunud-sunod na pag-on ng mga contactor ng acceleration Y1, Y2, ayon sa pagkakabanggit, sa mga oras na t1, t2, binibilang mula sa sandaling nagsimula ang makina, kapag sa panahon ng pagpabilis ang metalikang kuwintas M ay nagiging katumbas ng sandali ng paglipat M2. Dahil dito, sa buong start-up, ang lahat ng peak torque ay pareho at lahat ng switching torques ay pantay sa isa't isa. Dahil ang metalikang kuwintas at kasalukuyang ng isang asynchronous na motor na may isang phase rotor ay magkaugnay, posibleng itakda ang peak current limit I1 \u003d (1.5 - 2.5) Inom at ang switching current I2 sa panahon ng acceleration ng rotor, na dapat magbigay ang switching moment M2\u003e Mc. Ang pagdiskonekta ng mga asynchronous na motor na may isang phase rotor mula sa supply network ay palaging ginagawa sa rotor circuit na short-circuited, upang maiwasan ang mga overvoltage sa mga phase ng stator winding, na maaaring lumampas sa rated boltahe ng mga phase na ito ng 3-4 beses kung ang rotor circuit ay bukas sa sandaling naka-off ang makina.
34 Regulasyon ng dalas. Ang pamamaraang ito ng kontrol sa bilis ay nagbibigay-daan sa paggamit ng pinaka maaasahan at pinakamurang mga asynchronous na motor na may rotor na squirrel-cage. Gayunpaman, upang baguhin ang dalas ng boltahe ng supply, kinakailangan ang isang variable frequency na pinagmumulan ng electric current. Bilang huli, ang alinman sa mga kasabay na generator na may variable na bilis ay ginagamit, o ang mga frequency converter - electric o static, na ginawa sa kinokontrol na mga balbula ng semiconductor (thyristors). Sa kasalukuyan, ang mga frequency converter ay may medyo kumplikadong circuit at medyo mataas ang gastos. Gayunpaman, ang mabilis na pag-unlad ng teknolohiya ng power semiconductor ay nagpapahintulot sa amin na umasa para sa karagdagang pagpapabuti ng mga frequency converter, na nagbubukas ng mga prospect para sa malawakang paggamit ng frequency regulation. Ang isang detalyadong paglalarawan ng mga batas ng kontrol para sa regulasyon ng dalas at isang pagsusuri sa pagpapatakbo ng isang asynchronous na motor kapag pinalakas ng isang frequency converter ay ibinibigay sa § 4.13 at 4.14. Regulasyon sa pamamagitan ng pagpapalit ng bilang ng mga poste. Ang regulasyong ito ay nagpapahintulot sa iyo na makakuha ng isang hakbang na pagbabago sa bilis. Sa fig. Ipinapakita ng 4.35 ang pinakasimpleng circuit (para sa isang yugto), na nagpapahintulot sa iyo na baguhin ang bilang ng mga pole ng stator winding nang dalawang beses. Upang gawin ito, ang bawat yugto ng paikot-ikot na stator ay nahahati sa dalawang bahagi, na inililipat mula sa serye na koneksyon sa parallel. Makikita sa pigura na kapag ang mga coils 1-2 at 3-4 ay nakabukas sa dalawang parallel na sanga, ang bilang ng mga pole ay nahahati, at, dahil dito, ang dalas ng pag-ikot ng magnetic field ay nadoble. Kapag lumilipat, ang bilang ng mga pagliko na konektado sa serye sa bawat yugto ay hinahati, ngunit dahil dumoble ang bilis ng pag-ikot, ang EMF na na-induce sa bahagi ay nananatiling hindi nagbabago. Samakatuwid, ang motor sa parehong bilis ay maaaring konektado sa network na may parehong boltahe. Upang hindi lumipat sa rotor winding, ang huli ay ginanap short-circuited. Kung kailangan mong magkaroon ng tatlo o apat na bilis, pagkatapos ay ang isa pang paikot-ikot ay inilalagay sa stator, sa pamamagitan ng paglipat kung saan maaari kang makakuha ng karagdagang dalawang frequency. Ang mga induction motor na nagpapalit ng poste ay tinatawag multi-bilis. Regulasyon sa pamamagitan ng pagsasama ng isang rheostat sa rotor circuit. Kapag ang mga karagdagang aktibong resistensya ay kasama sa rotor circuit R ext1 , R ext2 , R add3 at iba pa ay nagbabago sa anyo ng dependency M = (mga) f at mekanikal na katangian n 2 = f(M) engine (Larawan 4.37, a). Kasabay nito, ilang sandali ng pag-load M n match slip s 1 , s 2 , s 3 , ..., mas malaki kaysa sa mga slip s e , kapag ang makina ay tumatakbo sa isang natural na katangian (kapag R ext = 0). Samakatuwid, ang steady-state na bilis ng engine ay bumababa mula sa n e dati P 1 P 2 , P 3 ,... (Larawan 4.37, b). Ang paraan ng kontrol na ito ay maaari lamang gamitin para sa mga motor na slip-ring. Pinapayagan ka nitong maayos na baguhin ang bilis sa isang malawak na hanay. Ang mga disadvantage nito ay: a) malaking pagkawala ng enerhiya sa control rheostat; b) labis na "malambot" na mga mekanikal na katangian ng makina na may mataas na pagtutol sa rotor circuit. Sa ilang mga kaso, ang huli ay hindi katanggap-tanggap, dahil ang isang maliit na pagbabago sa metalikang kuwintas ng pagkarga ay tumutugma sa isang makabuluhang pagbabago sa bilis.
35 Asynchronous generator- ito ay isang asynchronous electric machine (el. engine) na tumatakbo sa generator mode. Sa tulong ng isang drive motor (sa aming kaso, isang wind turbine), ang rotor ng isang asynchronous electric generator ay umiikot sa parehong direksyon tulad ng magnetic field. Sa kasong ito, ang slip ng rotor ay nagiging negatibo, ang isang braking torque ay lilitaw sa baras ng asynchronous machine, at ang generator ay naglilipat ng enerhiya sa network. Upang pukawin ang electromotive force sa output circuit nito, ginagamit ang natitirang magnetization ng rotor. Para dito, ginagamit ang mga capacitor. Ang mga asynchronous na generator ay hindi madaling kapitan ng mga short circuit. Ang isang asynchronous generator ay mas simple kaysa sa isang kasabay (halimbawa, isang generator ng kotse): kung ang huli ay may mga inductors na nakalagay sa rotor, kung gayon ang rotor ng asynchronous generator ay mukhang isang maginoo na flywheel. Ang ganitong generator ay mas mahusay na protektado mula sa dumi at kahalumigmigan, mas lumalaban sa mga maikling circuit at labis na karga, at ang output boltahe ng isang asynchronous generator ay may mas mababang antas ng non-linear distortion. Ito ay nagpapahintulot sa iyo na gumamit ng mga asynchronous na generator hindi lamang sa pagpapagana ng mga pang-industriya na aparato na hindi kritikal sa hugis ng input boltahe, kundi pati na rin upang ikonekta ang mga elektronikong kagamitan. Ito ay isang asynchronous electric generator na isang mainam na mapagkukunan ng kasalukuyang para sa mga device na may aktibong (ohmic) na load: mga electric heater, welding converter, incandescent lamp, electronic device, computer at radio engineering. Mga pakinabang ng isang asynchronous generator . Kasama sa mga bentahe na ito ang isang mababang malinaw na kadahilanan (harmonic coefficient), na nagpapakilala sa dami ng presensya ng mas mataas na harmonika sa output boltahe ng generator. Ang mas mataas na mga harmonika ay nagdudulot ng hindi pantay na pag-ikot at walang silbi na pag-init ng mga de-koryenteng motor. Ang mga kasabay na generator ay maaaring magkaroon ng isang malinaw na kadahilanan ng hanggang sa 15%, at ang malinaw na kadahilanan ng isang asynchronous na generator ay hindi lalampas sa 2%. Kaya, ang isang asynchronous electric generator ay gumagawa lamang ng kapaki-pakinabang na enerhiya. Ang isa pang bentahe ng isang asynchronous generator ay na ito ay ganap na kulang sa umiikot na paikot-ikot at mga elektronikong bahagi na sensitibo sa mga panlabas na impluwensya at kadalasang madaling masira. Samakatuwid, ang asynchronous generator ay hindi napapailalim sa pagkasira at maaaring maglingkod nang napakatagal. Ang output ng aming mga generator ay agad na 220/380V AC, na maaaring magamit nang direkta sa mga gamit sa sambahayan (halimbawa, mga heater), upang mag-charge ng mga baterya, upang kumonekta sa isang sawmill, at para rin sa parallel na operasyon sa isang tradisyunal na network. Sa kasong ito, babayaran mo ang pagkakaiba na nakonsumo mula sa network at nabuo ng windmill. kasi Dahil ang boltahe ay dumarating kaagad sa mga parameter ng industriya, kung gayon hindi mo kakailanganin ang iba't ibang mga converter (inverters) kapag ang wind generator ay direktang konektado sa iyong load. Halimbawa, maaari kang direktang kumonekta sa isang sawmill at, sa pagkakaroon ng hangin, gumana na parang nakakonekta ka lang sa isang 380V network. Tulad ng alam mo, upang mabawasan ang oras ng pagpepreno kapag huminto sa mga makina at mekanismo ng produksyon, madalas na ginagamit ang mga mekanikal na preno. Ang pagbawas sa oras ng pagpepreno, lalo na sa kaso ng isang maikling cycle ng trabaho, ay humahantong sa isang makabuluhang pagtaas sa produktibidad ng mga makina at mekanismo. Ang mga disadvantages ng mga mekanikal na preno ay ang mabilis na pagsusuot ng mga gasgas na ibabaw, ang pagiging kumplikado at pangangailangan para sa pana-panahong pagsasaayos ng puwersa ng pagpepreno, ang pangangailangan para sa karagdagang puwang para sa paglalagay ng preno at ang koneksyon nito sa mekanismo. Ang lahat ng mga sagabal sa itaas ay tinanggal kung, para sa ipinahiwatig na mga layunin, sa halip na isang mekanikal na preno, ang mga katangian ng mga de-koryenteng motor ay ginagamit upang gumana sa mga mode ng pagpepreno, iyon ay, upang gumana bilang isang generator at hindi bumuo ng isang metalikang kuwintas, ngunit isang braking torque. Sa maraming mga hoisting at transport machine (crane, elevator, escalator, atbp.), Kung saan posible ang paggalaw sa ilalim ng impluwensya ng gravity, ang isang pare-pareho, tuluy-tuloy na rate ng pagpapababa ng mga load ay sinisiguro gamit ang braking torque ng electric motor. Ang mga DC motor ay maaaring gumana sa tatlong mga mode ng pagpepreno:
Sa mode ng pagsalungat;
Sa generator mode na may output ng enerhiya sa network;
Sa dynamic na braking mode.
Sa alinman sa mga mode ng pagpepreno, ang de-koryenteng motor ay gumagana bilang isang generator, nagko-convert, halimbawa, ang kinetic energy ng mga gumagalaw na bahagi o ang potensyal na enerhiya ng isang pababang load sa elektrikal na enerhiya.
36 Kapag ang makina ay binaligtad sa paggalaw sa pamamagitan ng paglipat ng switch, ang pagpepreno ay unang nangyayari mula sa isang ibinigay na bilis hanggang sa zero, at pagkatapos ay acceleration sa kabilang direksyon. Ang ganitong pagpepreno ay maaari ding gamitin para sa pagpepreno sa panahon ng tinatawag na pagsalungat. Sa panahon ng pagbaliktad o pagpepreno na ito, ang isang squirrel-cage induction motor ay may malalaking alon. Samakatuwid, batay sa mga kondisyon ng pag-init para sa mga makinang ito, ang bilang ng mga pagbabalik sa bawat oras ay hindi hihigit sa sampu. Upang limitahan ang mga alon at dagdagan ang mga torque, ang paglaban ay ipinakilala sa phase rotor circuit ng isang asynchronous na motor. Isaalang-alang natin ang tatlong pangunahing paraan ng electric braking ng mga asynchronous na motor. Pagpepreno sa pamamagitan ng oposisyon, gaya ng ipinahiwatig, ito ay ginagawa kapag ang makina ay inililipat on the go. Sa kasong ito, ang magnetic field ay umiikot sa kabaligtaran na direksyon na may kaugnayan sa direksyon ng pag-ikot ng motor, at ang metalikang kuwintas ng motor ay pagpepreno - ito ay kumikilos laban sa direksyon ng pag-ikot. Pagpepreno ng generator nagaganap kapag lumilipat ng isang multi-speed engine sa paglipat mula sa isang mas mataas na bilis sa isang mas mababang isa, i.e. kapag inililipat ang makina mula sa mas maliit na bilang ng mga pole patungo sa mas malaki. Sa unang sandali ng paglipat, ang bilis ng engine ay lumalabas na mas malaki kaysa sa bilis ng field nito, ibig sabihin, ang slip ay lumalabas na negatibo at ang makina ay lumipat sa generator mode. Ang pagpepreno ay nangyayari sa conversion ng kinetic energy ng mga umiikot na bahagi sa elektrikal na enerhiya, na kung saan, minus ang mga pagkalugi sa makina, ay ibinibigay sa network. Ang generator braking ay maaari ding nasa elevator kapag nagpapababa ng mabigat na karga, na nagpapabilis sa makina sa bilis na lampas sa kasabay; pagkatapos ay magsisimulang ibigay ng makina sa network ang enerhiya na ibinibigay dito ng pababang pagkarga. Ang generator braking ay posible lamang sa oversynchronous na bilis. Kung ang makina ay dapat na huminto sa dulo ng pagpepreno, pagkatapos ay sa pagtatapos ng pagpepreno, ang isa ay dapat lumipat sa mekanikal na pagpepreno o sa isa pang uri ng electric braking (dynamic, counter-switching). Ang pag-aayos ng posisyon sa dulo, kung kinakailangan, ay isinasagawa lamang sa tulong ng isang mekanikal na preno. Sa dynamic na pagpepreno ang motor stator winding ay naka-disconnect mula sa three-phase network at nakakonekta sa DC o single-phase AC network. Sa kasong ito, posible ang iba't ibang paraan ng pagkonekta sa mga phase ng stator winding. Ang paikot-ikot na stator, na pinapagana ng direktang kasalukuyang, ay lumilikha ng isang nakatigil na magnetic field. Tulad ng sa normal na operasyon ng makina, ang umiikot na field nito ay hinihila ang rotor kasama nito, ang isang nakatigil na field sa panahon ng dynamic na pagpepreno ay nagiging sanhi ng mabilis na paghinto ng rotor. Ang kinetic energy ng mga umiikot na bahagi ay na-convert sa init na inilabas sa rotor circuit dahil sa mga alon na na-induce dito ng fixed stator field. Ang kinis ng pagpepreno ay tinitiyak sa pamamagitan ng pag-regulate ng boltahe sa mga terminal ng stator. Ang braking torque ng motor na may phase rotor ay maaari ding i-regulate ng isang rheostat sa rotor circuit. Ang kawalan ng dynamic na pagpepreno ay ang pangangailangan para sa isang mababang boltahe na mapagkukunan ng DC.
37 Kasabay na makina- ito ay isang AC electric machine, ang bilis ng rotor na kung saan ay katumbas ng dalas ng pag-ikot ng magnetic field sa air gap. Ang mga pangunahing bahagi ng isang kasabay na makina ay ang armature at ang inductor. Ang pinakakaraniwang disenyo ay isa kung saan ang armature ay matatagpuan sa stator, at mayroong isang inductor sa rotor na pinaghihiwalay mula dito ng isang air gap. Ang armature ay isa o higit pang AC windings. Sa mga motor, ang mga alon na ibinibigay sa armature ay lumilikha ng isang umiikot na magnetic field na nagsasama sa larangan ng inductor, at sa gayon ang enerhiya ay na-convert. Ang armature field ay nakakaapekto sa field ng inductor at samakatuwid ay tinatawag din anchor reaction field. Sa mga generator, ang field ng reaksyon ng armature ay nilikha sa pamamagitan ng mga alternating currents na sapilitan sa armature winding mula sa inductor. Ang inductor ay binubuo ng mga pole - DC electromagnets o permanenteng magnet (sa micromachines). May dalawang magkaibang disenyo ang mga synchronous machine inductors: salient pole o non-salient pole. Ang isang salient pole machine ay nakikilala sa pamamagitan ng katotohanan na ang mga pole ay binibigkas at may disenyo na katulad ng mga pole ng isang DC machine. Sa isang implicit na disenyo ng poste, ang excitation winding ay umaangkop sa mga grooves ng inductor core, na halos kapareho sa winding ng mga rotors ng mga asynchronous na makina na may phase rotor, na ang pagkakaiba lamang ay ang isang puwang na natitira sa pagitan ng mga pole na hindi napuno ng mga konduktor (ang tinatawag na malaking ngipin). Ang mga non-salient pole na disenyo ay ginagamit sa mga high-speed machine upang bawasan ang mekanikal na pagkarga sa mga pole. Upang mabawasan ang magnetic resistance, iyon ay, upang mapabuti ang pagpasa ng magnetic flux, ginagamit ang mga ferromagnetic core ng rotor at stator. Karaniwan, ang mga ito ay isang nakalamina na de-koryenteng istraktura ng bakal (iyon ay, binuo mula sa magkahiwalay na mga sheet). Ang bakal na elektrikal ay may isang bilang ng mga kagiliw-giliw na katangian. Sa partikular, mayroon itong mataas na nilalaman ng silikon upang mapataas ang resistensya ng kuryente nito at sa gayon ay mabawasan ang mga eddy currents.
Pinapayuhan ka naming basahin
 Mga sikolohikal na katangian ng mga bata sa pagdadalaga
Mga sikolohikal na katangian ng mga bata sa pagdadalaga Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan
Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan, diagnosis, paggamot Paggamot ng urogenital chlamydia") Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia
Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano

