Para sa dami ng metalikang kuwintas induction motor ang phase shift sa pagitan ng kasalukuyang I 2 at e ay may malaking impluwensya. d.s. E 2S rotor.
Isaalang-alang ang kaso kapag ang inductance ng rotor winding ay maliit at samakatuwid ang phase shift ay maaaring mapabayaan (Fig. 223, a).
Ang umiikot na magnetic field ng stator ay pinalitan dito ng field ng N at S pole, umiikot, sabihin natin, sa isang clockwise na direksyon. Gamit ang panuntunan ng kanang kamay, tinutukoy natin ang direksyon e. d.s. at mga alon sa rotor winding. Ang mga rotor na alon, na nakikipag-ugnayan sa isang umiikot na magnetic field, ay lumikha ng isang metalikang kuwintas. Ang mga direksyon ng mga puwersang kumikilos sa kasalukuyang nagdadala ng mga conductor ay tinutukoy ng kaliwang tuntunin. Tulad ng makikita mula sa pagguhit, ang rotor sa ilalim ng pagkilos ng mga puwersa ay iikot sa parehong direksyon tulad ng umiikot na patlang mismo, iyon ay, clockwise.
Isaalang-alang ang pangalawang kaso, kapag ang inductance ng rotor winding ay malaki. Sa kasong ito, ang phase shift sa pagitan ng rotor kasalukuyang I 2 at e. d.s. magiging malaki rin ang rotor E 2S. Sa FIG. 223, b, ang magnetic field ng stator ng isang induction motor ay ipinapakita pa rin sa anyo ng clockwise rotating pole N at S. Ang direksyon ng e. d.s. nananatiling pareho sa Fig. 223, a, ngunit dahil sa pagkaantala ng kasalukuyang sa phase, ang axis magnetic field ang rotor ay hindi na magkakasabay sa neutral na linya ng stator field, ngunit lilipat ng ilang anggulo laban sa pag-ikot ng magnetic field. Ito ay hahantong sa katotohanan na kasama ang pagbuo ng isang metalikang kuwintas na nakadirekta sa isang direksyon, ang ilang mga konduktor ay lilikha ng isang kabaligtaran na metalikang kuwintas.
Ito ay makikita mula dito na ang kabuuang metalikang kuwintas ng motor sa panahon ng isang phase shift sa pagitan ng kasalukuyang at e. d.s. ang rotor ay mas maliit kaysa sa kaso kapag ang I 2 at E 2S ay nasa phase. Mapapatunayan na ang metalikang kuwintas ng isang induction motor ay tinutukoy lamang ng aktibong bahagi ng rotor current, i.e. kasalukuyang I 2 cos at maaari itong kalkulahin ng formula:
Ф m - stator magnetic flux (at humigit-kumulang katumbas din ng nagresultang magnetic flux ng induction motor);
Anggulo ng phase sa pagitan ng e. d.s. at paikot-ikot na bahagi ng kasalukuyang
Ang C ay isang pare-parehong koepisyent.
Pagkatapos ng pagpapalit:
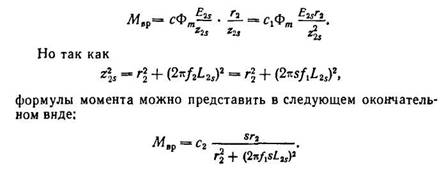
Mula sa huling expression makikita na ang metalikang kuwintas ng induction motor ay nakasalalay sa slip.
Sa FIG. Ang 224 ay nagpapakita ng curve A ng motor torque versus slip. Ito ay makikita mula sa kurba na sa sandali ng pagsisimula, kapag s=l at n = 0, ang motor torque ay maliit. Ito ay ipinaliwanag sa pamamagitan ng ang katunayan na sa sandali ng pagsisimula, ang dalas ng kasalukuyang sa rotor winding ay ang pinakamataas at ang inductive resistance ng winding ay malaki. Bilang resulta, ang cos ay may maliit na halaga (dahil
|
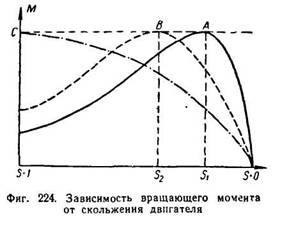
hilera 0.1-0.2). Samakatuwid, kahit na ang panimulang kasalukuyang ay malaki, ang panimulang metalikang kuwintas ay magiging maliit.
Sa ilang slip S 1, ang motor torque ay magkakaroon ng pinakamataas na halaga. Sa karagdagang pagbaba sa slip, o, sa madaling salita, na may karagdagang pagtaas sa bilis ng pag-ikot ng makina, ang metalikang kuwintas nito ay mabilis na bababa.
Upang magsuray-suray at kapag dumudulas s = 0, ang torque ng makina ay magiging katumbas din ng zero.
Dapat pansinin na sa isang asynchronous na motor, ang isang slip na katumbas ng zero ay hindi maaaring umiiral. Ito ay posible lamang kung ang rotor ay panlabas na ibinibigay sa isang metalikang kuwintas sa direksyon ng pag-ikot ng stator field.
Pagsisimula ng metalikang kuwintas maaaring tumaas kung, sa sandali ng pagsisimula, ang phase shift sa pagitan ng kasalukuyang at e. d.s. rotor. Mula sa formula
makikita na kung sa isang pare-pareho inductive reactance windings ng rotor upang madagdagan ang aktibong paglaban, pagkatapos ay ang anggulo mismo ay bababa, na hahantong sa katotohanan na ang metalikang kuwintas ng makina ay tataas din. Ginagamit ito sa pagsasanay upang madagdagan ang panimulang metalikang kuwintas ng makina. Sa sandali ng pagsisimula, ang isang aktibong pagtutol (nagsisimulang rheostat) ay ipinakilala sa rotor circuit, na pagkatapos ay aalisin sa sandaling tumaas ang bilis ng makina.
Ang pagtaas ng panimulang torque ay nagiging sanhi ng pinakamataas na metalikang kuwintas ng motor upang makuha ang mas maraming slip (point S 2 ng curve B sa FIG. 224). Sa pamamagitan ng pagtaas ng aktibong paglaban ng rotor circuit sa pagsisimula, posibleng makamit na ang pinakamataas na torque ay sa sandali ng pagsisimula (s = 1 curve C).
Ang metalikang kuwintas ng isang induction motor ay proporsyonal sa parisukat ng boltahe, kaya kahit na ang isang maliit na pagbaba sa boltahe ay sinamahan ng isang matalim na pagbaba sa metalikang kuwintas.
Ang Power P 1 na ibinibigay sa stator winding ng isang induction motor ay katumbas ng:
![]()
kung saan ang m 1 ay ang bilang ng mga phase.
Ang motor stator ay may mga sumusunod na pagkawala ng enerhiya:
1) sa stator winding R es. =m 1 I 1 2 r 1 ;
2) sa stator steel at hysteresis at eddy currents P C .
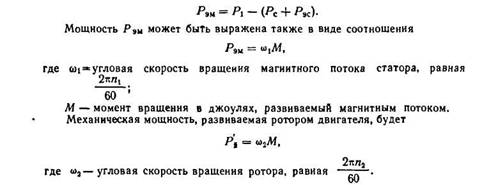
Ang kapangyarihan na ibinibigay sa rotor ay ang kapangyarihan ng umiikot na magnetic field, na tinatawag ding electromagnetic power P eM .
Ang electromagnetic power ay katumbas ng pagkakaiba sa pagitan ng power na ibinibigay sa motor at ang mga pagkalugi sa motor stator, i.e.
|
Ang pagkakaiba sa pagitan ng Р eM at kumakatawan sa mga de-koryenteng pagkalugi sa rotor winding Р eP, kung napapabayaan natin ang mga pagkalugi sa rotor steel dahil sa kanilang kawalang-halaga (ang dalas ng remagnetization ng rotor ay kadalasang napakaliit):
Samakatuwid, ang mga pagkalugi sa rotor winding ay proporsyonal sa slip ng rotor.
Kung mula sa mekanikal na kapangyarihan na binuo ng rotor, ibawas ang mekanikal na pagkalugi R mx dahil sa friction sa rotor bearings, friction sa hangin, atbp., pati na rin ang mga karagdagang pagkalugi R D na nagmumula sa ilalim ng pagkarga at dahil sa rotor stray fields, at mga pagkalugi na dulot ng: magnetic field pulsations sa mga ngipin ng stator at rotor, pagkatapos ay magkakaroon ng kapaki-pakinabang na kapangyarihan sa baras ng motor, na tinutukoy namin ng P 2 .
Ang kahusayan ng isang induction motor ay maaaring matukoy ng formula:

Mula sa huling expression makikita na ang sandali ng pag-ikot ng isang induction motor ay proporsyonal sa produkto ng magnitude ng umiikot na magnetic flux, ang rotor current at ang cosine ng anggulo sa pagitan ng e. d.s. rotor at ang kasalukuyang nito,

Mula sa katumbas na circuit ng isang asynchronous na motor, ang halaga ng pinababang rotor current ay nakuha, na ibinibigay namin nang walang patunay.
Ang sandali na binuo ng motor ay katumbas ng electromagnetic power na hinati sa kasabay na bilis ng pag-ikot ng electric drive.
M \u003d P em / ω 0
Ang electromagnetic power ay ang kapangyarihan na ipinadala sa pamamagitan ng air gap mula sa stator hanggang sa rotor, at ito ay katumbas ng mga pagkalugi sa rotor, na tinutukoy ng formula:
P em \u003d m I 2 2 (r 2 '/s)
m ay ang bilang ng mga phase.
M \u003d M em \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s)
Ang electromechanical na katangian ng isang asynchronous na motor ay ang pag-asa ng I2' sa slip. Pero dahil asynchronous na makina gumagana lamang bilang isang de-koryenteng motor, ang pangunahing katangian ay ang mekanikal na katangian.
M \u003d Me m \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s) - isang pinasimple na pagpapahayag ng mekanikal na katangian.
Ang pagpapalit ng kasalukuyang halaga sa expression na ito, makakakuha tayo ng: M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
Sa halip na ω 0, kailangan mong palitan ang mekanikal na bilis, bilang isang resulta kung saan ang bilang ng mga pares ng poste ay nabawasan.
Ang M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] ay ang equation para sa mekanikal na katangian ng isang induction motor.
Kapag ang induction motor ay napunta sa generator mode, ang bilis ng pag-ikot ω > ω 0 at ang slip ay nagiging negatibo (s Kapag ang slip ay nagbago mula 0 hanggang +∞, ang mode ay tinatawag na "electromagnetic brake mode".
Dahil sa mga halaga ng slip mula o hanggang +∞, nakukuha natin ang katangian:
Kumpletong mekanikal na katangian ng isang asynchronous na motor.
Tulad ng makikita mula sa mekanikal na katangian, mayroon itong dalawang extrema: ang isa sa segment ng slip change sa lugar mula 0 hanggang +∞, ang isa sa segment mula 0 hanggang -∞. dM/ds=0
M max = / ] + ay tumutukoy sa motor mode. - tumutukoy sa generator mode.
M max \u003d M cr M cr - kritikal na sandali.
Ang slip kung saan ang sandali ay umabot sa pinakamataas nito ay tinatawag na critical slip, at ito ay tinutukoy ng formula: s cr = ±
Ang kritikal na slip ay may parehong halaga sa parehong mga mode ng motor at generator.
Ang halaga ng M cr ay maaaring makuha sa pamamagitan ng pagpapalit ng halaga ng critical slip sa moment formula.
Ang sandali kapag ang slip ay katumbas ng 1 ay tinatawag na panimulang metalikang kuwintas. Ang expression para sa panimulang metalikang kuwintas ay maaaring makuha sa pamamagitan ng pagpapalit ng 1 sa formula:
M p \u003d / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
Dahil ang denominator sa formula para sa maximum na sandali ay ilang mga order ng magnitude na mas malaki kaysa sa U f, kaugalian na isaalang-alang ang M kr ≡U f 2 .
Ang kritikal na slip ay nakasalalay sa halaga ng aktibong paglaban ng rotor winding R 2 '. Ang panimulang metalikang kuwintas, tulad ng makikita mula sa formula, ay nakasalalay sa aktibong paglaban ng rotor r 2 '. ang pag-aari na ito ng panimulang metalikang kuwintas ay ginagamit sa mga asynchronous na motor na may isang phase rotor, kung saan ang panimulang metalikang kuwintas ay nadagdagan sa pamamagitan ng pagpapapasok ng aktibong pagtutol sa rotor circuit.
7. Idling transpormer
Ang idle mode ng transpormer ay tinatawag na mode ng operasyon kapag ang isa sa mga windings ng transpormer ay pinalakas mula sa isang mapagkukunan na may alternating boltahe at may bukas na mga circuit ng iba pang mga windings. Ang mode ng operasyon na ito ay maaaring nasa isang tunay na transpormer kapag ito ay konektado sa network, at ang load na pinapakain mula sa pangalawang paikot-ikot nito ay hindi pa naka-on. Sa pamamagitan ng pangunahing paikot-ikot transpormer ay pumasa sa kasalukuyang I 0 , sa parehong oras habang pangalawang paikot-ikot walang kasalukuyang, dahil bukas ang circuit. Ang kasalukuyang I 0 , na dumadaan sa pangunahing paikot-ikot, ay lumilikha ng sinusoidally na nagbabagong tray Ф 0 sa magnetic circuit, na, dahil sa mga pagkalugi ng magnetic, ay nahuhuli sa kasalukuyang nasa phase sa pamamagitan ng isang anggulo ng pagkawala δ. 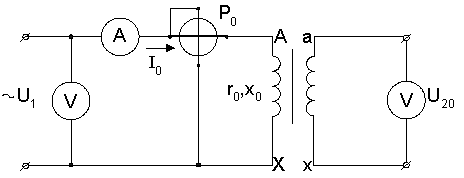
Ang magnitude ng metalikang kuwintas ng isang induction motor ay lubos na naiimpluwensyahan ng phase shift sa pagitan ng kasalukuyang I 2 at e. d.s. E 2S rotor.
Isaalang-alang ang kaso kapag ang inductance ng rotor winding ay maliit at samakatuwid ang phase shift ay maaaring mapabayaan (Fig. 223, a).
Ang umiikot na magnetic field ng stator ay pinalitan dito ng field ng N at S pole, umiikot, sabihin natin, sa isang clockwise na direksyon. Gamit ang panuntunan ng kanang kamay, tinutukoy natin ang direksyon e. d.s. at mga alon sa rotor winding. Ang mga rotor na alon, na nakikipag-ugnayan sa isang umiikot na magnetic field, ay lumikha ng isang metalikang kuwintas. Ang mga direksyon ng mga puwersang kumikilos sa kasalukuyang nagdadala ng mga conductor ay tinutukoy ng kaliwang tuntunin. Tulad ng makikita mula sa pagguhit, ang rotor sa ilalim ng pagkilos ng mga puwersa ay iikot sa parehong direksyon tulad ng umiikot na patlang mismo, iyon ay, clockwise.
Isaalang-alang ang pangalawang kaso, kapag ang inductance ng rotor winding ay malaki. Sa kasong ito, ang phase shift sa pagitan ng rotor kasalukuyang I 2 at e. d.s. magiging malaki rin ang rotor E 2S. Sa FIG. 223, b, ang magnetic field ng stator ng isang induction motor ay ipinapakita pa rin sa anyo ng clockwise rotating pole N at S. Ang direksyon ng e. d.s. nananatiling pareho sa Fig. 223, a, ngunit dahil sa pagkaantala ng phase ng kasalukuyang, ang axis ng magnetic field ng rotor ay hindi na magkakasabay sa neutral na linya ng stator field, ngunit lilipat ng ilang anggulo laban sa pag-ikot ng magnetic field. Ito ay hahantong sa katotohanan na kasama ang pagbuo ng isang metalikang kuwintas na nakadirekta sa isang direksyon, ang ilang mga konduktor ay lilikha ng isang kabaligtaran na metalikang kuwintas.
Ito ay makikita mula dito na ang kabuuang metalikang kuwintas ng motor sa panahon ng isang phase shift sa pagitan ng kasalukuyang at e. d.s. ang rotor ay mas maliit kaysa sa kaso kapag ang I 2 at E 2S ay nasa phase. Mapapatunayan na ang metalikang kuwintas ng isang induction motor ay tinutukoy lamang ng aktibong bahagi ng rotor current, i.e. kasalukuyang I 2 cos at maaari itong kalkulahin ng formula:
Ф m - stator magnetic flux (at humigit-kumulang katumbas din ng nagresultang magnetic flux ng induction motor);
Anggulo ng phase sa pagitan ng e. d.s. at paikot-ikot na bahagi ng kasalukuyang
Ang C ay isang pare-parehong koepisyent.
Pagkatapos ng pagpapalit:
Mula sa huling expression makikita na ang metalikang kuwintas ng induction motor ay nakasalalay sa slip.
Sa FIG. Ang 224 ay nagpapakita ng curve A ng motor torque versus slip. Ito ay makikita mula sa kurba na sa sandali ng pagsisimula, kapag s=l at n = 0, ang motor torque ay maliit. Ito ay ipinaliwanag sa pamamagitan ng ang katunayan na sa sandali ng pagsisimula, ang dalas ng kasalukuyang sa rotor winding ay ang pinakamataas at ang inductive resistance ng winding ay malaki. Bilang resulta, ang cos ay may maliit na halaga (dahil
|
hilera 0.1-0.2). Samakatuwid, kahit na ang panimulang kasalukuyang ay malaki, ang panimulang metalikang kuwintas ay magiging maliit.
Sa ilang slip S 1, ang motor torque ay magkakaroon ng pinakamataas na halaga. Sa karagdagang pagbaba sa slip, o, sa madaling salita, na may karagdagang pagtaas sa bilis ng pag-ikot ng makina, ang metalikang kuwintas nito ay mabilis na bababa.
Upang magsuray-suray at kapag dumudulas s = 0, ang torque ng makina ay magiging katumbas din ng zero.
Dapat pansinin na sa isang asynchronous na motor, ang isang slip na katumbas ng zero ay hindi maaaring umiiral. Ito ay posible lamang kung ang rotor ay panlabas na ibinibigay sa isang metalikang kuwintas sa direksyon ng pag-ikot ng stator field.
Ang panimulang torque ay maaaring tumaas kung, sa sandali ng pagsisimula, ang phase shift sa pagitan ng kasalukuyang at e ay nabawasan. d.s. rotor. Mula sa formula
makikita na kung, na may pare-pareho na inductive resistance ng rotor winding, ang aktibong paglaban ay nadagdagan, kung gayon ang anggulo mismo ay bababa, na hahantong sa katotohanan na ang motor torque ay tataas din. Ginagamit ito sa pagsasanay upang madagdagan ang panimulang metalikang kuwintas ng makina. Sa sandali ng pagsisimula, ang isang aktibong pagtutol (nagsisimulang rheostat) ay ipinakilala sa rotor circuit, na pagkatapos ay aalisin sa sandaling tumaas ang bilis ng makina.
Ang pagtaas ng panimulang torque ay nagiging sanhi ng pinakamataas na metalikang kuwintas ng motor upang makuha ang mas maraming slip (point S 2 ng curve B sa FIG. 224). Sa pamamagitan ng pagtaas ng aktibong paglaban ng rotor circuit sa pagsisimula, posibleng makamit na ang pinakamataas na torque ay sa sandali ng pagsisimula (s = 1 curve C).
Ang metalikang kuwintas ng isang induction motor ay proporsyonal sa parisukat ng boltahe, kaya kahit na ang isang maliit na pagbaba sa boltahe ay sinamahan ng isang matalim na pagbaba sa metalikang kuwintas.
Ang Power P 1 na ibinibigay sa stator winding ng isang induction motor ay katumbas ng:
![]()
kung saan ang m 1 ay ang bilang ng mga phase.
Ang motor stator ay may mga sumusunod na pagkawala ng enerhiya:
1) sa stator winding R es. =m 1 I 1 2 r 1 ;
2) sa stator steel at hysteresis at eddy currents P C .
Ang kapangyarihan na ibinibigay sa rotor ay ang kapangyarihan ng umiikot na magnetic field, na tinatawag ding electromagnetic power P eM .
Ang electromagnetic power ay katumbas ng pagkakaiba sa pagitan ng power na ibinibigay sa motor at ang mga pagkalugi sa motor stator, i.e.
|
Ang pagkakaiba sa pagitan ng Р eM at kumakatawan sa mga de-koryenteng pagkalugi sa rotor winding Р eP, kung napapabayaan natin ang mga pagkalugi sa rotor steel dahil sa kanilang kawalang-halaga (ang dalas ng remagnetization ng rotor ay kadalasang napakaliit):
Samakatuwid, ang mga pagkalugi sa rotor winding ay proporsyonal sa slip ng rotor.
Kung mula sa mekanikal na kapangyarihan na binuo ng rotor, ibawas ang mekanikal na pagkalugi R mx dahil sa friction sa rotor bearings, air friction, atbp. field sa mga ngipin ng stator at rotor, pagkatapos ay magkakaroon ng kapaki-pakinabang na kapangyarihan sa motor shaft, na tinutukoy namin ng P 2.
Ang kahusayan ng isang induction motor ay maaaring matukoy ng formula:
Mula sa huling expression makikita na ang sandali ng pag-ikot ng isang induction motor ay proporsyonal sa produkto ng magnitude ng umiikot na magnetic flux, ang rotor current at ang cosine ng anggulo sa pagitan ng e. d.s. rotor at ang kasalukuyang nito,
Mula sa katumbas na circuit ng isang asynchronous na motor, ang halaga ng pinababang rotor current ay nakuha, na ibinibigay namin nang walang patunay.
Pinapayuhan ka naming basahin
, diagnosis, paggamot Paggamot ng urogenital chlamydia") Urogenital chlamydia - paglalarawan, sanhi, sintomas (senyales), diagnosis, paggamot Paggamot ng urogenital chlamydia
Urogenital chlamydia - paglalarawan, sanhi, sintomas (senyales), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano Upang maghintay o hindi maghintay para sa isang tao mula sa hukbo Para sa anong dahilan maaari silang italaga mula sa hukbo
Upang maghintay o hindi maghintay para sa isang tao mula sa hukbo Para sa anong dahilan maaari silang italaga mula sa hukbo Inihurnong mansanas na may cottage cheese Mga inihurnong mansanas na may cottage cheese
Inihurnong mansanas na may cottage cheese Mga inihurnong mansanas na may cottage cheese

