Sa ilang mga bansa sa mga asynchronous na makina Kasama rin ang mga collector machine. Ang isa pang pangalan para sa mga asynchronous na makina ay pagtatalaga sa tungkulin dahil sa ang katunayan na ang kasalukuyang sa rotor winding ay sapilitan ng umiikot na patlang ng stator. Ang mga asynchronous na makina ngayon ay bumubuo sa karamihan ng mga de-koryenteng makina. Ang mga ito ay pangunahing ginagamit bilang mga de-koryenteng motor at ang mga pangunahing converter. enerhiyang elektrikal sa mekanikal.
Mga kalamangan:
- Dali ng paggawa.
- Walang mekanikal na kontak sa static na bahagi ng makina.
Bahid:
- Maliit Pagsisimula ng metalikang kuwintas.
- Makabuluhang panimulang kasalukuyang.
Kwento
Ang priyoridad sa paglikha ng isang induction motor ay pag-aari ni Nikola Tesla, na sa Budapest noong tagsibol ng 1882 ay nalutas ang problema ng paglikha ng isang umiikot. magnetic field na may nakapirming multi-phase winding alternating current, at noong 1884 sa Strasbourg ay nagpakita siya ng gumaganang modelo ng kanyang makina. Ang isang kontribusyon sa pagbuo ng mga asynchronous na motor ay ginawa ni Galileo Ferraris, na noong 1885 sa Italya ay nagtayo ng isang modelo ng isang 3 W induction motor. Noong 1888, inilathala ni Ferraris ang kanyang pananaliksik sa isang artikulo para sa Royal Academy of Sciences sa Turin (sa parehong taon, natanggap ni Tesla ang US Patent 381,968 na may petsang 05/01/1888 ( U.S. Patent 0 381 968 | aplikasyon para sa imbensyon Blg. 252132 na may petsang 10/12/1887), na nakabalangkas teoretikal na batayan asynchronous na motor. Ang merito ng Ferraris ay ang paggawa ng isang maling konklusyon tungkol sa isang maliit na kahusayan. asynchronous na motor at ang kawalan ng kakayahang gumamit ng mga alternating current system, iginuhit niya ang atensyon ng maraming mga inhinyero sa problema ng pagpapabuti ng mga asynchronous na makina. Ang isang artikulo ni Galileo Ferraris na inilathala sa journal na Atti di Turino ay muling inilimbag ng isang English journal at binasa noong Hulyo 1888 ni Mikhail Osipovich Dolivo-Dobrovolsky, isang nagtapos ng Darmstadt Higher Technical School, isang katutubong ng Russia. Noong 1889, nakatanggap si Dolivo-Dobrovolsky ng isang patent para sa isang three-phase asynchronous na motor na may squirrel-cage rotor, at noong 1890 - mga patent sa England No. 20425 at Germany No. 75361 para sa isang three-phase asynchronous na motor na may phase rotor . Binuksan ng mga imbensyon na ito ang panahon ng mass industrial application ng mga de-koryenteng makina. Sa kasalukuyan, ang asynchronous na motor ay ang pinakakaraniwang de-koryenteng motor.
Disenyo
Ang isang asynchronous na makina ay may stator at rotor na pinaghihiwalay ng air gap. Ang mga aktibong bahagi nito ay windings at magnetic circuit (core); ang lahat ng iba pang mga bahagi ay istruktura, na nagbibigay ng kinakailangang lakas, katigasan, paglamig, ang posibilidad ng pag-ikot, atbp.
Ang stator winding ay isang three-phase (in pangkalahatang kaso- multi-phase) paikot-ikot, ang mga conductor na kung saan ay pantay na ipinamamahagi sa paligid ng circumference ng stator at phase-by-phase na inilatag sa mga grooves na may angular na distansya na 120 el.deg. Ang mga phase ng stator winding ay konektado sa pamamagitan ng karaniwang mga scheme"triangle" o "star" at kumonekta sa network tatlong-phase na kasalukuyang. Ang stator magnetic circuit ay remagnetize sa proseso ng pagbabago ng kasalukuyang sa stator winding, kaya ito ay hinikayat mula sa mga de-koryenteng steel plate upang matiyak ang minimal na pagkalugi ng magnetic. Ang pangunahing paraan ng pag-assemble ng magnetic circuit sa isang pakete ay blending.
Ayon sa disenyo ng rotor, ang mga asynchronous na makina ay nahahati sa dalawang pangunahing uri: may short-circuited rotor at yugto rotor. Ang parehong mga uri ay may parehong disenyo ng stator at naiiba lamang sa disenyo ng rotor winding. Ang rotor magnetic circuit ay ginawa katulad ng stator magnetic circuit - mula sa mga de-koryenteng steel plate.
rotor ng squirrel-cage
Rotor ng asynchronous squirrel-cage machine
Ang short-circuited rotor winding, madalas na tinatawag na "squirrel cage" dahil sa panlabas na pagkakapareho ng disenyo, ay binubuo ng tanso o aluminum rods, short-circuited sa mga dulo na may dalawang singsing. Ang mga rod ng paikot-ikot na ito ay ipinasok sa mga grooves ng rotor core. Ang mga core ng rotor at stator ay may istraktura ng gear. Sa mga makina na may maliit at katamtamang kapangyarihan, ang paikot-ikot ay karaniwang ginagawa sa pamamagitan ng pagbuhos ng tinunaw na aluminyo na haluang metal sa mga grooves ng rotor core. Kasama ang "squirrel cage" rods, ang mga short-circuiting ring at end blades ay inihahagis, na nagpapahangin sa makina. Sa mga makina na may mataas na kapangyarihan, ang "squirrel cage" ay gawa sa mga tungkod na tanso, ang mga dulo nito ay konektado sa mga short-circuit na singsing sa pamamagitan ng hinang.
Kadalasan, ang mga grooves ng rotor o stator ay ginawang beveled upang mabawasan ang mas mataas na harmonic EMF na dulot ng magnetic flux ripples dahil sa pagkakaroon ng mga ngipin, ang magnetic resistance na kung saan ay makabuluhang mas mababa kaysa sa magnetic resistance ng winding, pati na rin upang mabawasan ang ingay na dulot ng magnetic na dahilan. Upang mapabuti ang panimulang pagganap asynchronous na motor na may rotor ng squirrel-cage, ibig sabihin, isang pagtaas sa panimulang metalikang kuwintas at pagbaba sa panimulang kasalukuyang, isang espesyal na hugis ng uka ang ginagamit sa rotor. Sa kasong ito, ang panlabas na bahagi ng rotor groove mula sa axis ng pag-ikot ay may mas maliit na cross section kaysa sa panloob na bahagi. Pinapayagan ka nitong gamitin ang epekto ng kasalukuyang pag-aalis, dahil sa kung saan ang aktibong paglaban ng rotor winding ay tumataas sa malalaking slips (sa pagsisimula).
Ang mga asynchronous na motor na may rotor ng squirrel-cage ay may maliit na panimulang metalikang kuwintas at isang makabuluhang panimulang kasalukuyang, na isang makabuluhang disbentaha ng "squirrel cage". Samakatuwid, ginagamit ang mga ito sa mga electric drive kung saan hindi kinakailangan ang malalaking panimulang torque. Sa mga pakinabang, dapat itong pansinin ang kadalian ng paggawa, at ang kawalan ng electrical contact sa static na bahagi ng makina, na ginagarantiyahan ang tibay at binabawasan ang mga gastos sa pagpapanatili. Sa isang espesyal na disenyo ng rotor, kapag ang isang guwang na silindro ng aluminyo lamang ang umiikot sa puwang ng hangin, posible na makamit ang isang mababang pagkawalang-galaw ng makina.
phase rotor
Ang phase rotor ay may tatlong-phase (sa pangkalahatang kaso, isang multi-phase) na paikot-ikot, kadalasang konektado ayon sa scheme ng "star" at inilabas upang madulas ang ringsrotating gamit ang machine shaft. Sa tulong ng mga graphite o metal-graphite brush na dumudulas sa mga singsing na ito, papunta sa rotor winding circuit:
- isama ang ballast rheostatacting bilang karagdagang aktibong pagtutol, pareho para sa bawat yugto. Sa pamamagitan ng pagbabawas ng panimulang kasalukuyang, ang panimulang metalikang kuwintas ay nadagdagan sa pinakamataas na halaga (sa unang sandali ng oras). Ang ganitong mga makina ay ginagamit upang himukin ang mga mekanismo na inilalagay sa pagkilos kapag mabigat na dalahin o nangangailangan ng maayos na kontrol sa bilis.
- isama ang mga inductance (chokes) sa bawat yugto ng rotor. Ang paglaban ng mga chokes ay nakasalalay sa dalas ng dumadaloy na kasalukuyang, at, tulad ng alam mo, sa rotor sa unang sandali ng pagsisimula, ang dalas ng mga slip na alon ay ang pinakamataas. Habang umiikot ang rotor, bumababa ang dalas ng sapilitan na mga alon, at kasama nito ang paglaban ng inductor ay bumababa. Inductive reactance sa phase rotor circuit ay nagbibigay-daan sa iyo upang i-automate ang pamamaraan para sa pagsisimula ng engine, at, kung kinakailangan, upang "mahuli" ang engine, na ang bilis ay bumaba dahil sa labis na karga. Ang inductance ay nagpapanatili ng rotor currents sa isang pare-parehong antas.
- isama ang pinagmulan direktang kasalukuyang, kaya nakakakuha ng kasabay na makina.
- isama ang kapangyarihan mula sa inverter, na nagpapahintulot sa iyo na kontrolin ang bilis at mga katangian ng metalikang kuwintas ng makina. Ito ay isang espesyal na mode ng operasyon (double-feed machine). Posibleng i-on ang boltahe ng mains nang walang inverter, na may phasing na kabaligtaran sa kung saan pinapagana ang stator.
Schrage-Richter engine
Three-phase commutator asynchronous na motor na pinapakain mula sa bahagi ng rotor.
Inverted (pinalakas mula sa rotor) asynchronous motor, na nagbibigay-daan sa iyo upang maayos na ayusin ang bilis mula sa minimum (ang saklaw ay tinutukoy ng paikot-ikot na data ng karagdagang paikot-ikot na ginamit upang makakuha ng karagdagang emf, na ipinakilala sa dalas ng slip sa pangalawang circuit ng ang makina) sa maximum, na karaniwang nasa itaas ng bilis ng pag-synchronize. Pisikal na ginawa sa pamamagitan ng pagbabago ng solusyon ng isang double set ng mga brush para sa bawat "Phase" ng pangalawang circuit ng engine. Kaya, sa pamamagitan ng muling pag-aayos ng mga brush traverses gamit ang isang mekanikal na aparato (handwheel o iba pang actuator), posible na makontrol ang bilis ng AC induction motor. Ang ideya ng kontrol sa pangkalahatan ay napaka-simple at ipapatupad mamaya sa tinatawag na asynchronous-valve cascades, kung saan ang isang thyristor converter ay kasama sa phase rotor circuit, na nagtrabaho bilang isang inverter o sa isang rectifier mode. Ang kakanyahan ng ideya ay ang isang karagdagang emf ay ipinakilala sa pangalawang circuit ng isang induction motor. variable amplitude at phase na may slip frequency. Ginagawa ng kolektor ang gawain ng pagtutugma ng dalas ng karagdagang emf sa dalas ng slip ng rotor. Kung ang karagdagang e.m.f. ay kabaligtaran sa pangunahing, ang kapangyarihan ay output mula sa pangalawang circuit ng engine na may kaukulang pagbaba sa bilis ng makina, ang limitasyon ng bilis ay idinidikta lamang ng mga kondisyon ng paglamig ng mga windings). Sa synchronism point ng makina, ang dalas ng karagdagang emf. ay katumbas ng zero, iyon ay, ang isang direktang kasalukuyang ay ibinibigay sa pangalawang circuit ng kolektor. Sa kaso ng pagsusuma ng karagdagang e.m.f. kasama ang pangunahing isa, ang karagdagang kapangyarihan ay nababaligtad sa pangalawang circuit ng makina, at, nang naaayon, ang acceleration sa itaas ng kasabay na bilis. Kaya, ang resulta ng regulasyon ay isang pamilya ng medyo matibay na mga katangian na bumababa kritikal na sandali kapag decelerating, at kapag accelerating sa itaas kasabay na bilis - kasama ang proporsyonal na pagtaas nito.
Ang partikular na interes ay ang pagpapatakbo ng makina na may asymmetrical na solusyon ng brush traverses. Sa kasong ito, ang vector diagram ng karagdagang emf. tumatanggap ang motor ng tinatawag na tangential component, na ginagawang posible na gumana sa isang capacitive na tugon sa network.
Sa istruktura, ang motor ay isang baligtad na makina, kung saan ang dalawang windings ay inilalagay sa rotor: power supply mula sa slip rings at isang winding na konektado sa pamamagitan ng dalawang pares ng mga brush bawat "phase" sa pangalawang winding ng stator. Sa katunayan, ang dalawang bahaging ito pangalawang paikot-ikot Depende sa posisyon ng brush traverses, ito ay lumiliko sa alinman ayon sa bawat isa o sa magkasalungat na direksyon. Ito ay kung paano gumagana ang regulasyon.
Ang ganitong mga makina ay nakatanggap ng pinakamalaking pag-unlad noong 30s ng XX siglo. Sa Unyong Sobyet, na may mababang kultura ng produksyon ng industriya ng kuryente, ang mga AC collector machine (ACC) ay hindi nakatanggap ng anumang kapansin-pansing pamamahagi at pag-unlad dahil sa tumaas na mga kinakailangan para sa paggawa ng collector-brush assembly at ang pangkalahatang mataas na gastos. Natagos nila ang teritoryo ng USSR pangunahin bilang bahagi ng kagamitan na binili sa ibang bansa at, sa unang pagkakataon, ay pinalitan ng hindi gaanong mahusay, ngunit mas murang direktang kasalukuyang mga makina o asynchronous na motor na may isang phase rotor. Mga kasalukuyang pamamaraan para sa pagkalkula ng c.m.f. na binuo ng Academician M.P. Kostenko (sa kanyang mga aklat-aralin, ang mga asynchronous na makina ay nahahati sa mga kolektor at brushless) ay itinuturing na isang sapat na pamantayan para sa pagganap ng makina sa pamamagitan ng pagsuri nito ayon sa mga kondisyon ng paglipat (para sa paghahambing, ang pagkalkula ng thermal ay kritikal para sa isang DC motor) .
Sa kasalukuyan, ang Schrage engine ay interesado lamang bilang isang mahusay na visual aid para sa mga mag-aaral. Ayon kay L. Ya. Telichko, guro ng departamento ng electric drive ng Lipetsk Technical University, " pinakamahusay na modelo, kung saan ang teorya at kasanayan ng kaskad ay maaaring hawakan ng mga kamay, imposibleng mahanap.
Prinsipyo ng pagpapatakbo
inilapat sa stator winding AC boltahe, sa ilalim ng pagkilos kung saan ang isang kasalukuyang dumadaloy sa mga paikot-ikot na ito at lumilikha ng isang umiikot na magnetic field. Ang magnetic field ay kumikilos sa rotor winding at, ayon sa batas ng electromagnetic induction, ay nagpapahiwatig ng isang EMF sa kanila. Sa rotor winding, sa ilalim ng pagkilos ng sapilitan EMF, isang kasalukuyang arises. Ang kasalukuyang sa rotor winding ay lumilikha ng sarili nitong magnetic field, na nakikipag-ugnayan sa umiikot na magnetic field ng stator. Bilang resulta, isang puwersa ang kumikilos sa bawat ngipin ng rotor magnetic circuit, na kung saan, ang pagdaragdag sa paligid ng circumference, ay lumilikha ng umiikot na electromagnetic moment na nagiging sanhi ng pag-ikot ng rotor.
Bilis ng pag-ikot ng stator field
Kapag ang paikot-ikot na stator ay binibigyan ng isang three-phase (sa pangkalahatang kaso, multi-phase) na kasalukuyang, isang umiikot na magnetic field ay nilikha, ang kasabay na dalas ng pag-ikot [rpm] na kung saan ay nauugnay sa dalas ng mains [Hz] ng ratio:
,kung saan ang bilang ng mga pares ng magnetic pole ng stator winding.
Depende sa bilang ng mga pares ng mga pole, ang mga sumusunod na halaga ng mga rotational frequency ng stator magnetic field ay posible, sa dalas ng supply boltahe na 50 Hz:
| n, rpm | |
|---|---|
| 3000 | 1 |
| 1500 | 2 |
| 1000 | 3 |
| 300 | 10 |
Karamihan sa mga motor ay may 1-3 pares ng mga pole, bihirang 4. Higit pang mga pole ang ginagamit na napakabihirang, ang mga naturang makina ay may mababang kahusayan at power factor, ngunit pinapayagan nila ang motor rotor na umikot nang napakabagal at mabagal.
Mga mode ng pagpapatakbo
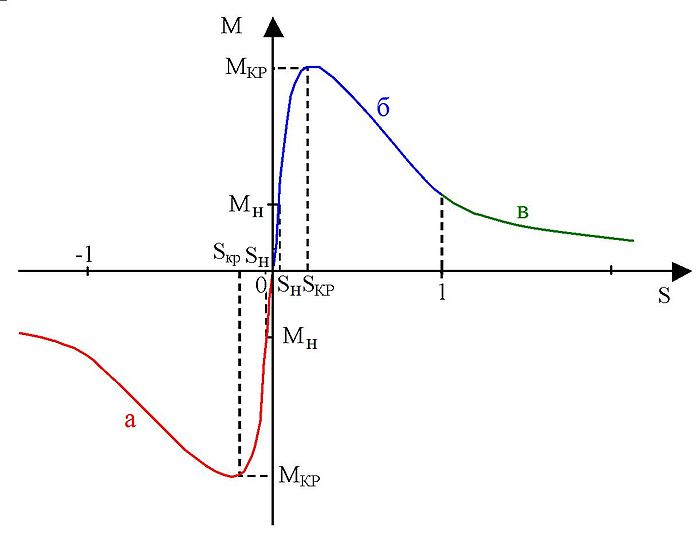
Mga mekanikal na katangian ng isang asynchronous na makina: a - mode ng pagbawi ng enerhiya sa network (generator mode), b - motor mode, c - counter-inclusion mode (electromagnetic brake mode).
Motor mode
Kung ang rotor ay nakatigil o ang dalas ng pag-ikot nito ay mas mababa sa kasabay, kung gayon ang umiikot na magnetic field ay tumatawid sa mga conductor ng rotor winding at hinihimok ang isang EMF sa kanila, sa ilalim ng pagkilos kung saan lumilitaw ang isang kasalukuyang sa rotor winding. Ang mga puwersa ng electromagnetic ay kumikilos sa mga konduktor na may kasalukuyang paikot-ikot na ito (o sa halip, sa mga ngipin ng rotor core); ang kanilang kabuuang puwersa ay bumubuo ng electromagnetic torque na humihila sa rotor kasama ng magnetic field. Kung sapat na ang sandaling ito upang malampasan ang mga puwersa ng friction, ang rotor ay magsisimulang umikot, at ang steady rotational speed [rpm] nito ay tumutugma sa equation electromagnetic na sandali preno, na nilikha ng pag-load sa baras, mga puwersa ng friction sa mga bearings, bentilasyon, atbp. Ang bilis ng rotor ay hindi maaaring maabot ang bilis ng magnetic field, dahil sa kasong ito ang bilis ng angular ng pag-ikot ng magnetic field na may kaugnayan sa paikot-ikot na rotor ay magiging katumbas ng zero, ang magnetic field ay titigil sa pag-udyok sa rotor winding EMF at, sa turn, ay lumikha ng metalikang kuwintas; Kaya, para sa motor mode ng pagpapatakbo ng isang asynchronous na makina, ang hindi pagkakapantay-pantay ay totoo:
.Ang kamag-anak na pagkakaiba sa pagitan ng mga frequency ng pag-ikot ng magnetic field at rotor ay tinatawag dumudulas:
.Halata na sa motor mode .
mode ng generator
Kung ang rotor ay pinabilis sa tulong ng isang panlabas na metalikang kuwintas (halimbawa, ng ilang motor) sa isang dalas na mas malaki kaysa sa dalas ng pag-ikot ng magnetic field, kung gayon ang direksyon ng EMF sa rotor winding at ang aktibong sangkap ng Ang rotor current ay magbabago, iyon ay, ang asynchronous na makina ay papasok mode ng generator. Kasabay nito, magbabago din ang direksyon ng electromagnetic torque, na magiging braking. Slip sa generator mode.
Upang patakbuhin ang isang asynchronous na makina sa generator mode, kinakailangan ang isang reaktibong pinagmumulan ng kuryente na lumilikha ng magnetic field. Sa kawalan ng isang paunang magnetic field sa stator winding, ang flux ay nilikha gamit ang mga permanenteng magnet, o may isang aktibong pagkarga dahil sa natitirang induction ng makina at mga capacitor na konektado nang kahanay sa mga phase ng stator winding.
Ang isang asynchronous generator ay gumagamit ng reactive current at nangangailangan ng pagkakaroon ng mga reactive power generators sa network sa anyo ng mga kasabay na makina, kasabay na compensator, static capacitor banks (BSK). Dahil dito, sa kabila ng kadalian ng pagpapanatili, asynchronous generator ay medyo bihirang ginagamit, pangunahin bilang low-power wind generators, auxiliary sources ng low power at braking device. Ngunit ang generator mode ng isang asynchronous na motor ay madalas na ginagamit. Sa mode na ito, gumagana ang mga makina ng mga subway escalator, na bumababa. Sa mode ng generator, ang mga makina ng elevator ay nagpapatakbo, depende sa ratio ng timbang sa cabin at sa counterweight.
Idle mode
Ang idle mode ng isang asynchronous na motor ay nangyayari kapag walang load sa baras sa anyo ng isang gearbox at isang gumaganang katawan. Mula sa karanasan ng kawalang-ginagawa, ang mga halaga ng kasalukuyang magnetizing at ang pagkawala ng kapangyarihan sa magnetic circuit, sa mga bearings, at sa fan ay maaaring matukoy. Tunay na walang ginagawa s=0.01-0.08. Sa perpektong idle mode n 2 =n 1, samakatuwid s=0 (sa katunayan, ang mode na ito ay hindi matamo, kahit na sa ilalim ng pagpapalagay na ang alitan sa mga bearings ay hindi lumilikha ng sarili nitong load torque - ang mismong prinsipyo ng pagpapatakbo ng engine ay nagpapahiwatig na ang rotor ay nahuhuli sa stator field upang lumikha ng isang rotor field. Kailan s=0 ang stator field ay hindi tumatawid sa rotor windings at hindi maaaring mag-udyok ng kasalukuyang sa loob nito, na nangangahulugan na ang rotor magnetic field ay hindi nilikha.)
Electromagnetic brake mode (opsyon)
Kung binago mo ang direksyon ng pag-ikot ng rotor o ang magnetic field upang umikot sila sa magkasalungat na direksyon, kung gayon ang EMF at ang aktibong sangkap ng kasalukuyang sa rotor winding ay ididirekta sa parehong paraan tulad ng sa motor mode, at ang makina ay kumonsumo ng aktibong kapangyarihan mula sa network. Gayunpaman, ang electromagnetic moment ay ididirekta sa tapat ng load moment, bilang isang braking. Ang mga sumusunod na hindi pagkakapantay-pantay ay nananatili para sa rehimen:
Ang mode na ito ay ginagamit sa loob ng maikling panahon, dahil sa panahon nito maraming init ang nabuo sa rotor, na kung saan ang engine ay hindi maaaring mawala, na maaaring makapinsala dito.
Para sa mas malambot na pagpepreno, maaaring gamitin ang generator mode, ngunit ito ay epektibo lamang sa mga rebolusyon na malapit sa mga nominal.
Mga paraan upang makontrol ang isang asynchronous na motor
Sa ilalim ng kontrol ng isang asynchronous AC motor ay nangangahulugang isang pagbabago sa bilis ng rotor at / o metalikang kuwintas nito. Mayroong mga sumusunod na paraan upang makontrol ang isang asynchronous na motor:
- rheostatic - pagbabago ng bilis ng pag-ikot ng IM na may isang phase rotor sa pamamagitan ng pagbabago ng paglaban ng rheostat sa rotor circuit, bilang karagdagan, pinatataas nito ang panimulang metalikang kuwintas;
- dalas - pagbabago sa bilis ng pag-ikot ng IMPYERNO sa pamamagitan ng pagbabago ng dalas ng kasalukuyang sa network ng supply, na nangangailangan ng pagbabago sa dalas ng pag-ikot ng patlang ng stator. Ang makina ay nakabukas sa pamamagitan ng frequency converter;
- ang paglipat ng mga windings mula sa "star" circuit sa "triangle" circuit sa proseso ng pagsisimula ng engine, na binabawasan ang mga panimulang alon sa windings ng halos tatlong beses, ngunit sa parehong oras, ang metalikang kuwintas ay bumababa din;
- pulsed - sa pamamagitan ng pagbibigay ng isang espesyal na uri ng supply boltahe (halimbawa, sawtooth);
- ang pagpapakilala ng karagdagang emf ayon sa o kabaligtaran ng slip frequency sa pangalawang circuit;
- pagbabago sa bilang ng mga pares ng mga pole, kung ang naturang switching ay ibinibigay nang constructively (para lamang sa mga short-circuit rotors);
- sa pamamagitan ng pagbabago ng amplitude ng supply boltahe, kapag ang amplitude (o epektibong halaga) lamang ng control boltahe ang nagbabago. Pagkatapos ang control at excitation voltage vectors ay mananatiling patayo (autotransformer start);
- Kasama sa amplitude-phase na pamamaraan ang dalawang pamamaraan na inilarawan;
- pagsasama sa power circuit ng stator ng mga reactor;
Mga Tala
Tingnan din
- Veshenevsky S. N. Mga katangian ng mga motor sa isang electric drive. Edisyon 6, binago. Moscow, Energia Publishing House, 1977. Circulation 40,000 copies. UDC 62-83:621,313.2
Mga link
- Ang aparato at prinsipyo ng pagpapatakbo ng mga asynchronous electric motors
- Gaidullin Alexander "Assembly ng isang asynchronous na motor 4A200"
- Asynchronous electric motor ng three-phase current M. O. Dolivo-Dobrovolsky
| |||||||||||
Ang aparato ng isang asynchronous na makina. Ang nakatigil na bahagi ng isang AC machine ay tinatawag na stator, at ang gumagalaw na bahagi ay
rotor. Ang stator at rotor core ng mga asynchronous na makina ay binuo mula sa mga sheet ng electrical steel (Larawan 19-1), na kadalasang pinahiran sa magkabilang panig ng oil-rosin insulating varnish bago ang pagpupulong. Ang mga core ng mga makina na may mababang kapangyarihan ay minsan ay binuo mula sa mga unvarnished sheet, dahil sa kasong ito ang isang natural o artipisyal na nilikha na layer ng mga oxide sa ibabaw ng mga sheet ng bakal ay sapat na pagkakabukod.
Sa fig. Ang Figure 19-2 ay isang sumabog na view ng isang maliit na power induction motor na nagpapakita ng stator, rotor at end shield. Sa fig. Ang 19-3 ay isang pagguhit ng isang medium power induction motor.
kanin. 19-1. Mga stator core sheet (1) at rotor (2) ng isang asynchronous na makina ng maliit at katamtamang kapangyarihan
Ang stator core ay naayos sa housing, at ang rotor core - sa baras^ (mga makina na mababa at katamtamang lakas) o sa isang rim na may stub at isang manggas na inilagay sa baras (mga makinang may mataas na kapangyarihan) Ang rotor shaft ay umiikot sa mga bearings na inilalagay sa mga bearing shield na nakakabit sa stator housing (machine kovy "stacks 11 М0ШН0Стиi) "o sa piece-mounted bearings
Sa panloob na cylindrical na ibabaw ng stator at sa panlabas na cylindrical na ibabaw ng rotor mayroong mga grooves,

kanin. 19-2. Larawan ng isang asynchronous na motor na may squirrel-cage rotor type A71-6 na may lakas na 14 ket disassembled
kung saan inilalagay ang mga conductor ng stator at rotor windings. Ang stator winding ay karaniwang tatlong-phase (tingnan ang Ch. 21); ay konektado sa isang tatlong-phase kasalukuyang network at samakatuwid ay tinatawag ding pangunahing paikot-ikot. Ang rotor winding ay maaari ding gawing three-phase katulad ng stator winding. Ang mga dulo ng mga phase ng naturang rotor winding ay karaniwang konektado sa isang bituin, at ang mga simula ay inilabas sa tulong ng mga slip ring at metal-graphite brushes (Fig. 19-3). Ang ganitong asynchronous na makina ay tinatawag na isang rotor machine ng sugat. Ang isang three-phase na panimulang o pagsasaayos ng rheostat ay karaniwang konektado sa mga slip ring. Ang phase winding ng rotor ay ginaganap na may parehong bilang ng mga magnetic field pole bilang stator.
Ang isa pang uri ng rotor winding ay isang winding sa anyo ng isang squirrel cage (Fig. 19-4). Sa kasong ito, sa bawat uka ay may tanso o aluminyo na baras at ang mga dulo ng lahat ng mga baras
mula sa magkabilang dulo ng rotor ay konektado sa tanso o aluminyo singsing, na short-circuit ang rods. Ang mga rod ay karaniwang hindi insulated mula sa core. Sa mga makina hanggang sa 1QG k&p Ang mga rod at singsing, kasama ang mga pakpak para sa bentilasyon, ay karaniwang ginagawa sa pamamagitan ng pagbuhos ng aluminyo sa rotor
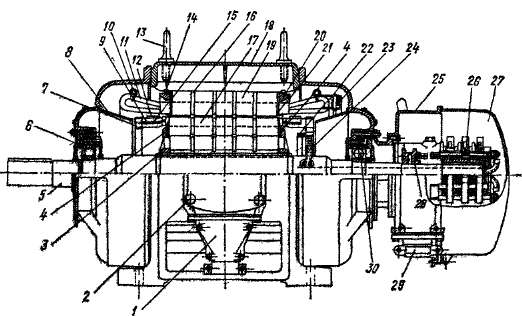
Figure 19-3 180 Three-Phase Wound Rotor Induction Motor ket,
975 rpm
1 - cable box, 2 - outlet box ng mga dulo ng stator winding, 3 - ring dowels para sa pag-fasten ng rotor core, 4 - mga pressure washer ng rotor core, 5 - rotor shaft, 6 at 30 - ball at roller bearings, 7 - tanso na kumukonekta sa mga collar ng rotor winding rods, 8 -^ mga diffuser para sa pagdidirekta ng papasok na malamig na hangin sa pamamagitan ng mga panangga sa lining, 9 - winding rods^ ng rotor, "10 - retaining rings, // - stator winding, 12 - wire bandage! rotor, 13 - lifting rings, /* - arc keys, 15 - ring insulating gaskets, 16 - radial ventilation ducts, 17 - rotor core, AY->j cast stator housing, 19 - stator core, 20 at 21 - mga pressure pad at stator core ring, 22 - isang singsing para sa pagkonekta sa mga dulo ng rotor winding sa isang bituin, 23 - «mga intercoil at intergroup na koneksyon ng stator winding, 34 - mga konklusyon ng coc* tsov ng rotor winding sa slip rings,. 25 at 27 - kahon at takip ng mga slip ring, 26 - contact rings, 28 - movable sleeve na may mga contact para sa sarado^. ang rotor winding leads ay short-circuited, 29 - pagkabit para sa output ng rotra winding cons
sa panlabas na circuit
(Tingnan ang Fig. J9-2). Ang ganitong asynchronous na makina ay tinatawag na squirrel-cage machine. Karamihan sa mga chrono machine, lalo na sa maliliit at katamtamang power machine, ay may pinaikling gpTopOM.
Ang agwat ng hangin sa pagitan ng stator at rotor sa mga asynchronous na makina ay ang pinakamababang posible sa mga tuntunin ng mga kondisyon ng produksyon at pagiging maaasahan ng operasyon, at mas malaki ang mas malaki ang makina, mas malaki. Sa mga makina na may lakas ng ilang kilowatts, ang puwang
ay 0.4-0.5 mm, at sa mga makina na may mataas na kapangyarihan - ilang milimetro.
Ang mga asynchronous na makina ay karaniwang pinapalamig ng hangin. Ang mga sistema ng bentilasyon sa prinsipyo ay kapareho ng para sa mga makinang DC (tingnan ang § 8-5).
Umiikot na magnetic field. Sa fig. Ang 19-5 ay mga cross section ng isang bipolar (2p- 2) isang induction motor at nagpapakita ng likas na katangian ng stator magnetic field para sa dalawang punto sa oras.
Sa fig. Ipinapakita ng 19-5 ang pinakasimpleng stator winding, kapag ang bawat phase ay binubuo ng isang turn o dalawang conductor (1st phase - conductors PERO at x, 2nd phase - mga konduktor AT at Y, 3rd phase - mga konduktor MULA SA at Z) 1 . Ang mga conductor ng bawat pagliko (phase) ay matatagpuan - mula sa bawat isa sa layo ng poste division
saan D a- ang diameter ng panloob na bore ng stator, ar - ang bilang ng mga pares ng mga pole.
Sa fig. Ang 19-5 pole division ay gumagawa ng isang closed winding ro-kalahati ng isang bilog. Pitch ng coil o winder sa anyo ng squirrel's kee sa samakatuwid ay kumpleto (sa= t). Dalawang cell
360° el. Pagsisimula ng mga yugto A, B, C shifted kamag-anak sa bawat isa sa pamamagitan ng 120 ° el., na sa kasong ito ay isang third ng bilog.
Sa fig. 19-5, a ang mga direksyon ng mga alon sa mga conductor ng stator winding ay ipinapakita para sa sandali ng oras kung kailan ako ay - ako ay at ako b= ako c =
- - *)t- Mga agos ng phase sa fig. 19-5 ay itinuturing na positibo kapag
sila ay nasa simula ng mga yugto (konduktor A, B, C) nakadirekta sa kabila ng eroplano ng pagguhit. Sa fig. 19-5, b ang mga direksyon ng mga agos ay ipinapakita para sa sandali ng oras kapag ang mga yugto ng mga agos ay nagbago ng 30° at
Mula sa fig. 19-5 makikita na ang pamamahagi ng mga alon sa paligid ng circumference ng stator ay dalawang zone, bawat isa ay may halaga na m, at ang direksyon ay
1 Ayon sa GOST 183-66, ang simula ng mga phase ng stator windings ay itinalaga C 1 (C 2, Mula 3, ang kanilang mga dulo - ayon sa pagkakabanggit C 4, C 8, C g, at ang simula ng mga phase ng rotor windings - Pi, P 2 > ^z- Sa aklat na ito, para sa mga layuning metodolohikal, ang mga simula ng tatlong yugto na paikot-ikot ay tinutukoy sa lahat ng dako A, B, C o a, b, c, at ang mga dulo - ayon sa pagkakabanggit L, Y, Z o x, y, g.
![]()
ang mga agos sa mga zone na ito ay magkasalungat. Sa ibaba ng Fig. Ipinapakita ng 19-5 ang kasalukuyang mga curve ng pamamahagi kasama ang naka-deploy na stator.
Mula sa mga kurba na ito makikita na ang mga agos ay ipinamamahagi sa ibabaw ng stator ayon sa sinusoidal na batas.
Ang mga alon ng mga conductor ng stator winding ng isang dalawang-pol na makina ay nilikha, tulad ng sumusunod mula sa Fig. 19-5, bipolar magnetic flux
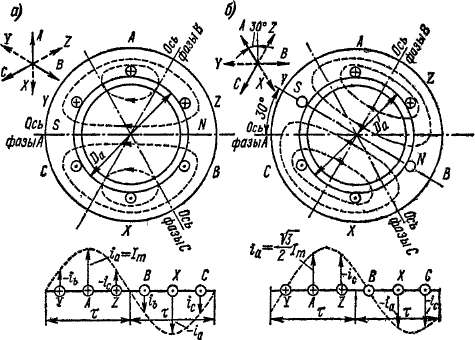
kanin. 19-5. Ang pinakasimpleng stator winding ng isang asynchronous machine na may 2p = 2 at ang magnetic field nito
Ф 1 (pagdaraan sa stator, rotor at air gap sa pagitan nila. Mula sa paghahambing ng Fig. 19-5, ai b Makikita na kapag ang yugto ng mga alon ay nagbabago ng 30°, ang kasalukuyang kurba ng pamamahagi at ang magnetic flux ay umiikot sa direksyon ng mga phase din ng 30° el.
Ang axis ng pagliko (paikot-ikot) ng phase PERO sa fig. 19-5 ay nakadirekta nang pahalang, at ang magnetic flux axis sa ako a = lm(Larawan 19-5, a) ay nakadirekta din nang pahalang. Ito ay malinaw na kung ang yugto ng mga alon kumpara sa Fig. 19-5, a ay magbabago ng 120° at samakatuwid ay magiging ako b \u003d ako ay , pagkatapos ay ang magnetic flux ay ididirekta sa kahabaan ng phase axis SA, i.e. magiging 120 ° el. Sa punto ng oras kung kailan ako c- ako, ang axis ng magnetic flux ay tumutugma sa axis ng phase C, atbp.
Kaya, ang stator winding ng isang dalawang-pol na makina, kapag pinalakas ng isang tatlong-phase na kasalukuyang, ay lumilikha ng isang dalawang-pol na umiikot na magnetic field.
Sa kasong ito, para sa isang panahon ng kasalukuyang pagbabago, ang field ay umiikot ng 2 tonelada o 360 ° el.
Bilis ng pag-ikot ng field
n i - h rpm,
kung saan ang fi ay ang dalas ng kasalukuyang stator.
Ang magnetic field ay umiikot sa direksyon ng phase sequence A, B, C paikot-ikot na stator. Upang baguhin ang direksyon ng pag-ikot ng patlang sa kabaligtaran, sapat na upang baguhin ang mga lugar sa mga clamp ng paikot-ikot Sa ki stator dulo ng dalawang konduktor na nagmumula sa mains.
Sa 2p \u003d 4, ang dibisyon ng poste ay isang quarter ng bilog at ang bawat yugto ng pinakasimpleng three-phase stator winding (Larawan 19-6) ay binubuo ng dalawang liko na may isang hakbang y = x, na kung saan ay inilipat kamag-anak sa bawat isa sa pamamagitan ng 2 m at maaaring konektado sa bawat isa sa serye o kahanay. Mga indibidwal na yugto at ang kanilang mga simula A, B, C habang lumipat din kamag-anak sa isa't isa ng 120 ° el. o sa kasong ito 1/6 ng bilog. Mula sa fig. 19-6 makikita na ang gayong paikot-ikot ay lumilikha ng kasalukuyang curve ng pamamahagi at isang magnetic field na may 2p \u003d 4. Ang patlang na ito ay umiikot din at para sa isa
ang panahon ng kasalukuyang umiikot din ng 2m, o sa kasong ito ng kalahating bilog, bilang isang resulta kung saan ang bilis ng field
p g = y, obIsec.
Sa pangkalahatang kaso, posible na gumawa ng isang paikot-ikot na may 2p = 6, 8, 10, atbp. Sa kasong ito, ang isang kasalukuyang curve ng pamamahagi at isang magnetic field na may mga p pares ng mga pole ay makukuha. Ang magnetic field ay umiikot sa isang bilis
kanin. 19-6. Ang pinakasimpleng paikot-ikot
stator ng isang asynchronous machine na may
2p - 4 at ang magnetic field nito

Linear peripheral na bilis ng pag-ikot ng field kasama ang circumference ng stator
Sa karaniwang dalas ng kasalukuyang pang-industriya sa USSR / = 50 Hz ang mga bilis ng pag-ikot ng patlang ay nakuha, na ipinahiwatig sa Talahanayan. 19-1.
Talahanayan 19-1
Ang bilis ng pag-ikot ng magnetic field ng windings na may iba't ibang bilang ng mga pares ng pole R sa L = 50 Hz
| R | ||||||||||
| Px, R/MUH |
Kapag nagdidisenyo ng mga alternating current windings, nagsusumikap sila (tingnan ang Kabanata 21) upang ang pamamahagi ng induction ng rotating field sa air gap kasama ang circumference ay mas malapit hangga't maaari sa sinusoidal.
Sa bandang huli ng kabanatang ito, ipapalagay na ang distribusyon na ito ay sinusoidal.
Ang prinsipyo ng pagpapatakbo ng isang asynchronous na makina. Ang magnetic flux Ф 1 (nilikha ng stator winding (Fig. 19-5 at 19-6), sa panahon ng pag-ikot nito, tumatawid sa mga conductor ng rotor winding, induces emf sa kanila. e p, at kung ang rotor winding ay sarado, ang mga alon ay lumabas dito c, ang dalas kung saan ang f 2 na may nakatigil na rotor (i \u003d 0) ay katumbas ng pangunahing dalas f t .
Kung ang rotor winding ay tatlong-phase, pagkatapos ay isang tatlong-phase na kasalukuyang ay sapilitan sa loob nito. Lumilikha ang kasalukuyang ito ng umiikot na pagkilos ng bagay ng rotor F 2, ang bilang ng mga pole 2 p, ang direksyon at bilis ng pag-ikot kung saan sa n = 0
katulad ng flux ng stator. Samakatuwid dumadaloy F g at F a ay umiikot nang sabay-sabay at bumubuo ng isang karaniwang umiikot na daloy ng motor F. Sa isang squirrel-cage rotor, isang multi-phase system ng mga alon % ay na-induce sa mga rod nito na may isang phase shift sa mga katabing rod sa pamamagitan ng isang anggulo
![]()

kung saan ang Z 2 ay ang bilang ng mga rotor rod. Ang mga alon na ito ay lumilikha din ng umiikot na pagkilos ng bagay Ф 2, ang bilang ng mga pole, ang direksyon at bilis ng pag-ikot na kung saan ay kapareho ng sa phase rotor flux. Samakatuwid, sa kasong ito, ang isang karaniwang magnetic flux F ay nabuo din sa makina. Sa pagtingin sa pagkakaroon ng isang karaniwang umiikot na magnetic field, maaaring isaalang-alang ng isa ang e. d.s., sapilitan sa mga windings ng field na ito.
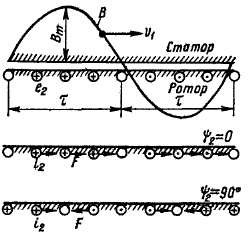
Bilang resulta ng pakikipag-ugnayan ng mga rotor currents sa daloy, ang mga mekanikal na puwersa na kumikilos sa mga conductor ng rotor ay lumitaw. F at umiikot na electromagnetic moment M.
Sa tuktok ng Fig. Ang 19-7 ay nagpapakita ng sinusoidal wave ng pangkalahatang magnetic field na umiikot sa bilis na i>i AT mga makina at direksyon e. d.s. e 2 sapilitan ng field na ito sa mga rod ng isang nakapirming squirrel-cage rotor. Sa ibaba ng Fig. Ipinapakita ng 19-7 ang mga direksyon ng agos ng mga pamalo, c at ang mga puwersang kumikilos sa kanila F para sa dalawang kaso: kapag ang phase shift angle "fa sa pagitan ng e, at r 2 ay zero at kapag ■ph 2 \u003d 90, Sa% \u003d 0, ang lahat ng pwersa ay kumikilos sa direksyon ng rotation-field. Samakatuwid, ang metalikang kuwintas
Larawan 19-7. Ang mga alon sa mga rod ng rotor winding at ang mga puwersa na kumikilos sa kanila
ay iba sa zero at kumikilos din sa direksyon ng pag-ikot ng field. Kasabay nito, sa t | e a \u003d 90 °, kumikilos ang mga puwersa magkaibang panig
at M= 0.
Sinusunod nito na ang metalikang kuwintas ay nilikha lamang ng aktibong bahagi ng kasalukuyang rotor
Pangkalahatang katangian ang konklusyong ito at may bisa rin para sa iba pang mga uri ng AC machine.
Ang rotor circuit ng isang asynchronous na motor ay palaging may isang tiyak na aktibong pagtutol, at samakatuwid, kapag sinimulan ang motor (n = 0) palaging 0< t|) 2 < 90°. В результате развиваемый момент M> Q, at kung ito ay mas malaki kaysa sa static braking torque sa shaft, pagkatapos ay ang motor rotor ay magsisimulang iikot sa direksyon ng pag-ikot ng field na may isang tiyak na bilis P<; p b ibig sabihin, iikot ito nang may ilang lag, o madulas, na may kaugnayan sa field ng stator,
![]()
![]()
Relatibong pagkakaiba sa pagitan ng mga bilis ng pag-ikot ng field at ng rotor

tinatawag na slip. Ang slip ay ipinahayag din bilang isang porsyento:
Ang bilis ng rotor P, ipinahayag sa mga tuntunin ng slip s, ayon sa formula (19-6), ay katumbas ng
Kapag sinimulan ang makina (P= 0) mayroon kaming s = 1, at kapag ang rotor ay umiikot kasabay ng stator field o, gaya ng sinasabi nila, na may kasabay na bilis (P= p d) magiging s = O. Kailan n = n x ang magnetic field ng stator na may kaugnayan sa rotor ay nakatigil at ang mga alon sa rotor ay hindi mai-induce, samakatuwid M= 0 at hindi maabot ng makina ang ganoong bilis ng pag-ikot. Bilang resulta, sa engine mode ito ay palaging 0< /г <п х at l>s>0.
Kapag ang rotor ay umiikot patungo sa field, ang dalas ng pagtawid sa rotor conductors sa pamamagitan ng field ay proporsyonal sa pagkakaiba ng bilis. tii- P at ang dalas ng kasalukuyang sa rotor winding
Pinapalitan ang halaga dito P mula sa formula (19-7) at pagkatapos ay ang halaga n x mula sa (19-2), nakukuha namin
i.e. ang pangalawang dalas ay proporsyonal sa slip.
Sa kasalukuyang dalas / 2< f t ang bilis ng pag-ikot ng rotor field na may kaugnayan sa rotor mismo n 2p ay mas mababa din p g at batay sa expression (19-9)
Bilis ng pag-ikot ng rotor field na nauugnay sa stator alinsunod sa mga expression (19-7) at (19-10)
i.e. ang bilis ng pag-ikot ng rotor field na may kaugnayan sa stator sa anumang bilis ng pag-ikot ng rotor P katumbas ng bilis ng pag-ikot ng field ng stator p x. Samakatuwid, ang mga patlang ng stator at rotor na may umiikot na rotor ay palaging umiikot nang sabay-sabay at bumubuo ng isang karaniwang umiikot na patlang.
Tandaan na ipinapakita sa Fig. 19-7 ang larawan ng mga direksyon ng mga alon at mekanikal na puwersa ay may bisa rin kapag umiikot ang rotor, kapag 0< P< n x(mode ng motor).
Kung ang rotor ng isang asynchronous machine sa tulong ng isang panlabas na puwersa (torque) ay dinadala sa pag-ikot sa direksyon ng pag-ikot ng stator field sa bilis na mas mataas kaysa sa kasabay (P> p d), pagkatapos ay aabutan ng rotor ang field at mga direksyon ng mga agos na sapilitan sa rotor winding kumpara sa mga ipinapakita sa Fig. 19-7 ay baligtad. Sa kasong ito, ang mga direksyon ng electromagnetic forces ay baligtad din F at electromagnetic moment M. sandali M sa kasong ito, ito ay magiging pagpepreno, at ang makina ay gagana sa generator mode at magbibigay ng aktibong kapangyarihan sa network. Ayon sa expression (19-6), sa generator mode s< 0.
Kung ang rotor ay pinaikot sa tapat na direksyon sa direksyon ng pag-ikot ng stator field (P< 0), то указанные на рис. 19-7 направления е 2 , / 2 и F ay nailigtas. Electromagnetic na sandali M ay kumilos sa direksyon ng pag-ikot ng stator field, ngunit pabagalin ang pag-ikot ng rotor. Ang mode na ito ng pagpapatakbo ng isang asynchronous na makina ay tinatawag na counter-inclusion mode o ang electromagnetic brake mode. Sa mode na ito, alinsunod sa expression (19-6) s> 1.
Ang mga mode ng pagpapatakbo ng isang asynchronous na makina ay tinalakay nang mas detalyado sa susunod na seksyon. Dito, gayunpaman, dapat tandaan na ang kaugnayan (19-11), dahil ito ay madaling makita, ay napanatili sa anumang paraan ng operasyon, para sa anumang halaga ng s, ibig sabihin, ang mga patlang ng stator at rotor ay umiikot nang sabay-sabay sa anumang paraan ng pagpapatakbo ng asynchronous machine.
Ang isang asynchronous na makina ay isang brushless AC machine kung saan ang umiikot na magnetic field ay nasasabik sa panahon ng operasyon, ngunit ang rotor ay umiikot nang asynchronously, i.e. na may angular velocity na iba sa angular velocity ng field.
Ang mga induction motor ay ang pinakakaraniwan sa lahat ng mga motor. Ang kanilang mga pakinabang ay nakasalalay sa pagiging simple ng aparato, mataas na pagiging maaasahan at medyo mababang gastos.
Three-phase asynchronous motors na iminungkahi ng M.O. Dolivo-Dobrovolsky noong 1888. Ang mga ito ay ginanap na may kapangyarihan mula sa mga fraction ng isang watt hanggang sa libu-libong kilowatts, na may dalas ng pag-ikot na 500 hanggang 3000 rpm at isang boltahe na hanggang 10 kV. Ang mga single-phase na asynchronous na motor ay ginagamit upang magmaneho ng mga gamit sa bahay, mga power tool, sa mga automation circuit. Ang mga ito ay pinalakas ng isang single-phase circuit at may kapangyarihan, bilang panuntunan, hindi mas mataas kaysa sa 0.5 kW.
Ang mga asynchronous na makina ay maaaring gumana sa generator mode. Ngunit bilang mga mapagkukunan ng elektrikal na enerhiya, halos hindi sila ginagamit, dahil wala silang sariling pinagmumulan ng paggulo ng magnetic flux at mas mababa sa kasabay na mga generator sa mga tuntunin ng kanilang pagganap.
Ang mga asynchronous na makina ay ginagamit bilang mga regulator ng boltahe, mga regulator ng phase, mga converter ng dalas, atbp.
Ang mga disadvantages ng mga asynchronous na makina ay ang pagiging kumplikado at hindi matipid na regulasyon ng kanilang pagganap.
Ang isang asynchronous na motor ay binubuo ng isang stator, isang rotor at mga kalasag sa dulo. Ang stator ay ang nakapirming bahagi ng makina at may cylindrical na hugis. Binubuo ito ng isang katawan, isang core at isang paikot-ikot. Ang katawan ay cast steel o cast iron. Ang stator magnetic circuit ay binuo mula sa manipis na mga sheet ng electrical steel. Sa panloob na ibabaw, mayroon itong mga grooves kung saan magkasya ang stator winding. Ang rotor ng isang induction motor - ang umiikot na bahagi - ay binubuo ng isang bakal na baras, isang magnetic circuit na gawa sa mga sheet ng elektrikal na bakal na may naselyohang mga grooves. Ang rotor winding ay maaaring short-circuited o phase. Ang short-circuited winding ay gawa sa aluminum o copper rods na short-circuited sa magkabilang dulo ng rotor. Ang phase rotor ay may three-phase winding na konektado sa isang bituin. Ang paikot-ikot na mga lead ay konektado sa mga singsing sa baras at konektado sa isang rheostat o iba pang aparato sa tulong ng mga brush. Ang umiikot na rotor ay inilalagay sa isang karaniwang baras na may stator. Ang baras ay umiikot sa tindig na mga kalasag. Ang koneksyon ng stator winding ay isinasagawa sa isang kahon kung saan ang mga simula ng mga phase C 1, C 2, C 3 at ang mga dulo ng mga phase C 4, C 5, C 6 ay inilabas. Sa fig. ipinapakita ang layout ng mga konklusyon na ito (a) at kung paano ikonekta ang mga ito sa isa't isa kapag ikinonekta ang phase windings na may isang bituin (b) at isang tatsulok (c).
Kung ang dalawang boltahe ay ipinahiwatig sa pasaporte ng motor, halimbawa, 380/220, kung gayon ang isang koneksyon sa bituin ay tumutugma sa isang mas mataas na boltahe, isang tatsulok na koneksyon sa isang mas maliit. Sa parehong mga kaso, ang boltahe ng phase ng motor ay 220 V.
Ang three-phase stator winding ay lumilikha ng magnetic field na umiikot sa bilis  .
.
Ang electromagnetic na pakikipag-ugnayan sa pagitan ng stator at ng rotor ay nangyayari lamang kapag ang bilis ng stator field at ang bilis ng pag-ikot ng rotor ay hindi pantay.
Umiikot na magnetic field ng stator ng isang asynchronous na makina. Dalas ng pag-ikot ng patlang ng stator, slip (Mga Katangian).
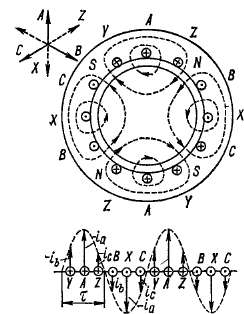
Ang batayan ng pagkilos ng isang induction motor ay isang umiikot na magnetic field. Ang prinsipyo ng pagkuha ng umiikot na magnetic field ay kung ang mga phase-shifted na alon ay dumadaloy sa isang sistema ng mga conductor na ibinahagi sa espasyo kasama ang isang bilog, kung gayon ang isang umiikot na field ay nilikha sa espasyo.
R 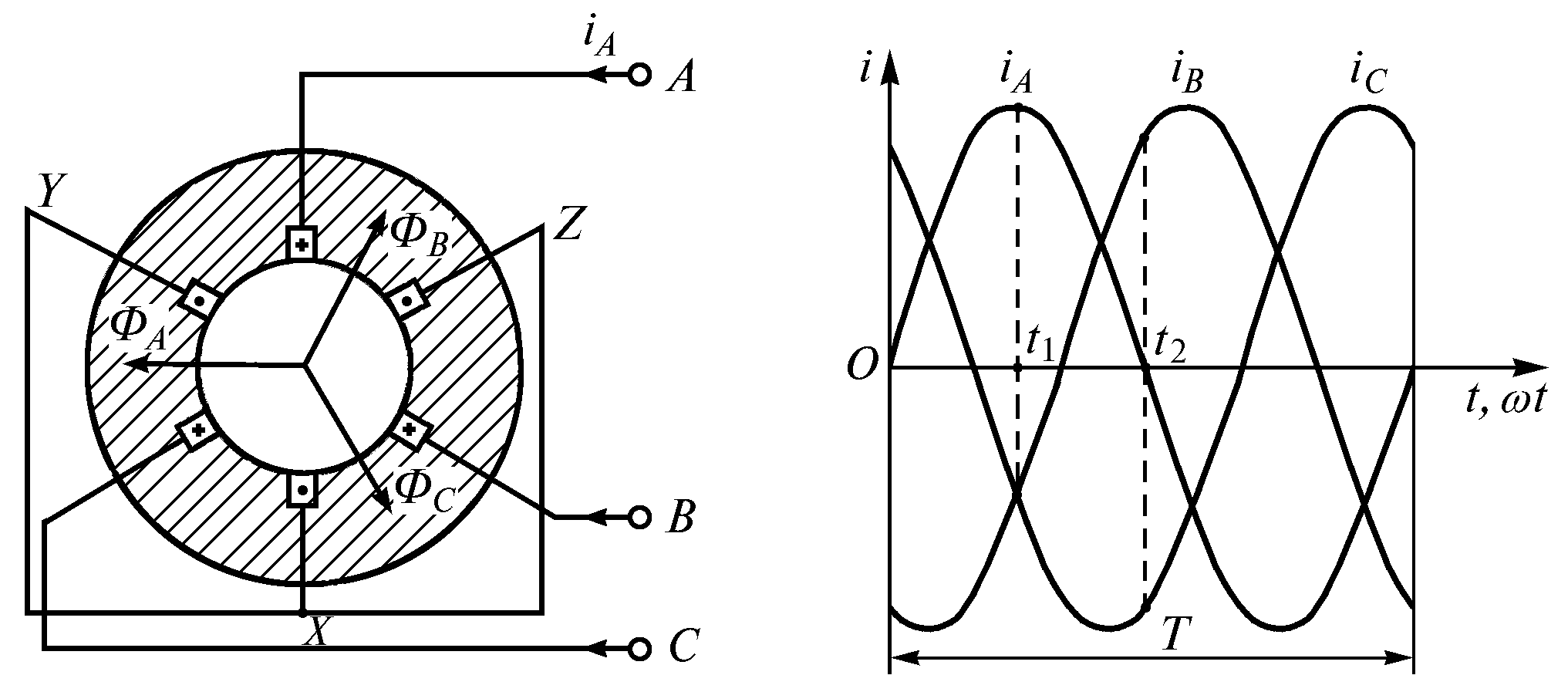 Isaalang-alang ang pagkuha ng umiikot na field sa isang three-phase na motor. Sa fig. Ang 1 ay nagpapakita ng tatlong phase windings A–
X,
B
– Y,
C
– Z, bawat isa sa anyo ng isang solong likid. Ang isang three-phase system ng mga alon ay ibinibigay mula sa pinagmumulan ng kapangyarihan hanggang sa mga paikot-ikot
Isaalang-alang ang pagkuha ng umiikot na field sa isang three-phase na motor. Sa fig. Ang 1 ay nagpapakita ng tatlong phase windings A–
X,
B
– Y,
C
– Z, bawat isa sa anyo ng isang solong likid. Ang isang three-phase system ng mga alon ay ibinibigay mula sa pinagmumulan ng kapangyarihan hanggang sa mga paikot-ikot  ;
;![]() ;
; .
.
Kung ang mga phase ng stator winding ay konektado sa isang 3-phase mains current, ang mga alon ay lumabas na lumikha ng isang magnetic field na may induction:  ;
; ;. Ang bahagi ng field induction sa kahabaan ng X axis ay katumbas ng algebraic sum ng mga projection sa axis na ito ng mga agarang halaga ng mga induction ng mga indibidwal na phase, i.e.
;. Ang bahagi ng field induction sa kahabaan ng X axis ay katumbas ng algebraic sum ng mga projection sa axis na ito ng mga agarang halaga ng mga induction ng mga indibidwal na phase, i.e.
 . Katulad nito, nakita namin ang projection sa Y axis.
. Katulad nito, nakita namin ang projection sa Y axis.  . Bilang resulta, ang magnetic induction ng stator field ay katumbas ng:
. Bilang resulta, ang magnetic induction ng stator field ay katumbas ng:
Ang magnetic field induction ay const, at ang stator field mismo ay may mga projection sa X at Y axes, ayon sa pagkakabanggit: 
Ang V-o induction ng cut-th field ay matatagpuan sa isang anggulo sa y-axis 
 ,
,
 , kung saan ang T ay ang panahon ng kasalukuyang pagbabago,
, kung saan ang T ay ang panahon ng kasalukuyang pagbabago,  -cyclic frequency
-cyclic frequency
Sa ganitong paraan, three-phase winding, na pinapakain ng mga alon na inilipat ng 120°, ay lumilikha ng umiikot na magnetic field. Ang resultang daloy ay nananatiling hindi nagbabago at katumbas ng 1.5 ng maximum na daloy ng phase. Ang direksyon ng flux na ito ay palaging tumutugma sa direksyon ng magnetic flux ng phase kung saan ang kasalukuyang ay pinakamataas sa ibinigay na sandali. Samakatuwid, upang baguhin ang direksyon ng pag-ikot, kinakailangan na magpalit ng anumang dalawang yugto.
Ang mga halimbawang isinasaalang-alang ay tumutukoy sa isang two-pole winding design () sa isang field rotation frequency. Sa pangkalahatang kaso, ang dalas ng pag-ikot ng field, kung saan ang bilang ng mga pares ng mga pole ng makina; ay ang dalas ng kasalukuyang stator.
Halaga o  tinawag dumudulas asynchronous machine, kung saan
tinawag dumudulas asynchronous machine, kung saan  - dalas ng pag-ikot ng patlang ng stator,
- dalas ng pag-ikot ng patlang ng stator,  - dalas ng pag-ikot ng rotor.
- dalas ng pag-ikot ng rotor.
Depende sa ratio at mayroong tatlong mga mode ng operasyon: sa engine mode; sa generator mode; sa electromagnetic brake mode.
Magtrabaho sa engine mode. Ang mga electromagnetic na puwersa ng pakikipag-ugnayan ng magnetic field ng stator at rotor ay lumikha ng isang metalikang kuwintas sa direksyon ng pag-ikot ng stator field. Ang bilis ng pag-ikot ng motor ay depende sa pagkarga nito. Sa idle, ang bilis ay nagiging halos pantay, dahil sa = 0 ang EMF at ang mga alon sa rotor ay zero at ang electromagnetic na pakikipag-ugnayan ay nawawala. Kaya, ang asynchronous na makina ay gumagana sa motor mode sa loob ng saklaw mula sa = 0 hanggang, i.e. kapag dumudulas mula sa +1 hanggang 0. Sa kasong ito, ang elektrikal na enerhiya na ibinibigay sa stator mula sa network ay na-convert sa mekanikal na enerhiya sa baras.
Magtrabaho sa generator mode. Ipagpalagay natin na ang stator na konektado sa network ay lumilikha ng isang umiikot na magnetic field, at ang rotor ay hinihimok sa parehong direksyon na may bilis. Sa kasong ito, ang slip ay magiging negatibo, at ang EMF at rotor currents ay magbabago ng direksyon kumpara sa operasyon sa motor mode. Ang metalikang kuwintas sa baras ay nagiging pagpepreno na may kaugnayan sa metalikang kuwintas ng prime mover. Ang isang asynchronous na makina ay gumagana bilang isang generator. Ang mekanikal na enerhiya na ibinibigay sa baras ay na-convert sa elektrikal na enerhiya at inilipat sa network. Kaya, ang isang asynchronous na makina ay maaaring gumana sa generator mode na kahanay sa network sa loob ng mga limitasyon ng otdo, i.e. kapag dumudulas  dati.
dati.
Magtrabaho sa electromagnetic brake mode. Ipagpalagay natin na ang rotor ay hinihimok laban sa direksyon ng pag-ikot ng stator magnetic flux. Sa kasong ito, ang enerhiya ay ibinibigay sa asynchronous na makina mula sa dalawang panig - elektrikal mula sa network at mekanikal mula sa prime mover. Ang mode ng operasyon na ito ay tinatawag na electromagnetic brake mode. Ito ay nangyayari kapag dumudulas mula sa.
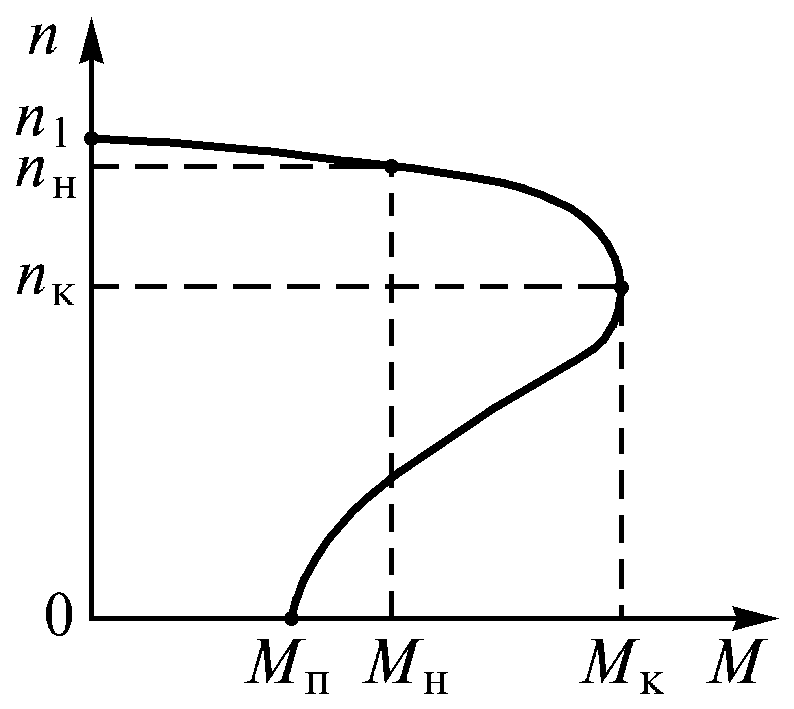
 - maximum na metalikang kuwintas
- maximum na metalikang kuwintas
 - Panimulang metalikang kuwintas
- Panimulang metalikang kuwintas
 - nominal na sandali
- nominal na sandali
Ang mekanikal na katangian ng makina ay ang pag-asa ng bilis ng rotor sa metalikang kuwintas sa baras. Dahil ang idle moment ay maliit sa ilalim ng pagkarga, ang mekanikal na katangian ay kinakatawan ng isang pagtitiwala. Kung isasaalang-alang natin ang relasyon, kung gayon mekanikal na katangian ay maaaring makuha sa pamamagitan ng paglalahad ng graphical dependence nito sa mga coordinate
Ang isang asynchronous na makina ay may stator at rotor na pinaghihiwalay ng air gap. Ang mga aktibong bahagi nito ay windings at magnetic circuit (core); ang lahat ng iba pang mga bahagi ay istruktura, na nagbibigay ng kinakailangang lakas, katigasan, paglamig, ang posibilidad ng pag-ikot, atbp.
Ang stator winding ay isang three-phase (sa pangkalahatan, multi-phase) na paikot-ikot, ang mga conductor na kung saan ay pantay na ipinamamahagi sa paligid ng circumference ng stator at inilatag phase sa pamamagitan ng phase sa grooves na may isang angular na distansya ng 120 °. Ang mga phase ng stator winding ay konektado ayon sa karaniwang "triangle" o "star" na mga scheme at konektado sa isang three-phase na kasalukuyang network. Ang stator magnetic circuit ay remagnetize sa proseso ng pagbabago ng kasalukuyang sa stator winding, kaya ito ay hinikayat mula sa mga de-koryenteng steel plate upang matiyak ang minimal na pagkalugi ng magnetic. Ang pangunahing paraan ng pag-assemble ng magnetic circuit sa isang pakete ay blending.
Ayon sa disenyo ng rotor, ang mga asynchronous na makina ay nahahati sa dalawang pangunahing uri: may short-circuited rotor at yugto rotor. Ang parehong mga uri ay may parehong disenyo ng stator at naiiba lamang sa disenyo ng rotor winding. Ang rotor magnetic circuit ay ginawa katulad ng stator magnetic circuit - mula sa mga de-koryenteng steel plate.
asynchronous na makina- isang alternating kasalukuyang electric machine, ang bilis ng rotor na kung saan ay hindi katumbas (sa motor mode mas mababa) sa dalas ng pag-ikot ng magnetic field na nilikha ng stator winding current.
Sa ilang bansa, inuri rin ang mga commutator machine bilang mga asynchronous na makina. Ang isa pang pangalan para sa mga asynchronous na makina ay pagtatalaga sa tungkulin dahil sa ang katunayan na ang kasalukuyang sa rotor winding ay sapilitan ng umiikot na patlang ng stator. Ang mga asynchronous na makina ngayon ay bumubuo sa karamihan ng mga de-koryenteng makina. Pangunahing ginagamit ang mga ito bilang mga de-koryenteng motor at pangunahing nagko-convert ng enerhiyang elektrikal sa enerhiyang mekanikal, at pangunahing ginagamit mga asynchronous na motor na may squirrel-cage rotor (ADKZ).
Mga Bentahe (para sa ADKZ):
- Dali ng paggawa.
- Relatibong mura.
- Mataas na pagiging maaasahan sa pagpapatakbo.
- Mababang gastos sa pagpapatakbo.
- Kakayahang kumonekta sa network nang walang anumang mga converter (para sa mga load na hindi nangangailangan ng kontrol sa bilis).
Ang lahat ng mga pakinabang sa itaas ay bunga ng kawalan ng mga mechanical commutator sa rotor circuit at humantong sa katotohanan na karamihan sa mga de-koryenteng motor na ginagamit sa industriya ay mga asynchronous na makina, na ginawa ng ADKZ.
Bahid:
- Maliit na panimulang sandali.
- Makabuluhang panimulang kasalukuyang.
- Mababang power factor.
- Ang pagiging kumplikado ng kontrol ng bilis na may kinakailangang katumpakan.
- Ang maximum na bilis ng motor ay nililimitahan ng dalas ng mains (para sa ADKZ na direktang pinapagana mula sa tatlong-phase na network Ang 50 Hz ay 3000 rpm).
- Malakas na pag-asa (quadratic) ng electromagnetic torque sa supply boltahe (kapag ang boltahe ay nagbabago ng 2 beses, ang metalikang kuwintas ay nagbabago ng 4 na beses; sa DCTs, ang metalikang kuwintas ay nakasalalay sa armature supply boltahe sa unang antas, na mas kanais-nais) .
Ang pinakaperpektong diskarte upang maalis ang mga disadvantages sa itaas ay ang pagpapagana ng motor sa pamamagitan ng isang frequency converter, kung saan ang kontrol ay isinasagawa ayon sa mga kumplikadong algorithm.
Pinapayuhan ka naming basahin
 Mga sikolohikal na katangian ng mga bata sa pagdadalaga
Mga sikolohikal na katangian ng mga bata sa pagdadalaga Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan
Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan, diagnosis, paggamot Paggamot ng urogenital chlamydia") Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia
Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano

