Ang kahanga-hangang kapangyarihan ng isang asynchronous na de-koryenteng motor, na nagbabago ng kuryente sa paikot na enerhiya, ay hindi nilikha dahil sa anumang mga mekanikal na bahagi: para sa gayong malakas na pag-ikot, ang mga electromagnet lamang ang ginagamit sa "pagpupuno nito".
Induction motor rotor: disenyo
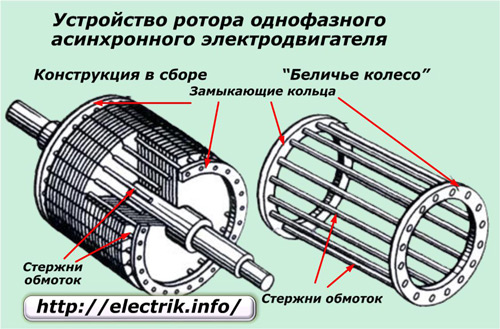
Rotor - isang elemento ng isang de-koryenteng motor na umiikot sa loob ng stator (nakapirming bahagi), ang baras na kung saan ay konektado sa mga bahagi ng mga yunit ng pagtatrabaho, halimbawa, saws, turbines at pump. Ang laminated core ay ginawa mula sa mga indibidwal na plates ng electrical steel na may semi-closed o open grooves.
Ang motor ay isang electromechanical device na nagpapalit ng elektrikal na enerhiya sa mekanikal na enerhiya. at ang tatlong-phase na motor na tumatakbo sa kasabay na bilis ay tinatawag na isang kasabay na motor. Kapag ang dalawang magkasalungat na poste ay magkalapit sa isa't isa, kung ang mga magnet ay malakas, mayroong isang malaking puwersa ng pagkahumaling sa pagitan ng dalawang poste. Sa ganitong estado, dalawang magnet ang tinatawag na magnetic.
Prinsipyo ng sabaysabay na pag-ikot
Paano umiikot ang rotor sa kasabay na bilis? Ngayon, upang maunawaan ang konsepto ng kasabay na operasyon ng motor, isaalang-alang ang isang dalawang-pol na simpleng rotor. Ang kasabay na motor ay isang double excited machine na may dalawang electrical input na nakakabit. Samakatuwid, ang isang kasabay na motor ay umiikot sa isa at isang bilis lamang, ibig sabihin, kasabay na bilis. Ngunit ang lahat ng ito ay nakasalalay sa pagkakaroon ng magnetic locking sa pagitan ng stator at rotor pole. Halos imposible para sa mga stator pole na hilahin ang rotor pole mula sa kanilang nakatigil na posisyon sa isang magnetically latched state. ito ang dahilan kung bakit ang mga kasabay na motor ay hindi nagsisimula sa kanilang sarili.
Ang napakalaking rotor ay isang solidong silindro ng bakal na inilagay sa loob ng stator, na may isang core na pinindot sa ibabaw nito.
Contactless, hindi konektado sa anumang panlabas de-koryenteng circuit ang rotor winding ay lumilikha ng torque at may dalawang uri:
- short-circuited (short-circuited rotor);
- phase (phase rotor).
rotor ng squirrel-cage
Highly conductive tanso (para sa mga makina ng mataas na kapangyarihan) o aluminum rods (para sa mga makina ng mas mababang kapangyarihan) soldered o poured sa ibabaw ng core at short-circuited mula sa mga dulo na may dalawang singsing ay gumaganap ang papel na ginagampanan ng electromagnets na may mga pole nakaharap sa stator. Ang disenyo na ito ay tinatawag na "squirrel cage", na ibinigay dito ng Russian electrical engineer na M. O. Dolivo-Dobrovolsky.
Mga pamamaraan para sa pagsisimula ng isang kasabay na motor. Pagkaraan ng ilang sandali, kapag nangyayari ang magnetic blocking, ang supply sa panlabas na motor ay pinutol mula sa clutch. Paglalapat ng mga kasabay na motor. Ginagamit ito kung saan kinakailangan ang mataas na kapangyarihan sa patuloy na bilis.
Dahil ang isang kasabay na motor ay may kakayahang parehong nangunguna at nahuhuli na mga salik ng kapangyarihan, maaari itong magamit upang mapabuti ang kadahilanan ng kapangyarihan. Ang isang unloaded na kasabay na motor na may nangungunang power factor ay konektado sa isang power system kung saan hindi magagamit ang mga static na capacitor.
Ang mga paikot-ikot na rod ay walang anumang pagkakabukod, dahil ang boltahe sa naturang paikot-ikot ay zero. Mas karaniwang ginagamit para sa medium power motor rods, ang madaling natutunaw na aluminyo ay nailalarawan sa mababang density at mataas na electrical conductivity. Upang bawasan ang mas mataas na harmonika ng electromotive force (EMF) at alisin ang ripple magnetic field, ang mga rotor rod ay may isang tiyak na kinakalkula na anggulo ng pagkahilig na may kaugnayan sa axis ng pag-ikot.
Rotary rotor induction motor na disenyo
Ang kasabay na motor ay nakakahanap ng aplikasyon kung saan ang bilis ng pagpapatakbo ay mas mababa at ang mataas na kapangyarihan ay kinakailangan. Sa aking huling artikulo, tinalakay namin kung anong uri. Ang makinang ito ay ang gumagamit ng rotor ng sugat. Rotary rotor asynchronous motor ay kilala rin bilang asynchronous na motor madulas. Tulad ng iba pang mga induction motor, ang mga pangunahing bahagi ay ang stator at rotor. Ang stator ng motor na ito ay kapareho ng sa induction motors na may rotor ng squirrel-cage. Ang rotor ay ang bahagi na nagpapaiba sa iba pang mga induction motor.
Sa mga low-power engine, ang mga core grooves, bilang panuntunan, ay sarado: paghihiwalay ng rotor mula sa air gap - isang steel plate ay nagbibigay-daan sa iyo upang dagdagan ang pag-aayos ng mga windings, ngunit sa gastos ng ilang pagtaas sa kanilang inductive resistance.
phase rotor
Ito ay nailalarawan sa pamamagitan ng halos walang pagkakaiba mula sa three-phase stator winding (sa higit pa pangkalahatang kaso- multi-phase) paikot-ikot na inilatag sa mga grooves ng core, ang mga dulo nito ay konektado ayon sa "star" scheme. Ang paikot-ikot na mga lead ay konektado sa mga contact ring na naayos sa rotor shaft, kung saan, kapag ang engine ay nagsimula, ang mga nakatigil na graphite o metal-graphite brush na konektado sa rheostat ay pinindot at dumudulas.
Wound rotator induction motor stator
Hayaan mong bigyan kita ng maikling pagpapakilala sa stator at pagkatapos ay sabihin sa iyo ang tungkol sa istraktura ng rotor.
Wound rotator induction motor rotor
Sa isang rotary rotor induction motor, ang rotor ay may three-phase winding katulad ng paikot-ikot na stator. Ang paikot-ikot ay inilalagay nang pantay-pantay sa mga grooves ng rotor. konektado sa 3 slip ring. Ang lahat ay tungkol sa pagtatayo ng rotor. Ngayon talakayin natin kung paano ito gumagana.Ang pagpapatakbo ng isang induction motor na may rotor ng sugat
Ang stator magnetic field at ang rotor magnetic field ay nakikipag-ugnayan at nagreresulta sa isang torque na magpapaikot sa rotor.- Ang rotor ay cylindrical din at may mga paikot-ikot na butas.
- Ang mga slip ring na ito ay naka-mount sa baras.
- Ang bawat yugto ay konektado sa isa sa tatlong slip ring.
- Ang mga slip ring na ito ay konektado sa mga brush.
- Ang tatlong slip ring ay umiikot sa rotor habang ang mga kamay ay nananatiling nakatigil.
- Ang magnetic field na ito ay tinatawag na magnetic field ng rotor.
Upang limitahan ang mga nagresultang eddy currents, ang isang oxide film na inilapat sa ibabaw ng windings ay karaniwang sapat, sa halip na insulating varnishes.
Ang isang three-phase na panimulang o pagsasaayos ng risistor na idinagdag sa rotor winding circuit ay nagbibigay-daan sa iyo na baguhin ang aktibong paglaban ng rotor circuit, na tumutulong upang mabawasan ang mataas na panimulang alon. Maaaring gamitin ang mga rheostat:
Ang bilis at metalikang kuwintas ay maaaring kontrolin sa mga motor na ito sa pamamagitan ng pagbabago ng paglaban. Ang ilan sa mga katangian ng rotary rotor induction motors ay ipinakita sa ibaba. Ang Wound Rotor induction motor ay nangangailangan ng karagdagang pagpapanatili dahil sa madulas at mga brush. Ang motor na ito ay gumagamit ng mas kaunting kasalukuyang sa simula kumpara sa squirrel-cage induction motors. Ang rotary rotor induction motor ay hindi gaanong mahusay kaysa sa squirrel-cage induction motors.
- Maaari mong kontrolin ang bilis ng mga motor na ito.
- Makokontrol din ang sandali.
- Ang mga motor na ito ay may mataas na panimulang torque.
- Ang mga naturang motor ay mas mahal kaysa sa iba pang mga induction motor.
- Ang mga gastos sa pagpapanatili ay isinasaalang-alang din.
- Ang mga motor na ito ay may mababang power factor.
- metal wire o stepped - na may manu-mano o awtomatikong paglipat mula sa isang antas ng paglaban sa isa pa;
- likido, ang paglaban nito ay kinokontrol ng lalim ng paglulubog sa electrolyte ng mga electrodes.
Upang madagdagan ang tibay ng mga brush, ang ilang mga modelo ng phase rotors ay nilagyan ng isang espesyal na mekanismo ng squirrel-cage na nagpapataas ng mga brush pagkatapos simulan ang motor at isara ang mga singsing.
At kung saan ang squirrel-cage induction motors ay hindi maaaring gamitin dahil sa kanilang mataas na panimulang alon. Ang sugat rotor induction motor ay ginagamit sa mga application na nangangailangan ng malambot na pagsisimula at variable na bilis. Ang ilan sa mga aplikasyon para sa makinang ito ay kinabibilangan ng mga crane, mill, hoists at conveyor. Ang rotary rotor induction motor ay ginagamit din sa mga fan, blower at mixer. Ginagamit ang mga ito sa malalaking bomba sa industriya ng tubig.
- Ginagamit ang mga ito sa mga lugar kung saan kinakailangan ang mataas na panimulang torque.
- Ang mga motor na ito ay ginagamit na may mataas na inertial load.
Ang mga asynchronous na motor na may isang phase rotor ay nailalarawan sa pamamagitan ng isang mas kumplikadong disenyo kaysa sa isang squirrel-cage, ngunit sa parehong oras, mas pinakamainam na mga katangian ng pagsisimula at kontrol.
Prinsipyo ng operasyon
Ang mga electromagnet ng stator ay matatagpuan malapit sa mga rotor bar at nagpapadala ng kuryente sa kanila upang paikutin ito. Ang magnetic field na sapilitan sa rotor ay susundan ang magnetic field ng stator, kaya isinasagawa ang mekanikal na pag-ikot ng rotor shaft at mga nauugnay na unit. Kasabay nito, ang electromagnetic induction na nilikha ng stator coils ay itinutulak ang kasalukuyang sa mga rod na mahigpit na palayo sa sarili nito. Ang halaga ng kasalukuyang sa mga rod ay nagbabago sa paglipas ng panahon.
Ginagamit ang mga ito sa iba't ibang mga pang-industriya na aplikasyon ngunit maaaring protektahan mula sa iba't ibang mga panganib tulad ng mga mekanikal na electrical fault upang matulungan ang kanilang mga layunin. Tinatalakay ng artikulong ito ang sistema para sa pagprotekta sa mga asynchronous na motor mula sa mga nagaganap na pagkabigo. Ang motor na ito ay nararanasan iba't ibang uri electrical faults tulad ng overvoltage, under voltage, overload, unbalanced voltage, phase ground fault at single phase. Ang mga electrical fault na ito ay nagiging sanhi ng pag-init ng mga windings ng motor, na nagreresulta sa pagbawas ng buhay ng motor.
Sumulat ng mga komento, mga karagdagan sa artikulo, marahil ay may napalampas ako. Tingnan mo, matutuwa ako kung makakita ka ng ibang bagay na kapaki-pakinabang sa aking site. Lahat ng pinakamahusay.
Ang mismong pangalan ng de-koryenteng aparatong ito ay nagpapahiwatig na Enerhiya ng kuryente, na nakarating dito, ay na-convert sa umiinog na paggalaw rotor. Bukod dito, ang pang-uri na "asynchronous" ay nagpapakilala sa pagkakaiba, ang lag ng mga bilis ng pag-ikot ng armature mula sa stator magnetic field.
Ang antas ng isang induction motor ay nakasalalay sa mga gastos at tampok ng motor. Ang sistema ng direksyon ay idinisenyo upang protektahan ang asynchronous na motor mula sa overheating at single-phase. Ang sistema ng proteksyon gamit ang maraming motor para sa produksyon ay napakahalaga sa mga industriya.
Ang pangunahing plano ng disenyo para sa proyektong ito ay upang matiyak ang kaligtasan sa mga industriya. Kung ang temperatura ng motor sa panahon ng proseso ay lumampas sa halaga ng threshold, ang motor ay hihinto nang walang pagkaantala. Gumagamit ang system ng 3-phase power supply kung saan nakakonekta ang 3-phase transformer. Kung ang alinman sa mga phase ay hindi magagamit, pagkatapos ay ang katumbas na transpormer ay nagtatapos, na nagbibigay ng kapangyarihan sa circuit.
Ang salitang "single-phase" ay nagdudulot ng hindi tiyak na kahulugan. Ito ay dahil sa ang katunayan na sa mga electric ay tinutukoy nito ang ilang mga phenomena:
shift, pagkakaiba ng anggulo sa pagitan ng mga dami ng vector;
potensyal na konduktor dalawa, tatlo o apat na wire de-koryenteng circuit alternating current;
isa sa stator o rotor windings tatlong-phase na motor o isang generator.
Ang pangunahing relay ay pinapagana sa pamamagitan ng isang set ng 4-relays, na hindi nakakonekta dahil sa ang katunayan na ang isang relay ay hindi kinokontrol ng power supply. Kaya, ang pangunahing relay ay nagbibigay ng tatlong-phase na kapangyarihan sa motor, na naka-off. Ang thermistor ay konektado sa katawan ng induction motor upang maramdaman ang temperatura. Kung ang temperatura ay tumaas, ang ika-4 na relay ay de-energized.
Dagdag pa, ang proyektong ito ay maaaring mabuo gamit ang mga kasalukuyang sensor para sa overload na proteksyon at isang phase sequence sensor upang protektahan ang motor mula sa maling phase sequence. Kaya, ang lahat ng ito ay may kinalaman sa sistema ng proteksyon ng mga asynchronous na motor. Umaasa kaming mas naiintindihan mo ang konseptong ito.
Kaya naman, agad naming nilinaw iyon single-phase electric motor ito ay kaugalian na tawagan ang isa na gumagana mula sa dalawang-kawad na network alternating current, na kinakatawan ng phase at zero na potensyal. Ang bilang ng mga windings na naka-mount sa iba't ibang mga disenyo ng stator ay hindi nakakaapekto sa pagpapasiya na ito.
Disenyo ng motor
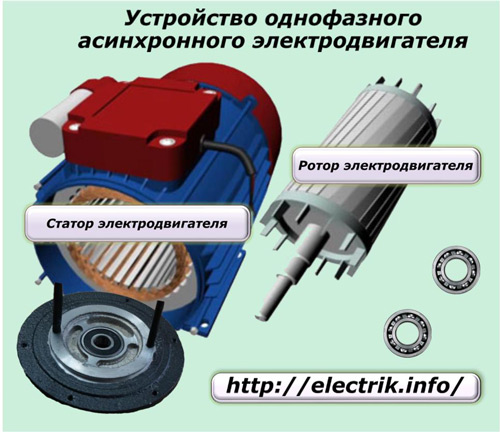
Ayon sa teknikal na aparato nito, ang isang asynchronous na motor ay binubuo ng:
Ang paggamit ng isang phase-shifting winding sa stator
Ang mga pangunahing katangian nito ay: Pagkakaaasahan Mababang halaga ng pagkuha at pagpapanatili Posibilidad ng kontrol sa bilis. Mga sapatos na pangbabae at compressor Tagahanga Mga milling machine Mga treadmill, conveyor at elevator Mga gilingan at gilingan Mga lagari, lathe at gilingan.
Ang operasyon ng lahat ng mga de-koryenteng motor, kabilang ang tatlong-phase na asynchronous na motor, ay batay sa magnetic field na nilikha ng electric current na nagpapalipat-lipat sa mga windings ng makina. Tulad ng para sa three-phase induction motor, mayroon itong tatlong windings sa isang istraktura na tinatawag na stator.
1. stator - isang static, nakapirming bahagi, na ginawa ng isang katawan na may iba't ibang mga elemento ng kuryente na matatagpuan dito;
2. isang rotor na pinaikot ng mga puwersa ng electromagnetic field ng stator.
Ang mekanikal na koneksyon ng dalawang bahagi na ito ay ginawa sa pamamagitan ng mga bearings ng pag-ikot, ang mga panloob na singsing na kung saan ay nakaupo sa mga fitted sockets ng rotor shaft, at ang mga panlabas na singsing ay naka-mount sa mga protective side cover na naayos sa stator.
Ang nagreresultang magnetic field na nabuo ng bawat electric current ay umiikot sa kalikasan at sa pare-parehong bilis. Paano natin mahahanap ang resultang field? Kapag ang isang coil ay hinihimok ng isang electric current, ang isang magnetic field ay nilikha kasama ang axis ng coil at may isang halaga na proporsyonal sa kasalukuyang.
Ang three-phase winding ay binubuo ng tatlong single-phase na 120 ohm spacer. Ang mga patlang na ito ay matatagpuan sa layo na 120 degrees mula sa bawat isa. Ang magnetic field na ito ay umaakit sa isang gumagalaw na istraktura na tinatawag na rotor, na nagiging sanhi ng pag-ikot nito. Ang kasabay na bilis ng umiikot na field ay ibinibigay bilang mga sumusunod.
rotor
Ang aparato nito para sa mga modelong ito ay kapareho ng para sa lahat ng mga asynchronous na motor: isang magnetic circuit ay naka-mount sa isang bakal na baras na gawa sa mga nakalamina na plato batay sa malambot na mga haluang bakal. Sa panlabas na ibabaw nito, ang mga grooves ay ginawa kung saan ang mga paikot-ikot na rod na gawa sa aluminyo o tanso ay naka-mount, pinaikli sa mga dulo sa pagsasara ng mga singsing.
Ang pinakakaraniwang halaga ng pole ay 2, 4, 6 o 8 pole. Ang gumagalaw na bahagi, na tinatawag na rotor, ay responsable para sa paghahatid mekanikal na paggalaw sa isang load tulad ng elevator. Malinaw, ang lahat ng mga aparato na interesado sa akin ay nilagyan ng isang asynchronous na motor.
Prinsipyo at pagpapatakbo ng isang induction motor
Ano ang mga pakinabang ng ganitong uri ng makina? Narito ang ilang mga sagot. Ang induction motor ay isang high performance na motor na kadalasang ginagamit sa larangan ng transportasyon, industriya at mga kasangkapan sa sambahayan. Binubuo ng dalawang magkahiwalay na bahagi na tinatawag na rotor at stator, ang induction motor ay may utang sa pangalan nito sa pagkakaiba sa kapangyarihan na sinusukat sa bawat isa sa mga bahaging ito. Sa katunayan, kahit na ang stator ay umiikot sa isang tiyak na bilis na tinutukoy ng electric current, ang rotor, samantala, ay bumubuo ng sarili nitong magnetic field at may sariling bilis ng pag-ikot, na hindi proporsyonal sa bilis ng stator.
dumadaloy sa rotor winding kuryente, sapilitan ng magnetic field ng stator, at ang magnetic circuit ay nagsisilbi sa magandang pagpasa ang magnetic flux na nilikha dito.
Ang mga hiwalay na disenyo ng rotor para sa mga single-phase na motor ay maaaring gawin ng mga non-magnetic o ferromagnetic na materyales sa anyo ng isang silindro.
Asynchronous na motor at food processor
Ang pagkakaibang ito, na tinatawag na phase shift, ay karaniwang nasa pagitan ng 2 at 10%. Ang induction motor ay malawakang ginagamit sa mundo ng appliance sa bahay, pangunahin para sa mga washing machine, dishwasher at dryer. Ang ganitong uri ng motor ay napakalakas at nagbibigay ng medyo tahimik na operasyon. Sa kaso ng mga robot sa bahay, ang pagkakaroon ng induction motor ay may mahalagang bentahe: dahil ang dalawang bahagi ng motor ay umiikot sa magkaibang bilis, ang mga blades ng robot ay maaaring iakma ang kanilang bilis sa mga nilalaman sa mangkok mismo kapag ang aparato ay tumatakbo nang buo. kapangyarihan.
stator
Ang disenyo ng stator ay ipinakita din:
katawan;
magnetic circuit;
paikot-ikot.
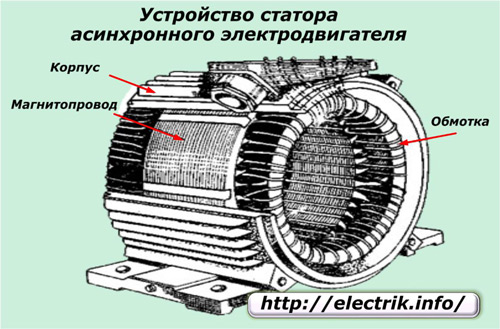
Ang pangunahing layunin nito ay upang makabuo ng isang nakatigil o umiikot na electromagnetic field.
Ang stator winding ay karaniwang binubuo ng dalawang circuits:
Sa madaling salita, mas siksik ang pagluluto, mas mabagal ang pag-ikot ng robot, kahit na ito ay nakatakda pinakamataas na kapangyarihan. Nag-aalok din ang asynchronous na motor ng posibilidad na iakma ang bilis ng device sa dami ng mga produkto na nasa lalagyan. Sa madaling salita: ang mga robot na may asynchronous na motor ay mga matatalinong robot. Isa pang makabuluhang bentahe: ang asynchronous na motor ng mga robot sa bahay ay ginagawang mas tahimik ang mga device na ito. Pamantayan sa pagpili para sa pagluluto ng Linggo ng umaga nang hindi ginigising ang buong bahay!
1. manggagawa;
2. launcher.
Para sa pinakasimpleng disenyo, na idinisenyo para sa manu-manong pag-unwinding ng armature, isang paikot-ikot lang ang maaaring gawin.
Ang prinsipyo ng pagpapatakbo ng isang asynchronous single-phase electric motor
Upang gawing simple ang pagtatanghal ng materyal, isipin natin na ang stator winding ay ginawa sa isang pagliko lamang ng loop. Ang mga wire nito sa loob ng stator ay dinadala sa isang bilog sa pamamagitan ng 180 angular degrees. Ang isang alternating sinusoidal current ay dumadaan dito, na may positibo at negatibong kalahating alon. Lumilikha ito hindi isang umiikot, ngunit isang pulsating magnetic field.
Paano nangyayari ang mga pulsation ng magnetic field
Suriin natin ang prosesong ito gamit ang halimbawa ng daloy ng isang positibong kasalukuyang kalahating alon sa mga oras na t1, t2, t3.
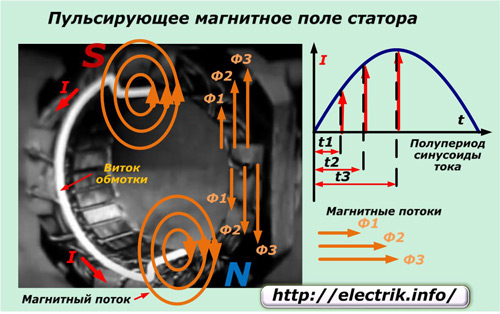
Tumatakbo ito sa itaas na bahagi ng konduktor patungo sa amin, at sa ibabang bahagi palayo sa amin. Sa perpendicular plane na kinakatawan ng magnetic circuit, ang mga magnetic flux F ay bumangon sa paligid ng conductor.
Ang mga alon na nagbabago sa amplitude sa isinasaalang-alang na mga sandali ng oras ay lumilikha ng mga electromagnetic na larangan ng iba't ibang magnitude F1, F2, F3. Dahil ang kasalukuyang sa itaas at ibabang kalahati ay pareho, ngunit ang likid ay baluktot, ang mga magnetic flux ng bawat bahagi ay nakadirekta sa tapat at kanselahin ang pagkilos ng bawat isa. Maaari mong matukoy ito sa pamamagitan ng panuntunan ng gimlet o kanang kamay.
Tulad ng nakikita mo, na may positibong kalahating alon ng pag-ikot, ang magnetic field ay hindi sinusunod, ngunit ang pulsation lamang nito ay nangyayari sa itaas at ibabang bahagi ng wire, na kapwa balanse sa magnetic circuit. Ang parehong proseso ay nangyayari sa negatibong seksyon ng sinusoid, kapag ang mga alon ay nagbabago ng direksyon sa kabaligtaran.
Dahil walang umiikot na magnetic field, ang rotor ay mananatiling nakatigil, dahil walang mga puwersa na inilalapat dito upang simulan ang pag-ikot.
Paano nilikha ang pag-ikot ng rotor sa isang pulsating field
Kung ibibigay natin ngayon ang pag-ikot ng rotor, kahit na sa pamamagitan ng kamay, pagkatapos ay ipagpapatuloy nito ang paggalaw na ito.
Upang ipaliwanag ang hindi pangkaraniwang bagay na ito, ipinapakita namin na ang kabuuang magnetic flux ay nagbabago sa dalas ng kasalukuyang sinusoid mula sa zero hanggang sa isang maximum na halaga sa bawat kalahating cycle (na may pagbabago sa direksyon sa kabaligtaran) at binubuo ng dalawang bahagi na nabuo sa itaas at mas mababang mga sanga, tulad ng ipinapakita sa figure.
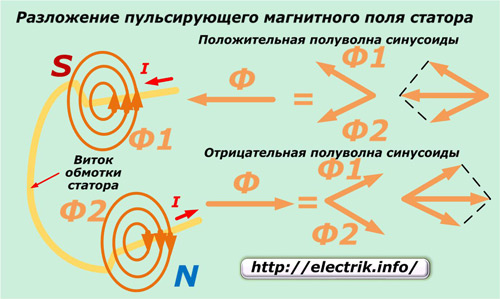
Ang magnetic pulsating field ng stator ay binubuo ng dalawang pabilog na may amplitude Фmax/2 at gumagalaw sa magkasalungat na direksyon na may parehong dalas.
npr=nrev=f60/p=1.
Ang formula na ito ay nagpapahiwatig ng:
npr at nrev ng dalas ng pag-ikot ng stator magnetic field sa pasulong at pabalik na direksyon;
n1 ay ang bilis ng umiikot na magnetic flux (rpm);
p ay ang bilang ng mga pares ng mga pole;
f ay ang dalas ng kasalukuyang sa stator winding.
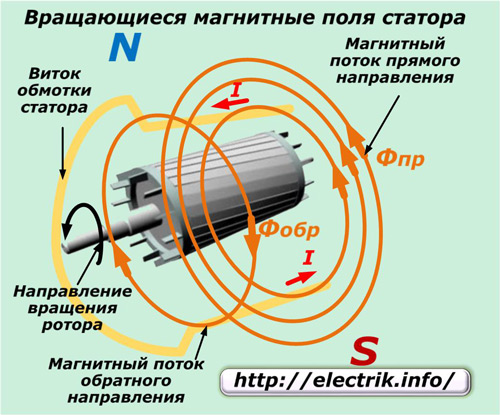
Ngayon ay ibibigay namin ang pag-ikot ng motor sa pamamagitan ng kamay sa isang direksyon, at agad nitong kukunin ang paggalaw dahil sa paglitaw ng isang umiikot na sandali na sanhi ng pag-slide ng rotor na may kaugnayan sa iba't ibang mga magnetic flux ng pasulong at pabalik na direksyon.
Ipagpalagay natin na ang magnetic flux ng pasulong na direksyon ay tumutugma sa pag-ikot ng rotor, at ang reverse, ayon sa pagkakabanggit, ay magiging kabaligtaran. Kung tinutukoy natin sa pamamagitan ng n2 ang dalas ng pag-ikot ng armature sa rpm, maaari nating isulat ang expression na n2< n1.
Sa kasong ito, tinutukoy namin ang Spr \u003d (n1-n2) / n1 \u003d S.
Dito, ang mga indeks S at Spr ay ang mga slip ng induction motor at ang rotor ng kamag-anak na magnetic flux ng pasulong na direksyon.
Para sa reverse flow, ang sliding Srev ay ipinahayag ng isang katulad na formula, ngunit may pagbabago ng sign n2.
Srev \u003d (n1 - (-n2)) / n1 \u003d 2-Spr.
Alinsunod sa batas ng electromagnetic induction, sa ilalim ng pagkilos ng direkta at reverse magnetic fluxes sa rotor winding, puwersang electromotive, na lilikha sa loob nito ng mga agos ng parehong direksyon na I2pr at I2arr.

Ang kanilang dalas (sa hertz) ay direktang proporsyonal sa dami ng slip.
f2pr=f1∙Spr;
f2rev=f1∙Srev.
Bukod dito, ang dalas ng f2rev, na nabuo ng sapilitan na kasalukuyang I2rev, ay makabuluhang lumampas sa dalas ng f2rev.
Halimbawa, ang de-koryenteng motor ay tumatakbo sa isang 50 Hz network na may n1=1500 at n2=1440 rpm. Ang rotor nito ay may slip na may kaugnayan sa pasulong na direksyon magnetic flux Spr=0.04 at kasalukuyang frequency f2pr=2 Hz. Reverse slip Srev=1.96, at kasalukuyang frequency f2rev=98 Hz.
Batay sa batas ng Ampère, kapag ang kasalukuyang I2pr ay nakikipag-ugnayan sa magnetic field na Фpr, isang torque Mpr ang lalabas.
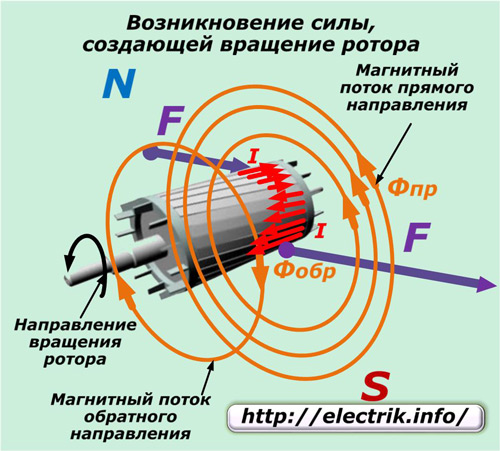
Mpr \u003d cm ∙ Fpr ∙ I2pr ∙cosφ2pr.
Dito, ang halaga ng pare-parehong coefficient cM ay nakasalalay sa disenyo ng makina.
Sa kasong ito, kumikilos din ang reverse magnetic flux Mobr, na kinakalkula ng expression:
Mobr \u003d cm ∙ Fabr ∙ I2 arr ∙ cosφ2 arr.
Bilang resulta ng pakikipag-ugnayan ng dalawang daloy na ito, lalabas ang resulta:
M= Mpr-Mobr.
Pansin! Kapag ang rotor ay umiikot, ang mga alon ng iba't ibang mga frequency ay sapilitan dito, na lumilikha ng mga sandali ng pwersa na may iba't ibang direksyon. Samakatuwid, ang motor armature ay iikot sa ilalim ng pagkilos ng isang pulsating magnetic field sa direksyon kung saan ito nagsimulang pag-ikot.
Sa panahon ng pagtagumpayan ng na-rate na pagkarga ng isang single-phase na motor, ang isang maliit na slip ay nilikha gamit ang pangunahing bahagi ng direktang metalikang kuwintas Mpr. Ang counteraction ng braking, reverse magnetic field na Mobr ay napakakaunting nakakaapekto dahil sa pagkakaiba sa mga frequency ng mga alon ng pasulong at pabalik na direksyon.
f2reverse kasalukuyang makabuluhang lumampas sa f2reverse, at ang nabuo inductive reactance Ang X2obr ay lubos na lumampas sa aktibong sangkap at nagbibigay ng malaking demagnetizing effect ng reverse magnetic flux na Fobre, na kalaunan ay bumababa.
Dahil ang power factor ng motor sa ilalim ng load ay maliit, ang reverse magnetic flux ay hindi maaaring magkaroon ng malakas na epekto sa umiikot na rotor.
Kapag ang isang bahagi ng network ay ipinakain sa isang motor na may nakapirming rotor (n2=0), kung gayon ang parehong forward at reverse slip ay katumbas ng isa, at ang mga magnetic field at pwersa ng forward at reverse na daloy ay balanse at walang pag-ikot na nagaganap. . Samakatuwid, imposibleng i-unwind ang armature ng electric motor mula sa supply ng isang phase.
Paano mabilis na matukoy ang bilis ng engine:
Paano nilikha ang pag-ikot ng rotor sa isang single-phase na asynchronous na motor
Sa buong kasaysayan ng pagpapatakbo ng mga naturang device, ang mga sumusunod na solusyon sa disenyo ay binuo:
1. manu-manong pag-ikot ng baras sa pamamagitan ng kamay o kurdon;
2. ang paggamit ng karagdagang paikot-ikot na konektado sa oras ng paglulunsad dahil sa ohmic, capacitive o inductive resistance;
3. paghahati ng isang short-circuited magnetic coil ng stator magnetic circuit.
Ang unang paraan ay ginamit sa paunang pag-unlad at hindi na ginamit nang higit pa dahil sa mga posibleng panganib ng pinsala sa panahon ng paglulunsad, bagama't hindi ito nangangailangan ng karagdagang mga kadena upang maikonekta.
Ang paggamit ng isang phase-shifting winding sa isang stator
Upang bigyan ang paunang pag-ikot ng rotor sa stator winding, bilang karagdagan, sa oras ng paglulunsad, isa pang pandiwang pantulong ay konektado, ngunit inilipat lamang sa anggulo ng 90 degrees. Ginagawa ito gamit ang isang mas makapal na kawad upang pumasa sa mas malalaking alon kaysa sa mga dumadaloy sa gumagana.
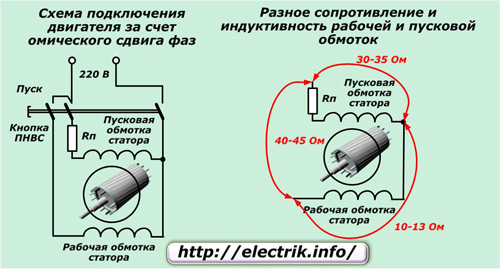
Ang diagram ng koneksyon ng naturang motor ay ipinapakita sa figure sa kanan.

Dito, ang isang pindutan ng uri ng PNVS ay ginagamit upang i-on, na espesyal na idinisenyo para sa mga naturang makina at malawakang ginagamit sa pagpapatakbo ng mga washing machine na ginawa sa USSR. Agad na ino-on ng button na ito ang 3 contact sa paraang, pagkatapos pindutin at bitawan, ang dalawang extreme contact ay mananatiling naka-on, at ang gitnang isa ay magsasara sa loob ng maikling panahon, at pagkatapos ay bumalik sa orihinal nitong posisyon sa ilalim ng pagkilos ng isang bukal.
Maaaring i-off ang mga saradong extreme contact sa pamamagitan ng pagpindot sa katabing "Stop" na button.

Bilang karagdagan sa switch-button switch, upang hindi paganahin ang karagdagang paikot-ikot sa awtomatikong mode, ang mga sumusunod ay ginagamit:
1. centrifugal switch;
2. kaugalian o kasalukuyang mga relay;
Upang mapabuti ang pagsisimula ng makina sa ilalim ng pagkarga, karagdagang elemento sa isang phase-shifting winding.
Sa naturang circuit, ang isang ohmic resistance ay naka-mount sa serye sa stator karagdagang paikot-ikot. Sa kasong ito, ang paikot-ikot ng mga liko ay isinasagawa sa isang bifilar na paraan, na nagsisiguro na ang koepisyent ng self-induction ng coil ay napakalapit sa zero.
Dahil sa pagpapatupad ng dalawang pamamaraan na ito, kapag ang mga alon ay dumaan sa iba't ibang mga windings, isang phase shift ng pagkakasunud-sunod ng 30 degrees ay nangyayari sa pagitan nila, na sapat na. Ang pagkakaiba ng anggulo ay nilikha sa pamamagitan ng pagbabago ng mga kumplikadong resistensya sa bawat circuit.
Sa pamamaraang ito, maaaring mayroon din nagsisimula paikot-ikot na may mababang inductance at mataas na pagtutol. Para sa mga ito, ang paikot-ikot na may isang maliit na bilang ng mga pagliko ng wire ng isang underestimated cross section ay ginagamit.
Ang capacitive phase shift ng mga alon ay nagbibigay-daan sa iyo upang lumikha ng isang panandaliang koneksyon ng isang paikot-ikot na may isang serye na konektado sa kapasitor. Gumagana lang ang circuit na ito habang naka-mode ang makina, at pagkatapos ay i-off.
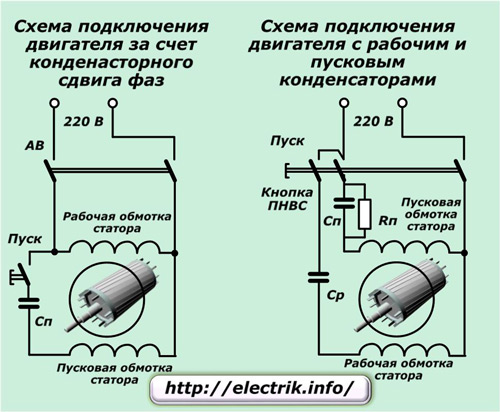
Ang capacitive starting ay gumagawa ng mas maraming torque at mas mataas na power factor kaysa resistive o inductive starting. Maaari itong umabot sa 45÷50% ng nominal na halaga.
Sa magkahiwalay na mga circuit sa kadena gumaganang paikot-ikot, na patuloy na naka-on, nagdaragdag din ng kapasidad. Dahil dito, ang mga alon sa windings ay pinalihis ng isang anggulo ng pagkakasunud-sunod ng π/2. Kasabay nito, ang isang shift sa amplitude maxima ay kapansin-pansin sa stator, na nagbibigay ng isang mahusay na metalikang kuwintas sa baras.
Dahil sa pamamaraang ito, ang makina ay nakakagawa ng higit na lakas sa panahon ng pagsisimula. Gayunpaman, ang pamamaraang ito ay ginagamit lamang sa mga mabibigat na panimulang drive, halimbawa, upang paikutin ang drum. washing machine puno ng lino na may tubig.
Pinapayagan ka ng pagsisimula ng kapasitor na baguhin ang direksyon ng pag-ikot ng armature. Upang gawin ito, baguhin lamang ang polarity ng koneksyon ng panimulang o gumaganang paikot-ikot.
Koneksyon single phase motor may mga split pole
Sa mga asynchronous na motor na may maliit na kapangyarihan na halos 100 W, ang paghahati ng stator magnetic flux ay ginagamit dahil sa pagsasama ng isang short-circuited copper coil sa poste ng magnetic circuit.
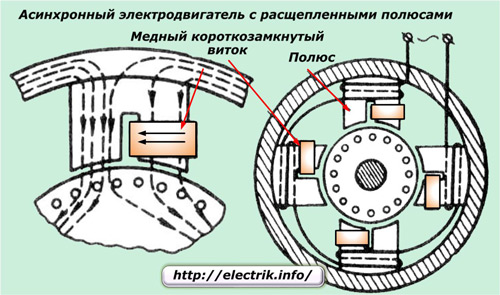
Ang nasabing isang poste na pinutol sa dalawang bahagi ay lumilikha ng isang karagdagang magnetic field, na inilipat mula sa pangunahing isa kasama ang anggulo at pinapahina ito sa lugar na sakop ng coil. Lumilikha ito ng elliptical rotating field na bumubuo ng torque ng pare-parehong direksyon.
Sa ganitong mga disenyo, ang isa ay makakahanap ng mga magnetic shunt na gawa sa mga plate na bakal na nagsasara sa mga gilid ng mga dulo ng mga poste ng stator.
Ang mga makina ng katulad na disenyo ay matatagpuan sa mga fan device para sa pag-ihip ng hangin. Wala silang kakayahang baligtarin.
Pinapayuhan ka naming basahin
, diagnosis, paggamot Paggamot ng urogenital chlamydia") Chlamydia urogenital - paglalarawan, sanhi, sintomas (senyales), diagnosis, paggamot Paggamot ng urogenital chlamydia
Chlamydia urogenital - paglalarawan, sanhi, sintomas (senyales), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano Upang maghintay o hindi maghintay para sa isang tao mula sa hukbo Para sa anong dahilan maaari silang italaga mula sa hukbo
Upang maghintay o hindi maghintay para sa isang tao mula sa hukbo Para sa anong dahilan maaari silang italaga mula sa hukbo Inihurnong mansanas na may cottage cheese Mga inihurnong mansanas na may cottage cheese
Inihurnong mansanas na may cottage cheese Mga inihurnong mansanas na may cottage cheese

