Para sa dami ng metalikang kuwintas induction motor ang phase shift sa pagitan ng kasalukuyang I 2 at e ay may malaking impluwensya. d.s. E 2S rotor.
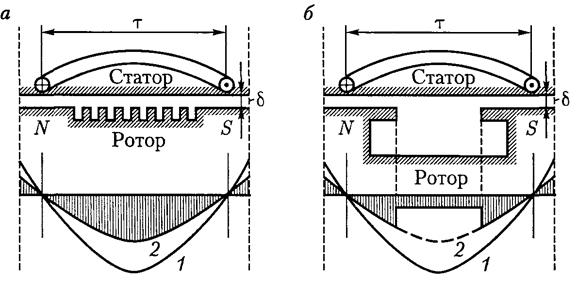
Isaalang-alang ang kaso kapag ang inductance ng rotor winding ay maliit at samakatuwid ang phase shift ay maaaring mapabayaan (Fig. 223, a).
Ang umiikot na magnetic field ng stator ay pinalitan dito ng field ng N at S pole, umiikot, sabihin natin, sa isang clockwise na direksyon. Gamit ang panuntunan ng kanang kamay, tinutukoy natin ang direksyon e. d.s. at mga alon sa rotor winding. Ang rotor currents, na nakikipag-ugnayan sa umiikot na magnetic field, ay lumikha ng isang metalikang kuwintas. Ang mga direksyon ng mga puwersang kumikilos sa kasalukuyang nagdadala ng mga conductor ay tinutukoy ng kaliwang tuntunin. Tulad ng makikita mula sa pagguhit, ang rotor sa ilalim ng pagkilos ng mga puwersa ay iikot sa parehong direksyon tulad ng umiikot na patlang mismo, iyon ay, clockwise.
At ang armature ay isa ring laminate assembly, kadalasang matatagpuan sa isang baras. Coil Brush Magnetic Switch Fig. Ang isang solong paikot-ikot ay naka-install sa pagitan ng kabaligtaran na mga poste ng isang simpleng magnet. Kapag ang coil ay patayong nakahanay, ang karaniwang daloy ng mga electron ay mula sa positibo hanggang sa negatibong terminal. Ang feed ay ginawa ng mga brush na nakikipag-ugnayan sa mga segment. lumipat. Mula sa batas ng electromagnetic induction ni Faraday - ang panuntunan sa kaliwang kamay. ang tuktok ng bobbin ay sasailalim sa isang right-to-left force.
Isaalang-alang ang pangalawang kaso, kapag ang inductance ng rotor winding ay malaki. Sa kasong ito, ang phase shift sa pagitan ng rotor kasalukuyang I 2 at e. d.s. magiging malaki rin ang rotor E 2S. Sa FIG. 223, b, ang magnetic field ng stator ng isang induction motor ay ipinapakita pa rin sa anyo ng clockwise rotating pole N at S. Ang direksyon ng e. d.s. nananatiling pareho sa Fig. 223, a, ngunit dahil sa pagkaantala ng kasalukuyang sa phase, ang axis magnetic field ang rotor ay hindi na magkakasabay sa neutral na linya ng stator field, ngunit lilipat ng ilang anggulo laban sa pag-ikot ng magnetic field. Ito ay hahantong sa katotohanan na kasama ang pagbuo ng isang metalikang kuwintas na nakadirekta sa isang direksyon, ang ilang mga konduktor ay lilikha ng isang kabaligtaran na metalikang kuwintas.
Ang ibabang bahagi ay sasailalim sa puwersa sa kabilang direksyon. Dahil ang coil ay idinisenyo upang paikutin, ang mga puwersang ito ay lilikha ng isang metalikang kuwintas na magiging sanhi ng pag-ikot ng coil sa isang counter-clockwise na direksyon. Ang papel ng switch ay upang matiyak ang daloy ng mga electron. palaging nasa tamang direksyon habang ang bawat gilid ng bobbin ay nagmamarka sa iyong mga poste. Kasama sa switch ang mga segment ng bronze na pinaghihiwalay mula sa mosquito insulating sheets. Ang mga carbon brush ay nakikipag-ugnayan sa isang switch.
Anggulo ng pag-ikot Pagbabago ng Torque sa panahon ng pag-ikot. Kung ang dalawang 90° na pagliko ay ginagamit kasabay ng dalawang magkahiwalay na magnet din sa 90°, kung gayon ang output torque ay halos pare-pareho. Sa pamamagitan ng pagpapakilala ng pangalawang coil, kailangan ng commutator ng apat na magkahiwalay na segment.
Ito ay makikita mula dito na ang kabuuang metalikang kuwintas ng motor sa panahon ng isang phase shift sa pagitan ng kasalukuyang at e. d.s. ang rotor ay mas maliit kaysa sa kaso kapag ang I 2 at E 2S ay nasa phase. Mapapatunayan na ang metalikang kuwintas ng isang induction motor ay tinutukoy lamang ng aktibong bahagi ng rotor current, i.e. kasalukuyang I 2 cos at maaari itong kalkulahin ng formula:
Ang kabuuang pagkawala sa pamamagitan ng switch ay dahil sa mekanikal na friction at stress ng kamay. Gayunpaman, ang parehong pagkalugi ay maliit kung ang motor ay nilagyan ng fan. Synchronous Motors Ang mga synchronous na motor ay pinangalanan dahil gumagana ang mga ito sa isang bilis, iyon ay, ang bilis ng pag-ikot ng magnetic field. Maaaring maisagawa ang paggawa ng umiikot na magnetic field. gamit ang tatlong stator coils na may pagitan sa 120° na pinapagana ng three-phase current. Ang bilis ng pag-ikot ng field ay depende sa dalas ng kasalukuyang.
Ang mekanikal na disenyo ay schematically na ipinapakita sa fig. Katangian ng metalikang kuwintas para sa isang kasabay na motor. Ang umiikot na magnetic field na dulot ng stator at rotor coils, na maihahambing sa isang bar-type na permanenteng magnet na nakahanay sa nag-iisang umiikot na flux na ginawa sa stator. Kapag ang baras ay pinaandar nang mekanikal, ang patlang na nabuo ng rotor ay aalisin mula sa pagkakahanay sa patlang na nabuo ng stator. Mga katangian magkasabay na mga motor karaniwang ipinakita bilang mga pagkakaiba-iba. Makikita mula sa equation sa itaas na ang mga kasabay na motor ay walang panimulang torque at ang rotor ay dapat na paikutin sa kasabay na bilis sa pamamagitan ng ibang paraan.
Ф m - stator magnetic flux (at humigit-kumulang katumbas din ng nagresultang magnetic flux ng induction motor);
Anggulo ng phase sa pagitan ng e. d.s. at paikot-ikot na bahagi ng kasalukuyang
Ang C ay isang pare-parehong koepisyent.
Pagkatapos ng pagpapalit:
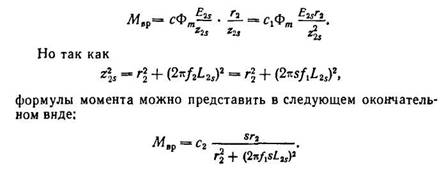
Mula sa huling expression makikita na ang metalikang kuwintas ng induction motor ay nakasalalay sa slip.
Ang mga bentahe ng isang kasabay na motor ay ang kadalian kung saan makokontrol ang power factor. pare-pareho ang bilis ng pag-ikot, anuman ang inilapat na pagkarga. Induction Motors Stator Induction Motor ay kahawig ng Generator alternating current at, kung ang sasakyan ay pinapatakbo ng kasalukuyang, gumagawa ng umiikot na magnetic flux. Ang rotor ay maaaring i-caged o may mga slip ring.
Schematic na representasyon ng isang induction motor. Sa isang frame motor, ang rotor ay nakalamina at ang mga konduktor ay may hubad o hubad na mga bar na tanso. ang aluminyo ay pinapakain sa pamamagitan ng mga puwang ng rotor. Ang mga rod ay hinangin sa bawat dulo gamit ang mga singsing o mga plato upang makagawa ng mga maikling wire bundle. Ang sliding machine ay may laminated core at three-phase winding, katulad ng isang stator, at konektado sa tatlong singsing sa baras. Ang isang eskematiko ng isang induction motor ay ipinapakita na mayroong tatlong stator coils na may pagitan na 120°.
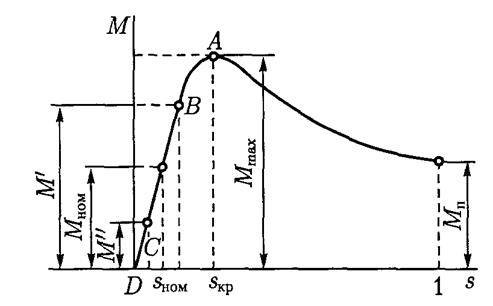
Sa FIG. Ang 224 ay nagpapakita ng curve A ng motor torque versus slip. Ito ay makikita mula sa kurba na sa sandali ng pagsisimula, kapag s=l at n = 0, ang motor torque ay maliit. Ito ay ipinaliwanag sa pamamagitan ng ang katunayan na sa sandali ng pagsisimula, ang dalas ng kasalukuyang sa rotor winding ay ang pinakamataas at ang inductive resistance ng winding ay malaki. Bilang resulta, ang cos ay may maliit na halaga (dahil
Kung ang stator coils ay pinapagana ng isang three-phase current, ang isang umiikot na magnetic field ay nilikha sa stator. Ang figure ay nagpapakita ng isang solong rotor coil. Sa pamamahinga, ang umiikot na field ay mag-uudyok ng boltahe sa rotor bell habang nagbabago ang daloy. Kung ang coil ay bumubuo ng isang closed loop, ang sapilitan na puwersa ng EMF ay mag-udyok ng isang kasalukuyang sa likid. Ang resultang puwersa sa konduktor kung saan ang kasalukuyang pumasa ay magreresulta sa isang sandali, na magiging. pabilisin ang rotor. Ang bilis ng rotor ay tataas hanggang ang electromagnetic torque ay balanse. sa sandali ng mekanikal na pag-load.
|
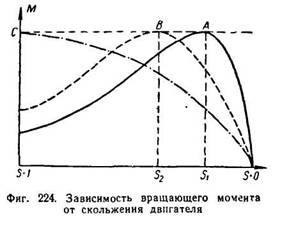
hilera 0.1-0.2). Samakatuwid, kahit na ang panimulang kasalukuyang ay malaki, ang panimulang metalikang kuwintas ay magiging maliit.
Sa ilang slip S 1, ang motor torque ay magkakaroon ng pinakamataas na halaga. Sa karagdagang pagbaba sa slip, o, sa madaling salita, na may karagdagang pagtaas sa bilis ng pag-ikot ng makina, ang metalikang kuwintas nito ay mabilis na bababa.
Ang isang induction motor ay hindi kailanman makakarating sa kasabay na bilis, dahil iyon ay relatibong paggalaw sa pagitan ng rotor at ng umiikot na field ng mga coils, at ito ay mag-udyok ng walang electromagnetic EMF forces sa rotor coils at samakatuwid ay walang electromagnetic torque. Samakatuwid, ang mga induction motor ay palaging tumatakbo sa bilis na bahagyang mas mababa kaysa sa kasabay na bilis.
Ang torque-torque function ay ipinapakita sa figure. Fully charged torque Sliding torque Fig. Katangian ng metalikang kuwintas para sa isang asynchronous na motor. Kapag ang rotor speed ay katumbas ng synchronous, = 0, ang torque ay zero. Kung ang bilis ng rotor ay bumaba sa ibaba ng synchronism, ang metalikang kuwintas ay tumataas nang humigit-kumulang sa isang maximum na halaga na tinutukoy ng kabuuang oras ng pagkarga at nangangailangan ng labis na pagkalugi sa pamamagitan ng rotor. Ang isang induction motor ay maaaring ituring na isang palaging bilis ng makina. Sa katunayan, ang kahirapan ng pagbabago ng bilis ay isa. kawalan ng isang asynchronous na motor.
Upang magsuray-suray at kapag dumudulas s = 0, ang torque ng makina ay magiging katumbas din ng zero.
Dapat pansinin na sa isang asynchronous na motor, ang isang slip na katumbas ng zero ay hindi maaaring umiiral. Ito ay posible lamang kung ang rotor ay panlabas na ibinibigay sa isang metalikang kuwintas sa direksyon ng pag-ikot ng stator field.
Pagsisimula ng metalikang kuwintas maaaring tumaas kung, sa sandali ng pagsisimula, ang phase shift sa pagitan ng kasalukuyang at e. d.s. rotor. Mula sa formula
Mga problema sa mga asynchronous na motor. pagsisimula ng makina, pagpepreno ng makina, kontrol ng bilis. Maaari din itong isipin bilang isang discrete, synchronous na bersyon ng motor. Ang bilang ng mga hakbang na ginawa ay dapat tumugma sa bilang ng mga control pulse na inilapat sa mga phase ng motor. Ang pag-ikot ay aktwal na ginanap sa isang may hangganan na hakbang sa oras.
Kapag ang mga stator phase ay inilapat, ang mga magnetic field ay nabuo na nakikipag-ugnayan sa mga permanenteng magnet flux, na lumilikha ng mga puwersa ng torque na gumagalaw sa rotor. Ang phase feed ay isinasagawa gamit ang polarity pulses. interleaved, na nagpapalubha sa istruktura ng control device, na tinatawag na bipolar command.
makikita na kung, na may patuloy na inductive resistance ng rotor winding, ang aktibong paglaban ay nadagdagan, kung gayon ang anggulo mismo ay bababa, na hahantong sa katotohanan na ang motor torque ay tataas din. Ginagamit ito sa pagsasanay upang madagdagan ang panimulang metalikang kuwintas ng makina. Sa sandali ng pagsisimula, ang isang aktibong pagtutol (nagsisimulang rheostat) ay ipinakilala sa rotor circuit, na pagkatapos ay aalisin sa sandaling tumaas ang bilis ng makina.
Ang ganitong uri ng motor ay nagbibigay ng mas mataas na motor torque at torque upang mapanatili ang rotor kahit na walang phase feed. Ang rotor ay binubuo ng isang axially magnetized cylindrical magnet. Ang angular na hakbang ay mula 0.9 hanggang -5°, ngunit 1.8° ang pinakakaraniwang ginagamit.
Kahulugan at nakabubuo na mga elemento. Sa isang maginoo na induction machine, ang magnetic field ay nilikha ng mga variable mga agos ng kuryente. Ang pag-ikot ng mga alon na ito ay tinatawag pangunahing paikot-ikot, na maaaring single-phase o multi-phase. Ang mga single-phase na makina ay binuo para sa mababang kapangyarihan hanggang sa ilang kilowatts. Ang mga maginoo na makina ay tatlong yugto.
Ang pagtaas ng panimulang torque ay nagiging sanhi ng pinakamataas na metalikang kuwintas ng motor upang makuha ang mas maraming slip (point S 2 ng curve B sa FIG. 224). Sa pamamagitan ng pagtaas ng aktibong paglaban ng rotor circuit sa pagsisimula, posibleng makamit na ang pinakamataas na torque ay sa sandali ng pagsisimula (s = 1 curve C).
Ang metalikang kuwintas ng isang induction motor ay proporsyonal sa parisukat ng boltahe, kaya kahit na ang isang maliit na pagbaba sa boltahe ay sinamahan ng isang matalim na pagbaba sa metalikang kuwintas.
Ang pangalawang aktibong bahagi ng kotse ay ang lugar kung saan ang pangalawang paikot-ikot. Bilang isang patakaran, ang nakapirming bahagi ng makina ay kumikilos bilang isang inductor, at ang rotor ay sapilitan. Ang conventional induction machine ay binuo sa dalawang anyo: induction machine na may ring rotors o winding rotors, kung saan ang multi-phase alternating rotor winding ay konektado sa slip rings, at induction machine na may isa o higit pang rotors.
Ang multi-phase induction machine ay maaaring gumana bilang isang motor, generator o electromagnetic brake. Ito ay ginagamit sa pinakadakilang lawak bilang isang motor at ito ang pinakakaraniwang de-koryenteng motor dahil sa mga natatanging katangian nito, pagiging simple ng istruktura at ligtas na operasyon.
Ang Power P 1 na ibinibigay sa stator winding ng isang induction motor ay katumbas ng:
![]()
kung saan ang m 1 ay ang bilang ng mga phase.
Ang motor stator ay may mga sumusunod na pagkawala ng enerhiya:
1) sa stator winding R es. =m 1 I 1 2 r 1 ;
2) sa stator steel at hysteresis at eddy currents P C .
Ang kapangyarihan na ibinibigay sa rotor ay ang kapangyarihan ng umiikot na magnetic field, na tinatawag ding electromagnetic power P eM .
Ang induction machine ay binuo para sa mga boltahe hanggang sa 10 kV, kapangyarihan mula sa ilang watts hanggang sampu-sampung megawatts at mula sa ilang daan hanggang isang daang libong rebolusyon kada minuto. Ang mga nominal na sukat ay ipinahiwatig sa index plate ng sasakyan. Ang aktibong bakal ay isang induction machine na may nakapirming bahagi, isang stator, na nilagyan ng isang mono o tatlong-phase na kasalukuyang, pati na rin ang gumagalaw na bahagi, ang rotor.
Ipinapakita ng Figure 1 ang isang asynchronous na motor na may disassembled crankshaft. Sa FIG. Ang 2 ay nagpapakita ng isang longitudinal na seksyon ng isang asynchronous coil motor na may coil rotor na may kasamang squirrel-cage at brush lifting device sa mga slip ring. Ang induction machine ay may pare-parehong bakal, na kinukuha nang kaunti hangga't maaari at tinutukoy ng mekanikal na pagsasaalang-alang. Ang bushing ay may mga halaga mula 0.2 hanggang 2 mm, maliliit na halaga na tumutugma sa mga makina na may kapangyarihan ng pagkakasunud-sunod ng mga watt, at malalaking halaga para sa mga makapangyarihang makina na may malubhang kondisyon sa pagpapatakbo.
Ang electromagnetic power ay katumbas ng pagkakaiba sa pagitan ng power na ibinibigay sa motor at ang mga pagkalugi sa motor stator, i.e.
|
Ang pagkakaiba sa pagitan ng Р eM at kumakatawan sa mga de-koryenteng pagkalugi sa rotor winding Р eP, kung napapabayaan natin ang mga pagkalugi sa rotor steel dahil sa kanilang kawalang-halaga (ang dalas ng remagnetization ng rotor ay kadalasang napakaliit):
Mga ordinaryong kotse na may lakas ng isang bagon at malalaki, makapangyarihang mga kotse na may mabigat na kondisyon sa tungkulin. Ang mga tagaytay ay semi-sarado. Sa mga makina na may mataas na boltahe ang mga bukas na puwang lamang ang ginagamit, kung saan ang mga coils ay ginawa nang hiwalay. Ang mga induction machine ay ginagamit halos eksklusibo sa mga coils at sa dalawang layer upang makakuha ng magnetic field na may mas mataas na harmonic content nang kaunti hangga't maaari. Ang mga windings ng stator sa dalawang layer ay kadalasang ginagawa gamit ang isang maikling pitch, at rotary two-layer rotors na may diametrical pitch.
Ang pagbabalot sa maliit hanggang katamtamang laki ng mga kulungan ay kadalasang ginagawa gamit ang maikling pitch at double layer na diametral pitch rotors. Ang transportasyon sa maliliit at katamtamang laki ng mga sasakyan ay isinasagawa sa isang malaking sukat sa aluminyo sa ilalim ng presyon, pati na rin sa tanso, tanso o tanso.
Samakatuwid, ang mga pagkalugi sa rotor winding ay proporsyonal sa slip ng rotor.
Kung mula sa mekanikal na kapangyarihan na binuo ng rotor, ibawas ang mekanikal na pagkalugi R mx dahil sa friction sa rotor bearings, friction sa hangin, atbp., pati na rin ang mga karagdagang pagkalugi R D na nagmumula sa ilalim ng pagkarga at dahil sa rotor stray fields, at mga pagkalugi na dulot ng: magnetic field pulsations sa mga ngipin ng stator at rotor, pagkatapos ay magkakaroon ng kapaki-pakinabang na kapangyarihan sa baras ng motor, na tinutukoy namin ng P 2 .
Ang mga rotor ng crankshaft ay mas simple, mas malakas, at mas mura kaysa sa mga ring ring, kaya kapag ang mga espesyal na bilis ng pagsisimula at mga pagbabago ay hindi kinakailangan, ang mga ito ay malawakang ginagamit sa mababa hanggang katamtamang mga aplikasyon ng kapangyarihan. Upang mabawasan ang ingay, ginagamit ang mga maginoo na puwang na may pinakamaraming posibleng mga slope at nakahilig patungo sa mga generator, at sa kaso ng mga micromachines, ginagamit ang mga espesyal na disenyo, tulad ng mga walang slot na rotor, na binubuo ng ilang radial, axial o tangential layer, hysteresis motors at bowl. -hugis rotary motors.
Ang kahusayan ng isang induction motor ay maaaring matukoy ng formula:

Mula sa huling expression makikita na ang sandali ng pag-ikot ng isang induction motor ay proporsyonal sa produkto ng magnitude ng umiikot na magnetic flux, ang rotor current at ang cosine ng anggulo sa pagitan ng e. d.s. rotor at ang kasalukuyang nito,
Ang hugis ng kotse ay depende sa uri ng paggawa ng kotse. Sa pangkalahatan, ang mga low to medium power na sasakyan ay may mga shield-mounted cam gaya ng nakikita sa mga figure, habang ang malalaking sasakyan ay may hiwalay na stator na nakakabit sa isang karaniwang baseplate. Ang mga maliliit at katamtamang sasakyan ay karaniwang may mga bearings, habang ang mga malalaki ay may mga sliding. Kapag ang smooth running ay ginagamit, ang mga plain bearings ay ginagamit din para sa maliliit na sasakyan.
Ang cast iron at steel ay ginagamit bilang casting material. Ang mga bakal ay ginagamit pareho nang normal at kapag ang mga ito ay nilayon upang bawasan ang bigat ng isang kotse. Ang mga makina hanggang sa 4 kW ay madalas na nilagyan ng mga pabahay ng aluminyo. Ang induction machine ay gumagana sa generator, motor o brake mode na may kaugnayan sa bilis ng rotor ng rotor na may kaugnayan sa kasabay na magnetic field ng reverse magnetic field. Kapag ang electromagnetic energy ay pumasok sa rotor at mekanikal na gumagana sa open air, nangyayari ang motor mode.

Mula sa katumbas na circuit ng isang asynchronous na motor, ang halaga ng pinababang rotor current ay nakuha, na ibinibigay namin nang walang patunay.
![]()
Ang graphically expressed dependence ng electromagnetic moment on slip ay tinatawag mekanikal na katangian induction motor (Larawan 3.3).
kanin. 3.3. Mekanikal na katangian ng asynchronous na motor
Ang isang pinasimple na formula para sa pagkalkula ng electromagnetic torque ng isang induction motor (Kloss formula) ay maaaring gamitin upang bumuo mekanikal na katangian

Sa kasong ito, ang kritikal na slip ay tinutukoy ng formula
![]()
kung saan λ m \u003d M max / M nom - labis na kapasidad ng makina.
Kapag kinakalkula ang mekanikal na katangian, dapat tandaan na sa mga halaga ng slip na lumampas sa kritikal na halaga, ang katumpakan ng mga kalkulasyon ay bumababa nang husto. Ito ay dahil sa isang pagbabago sa mga parameter ng katumbas na circuit ng isang asynchronous na motor, na sanhi ng magnetic saturation ng stator at rotor teeth, at isang pagtaas sa dalas ng kasalukuyang sa rotor winding.
Ang hugis ng mga mekanikal na katangian ng isang induction motor ay higit sa lahat ay nakasalalay sa magnitude ng boltahe na inilapat sa stator winding U 1 (Larawan 3.4) at ang aktibong paglaban ng rotor winding r"2 (Larawan 3.5).

kanin. 3.4. Impluwensiya ng boltahe U 1 sa mga mekanikal na katangian ng induction motor
Ang data na ibinigay sa mga katalogo para sa mga asynchronous na motor ay karaniwang hindi naglalaman ng impormasyon tungkol sa mga parameter ng katumbas na circuit, na nagpapahirap sa paglalapat ng mga formula para sa pagkalkula ng electromagnetic torque. Samakatuwid, upang makalkula ang electromagnetic moment, madalas na ginagamit ang formula

kanin. 3.5. Impluwensya ng paglaban r" 2 sa mga mekanikal na katangian ng induction motor
Ang mga katangian ng pagpapatakbo ng isang asynchronous na motor ay tinutukoy ng mga katangian ng pagganap nito: ang pag-asa sa bilis ng pag-ikot n 2, baras metalikang kuwintas M 2, kahusayan at kapangyarihan kadahilanan cosφ 1 mula sa payload ng engine R 2 .
Kapag kinakalkula ang mga parameter para sa pagtukoy ng pagganap ng mga induction motor, alinman sa isang graphical na pamamaraan batay sa pagtatayo ng isang pie chart o isang analytical na pamamaraan ay ginagamit.
Ang batayan para sa pagsasagawa ng alinman sa mga pamamaraan ng pagkalkula ng pagganap ay ang mga resulta ng mga pagsubok sa bukas na circuit at maikling circuit. Kung ang makina ay dinisenyo, kung gayon ang mga data na ito ay nakuha sa proseso ng pagkalkula nito.
Kapag kinakalkula ang paglaban ng mga resistors r ext, ginagamit sa stator o phase rotor circuit upang limitahan ang panimulang kasalukuyang o kontrol ng bilis, gamitin ang prinsipyo: para sa partikular na asynchronous na motor na ito, madulas s proporsyonal sa aktibong paglaban ng rotor circuit ng engine na ito. Alinsunod dito, ang pagkakapantay-pantay
(r 2 + r ext) /s= r2/s nom,
saan r2- aktibong paglaban ng rotor winding mismo sa operating temperatura; s- madulas kapag ang isang risistor ay ipinasok sa rotor circuit na may paglaban r ext.
Mula sa expression na ito, nakakuha kami ng isang formula para sa pagkalkula ng aktibong paglaban ng karagdagang risistor g hanggang 6, na kinakailangan upang makakuha ng isang naibigay na pagtaas ng slip s sa isang naibigay na (rated) load:
r ext = r 2 (s/s nom - 1).
Mayroong dalawang paraan para sa pagkalkula ng mga panimulang rheostat: graphical at analytical.
Paraan ng graphic mas tumpak, ngunit nangangailangan ng pagbuo ng isang natural na mekanikal na katangian at isang panimulang diagram ng makina, na nauugnay sa isang malaking halaga ng graphic na gawain.
Paraan ng analitikal ang pagkalkula ng mga panimulang rheostat ay mas simple, ngunit hindi gaanong tumpak. Ito ay dahil sa ang katunayan na ang pamamaraan ay batay sa pagpapalagay ng tuwid ng nagtatrabaho na seksyon ng natural na mekanikal na katangian ng isang induction motor. Ngunit kapag ang pag-slide ay malapit sa kritikal, ang pagpapalagay na ito ay nagdudulot ng isang kapansin-pansing error, na kung saan ay mas makabuluhan, mas malapit ang paunang panimulang torque. M 1 hanggang sa pinakamataas na metalikang kuwintas M m ah. Samakatuwid, ang analytical na paraan ng pagkalkula ay naaangkop lamang para sa mga halaga ng paunang panimulang metalikang kuwintas. M 1 < 0.7 M m ah .
Ang paglaban ng mga resistors sa mga yugto ng panimulang rheostat:
pangatlo r ext3 = r 2 (λ m - 1);
pangalawa r ext2 = r magdagdag ng 3 λ m;
una r ext1 = r magdagdag ng 2 λ m,
saan r 2 - aktibong paglaban ng phase winding ng rotor ng induction motor,
saan E 2 at ako 2nom - data ng catalog para sa napiling laki ng motor.
Ang paglaban ng panimulang rheostat sa mga hakbang nito:
unang R PR1 = r ext1 + r ext2 + r ext3 ;
pangalawang R PR2 = r ext2 + r ext3
ikatlong R PR2 = r ext3 .
Upang limitahan ang panimulang kasalukuyang ng mga asynchronous na motor na may rotor ng squirrel-cage ilapat ang mga espesyal na circuit para sa kanilang pagsasama sa mga elemento na naglilimita sa panimulang kasalukuyang. Ang lahat ng mga pamamaraan na ito ay batay sa pagbabawas ng boltahe na inilapat sa stator winding. Ang pinakamalawak na ginagamit na mga circuit na may pagsasama ng mga resistors o chokes sa mga linear wire ng stator (tingnan ang Fig. 3.14, b).Ang pagkalkula ng kinakailangang paglaban ng mga elementong ito para sa isang naibigay na pagbawas sa pagsisimula ng kasalukuyang a, na nauugnay sa natural na halaga nito, ay isinasagawa ayon sa mga formula:
para sa mga resistor na may aktibong pagtutol
R n = 
para sa chokes
X L= 
Motor impedance sa short circuit mode Z k, ohm,
Z k =U 1 /ako P
Dito X sa at r k - inductive at aktibong bahagi ng paglaban na ito
R k = Z k cosφ k ; x k =
Pagbawas ng artipisyal na panimulang torque kapag naka-on R o L magiging
α m = α 2 i
Talahanayan 3.1
Kaya, kung ang halaga α m ay nakatakda, na tumutukoy sa halaga ng artipisyal na panimulang torque M "n, pagkatapos ay kalkulahin ang kaukulang mga halaga R n o x L maaari mong gamitin ang mga formula sa itaas, palitan ang mga ito sa halip na α 2 i, ang halaga ng α m.
Elektrisidad na paglaban motor windings na ibinigay sa mga katalogo ay karaniwang tumutugma sa isang temperatura ng +20 °C. Ngunit kapag kinakalkula ang mga katangian at mga parameter ng mga motor, ang paglaban ng kanilang mga windings ay dapat dalhin sa temperatura ng operating. Alinsunod sa kasalukuyang pamantayan, ang temperatura ng pagpapatakbo ay kinukuha depende sa klase ng paglaban sa init pagkakabukod ng kuryente inilapat sa engine: na may heat resistance class B, ang operating temperature ay 75 ° C, at may heat resistance classes F at H - 115 ° C. Ang muling pagkalkula ng mga winding resistance sa operating temperatura ay isinasagawa sa pamamagitan ng pagpaparami ng winding resistance sa temperatura na 20 ° C, sa pamamagitan ng heating coefficient k t:
r= r 20k t .
Ang mga halaga ng koepisyent na ito ay kinuha depende sa layunin ng mga makina at ang kanilang mga sukat (taas ng axis ng pag-ikot) (Talahanayan 3.1).
SYNCHRONOUS MACHINE
BATAYANG KONSEPTO
Ang isang katangian ng mga kasabay na makina ay isang matibay na koneksyon sa pagitan ng bilis ng rotor n 1 at AC frequency sa stator winding f 1:
n 1 = f 1 60/ R.
Sa madaling salita, ang umiikot na magnetic field ng stator at ang rotor ng kasabay na makina ay umiikot sabaysabay, ibig sabihin, may parehong dalas.
Ayon sa kanilang disenyo, ang mga kasabay na makina ay nahahati sa salient pole at non-salient pole. Sa salient-pole synchronous machine, ang rotor ay may binibigkas na mga pole, kung saan matatagpuan ang field winding coils, pinapakain. direktang kasalukuyang. Ang isang tampok na katangian ng naturang mga makina ay ang pagkakaiba sa magnetic resistance kasama ang longitudinal axis (kasama ang axis ng mga pole) at kasama ang transverse axis (kasama ang axis na dumadaan sa interpolar space). Magnetic resistance sa daloy ng stator kasama ang longitudinal axis DD mas kaunting magnetic resistance sa daloy ng stator nakahalang axis qq. Sa mga non-salient-pole synchronous machine, ang mga magnetic resistance sa kahabaan ng longitudinal at transverse axes ay pareho, dahil ang air gap para sa mga makinang ito sa kahabaan ng stator perimeter ay pareho.
Ang disenyo ng stator ng isang kasabay na makina, sa prinsipyo, ay hindi naiiba sa stator asynchronous na makina. Sa stator winding, sa panahon ng pagpapatakbo ng makina, ang EMF ay na-induce at dumadaloy ang mga alon na lumilikha ng magnetomotive force (MFF), ang pinakamataas na halaga nito ay
F 1 =0,45m 1 ako 1 w 1 k rev1 / R
Ang MDS na ito ay lumilikha ng umiikot na magnetic field, at sa air gap δ ang makina ay lumilikha ng magnetic induction, ang iskedyul ng pamamahagi kung saan sa loob ng bawat poste division t ay nakasalalay sa disenyo ng rotor (Fig. 4.1).
Para sa isang salient-pole synchronous machine, ang equation ng stress ay wasto:
Ú 1 =Ė 0 + Ė 1d + Ė 1q+ Ė σ1 – İ 1 r 1
saan Ė 0 - ang pangunahing EMF ng kasabay na makina, proporsyonal sa pangunahing magnetic flux ng kasabay na makina F 0 ; Ė 1 d - EMF ng armature reaction ng synchronous machine kasama ang longitudinal axis, proporsyonal sa MMF ng armature reaction kasama ang longitudinal axis F 1d; Ė σ1 - armature reaction EMF kasama ang transverse axis, proporsyonal sa armature reaction MMF kasama ang transverse axis F 1q; Ė σ1 - EMF ng leakage, dahil sa pagkakaroon ng magnetic flux ng leakage F 0, ang halaga ng EMF na ito ay proporsyonal sa inductive resistance ng leakage ng stator winding X 1
Ė σ1 = jİ 1r
İ 1 r 1 - aktibong pagbagsak ng boltahe sa stator phase winding, kadalasan ang halagang ito ay napapabayaan kapag nilulutas ang mga problema dahil sa maliit na halaga nito.
kanin. 4.1. Mga graph ng pamamahagi ng magnetic induction kasama ang transverse axis
implicit na poste ( a) at tahasang poste ( b)kasabay na mga makina:
1 - Iskedyul ng MDS; 2 - magnetic induction graph
Para sa isang non-salient-pole synchronous machine, ang stress equation ay may anyo
Ú 1 =Ė 0 + Ė c- İ 1 r 1
Dito
Ė c= Ė 1 + Ė σ1
saan Ė 1 - Armature reaction emf ng isang implicit-pole synchronous machine. Ang itinuturing na mga equation ng stress ay tumutugma sa mga vector stress diagram. Ang mga diagram na ito ay kailangang gawin upang matukoy ang alinman sa pangunahing emf ng makina E 0, o stator winding boltahe U 1. Dapat itong isipin na ang mga equation ng boltahe at ang kaukulang mga diagram ng vector ay hindi isinasaalang-alang ang magnetic saturation ng magnetic circuit ng isang kasabay na makina, na, tulad ng alam mo, ay nakakaapekto sa halaga ng inductive resistances, na nagiging sanhi ng mga ito upang bumaba. Ang accounting para sa saturation na ito ay isang mahirap na gawain, samakatuwid, kapag kinakalkula ang EMF at mga boltahe ng kasabay na mga makina, kadalasang ginagamit nila praktikal na diagram Ang EMF, na isinasaalang-alang ang estado ng saturation ng magnetic system, na sanhi ng pagkilos ng reaksyon ng armature kapag na-load ang kasabay na makina. Kapag gumagawa ng isang praktikal na diagram ng EMF, ang magnetizing force ng armature reaction ay hindi nabubulok sa mga longitudinal at transverse na mga bahagi, samakatuwid ang diagram na ito ay maaaring gamitin kapwa sa mga kalkulasyon ng mga makinang salient-pole at implicit-pole.
Kapag nilulutas ang mga problemang nauugnay sa alinman sa mga kasabay na generator na konektado sa parallel sa network, o sa mga kasabay na motor, ginagamit nila angular na katangian kasabay na mga makina, na kumakatawan sa pagtitiwala ng electromagnetic moment M mula sa anggulo ng pagkarga θ. Sa kasong ito, dapat tandaan na sa salient-pole synchronous machine mayroong dalawang puntos: ang pangunahing M pangunahing at reaktibo M p, at sa mga non-salient-pole machine - tanging ang pangunahing punto:
![]()
Ang anggulo ng pag-load θ nom ay tumutugma sa na-rate na metalikang kuwintas M nom. Tinutukoy ng maximum torque ng synchronous machine ang overload capacity ng synchronous machine, na mahalaga para sa parehong kasabay na mga generator nagpapatakbo nang kahanay sa network, at para sa mga kasabay na motor. Sa mga non-salient pole synchronous machine maximum na sandali tumutugma sa anggulo ng pag-load θ = 90°, sa mga makinang may salient-pole θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного mga electromagnetic na sandali makinang ito.
Upang kalkulahin ang kritikal na anggulo ng pagkarga, na tumutukoy sa labis na kapasidad ng mga salient-pole synchronous na makina, maaari mong gamitin ang expression.
Pinapayuhan ka naming basahin
 Mga sikolohikal na katangian ng mga bata sa pagdadalaga
Mga sikolohikal na katangian ng mga bata sa pagdadalaga Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan
Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan, diagnosis, paggamot Paggamot ng urogenital chlamydia") Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia
Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano

