Ipadala ang iyong mabuting gawa sa base ng kaalaman ay simple. Gamitin ang form sa ibaba
Ang mga mag-aaral, nagtapos na mga estudyante, mga batang siyentipiko na gumagamit ng base ng kaalaman sa kanilang pag-aaral at trabaho ay lubos na magpapasalamat sa iyo.
Naka-host sa http://www.allbest.ru/
Ukrainian akademya ng estado transportasyon ng riles
Sentro para sa Siyentipiko at Praktikal na Pagsasanay
mula sa disiplina na "Electrical Engineering"
"Engine direktang kasalukuyang may parallel excitation
Plano
1. Panimula
2. Disenyo ng DC motor
3. Pagsisimula ng mga makina
4. Teknikal na data ng mga motor
5. Mga katangian ng DC motor
6. Katangiang mekanikal
7. Listahan ng mga ginamit na panitikan
Ang DC motor (DC motor) ay isang converter ng direktang kasalukuyang elektrikal na enerhiya sa mekanikal na enerhiya. Ang disenyo ng makina ay ipinapakita sa Fig.1. Mayroon itong tatlong pangunahing bahagi: ang stator (inductor), armature at kolektor.
Ang inductor (1) - ang nakapirming bahagi ng makina, ay isang hollow cast steel cylinder na gawa sa electrical steel, kung saan sa loob ang mga core (poles) ay pinagkakabitan ng mga bolts. Sa mga core mayroong isang excitation winding (OB) na konektado sa mga brush. Ang inductor ay idinisenyo upang lumikha ng pangunahing magnetic field. Ang anchor (2) (umiikot sa loob na bahagi ng makina) ay isang silindro na binuo mula sa mga sheet ng bakal. Ang isang anchor winding ay inilalagay sa mga grooves ng armature. Ang kolektor (3) ay naayos sa parehong baras na may armature, na isang guwang na silindro na binubuo ng mga indibidwal na tansong plato (lamellas) na nakahiwalay sa isa't isa at mula sa armature shaft at electrically konektado sa mga indibidwal na bahagi ng armature winding. Ang layunin ng kolektor ay ang mekanikal na pagwawasto ng mga variable na sinusoidal EMF sa isang pare-pareho ang boltahe sa magnitude at direksyon, na inalis sa panlabas na circuit gamit ang mga brush na katabi ng kolektor. Ang mga katangian ng DC motor ay pangunahing tinutukoy sa paraan ng pagpapatakbo ng field winding. Kaugnay nito, ang mga DC motor ay inuri sa 2 uri: kasama malayang pagpukaw(Fig. 2a) at self-excitation (Fig. 2 b, c, d)
Ang paikot-ikot na paggulo sa isang DCT na may independiyenteng paggulo ay pinalakas ng isang hiwalay na mapagkukunan ng DC (mula sa isang semiconductor rectifier, baterya o exciter - DC generator).
Sa self-excited DCTs, ang armature at inductor circuits ay electrically connected, i.e. ang paikot-ikot na paggulo ay pinapagana ng EMF ng armature ng makina.
Depende sa de-koryenteng circuit ang mga koneksyon ng armature windings at ang inductor ng isang makina na may self-excitation ay higit pang nahahati sa tatlong uri: parallel, series at mixed excitation (Fig. 2 b, c, d). Ang DPT, tulad ng lahat ng mga de-koryenteng makina, ay nababaligtad, i.e. sila ay walang makabuluhang nakabubuo
ang mga pagbabago ay maaaring gumana pareho sa mode ng generator, at sa mode ng engine. DPT operation mode na may parallel excitation. Isaalang-alang ang pagpapatakbo ng isang DPT na may parallel excitation (Fig. 2b). Kapag ang motor ay konektado sa isang DC network, ang mga alon ay lumabas sa parehong windings. Sa kasong ito, sa paikot-ikot na paggulo, ang kasalukuyang paggulo IB ay lumilikha ng magnetic field ng inductor.
Ang pakikipag-ugnayan ng kasalukuyang armature sa magnetic field ng inductor ay lumilikha ng isang electromagnetic na sandali ng ME.
AKO = sFIYA, (1)
kung saan ang c ay isang pare-parehong koepisyent;
IЯ - armature kasalukuyang;
Ф - magnetic flux.
Ang electromagnetic moment ng ME ay naiiba mula sa sandali ng MW sa motor shaft sa pamamagitan ng halaga ng sandali ng idling loss MHH, na, dahil sa liit nito, ay maaaring mapabayaan at ipagpalagay na
Ang isang back-EMF E ay na-induce sa mga conductor ng umiikot na armature:
kung saan ang n ay ang bilis ng pag-ikot ng armature;
k ay isang pare-parehong kadahilanan.
Ang electrical equilibrium equation ng engine ay may anyo:
U \u003d E + IЯ RY \u003d knФ + IЯ RY, (3)
kung saan ang U ay ang mains supply boltahe.
Pagsisimula ng makina
Kapag sinimulan ang makina, ang armature ay nakatigil sa unang sandali (n = 0) at binibigyan ng (2) ang EMF ng armature E = knF = 0. Sa kasong ito, ayon sa (3), ang panimulang kasalukuyang ng armature IYaP ay hindi katanggap-tanggap na malaki, dahil Ang R ay maliit at tinukoy bilang:
Samakatuwid, upang limitahan ang panimulang kasalukuyang, ang paglaban ng panimulang rheostat RP ay ipinakilala sa serye sa armature circuit, na ganap na ipinakilala bago simulan ang makina at ito ay output pagkatapos bumilis ang makina habang tumataas ang likod na EMF (E).
Ang ganitong pagsisimula ng makina ay nagpoprotekta sa armature winding nito mula sa mataas na panimulang alon ng INP at nagbibigay-daan sa iyo upang makuha ang maximum na magnetic flux sa mode na ito.
Kung ang makina ay nagsimula sa idle, pagkatapos ay hindi na kailangang bumuo ng maximum na metalikang kuwintas MB sa baras. Samakatuwid, ang makina ay maaaring simulan sa pamamagitan ng maayos na pagtaas ng supply boltahe U.
Binabaliktadmakina.
Ang pagbabago ng direksyon ng pag-ikot ng motor ay maaaring makamit sa pamamagitan ng pagbabago ng kasalukuyang alinman sa armature winding o sa field winding, dahil. binabago nito ang tanda ng metalikang kuwintas. Ang sabay-sabay na pagbabago sa direksyon ng kasalukuyang sa parehong windings ay hindi nagbabago sa direksyon ng pag-ikot ng motor. Ang paglipat ng mga dulo ng windings ay dapat isagawa lamang pagkatapos na ganap na tumigil ang makina.
Regulasyonbilispag-ikot.
Mula sa expression (3) posibleng matukoy ang bilis ng pag-ikot ng makina:
motor direktang kasalukuyang supply paikot-ikot
Makikita mula sa formula (6) na ang bilis ng pag-ikot ng isang DC motor ay maaaring kontrolin sa pamamagitan ng pagpapalit ng mains voltage, ang excitation magnetic flux at ang resistensya ng armature circuit. Ang pinakakaraniwang paraan upang makontrol ang bilis ng pag-ikot ng motor ay ang pagbabago ng magnetic flux sa pamamagitan ng isang adjusting rheostat sa excitation circuit.
Ang pagbabawas ng kasalukuyang paggulo ay nagpapahina sa magnetic flux at pinatataas ang bilis ng pag-ikot ng motor. Ang pamamaraang ito ay matipid, dahil ang kasalukuyang paggulo (sa parallel excitation motors) ay 3-5% ng armature IN, at ang pagkawala ng init sa control rheostat ay napakaliit. Pangunahing Tampok ng DC Motor na may Parallel Excitation
Ang pagpapatakbo ng isang DC motor na may parallel excitation ay sinusuri ng mga sumusunod na pangunahing katangian:
Katangian ng idling: (fig.3)
n0 = ѓ (IB), na may U = UN = const at IЯ = I0,
kung saan ang n0 ay ang idle speed (walang load),
I0 - walang-load na kasalukuyang ng 5 - 10% IH;
UN - nominal na halaga boltahe ng mains.
Isinasaalang-alang na sa idle ang produkto IЯRЯ ay maliit kumpara sa U, pagkatapos mula sa (6) ang bilis ng engine ay tinutukoy ng kabaligtaran na relasyon sa magnetic flux Ф:
Sa pagtaas ng kasalukuyang sa paikot-ikot na paggulo, nagbabago ang magnetic flux sa kahabaan ng magnetization curve Ф = ѓ (IВ), kaya ang ugnayan sa pagitan ng bilis ng pag-ikot ng motor n at ang kasalukuyang paggulo IВ ay halos hyperbolic. Sa mababang halaga ng kasalukuyang paggulo, ang mga rebolusyon ay nagbabago halos kabaligtaran. Sa mataas na daloy ng paggulo,
ang magnetic saturation ng mga steel pole ay may epekto, at ang curve ay nagiging flatter at tumatakbo halos parallel sa abscissa axis. Ang isang matalim na pagbabago - isang pagbawas sa kasalukuyang paggulo, pati na rin ang isang hindi sinasadyang pagkagambala ng circuit ng paggulo ayon sa (9) ay maaaring maging sanhi ng motor na "tumatakbo" (kapag IВ > 0, at samakatuwid Ф ay may gawi din sa 0, n > ?).
Katangiang mekanikal. Ito ang pag-asa ng bilis ng pag-ikot ng rotor sa MV torque sa motor shaft sa isang pare-parehong boltahe ng supply ng mains at kasalukuyang paggulo:
n \u003d ѓ (MV), na may U \u003d UH \u003d const, IВ \u003d const.
Para sa isang parallel excitation motor, ang sandaling MV ay proporsyonal sa unang antas ng armature current IЯ. Samakatuwid, ang mekanikal na katangian ay maaaring kinakatawan ng dependence n (Ib), na tinatawag na electromechanical o bilis (Fig. 4).
Ang isang load (braking torque) ay inilalapat sa motor shaft. Ayon sa (6), sa patuloy na mga halaga ng kasalukuyang paggulo, ang pagbaba sa bilis ng pag-ikot n ay isang resulta ng pagbaba ng boltahe sa armature circuit - IЯ·RЯ at ang armature reaction. Sa pagtaas ng pagkarga, ang bilis ng pag-ikot ay bumababa ng isang hindi gaanong halaga, sa pagkakasunud-sunod ng 3-8%. Ang katangian ng bilis na ito ay tinatawag na matibay. Regulating katangian (Larawan 5). Ito ang dependence ng excitation current IB sa armature current IA sa pare-pareho ang boltahe network U at patuloy na bilis ng pag-ikot n:
IВ \u003d ѓ (IЯ) sa U \u003d UN, n \u003d const.
Mula sa pagsusuri ng panlabas na katangian, makikita na ang bilis ng pag-ikot ay bumababa sa pagtaas ng pagkarga.
Ang katangian ng kontrol ay ginagawang posible upang hatulan kung paano, sa loob ng kung anong mga limitasyon ay kinakailangan upang ayusin ang kasalukuyang sa paikot-ikot na paggulo upang mapanatili ang isang pare-pareho ang bilis ng pag-ikot.
Eksperimental na pamamaraan
Ang pag-aaral ng mga operating mode ng DPT na may parallel excitation ay isinasagawa sa
modular educational complex MUK-EP1, na binubuo ng:
DC motor power supply BPP1;
Power supply unit para sa asynchronous na motor BPA1
Unit ng de-kuryenteng makina MA1-AP.
PL073U3 (220V, 180 W,
1500 rpm). Awtomatikong paglipat ng mga windings ng motor at koneksyon ng pagsukat
Ang mga aparato ay isinasagawa sa block BPP1.
Ginamit bilang load asynchronous na motor(BP) sa mode dynamic na pagpepreno. Awtomatikong pagpapalit ng BP windings at koneksyon mga instrumento sa pagsukat ito ay isinasagawa sa block BPA1.
Ang scheme ng pagpapatakbo ng complex pagkatapos ng paglipat ng mga bloke ay ipinapakita sa Fig.6.
Bibliograpiya
1. Katsman M.M. Kotseng dekuryente. - M.: Mas mataas. paaralan, 1993.
2. Kopylov I.P. Kotseng dekuryente. - M.: Energoatomizdat, 1986
Naka-host sa Allbest.ru
...Mga Katulad na Dokumento
Ang prinsipyo ng pagpapatakbo at ang aparato ng mga generator ng DC. Electromotive force at electromagnetic torque ng DC generator. Mga paraan ng paggulo ng mga generator ng DC. Mga tampok at katangian ng mga makina iba't ibang uri pagpukaw.
abstract, idinagdag noong 11/12/2009
Bilis ng kontrol ng DC motors sa pamamagitan ng pagbabago ng excitation flux. Pinakamataas na kasalukuyang proteksyon ng electric drive. Mga katangian ng bilis ng makina. Mga scheme ng mga power circuit ng DC motor at asynchronous na motor.
term paper, idinagdag noong 03/30/2014
Ang prinsipyo ng pagpapatakbo ng DC generator. Anchor windings at ang proseso ng paggulo ng mga DC machine. Paikot-ikot na may seksyong "patay". Isang halimbawa ng isang simpleng loop at wave winding. DC motor na may sunud-sunod na paggulo.
pagtatanghal, idinagdag noong 11/09/2013
Disenyo at prinsipyo ng pagpapatakbo mga de-koryenteng makina direktang kasalukuyang. Pag-aaral ng pag-load, panlabas at kontrol na mga katangian at mga katangian ng pagpapatakbo ng isang generator na may independiyenteng paggulo. Mga tampok ng pagsisimula ng isang makina na may parallel excitation system.
gawaing laboratoryo, idinagdag noong 02/09/2014
Pag-aaral ng mga mekanikal na katangian ng DC motors na may parallel, independent at series excitation. mga mode ng pagpepreno. de-kuryenteng motor alternating current na may phase rotor. Pag-aaral ng mga circuit ng pagsisimula ng motor, mga function ng oras.
gawaing laboratoryo, idinagdag noong 10/23/2009
Ang prinsipyo ng pagpapatakbo at ang aparato ng DC generator. Mga uri ng armature windings. Mga paraan ng paggulo ng mga generator ng DC. Reversibility ng DC machine. Motor ng parallel, independent, series at mixed excitation.
abstract, idinagdag 12/17/2009
Disenyo ng DC motor. Ang core ng mga pangunahing plus, ang uri at pitch ng armature winding. Ang bilang ng mga paikot-ikot na pagliko, mga plate ng kolektor, mga puwang. Katangian ng magnetization ng motor. Ang masa ng armature winding wire at ang pangunahing mga dynamic na tagapagpahiwatig.
term paper, idinagdag noong 05/21/2012
Power supply ng motor sa panahon ng kontrol ng bilis sa pamamagitan ng pagbabago ng halaga ng boltahe mula sa isang hiwalay na regulated DC source. Application ng mga thyristor converter sa direktang kasalukuyang mga electric drive. Iskema ng istruktura thyristor converter.
term paper, idinagdag noong 02/01/2015
Pagmomodelo sa simula ng DC motor DP-62 para sa drive ng ingot cart gamit ang SciLab package. Block diagram ng modelo, ang mga elemento nito. Data ng pasaporte ng DP-62 engine, uri ng paggulo. Lumilipas na diagram, paglalagay.
gawaing laboratoryo, idinagdag noong 06/18/2015
Mga tampok ng pagkalkula ng DC motor mula sa posisyon ng control object. Pagkalkula ng thyristor converter, electric drive sensor at kasalukuyang sensor. Scheme ng isang DC motor na may independiyenteng paggulo. Pagmomodelo ng panlabas na tabas.
Kabanata 29
Pangunahing konsepto
M, umiikot.
antielectromotive
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
Ngunit, ayon sa (25.24),
![]()
![]() , (29.4)
, (29.4)
![]() .
.
M, .
i.e. U o pagbaba ng daloy F ;
ikaw, F
F
Pagsisimula ng makina
U .
pagsisimula ng mga rheostat
R O 1
![]() .
.
Sa parehong oras sa pamamagitan ng pingga R at gulong W R,
,
M direktang proporsyonal sa daloy F F
Kabanata 29
Pangunahing konsepto
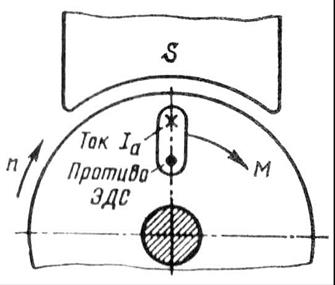
Ang mga collector machine ay may pag-aari ng reversibility, ibig sabihin, maaari silang gumana pareho sa generator mode at sa engine mode. Samakatuwid, kung ang isang DC machine ay konektado sa isang DC power source, pagkatapos ay lilitaw ang mga alon sa paggulo ng paggulo at sa armature winding ng makina. Ang pakikipag-ugnayan ng armature current sa excitation field ay lumilikha ng electromagnetic moment sa armature M, na hindi pagpepreno, tulad ng nangyari sa generator, ngunit umiikot.
Sa ilalim ng impluwensiya electromagnetic na sandali armature, ang makina ay magsisimulang umikot, ibig sabihin, ang makina ay gagana sa engine mode, kumokonsumo ng elektrikal na enerhiya mula sa network at iko-convert ito sa mekanikal na enerhiya. Sa panahon ng pagpapatakbo ng makina, ang armature nito ay umiikot sa isang magnetic field. Ang isang EMF ay sapilitan sa armature winding, ang direksyon kung saan maaaring matukoy ng "kanang kamay" na panuntunan. Sa pamamagitan ng likas na katangian nito, hindi ito naiiba sa EMF na sapilitan sa generator armature winding. Sa motor, ang EMF ay nakadirekta laban sa kasalukuyang, at samakatuwid ito ay tinatawag antielectromotive puwersa (back-EMF) ng armature (Larawan 29.1).
Para sa isang makina na tumatakbo sa patuloy na bilis,
![]() .
(29.1)
.
(29.1)
Mula sa (29.1) sumusunod na ang boltahe na ibinibigay sa motor ay balanse ng likod na EMF ng armature winding at ang pagbaba ng boltahe sa armature circuit. Batay sa (29.1) armature current
Ang pagpaparami ng magkabilang panig ng equation (29.1) sa armature current , nakukuha natin power equation para sa armature circuit:
![]() , (29.3)
, (29.3)
nasaan ang kapangyarihan sa armature winding circuit; - kapangyarihan ng mga pagkalugi ng kuryente sa armature circuit.
Upang linawin ang kakanyahan ng expression, gagawin namin ang sumusunod na pagbabagong-anyo:
![]() ,
,
![]() .
.
Ngunit, ayon sa (25.24),
![]()
![]() , (29.4)
, (29.4)
kung saan ang angular frequency ng pag-ikot ng armature; - electromagnetic power ng engine.
Samakatuwid, ang expression ay electromagnetic power ng motor.
Pagbabago ng expression (29.3) na isinasaalang-alang (29.4), nakuha namin
![]() .
.
Ang isang pagsusuri ng equation na ito ay nagpapakita na sa isang pagtaas sa pagkarga sa motor shaft, ibig sabihin, sa isang pagtaas sa electromagnetic torque M, pinatataas ang kapangyarihan sa armature winding circuit, ibig sabihin, ang kapangyarihan sa input ng motor. Ngunit dahil ang boltahe na ibinibigay sa motor ay pinananatiling hindi nagbabago, ang pagtaas sa pagkarga ng motor ay sinamahan ng pagtaas ng kasalukuyang sa armature winding .
Depende sa paraan ng paggulo, ang mga motor ng DC, pati na rin ang mga generator, ay nahahati sa mga motor na may paggulo mula sa mga permanenteng magnet (magnetoelectric) at may electromagnetic na paggulo. Ang huli, alinsunod sa scheme para sa paglipat sa excitation winding na may kaugnayan sa armature winding, ay nahahati sa parallel (shunt), series (serial) at mixed (compound) excitation motors.
Ayon sa formula ng EMF, bilis ng motor (rpm)
Ang pagpapalit ng halaga mula sa (29.1), nakukuha namin (rpm)
i.e. ang bilis ng motor ay direktang proporsyonal sa boltahe at inversely proporsyonal sa flux ng paggulo. Pisikal, ito ay ipinaliwanag sa pamamagitan ng ang katunayan na ang pagtaas sa boltahe U o pagbaba ng daloy F nagdudulot ng pagtaas sa pagkakaiba ; ito naman, ay humahantong sa pagtaas ng kasalukuyang [tingnan ang Fig. (29.2)]. Bilang isang resulta, ang tumaas na kasalukuyang nagpapataas ng metalikang kuwintas, at kung ang metalikang kuwintas ng pagkarga ay nananatiling hindi nagbabago, ang bilis ng motor ay tumataas.
Mula sa (29.5) sumusunod na ang bilis ng engine ay maaaring kontrolin sa pamamagitan ng pagbabago ng alinman sa boltahe ikaw, ibinibigay sa motor, o ang pangunahing magnetic flux F, o electrical resistance sa armature circuit.
Ang direksyon ng pag-ikot ng armature ay nakasalalay sa mga direksyon ng magnetic flux ng paggulo F at kasalukuyang sa armature winding. Samakatuwid, sa pamamagitan ng pagbabago ng direksyon ng alinman sa mga dami na ito, maaari mong baguhin ang direksyon ng pag-ikot ng armature. Dapat tandaan na ang paglipat ng mga karaniwang terminal ng circuit sa switch ng kutsilyo ay hindi nagbabago sa direksyon ng pag-ikot ng armature, dahil sabay na binabago nito ang direksyon ng kasalukuyang sa parehong armature winding at ang excitation winding.
Pagsisimula ng makina
Ang motor armature current ay tinutukoy ng formula (29.2). Kung tatanggapin U at hindi nagbabago, kung gayon ang kasalukuyang ay nakasalalay sa likod-EMF . Ang kasalukuyang ay umabot sa pinakamataas na halaga nito kapag nagsimula ang makina. Sa paunang sandali ng pagsisimula, ang armature ng motor ay nakatigil at walang EMF na na-induce sa paikot-ikot nito. Samakatuwid, kapag ang motor ay direktang konektado sa network, ang isang inrush na kasalukuyang nangyayari sa paikot-ikot ng armature nito
Karaniwan, ang paglaban ay maliit, kaya ang halaga ng panimulang kasalukuyang umabot sa hindi katanggap-tanggap na malalaking halaga, 10-20 beses na mas mataas kaysa kasalukuyang na-rate makina.
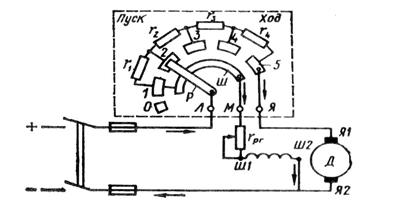
Ang ganitong malaking panimulang kasalukuyang ay lubhang mapanganib para sa motor. Una, maaari itong magdulot ng all-round fire sa makina, at pangalawa, na may tulad na agos, ang isang labis na malaking panimulang torque ay bubuo sa motor, na may epekto sa pagkabigla sa mga umiikot na bahagi ng motor at maaaring mekanikal na sirain ang mga ito. At sa wakas, ang kasalukuyang ito ay nagiging sanhi ng isang matalim na pagbaba sa boltahe sa network, na negatibong nakakaapekto sa pagpapatakbo ng iba pang mga mamimili na kasama sa network na ito. Samakatuwid, ang pagsisimula ng engine sa pamamagitan ng direktang koneksyon sa network (non-rheostatic start) ay karaniwang ginagamit para sa mga engine na may kapangyarihan na hindi hihigit sa 0.7-1.0 kW. Sa mga motor na ito, dahil sa tumaas na paglaban ng armature winding at maliit na umiikot na masa, ang panimulang kasalukuyang halaga ay 3-5 beses lamang na mas mataas kaysa sa rate na kasalukuyang, na hindi nagdudulot ng panganib sa motor. Tulad ng para sa mga motor na may higit na kapangyarihan, kapag sinimulan ang mga ito, ginagamit nila upang limitahan ang panimulang kasalukuyang. pagsisimula ng mga rheostat(PR), kasama sa serye sa armature circuit (rheostatic start).
Bago simulan ang makina, kailangan mo ng pingga R ilagay ang rheostat sa idle contact O(Larawan 29.2). Pagkatapos ay i-on ang switch ng kutsilyo, ilipat ang pingga sa unang intermediate contact 1
at ang motor armature circuit ay konektado sa network sa pamamagitan ng pinakamataas na resistensya ng rheostat ![]() .
.
kanin. 29.2. Scheme ng pag-switch sa panimulang rheostat
Sa parehong oras sa pamamagitan ng pingga R at gulong W ang isang paikot-ikot na paggulo ay konektado sa network, ang kasalukuyang kung saan sa buong panahon ng pagsisimula ay hindi nakasalalay sa posisyon ng pingga R, dahil ang paglaban ng bus ay bale-wala kumpara sa paglaban ng paikot-ikot na paggulo.
Starting armature current sa impedance ng panimulang rheostat
Sa pagdating ng kasalukuyang sa armature circuit, ang isang panimulang metalikang kuwintas ay nangyayari, sa ilalim ng impluwensya kung saan nagsisimula ang pag-ikot ng armature. Habang tumataas ang bilis, tumataas ang back-emf , na humahantong sa pagbaba sa panimulang kasalukuyang at panimulang metalikang kuwintas.
Habang bumibilis ang armature ng engine, inililipat ang panimulang rheostat lever sa mga posisyon 2, 3, atbp. Sa posisyon 5 ng rheostat lever, matatapos ang engine start. Ang paglaban ng panimulang rheostat ay karaniwang pinipili upang ang pinakamalaking panimulang kasalukuyang ay lumampas sa na-rate na kasalukuyang nang hindi hihigit sa 2-3 beses.
Dahil ang motor torque M direktang proporsyonal sa daloy F[cm. (25.24)], pagkatapos ay upang mapadali ang pagsisimula ng engine ng parallel at mixed excitation, ang resistensya ng rheostat sa excitation circuit ay dapat na ganap na alisin. daloy ng paggulo F sa kasong ito ay nakakakuha pinakamataas na halaga at ang motor ay bubuo ng kinakailangang metalikang kuwintas sa mas mababang armature current.
Hindi ipinapayong gumamit ng mga panimulang rheostat upang simulan ang mga motor na mas malakas, dahil magdudulot ito ng malaking pagkawala ng enerhiya. Gayundin, magiging malaki ang pagsisimula ng mga rheostat. Samakatuwid, sa mga high-power engine, ang isang rheostatless na pagsisimula ng engine ay ginagamit sa pamamagitan ng pagpapababa ng boltahe. Ang mga halimbawa nito ay ang pagsisimula ng mga traksyon na motor ng isang de-koryenteng lokomotibo sa pamamagitan ng paglipat ng mga ito mula sa serial connection kapag nagsisimula sa parallel sa normal na operasyon(tingnan ang § 29.6) o simulan ang makina sa isang generator-motor circuit (tingnan ang § 29.4).
Parallel excitation motor
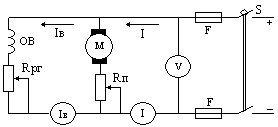
Ang scheme para sa pagkonekta ng isang parallel excitation motor sa network ay ipinapakita sa fig. 29.3, a. Ang isang katangian ng motor na ito ay ang kasalukuyang sa field winding (OB) ay hindi nakasalalay sa kasalukuyang load (armature current). Ang rheostat sa excitation circuit ay nagsisilbing regulate ng kasalukuyang sa excitation winding at ang magnetic flux ng mga pangunahing pole.
Ang mga katangian ng pagganap ng isang makina ay natutukoy sa pamamagitan nito mga katangian ng pagpapatakbo, na nauunawaan bilang ang pag-asa ng bilis ng pag-ikot n, kasalukuyan ako, kapaki-pakinabang na sandali M2, metalikang kuwintas M mula sa kapangyarihan sa baras ng motor R 2 sa at (Larawan 29.3, 6 ).
Upang pag-aralan ang pag-asa at , na karaniwang tinatawag na katangian ng bilis, bumaling tayo sa formula (29.5), kung saan makikita na may pare-parehong boltahe. U dalawang salik ang nakakaapekto sa bilis: ang pagbaba ng boltahe sa armature circuit at ang excitation flux F. Sa pagtaas ng load, bumababa ang numerator, habang dahil sa armature reaction, bumababa rin ang denominator F. Karaniwan, ang pagbawas sa daloy na dulot ng reaksyon ng armature ay maliit at ang unang kadahilanan ay nakakaapekto sa bilis ng higit sa pangalawa. Bilang isang resulta, ang bilis ng engine na may pagtaas ng pagkarga R 2 bumababa, at ang graph ay nahuhulog na may bahagyang umbok na nakaharap sa x-axis. Kung ang reaksyon ng armature sa engine ay sinamahan ng isang mas makabuluhang pagpapahina ng daloy F, pagkatapos ay tataas ang bilis ng pag-ikot sa pagtaas ng pagkarga, tulad ng ipinapakita ng dashed curve sa Fig. 29.3, b. Gayunpaman, ang gayong pag-asa ay hindi kanais-nais, dahil, bilang panuntunan, hindi nito natutugunan ang kondisyon para sa matatag na operasyon ng makina: na may pagtaas sa pagkarga sa makina, ang bilis ng pag-ikot ay tumataas, na humahantong sa isang karagdagang pagtaas sa load, atbp., ibig sabihin, ang bilis ng pag-ikot n ang makina ay tumataas nang walang katiyakan at ang makina ay nagiging "overheated". Upang mabigyan ang katangian ng bilis ng isang bumabagsak na hugis ng kurba, ang ilang mga shunt motor ay gumagamit ng isang light (na may maliit na bilang ng mga pagliko) series excitation winding, na tinatawag na nagpapatatag ng paikot-ikot. Kapag ang winding na ito ay naka-on sa koordinasyon sa parallel excitation winding, ang MMF nito ay nagbabayad para sa demagnetizing effect ng armature reaction upang ang flux F nananatiling halos hindi nagbabago sa buong hanay ng pagkarga .., dahil
Kung pabayaan natin ang anchor reaction, kung gayon (dahil) maaari nating tanggapin . Pagkatapos ang mekanikal na katangian ng parallel excitation motor ay isang tuwid na linya, medyo nakakiling sa abscissa axis (Larawan 29.4, a). Ang anggulo ng pagkahilig ng mekanikal na katangian ay mas malaki, mas malaki ang halaga ng paglaban na kasama sa armature circuit. Ang mekanikal na katangian ng engine sa kawalan ng karagdagang pagtutol sa armature circuit ay tinatawag natural(tuwid 1 ). Ang mga mekanikal na katangian ng makina, na nakuha sa pamamagitan ng pagpapakilala ng karagdagang pagtutol sa armature circuit, ay tinatawag artipisyal(direkta 2 at 3 ).
Ang uri ng mekanikal na katangian ay nakasalalay din sa halaga ng pangunahing magnetic flux F. Kaya, kapag bumababa F tumataas ang bilis ng pag-ikot x.x. at sabay na tumataas, ibig sabihin, ang parehong termino ng equation (29.11) ay tumaas. Ito ay humahantong sa isang matalim na pagtaas sa slope ng mekanikal na katangian, ibig sabihin, sa isang pagbawas sa higpit nito (Larawan 29.4, b).
Kapag nagbago ang boltahe ng armature U nagbabago ang bilis ng pag-ikot, ngunit nananatiling hindi nagbabago. Bilang resulta, ang katigasan ng mekanikal na katangian (kung pinababayaan natin ang impluwensya ng reaksyon ng armature) ay hindi nagbabago (Larawan 29.4, sa), ibig sabihin, ang mga katangian ay nagbabago sa taas habang nananatiling parallel sa isa't isa.
§ 138. ELECTRIC MOTOR NA MAY PARALLEL EXCITATION
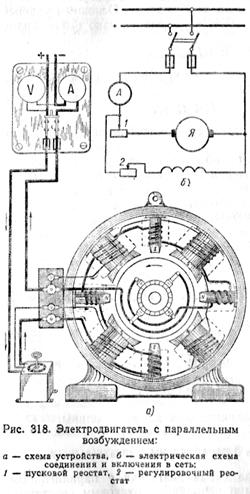
Sa fig. Ang 318 ay nagpapakita ng isang diagram ng isang motor na may parallel excitation at isang panimulang rheostat na kasama sa armature circuit. Dahil ang paikot-ikot na paggulo ay konektado kahanay sa network, kung kailan patuloy na pagtutol ang circuit ng paggulo at ang boltahe ng mains, ang magnetic flux F ng motor ay dapat na pare-pareho.
Mula sa formula
makikita na ang halaga ng kontra-e. d.s. Bumababa ang motor sa pagtaas ng armature current, na nagiging sanhi ng pagbaba din ng bilis ng motor.
Gayunpaman, tulad ng nabanggit kanina, ang magnitude ng pagbagsak ng boltahe sa armature winding I a r a ay napakaliit kumpara sa boltahe U. Samakatuwid, sa pagtaas ng kasalukuyang load, ang bilis ng engine ay bahagyang bumababa.
Samakatuwid, ang isang katangiang katangian ng isang motor na may parallel excitation ay halos pare-pareho ang bilis ng pag-ikot kapag nagbabago ang load sa baras nito. Karaniwan, ang bilis ng mga makina ng ganitong uri ay bumababa lamang ng 3-5% kapag naabot ang buong pagkarga.
Ang metalikang kuwintas ng motor ay proporsyonal sa produkto ng kasalukuyang armature at ang magnetic flux:
Mula dito makikita na ang metalikang kuwintas ng motor na may parallel na paggulo ay proporsyonal sa kasalukuyang armature:
Samakatuwid, sa pamamagitan ng ammeter na kasama sa armature circuit, maaaring hatulan ng isa ang pagkarga ng engine.
Ang makina ay magkakaroon ng pinakamataas na bilis ng pag-ikot sa idle, kung ang paglaban ng pagsasaayos ng rheostat ay ganap na naalis. Ang pagbubukas ng excitation circuit ay magiging sanhi ng pagbaba ng magnetic flux ng motor sa isang hindi gaanong halaga ng natitirang magnetism flux. Since kontra-e. d.s. ay dapat na halos katumbas ng boltahe ng mains, pagkatapos ay may pagbaba sa magnetic flux, ang bilis ng pag-ikot ng motor ay tataas nang husto at magiging mapanganib para sa mekanikal na lakas ng motor. Samakatuwid, kapag nagpapatakbo ng makina, kinakailangan na subaybayan ang mabuting kalagayan ng circuit ng paggulo.
Ang kontrol sa bilis ng isang shunt motor ay kadalasang ginagawa sa pamamagitan ng pag-iiba-iba ng flux na may variable na rheostat sa field circuit. Ang paraan ng pagkontrol ng bilis na ito ay ang pinaka-ekonomiko. Ang ilang mga motor ay may kontrol sa bilis mula 1.5:1 hanggang 4:1. Ipinapakita ng mga numero ang ratio ng maximum na bilis sa pinakamaliit. Ang mga limitasyon ng regulasyon ay limitado pangunahin sa pamamagitan ng pagkasira ng mga kondisyon ng paglipat at ang mekanikal na lakas ng armature.
Ang pagbabago ng direksyon ng pag-ikot ng mga motor na may parallel na paggulo ay maaaring gawin sa pamamagitan ng pagbabago ng direksyon ng kasalukuyang sa paggulo ng paikot-ikot ng mga pole o sa pamamagitan ng pagbabago ng direksyon ng kasalukuyang sa armature winding. Karaniwan, ang pagbabago ng pag-ikot ay isinasagawa sa pangalawang paraan, dahil ang anumang mga operasyon na may paikot-ikot na paggulo ay mapanganib para sa mga tauhan ng operating at hindi kanais-nais dahil sa hitsura ng e. d.s. self-induction, na maaaring maging sanhi ng pagkasira ng winding insulation at pagkasunog ng mga contact.
Ang mga motor na may parallel excitation ay ginagamit sa mga network ng DC para magmaneho ng ilang makina, mga mekanismo (overhead electric road, pump, fan, weaving machine, rolling mill, mine hoists) na nangangailangan ng patuloy na bilis ng pag-ikot o malawak na pagsasaayos ng bilis.
23 .Anchor reaction, nito Negatibong impluwensya sa pagpapatakbo ng isang DC motor, mga paraan upang mabayaran ang reaksyon ng armature.
Reaksyon ng armature - ang epekto ng magnetic field na nilikha ng armature current sa magnetic field ng mga pangunahing pole ng makina. Sa idle mode, ang armature current = 0 at ang magnetic field ng makina ay nabuo lamang ng mga pangunahing pole (Fig (a)). Ito ay simetriko tungkol sa axis ng mga pangunahing pole at tungkol sa geometric na neutral. Kung patayin mo ang paikot-ikot na paggulo at ikonekta ang armature sa suplay ng kuryente, pagkatapos ang kasalukuyang dumadaloy sa armature winding ay lilikha ng magnetic field na ipinapakita sa Figure (b). ang axis ng mga pole ng field na ito ay tumutugma sa axis ng mga brush at patayo sa axis ng field ng mga pangunahing pole. Ang pag-ikot ng armature ay hindi nakakaapekto sa pattern ng armature field, dahil ang kasalukuyang pamamahagi sa armature winding ay nananatiling pare-pareho. Sa operating mode ng makina, ang parehong windings ay naka-on at ang magnetic field ay nabuo sa pamamagitan ng pagsusuma ng parehong field. Bilang isang resulta, ang axis ng magnetic field ay pinaikot ng ilang mga anggulo, ang pisikal na neutral ay pinaikot ng parehong anggulo. Sa motor mode, ang neutral ay inilipat laban sa pag-ikot. Bilang resulta ng displacement, bahagi ng mga conductor ng parallel branch na matatagpuan sa pagitan ng brush at neutral ay nasa ilalim ng poste ng tapat na polarity at lilikha ng braking torque. Ang pagbabago sa load ng makina ay hahantong sa pagbabago sa kasalukuyang armature at isang katumbas na pagtaas o pagbaba sa magnetic field nito. Samakatuwid, magbabago ang anggulo sa load. Bilang karagdagan sa neutral displacement, binabawasan ng armature reaction ang pangkalahatang magnetic flux dahil sa ang katunayan na ang field sa ilalim ng mga pangunahing pole ay nasira. Sa ilalim ng isang gilid ng poste, humihina ito, at sa ilalim ng iba pa ay tumataas, ngunit ang lakas ng field dahil sa saturation ng gilid ng poste ay mas mababa kaysa sa pagpapahina at bumababa ang nagresultang magnetic flux, na negatibong nakakaapekto sa pagganap ng enerhiya ng machine. Ang displacement ng pisikal na neutral ay mayroon ding negatibong epekto sa proseso ng paglipat. Ang pinaka-epektibong . paraan ng pagbabawas ang impluwensya ng anchor reaction ay paikot-ikot na kabayaran. Ito ay umaangkop sa mga espesyal na grooves ng mga pangunahing pole at konektado sa serye sa armature circuit. Ang magnetic field ng compensation winding ay kabaligtaran at binabayaran ang magnetic field ng armature. Compensation winding current = armature current, kaya ang compensation ay nangyayari sa lahat ng mode mula sa idle hanggang full load. Bilang resulta, ang larangan ng makina sa ilalim ng mga pangunahing poste ay nananatiling halos hindi nagbabago. Isa pang paraan - pagtaas clearance sa pagitan ng mga gilid ng pangunahing pole at ang anchor. Upang mapanatili ang daloy na may pagtaas sa puwang, kinakailangan ang pagtaas sa MMF ng paikot-ikot na paggulo.
Mga de-koryenteng makina ng DC.
Generator na may parallel excitation.
Mga formula ng pagkalkula:
Ang kasalukuyang ibinigay ng generator sa network:
Eds. generator: E \u003d U + Iya ∙Rya.
Naihatid ang kapangyarihan sa network: P2 \u003d U ∙ I \u003d I 2 ∙ R
Power ng motor ng drive: P1 = P2/ η
Pagkawala ng kapangyarihan sa armature winding:
Rya \u003d I 2 i ∙ Rya
Pagkawala ng kuryente sa field winding:
Рв = U ∙Iв = I 2 в∙ Rв
Kabuuang pagkalugi: ΣP = P1 - ...
R2.
Episyente ng generator:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Motor na may parallel na paggulo.
Mga formula ng pagkalkula:
Agos ng motor: I \u003d Ia + Iv
Boltahe ng makina: U \u003d E + Ii ∙Rya.
Nakonsumo ang kuryente mula sa network: Р1 = U∙I
Lakas ng baras: P 2 = P 1 ∙η
Sandali sa motor shaft:
M \u003d 9550 ∙ P 2 / n 2.
kahusayan ng makina:
η \u003d P 2 / P 1 \u003d (U∙I-ΣP) / U∙I
Halimbawa 6.1. Ang isang generator ng DC na may parallel excitation ay bumubuo ng isang rated boltahe Un = 220 V. Ang generator ay puno ng isang load Rn = 2.2 Ohm. Armature winding resistance Rya = 0.2 Ohm, excitation winding Rv = 220 Ohm. Episyente ng generator η = 0.87. Tukuyin ang mga sumusunod na dami:
1.load kasalukuyang; 2. armature kasalukuyang; 3. kasalukuyang paggulo; 4. generator emf;
5.net kapangyarihan; 6. pagkonsumo ng kuryente; 7. kabuuang pagkalugi sa generator; 8. pagkalugi sa armature winding; 9. pagkalugi sa paikot-ikot na paggulo.
1.Load kasalukuyang:
2. Kasalukuyang paggulo:
![]()
3. Armature kasalukuyang: Iа \u003d I - Iv \u003d 100 - 1 \u003d 99 A.
4. Emf generator:
E \u003d U + Ii ∙ Rya \u003d 220 + 99 0.1 \u003d 229.9 V.
5. netong kapangyarihan:
Р2 = Un ∙ I = 220 ∙ 100 = 22000 W = 22 kW.
6. Pagkonsumo ng kuryente:
7. Kabuuang pagkalugi sa generator:
ΣP \u003d P1 - P2 \u003d 25.87 - 22 \u003d 3.87 kW.
8. Pagkalugi sa armature winding:
Rya \u003d Iya 2 ∙Rya \u003d 99 2 ∙0.2 \u003d 1960.2 W.
9. Mga pagkalugi sa paikot-ikot na paggulo:
Pv = Un ∙ Iv = 220 ∙ 1 = 220 W.
Sagot: I = 100A; Iv \u003d 1 A; Ia = 99 A; E = 229.9 V; P2 = 22 kW;
P1 = 25.87 kW; ΣР = 3.87 kW; Rya = 1960.2 W; Pv \u003d 220 W.
Halimbawa 6.2. Fig. 8.2. Ang isang DC motor ng parallel excitation ay gumagana mula sa network na Un = 220 V. Bilis ng armature n2 = 1450 rpm. Kasalukuyang motor I \u003d 500 A, armature back emf E \u003d 202 V, paggulo winding resistance Rv \u003d 44 Ohms. kahusayan ng makina
η = 0.88. Tukuyin: 1. kasalukuyang paggulo; 2. armature kasalukuyang; 3. armature winding resistance; 4.pagkonsumo ng kuryente; 5. kapaki-pakinabang na kapangyarihan ng baras; 6 Kabuuang pagkalugi sa motor; 7. pagkalugi sa armature winding; 8. pagkalugi sa armature winding; 9.torque sa baras.
1. Kasalukuyang paggulo:
![]()
2. Armature kasalukuyang:
Ia \u003d I - Iv \u003d 500 -5 \u003d 495 A.
3. Armature winding resistance:
4. Pagkonsumo ng kuryente mula sa network:
P1 \u003d Un ∙ I \u003d 220 ∙ 500 \u003d 110,000 W \u003d 110 kW.
5. Net shaft power:
Р2 = P1 ∙ η = 110 ∙ 0.87 = 95.7 kW.
6. Kabuuang pagkalugi sa motor:
ΣP \u003d P1 - P2 \u003d 110 - 95.7 \u003d 14.3 kW.
Pinapayuhan ka naming basahin
 Sitwasyon sa malusog na pagkain "Mga bitamina na bumibisita sa mga bata
Sitwasyon sa malusog na pagkain "Mga bitamina na bumibisita sa mga bata Paano mabilis at madaling gumising sa umaga - madali at epektibong mga tip
Paano mabilis at madaling gumising sa umaga - madali at epektibong mga tip Mga sikolohikal na katangian ng mga bata sa pagdadalaga
Mga sikolohikal na katangian ng mga bata sa pagdadalaga Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan
Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan

