moment electromagnetic a motor sincron este creat prin interacțiunea curentului din înfășurarea rotorului cu un câmp magnetic rotativ.
Moment electromagnetic M proporțional cu puterea electromagnetică:
 (3.40)
(3.40)
Viteza de rotație unghiulară sincronă.
Înlocuind în (3.39) valoarea puterii electromagnetice (3.33), obținem:
 , (3.41)
, (3.41)
adică momentul electromagnetic al unui motor cu inducție este proporțional cu puterea pierderilor electrice din înfășurarea rotorului.
Dacă valoarea curentului rotorului conform expresiei (3.28) este substituită în (3.41), atunci obținem formula moment electromagnetic mașină asincronă (Nm):
 (3.42)
(3.42)
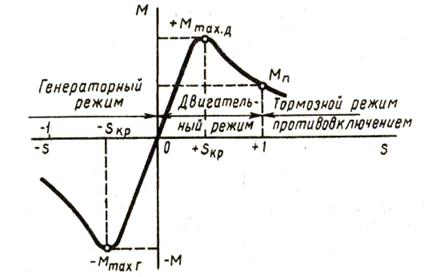
Parametrii circuitului echivalent al mașinii asincrone r 1 , r¢ 2 , x 1Și x¢ 2, incluse în expresia (3.42), sunt constante, deoarece valorile lor rămân practic neschimbate odată cu modificările sarcinii mașinii. Tensiunea de pe înfășurarea fazei statorului poate fi de asemenea considerată constantă. U 1 si frecventa f1. Din punct de vedere al momentului M singura variabilă este alunecarea s, care pentru diferite moduri de funcționare a unei mașini asincrone poate lua diferite valori în intervalul de la + ¥ la -¥ (vezi Fig. 3.5).
Luați în considerare dependența cuplului de alunecare M = f(s) la U 1= const, f1= parametrii const și constanți ai circuitului echivalent. Această dependență se numește caracteristica mecanica mașină asincronă. Analiza expresiei (3.42), care este o expresie analitică a unei caracteristici mecanice M = f(s), arată că pentru valorile de alunecare s= 0 și s= ¥ moment electromagnetic M= 0. De aici rezultă că caracteristica mecanică M = f(s) are un maxim.
Pentru a determina alunecarea critică s cr, corespunzător momentului maxim, este necesar să luăm derivata întâi a lui (3.42) și să o echivalăm cu zero: . Ca urmare
 (3.43)
(3.43)
Înlocuind valoarea alunecării critice (conform 3.43) în expresia pentru momentul electromagnetic (3.42), după o serie de transformări, se obține expresia momentului maxim (N m):
 (3.44)
(3.44)
În (3.43) și (3.44) semnul plus corespunde modului motor, iar semnul minus modului de funcționare generator al mașinii asincrone.
Pentru mașini asincrone scop general rezistența activă a înfășurării statorului r1 mult mai mică decât suma reactanelor inductive: r1< < (x 1 + x¢ 2). Prin urmare, neglijând valoarea r1, obținem expresii simplificate pentru alunecarea critică
 , (3.45)
, (3.45)
și cuplul maxim (N m)
 (3.46)
(3.46)
Orez. 3.10. Dependența modurilor de funcționare ale unei mașini asincrone de alunecare
Analiza expresiei (3.44) arată că moment maxim există mai multe mașini asincrone în modul generator decât în modul motor ( M max Г > М maxD). Pe fig. 3.4 prezintă caracteristica mecanică a unei mașini asincrone M = f(s) la U 1= const. Această caracteristică indică zonele corespunzătoare diferitelor moduri de funcționare: modul motor (0< s < 1), когда электромагнитный момент M se rotește; modul generator ( - ¥ < s < 0) и тормозной режим противовключением (1 < s < + ¥), когда электромагнитный момент M este inhibitor.
Din (3.42) rezultă că cuplul electromagnetic al unui motor cu inducție este proporțional cu pătratul tensiunii de rețea: M ≡ U 1 2. Acest lucru afectează foarte mult performanța motorului: chiar și o scădere ușoară a tensiunii de rețea determină o reducere vizibilă a cuplului motorului asincron. De exemplu, atunci când tensiunea rețelei este redusă cu 10% față de valoarea nominală ( U 1 = 0.9U nom) cuplul electromagnetic al motorului este redus cu 19%: М¢ = 0.9 2 M = 0.81M, Unde M— momentul la tensiunea nominală a rețelei și M¢ - cuplu la tensiune redusă.
Pentru a analiza funcționarea unui motor asincron, este mai convenabil să folosiți caracteristica mecanică M = f(s), prezentată în fig. 3.5.
 |
Orez. 3.11. Dependența cuplului electromagnetic al unui motor cu inducție de alunecare
Când motorul este conectat la rețea, câmpul magnetic al statorului, fără inerție, începe imediat să se rotească cu o frecvență sincronă. n 1, în același timp, rotorul motorului sub influența forțelor de inerție în momentul inițial al pornirii rămâne nemișcat ( n 2= 0) și alunecare s = 1.
Înlocuind în (3.42) alunecarea s= 1, obținem expresia pentru cuplul de pornire al unui motor asincron (N m):
 (3.47)
(3.47)
Sub acțiunea acestui moment, începe rotația rotorului motorului, în timp ce alunecarea scade, iar cuplul crește în conformitate cu caracteristica M = f(s). La alunecare critică s cr momentul atinge valoarea maximă M max.
Cu o creștere suplimentară a vitezei de rotație (reducerea alunecării), momentul Mîncepe să scadă până când atinge o valoare constantă egală cu suma momentelor de contracarare aplicate rotorului motorului: momentul XX M0și cuplul de sarcină util (cuplul pe arborele motorului) M 2, acesta este
M \u003d M 0 + M 2 \u003d M st. (3.48)
Trebuie avut în vedere faptul că, cu alunecări apropiate de unitate (modul de pornire al motorului), parametrii circuitului echivalent al unui motor asincron își schimbă semnificativ valorile. Acest lucru se explică în principal prin doi factori: saturația magnetică crescută a straturilor dintate ale statorului și rotorului, ceea ce duce la o scădere a rezistenței de scurgere inductive. x 1Și x 2, și efectul deplasării curentului în barele rotorului, ceea ce duce la o creștere a rezistenței active a înfășurării rotorului r 2 ¢. Prin urmare, parametrii circuitului echivalent al unui motor asincron utilizați în calculul cuplului electromagnetic conform (3.42), (3.44) și (3.46) nu pot fi utilizați pentru a calcula cuplul de pornire conform (3.47).
Moment static M st este egală cu suma momentelor de contracarare cu rotație uniformă a rotorului ( n 2= const). Să presupunem că momentul de contracarare pe arborele motorului M 2 corespunde sarcinii nominale a motorului. În acest caz, starea staționară a funcționării motorului este determinată de un punct pe caracteristica mecanică cu coordonate M = M nomȘi s = s nom, Unde M nomȘi s nom— valorile nominale ale cuplului electromagnetic și alunecării.
Din analiza caracteristicii mecanice mai rezultă, că funcționarea stabilă a unui motor cu inducție este posibilă cu alunecări mai mici decât valoarea critică (s< s кр ), adică în secțiunea OA a caracteristicii mecanice. Faptul este că în această zonă o modificare a sarcinii pe arborele motorului este însoțită de o modificare corespunzătoare a cuplului electromagnetic.
Deci, dacă motorul funcționa în modul nominal ( M nom; s nom), atunci momentele sunt egale: M nom \u003d M 0 + M 2. Dacă există o creștere a cuplului de sarcină M 2 până la valoare M¢ 2, atunci se va încălca egalitatea momentelor, adică. M nom< М 0 + М 2 , iar viteza rotorului va începe să scadă (alunecarea va crește). Acest lucru va duce la o creștere a cuplului electromagnetic până la o valoare M¢ \u003d M 0 + M¢ 2, (punctul B), după care modul de funcționare a motorului va deveni din nou constant.
Dacă, în timpul funcționării motorului în modul nominal, cuplul de sarcină scade la valoare М¢¢ 2, atunci egalitatea momentelor va fi încălcată din nou, dar acum cuplul va fi mai mare decât suma celor opuse: M nom > M 0 + M¢¢ 2. Viteza rotorului va începe să crească (alunecarea va scădea), iar acest lucru va duce la o scădere a cuplului electromagnetic M până la valoare M¢¢ \u003d M 0 + M¢¢ 2(punctul C); modul stabil de funcționare va fi restabilit, dar la alte valori MȘi s.
Funcționarea unui motor cu inducție devine instabilă în timpul alunecării s³s cr. Deci, dacă cuplul electromagnetic al motorului M = M max, și alunecă s = s cr, apoi chiar și o ușoară creștere a momentului de încărcare M 2, determinând o creștere a alunecării s, va duce la o scădere a cuplului electromagnetic M. Aceasta va fi urmată de o creștere suplimentară a alunecării și așa mai departe, până când alunecarea atinge valoarea s= 1, adică până când rotorul motorului se oprește.
Astfel, când cuplul electromagnetic atinge valoarea maximă, se instalează limita de funcționare stabilă a motorului cu inducție. Prin urmare, pentru funcționarea stabilă a motorului, este necesar ca suma momentelor de sarcină care acționează asupra rotorului să fie mai mică decât cuplul maxim: M st \u003d (M 0 + M 2)< М тах . Dar pentru ca funcționarea unui motor cu inducție să fie fiabilă și pentru ca suprasarcinile aleatorii pe termen scurt să nu determine oprirea motorului, este necesar ca acesta să aibă capacitate de suprasarcina.
Capacitatea de suprasarcină a motorului λ este determinată de raportul momentului maxim M max la nominal M nom. Pentru motoare cu inducție Capacitatea de suprasarcină de uz general este = 1,7 ÷ 2,5.
De asemenea, ar trebui să acordați atenție faptului că funcționarea motorului la alunecare s< s кр , adică în secțiunea de lucru a caracteristicii mecanice, este cea mai economică, deoarece corespunde unor valori mici de alunecare și, în consecință, unor valori mai mici ale pierderilor electrice în înfășurarea rotorului. P e2 \u003d sP em.
Utilizarea formulei (3.35) pentru calcularea caracteristicilor mecanice ale motoarelor asincrone nu este întotdeauna posibilă, deoarece parametrii circuitului echivalent al motorului nu sunt de obicei indicați în cataloage și cărți de referință, prin urmare, pentru calcule practice, o formulă simplificată a cuplului este de obicei folosit. Această formulă se bazează pe ipoteza că rezistența activă a înfășurării statorului a unui motor cu inducție r1= 0, în timp ce:
 (3.49)
(3.49)
Alunecarea critică este determinată de formula:
![]() . (3.50)
. (3.50)
Calculul caracteristicii mecanice este mult mai simplu dacă se realizează în unități relative  . În acest caz, ecuația caracteristică mecanică are forma:
. În acest caz, ecuația caracteristică mecanică are forma:
 . (3.51)
. (3.51)
Utilizarea unei formule simplificate (3.51) este cea mai potrivită atunci când se calculează secțiunea de lucru a caracteristicii mecanice în timpul alunecării s< s кр , deoarece în acest caz eroarea nu depășește valorile permise pentru calculele tehnice. La alunecare s > s cr eroarea poate ajunge la 15-17%.
Caracteristicile mecanice ale unui motor asincron cu modificări ale tensiunii de rețea și ale rezistenței active a înfășurării rotorului
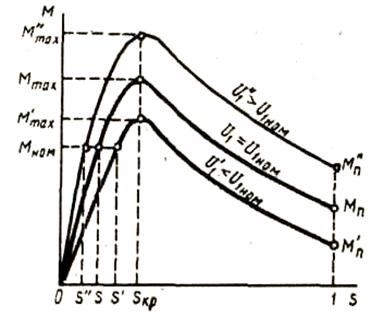
Din (3.42), (3.44) și (3.47) se poate observa că cuplul electromagnetic al motorului cu inducție, precum și valorile maxime și de pornire ale acestuia, sunt proporționale cu pătratul tensiunii furnizate înfășurării statorului: M ≡ U12.În același timp, analiza expresiei (3.43) arată că valoarea alunecării critice nu depinde de efort. U 1 . Acest lucru ne oferă posibilitatea de a trasa caracteristicile mecanice M = f(e) Pentru valori diferite Voltaj U 1(Fig. 3.12), din care rezultă că fluctuaţiile tensiunii de reţea U 1 despre el valoare nominala U 1nom sunt însoțite nu numai de modificări ale cuplurilor maxime și de pornire, ci și de modificări ale turației rotorului.
 |
Orez. 3.12. Influența tensiunii asupra tipului de caracteristică mecanică a unui motor cu inducție
Odată cu scăderea tensiunii de rețea, viteza rotorului scade (alunecarea crește). Voltaj U 1 influenţează atribuirea momentului maxim M tah, precum şi capacitatea de suprasarcină a motorului. Deci dacă tensiunea U 1 a scăzut cu 30%, adică U 1 \u003d 0,7U nom, atunci cuplul maxim al motorului cu inducție va fi mai mult de jumătate:
M¢ max = 0,7 2 M max = 0.49M max.
Cu cât va scădea capacitatea de suprasarcină a motorului Dacă, de exemplu, la tensiunea nominală a rețelei, capacitatea de suprasarcină  , apoi când tensiunea scade cu 30%, capacitatea de suprasarcină a motorului
, apoi când tensiunea scade cu 30%, capacitatea de suprasarcină a motorului  , adică | motorul nu poate suporta nici măcar sarcina nominală.
, adică | motorul nu poate suporta nici măcar sarcina nominală.
După cum rezultă din (3.44), valoarea cuplului maxim al motorului nu depinde de rezistența activă a rotorului r¢ 2 . Cât despre alunecarea critică s cr, apoi, după cum se poate observa din (3.43), este proporțional cu rezistența r¢ 2 . Astfel, dacă într-un motor asincron rezistența activă a circuitului rotorului crește treptat, atunci valoarea cuplului maxim va rămâne neschimbată, iar alunecarea critică va crește (Fig. 3.13). În acest caz, cuplul de pornire al motorului M P crește odată cu creșterea rezistenței r¢ 2 până la o anumită valoare. În figură, aceasta corespunde rezistenței r¢ 2 III, la care cuplul de pornire este egal cu cel maxim. Cu o creștere suplimentară a rezistenței r¢ 2 cuplul de pornire este redus.
 |
Orez. 3.13. Influența rezistenței active a înfășurării rotorului asupra caracteristicilor mecanice ale unui motor asincron.
Analiza grafică M = f(s), prezentată în fig. 3.13 mai arată că modificările rezistenței rotorului r¢ 2însoţită de modificări ale vitezei de rotaţie: cu o creştere r¢ 2 cu moment de sarcină constant M st alunecarea crește, adică viteza scade (puncte 1, 2, 3 Și 4).
Influența rezistenței active a înfășurării rotorului asupra formei caracteristicilor mecanice ale motoarelor asincrone este utilizată în proiectarea motoarelor. De exemplu, motoarele asincrone de uz general trebuie să aibă o caracteristică de viteză „dură” (vezi Fig. 3.11), adică să funcționeze cu o alunecare nominală mică. Acest lucru se realizează prin utilizarea unei înfășurări de rotor cu rezistență activă scăzută în motor. r¢ 2.În acest caz, motorul are o eficiență mai mare datorită reducerii pierderilor electrice în înfășurarea rotorului ( R e2 \u003d m 1 I¢ 2 2 r¢ 2). Valoarea selectată r¢ 2 trebuie să asigure motorului cuplul de pornire necesar.
Dacă este necesar să se obțină un motor cu o valoare crescută a cuplului de pornire, rezistența activă a înfășurării rotorului este crescută. Dar, în același timp, se obține un motor cu o valoare mare a alunecării nominale și, în consecință, cu o eficiență mai mică.
Dependențe considerate M \u003d f (U 1)Și M = f(r 2 ") au, de asemenea, o mare importanță practică atunci când se iau în considerare problemele de pornire și control al vitezei de rotație a motoarelor asincrone.
Caracteristicile de performanță ale motorului asincron
Caracteristicile de performanță ale unui motor cu inducție (Fig. 3.14) sunt dependențe exprimate grafic ale vitezei de rotație n 2, eficienta h, moment util (cuplu pe arbore) M 2, factor de putere cosφ 1, și curentul statorului eu 1, de la putere utilă R 2 la U 1= const and f1= const.

Orez. 3.14. Caracteristicile de performanță ale motorului asincron
caracteristica vitezein 2 \u003d f (P 2).
Viteza rotorului motorului cu inducție
n 2 \u003d n 1 (1-s).
Alunecare pe (3.33)
adică, alunecarea motorului și, prin urmare, viteza acestuia, este determinată de raportul dintre pierderile electrice din rotor și puterea electromagnetică. R em.
Neglijând pierderile electrice din rotor în modul inactiv, putem lua R e2= 0 și, prin urmare s0 ≈ 0 și n 20 ≈ n 1,. Pe măsură ce sarcina pe arborele motorului crește, raportul (8,1) crește, atingând valori de 0,01 ÷ 0,08 la sarcina nominală. În conformitate cu această dependenţă n 2 = f(P 2) este o curbă ușor înclinată față de axa x.
Cu toate acestea, cu o creștere a rezistenței active a rotorului r¢ 2 panta acestei curbe crește. În acest caz, modificări ale vitezei de rotație p 2în timpul fluctuațiilor de sarcină R 2 crește. Acest lucru se explică prin faptul că odată cu creșterea r¢ 2 pierderile electrice în rotor cresc [vezi. (3.31)].
Performanță mecanică M 2 = f(P 2)
Dependența momentului util de arborele motorului M 2 din puterea netă R 2 este definit de expresia
 (3.53)
(3.53)
Unde R 2— putere utilă, W;
este frecvența unghiulară de rotație a rotorului.
Din această expresie rezultă că dacă n 2= const, apoi graficul M 2 \u003d f (P 2) este o linie dreaptă. Dar într-un motor asincron cu sarcină în creștere R 2 turația rotorului scade și deci momentul util pe arbore M 2 odată cu creșterea sarcinii, crește oarecum mai repede decât sarcina și, prin urmare, graficul M 2 = f(P2) are un aspect curbiliniu.
Dependența cosφ 1 = f(P 2)
Datorită faptului că curentul statoric eu 1 are o componentă reactivă (inductivă) necesară pentru a crea un câmp magnetic în stator, factorul de putere al motoarelor asincrone este mai mic de unu.
Cea mai mică valoare a factorului de putere corespunde modului XX. Acest lucru se explică prin faptul că actualul XX eu 0 sub orice sarcină rămâne practic neschimbată. Prin urmare, la sarcini mici ale motorului, curentul statorului este mic și în mare măsură reactiv ( I 1 ≈ I 0). Ca urmare, defazarea curentului statorului în raport cu tensiunea este semnificativă ( φ ≈ φ 0 ), doar cu puțin mai puțin de 90° (Fig. 3.15).
Factorul de putere al motoarelor asincrone în modul XX nu depășește de obicei 0,2. Odată cu creșterea sarcinii pe arborele motorului, componenta activă a curentului crește eu 1 iar factorul de putere crește, atingând cea mai mare valoare (0,80 ÷ 0,90) la o sarcină apropiată de cea nominală.
 |
Fig.3.15. Diagrama vectorială a unui motor cu inducție sub sarcină ușoară
O creștere suplimentară a sarcinii este însoțită de o scădere cosφ 1, care se explică prin creșterea rezistenței inductive a rotorului ( x 2s) prin creșterea alunecării și deci a frecvenței curentului în rotor. Pentru a îmbunătăți factorul de putere al motoarelor asincrone, este extrem de important ca motorul să funcționeze întotdeauna, sau cel puțin o parte semnificativă a timpului, cu o sarcină apropiată de sarcina nominală.
Acest lucru poate fi asigurat doar dacă alegerea potrivita puterea motorului. Dacă motorul funcționează subîncărcat pentru o parte semnificativă a timpului, atunci să crească cosφ 1 tensiune aplicată corespunzător motorului U 1 scădea.
De exemplu, la motoarele care funcționează cu o conexiune delta a înfășurării statorului, acest lucru se poate face prin reconectarea înfășurărilor statorului într-o stea, ceea ce va determina o scădere a tensiunea de fază la timp. În acest caz, fluxul magnetic al statorului și, în consecință, curentul de magnetizare, scade cu aproximativ un factor. În plus, componenta activă a curentului statorului crește oarecum. Toate acestea contribuie la creșterea factorului de putere al motorului.
Pe fig. 3.16 prezintă grafice de dependență cosφ 1 motor asincron de sarcină la conectarea înfășurărilor statorului cu o stea (curbă 1 ) și un triunghi (curbă 2).
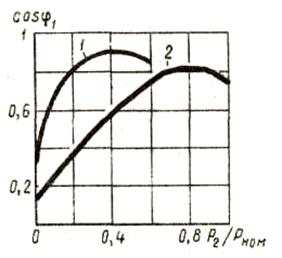
Orez. 3.16. Dependenta cosφ 1 de la sarcină la conectarea înfășurării statorului cu o stea (1) și o deltă (2).
Întrebări pentru autoexaminare
1. Explicați principiul de funcționare al unei mașini asincrone.
2. Descrieți modurile de funcționare ale unei mașini asincrone.
3. Ce se numește alunecarea unei mașini asincrone?
4. Scrieți ecuațiile de tensiune pentru un motor cu inducție?
5. Notați ecuațiile MMF și curenții motorului cu inducție.
6. Desenați circuitele echivalente ale unui motor cu inducție.
7. Desenați o diagramă vectorială a unui motor cu inducție.
8. Ce pierderi există la un motor asincron? Desenați o diagramă de energie pentru un motor cu inducție.
9. Notați formula pentru cuplul electromagnetic al unui motor cu inducție.
10. Desenați un grafic al caracteristicii mecanice a unui motor cu inducție.
11. Cum se modifică caracteristicile mecanice ale unui motor asincron în funcție de modificarea tensiunii de rețea și de rezistența activă a rotorului?
12. Desenați caracteristicile de funcționare ale unui motor cu inducție.
Caracteristicile de performanță ale motorului asincron
LUCRĂRI ÎN ELECTROGENIE
„Caracteristicile de performanță ale motorului asincron”
Introducere
O mașină electrică asincronă este o mașină electrică cu curent alternativ în care viteza rotorului nu este egală cu viteza câmpului magnetic al statorului și depinde de sarcină. Este folosit în principal ca motor și ca generator. Statorul are caneluri în care este plasată o înfășurare monofazată sau multifazată (de obicei trifazată), conectată la rețeaua de curent alternativ. Această înfășurare este concepută pentru a crea un câmp magnetic în mișcare, circular rotativ - pentru mașinile trifazate și eliptică pulsatorie sau rotativă - pentru mașinile monofazate. Rotorul este o parte rotativă a unei mașini electrice, concepută și pentru a crea un câmp magnetic, care, interacționând cu câmpul statorului, duce la crearea unui cuplu electromagnetic care determină direcția de conversie a energiei. Pentru generatoare, acest moment este de natură de frânare, contracarând cuplul motorului primar, care pune rotorul în mișcare. La motoare, dimpotriva, acest moment este condusul, depasind rezistenta mecanismului actionat de rotor.
Un generator asincron este o mașină electrică asincronă care funcționează în modul generator. O sursă auxiliară de curent electric de putere redusă și un dispozitiv de frânare (într-o unitate electrică).
Un motor electric asincron este o mașină electrică asincronă care funcționează în modul motor. Cel mai comun motor electric asincron trifazat (inventat în 1889 de MO Dolivo-Dobrovolsky). Motoarele asincrone sunt relativ simple în proiectare și fiabile în funcționare, dar au o gamă limitată de viteze și un factor de putere scăzut la sarcini mici. Putere de la fracțiuni de W la zeci de MW.
1. Motor asincron
1.1 Frecvența de rotație a câmpului magnetic și a rotorului
Lăsa n1 este frecvența de rotație a câmpului magnetic. Un sistem de curent alternativ multifazic creează un câmp magnetic rotativ, a cărui viteză de rotație pe minut este n1=60f1/p, unde f1 este frecvența curentului, p este numărul de perechi de poli formate de fiecare fază a statorului. serpuit, cotit.
n2- frecventa de rotatie a rotorului. Dacă rotorul se rotește la o frecvență nu egală cu frecvența rotația câmpului magnetic (n2≠n1), atunci această frecvență se numește asincronă. Într-un motor asincron, fluxul de lucru poate rula doar la o frecvență asincronă.
În timpul funcționării, viteza rotorului este întotdeauna mai mică decât viteza câmpului.
(n2< n1)
1.2 Principiul de funcționare a unui motor asincron
La motoarele asincrone, un câmp magnetic rotativ este creat de un sistem trifazat atunci când este conectat la o rețea de curent alternativ. Câmpul magnetic rotativ al statorului traversează conductoarele înfășurării rotorului și induce f.e.m. în ele. Dacă înfășurarea rotorului este închisă la orice rezistență sau scurtcircuitată, atunci sub acțiunea emf indusă. trece curentul. Ca urmare a interacțiunii curentului din înfășurarea rotorului cu o rotație camp magneticînfășurarea statorului creează un cuplu, sub influența căruia rotorul începe să se rotească în direcția de rotație a câmpului magnetic. Pentru a schimba direcția de rotație a rotorului, este necesar să schimbați oricare două dintre cele trei fire care conectează înfășurarea statorului la rețea în raport cu bornele rețelei.
1.3 Dispozitivul unui motor asincron
Miezul statorului este recrutat din plăci de oțel, de 0,35 sau 0,5 mm grosime. Plăcile sunt ștanțate cu caneluri și fixate în cadrul motorului. Patul este instalat pe fundație. Conductoarele înfășurării sale sunt așezate în canelurile longitudinale ale statorului, care sunt interconectate astfel încât să se formeze un sistem trifazat. Pentru a conecta înfășurările statorului la o rețea trifazată, acestea pot fi conectate în stea sau în deltă. Acest lucru face posibilă pornirea motorului într-o rețea cu tensiuni diferite. Pentru tensiuni mai mici (220/127 V), înfășurarea statorului este conectată într-un triunghi, pentru tensiuni mai mari (380/220 V) - în stea. Miezul rotorului este, de asemenea, realizat din plăci de oțel cu o grosime de 0,5 mm. Plăcile sunt ștanțate cu caneluri și asamblate în pachete care sunt montate pe arborele mașinii. Din pachete se formează un cilindru cu caneluri longitudinale, în care sunt așezați conductoarele înfășurării rotorului. În funcție de tipul de înfășurare a rotorului, mașinile asincrone pot fi rotor de fază și cușcă veveriță. Rezistența nu poate fi inclusă într-o înfășurare scurtcircuitată. În înfășurarea de fază, conductoarele sunt interconectate, formând un sistem trifazat. înfăşurări trei faze legate de o stea. Înfășurarea rotorului poate fi scurtcircuitată sau scurtcircuitată. Motoarele cu rotor cu colivie sunt mai simple și mai ieftine, dar motoarele cu rotor de fază au proprietăți de pornire și reglare mai bune (se folosesc la puteri mari). Puterea motoarelor asincrone variază de la câteva zeci de wați la 15.000 kW la o tensiune de înfășurare a statorului de până la 6 kV. Dezavantajul motoarelor asincrone este factorul de putere scăzut.
1.4 Funcționarea unui motor asincron sub sarcină
n1 este frecvența de rotație a câmpului magnetic al statorului. n2- frecventa de rotatie a rotorului.
n1 >n2
Câmpul magnetic al statorului se rotește în aceeași direcție cu rotorul și alunecă față de rotor cu o frecvență ns= n1 – n2
Întârzierea rotorului față de câmpul magnetic rotativ al statorului este caracterizată de alunecare S= ns / n1, => S = (n1 - n2) / n1
Dacă rotorul este staționar, atunci n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Dacă rotorul se rotește sincron cu câmpul magnetic, atunci alunecarea S= 0.
La ralanti, adică atunci când nu există nicio sarcină pe arborele motorului, alunecarea este neglijabilă și poate fi luată egală cu 0. Sarcina pe arborele rotorului poate fi, de exemplu, o freză de strung. Creează cuplu de frânare. Dacă cuplul și cuplul de frânare sunt egale, motorul va funcționa stabil. Dacă sarcina pe arbore a crescut, atunci cuplul de frânare va deveni mai mare decât cuplul și viteza rotorului n2 scădea. Conform formulei S =(n1 - n2) / n1 alunecarea va crește. Deoarece câmpul magnetic al statorului alunecă față de rotor cu o frecvență ns= n1 – n2, atunci va traversa mai des conductoarele rotorului, curentul si cuplul motorului vor creste in ele, care in curand vor deveni egale cu cuplul de franare. Când sarcina scade, cuplul de frânare devine mai mic decât cuplul, crește n2 si scade S. EMF scade și curentul rotorului și cuplul sunt din nou egale cu frâna. Fluxul magnetic în spațiul de aer al mașinii rămâne aproximativ constant pentru orice modificare a sarcinii.
2. Caracteristicile de performanță ale motorului asincron
Performanța unui motor cu inducție este dependentă
S - alunecare
n2 - viteza rotorului
M - momentul dezvoltat
I1 consum de curent
P1 intrare de putere
factor de putere COSφ
Din puterea utilă P2 pe arborele mașinii.
Aceste caracteristici sunt eliminate în condiții naturale. Frecvența curentului f1 și tensiunea U1 rămân constante. Se modifică doar sarcina pe arborele motorului.
Pe măsură ce sarcina pe arborele motorului crește, S crește. Când motorul este la ralanti n2≈n1 și S≈0. La sarcina nominală, alunecarea este de obicei de 3 până la 5%.
Odată cu creșterea sarcinii pe arborele motorului, viteza de rotație n2 scade. Cu toate acestea, modificarea vitezei cu creșterea sarcinii de la 0 la nominal este foarte mică și nu depășește 5%. Prin urmare, caracteristica de turație a unui motor cu inducție este rigidă. Curba are o pantă foarte mică față de axa orizontală.
Cuplu M, dezvoltat de motor, este echilibrat de cuplul de frânare de pe arbore Mt si moment М0, urmând să depășească pierderile mecanice, adică M \u003d Mt + M0 \u003d P2 /Ω2+ М0, Unde R2– putere utilă a motorului , Ω 2 - viteza unghiulara a rotorului. La ralanti M= M0. Odată cu creșterea sarcinii, cuplul crește și, datorită unei scăderi ușoare a turației rotorului, creșterea cuplului are loc mai repede decât puterea utilă pe arbore.
Curentul I1 consumat de motor din rețea variază neuniform odată cu creșterea sarcinii pe arborele motorului. La ralanti, factorul de putere COSφ este mic. Iar curentul are o componentă reactivă mare. La sarcini mici pe arborele motorului, componenta activă a curentului statorului este mai mică decât componenta reactivă, astfel încât componenta activă a curentului are un efect redus asupra curentului I1. La sarcini mari, componenta activă a curentului statorului devine mai mare decât cea reactivă, iar o modificare a sarcinii determină o modificare semnificativă a curentului I1.
Dependența grafică a puterii consumate de motorul P1 este reprezentată ca o linie aproape dreaptă, ușor deviând în sus la sarcini mari, ceea ce se explică printr-o creștere a pierderilor în înfășurările statorului și rotorului odată cu creșterea sarcinii.
Dependența factorului de putere COSφ de sarcina pe arborele motorului este următoarea. La ralanti, СOSφ este mic, aproximativ 0,2. Deoarece componenta activă a curentului statorului, din cauza pierderilor de putere din mașină, este mică în comparație cu componenta reactivă a acestui curent, care creează un flux magnetic. Odată cu creșterea sarcinii pe arbore, СOSφ crește, atingând valoarea maximă de 0,8–0,9, ca urmare a creșterii componentei active a curentului statorului. La sarcini foarte mari, există o scădere ușoară a COSφ, deoarece, ca urmare a creșterii semnificative a alunecării și a frecvenței curentului în rotor, reactanța înfășurării rotorului crește.
Curba randamentului η are aceeași formă ca în orice mașină sau transformator. La ralanti, randament = 0. Odată cu creșterea sarcinii pe arborele motorului, eficiența crește brusc și apoi scade. Eficiența atinge cea mai mare valoare la o astfel de sarcină, atunci când pierderile de putere în oțel și pierderile mecanice, care nu depind de sarcină, sunt egale cu pierderile de putere în înfășurările statorului și rotorului, care depind de sarcină.
Rezumate similare:
Varietăți de micromotoare executive asincrone: cu rotor gol nemagnetic și magnetic; cu o înfăşurare scurtcircuitată ca o roată de veveriţă. Schema unei caneluri semiînchise a circuitului magnetic. Crearea unui câmp magnetic rotativ de către un stator bifazat.
Dispozitivul unei mașini asincrone trifazate, elementele sale principale, modurile și principiul de funcționare, istoricul creării și aplicării pe stadiul prezent. Procedura și condițiile pentru obținerea unui câmp magnetic rotativ. Dependența cuplului electromagnetic de alunecare.
Determinarea momentului total de inerție al cutiei de viteze, troliului și sarcină redusă la arborele motorului. Calculul momentului de rezistență redus la arbore în timpul urcării, coborârii. Valoarea puterii pe arborele cutiei de viteze. Motivul diferenței de putere la ridicarea și coborârea sarcinii.
Calculul și proiectarea motorului, selectarea dimensiunilor principale, calculul înfășurării statorului. Calculul dimensiunilor zonei dentare a statorului și alegerea spațiului de aer. Modelarea motorului în mediul MatLab Power System Blockset, precum și cu parametrii de mod nominal.
Protecția principală și de rezervă a turbogeneratorului.
Dispozitiv și imagine condiționată a sincronului mașină trifazată. Locația polilor câmpului magnetic al statorului și rotorului. Dependența cuplului electromagnetic al unei mașini sincrone de unghi. schema de includere a motorului sincron la frânarea dinamică.
Informații generale despre mașinile asincrone (cu două înfășurări mașini electrice curent alternativ). Proiectarea pieselor active, ansamblurilor de rulmenți, dispozitivul de intrare al micromotorului asincron 4АА50В2, principiul funcționării acestuia, domeniile de aplicare și semnificația.
Proiectarea unui motor electric asincron trifazat cu rotor cu colivie. Alegerea motorului analog, dimensiuni, configurație, material circuit magnetic. Determinarea coeficientului de înfășurare a statorului, calculul mecanic al arborelui și al rulmenților.
Calculul unui motor asincron cu rotor cu colivie. Alegerea dimensiunilor principale. Calculul dimensiunilor zonei dentare a statorului și întrefier, rotor, curent de magnetizare. Parametrii modului de funcționare. Calculul pierderilor, caracteristicile de funcționare și de pornire.
Informații generale despre mașinile asincrone. Informații generale despre modurile de funcționare ale unui motor asincron. Definirea analitică și grafică a modurilor de funcționare a unei mașini de reconstrucție asincronă.
Caracteristici ale dezvoltării unui motor electric asincron cu un rotor cu colivie de tip 4А160S4У3 bazat pe o mașină generalizată. Calculul modelului matematic al unui motor asincron sub formă de Cauchy 5. Adecvarea modelului de pornire directă a unui motor asincron.
Metoda de calcul al circuitului magnetic generator sincron, alegerea dimensiunilor și configurației sale, construcția caracteristicilor de magnetizare a mașinii. Determinarea parametrilor de înfășurare, efectuarea calculelor termice și de ventilație, desenul de montaj al generatorului.
Inadmisibilitatea multiplelor pornire asincronă motor sincron, care duce la o cădere semnificativă de tensiune în sistemul de alimentare, la apariția unor forțe dinamice semnificative în părțile frontale ale înfășurării statorului și la îmbătrânirea termică a izolației.
Construirea diagramei de sarcină a actuatorului. Alegerea elementelor circuitului de putere. Calculul caracteristicilor mecanice. Evaluarea necesității de feedback de viteză. Determinarea randamentului mediu al sistemului. Procese tranzitorii în unitate.
Informații generale despre dispozitive reglare automată excitarea mașinilor sincrone. Factori care afectează tensiunea și circuitul de alimentare. Dispozitiv de amestecare curent: modificări necesare în caracteristicile unei mașini de amestecare.
Circuit magnetic al motorului. Dimensiuni, configurație, material. Miezul statorului, rotorul și piesa polară. Calculul circuitului magnetic. Decalaj, dinți și spate stator. Activ și reactanța inductivăînfășurări statorice pentru starea staționară.
LUCRĂRI ÎN ELECTROGENIE
„Caracteristicile de performanță ale motorului asincron”
Introducere
asincron mașină electrică- aceasta este o mașină electrică de curent alternativ, în care viteza rotorului nu este egală cu viteza câmpului magnetic al statorului și depinde de sarcină. Este folosit în principal ca motor și ca generator. Statorul are caneluri în care este plasată o înfășurare monofazată sau multifazată (de obicei trifazată), conectată la rețeaua de curent alternativ. Această înfășurare este concepută pentru a crea un câmp magnetic în mișcare, circular rotativ - pentru mașinile trifazate și eliptică pulsatorie sau rotativă - pentru mașinile monofazate. Rotorul este o parte rotativă a unei mașini electrice, concepută și pentru a crea un câmp magnetic, care, interacționând cu câmpul statorului, duce la crearea unui cuplu electromagnetic care determină direcția de conversie a energiei. Pentru generatoare, acest moment este de natură de frânare, contracarând cuplul motorului primar, care pune rotorul în mișcare. La motoare, dimpotriva, acest moment este condusul, depasind rezistenta mecanismului actionat de rotor.
Un generator asincron este o mașină electrică asincronă care funcționează în modul generator. Sursa auxiliara curent electric putere redusă și dispozitiv de frânare (în tracțiunea electrică).
Un motor electric asincron este o mașină electrică asincronă care funcționează în modul motor. Cel mai comun motor electric asincron trifazat (inventat în 1889 de MO Dolivo-Dobrovolsky). Motoare asincrone sunt relativ simple în design și fiabile în funcționare, dar au o gamă limitată de viteză și un factor de putere scăzut la sarcini ușoare. Putere de la fracțiuni de W la zeci de MW.
1. Motor asincron
1.1 Frecvența de rotație a câmpului magnetic și a rotorului
Lăsa n 1 este frecvența de rotație a câmpului magnetic. Un sistem de curent alternativ multifazic creează un câmp magnetic rotativ, a cărui viteză de rotație pe minut este n1=60f1/p, unde f1 este frecvența curentului, p este numărul de perechi de poli formate de fiecare fază a statorului. serpuit, cotit.
n 2 - frecventa de rotatie a rotorului. Dacă rotorul se rotește cu o frecvență care nu este egală cu frecvența de rotație a câmpului magnetic (n2≠n1), atunci această frecvență se numește asincronă. Într-un motor asincron, fluxul de lucru poate rula doar la o frecvență asincronă.
În timpul funcționării, viteza rotorului este întotdeauna mai mică decât viteza câmpului.
( n 2< n 1)
1.2 Principiul de funcționare a unui motor asincron
La motoarele asincrone, un câmp magnetic rotativ este creat de un sistem trifazat atunci când este conectat la o rețea de curent alternativ. Câmpul magnetic rotativ al statorului traversează conductoarele înfășurării rotorului și induce f.e.m. în ele. Dacă înfășurarea rotorului este închisă la orice rezistență sau scurtcircuitată, atunci sub acțiunea emf indusă. trece curentul. Ca urmare a interacțiunii curentului din înfășurarea rotorului cu câmpul magnetic rotativ al înfășurării statorului, se creează un cuplu, sub influența căruia rotorul începe să se rotească în direcția de rotație a câmpului magnetic. Pentru a schimba direcția de rotație a rotorului, este necesar să schimbați oricare două dintre cele trei fire care conectează înfășurarea statorului la rețea în raport cu bornele rețelei.
1.3 Dispozitivul unui motor asincron
Miezul statorului este recrutat din plăci de oțel, de 0,35 sau 0,5 mm grosime. Plăcile sunt ștanțate cu caneluri și fixate în cadrul motorului. Patul este instalat pe fundație. Conductoarele înfășurării sale sunt așezate în canelurile longitudinale ale statorului, care sunt interconectate astfel încât să se formeze un sistem trifazat. Pentru a conecta înfășurările statorului la retea trifazata pot fi conectate stea sau delta. Acest lucru face posibilă pornirea motorului într-o rețea cu tensiuni diferite. Pentru tensiuni mai mici (220/127 V), înfășurarea statorului este conectată într-un triunghi, pentru tensiuni mai mari (380/220 V) - în stea. Miezul rotorului este, de asemenea, realizat din plăci de oțel cu o grosime de 0,5 mm. Plăcile sunt ștanțate cu caneluri și asamblate în pachete care sunt montate pe arborele mașinii. Din pachete se formează un cilindru cu caneluri longitudinale, în care sunt așezați conductoarele înfășurării rotorului. În funcție de tipul de înfășurare a rotorului mașini asincrone poate fi cu fază și în scurtcircuit rotor. Rezistența nu poate fi inclusă într-o înfășurare scurtcircuitată. În înfășurarea de fază, conductoarele sunt interconectate, formând un sistem trifazat. Înfășurările celor trei faze sunt conectate printr-o stea. Înfășurarea rotorului poate fi scurtcircuitată sau scurtcircuitată. Motoarele cu rotor cu colivie sunt mai simple și mai ieftine, dar motoarele cu rotor de fază au proprietăți de pornire și reglare mai bune (se folosesc la puteri mari). Puterea motoarelor asincrone variază de la câteva zeci de wați la 15.000 kW la o tensiune de înfășurare a statorului de până la 6 kV. Dezavantajul motoarelor asincrone este factorul de putere scăzut.
1.4 Funcționarea unui motor asincron sub sarcină
n 1 este frecvența de rotație a câmpului magnetic al statorului. n 2 - frecventa de rotatie a rotorului.
n 1 > n 2
Câmpul magnetic al statorului se rotește în aceeași direcție cu rotorul și alunecă față de rotor cu o frecvență n s = n 1 – n 2
Întârzierea rotorului față de câmpul magnetic rotativ al statorului este caracterizată de alunecare S = n s / n 1, => S = ( n 1 – n 2) / n 1
Dacă rotorul este staționar, atunci n 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1
Dacă rotorul se rotește sincron cu câmpul magnetic, atunci alunecarea S= 0.
La ralanti, adică în absența unei sarcini pe arborele motorului, alunecarea este neglijabilă și poate fi luată egală cu 0. Sarcina pe arborele rotorului poate fi, de exemplu, un tăietor strung. Creează cuplu de frânare. Dacă cuplul și cuplul de frânare sunt egale, motorul va funcționa stabil. Dacă sarcina pe arbore a crescut, atunci cuplul de frânare va deveni mai mare decât cuplul și viteza rotorului n 2 scădea. Conform formulei S = ( n 1 – n 2) / n 1 alunecarea va crește. Deoarece câmpul magnetic al statorului alunecă față de rotor cu o frecvență n s = n 1 – n 2, atunci va traversa mai des conductoarele rotorului, curentul si cuplul motorului vor creste in ele, care in curand vor deveni egale cu cuplul de franare. Când sarcina scade, cuplul de frânare devine mai mic decât cuplul, crește n 2 si scade S . EMF scade și curentul rotorului și cuplul sunt din nou egale cu frâna. Fluxul magnetic în spațiul de aer al mașinii rămâne aproximativ constant pentru orice modificare a sarcinii.
2. Caracteristicile de performanță ale motorului asincron
Performanța unui motor cu inducție este dependentă
S - alunecare
n2 - viteza rotorului
M - momentul dezvoltat
I1 consum de curent
P1 intrare de putere
factor de putere COSφ
Din puterea utilă P2 pe arborele mașinii.
Aceste caracteristici sunt eliminate în condiții naturale. Frecvența curentului f1 și tensiunea U1 rămân constante. Se modifică doar sarcina pe arborele motorului.
Pe măsură ce sarcina pe arborele motorului crește, S crește. Când motorul este la ralanti n2≈n1 și S≈0. La sarcina nominală, alunecarea este de obicei de 3 până la 5%.
Odată cu creșterea sarcinii pe arborele motorului, viteza de rotație n2 scade. Cu toate acestea, modificarea vitezei cu creșterea sarcinii de la 0 la nominal este foarte mică și nu depășește 5%. De aceea, caracteristica vitezei motorul cu inducție este dur. Curba are o pantă foarte mică față de axa orizontală.
Cuplu M, dezvoltat de motor, este echilibrat de cuplul de frânare de pe arbore Mt si moment M 0 , urmând să depășească pierderile mecanice, adică M = Mt + M 0 =P 2 /Ω 2 + M 0 , Unde R 2 – putere utilă a motorului , Ω 2 - viteza unghiulara a rotorului. La ralanti M=M 0. Odată cu creșterea sarcinii, cuplul crește și, datorită unei scăderi ușoare a turației rotorului, creșterea cuplului are loc mai repede decât puterea utilă pe arbore.
Curentul I1 consumat de motor din rețea variază neuniform odată cu creșterea sarcinii pe arborele motorului. La ralanti, factorul de putere COSφ este mic. Iar curentul are o componentă reactivă mare. La sarcini mici pe arborele motorului, componenta activă a curentului statorului este mai mică decât componenta reactivă, astfel încât componenta activă a curentului are un efect redus asupra curentului I1. La sarcini mari, componenta activă a curentului statorului devine mai mare decât cea reactivă, iar o modificare a sarcinii determină o modificare semnificativă a curentului I1.
Dependența grafică a puterii consumate de motorul P1 este reprezentată ca o linie aproape dreaptă, ușor deviând în sus la sarcini mari, ceea ce se explică printr-o creștere a pierderilor în înfășurările statorului și rotorului odată cu creșterea sarcinii.
Dependența factorului de putere COSφ de sarcina pe arborele motorului este următoarea. La ralanti, СOSφ este mic, aproximativ 0,2. Deoarece componenta activă a curentului statorului, din cauza pierderilor de putere din mașină, este mică în comparație cu componenta reactivă a acestui curent, care creează un flux magnetic. Odată cu creșterea sarcinii pe arbore, СOSφ crește, atingând valoarea maximă de 0,8–0,9, ca urmare a creșterii componentei active a curentului statorului. La sarcini foarte mari, există o scădere ușoară a COSφ, deoarece, ca urmare a creșterii semnificative a alunecării și a frecvenței curentului în rotor, reactanța înfășurării rotorului crește.
Curba randamentului η are aceeași formă ca în orice mașină sau transformator. La ralanti, randament = 0. Odată cu creșterea sarcinii pe arborele motorului, eficiența crește brusc și apoi scade. Cea mai mare valoare Eficiența este atinsă la o astfel de sarcină, atunci când pierderile de putere în oțel și pierderile mecanice, care nu depind de sarcină, sunt egale cu pierderile de putere în înfășurările statorului și rotorului, care depind de sarcină.
Moment electromagnetic
.
Complet putere mecanică motor
este creată ca urmare a rotației rotorului cu o viteză unghiulară ω 2 sub acțiunea momentului M em i.e.
P fur \u003d M em ω 2 (2.19)
Această putere poate fi determinată din circuitul echivalent ca energie electrică, care se evidențiază prin rezistența la sarcină condiționată R bine ", înmulțită cu numărul de faze ale statorului:
P blană = m 1 (I 2 ") 2 R 2 " (1-s) / s (2,20)
Pe baza (2.19) și (2.20), ținând cont de (2.8), putem scrie
M em \u003d (m 1 (I 2 ") 2 R 2 " / s) / ω 1 (2.21)
La calcularea momentului după formula (2.21), curentul eu 2" este determinată de circuitul echivalent (Fig. 2.10) pentru alunecarea corespunzătoare.
Formula (2.21) poate fi transformată prin substituirea în ea a expresiei pentru curent eu 2", obținut în anumite ipoteze din circuitul echivalent
M em \u003d (m 1 U 1 R 2 "/s) / ω 1 ((R 1 + CR 2 / s) 2 + (x 1 + Cx 2 ") 2) (2.22)
Coeficient C, care introduce formula (2.22), este modulul coeficient complex CU
= 1 + (z 1 /z m) care apare în timpul transformării. Ipoteza este de a lua în considerare numai modulul coeficientului CU
, deoarece argumentul său în mașinile reale este foarte mic. În mașini reale (cu excepția micromașinilor) CU
= 1,03–1,08 și la analiza calitativa uneori ia CU
=
1.
Expresia (2.21) poate fi transformată și prin exprimarea căderii de tensiune activă în rotor I 2 "R 2" / s prin EMF bazat pe formulele (2.15) și (2.16)
I 2 "R 2" /s \u003d E 2 "cos ψ 2 (2,23)
Înlocuind (2.23) în (2.21) și efectuând transformări, ținând cont de (2.18) și (2.12), obținem
M em \u003d k F m I 2 "cos ψ 2 (2,24)
Unde k- coeficient constructiv.
După cum se poate observa din (2.24), momentul electromagnetic este direct proporțional cu fluxul magnetic principal F mși componenta activă a curentului rotorului eu 2" cos ψ 2.
Formulele de cuplu (2.21), (2.22) și (2.24) se obțin pentru modul motor, dar sunt valabile și pentru alte moduri, ținând cont de semnul și intervalul valorilor de alunecare. s. Dependența cuplului electromagnetic de alunecare este prezentată grafic în fig. 2.11 (linie continuă).
Acest tip de caracteristică este ușor de explicat folosind formulele (2.24), (2.15) și (2.16). Odată cu alunecarea crescândă, curentul rotorului eu 2 crește continuu, dar devine din ce în ce mai inductiv – scade cos ψ 2 pe măsură ce frecvența curenților din rotor crește și, în consecință, rezistența sa inductivă. Ca urmare, componenta activă a curentului rotorului și, în consecință, cuplul electromagnetic crește mai întâi și apoi încep să scadă.
Alunecarea la care momentul atinge valoarea maximă M max se numește critică și se notează cu scr. Pentru a determina scr, este necesar, folosind expresia (2.22), să luăm derivata dM em /dsși echivalează-l cu zero. Soluția ecuației rezultate are forma
s cr \u003d ±C R 2 " / √ (R 1 " + 2) (2,25)
Luând în prima aproximare C 1 ≈ 1 și R 1 ≈ 0, obținem
s cr = ±R 2 " /(x 1+x2") (2.26)
Majoritatea motoarelor cu inducție necesită eficiență ridicată. Prin urmare, rezistența activă a înfășurărilor, în special R2, care determină nivelul pierderilor electrice în rotor, tinde să fie mică. În acest caz, alunecarea critică se află în intervalul .
Inlocuim (2.25) in (2.22) si obtinem expresia momentului maxim:
M max = ± m 1 U 1 2 /2 ω 1 C [± R 1 + √(R 1 2 +(x 1 + Cx 2) 2)] (2.27)
Semnul „+” se referă la modul motor, „-” - la modul generator.
După cum puteți vedea, momentul maxim este proporțional cu pătratul Tensiunea de alimentare, nu depinde de rezistența activă a circuitului rotorului R2și are loc odată cu alunecarea mai mare, cu atât rezistența activă a circuitului rotorului este mai mare (Fig. 2.11, linie punctată, R2B >R2A).
Cuplul de pornire motor M p se determină prin expresia (2.22) pentru s=1. Sens M p proporţional cu pătratul tensiunii de alimentare şi creşte odată cu creşterea R2(vezi Fig. 2.11), atingând un maxim la s cr =1.
Alunecarea nominală snom, corespunzător cuplului nominal Mnom, crește odată cu creșterea R2. Aceasta este însoțită de o creștere a pierderilor electrice în circuitul rotorului și de o scădere a eficienței. Pentru motoarele asincrone cu alunecare critică scăzută, S nom = 0,02 - 0,06.
Ecuația de echilibru a momentelor pe arborele motorului.
Momentul electromagnetic dezvoltat de motor depășește momentul de sarcină M n aplicat arborelui motor și momentul de rezistență propriu al motorului M 0 (cuplul la ralanti), determinat de pierderile mecanice și suplimentare ale motorului. Momentul rezultat determină valoarea și semnul accelerației rotorului:
dω / dt \u003d (M em - M 0 - M n) / J (2,28)
Unde J- momentul de inerție al pieselor rotative - rotorul și sarcina.
Aceasta este o ecuație diferențială a mișcării unei acționări electrice, constând dintr-un motor și o sarcină, convertită în forma
M em \u003d M 0 + M n + J (dω / dt) (2,29)
numit ecuația de echilibru a momentelor pe arborele motorului.
În această ecuație:
M 0 + M n \u003d M st- moment static de rezistenta,
J(dω/dt)= M dyn este momentul dinamic al rezistenței.
Moment electromagnetic M uh minus moment M0 numit util sau cuplu pe arbore și denotă M2. Din ecuațiile (2.28) și (2.29) rezultă că:
1) dacă M uh = M st, Acea dω/dt = 0, ω
= const i.e. motorul funcționează în regim de echilibru (static), în timp ce M2 = M n;
2) dacă M uh> M st, atunci viteza unghiulară a rotorului crește, adică. motorul funcționează într-un mod tranzitoriu (dinamic);
3) dacă M uh< M st, atunci viteza unghiulară a rotorului scade, adică. motorul funcționează în regim tranzitoriu.
ÎN caz general La compilarea ecuației pentru echilibrul momentelor, ar trebui să țineți cont de semnele momentelor, care sunt determinate de direcția de acțiune a momentelor în raport cu direcția pozitivă de rotație. Dacă motorul generează un cuplu electromagnetic care acționează într-o direcție pozitivă, atunci cuplul este considerat pozitiv ( M uh> 0). Dacă motorul intră în modul de frânare, cuplul său începe să acționeze în direcția opusă ( M uh< 0).
Momentele statice de rezistență create de mecanismul de lucru și dispozitivul de transmisie sunt de două tipuri: reactive și active. Momentele reactive de rezistență sunt întotdeauna îndreptate împotriva sensului de rotație, adică. sunt inhibitori ( M st< 0). К реактивным
моментам относятся моменты сил трения, в том числе в самом двигателе, моменты
сопротивления при резании металла на обрабатывающих станках и т.д. Активный момент
всегда действует в одном и том же направлении, независимо от направления вращения,
т.е. может либо препятствовать движению (M st> 0), sau contribui la aceasta ( M st< 0). К активным
моментам относятся моменты сил тяжести, сил упругости пружин и т.д.
Caracteristici mecanice.
Ecuația caracteristicii mecanice naturale a unui motor cu inducție este expresia (2.21) sau (2.22) cu alunecarea S înlocuită cu viteza unghiulară ω 2 conform (2.8) pentru U 1 = const. Graficul caracteristic este prezentat în fig. 2.12, a.

Fig.2.12
Să evaluăm caracteristica mecanică în termeni de stabilitate, rigiditate și liniaritate.
Se considera ca motorul intr-o actionare deschisa functioneaza stabil daca, dupa inlaturarea perturbatiei, revine automat la punctul initial de functionare pe caracteristica mecanica. Caracteristica mecanică motorul este dependența vitezei unghiulare a rotorului de cuplul electromagnetic: ω 2 \u003d f (M em).Caracteristica mecanică a sarcinii este dependența momentului static de rezistență pe arborele motorului de viteza unghiulară: M st \u003d f (ω 2).
Teoretic, funcționarea în regim de echilibru a motorului este posibilă în anumite puncte A 1Și A 2, Unde M uh=M st.A. Lăsați motorul să funcționeze cu sarcină M st.A \u003d const la punct A 1 si apare o perturbatie, care duce la o crestere a vitezei unghiulare??. Motorul generează apoi un cuplu corespunzător punctului A 1", iar sarcina este momentul de rezistență corespunzător punctului A 1. în care M uh<M st, în conformitate cu ecuația de echilibru a momentului, viteza unghiulară ω 2 scade si motorul revine la punct A 1. Reveniți la punct A 1 va apărea și cu o creștere negativă a vitezei (punctul A 1""). Dacă motorul funcționează cu sarcina la un punct A 2, apoi cu o perturbare care duce la o creștere a vitezei, motorul creează un cuplu corespunzător punctului A 2", iar sarcina este momentul de rezistență corespunzător punctului A 2. în care M uh>M st iar viteza unghiulară continuă să crească, motorul se îndepărtează de punct A 2. Reveniți la punct A 2 nu apare chiar și cu o creștere negativă a vitezei (punctul A 2""). În acest caz, viteza va continua să scadă până când motorul se oprește.
Prin urmare, la punctul A 1 motorul merge constant și la punct A 2- instabil. În cazul general, un semn formal de funcționare stabilă a motorului este inegalitatea
(dM em /dω 2)< (dM ст /dω 2) (2.30)
Cu un moment de încărcare care nu depinde de viteză, adică la M st \u003d contra t, această inegalitate ia forma
(dω 2 /dM em)< 0 (2.31)
Pe baza conceptului de stabilitate a motorului într-o unitate deschisă, se obișnuiește să se numească caracteristica mecanică a motorului stabilă dacă asigură funcționarea stabilă a motorului la M st \u003d const.
Dacă folosim criteriul de stabilitate formală (2.31), atunci este ușor să arătăm că pentru M st \u003d const functionarea stabila a motorului este asigurata numai in zona din ω 1 inainte de ω 2cr. Complot din ω 2cr până la 0 este instabil. Gama de operare a cuplurilor și vitezelor de acţionare electrică cu motoare asincrone este selectată în partea stabilă a caracteristicilor mecanice ale motorului. Punct de sarcină nominal M nom este amplasat pe zona de lucru în așa fel încât capacitatea de suprasarcină K m \u003d M max / M nom \u003d 1,7 -3,5. Cu rezistență scăzută a rotorului R2 viteza critică ω 2cr \u003d (0,8 - 0,9) ω 1 iar zona de lucru este grea. Caracteristica mecanică este în general neliniară, dar zona sa de lucru este aproape de liniară.
În zona de lucru, motorul se autoreglează. Creșterea momentului de rezistență pe arborele motorului din M st.v inainte de M st.s duce la o scădere a vitezei unghiulare a rotorului din ω 2v inainte de ω 2s, o creștere a EMF și a curentului indus în rotor de un câmp rotativ și, în consecință, o creștere a momentului electromagnetic la o valoare egală cu noua valoare a momentului de rezistență (tranziție de la punctul ÎN exact CU asupra caracteristicii mecanice).
Caracteristici de operare
.
Caracteristicile de performanță ale unui motor cu inducție sunt dependențele vitezei unghiulare a rotorului ω 2, moment util M 2, eficienta η
, factor de putere cos φ 1(φ 1- schimbare de fază între U 1Și eu 1) și curentul statoric eu 1 de la puterea utila P2 la U 1 = U nomȘi f1 = f nom(Fig. 2.12, b). Caracteristicile de performanță pot fi luate fie experimental, fie calculate folosind un circuit echivalent.
La trecerea de la x.x. (motorul nu este încărcat) la modul de sarcină nominală, viteza unghiulară a rotorului scade ușor, deoarece ω 2 \u003d (1 - s) ω 1, A S nom, după cum s-a menționat, este unități de procente. În consecință, un moment util M 2 \u003d P 2 / ω 2 crește după o lege apropiată de liniară. Modificarea curentului stator este determinată de răspunsul rotorului; valoarea relativ mare a curentului la ralanti se datorează prezenței unui întrefier. Actualul x.x. preponderent inductiv și, corespunzător, scăzut cos φ 10- aproximativ 0,1 - 0,2. Pe măsură ce sarcina crește, puterea electrică activă consumată crește și cos φ 1 crește - valoarea sa maximă ajunge la 0,7 - 0,9. Curentul păstrează un caracter activ-inductiv ( φ 1>0) iar rețeaua de alimentare este încărcată cu curent reactiv. Eficiența motorului η \u003d R 2 / R 1, Unde R 1- puterea electrică activă consumată de motor. Cu putere simetrică R 1 \u003d m 1 U 1 I 1 cos φ 1, Unde U 1, eu 1– tensiunea și curentul de fază. Dependența eficienței de putere P 2 \u003d P 1 -Δp e -Δp m -Δp blană are acelasi aspect ca si transformatorul, deoarece în motor, pierderile sunt, de asemenea, împărțite în pierderi fixe și variabile. Pentru mașinile de putere mică și medie, valoarea maximă a eficienței η
= 0,7 - 0,9, în timp ce valorile mai mici se referă la motoarele de putere mai mică, care au o rezistență activă relativ mai mare a înfășurărilor.
Vă sfătuim să citiți
 Decor magazin de animale. Afaceri cu magazin de animale de companie. Toate secretele descoperirii sale. Care sunt cele mai bune animale de comercializat
Decor magazin de animale. Afaceri cu magazin de animale de companie. Toate secretele descoperirii sale. Care sunt cele mai bune animale de comercializat Bullying - jocuri pentru fete
Bullying - jocuri pentru fete Lesă de frâu pentru un copil pentru siguranță și pentru a învăța să meargă Lesa de mers pentru copii: ce să cauți
Lesă de frâu pentru un copil pentru siguranță și pentru a învăța să meargă Lesa de mers pentru copii: ce să cauți Afacerea cantinei: de ce ai nevoie pentru a deschide o cantină
Afacerea cantinei: de ce ai nevoie pentru a deschide o cantină

