Pentru cantitatea de cuplu motor de inducție defazajul dintre curentul I 2 şi e are o mare influenţă. d.s. rotor E 2S.
Luați în considerare cazul când inductanța înfășurării rotorului este mică și, prin urmare, defazajul poate fi neglijat (Fig. 223, a).
Câmpul magnetic rotativ al statorului este înlocuit aici de câmpul polilor N și S, rotindu-se, să zicem, în sensul acelor de ceasornic. Folosind regula mâinii drepte, determinăm direcția e. d.s. și curenții din înfășurarea rotorului. Curenții rotorului, interacționând cu câmpul magnetic rotativ, creează un cuplu. Direcțiile forțelor care acționează asupra conductoarelor purtătoare de curent sunt determinate de regula stângii. După cum se poate observa din desen, rotorul sub acțiunea forțelor se va roti în aceeași direcție cu câmpul de rotație în sine, adică în sensul acelor de ceasornic.
Luați în considerare al doilea caz, când inductanța înfășurării rotorului este mare. În acest caz, defazarea dintre curentul rotor I 2 și e. d.s. rotorul E 2S va fi de asemenea mare. în fig. 223, b, câmpul magnetic al statorului unui motor cu inducție este încă prezentat sub forma unor poli rotativi în sensul acelor de ceasornic N și S. Direcția lui e. d.s. rămâne la fel ca în fig. 223, a, dar din cauza întârzierii curentului în fază, axa camp magnetic rotorul nu va mai coincide cu linia neutră a câmpului statorului, ci se va deplasa cu un anumit unghi împotriva rotației câmpului magnetic. Acest lucru va duce la faptul că, odată cu formarea unui cuplu direcționat într-o direcție, unii conductori vor crea un cuplu opus.
Din aceasta se poate observa că cuplul total al motorului în timpul unei defazări între curent și e. d.s. rotorul este mai mic decât în cazul în care I 2 și E 2S sunt în fază. Se poate dovedi că cuplul unui motor cu inducție este determinat doar de componenta activă a curentului rotorului, adică curentul I 2 cos și că poate fi calculat prin formula:
Ф m - fluxul magnetic al statorului (și, de asemenea, aproximativ egal cu fluxul magnetic rezultat al motorului cu inducție);
Unghiul de fază între e. d.s. și curentul de fază de înfășurare
C este un coeficient constant.
După înlocuire:
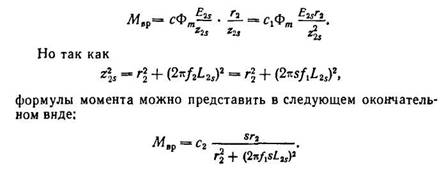
Din ultima expresie se poate observa că cuplul motorului cu inducție depinde de alunecare.
în fig. 224 prezintă curba A a cuplului motorului în funcție de alunecare. Din curba se poate observa ca in momentul pornirii, cand s=l si n = 0, cuplul motorului este mic. Acest lucru se explică prin faptul că, în momentul pornirii, frecvența curentului în înfășurarea rotorului este cea mai mare, iar rezistența inductivă a înfășurării este mare. Ca rezultat, cos are o valoare mică (pentru că
|
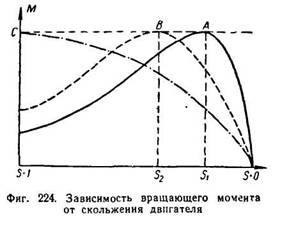
rândul 0,1-0,2). Prin urmare, deși curentul de pornire este mare, cuplul de pornire va fi mic.
Cu o anumită alunecare S 1, cuplul motorului va avea o valoare maximă. Cu o scădere suplimentară a alunecării sau, cu alte cuvinte, cu o creștere suplimentară a vitezei de rotație a motorului, cuplul acestuia va scădea rapid.
Pentru eșalonare și la alunecarea s = 0, cuplul motorului va fi, de asemenea, egal cu zero.
Trebuie remarcat faptul că într-un motor asincron, o alunecare egală cu zero nu poate exista practic. Acest lucru este posibil numai dacă rotorul este alimentat extern cu un cuplu în sensul de rotație al câmpului statorului.
Cuplul de pornire poate fi mărită dacă, în momentul pornirii, defazajul între curent și e. d.s. rotor. Din formula
se poate observa că dacă la o constantă reactanța inductivăînfășurările rotorului pentru a crește rezistența activă, apoi unghiul în sine va scădea, ceea ce va duce la faptul că și cuplul motorului va crește. Acesta este utilizat în practică pentru a crește cuplul de pornire al motorului. În momentul pornirii, în circuitul rotorului este introdusă o rezistență activă (reostat de pornire), care este apoi îndepărtată de îndată ce motorul crește turația.
Creşterea cuplului de pornire face ca cuplul maxim al motorului să fie obţinut cu mai multă alunecare (punctul S2 al curbei B din FIG. 224). Prin creșterea rezistenței active a circuitului rotor la pornire, se poate realiza ca cuplul maxim să fie în momentul pornirii (s = 1 curba C).
Cuplul unui motor cu inducție este proporțional cu pătratul tensiunii, astfel încât chiar și o mică scădere a tensiunii este însoțită de o scădere bruscă a cuplului.
Puterea P 1 furnizată înfășurării statorului a unui motor cu inducție este egală cu:
![]()
unde m 1 este numărul de faze.
Statorul motorului are următoarele pierderi de energie:
1) în înfăşurarea statorului R es. =m 1 I 1 2 r 1 ;
2) în oțelul statorului și histerezis și curenți turbionari P C .
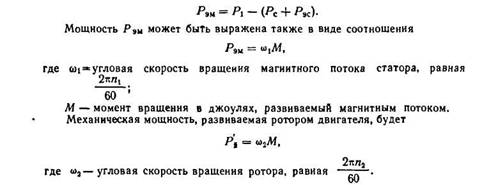
Puterea furnizată rotorului este puterea câmpului magnetic rotativ, numită și puterea electromagnetică P eM .
Puterea electromagnetică este egală cu diferența dintre puterea furnizată motorului și pierderile din statorul motorului, adică.
|
Diferența dintre Р eM și reprezintă pierderile electrice în înfășurarea rotorului Р eP, dacă neglijăm pierderile din oțelul rotorului din cauza nesemnificației lor (frecvența de remagnetizare a rotorului este de obicei foarte mică):
Prin urmare, pierderile în înfășurarea rotorului sunt proporționale cu alunecarea rotorului.
Dacă de la putere mecanică dezvoltate de rotor, se scad pierderile mecanice R mx datorate frecării în lagărele rotorului, frecării pe aer etc., precum și pierderile suplimentare R D apărute sub sarcină și din cauza câmpurilor parazite ale rotorului, precum și pierderile cauzate de: pulsațiile câmpului magnetic. în dinții statorului și rotor, atunci va exista putere utilă pe arborele motorului, pe care îl notăm cu P 2 .
Eficiența unui motor cu inducție poate fi determinată prin formula:

Din ultima expresie se poate observa că momentul de rotație al unui motor cu inducție este proporțional cu produsul dintre mărimea fluxului magnetic rotativ, curentul rotorului și cosinusul unghiului dintre e. d.s. rotorul și curentul său,

Din circuitul echivalent al unui motor asincron se obține valoarea curentului redus al rotorului, pe care o dăm fără dovadă.
Momentul dezvoltat de motor este egal cu puterea electromagnetică împărțită la viteza de rotație sincronă a acționării electrice.
M \u003d P em / ω 0
Puterea electromagnetică este puterea transmisă prin spațiul de aer de la stator la rotor și este egală cu pierderile din rotor, care sunt determinate de formula:
P em \u003d m I 2 2 (r 2 '/s)
m este numărul de faze.
M \u003d M em \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s)
Caracteristica electromecanica a unui motor asincron este dependenta lui I2' de alunecare. Dar de atunci mașină asincronă funcționează doar ca motor electric, principala caracteristică este caracteristica mecanică.
M \u003d Me m \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s) - o expresie simplificată a caracteristicii mecanice.
Înlocuind valoarea curentă în această expresie, obținem: M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
În loc de ω 0, trebuie să înlocuiți viteza mecanică, drept urmare numărul de perechi de poli este redus.
M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] este ecuația pentru caracteristica mecanică a unui motor cu inducție.
Când motorul cu inducție intră în modul generator, viteza de rotație ω > ω 0 și alunecarea devine negativă (s Când alunecarea se schimbă de la 0 la +∞, modul se numește „mod frână electromagnetică".
Având în vedere valorile alunecării de la o la +∞, obținem caracteristica:
Caracteristica mecanică completă a unui motor asincron.
După cum se poate observa din caracteristica mecanică, are două extreme: una în segmentul de modificare a alunecării în zona de la 0 la +∞, cealaltă în segmentul de la 0 la -∞. dM/ds=0
M max = / ] + se referă la modul motor. - se referă la modul generator.
M max \u003d M cr M cr - moment critic.
Alunecarea la care momentul atinge maximul se numește alunecare critică și este determinată de formula: s cr = ±
Alunecarea critică are aceeași valoare atât în modul motor, cât și în modul generator.
Valoarea lui M cr poate fi obținută prin înlocuirea valorii alunecării critice în formula momentului.
Momentul în care alunecarea este egală cu 1 se numește cuplu de pornire. Expresia cuplului de pornire poate fi obținută prin înlocuirea cu 1 în formula:
M p \u003d / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
Deoarece numitorul din formula pentru momentul maxim este cu câteva ordine de mărime mai mare decât U f, se obișnuiește să se considere M kr ≡U f 2 .
Alunecarea critică depinde de valoarea rezistenței active a înfășurării rotorului R2'. Cuplul de pornire, după cum se poate vedea din formulă, depinde de rezistența activă a rotorului r2’. această proprietate a cuplului de pornire este utilizată la motoarele asincrone cu rotor de fază, în care cuplul de pornire este mărit prin introducerea rezistenței active în circuitul rotorului.
7. Transformator de mers în gol
Modul inactiv al transformatorului se numește modul de funcționare atunci când una dintre înfășurările transformatorului este alimentată de la o sursă cu tensiune alternativă și cu circuite deschise ale altor înfășurări. Acest mod de funcționare poate fi într-un transformator real atunci când este conectat la rețea, iar sarcina alimentată de la înfășurarea sa secundară nu este încă pornită. De înfăşurare primară transformatorul trece curentul I 0 , în același timp în timpul înfăşurare secundară nu există curent, deoarece circuitul este deschis. Curentul I 0 , care trece prin înfășurarea primară, creează în circuitul magnetic o tavă cu schimbare sinusoidală Ф 0, care, din cauza pierderilor magnetice, rămâne în urma curentului în fază cu un unghi de pierdere δ. 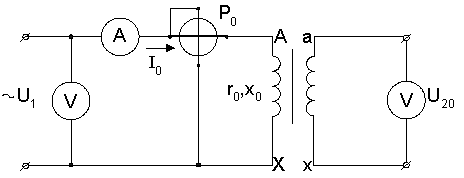
Mărimea cuplului unui motor cu inducție este foarte influențată de defazarea dintre curentul I 2 și e. d.s. rotor E 2S.
Luați în considerare cazul când inductanța înfășurării rotorului este mică și, prin urmare, defazajul poate fi neglijat (Fig. 223, a).
Câmpul magnetic rotativ al statorului este înlocuit aici de câmpul polilor N și S, rotindu-se, să zicem, în sensul acelor de ceasornic. Folosind regula mâinii drepte, determinăm direcția e. d.s. și curenții din înfășurarea rotorului. Curenții rotorului, interacționând cu câmpul magnetic rotativ, creează un cuplu. Direcțiile forțelor care acționează asupra conductoarelor purtătoare de curent sunt determinate de regula stângii. După cum se poate observa din desen, rotorul sub acțiunea forțelor se va roti în aceeași direcție cu câmpul de rotație în sine, adică în sensul acelor de ceasornic.
Luați în considerare al doilea caz, când inductanța înfășurării rotorului este mare. În acest caz, defazarea dintre curentul rotor I 2 și e. d.s. rotorul E 2S va fi de asemenea mare. în fig. 223, b, câmpul magnetic al statorului unui motor cu inducție este încă prezentat sub forma unor poli rotativi în sensul acelor de ceasornic N și S. Direcția lui e. d.s. rămâne la fel ca în fig. 223, a, dar din cauza întârzierii de fază a curentului, axa câmpului magnetic al rotorului nu va mai coincide cu linia neutră a câmpului statorului, ci se va deplasa cu un anumit unghi împotriva rotației câmpului magnetic. Acest lucru va duce la faptul că, odată cu formarea unui cuplu direcționat într-o direcție, unii conductori vor crea un cuplu opus.
Din aceasta se poate observa că cuplul total al motorului în timpul unei defazări între curent și e. d.s. rotorul este mai mic decât în cazul în care I 2 și E 2S sunt în fază. Se poate dovedi că cuplul unui motor cu inducție este determinat doar de componenta activă a curentului rotorului, adică curentul I 2 cos și că poate fi calculat prin formula:
Ф m - fluxul magnetic al statorului (și, de asemenea, aproximativ egal cu fluxul magnetic rezultat al motorului cu inducție);
Unghiul de fază între e. d.s. și curentul de fază de înfășurare
C este un coeficient constant.
După înlocuire:
Din ultima expresie se poate observa că cuplul motorului cu inducție depinde de alunecare.
în fig. 224 prezintă curba A a cuplului motorului în funcție de alunecare. Din curba se poate observa ca in momentul pornirii, cand s=l si n = 0, cuplul motorului este mic. Acest lucru se explică prin faptul că, în momentul pornirii, frecvența curentului în înfășurarea rotorului este cea mai mare, iar rezistența inductivă a înfășurării este mare. Ca rezultat, cos are o valoare mică (pentru că
|
rândul 0,1-0,2). Prin urmare, deși curentul de pornire este mare, cuplul de pornire va fi mic.
Cu o anumită alunecare S 1, cuplul motorului va avea o valoare maximă. Cu o scădere suplimentară a alunecării sau, cu alte cuvinte, cu o creștere suplimentară a vitezei de rotație a motorului, cuplul acestuia va scădea rapid.
Pentru eșalonare și la alunecarea s = 0, cuplul motorului va fi, de asemenea, egal cu zero.
Trebuie remarcat faptul că într-un motor asincron, o alunecare egală cu zero nu poate exista practic. Acest lucru este posibil numai dacă rotorul este alimentat extern cu un cuplu în sensul de rotație al câmpului statorului.
Cuplul de pornire poate fi mărit dacă, în momentul pornirii, defazajul dintre curent și e este redus. d.s. rotor. Din formula
se poate observa că dacă, cu o rezistență inductivă constantă a înfășurării rotorului, rezistența activă este crescută, atunci unghiul în sine va scădea, ceea ce va duce la faptul că și cuplul motorului va crește. Acesta este utilizat în practică pentru a crește cuplul de pornire al motorului. În momentul pornirii, în circuitul rotorului este introdusă o rezistență activă (reostat de pornire), care este apoi îndepărtată de îndată ce motorul crește turația.
Creşterea cuplului de pornire face ca cuplul maxim al motorului să fie obţinut cu mai multă alunecare (punctul S2 al curbei B din FIG. 224). Prin creșterea rezistenței active a circuitului rotor la pornire, se poate realiza ca cuplul maxim să fie în momentul pornirii (s = 1 curba C).
Cuplul unui motor cu inducție este proporțional cu pătratul tensiunii, astfel încât chiar și o mică scădere a tensiunii este însoțită de o scădere bruscă a cuplului.
Puterea P 1 furnizată înfășurării statorului a unui motor cu inducție este egală cu:
![]()
unde m 1 este numărul de faze.
Statorul motorului are următoarele pierderi de energie:
1) în înfăşurarea statorului R es. =m 1 I 1 2 r 1 ;
2) în oțelul statorului și histerezis și curenți turbionari P C .
Puterea furnizată rotorului este puterea câmpului magnetic rotativ, numită și puterea electromagnetică P eM .
Puterea electromagnetică este egală cu diferența dintre puterea furnizată motorului și pierderile din statorul motorului, adică.
|
Diferența dintre Р eM și reprezintă pierderile electrice în înfășurarea rotorului Р eP, dacă neglijăm pierderile din oțelul rotorului din cauza nesemnificației lor (frecvența de remagnetizare a rotorului este de obicei foarte mică):
Prin urmare, pierderile în înfășurarea rotorului sunt proporționale cu alunecarea rotorului.
Dacă din puterea mecanică dezvoltată de rotor se scad pierderile mecanice R mx datorate frecării în lagărele rotorului, frecării pe aer etc., precum și pierderile suplimentare R D apărute sub sarcină și din cauza câmpurilor parazite ale rotorului, precum și pierderile cauzate. după câmp în dinții statorului și rotorului, atunci va exista putere utilă pe arborele motorului, pe care îl notăm cu P 2.
Eficiența unui motor cu inducție poate fi determinată prin formula:
Din ultima expresie se poate observa că momentul de rotație al unui motor cu inducție este proporțional cu produsul dintre mărimea fluxului magnetic rotativ, curentul rotorului și cosinusul unghiului dintre e. d.s. rotorul și curentul său,
Din circuitul echivalent al unui motor asincron se obține valoarea curentului redus al rotorului, pe care o dăm fără dovadă.
Vă sfătuim să citiți
 Efect terapeutic Pentru ce se utilizează vitamina e?
Efect terapeutic Pentru ce se utilizează vitamina e? - instrucțiuni de utilizare Dexalgin cum să ia") Dexalgin (fiole cu dexketoprofen) - instrucțiuni de utilizare Dexalgin cum să ia
Dexalgin (fiole cu dexketoprofen) - instrucțiuni de utilizare Dexalgin cum să ia Soluție Diclak - instrucțiuni de utilizare Diclofenac injecții instrucțiuni de utilizare pentru copii
Soluție Diclak - instrucțiuni de utilizare Diclofenac injecții instrucțiuni de utilizare pentru copii Interpretarea viselor: de ce visezi focul, pentru a vedea focul într-un vis, ceea ce înseamnă De ce visezi focul într-o oglindă
Interpretarea viselor: de ce visezi focul, pentru a vedea focul într-un vis, ceea ce înseamnă De ce visezi focul într-o oglindă

