Pentru toată lumea motor de inducție poate fi definit modul nominal, adică modul de funcționare pe termen lung, în care motorul nu se supraîncălzi peste temperatura setată. Se numește momentul M cotat, corespunzător modului nominal. moment nominal. Alunecarea nominală corespunzătoare pentru motoarele asincrone de putere medie este s H0M = 0,02 ... 0,06, i.e. viteza nominală n și ohm este în
n nom = n 0 (1 - s 0) \u003d (0,94 ... 0,98) p 0
Raportul dintre cuplul maxim și nominal la m = = Mmax / M nom se numește capacitatea de suprasarcină a motorului asincron. De obicei, k m \u003d 1,8 ... .2,5.
La pornire, adică la pornire și în timpul accelerației, motorul asincron se află în condiții care sunt semnificativ diferite de condițiile de funcționare normală. Cuplul dezvoltat de motor trebuie să depășească momentul de rezistență al sarcinii, altfel motorul nu va putea accelera. Astfel, din punct de vedere al pornirii motorului, cuplul acestuia de pornire joaca un rol important.
Raportul dintre cuplul de pornire M p dezvoltat de motor într-o stare staționară, adică la n \u003d 0, și cuplul nominal k p \u003d M p / M nom se numește multiplicitatea cuplului de pornire.
Momentul maxim M max se numește momentul critic al mașinii asincrone. Funcționarea mașinii cu un cuplu care depășește cel nominal este posibilă doar pentru o perioadă scurtă de timp, altfel durata de viață a mașinii este redusă din cauza supraîncălzirii acesteia.
Ca urmare a interacțiunii unui flux magnetic rotativ cu curenții induși de acesta în conductoarele înfășurării rotorului iau naștere forțe care acționează asupra acestor conductori în sens tangenţial. Să aflăm valoarea momentului creat de aceste forțe pe arborele mașinii.
Puterea electromagnetică transmisă rotorului de câmpul magnetic rotativ este egală cu:
unde M uh - moment electromagnetic care actioneaza asupra rotorului.
Conform circuitului echivalent al unei faze a mașinii:
Din aceste expresii găsim:
Având în vedere curentul curent al rotorului, EMF, reactanța inductivă primim:
Introducem o constantă și neglijând momentul de frecare, reprezentăm expresia momentului pe arbore sub forma:
Dacă fluxul magnetic Ф este exprimat în weberi, curentul I 2 - în amperi, atunci cuplul va fi în newtoni metri (Nm).
Cuplul mașinii depinde de sarcina f, I 2 și , dar poate fi reprezentat ca o funcție a unei variabile. Ca o astfel de variabilă pentru un motor cu inducție, este cel mai convenabil să alegeți alunecarea s.
Conform formulelor studiate anterior:
Presupunând că frecvența rețelei este neschimbată, introducem
36. Metode de reglare a vitezei de rotație iad cu scurtcircuit. rotor
37.Porniți și controlați viteza de rotație a tensiunii arteriale cu f.r.
Reglarea prin schimbarea alunecării se realizează prin modificarea rezistenței R p a reostatului de reglare din circuitul rotorului.
Introducerea unui reostat în circuitul rotorului modifică dependența cuplului M de alunecare fără a afecta mărimea cuplului maxim. Trei caracteristici M(e): caracteristica naturală (non-reostat) 1 corespunde unei înfășurări de rotor în scurtcircuit (rezistența reostatului = 0), caracteristicile reostatice (artificiale) 2 și 3 corespund treptei introduse una și două ale reostatului.
Introducerea unui reostat în circuitul rotorului are un efect pozitiv asupra curentului de pornire, reducându-l de aproximativ 2 ori în comparație cu un IM scurtcircuitat.
Dezavantajele acestei metode: 1) randament scăzut din cauza pierderilor în reostat R p ; 2) reducerea rigidității caracteristicilor mecanice; 3) viteza poate fi reglată doar în jos.
Pornirea unui motor asincron cu un rotor de fază. Pornirea motoarelor asincrone diferă semnificativ de condițiile de funcționare normală. Cuplul motorului la pornire trebuie să depășească cuplul de rezistență la sarcină, cuplul de pornire joacă un rol important. A doua caracteristică importantă de pornire este curentul de pornire. Raportul curentului de pornire pentru motoarele cu rotor cu colivie ajunge la 5-7, ceea ce poate fi inacceptabil pentru motor sau pentru rețea și poate face o diferență în netezimea pornirii. Pornirea unui motor cu rotor de fază se realizează printr-un reostat trifazat, fiecare fază fiind conectată prin perii și inele la una dintre fazele rotorului. La începutul pornirii, reostatul este introdus complet, la sfârșitul pornirii este scos și toate cele trei faze ale rotorului sunt scurtcircuitate. Numărul de pași reostat este considerat a fi mai mare de doi, iar procesul de comutare la pornire este de obicei automatizat. Introducerea rezistențelor active în circuitul rotorului de fază crește cuplul și face pornirea lină și limitează curentul de pornire. Această metodă de pornire are o serie de avantaje, dar este aplicabilă numai pentru motoarele cu rotor de fază.
39.40. Dispozitiv, principiu de funcționare a motorului curent continuu. Metode de excitare. EMF al înfășurării armăturii și cuplul electromagnetic Proiectarea și principiul de funcționare a unui motor de curent continuu Un motor de curent continuu este format dintr-o parte fixă - statorul și o parte rotativă - armătura, separate printr-un spațiu de aer. Principalii poli suplimentari sunt atașați de suprafața interioară a statorului. Polii principali cu înfășurări de excitație servesc la crearea fluxului magnetic principal F în mașină, iar cei suplimentari la reducerea scânteilor.
Armătura este formată dintr-un arbore, un miez, o înfășurare și un colector. Colectorul conține plăci de cupru izolate unele de altele, care sunt conectate la secțiunile înfășurării armăturii. Perii fixe sunt suprapuse pe colector; conectarea înfăşurării armăturii cu un circuit electric extern. Ca rezultat al interacțiunii dintre curentul de armătură Iya și fluxul magnetic Ф, se creează un cuplu, M = CmFIa, unde Cm este constanta momentului, care depinde de datele de proiectare ale mașinii. Cuplul M al motorului este echilibrat de momentul de rezistență Ms al mașinii de lucru. Când armătura se rotește cu o frecvență n, înfășurarea sa traversează fluxul magnetic Ф și în ea, conform legii inducției electromagnetice, este indusă o contra-EMF E \u003d CeFp, unde Ce este o constantă constructivă.
Tensiunea la armătura ezhimax U este egală cu suma EMF și căderea de tensiune pe rezistența circuitului de ancorare U=E +RyaIya=CeFn, de unde curentul armăturii Ia=(U-CeFn)/Rya și viteza n=(U-RyaIya)/CeF/
În funcție de metoda de alimentare a înfășurării de excitație, generatoarele de curent continuu sunt:
| a B C D) |
Orez. 50. Excitația generatorului: a - independent, b - paralel, c - serial, d - mixt.
La excitare independentă OB este alimentat de o sursă externă. Este utilizat în cazurile în care este necesară reglarea curentului de excitație I în și a tensiunii U la clemele mașinii pe o gamă largă. Curentul armăturii este egal cu curentul de sarcină I I \u003d I n (Fig. 50, a)
Generatoarele auto-excitate au OB alimentate de generatorul însuși.
Când OB este pornit în paralel cu înfășurarea armăturii, avem un generator cu excitație paralelă(Fig. 50, b), în care I \u003d I n + I c. Pentru mașinile puternice de execuție normală, I in este de obicei 1-3%, iar pentru mașinile mici - până la câteva zeci de% din curentul armăturii. La generatorul cu excitaţie secvenţială(Fig. 50, c) ORP este conectat în serie cu ancora, adică.
I i \u003d I n \u003d I c.
Generatoarele cu excitație mixtă au două înfășurări de excitație, OB este conectat în paralel cu armătura, iar celălalt ORP este în serie (Fig. 50, d). Principalul este de obicei OB. ORP magnetizează mașina cu o creștere a curentului de sarcină, care compensează căderea de tensiune U în înfășurarea armăturii și efectul de demagnetizare al reacției armăturii.
Tensiunea U 1 aplicată fazei înfășurării statorului este echilibrată de EMF principal E 1, EMF de scurgere și căderea de tensiune pe rezistența activă a înfășurării statorului:
Într-o înfășurare a rotorului, o ecuație similară va arăta astfel:
Dar, deoarece înfășurarea rotorului este închisă, tensiunea U 2 \u003d 0 și dacă luăm în considerare și faptul că E 2s \u003d SE 2 și x 2s \u003d Sx 2, atunci ecuația poate fi rescrisă ca:
![]()
Ecuația pentru curenții unui motor cu inducție repetă o ecuație similară pentru un transformator:
28 Cuplu motor asincron
Cuplul într-un motor cu inducție este creat prin interacțiunea curentului rotorului cu câmpul magnetic al mașinii. Cuplul poate fi exprimat matematic în termeni de putere electromagnetică a mașinii:
Unde w 1 =2pn 1 /60 - frecvența unghiulară de rotație a câmpului. La randul lui, n 1 =f 1 60/R, apoi
![]()
Înlocuiți în formulă M 1 expresie REm=Pe2/Sși, împărțind la 9,81, obținem:
![]()
Ecuația cuplului motorului cu inducție
Rezultă că cuplul motorului este proporțional cu pierderile electrice din rotor. Înlocuiți în ultima formulă valoarea curentă eu 2 ’ :
obținem ecuația pentru cuplul unui motor cu inducție:
Unde U 1 - tensiunea de fază a înfăşurării statorului.
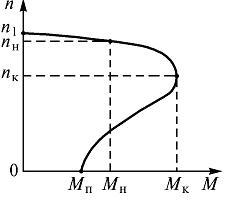
29 .Caracteristica mecanică a motorului se numește dependența turației rotorului de cuplul de pe arbore n = f (M2). Deoarece cuplul în gol este mic sub sarcină, atunci M2 ≈ M și caracteristica mecanica este reprezentată de dependența n = f (M). Dacă luăm în considerare relația s = (n1 - n) / n1, atunci caracteristica mecanică poate fi obținută prezentând dependența sa grafică în coordonatele n și M (Fig. 1).
Orez. 1. Caracteristica mecanică a motorului asincron
Caracteristica mecanică naturală a unui motor cu inducție corespunde circuitului principal (pașaport) al includerii acestuia și parametrilor nominali ai tensiunii de alimentare. Caracteristici artificiale se obțin dacă sunt incluse elemente suplimentare: rezistențe, reactoare, condensatoare. Atunci când motorul este alimentat cu o tensiune nenominală, caracteristicile diferă de asemenea de caracteristica mecanică naturală.
Caracteristicile mecanice sunt foarte convenabile și unealtă folositoareîn analiza modurilor statice şi dinamice ale acţionării electrice.
30 Caracteristică mecanică și autoreglare motorie. Graficul care leagă mărimile mecanice - turația și cuplul - se numește caracteristica mecanică a unui motor cu inducție (Fig. 7) n = ƒ(M). Auto-reglarea unui motor asincron este după cum urmează. Lăsați motorul să funcționeze constant într-un anumit mod, dezvoltând viteza n1 și cuplul M1. Cu o rotație uniformă, acest moment este egal cu cuplul de frânare M t1, adică M1=M t 1, n1= conset. Creșterea cuplului de frânare la M2 va determina o scădere a vitezei mașinii, deoarece cuplul de frânare va deveni mai mare decât cuplul. Odată cu scăderea vitezei, alunecarea crește, ceea ce determină, la rândul său, o creștere a EMF și a curentului în rotor. Aceasta crește cuplul motorului. Acest proces se termină atunci când cuplul M2 dezvoltat de motor devine egal cu M t 2. În acest caz, viteza de rotație este setată mai mică decât n1. Proprietatea echilibrului automat între frânare și cuplu se numește autoreglare.
Pe un stand de laborator, motorul este încărcat cu o frână electrică, constând dintr-un electromagnet, în golul căruia se rotește un disc, plantat pe arborele motorului. Prin schimbarea tensiunii care alimentează bobina electromagnetului cu mânerul autotransformatorului, este posibilă modificarea forței de frânare, al cărei moment este: M TORM \u003d F r (N m)
unde F este forța (forța) care acționează asupra circumferinței scripetelui, (N);
r - raza scripetelui, egală cu 0,18 m. Putere utilă pe arborele motorului:
Unde n- viteza de rotatie a motorului, rpm.
unde ƒ - frecvența rețelei (egal cu 50 Hz),
R- numărul de perechi de poli ai înfăşurării statorului (egal cu 2).
n 1 - viteza sincronă a rotaţiei camp magnetic.
Turația motorului este determinată cu ajutorul unui turometru. Alunecarea se calculează cu formula:
31 Caracteristici de operare numit dependențe de putere, consumat de motor, curent consumat I, factor de putere, turație motor, randament și cuplu M din puterea utilă a motorului dată arborelui. Caracteristicile de performanță determină proprietățile de bază de performanță ale unui motor cu inducție. Caracteristicile de performanță ale unui motor cu inducție de putere medie sunt prezentate în fig. 8.8. Comportamentul lor este explicat după cum urmează. La sarcini ușoare, curentul motorului I (curent fără sarcină) poate fi între 20% și 70% din curentul nominal. Pe măsură ce sarcina crește, curentul din circuitul rotorului crește, ceea ce duce la o creștere aproape proporțională a curentului euîn circuitul statorului.

Fig.8.8 Cuplu motor () este, de asemenea, aproape proporțională cu sarcina, dar la sarcini mari, liniaritatea graficului este oarecum încălcată prin reducerea turației motorului. Caracteristica de performanță exprimă relația dintre puterea dezvoltată de motor și defazajul dintre curentul și tensiunea statorului. Un motor asincron, ca un transformator, consumă un curent I din rețea, care este semnificativ defazat cu tensiunea aplicată. De exemplu, în modul inactiv. Odată cu creșterea sarcinii pe arborele motorului, componentele active ale curenților rotorului și statorului cresc, crescând . Valoarea maximă este atinsă la .
Cu o creștere suplimentară, valoarea va scădea ușor. Acest lucru se datorează unei creșteri a alunecării, care determină o creștere a reactanței înfășurării rotorului și, în consecință, defazarea . DIN crește și crește, adică. va scadea.
Comportament caracteristica de functionare se explică după cum urmează. Valoarea eficienței este determinată de raportul dintre puterea utilă și puterea consumată din rețea.
Valoarea se numește pierdere de putere. Pe lângă pierderile din oțelul statorului și rotorului datorate inversării magnetizării și curenților turbionari, care, împreună cu pierderile mecanice, pot fi considerate constante, există pierderi în cupru la un motor asincron. ,
acestea. în înfășurările statorului și rotorului, care sunt proporționale cu pătratul curentului care curge și, prin urmare, depind de sarcină. În timpul mersului în gol, ca într-un transformator, predomină pierderile în oțel, deoarece și este egal cu curentul fără sarcină, care este mic. Cu sarcini mici pe arbore, pierderile în cupru rămân în continuare mici și, prin urmare, eficiența determinată de formulă ![]() (8.5)
(8.5)
crește brusc la început. Când pierderile fixe devin egale cu pierderile dependente de sarcină , eficienţă atinge valoarea maximă. Odată cu o creștere suplimentară a sarcinii, pierderile de putere variabile cresc semnificativ, drept urmare eficiența scade vizibil. Natura dependenței ) poate fi explicată din relație . Dacă eficienţa a fost constantă, atunci ar exista o relație liniară între și. Dar din moment ce eficienta depinde de și această dependență crește inițial brusc, iar cu o creștere suplimentară a sarcinii se modifică ușor, apoi curba ) mai întâi crește încet, apoi crește brusc.
32 La orice circuit electric suma puterilor tuturor surselor de energie electrică trebuie să fie egală cu suma puterilor tuturor receptoarelor și elementelor auxiliare. După ce au obținut anterior expresiile puterii, este posibil să scrieți într-o formă generală ecuația de echilibru a puterii pentru orice circuit electric:
Σ E → eu → + Σ U ← eu → = Σ E ← eu → + Σ U → eu → + Σ eu 2 r.
Ecuația (1.35) poate fi scrisă atât pentru direcțiile, tensiunile și curenții CEM reale, cât și pentru cazul în care unele dintre ele sunt direcții pozitive alese în mod arbitrar. În primul caz, toți termenii din acesta vor fi pozitivi și elementele corespunzătoare ale circuitului vor fi de fapt surse sau receptori de energie electrică. Dacă, pe de altă parte, unii termeni sunt scrisi cu privire la direcții pozitive alese în mod arbitrar, elementele corespunzătoare trebuie considerate surse și receptori intenționați. Ca rezultat al calculului sau analizei, unele dintre ele se pot dovedi negative. Aceasta va însemna că unele dintre presupusele surse sunt de fapt o chiuvetă, iar unele dintre presupusele chiuvete sunt o sursă.
33 Pornirea unui motor asincron este însoțită de un proces tranzitoriu al mașinii asociat cu trecerea rotorului de la o stare de repaus la o stare de rotație uniformă, în care cuplul motor echilibrează momentul forțelor de rezistență asupra arborelui mașinii. La pornirea unui motor asincron are loc un consum crescut de energie electrică din rețeaua de alimentare, care este cheltuită nu numai pentru depășirea cuplului de frânare aplicat arborelui și acoperirea pierderilor în motorul asincron în sine, ci și pentru comunicarea unei anumite energii cinetice. la piesele mobile ale unitatii de productie. Prin urmare, la pornire, un motor asincron trebuie să dezvolte un cuplu crescut. Pentru motor asincron cu rotor de fază cuplul inițial de pornire, corespunzător alunecării sp = 1, depinde de rezistențele active ale rezistențelor reglabile introduse în circuitul rotoric.
Orez. 1. Pornirea unui motor asincron trifazat cu un rotor de fază: a - grafice ale dependenței cuplului motorului cu un rotor de fază pe alunecare la diferite rezistențe active ale rezistențelor din circuitul rotorului, b - diagrama includerii rezistențe și contacte de închidere de accelerație în circuitul rotorului. Deci, cu contactele de accelerație închise U1, U2, adică la pornirea unui motor asincron cu inele de contact scurtcircuitate, cuplul inițial de pornire Mp1 = (0,5 -1,0) Mnom și curentul inițial de pornire Ip = (4,5 - 7) Inom și Mai Mult. Cuplu de pornire mic motor electric asincron cu un rotor bobinat poate să nu fie suficient pentru a conduce unitatea de producție și apoi pentru a o accelera, iar un curent de pornire semnificativ va provoca o încălzire crescută înfășurări ale motorului, care limitează frecvența pornirii sale, iar în rețelele de putere redusă duce la o cădere temporară de tensiune care este nedorită pentru funcționarea altor receptoare. Aceste circumstanțe pot fi motivul care exclude utilizarea motoarelor asincrone cu un rotor de fază cu un curent mare de pornire pentru a conduce mecanismele de lucru. Introducerea rezistențelor reglabile, numite rezistențe de pornire, în circuitul rotorului motorului nu numai că reduce curentul inițial de pornire, dar în același timp crește cuplul inițial de pornire, care poate atinge cuplul maxim Mmax (Fig. 1, a, curba 3). ), dacă alunecarea critică a motorului cu un rotor de fază este sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, unde Rd" este rezistența activă a rezistorului situat în faza de înfăşurarea rotorului motorului, redusă la faza înfăşurării statorului. O creștere suplimentară a rezistenței active a rezistenței de pornire este nepractică, deoarece duce la o slăbire a cuplului inițial de pornire și la ieșirea punctului de cuplu maxim în regiunea de alunecare s > 1, ceea ce exclude posibilitatea de accelerare a rotorului. Rezistența activă necesară a rezistențelor pentru pornirea unui motor cu un rotor de fază este determinată pe baza cerințelor de pornire, care poate fi ușor atunci când Mp = (0,1 - 0,4) Mnom, normal dacă Mp - (0,5 - 0,75) Mnom, și grele la Mp ≥ Mnom. Pentru a menține un cuplu suficient de mare de către motorul cu un rotor de fază în timpul accelerării unității de producție pentru a reduce durata procesului tranzitoriu și a reduce încălzirea motorului, este necesar să se reducă treptat rezistența activă a pornirii. rezistențe. Modificarea cuplului admisibilă în timpul accelerației M(t) este determinată de condițiile electrice și mecanice care limitează limita maximă a cuplului M > 0,85 Mmax, cuplul de comutare M2 > > Ms (Fig. 2), precum și accelerația.

Orez. 2. Caracteristicile de pornire ale unui motor asincron trifazat cu rotor de fază. Comutarea rezistențelor de pornire este asigurată prin pornirea succesivă a contactoarelor de accelerație Y1, Y2, respectiv, la momentele t1, t2, socotiți din momentul pornirii motorului, când în timpul accelerației cuplul M devine egal cu momentul de comutare M2. Datorită acestui fapt, în timpul întregii porniri, toate cuplurile de vârf sunt aceleași și toate cuplurile de comutare sunt egale între ele. Deoarece cuplul și curentul unui motor asincron cu un rotor de fază sunt reciproc legate, este posibil să se stabilească limita curentului de vârf I1 \u003d (1,5 - 2,5) Inom și curentul de comutare I2 în timpul accelerației rotorului, care ar trebui să asigure momentul de comutare M2\u003e Mc. Deconectarea motoarelor asincrone cu rotor de fază de la rețeaua de alimentare se realizează întotdeauna cu circuitul rotorului în scurtcircuit, pentru a evita supratensiunile în fazele înfășurării statorului, care pot depăși de 3-4 ori tensiunea nominală a acestor faze. dacă circuitul rotorului este deschis în momentul în care motorul este oprit.
34 Reglarea frecventei. Această metodă de control al vitezei permite utilizarea celor mai fiabile și mai ieftine motoare asincrone cu un rotor cu colivie. Cu toate acestea, pentru a modifica frecvența tensiunii de alimentare, este necesară o sursă de curent electric cu frecvență variabilă. Ca acestea din urmă, se folosesc fie generatoare sincrone cu viteză variabilă, fie convertoare de frecvență - electrice sau statice, realizate pe supape semiconductoare controlate (tiristoare). În prezent, convertoarele de frecvență au un circuit destul de complex și un cost relativ ridicat. Cu toate acestea, dezvoltarea rapidă a tehnologiei semiconductoarelor de putere ne permite să sperăm la îmbunătățirea în continuare a convertoarelor de frecvență, ceea ce deschide perspective pentru aplicare largă reglarea frecventei. O descriere detaliată a legilor de control pentru reglarea frecvenței și o analiză a funcționării unui motor asincron atunci când este alimentat de un convertor de frecvență sunt date în § 4.13 și 4.14. Reglarea prin modificarea numărului de stâlpi. Acest regulament vă permite să obțineți o schimbare treptată a vitezei. Pe fig. 4.35 afișat cel mai simplu circuit(pentru o fază), care vă permite să schimbați de două ori numărul de poli ai înfășurării statorului. Pentru a face acest lucru, fiecare fază a înfășurării statorului este împărțită în două părți, care sunt comutate de la conexiune în serie la paralelă. Din figură se poate observa că când bobinele 1-2 și 3-4 sunt pornite în două ramuri paralele, numărul de poli este înjumătățit și, în consecință, frecvența de rotație a câmpului magnetic este dublată. La comutare, numărul de spire conectate în serie în fiecare fază este înjumătățit, dar deoarece viteza de rotație se dublează, EMF indus în fază rămâne neschimbat. Prin urmare, motorul la ambele viteze poate fi conectat la rețea cu aceeași tensiune. Pentru a nu comuta înfășurarea rotorului, aceasta din urmă este efectuată circuit scurt. Dacă trebuie să aveți trei sau patru viteze, atunci o altă înfășurare este plasată pe stator, prin comutare, care puteți obține două frecvențe suplimentare. Se numesc motoarele cu inducție care schimbă poli cu mai multe viteze. Reglare prin includerea unui reostat în circuitul rotorului. Când în circuitul rotorului sunt incluse rezistențe active suplimentare R ext1, R ext2, R add3 și altele schimbă forma dependenței M = f(s) si caracteristici mecanice n 2 = f(M) motor (Fig. 4.37, a). În același timp, un moment de încărcare M n alunecare de meci s 1 , s 2 , s 3 , ..., mai mare decât slipurile s e , când motorul funcționează pe o caracteristică naturală (când R ext = 0). Prin urmare, turația motorului în regim de echilibru scade de la n e inainte de P 1 P 2 , P 3 ,... (Fig. 4.37, b). Această metodă de control poate fi utilizată numai pentru motoarele cu inele colectoare. Vă permite să schimbați fără probleme viteza într-o gamă largă. Dezavantajele sale sunt: a) pierderi mari de energie în reostatul de control; b) caracteristicile mecanice excesiv de „moale” ale motorului cu rezistență mare în circuitul rotoric. În unele cazuri, acesta din urmă este inacceptabil, deoarece o mică modificare a cuplului de sarcină corespunde unei schimbări semnificative a vitezei.
35 Generator asincron- aceasta este o mașină electrică asincronă (motor el.) care funcționează în modul generator. Cu ajutorul unui motor de antrenare (în cazul nostru, o turbină eoliană), rotorul unui generator electric asincron se rotește în aceeași direcție cu câmpul magnetic. În acest caz, alunecarea rotorului devine negativă, pe arborele mașinii asincrone apare un cuplu de frânare, iar generatorul transferă energie în rețea. Pentru excitare forta electromotoare circuitul său de ieșire folosește magnetizarea reziduală a rotorului. Pentru aceasta se folosesc condensatoare. Generatoarele asincrone nu sunt susceptibile la scurtcircuite. Un generator asincron este mai simplu decât unul sincron (de exemplu, generator auto): dacă acesta din urmă are inductori plasați pe rotor, atunci rotorul generatorului asincron arată ca un volant convențional. Un astfel de generator este mai bine protejat de murdărie și umiditate, mai rezistent la scurt circuitși suprasarcini, iar tensiunea de ieșire a generatorului asincron are un grad mai scăzut de distorsiune neliniară. Acest lucru vă permite să utilizați generatoare asincrone nu numai pentru a alimenta dispozitivele industriale care nu sunt critice pentru forma tensiunii de intrare, ci și pentru a conecta echipamente electronice. Este un generator electric asincron care este o sursă de curent ideală pentru dispozitivele cu sarcină activă (ohmică): încălzitoare electrice, convertoare de sudură, lămpi cu incandescență, dispozitive electronice, computer și inginerie radio. Beneficiile unui generator asincron. Aceste avantaje includ un factor clar scăzut (coeficient armonic), care caracterizează prezența cantitativă a armonicilor superioare în tensiunea de ieșire a generatorului. Armonicele mai mari provoacă rotație neuniformă și încălzire inutilă a motoarelor electrice. Generatoarele sincrone pot avea un factor clar de până la 15%, iar factorul clar al unui generator asincron nu depășește 2%. Astfel, un generator electric asincron produce practic doar energie utilă. Un alt avantaj al unui generator asincron este că îi lipsesc complet înfășurările rotative și părțile electronice care sunt sensibile la influențele externe și sunt destul de des predispuse la deteriorare. De aceea generator asincron uzură mică și poate servi foarte mult timp. Ieșirea generatoarelor noastre este imediat 220/380V AC, care poate fi folosit direct la aparatele de uz casnic (de exemplu, încălzitoare), pentru a încărca baterii, pentru a se conecta la o fabrică de cherestea și, de asemenea, pentru funcționarea în paralel cu o rețea tradițională. În acest caz, veți plăti pentru diferența consumată din rețea și generată de moara de vânt. pentru că Deoarece tensiunea ajunge imediat la parametrii industriali, atunci nu veți avea nevoie de diverse convertoare (invertoare) atunci când generatorul eolian este conectat direct la sarcina dumneavoastră. De exemplu, te poți conecta direct la o fabrică de cherestea și, în prezența vântului, să lucrezi ca și cum ai fi pur și simplu conectat la o rețea de 380V. După cum știți, pentru a reduce timpul de frânare la oprirea mașinilor și mecanismelor de producție, se folosesc adesea frânele mecanice. Reducerea timpului de frânare, mai ales în cazul unui ciclu scurt de lucru, duce la o creștere semnificativă a productivității mașinilor și mecanismelor. Dezavantajele frânelor mecanice sunt uzura rapidă a suprafețelor de frecare, complexitatea și necesitatea ajustării periodice a forței de frânare, nevoia de spațiu suplimentar pentru amplasarea frânei și conectarea acesteia la mecanism. Toate dezavantajele de mai sus sunt eliminate dacă, în scopurile indicate, în locul unei frâne mecanice, proprietățile motoarelor electrice sunt folosite pentru a funcționa în moduri de frânare, adică pentru a funcționa în esență ca generator și pentru a dezvolta nu un cuplu, ci un cuplul de frânare. La multe mașini de ridicare și transport (macarale, lifturi, scări rulante etc.), unde este posibilă mișcarea sub influența gravitației, se asigură o rată constantă și constantă de coborâre a sarcinilor folosind cuplul de frânare al motorului electric. Motoarele de curent continuu pot funcționa în trei moduri de frânare:
În regim de opoziție;
În modul generator cu ieșire de energie către rețea;
În modul frânare dinamică.
În oricare dintre modurile de frânare, motorul electric funcționează ca un generator, transformă, de exemplu, energia cinetică a pieselor în mișcare sau energia potențială a unei sarcini descendente în energie electrică.
36 Când motorul este inversat în mișcare prin comutarea comutatorului, frânarea are loc mai întâi de la o viteză dată la zero și apoi accelerația în cealaltă direcție. O astfel de frânare poate fi folosită și pentru frânare în timpul așa-numitului opoziţie. În timpul acestei inversări sau frânare, un motor cu inducție cu colivie veveriță are curenți semnificativi. Prin urmare, pe baza condițiilor de încălzire pentru aceste motoare, numărul de inversări pe oră nu este mai mare de zeci. Pentru a limita curenții și a crește cuplurile, rezistența este introdusă în circuitul rotorului de fază al unui motor asincron. Să luăm în considerare trei modalități principale de frânare electrică a motoarelor asincrone. Frânare prin opoziție, după cum este indicat, se realizează atunci când motorul este pornit din mers. În acest caz, câmpul magnetic se rotește în sens opus față de sensul de rotație al motorului, iar cuplul motorului frânează - acționează împotriva sensului de rotație. Frânarea generatorului are loc la comutarea unui motor cu mai multe turații în trecerea de la o turație mai mare la una mai mică, adică la trecerea mașinii de la un număr mai mic de poli la unul mai mare. În primul moment al comutării, turația motorului se dovedește a fi mult mai mare decât viteza câmpului său, adică alunecarea se dovedește a fi negativă și mașina comută în modul generator. Frânarea are loc odată cu transformarea energiei cinetice a pieselor rotative în energie electrica, care minus pierderile din mașină este dat rețelei. Frânarea generatorului poate fi și în lift la coborârea unei sarcini grele, accelerând motorul la o viteză care depășește sincron; apoi mașina începe să dea rețelei energia care i-a fost transmisă de sarcina descendentă. Frânarea generatorului este posibilă numai la viteză suprasincronă. Dacă motorul trebuie oprit la sfârșitul frânării, atunci la sfârșitul frânării, trebuie să treceți la frânare mecanică sau la un alt tip de frânare electrică (dinamică, contra-comutație). Fixarea poziției la capăt, dacă este necesar, se realizează numai cu ajutorul unei frâne mecanice. La frânare dinamică înfăşurarea statorului motorului este deconectată de la retea trifazata si este inclusa in reteaua de curent alternativ continuu sau monofazat. În acest caz, sunt posibile diferite moduri de conectare a fazelor înfășurării statorului. Înfășurarea statorului, alimentată de curent continuu, creează un câmp magnetic staționar. Așa cum în timpul funcționării normale a motorului, câmpul său rotativ trage rotorul împreună cu el, un câmp staționar în timpul frânării dinamice face ca rotorul să se oprească rapid. Energie kinetică piesele rotative sunt transformate în căldură degajată în circuitul rotorului datorită curenților induși în acesta de câmpul stator fix. Netezimea franarii este asigurata prin reglarea tensiunii la bornele statorului.Cuplul de franare al motorului cu rotor de faza poate fi reglat si printr-un reostat in circuitul rotoric. Dezavantajul frânării dinamice este necesitatea unei surse DC de joasă tensiune.
37 Mașină sincronă- aceasta este o mașină electrică de curent alternativ, a cărei viteză a rotorului este egală cu frecvența de rotație a câmpului magnetic în spațiul de aer. Principalele părți ale unei mașini sincrone sunt armătura și inductorul. Cel mai comun design este cel în care armătura este situată pe stator și există un inductor pe rotor separat de acesta printr-un spațiu de aer. O armătură este una sau mai multe înfășurări AC. La motoare, curenții furnizați armăturii creează un câmp magnetic rotativ care se cuplează cu câmpul inductorului și astfel energia este convertită. Câmpul armăturii afectează câmpul inductorului și, prin urmare, este numit și câmp de reacție ancoră. În generatoare se creează câmpul de reacție ancoră curenti alternativi induse în înfăşurarea armăturii din inductor. Inductorul este format din poli - electromagneți DC sau magneți permanenți (în micromașini). Inductoarele sincrone ale mașinii vin în două modele diferite: pol proeminent sau pol nesălient. O mașină cu stâlpi proeminenti se distinge prin faptul că polii sunt pronunțați și au un design similar cu polii unei mașini de curent continuu. Cu un design implicit al polului, înfășurarea de excitație se potrivește în canelurile miezului inductorului, foarte asemănătoare cu înfășurarea rotoarelor mașinilor asincrone cu rotor de fază, singura diferență fiind că între poli rămâne un spațiu care nu este. plin cu conductoare (așa-numitele dinte mare). Modelele de stâlpi non-solienți sunt utilizate la mașinile de mare viteză pentru a reduce sarcina mecanică pe stâlpi. Pentru a reduce rezistența magnetică, adică pentru a îmbunătăți trecerea fluxului magnetic, se folosesc miezuri feromagnetice ale rotorului și statorului. Practic, sunt o structură de oțel electric laminat (adică asamblată din foi separate). Oțelul electric are o serie de proprietăți interesante. În special, are un conținut ridicat de siliciu pentru a-și crește rezistența electrică și, prin urmare, a reduce curenții turbionari.
Acțiunea unui câmp magnetic asupra unei bobine purtătoare de curent face posibilă utilizarea acestuia pentru a determina modul de inducție magnetică. Rotirea unei bobine într-un câmp magnetic indică faptul că cel puțin două forțe acționează asupra ei. Rezultanta acestor forțe se va aplica în punctele A și B (Fig. 6.8). Cuplu, care acționează asupra bobinei, va fi egal cu produsul uneia dintre aceste forțe F̅ la raza virajului r. Acest punct nu trebuie calculat. Poate fi măsurat folosind un arc elicoidal sau alt dispozitiv sensibil pentru măsurarea cuplului mecanic conectat la bobină.
Experimentele arată că o bobină cu curent într-un câmp magnetic se rotește întotdeauna astfel încât direcția normală n̅ coincide cu direcţia inducţiei magnetice a câmpului studiat B̅. Evident, în acest caz, cuplul va fi zero. Va avea o valoare maximă atunci când unghiul dintre inducția magnetică B̅ si normal n̅ va fi de 90°.
Inducția magnetică poate fi determinată prin acțiunea forței a unui câmp magnetic asupra unui curent cu un curent.
Fără a modifica puterea curentului în conductor, investigăm modul în care depinde valoarea cuplul maxim din parametrii bobinei.
După ce am plasat bobina la o anumită distanță de conductorul purtător de curent, măsurăm cuplul maxim Mmax pentru o anumită valoare a curentului într-o bobină eu 1. Să dublăm curentul din bobină. La I 2 = 2eu 1 momentul mecanic maxim va fi egal cu M max 2 = 2M max 1. Același lucru se va observa cu o creștere a puterii curentului de 3, 4, 5 ori. În acest fel, valoarea maximă a cuplului, care actioneaza asupra bobinei cu curent, va fi proporțional cu curentul din bobină
Mmax ~eu vit.
Cuplu , care acționează asupra unei bobine într-un câmp magnetic, este proporțională cu puterea curentului din aceasta.material de pe site
Dacă înlocuim această bobină cu alta, cu o suprafață mai mare sau mai mică S vit, vom observa o creștere sau scădere corespunzătoare a valorii cuplului maxim. În acest fel,
cuplul maxim , care acționează asupra unei bobine într-un câmp magnetic, este proporțională cu aria sa:
Mmax ~S vit.
Combinând rezultatele ambelor etape de cercetare, obținem
Mmax ~eu vit.S vit.
Pe această pagină, material pe teme:
Tensiunea U 1 aplicată fazei înfășurării statorului este echilibrată de EMF principal E 1, EMF de scurgere și căderea de tensiune pe rezistența activă a înfășurării statorului:
Într-o înfășurare a rotorului, o ecuație similară va arăta astfel:
Dar, deoarece înfășurarea rotorului este închisă, tensiunea U 2 \u003d 0 și dacă luăm în considerare și faptul că E 2s \u003d SE 2 și x 2s \u003d Sx 2, atunci ecuația poate fi rescrisă ca:
![]()
Ecuația pentru curenții unui motor cu inducție repetă o ecuație similară pentru un transformator:
28 Cuplu motor asincron
Cuplul într-un motor cu inducție este creat prin interacțiunea curentului rotorului cu câmpul magnetic al mașinii. Cuplul poate fi exprimat matematic în termeni de putere electromagnetică a mașinii:
Unde w 1 =2pn 1 /60 - frecvența unghiulară de rotație a câmpului. La randul lui, n 1 =f 1 60/R, apoi
![]()
Înlocuiți în formulă M 1 expresie REm=Pe2/Sși, împărțind la 9,81, obținem:
![]()
Ecuația cuplului motorului cu inducție
Rezultă că cuplul motorului este proporțional cu pierderile electrice din rotor. Înlocuiți în ultima formulă valoarea curentă eu 2 ’ :
obținem ecuația pentru cuplul unui motor cu inducție:
Unde U 1 - tensiunea de fază a înfăşurării statorului.
29 .Caracteristica mecanică a motorului se numește dependența turației rotorului de cuplul de pe arbore n = f (M2). Deoarece cuplul în gol este mic sub sarcină, atunci M2 ≈ M și caracteristica mecanică este reprezentată de dependența n = f (M). Dacă luăm în considerare relația s = (n1 - n) / n1, atunci caracteristica mecanică poate fi obținută prezentând dependența sa grafică în coordonatele n și M (Fig. 1).
Orez. 1. Caracteristica mecanică a motorului asincron
Caracteristica mecanică naturală a unui motor cu inducție corespunde circuitului principal (pașaport) al includerii acestuia și parametrilor nominali ai tensiunii de alimentare. Caracteristici artificiale se obțin dacă sunt incluse elemente suplimentare: rezistențe, reactoare, condensatoare. Atunci când motorul este alimentat cu o tensiune nenominală, caracteristicile diferă de asemenea de caracteristica mecanică naturală.
Caracteristicile mecanice sunt un instrument foarte convenabil și util în analiza modurilor statice și dinamice ale acționării electrice.
30 Caracteristică mecanică și autoreglare motorie. Graficul care leagă mărimile mecanice - turația și cuplul - se numește caracteristica mecanică a unui motor cu inducție (Fig. 7) n = ƒ(M). Auto-reglarea unui motor asincron este după cum urmează. Lăsați motorul să funcționeze constant într-un anumit mod, dezvoltând viteza n1 și cuplul M1. Cu o rotație uniformă, acest moment este egal cu cuplul de frânare M t1, adică M1=M t 1, n1= conset. Creșterea cuplului de frânare la M2 va determina o scădere a vitezei mașinii, deoarece cuplul de frânare va deveni mai mare decât cuplul. Odată cu scăderea vitezei, alunecarea crește, ceea ce determină, la rândul său, o creștere a EMF și a curentului în rotor. Aceasta crește cuplul motorului. Acest proces se termină atunci când cuplul M2 dezvoltat de motor devine egal cu M t 2. În acest caz, viteza de rotație este setată mai mică decât n1. Proprietatea echilibrului automat între frânare și cuplu se numește autoreglare.
Pe un stand de laborator, motorul este încărcat cu o frână electrică, constând dintr-un electromagnet, în golul căruia se rotește un disc, plantat pe arborele motorului. Prin schimbarea tensiunii care alimentează bobina electromagnetului cu mânerul autotransformatorului, este posibilă modificarea forței de frânare, al cărei moment este: M TORM \u003d F r (N m)
unde F este forța (forța) care acționează asupra circumferinței scripetelui, (N);
r - raza scripetelui, egală cu 0,18 m. Putere utilă pe arborele motorului:
Unde n- viteza de rotatie a motorului, rpm.
unde ƒ - frecvența rețelei (egal cu 50 Hz),
R- numărul de perechi de poli ai înfăşurării statorului (egal cu 2).
n 1 - viteza sincronă a câmpului magnetic rotativ.
Turația motorului este determinată cu ajutorul unui turometru. Alunecarea se calculează cu formula:
31 Caracteristici de operare ei numesc dependențele puterii consumate de motor, curentul consumat I, factorul de putere, turația motorului, randamentul și cuplul M de puterea utilă a motorului degajată pe arbore. Caracteristicile de performanță determină proprietățile de bază de performanță ale unui motor cu inducție. Caracteristicile de performanță ale unui motor cu inducție de putere medie sunt prezentate în fig. 8.8. Comportamentul lor este explicat după cum urmează. La sarcini ușoare, curentul motorului I (curent fără sarcină) poate fi între 20% și 70% din curentul nominal. Pe măsură ce sarcina crește, curentul din circuitul rotorului crește, ceea ce duce la o creștere aproape proporțională a curentului euîn circuitul statorului.
Fig.8.8 Cuplu motor () este, de asemenea, aproape proporțională cu sarcina, dar la sarcini mari, liniaritatea graficului este oarecum încălcată prin reducerea turației motorului. Caracteristica de performanță exprimă relația dintre puterea dezvoltată de motor și defazajul dintre curentul și tensiunea statorului. Un motor asincron, ca un transformator, consumă un curent I din rețea, care este semnificativ defazat cu tensiunea aplicată. De exemplu, în modul inactiv. Odată cu creșterea sarcinii pe arborele motorului, componentele active ale curenților rotorului și statorului cresc, crescând . Valoarea maximă este atinsă la .
Cu o creștere suplimentară, valoarea va scădea ușor. Acest lucru se datorează unei creșteri a alunecării, care determină o creștere a reactanței înfășurării rotorului și, în consecință, defazarea . DIN crește și crește, adică. va scadea.
Comportarea caracteristicii de operare este explicată după cum urmează. Valoarea eficienței este determinată de raportul dintre puterea utilă și puterea consumată din rețea.
Valoarea se numește pierdere de putere. Pe lângă pierderile din oțelul statorului și rotorului datorate inversării magnetizării și curenților turbionari, care, împreună cu pierderile mecanice, pot fi considerate constante, există pierderi în cupru la un motor asincron. ,
acestea. în înfășurările statorului și rotorului, care sunt proporționale cu pătratul curentului care curge și, prin urmare, depind de sarcină. În timpul mersului în gol, ca într-un transformator, predomină pierderile în oțel, deoarece și este egal cu curentul fără sarcină, care este mic. Cu sarcini mici pe arbore, pierderile în cupru rămân în continuare mici și, prin urmare, eficiența determinată de formulă ![]() (8.5)
(8.5)
crește brusc la început. Când pierderile fixe devin egale cu pierderile dependente de sarcină , eficienţă atinge valoarea maximă. Odată cu o creștere suplimentară a sarcinii, pierderile de putere variabile cresc semnificativ, drept urmare eficiența scade vizibil. Natura dependenței ) poate fi explicată din relație . Dacă eficienţa a fost constantă, atunci ar exista o relație liniară între și. Dar din moment ce eficienta depinde de și această dependență crește inițial brusc, iar cu o creștere suplimentară a sarcinii se modifică ușor, apoi curba ) mai întâi crește încet, apoi crește brusc.
32 În orice circuit electric, suma puterilor tuturor surselor de energie electrică trebuie să fie egală cu suma puterilor tuturor receptoarelor și elementelor auxiliare. După ce au obținut anterior expresiile puterii, este posibil să scrieți într-o formă generală ecuația de echilibru a puterii pentru orice circuit electric:
Σ E → eu → + Σ U ← eu → = Σ E ← eu → + Σ U → eu → + Σ eu 2 r.
Ecuația (1.35) poate fi scrisă atât pentru direcțiile, tensiunile și curenții CEM reale, cât și pentru cazul în care unele dintre ele sunt direcții pozitive alese în mod arbitrar. În primul caz, toți termenii din acesta vor fi pozitivi și elementele corespunzătoare ale circuitului vor fi de fapt surse sau receptori de energie electrică. Dacă, pe de altă parte, unii termeni sunt scrisi cu privire la direcții pozitive alese în mod arbitrar, elementele corespunzătoare trebuie considerate surse și receptori intenționați. Ca rezultat al calculului sau analizei, unele dintre ele se pot dovedi negative. Aceasta va însemna că unele dintre presupusele surse sunt de fapt o chiuvetă, iar unele dintre presupusele chiuvete sunt o sursă.
33 Pornirea unui motor asincron este însoțită de un proces tranzitoriu al mașinii asociat cu trecerea rotorului de la o stare de repaus la o stare de rotație uniformă, în care cuplul motor echilibrează momentul forțelor de rezistență asupra arborelui mașinii. La pornirea unui motor asincron are loc un consum crescut de energie electrică din rețeaua de alimentare, care este cheltuită nu numai pentru depășirea cuplului de frânare aplicat arborelui și acoperirea pierderilor în motorul asincron în sine, ci și pentru comunicarea unei anumite energii cinetice. la piesele mobile ale unitatii de productie. Prin urmare, la pornire, un motor asincron trebuie să dezvolte un cuplu crescut. Pentru motor asincron cu rotor de fază cuplul inițial de pornire, corespunzător alunecării sp = 1, depinde de rezistențele active ale rezistențelor reglabile introduse în circuitul rotoric.
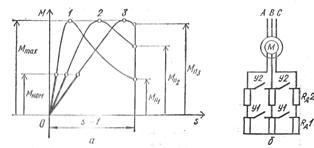
Orez. 1. Pornirea unui motor asincron trifazat cu un rotor de fază: a - grafice ale dependenței cuplului motorului cu un rotor de fază pe alunecare la diferite rezistențe active ale rezistențelor din circuitul rotorului, b - diagrama includerii rezistențe și contacte de închidere de accelerație în circuitul rotorului. Deci, cu contactele de accelerație închise U1, U2, adică la pornirea unui motor asincron cu inele de contact scurtcircuitate, cuplul inițial de pornire Mp1 = (0,5 -1,0) Mnom și curentul inițial de pornire Ip = (4,5 - 7) Inom și Mai Mult. Un cuplu de pornire inițial mic al unui motor electric asincron cu un rotor de fază poate să nu fie suficient pentru a conduce unitatea de producție și apoi pentru a o accelera, iar un curent de pornire semnificativ va determina o încălzire crescută a înfășurărilor motorului, ceea ce limitează frecvența de pornire a acestuia. , iar în rețelele de putere redusă duce la funcționarea nedorită a altor receptori căderea temporară de tensiune. Aceste circumstanțe pot fi motivul care exclude utilizarea motoarelor asincrone cu un rotor de fază cu un curent mare de pornire pentru a conduce mecanismele de lucru. Introducerea rezistențelor reglabile, numite rezistențe de pornire, în circuitul rotorului motorului nu numai că reduce curentul inițial de pornire, dar în același timp crește cuplul inițial de pornire, care poate atinge cuplul maxim Mmax (Fig. 1, a, curba 3). ), dacă alunecarea critică a motorului cu un rotor de fază este sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, unde Rd" este rezistența activă a rezistorului situat în faza de înfăşurarea rotorului motorului, redusă la faza înfăşurării statorului. O creștere suplimentară a rezistenței active a rezistenței de pornire este nepractică, deoarece duce la o slăbire a cuplului inițial de pornire și la ieșirea punctului de cuplu maxim în regiunea de alunecare s > 1, ceea ce exclude posibilitatea de accelerare a rotorului. Rezistența activă necesară a rezistențelor pentru pornirea unui motor cu un rotor de fază este determinată pe baza cerințelor de pornire, care poate fi ușor atunci când Mp = (0,1 - 0,4) Mnom, normal dacă Mp - (0,5 - 0,75) Mnom, și grele la Mp ≥ Mnom. Pentru a menține un cuplu suficient de mare de către motorul cu un rotor de fază în timpul accelerării unității de producție pentru a reduce durata procesului tranzitoriu și a reduce încălzirea motorului, este necesar să se reducă treptat rezistența activă a pornirii. rezistențe. Modificarea admisibilă a cuplului în timpul accelerației M(t) este determinată de condițiile electrice și mecanice care limitează limita maximă a cuplului M > 0,85 Mmax, momentul de comutare M2 > > Ms (Fig. 2), precum și accelerația.
Orez. 2. Caracteristicile de pornire ale unui motor asincron trifazat cu rotor de fază. Comutarea rezistențelor de pornire este asigurată prin pornirea succesivă a contactoarelor de accelerație Y1, Y2, respectiv, la momentele t1, t2, socotiți din momentul pornirii motorului, când în timpul accelerației cuplul M devine egal cu momentul de comutare M2. Datorită acestui fapt, în timpul întregii porniri, toate cuplurile de vârf sunt aceleași și toate cuplurile de comutare sunt egale între ele. Deoarece cuplul și curentul unui motor asincron cu un rotor de fază sunt reciproc legate, este posibil să se stabilească limita curentului de vârf I1 \u003d (1,5 - 2,5) Inom și curentul de comutare I2 în timpul accelerației rotorului, care ar trebui să asigure momentul de comutare M2\u003e Mc. Deconectarea motoarelor asincrone cu rotor de fază de la rețeaua de alimentare se realizează întotdeauna cu circuitul rotorului în scurtcircuit, pentru a evita supratensiunile în fazele înfășurării statorului, care pot depăși de 3-4 ori tensiunea nominală a acestor faze. dacă circuitul rotorului este deschis în momentul în care motorul este oprit.
34 Reglarea frecventei. Această metodă de control al vitezei permite utilizarea celor mai fiabile și mai ieftine motoare asincrone cu un rotor cu colivie. Cu toate acestea, pentru a modifica frecvența tensiunii de alimentare, este necesară o sursă de curent electric cu frecvență variabilă. Ca acestea din urmă, se folosesc fie generatoare sincrone cu viteză variabilă, fie convertoare de frecvență - electrice sau statice, realizate pe supape semiconductoare controlate (tiristoare). În prezent, convertoarele de frecvență au un circuit destul de complex și un cost relativ ridicat. Cu toate acestea, dezvoltarea rapidă a tehnologiei semiconductoarelor de putere ne permite să sperăm la îmbunătățirea în continuare a convertoarelor de frecvență, ceea ce deschide perspective pentru utilizarea pe scară largă a reglării frecvenței. O descriere detaliată a legilor de control pentru reglarea frecvenței și o analiză a funcționării unui motor asincron atunci când este alimentat de un convertor de frecvență sunt date în § 4.13 și 4.14. Reglarea prin modificarea numărului de stâlpi. Acest regulament vă permite să obțineți o schimbare treptată a vitezei. Pe fig. 4.35 arată cel mai simplu circuit (pentru o fază), care vă permite să schimbați de două ori numărul de poli ai înfășurării statorului. Pentru a face acest lucru, fiecare fază a înfășurării statorului este împărțită în două părți, care sunt comutate de la conexiune în serie la paralelă. Din figură se poate observa că când bobinele 1-2 și 3-4 sunt pornite în două ramuri paralele, numărul de poli este înjumătățit și, în consecință, frecvența de rotație a câmpului magnetic este dublată. La comutare, numărul de spire conectate în serie în fiecare fază este înjumătățit, dar deoarece viteza de rotație se dublează, EMF indus în fază rămâne neschimbat. Prin urmare, motorul la ambele viteze poate fi conectat la rețea cu aceeași tensiune. Pentru a nu comuta înfășurarea rotorului, aceasta din urmă este efectuată circuit scurt. Dacă trebuie să aveți trei sau patru viteze, atunci o altă înfășurare este plasată pe stator, prin comutare, care puteți obține două frecvențe suplimentare. Se numesc motoarele cu inducție care schimbă poli cu mai multe viteze. Reglare prin includerea unui reostat în circuitul rotorului. Când în circuitul rotorului sunt incluse rezistențe active suplimentare R ext1, R ext2, R add3 și altele schimbă forma dependenței M = f(s) si caracteristici mecanice n 2 = f(M) motor (Fig. 4.37, a). În același timp, un moment de încărcare M n alunecare de meci s 1 , s 2 , s 3 , ..., mai mare decât slipurile s e , când motorul funcționează pe o caracteristică naturală (când R ext = 0). Prin urmare, turația motorului în regim de echilibru scade de la n e inainte de P 1 P 2 , P 3 ,... (Fig. 4.37, b). Această metodă de control poate fi utilizată numai pentru motoarele cu inele colectoare. Vă permite să schimbați fără probleme viteza într-o gamă largă. Dezavantajele sale sunt: a) pierderi mari de energie în reostatul de control; b) caracteristicile mecanice excesiv de „moale” ale motorului cu rezistență mare în circuitul rotoric. În unele cazuri, acesta din urmă este inacceptabil, deoarece o mică modificare a cuplului de sarcină corespunde unei schimbări semnificative a vitezei.
35 Generator asincron- aceasta este o mașină electrică asincronă (motor el.) care funcționează în modul generator. Cu ajutorul unui motor de antrenare (în cazul nostru, o turbină eoliană), rotorul unui generator electric asincron se rotește în aceeași direcție cu câmpul magnetic. În acest caz, alunecarea rotorului devine negativă, pe arborele mașinii asincrone apare un cuplu de frânare, iar generatorul transferă energie în rețea. Pentru a excita forța electromotoare în circuitul său de ieșire, se folosește magnetizarea reziduală a rotorului. Pentru aceasta se folosesc condensatoare. Generatoarele asincrone nu sunt susceptibile la scurtcircuite. Un generator asincron este mai simplu decât unul sincron (de exemplu, un generator auto): dacă acesta din urmă are inductori plasați pe rotor, atunci rotorul generatorului asincron arată ca un volant convențional. Un astfel de generator este mai bine protejat de murdărie și umiditate, mai rezistent la scurtcircuite și suprasarcini, iar tensiunea de ieșire a unui generator asincron are un grad mai scăzut de distorsiune neliniară. Acest lucru vă permite să utilizați generatoare asincrone nu numai pentru a alimenta dispozitivele industriale care nu sunt critice pentru forma tensiunii de intrare, ci și pentru a conecta echipamente electronice. Este un generator electric asincron care este o sursă de curent ideală pentru dispozitivele cu sarcină activă (ohmică): încălzitoare electrice, convertoare de sudură, lămpi cu incandescență, dispozitive electronice, computer și inginerie radio. Beneficiile unui generator asincron . Aceste avantaje includ un factor clar scăzut (coeficient armonic), care caracterizează prezența cantitativă a armonicilor superioare în tensiunea de ieșire a generatorului. Armonicele mai mari provoacă rotație neuniformă și încălzire inutilă a motoarelor electrice. Generatoarele sincrone pot avea un factor clar de până la 15%, iar factorul clar al unui generator asincron nu depășește 2%. Astfel, un generator electric asincron produce practic doar energie utilă. Un alt avantaj al unui generator asincron este că îi lipsesc complet înfășurările rotative și părțile electronice care sunt sensibile la influențele externe și sunt destul de des predispuse la deteriorare. Prin urmare, generatorul asincron nu este supus uzurii și poate funcționa foarte mult timp. Ieșirea generatoarelor noastre este imediat 220/380V AC, care poate fi folosit direct la aparatele de uz casnic (de exemplu, încălzitoare), pentru a încărca baterii, pentru a se conecta la o fabrică de cherestea și, de asemenea, pentru funcționarea în paralel cu o rețea tradițională. În acest caz, veți plăti pentru diferența consumată din rețea și generată de moara de vânt. pentru că Deoarece tensiunea ajunge imediat la parametrii industriali, atunci nu veți avea nevoie de diverse convertoare (invertoare) atunci când generatorul eolian este conectat direct la sarcina dumneavoastră. De exemplu, te poți conecta direct la o fabrică de cherestea și, în prezența vântului, să lucrezi ca și cum ai fi pur și simplu conectat la o rețea de 380V. După cum știți, pentru a reduce timpul de frânare la oprirea mașinilor și mecanismelor de producție, se folosesc adesea frânele mecanice. Reducerea timpului de frânare, mai ales în cazul unui ciclu scurt de lucru, duce la o creștere semnificativă a productivității mașinilor și mecanismelor. Dezavantajele frânelor mecanice sunt uzura rapidă a suprafețelor de frecare, complexitatea și necesitatea ajustării periodice a forței de frânare, nevoia de spațiu suplimentar pentru amplasarea frânei și conectarea acesteia la mecanism. Toate dezavantajele de mai sus sunt eliminate dacă, în scopurile indicate, în locul unei frâne mecanice, proprietățile motoarelor electrice sunt folosite pentru a funcționa în moduri de frânare, adică pentru a funcționa în esență ca generator și pentru a dezvolta nu un cuplu, ci un cuplul de frânare. La multe mașini de ridicare și transport (macarale, lifturi, scări rulante etc.), unde este posibilă mișcarea sub influența gravitației, se asigură o rată constantă și constantă de coborâre a sarcinilor folosind cuplul de frânare al motorului electric. Motoarele de curent continuu pot funcționa în trei moduri de frânare:
În regim de opoziție;
În modul generator cu ieșire de energie către rețea;
În modul de frânare dinamică.
În oricare dintre modurile de frânare, motorul electric funcționează ca un generator, transformă, de exemplu, energia cinetică a pieselor în mișcare sau energia potențială a unei sarcini descendente în energie electrică.
36 Când motorul este inversat în mișcare prin comutarea comutatorului, frânarea are loc mai întâi de la o viteză dată la zero și apoi accelerația în cealaltă direcție. O astfel de frânare poate fi folosită și pentru frânare în timpul așa-numitului opoziţie. În timpul acestei inversări sau frânare, un motor cu inducție cu colivie veveriță are curenți semnificativi. Prin urmare, pe baza condițiilor de încălzire pentru aceste motoare, numărul de inversări pe oră nu este mai mare de zeci. Pentru a limita curenții și a crește cuplurile, rezistența este introdusă în circuitul rotorului de fază al unui motor asincron. Să luăm în considerare trei modalități principale de frânare electrică a motoarelor asincrone. Frânare prin opoziție, după cum este indicat, se realizează atunci când motorul este pornit din mers. În acest caz, câmpul magnetic se rotește în sens opus față de sensul de rotație al motorului, iar cuplul motorului frânează - acționează împotriva sensului de rotație. Frânarea generatorului are loc la comutarea unui motor cu mai multe turații în trecerea de la o turație mai mare la una mai mică, adică la trecerea mașinii de la un număr mai mic de poli la unul mai mare. În primul moment al comutării, turația motorului se dovedește a fi mult mai mare decât viteza câmpului său, adică alunecarea se dovedește a fi negativă și mașina comută în modul generator. Frânarea are loc cu conversia energiei cinetice a pieselor rotative în energie electrică, care, minus pierderile din mașină, este dată rețelei. Frânarea generatorului poate fi și în lift la coborârea unei sarcini grele, accelerând motorul la o viteză care depășește sincron; apoi mașina începe să dea rețelei energia care i-a fost transmisă de sarcina descendentă. Frânarea generatorului este posibilă numai la viteză suprasincronă. Dacă motorul trebuie oprit la sfârșitul frânării, atunci la sfârșitul frânării, trebuie să treceți la frânare mecanică sau la un alt tip de frânare electrică (dinamică, contra-comutație). Fixarea poziției la capăt, dacă este necesar, se realizează numai cu ajutorul unei frâne mecanice. La frânare dinamică înfășurarea statorului motorului este deconectată de la rețeaua trifazată și conectată la rețeaua DC sau monofazată AC. În acest caz, sunt posibile diferite moduri de conectare a fazelor înfășurării statorului. Înfășurarea statorului, alimentată de curent continuu, creează un câmp magnetic staționar. Așa cum în timpul funcționării normale a motorului, câmpul său rotativ trage rotorul împreună cu el, un câmp staționar în timpul frânării dinamice face ca rotorul să se oprească rapid. Energia cinetică a pieselor rotative este transformată în căldură degajată în circuitul rotorului datorită curenților induși în acesta de câmpul stator fix. Netezimea franarii este asigurata prin reglarea tensiunii la bornele statorului.Cuplul de franare al motorului cu rotor de faza poate fi reglat si printr-un reostat in circuitul rotoric. Dezavantajul frânării dinamice este necesitatea unei surse DC de joasă tensiune.
37 Mașină sincronă- aceasta este o mașină electrică de curent alternativ, a cărei viteză a rotorului este egală cu frecvența de rotație a câmpului magnetic în spațiul de aer. Principalele părți ale unei mașini sincrone sunt armătura și inductorul. Cel mai comun design este cel în care armătura este situată pe stator și există un inductor pe rotor separat de acesta printr-un spațiu de aer. O armătură este una sau mai multe înfășurări AC. La motoare, curenții furnizați armăturii creează un câmp magnetic rotativ care se cuplează cu câmpul inductorului și astfel energia este convertită. Câmpul armăturii afectează câmpul inductorului și, prin urmare, este numit și câmp de reacție ancoră. La generatoare, câmpul de reacție al armăturii este creat de curenții alternativi induși în înfășurarea armăturii de la inductor. Inductorul este format din poli - electromagneți DC sau magneți permanenți (în micromașini). Inductoarele sincrone ale mașinii vin în două modele diferite: pol proeminent sau pol nesălient. O mașină cu stâlpi proeminenti se distinge prin faptul că polii sunt pronunțați și au un design similar cu polii unei mașini de curent continuu. Cu un design implicit al polului, înfășurarea de excitație se potrivește în canelurile miezului inductorului, foarte asemănătoare cu înfășurarea rotoarelor mașinilor asincrone cu rotor de fază, singura diferență fiind că între poli rămâne un spațiu care nu este. plin cu conductoare (așa-numitele dinte mare). Modelele de stâlpi non-solienți sunt utilizate la mașinile de mare viteză pentru a reduce sarcina mecanică pe stâlpi. Pentru a reduce rezistența magnetică, adică pentru a îmbunătăți trecerea fluxului magnetic, se folosesc miezuri feromagnetice ale rotorului și statorului. Practic, sunt o structură de oțel electric laminat (adică asamblată din foi separate). Oțelul electric are o serie de proprietăți interesante. În special, are un conținut ridicat de siliciu pentru a-și crește rezistența electrică și, prin urmare, a reduce curenții turbionari.
Vă sfătuim să citiți
 Caracteristicile psihologice ale copiilor în adolescență
Caracteristicile psihologice ale copiilor în adolescență Transferarea unui copil la o altă școală - procedura și documentele necesare Dacă se transferă un copil la o altă școală
Transferarea unui copil la o altă școală - procedura și documentele necesare Dacă se transferă un copil la o altă școală, diagnostic, tratament Tratamentul chlamydia urogenitală") Chlamydia urogenitală - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenitală
Chlamydia urogenitală - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenitală Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce
Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce

