momento elettromagnetico a motore sincronoè creato dall'interazione della corrente nell'avvolgimento del rotore con un campo magnetico rotante.
Momento elettromagnetico M proporzionale alla potenza elettromagnetica:
 (3.40)
(3.40)
Velocità di rotazione sincrona angolare.
Sostituendo in (3.39) il valore della potenza elettromagnetica (3.33), otteniamo:
 , (3.41)
, (3.41)
cioè, il momento elettromagnetico di un motore a induzione è proporzionale alla potenza delle perdite elettriche nell'avvolgimento del rotore.
Se il valore della corrente del rotore secondo l'espressione (3.28) viene sostituito nella (3.41), otteniamo la formula momento elettromagnetico macchina asincrona (Nm):
 (3.42)
(3.42)
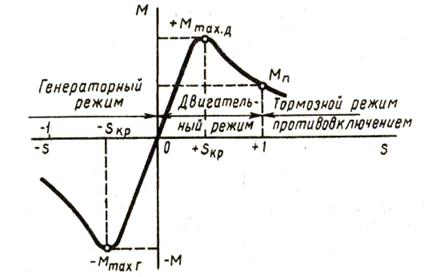
Parametri di circuito equivalente di macchina asincrona r 1 , r¢ 2 , x 1 e x¢ 2, inclusi nell'espressione (3.42), sono costanti, poiché i loro valori rimangono praticamente invariati al variare del carico della macchina. Anche la tensione sull'avvolgimento di fase dello statore può essere considerata costante. U 1 e frequenza f1. In termini di momento M l'unica variabile è slip S, che per diverse modalità di funzionamento di una macchina asincrona può assumere valori diversi nell'intervallo da +¥ a -¥ (vedi Fig. 3.5).
Considera la dipendenza della coppia dallo scorrimento M = f(i) a U 1= cost, f1= parametri cost e costanti del circuito equivalente. Questa dipendenza è chiamata caratteristica meccanica macchina asincrona. Analisi dell'espressione (3.42), che è un'espressione analitica di una caratteristica meccanica M = f(i), lo mostra per i valori di scorrimento S= 0 e S= ¥ momento elettromagnetico M= 0. Da ciò segue che la caratteristica meccanica M = f(i) ha un massimo.
Per determinare lo slittamento critico s cre, corrispondente al momento massimo, occorre prendere la derivata prima della (3.42) e uguagliarla a zero: . Di conseguenza
 (3.43)
(3.43)
Sostituendo il valore dello scorrimento critico (secondo 3.43) nell'espressione del momento elettromagnetico (3.42), dopo una serie di trasformazioni, otteniamo l'espressione per il momento massimo (N m):
 (3.44)
(3.44)
In (3.43) e (3.44) il segno più corrisponde alla modalità motore e il segno meno alla modalità di funzionamento generatore della macchina asincrona.
Per macchine asincrone scopo generale resistenza attiva dell'avvolgimento statorico r1 molto inferiore alla somma delle reattanze induttive: r1< < (x 1 + x¢ 2). Pertanto, trascurando il valore r1, otteniamo espressioni semplificate per lo slip critico
 , (3.45)
, (3.45)
e coppia massima (N m)
 (3.46)
(3.46)
Riso. 3.10. Dipendenza delle modalità di funzionamento di una macchina asincrona in slittamento
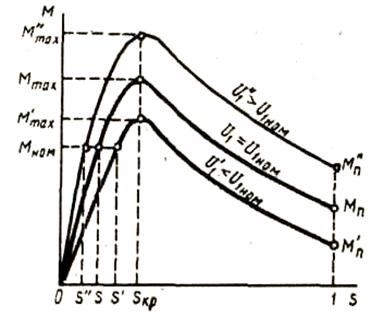
L'analisi dell'espressione (3.44) lo mostra momento massimo ci sono più macchine asincrone in modalità generatore che in modalità motore ( M max à > Ì maxD). Sulla fig. 3.4 mostra le caratteristiche meccaniche di una macchina asincrona M = f(i) a U 1= cost. Questa caratteristica indica le zone corrispondenti a diverse modalità di funzionamento: modalità motore (0< S < 1), когда электромагнитный момент M sta ruotando; modalità generatore ( - ¥ < s < 0) и тормозной режим противовключением (1 < S < + ¥), когда электромагнитный момент Mè inibitorio.
Dalla (3.42) segue che la coppia elettromagnetica di un motore a induzione è proporzionale al quadrato della tensione di rete: M ≡ U 1 2. Questo ha un effetto significativo sulle prestazioni del motore: anche un leggero calo della tensione di rete provoca una notevole riduzione della coppia del motore a induzione. Ad esempio, quando la tensione di rete viene ridotta del 10% rispetto al valore nominale ( U 1 = 0.9Un nom) la coppia elettromagnetica del motore è ridotta del 19%: М¢ = 0.9 2 M = 0.81M, dove M— momento alla tensione nominale della rete, e M¢ - coppia a tensione ridotta.
Per analizzare il funzionamento di un motore asincrono, è più conveniente utilizzare la caratteristica meccanica M = f(i), mostrato in fig. 3.5.
 |
Riso. 3.11. Dipendenza della coppia elettromagnetica di un motore a induzione dallo scorrimento
Quando il motore è collegato alla rete, il campo magnetico dello statore, senza inerzia, inizia immediatamente a ruotare con frequenza sincrona n 1, allo stesso tempo, il rotore del motore sotto l'influenza delle forze di inerzia al momento iniziale dell'avviamento rimane immobile ( n2= 0) e scorrevole S = 1.
Sostituendo nella (3.42) lo slip S= 1, otteniamo l'espressione per la coppia di spunto di un motore asincrono (N m):
 (3.47)
(3.47)
Sotto l'azione di questo momento, inizia la rotazione del rotore del motore, mentre lo scorrimento diminuisce e la coppia aumenta secondo la caratteristica M = f(i). In scivolata critica s cre momento raggiunge il suo valore massimo M max.
Con un ulteriore aumento della velocità di rotazione (riduzione dello scorrimento), il momento M inizia a decrescere fino a raggiungere un valore costante pari alla somma dei momenti di contrasto applicati al rotore del motore: momento XX M0 e coppia di carico utile (coppia sull'albero motore) M2, questo è
M \u003d M 0 + M 2 \u003d M st. (3.48)
Va tenuto presente che con slittamenti vicini all'unità (modalità di avviamento del motore), i parametri del circuito equivalente di un motore asincrono cambiano notevolmente i loro valori. Ciò è principalmente spiegato da due fattori: aumento della saturazione magnetica degli strati dentati dello statore e del rotore, che porta ad una diminuzione della resistenza di dispersione induttiva x 1 e x 2 e l'effetto dello spostamento di corrente nelle barre del rotore, che porta ad un aumento della resistenza attiva dell'avvolgimento del rotore r 2 ¢. Pertanto, i parametri del circuito equivalente di un motore asincrono utilizzati nel calcolo della coppia elettromagnetica secondo (3.42), (3.44) e (3.46) non possono essere utilizzati per calcolare la coppia di spunto secondo (3.47).
Momento statico M stè uguale alla somma dei momenti contrastanti con rotazione uniforme del rotore ( n2= cost). Assumiamo che il momento di contrasto sull'albero motore M2 corrisponde al carico nominale del motore. In questo caso, lo stato stazionario del funzionamento del motore è determinato da un punto della caratteristica meccanica con coordinate M = M nom e s = s nom, dove M nom e s nom— valori nominali di coppia elettromagnetica e scorrimento.
Dall'analisi della caratteristica meccanica segue anche, che il funzionamento stabile di un motore a induzione è possibile con slittamenti inferiori a quelli critici (S< s кр ), cioè nella sezione OA della caratteristica meccanica. Il fatto è che è in quest'area che una variazione del carico sull'albero del motore è accompagnata da una corrispondente variazione della coppia elettromagnetica.
Quindi, se il motore funzionava in modalità nominale ( M nom; s nom), allora i momenti sono uguali: M nom \u003d M 0 + M 2. In caso di aumento della coppia di carico M2 fino a valore М¢ 2, allora verrà violata l'uguaglianza dei momenti, cioè M nom< М 0 + М 2 , e la velocità del rotore comincerà a diminuire (lo slittamento aumenterà). Ciò comporterà un aumento della coppia elettromagnetica a un valore M¢ \u003d M 0 + M¢ 2, (punto B), dopodiché la modalità di funzionamento del motore tornerà a stabilizzarsi.
Se, durante il funzionamento del motore nella modalità nominale, la coppia di carico diminuisce al valore М¢¢ 2, quindi l'uguaglianza dei momenti verrà nuovamente violata, ma ora la coppia sarà maggiore della somma degli opposti: M nom > M 0 + M¢¢ 2. La velocità del rotore comincerà ad aumentare (lo scorrimento diminuirà) e ciò comporterà una diminuzione della coppia elettromagnetica M fino a valore M¢¢ \u003d M 0 + M¢¢ 2(punto C); la modalità di funzionamento stabile verrà ripristinata di nuovo, ma ad altri valori M e S.
Il funzionamento di un motore a induzione diventa instabile durante gli slittamenti s³ cr. Quindi, se la coppia elettromagnetica del motore M = M max, e scivolare s = s cre, quindi anche un leggero aumento del momento di carico M2, provocando un aumento dello slittamento S, comporterà una diminuzione della coppia elettromagnetica M. Questo sarà seguito da un ulteriore aumento dello slip, e così via, fino a quando lo slip non raggiunge il valore S= 1, cioè fino all'arresto del rotore del motore.
Pertanto, quando la coppia elettromagnetica raggiunge il suo valore massimo, si instaura il limite di funzionamento stabile del motore a induzione. Pertanto, per un funzionamento stabile del motore, è necessario che la somma dei momenti di carico agenti sul rotore sia inferiore alla coppia massima: M st \u003d (M 0 + M 2)< М тах . Ma affinché il funzionamento di un motore a induzione sia affidabile e in modo che sovraccarichi casuali a breve termine non causino l'arresto del motore, è necessario che abbia capacità di sovraccarico.
Capacità di sovraccarico del motore λ è determinato dal rapporto tra il momento massimo M max a nominale M nom. Per motori a induzione la capacità di sovraccarico per uso generale è = 1,7 ÷ 2,5.
Dovresti anche prestare attenzione al fatto che il funzionamento del motore durante lo scorrimento S< s кр , cioè, nella sezione di lavoro della caratteristica meccanica, è il più economico, poiché corrisponde a piccoli valori di scorrimento e, di conseguenza, a valori inferiori di perdite elettriche nell'avvolgimento del rotore P e2 \u003d sp em.
L'uso della formula (3.35) per il calcolo delle caratteristiche meccaniche dei motori asincroni non è sempre possibile, poiché i parametri del circuito equivalente dei motori non sono solitamente riportati nei cataloghi e nei libri di consultazione, quindi, per calcoli pratici, si utilizza una formula di coppia semplificata solitamente usato. Questa formula si basa sul presupposto che la resistenza attiva dell'avvolgimento dello statore di un motore a induzione r1= 0, mentre:
 (3.49)
(3.49)
Lo scorrimento critico è determinato dalla formula:
![]() . (3.50)
. (3.50)
Il calcolo della caratteristica meccanica è molto più semplice se effettuato in unità relative  . In questo caso, l'equazione caratteristica meccanica ha la forma:
. In questo caso, l'equazione caratteristica meccanica ha la forma:
 . (3.51)
. (3.51)
L'uso di una formula semplificata (3.51) è più appropriato per il calcolo della sezione di lavoro della caratteristica meccanica durante lo scorrimento S< s кр , poiché in questo caso l'errore non supera i valori ammessi per i calcoli tecnici. Quando si scivola s > s cre l'errore può raggiungere il 15-17%.
Caratteristiche meccaniche di un motore asincrono con variazioni della tensione di rete e resistenza attiva dell'avvolgimento del rotore
Da (3.42), (3.44) e (3.47) si può notare che la coppia elettromagnetica del motore a induzione, così come i suoi valori massimi e di avviamento, sono proporzionali al quadrato della tensione fornita all'avvolgimento dello statore: M ≡ U 1 2 . Allo stesso tempo, l'analisi dell'espressione (3.43) mostra che il valore dello scorrimento critico non dipende dalla sollecitazione U1. Questo ci dà l'opportunità di tracciare le caratteristiche meccaniche M = f(i) per valori diversi voltaggio U 1(Fig. 3.12), da cui ne consegue che le fluttuazioni della tensione di rete U 1 su di lui valore nominale U 1 nom sono accompagnati non solo da variazioni della coppia massima e di spunto, ma anche da variazioni della velocità del rotore.
 |
Riso. 3.12. Influenza della tensione sul tipo di caratteristica meccanica di un motore a induzione
Al diminuire della tensione di rete, la velocità del rotore diminuisce (slittamento aumenta). Voltaggio U 1 influenza l'assegnazione del momento massimo M tah, così come la capacità di sovraccarico del motore. Quindi se la tensione U 1 diminuito del 30%, cioè U 1 \u003d 0,7 U nom, quindi la coppia massima del motore a induzione sarà più che dimezzata:
M¢ max = 0,7 2 M max = 0.49M max.
Di quanto diminuirà la capacità di sovraccarico del motore Se, ad esempio, alla tensione nominale della rete, la capacità di sovraccarico  , quindi quando la tensione scende del 30%, la capacità di sovraccarico del motore
, quindi quando la tensione scende del 30%, la capacità di sovraccarico del motore  , cioè | il motore non è in grado di sopportare nemmeno il carico nominale.
, cioè | il motore non è in grado di sopportare nemmeno il carico nominale.
Come segue da (3.44), il valore della coppia massima del motore non dipende dalla resistenza attiva del rotore r¢ 2 . Per quanto riguarda lo scivolone critico s cr, allora, come si vede dalla (3.43), è proporzionale alla resistenza r¢ 2 . Pertanto, se in un motore asincrono la resistenza attiva del circuito del rotore viene gradualmente aumentata, il valore della coppia massima rimarrà invariato e lo scorrimento critico aumenterà (Fig. 3.13). In questo caso, la coppia di spunto del motore M P aumenta con l'aumentare della resistenza r¢ 2 fino a un certo valore. Nella figura corrisponde alla resistenza r¢ 2 III, a cui la coppia di spunto è uguale al massimo. Con ulteriore aumento della resistenza r¢ 2 la coppia di spunto è ridotta.
 |
Riso. 3.13. L'influenza della resistenza attiva dell'avvolgimento del rotore sulle caratteristiche meccaniche di un motore asincrono.
Analisi del grafico M = f(i), mostrato in fig. 3.13 mostra anche che cambia la resistenza del rotore r¢ 2 accompagnato da variazioni della velocità di rotazione: con un aumento r¢ 2 con momento di carico costante Mst lo slittamento aumenta, cioè la velocità diminuisce (punti 1, 2, 3 e 4).
L'influenza della resistenza attiva dell'avvolgimento del rotore sulla forma delle caratteristiche meccaniche dei motori asincroni viene utilizzata nella progettazione dei motori. Ad esempio, i motori asincroni per uso generico devono avere una caratteristica di velocità "dura" (vedere Fig. 3.11), ovvero funzionare con uno scorrimento nominale ridotto. Ciò si ottiene utilizzando un avvolgimento del rotore con bassa resistenza attiva nel motore. r¢ 2. In questo caso il motore ha una maggiore efficienza grazie alla riduzione delle perdite elettriche nell'avvolgimento del rotore ( R e2 \u003d m 1 I¢ 2 2 r¢ 2). Valore selezionato r¢ 2 deve fornire al motore la coppia di avviamento richiesta.
Se è necessario ottenere un motore con un valore maggiore della coppia di spunto, viene aumentata la resistenza attiva dell'avvolgimento del rotore. Ma allo stesso tempo si ottiene un motore con un elevato valore di slittamento nominale e, di conseguenza, con un rendimento inferiore.
Dipendenze considerate M \u003d f (U 1) e M = f(r 2 ") sono anche di grande importanza pratica quando si considerano le questioni di avviamento e controllo della velocità di rotazione dei motori asincroni.
Caratteristiche prestazionali del motore asincrono
Le caratteristiche prestazionali di un motore a induzione (Fig. 3.14) sono espresse graficamente in dipendenza della velocità di rotazione n2, efficienza h, momento utile (coppia sull'albero) M2, fattore di potenza cosφ 1, e la corrente dello statore io 1, dal potere utile R 2 a U 1= cost e f1= cost.

Riso. 3.14. Caratteristiche prestazionali del motore asincrono
caratteristica di velocitàn 2 \u003d f (P 2).
Velocità del rotore del motore a induzione
n 2 = n 1 (1-s).
Scorrevole (3.33)
cioè, lo scorrimento del motore, e quindi la sua velocità, è determinato dal rapporto tra le perdite elettriche nel rotore e la potenza elettromagnetica R em.
Trascurando le perdite elettriche nel rotore in modalità idle, possiamo prendere R e2= 0, e quindi s0 ≈ 0 e n 20 ≈ n 1,. All'aumentare del carico sull'albero motore, il rapporto (8,1) cresce, raggiungendo valori di 0,01 ÷ 0,08 al carico nominale. In accordo con questa dipendenza n 2 = f(P 2)è una curva leggermente inclinata rispetto all'asse x.
Tuttavia, con un aumento della resistenza attiva del rotore r¢ 2 la pendenza di questa curva aumenta. In questo caso, cambia la velocità di rotazione p 2 durante le fluttuazioni di carico R 2 aumento. Ciò è spiegato dal fatto che con l'aumento r¢ 2 le perdite elettriche nel rotore aumentano [vedi. (3.31)].
Prestazioni meccaniche M 2 = f(P 2)
La dipendenza del momento utile dall'albero motore M2 dalla potenza netta R 2è definito dall'espressione
 (3.53)
(3.53)
dove R 2— potenza utile, W;
è la frequenza angolare di rotazione del rotore.
Ne consegue da questa espressione che se n2= const, quindi il grafico M 2 \u003d f (P 2)è una linea retta. Ma in un motore asincrono con carico crescente R 2 la velocità del rotore diminuisce, e quindi il momento utile sull'albero M2 all'aumentare del carico, aumenta leggermente più velocemente del carico e, quindi, del grafico M2 = f(P2) ha un aspetto curvilineo.
Dipendenza cosφ 1 = f(P 2)
A causa del fatto che la corrente dello statore io 1 ha una componente reattiva (induttiva) necessaria per creare un campo magnetico nello statore, il fattore di potenza dei motori asincroni è inferiore a uno.
Il valore più basso del fattore di potenza corrisponde alla modalità XX. Ciò è spiegato dal fatto che l'attuale XX io 0 sotto qualsiasi carico rimane praticamente invariato. Pertanto, a bassi carichi del motore, la corrente dello statore è piccola e largamente reattiva ( io 1 ≈ io 0). Di conseguenza, lo sfasamento della corrente dello statore rispetto alla tensione è significativo ( φ ≈ φ 0 ), solo leggermente inferiore a 90° (Fig. 3.15).
Il fattore di potenza dei motori asincroni in modalità XX di solito non supera 0,2. Con un aumento del carico sull'albero motore, la componente attiva della corrente aumenta io 1 e il fattore di potenza aumenta, raggiungendo il valore più alto (0,80 ÷ 0,90) ad un carico prossimo a quello nominale.
 |
Fig.3.15. Diagramma vettoriale di un motore a induzione sotto carico leggero
Un ulteriore aumento del carico è accompagnato da una diminuzione cosφ 1, che si spiega con l'aumento della resistenza induttiva del rotore ( x 2s) aumentando lo scorrimento, e quindi la frequenza della corrente nel rotore. Per migliorare il fattore di potenza dei motori asincroni, è estremamente importante che il motore funzioni sempre, o almeno per una parte significativa del tempo, con un carico prossimo al carico nominale.
Questo può essere garantito solo se giusta scelta potenza del motore. Se il motore funziona sottocarico per una parte significativa del tempo, aumentare cosφ 1 tensione opportunamente applicata al motore U 1 diminuire.
Ad esempio, nei motori funzionanti con una connessione a triangolo dell'avvolgimento dello statore, ciò può essere fatto ricollegando gli avvolgimenti dello statore a stella, il che provocherà una diminuzione tensione di fase in tempo. In questo caso, il flusso magnetico dello statore, e di conseguenza la corrente di magnetizzazione, diminuisce di circa un fattore. Inoltre, la componente attiva della corrente dello statore aumenta leggermente. Tutto ciò contribuisce ad aumentare il fattore di potenza del motore.
Sulla fig. 3.16 mostra i grafici delle dipendenze cosφ 1 motore asincrono dal carico quando si collegano gli avvolgimenti dello statore con una stella (curva 1 ) e un triangolo (curva 2).
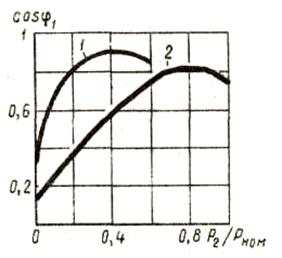
Riso. 3.16. Dipendenza cosφ 1 dal carico quando si collega l'avvolgimento dello statore con una stella (1) e un triangolo (2).
Domande per l'autoesame
1. Spiegare il principio di funzionamento di una macchina asincrona.
2. Descrivere le modalità di funzionamento di una macchina asincrona.
3. Come si chiama lo scorrimento di una macchina asincrona?
4. Annotare le equazioni di tensione per un motore a induzione?
5. Annotare le equazioni di MMF e le correnti del motore a induzione.
6. Disegna i circuiti equivalenti di un motore a induzione.
7. Disegna un diagramma vettoriale di un motore a induzione.
8. Quali perdite esistono in un motore asincrono? Disegna un diagramma di energia per un motore a induzione.
9. Annotare la formula per la coppia elettromagnetica di un motore a induzione.
10. Disegnare un grafico delle caratteristiche meccaniche di un motore a induzione.
11. Come cambiano le caratteristiche meccaniche di un motore asincrono al variare della tensione di rete e della resistenza attiva del rotore?
12. Disegnare le caratteristiche di funzionamento di un motore a induzione.
Caratteristiche prestazionali del motore asincrono
LAVORO IN INGEGNERIA ELETTRICA
"Caratteristiche prestazionali del motore asincrono"
introduzione
Una macchina elettrica asincrona è una macchina elettrica a corrente alternata in cui la velocità del rotore non è uguale alla velocità del campo magnetico dello statore e dipende dal carico. Viene utilizzato principalmente come motore e come generatore. Lo statore ha scanalature in cui è posizionato un avvolgimento monofase o multifase (solitamente trifase), collegato alla rete CA. Questo avvolgimento è progettato per creare un campo magnetico mobile, circolare rotante - per macchine trifase ed ellittico pulsante o rotante - per macchine monofase. Il rotore è una parte rotante di una macchina elettrica, progettata anche per creare un campo magnetico, che, interagendo con il campo dello statore, porta alla creazione di una coppia elettromagnetica che determina la direzione di conversione dell'energia. Per i generatori, questo momento è di natura frenante, contrastando la coppia del motore primo, che mette in moto il rotore. Nei motori, invece, questo momento è trainante, superando la resistenza del meccanismo azionato dal rotore.
Un generatore asincrono è una macchina elettrica asincrona che funziona in modalità generatore. Una fonte ausiliaria di corrente elettrica di bassa potenza e un dispositivo di frenatura (in un azionamento elettrico).
Un motore elettrico asincrono è una macchina elettrica asincrona che funziona in modalità motore. Il più comune motore elettrico asincrono trifase (inventato nel 1889 da MO Dolivo-Dobrovolsky). I motori asincroni sono relativamente semplici nella progettazione e affidabili nel funzionamento, ma hanno una gamma di velocità limitata e un basso fattore di potenza a bassi carichi. Potenza da frazioni di W a decine di MW.
1. Motore asincrono
1.1 Frequenza di rotazione del campo magnetico e del rotore
Permettere n1è la frequenza di rotazione del campo magnetico. Un sistema AC multifase crea un campo magnetico rotante, la cui velocità di rotazione al minuto è n1=60f1/p, dove f1 è la frequenza corrente, p è il numero di coppie polari formate da ciascuna fase dell'avvolgimento dello statore.
n2- frequenza di rotazione del rotore. Se il rotore ruota ad una frequenza no uguale alla frequenza rotazione del campo magnetico (n2≠n1), allora questa frequenza è chiamata asincrona. In un motore asincrono, il flusso di lavoro può essere eseguito solo a una frequenza asincrona.
Durante il funzionamento, la velocità del rotore è sempre inferiore alla velocità del campo.
(n2< n1)
1.2 Il principio di funzionamento di un motore asincrono
Nei motori asincroni, un campo magnetico rotante viene creato da un sistema trifase quando è collegato a una rete in corrente alternata. Il campo magnetico rotante dello statore attraversa i conduttori dell'avvolgimento del rotore e induce fem in essi. Se l'avvolgimento del rotore è chiuso a qualsiasi resistenza o cortocircuitato, sotto l'azione della fem indotta. passaggi correnti. Come risultato dell'interazione della corrente nell'avvolgimento del rotore con una rotazione campo magnetico l'avvolgimento dello statore crea una coppia, sotto l'influenza della quale il rotore inizia a ruotare nella direzione di rotazione del campo magnetico. Per cambiare il senso di rotazione del rotore è necessario scambiare due dei tre fili che collegano l'avvolgimento statorico alla rete rispetto ai terminali di rete.
1.3 Il dispositivo di un motore asincrono
Il nucleo dello statore è reclutato da piastre di acciaio, di 0,35 o 0,5 mm di spessore. Le piastre sono stampate con scanalature e fissate nel telaio del motore. Il letto è installato sulla fondazione. I conduttori del suo avvolgimento sono posati nelle scanalature longitudinali dello statore, che sono interconnesse in modo da formare un sistema trifase. Per collegare gli avvolgimenti dello statore a una rete trifase, possono essere collegati a stella oa triangolo. Ciò consente di accendere il motore in una rete con tensioni diverse. Per tensioni inferiori (220/127 V), l'avvolgimento dello statore è collegato a triangolo, per tensioni più elevate (380/220 V) - a stella. Anche il nucleo del rotore è costituito da piastre di acciaio con uno spessore di 0,5 mm. Le piastre sono stampate con scanalature e assemblate in pacchetti montati sull'albero della macchina. Dai pacchetti è formato un cilindro con scanalature longitudinali, in cui sono posati i conduttori dell'avvolgimento del rotore. A seconda del tipo di avvolgimento del rotore, possono essere macchine asincrone fase e rotore a gabbia di scoiattolo. La resistenza non può essere inclusa in un avvolgimento in cortocircuito. Nell'avvolgimento di fase, i conduttori sono interconnessi, formando un sistema trifase. avvolgimenti tre fasi legati da una stella. L'avvolgimento del rotore può essere cortocircuitato o cortocircuitato. I motori con rotore a gabbia di scoiattolo sono più semplici ed economici, ma i motori con rotore avvolto hanno migliori proprietà di avviamento e regolazione (vengono utilizzati ad alte potenze). La potenza dei motori asincroni varia da diverse decine di watt a 15.000 kW con una tensione dell'avvolgimento dello statore fino a 6 kV. Lo svantaggio dei motori asincroni è il basso fattore di potenza.
1.4 Funzionamento di un motore asincrono sotto carico
n1è la frequenza di rotazione del campo magnetico dello statore. n2- frequenza di rotazione del rotore.
n1 > n2
Il campo magnetico dello statore ruota nella stessa direzione del rotore e scorre rispetto al rotore con una frequenza ns= n1 – n2
Il ritardo del rotore dal campo magnetico rotante dello statore è caratterizzato da scorrimento S= ns / n1, => S = (n1 - n2) / n1
Se il rotore è fermo, allora n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Se il rotore ruota in modo sincrono con il campo magnetico, lo scorrimento S= 0.
Al minimo, cioè in assenza di carico sull'albero motore, lo scorrimento è trascurabile e può essere preso pari a 0. Il carico sull'albero del rotore può essere, ad esempio, una fresa a tornio. Crea coppia frenante. Se la coppia e la coppia frenante sono uguali, il motore funzionerà in modo stabile. Se il carico sull'albero è aumentato, la coppia frenante diventerà maggiore della coppia e della velocità del rotore n2 diminuire. Secondo la formula S =(n1 - n2) / n1 lo slittamento aumenterà. Poiché il campo magnetico dello statore scorre rispetto al rotore con una frequenza ns= n1 - n2, quindi incrocerà più spesso i conduttori del rotore, in essi aumenterà la corrente e la coppia del motore, che presto diventerà uguale alla coppia frenante. Quando il carico diminuisce, la coppia frenante diventa inferiore alla coppia, aumenta n2 e diminuisce S. L'EMF diminuisce e la corrente del rotore e la coppia sono di nuovo uguali al freno. Il flusso magnetico nel traferro della macchina rimane pressoché costante per qualsiasi variazione di carico.
2. Caratteristiche prestazionali del motore asincrono
Le prestazioni di un motore a induzione dipendono
S - scivolare
n2 - velocità del rotore
M - momento sviluppato
I1 consumo di corrente
Potenza assorbita P1
Fattore di potenza COSφ
Dalla potenza utile P2 sull'albero della macchina.
Queste caratteristiche vengono rimosse in condizioni naturali. La frequenza di corrente f1 e la tensione U1 rimangono costanti. Cambia solo il carico sull'albero motore.
All'aumentare del carico sull'albero motore, S aumenta. Quando il motore è al minimo n2≈n1 e S≈0. Al carico nominale, lo scorrimento è tipicamente compreso tra il 3 e il 5%.
Con un aumento del carico sull'albero motore, la velocità di rotazione n2 diminuisce. Tuttavia, la variazione di velocità all'aumentare del carico da 0 a nominale è molto piccola e non supera il 5%. Pertanto, la caratteristica di velocità di un motore a induzione è rigida. La curva ha una pendenza molto piccola rispetto all'asse orizzontale.
Coppia M, sviluppato dal motore, è bilanciato dalla coppia frenante sull'albero mt e momento М0, andando a superare le perdite meccaniche, cioè M \u003d Mt + M0 \u003d P2 /Ω2+ М0, dove P2– potenza utile del motore , Ω 2 - velocità angolare del rotore. Al minimo M= M0. Con un aumento del carico, aumenta anche la coppia e, a causa di una leggera diminuzione della velocità del rotore, l'aumento della coppia avviene più velocemente della potenza utile sull'albero.
La corrente I1 consumata dal motore dalla rete varia in modo non uniforme all'aumentare del carico sull'albero motore. Al minimo, il fattore di potenza COSφ è piccolo. E la corrente ha una grande componente reattiva. A bassi carichi sull'albero motore, la componente attiva della corrente dello statore è inferiore alla componente reattiva, quindi la componente attiva della corrente ha scarso effetto sulla corrente I1. A carichi elevati, la componente attiva della corrente dello statore diventa maggiore di quella reattiva e una variazione del carico provoca una variazione significativa della corrente I1.
La dipendenza grafica della potenza consumata dal motore P1 è rappresentata come una linea quasi retta, leggermente deviata verso l'alto a carichi elevati, il che si spiega con un aumento delle perdite negli avvolgimenti dello statore e del rotore all'aumentare del carico.
La dipendenza del fattore di potenza COSφ dal carico sull'albero motore è la seguente. Al minimo, СOSφ è piccolo, circa 0,2. Poiché la componente attiva della corrente dello statore, a causa delle perdite di potenza nella macchina, è piccola rispetto alla componente reattiva di questa corrente, che crea un flusso magnetico. Con un aumento del carico sull'albero, СOSφ aumenta, raggiungendo il valore massimo di 0,8–0,9, a seguito di un aumento del componente attivo della corrente dello statore. A carichi molto elevati, si verifica una leggera diminuzione di COSφ, poiché a causa di un aumento significativo dello scorrimento e della frequenza della corrente nel rotore, aumenta la reattanza dell'avvolgimento del rotore.
La curva di efficienza η ha la stessa forma di qualsiasi macchina o trasformatore. Al minimo, efficienza = 0. Con un aumento del carico sull'albero motore, l'efficienza aumenta notevolmente e quindi diminuisce. L'efficienza raggiunge il suo valore più alto a un tale carico, quando le perdite di potenza nell'acciaio e le perdite meccaniche, che non dipendono dal carico, sono uguali alle perdite di potenza negli avvolgimenti dello statore e del rotore, che dipendono dal carico.
Abstract simili:
Varietà di micromotori esecutivi asincroni: con rotore cavo amagnetico e magnetico; con un avvolgimento in corto circuito come una ruota di scoiattolo. Schema di un solco semichiuso del circuito magnetico. Creazione di un campo magnetico rotante da parte di uno statore bifase.
Il dispositivo di una macchina asincrona trifase, i suoi elementi principali, le modalità e il principio di funzionamento, la storia di creazione e applicazione su stadio attuale. La procedura e le condizioni per ottenere un campo magnetico rotante. La dipendenza della coppia elettromagnetica dallo scorrimento.
Determinazione del momento d'inerzia totale del riduttore, dell'argano e del carico ridotto all'albero motore. Calcolo del momento di resistenza ridotto al pozzo durante la salita, la discesa. Il valore della potenza sull'albero del cambio. Il motivo della differenza di potenza durante il sollevamento e l'abbassamento del carico.
Calcolo e progetto del motore, scelta delle dimensioni principali, calcolo dell'avvolgimento statorico. Calcolo delle dimensioni della zona del dente dello statore e scelta del traferro. Modellazione del motore nell'ambiente MatLab Power System Blockset e con parametri della modalità nominale.
Protezione principale e di riserva del turbogeneratore.
Dispositivo e immagine condizionale di sincrono macchina trifase. La posizione dei poli del campo magnetico dello statore e del rotore. Dipendenza della coppia elettromagnetica di una macchina sincrona dall'angolo. circuito di commutazione di un motore sincrono durante la frenatura dinamica.
Informazione Generale di macchine asincrone(a due avvolgimenti macchine elettriche corrente alternata). Progettazione di parti attive, gruppi di cuscinetti, dispositivo di input del micromotore asincrono 4АА50В2, principio del suo funzionamento, campi di applicazione e significato.
Progettazione di un motore elettrico asincrono trifase con rotore a gabbia di scoiattolo. Scelta dell'analogo del motore, dimensioni, configurazione, materiale del circuito magnetico. Determinazione del coefficiente di avvolgimento statorico, calcolo meccanico dell'albero e dei cuscinetti volventi.
Calcolo di un motore asincrono con rotore a gabbia. Scelta delle dimensioni principali. Calcolo delle dimensioni della zona del dente dello statore e del traferro, del rotore, della corrente di magnetizzazione. Parametri della modalità di funzionamento. Calcolo delle perdite, caratteristiche operative e di avviamento.
Informazioni generali sulle macchine asincrone. Informazioni generali sulle modalità di funzionamento di un motore asincrono. Definizione analitica e grafica delle modalità di funzionamento di una macchina di ricostruzione asincrona.
Caratteristiche dello sviluppo di un motore elettrico asincrono con rotore a gabbia di scoiattolo tipo 4А160S4У3 basato su una macchina generalizzata. Calcolo del modello matematico di un motore asincrono sotto forma di Cauchy 5. Adeguatezza del modello di avviamento diretto di un motore asincrono.
Metodo per il calcolo del circuito magnetico generatore sincrono, la scelta delle sue dimensioni e configurazione, la costruzione delle caratteristiche della magnetizzazione della macchina. Determinazione dei parametri di avvolgimento, esecuzione dei calcoli termici e di ventilazione, disegno di montaggio del generatore.
Inammissibilità del multiplo avvio asincrono motore sincrono, che porta a una significativa caduta di tensione nel sistema di alimentazione, al verificarsi di forze dinamiche significative nelle parti frontali dell'avvolgimento dello statore e all'invecchiamento termico dell'isolamento.
Costruzione del diagramma di carico dell'attuatore. La scelta degli elementi del circuito di potenza. Calcolo delle caratteristiche meccaniche. Valutare la necessità di un feedback di velocità. Determinazione dell'efficienza media del sistema. Processi transitori nell'unità.
Informazioni generali sui dispositivi regolazione automatica eccitazione di macchine sincrone. Fattori che influenzano la tensione e il circuito di alimentazione. Dispositivo di composizione attuale: modifiche necessarie nelle caratteristiche di una macchina di composizione.
Circuito magnetico del motore. Dimensioni, configurazione, materiale. Nucleo dello statore, rotore e polo. Calcolo del circuito magnetico. Traferro, denti e dorso dello statore. Attivo e reattanza induttiva avvolgimenti dello statore per stato stazionario.
LAVORO IN INGEGNERIA ELETTRICA
"Caratteristiche prestazionali del motore asincrono"
introduzione
Una macchina elettrica asincrona è una macchina elettrica a corrente alternata in cui la velocità del rotore non è uguale alla velocità del campo magnetico dello statore e dipende dal carico. Viene utilizzato principalmente come motore e come generatore. Lo statore ha scanalature in cui è posizionato un avvolgimento monofase o multifase (solitamente trifase), collegato alla rete CA. Questo avvolgimento è progettato per creare un campo magnetico mobile, circolare rotante - per macchine trifase ed ellittico pulsante o rotante - per macchine monofase. Il rotore è una parte rotante di una macchina elettrica, progettata anche per creare un campo magnetico, che, interagendo con il campo dello statore, porta alla creazione di una coppia elettromagnetica che determina la direzione di conversione dell'energia. Per i generatori, questo momento è di natura frenante, contrastando la coppia del motore primo, che mette in moto il rotore. Nei motori, invece, questo momento è trainante, superando la resistenza del meccanismo azionato dal rotore.
Un generatore asincrono è una macchina elettrica asincrona che funziona in modalità generatore. Fonte ausiliaria corrente elettrica dispositivo di bassa potenza e frenante (nell'azionamento elettrico).
Un motore elettrico asincrono è una macchina elettrica asincrona che funziona in modalità motore. Il più comune motore elettrico asincrono trifase (inventato nel 1889 da MO Dolivo-Dobrovolsky). Motori asincroni sono caratterizzati da relativa semplicità di progettazione e affidabilità di funzionamento, tuttavia hanno una gamma di velocità limitata e un basso fattore di potenza a carichi leggeri. Potenza da frazioni di W a decine di MW.
1. Motore asincrono
1.1 Frequenza di rotazione del campo magnetico e del rotore
Permettere n 1 è la frequenza di rotazione del campo magnetico. Un sistema AC multifase crea un campo magnetico rotante, la cui velocità di rotazione al minuto è n1=60f1/p, dove f1 è la frequenza corrente, p è il numero di coppie polari formate da ciascuna fase dell'avvolgimento dello statore.
n 2 - frequenza di rotazione del rotore. Se il rotore ruota con una frequenza non uguale alla frequenza di rotazione del campo magnetico (n2≠n1), allora questa frequenza è chiamata asincrona. In un motore asincrono, il flusso di lavoro può essere eseguito solo a una frequenza asincrona.
Durante il funzionamento, la velocità del rotore è sempre inferiore alla velocità del campo.
( n 2< n 1)
1.2 Il principio di funzionamento di un motore asincrono
Nei motori asincroni, un campo magnetico rotante viene creato da un sistema trifase quando è collegato a una rete in corrente alternata. Il campo magnetico rotante dello statore attraversa i conduttori dell'avvolgimento del rotore e induce fem in essi. Se l'avvolgimento del rotore è chiuso a qualsiasi resistenza o cortocircuitato, sotto l'azione della fem indotta. passaggi correnti. Come risultato dell'interazione della corrente nell'avvolgimento del rotore con il campo magnetico rotante dell'avvolgimento dello statore, viene creata una coppia, sotto l'influenza della quale il rotore inizia a ruotare nella direzione di rotazione del campo magnetico. Per cambiare il senso di rotazione del rotore è necessario scambiare due dei tre fili che collegano l'avvolgimento statorico alla rete rispetto ai terminali di rete.
1.3 Il dispositivo di un motore asincrono
Il nucleo dello statore è reclutato da piastre di acciaio, di 0,35 o 0,5 mm di spessore. Le piastre sono stampate con scanalature e fissate nel telaio del motore. Il letto è installato sulla fondazione. I conduttori del suo avvolgimento sono posati nelle scanalature longitudinali dello statore, che sono interconnesse in modo da formare un sistema trifase. Per collegare gli avvolgimenti dello statore rete trifase possono essere collegati a stella oa triangolo. Ciò consente di accendere il motore in una rete con tensioni diverse. Per tensioni inferiori (220/127 V), l'avvolgimento dello statore è collegato a triangolo, per tensioni più elevate (380/220 V) - a stella. Anche il nucleo del rotore è costituito da piastre di acciaio con uno spessore di 0,5 mm. Le piastre sono stampate con scanalature e assemblate in pacchetti montati sull'albero della macchina. Dai pacchetti è formato un cilindro con scanalature longitudinali, in cui sono posati i conduttori dell'avvolgimento del rotore. A seconda del tipo di avvolgimento del rotore macchine asincrone potrebbe essere con fase e cortocircuitato rotore. La resistenza non può essere inclusa in un avvolgimento in cortocircuito. Nell'avvolgimento di fase, i conduttori sono interconnessi, formando un sistema trifase. Gli avvolgimenti delle tre fasi sono collegati da una stella. L'avvolgimento del rotore può essere cortocircuitato o cortocircuitato. I motori con rotore a gabbia di scoiattolo sono più semplici ed economici, ma i motori con rotore avvolto hanno migliori proprietà di avviamento e regolazione (vengono utilizzati ad alte potenze). La potenza dei motori asincroni varia da diverse decine di watt a 15.000 kW con una tensione dell'avvolgimento dello statore fino a 6 kV. Lo svantaggio dei motori asincroni è il basso fattore di potenza.
1.4 Funzionamento di un motore asincrono sotto carico
n 1 è la frequenza di rotazione del campo magnetico dello statore. n 2 - frequenza di rotazione del rotore.
n 1 > n 2
Il campo magnetico dello statore ruota nella stessa direzione del rotore e scorre rispetto al rotore con una frequenza n S = n 1 – n 2
Il ritardo del rotore dal campo magnetico rotante dello statore è caratterizzato da scorrimento S = n S / n 1, => S = ( n 1 – n 2) / n 1
Se il rotore è fermo, allora n 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1
Se il rotore ruota in modo sincrono con il campo magnetico, lo scorrimento S= 0.
Al minimo, cioè in assenza di carico sull'albero motore, lo scorrimento è trascurabile e può essere preso pari a 0. Il carico sull'albero del rotore può essere, ad esempio, una fresa tornio. Crea coppia frenante. Se la coppia e la coppia frenante sono uguali, il motore funzionerà in modo stabile. Se il carico sull'albero è aumentato, la coppia frenante diventerà maggiore della coppia e della velocità del rotore n 2 diminuire. Secondo la formula S = ( n 1 – n 2) / n 1 lo slittamento aumenterà. Poiché il campo magnetico dello statore scorre rispetto al rotore con una frequenza n S = n 1 – n 2, quindi incrocerà più spesso i conduttori del rotore, in essi aumenterà la corrente e la coppia del motore, che presto diventerà uguale alla coppia frenante. Quando il carico diminuisce, la coppia frenante diventa inferiore alla coppia, aumenta n 2 e diminuisce S . L'EMF diminuisce e la corrente del rotore e la coppia sono di nuovo uguali al freno. Il flusso magnetico nel traferro della macchina rimane pressoché costante per qualsiasi variazione di carico.
2. Caratteristiche prestazionali del motore asincrono
Le prestazioni di un motore a induzione dipendono
S - scivolare
n2 - velocità del rotore
M - momento sviluppato
I1 consumo di corrente
Potenza assorbita P1
Fattore di potenza COSφ
Dalla potenza utile P2 sull'albero della macchina.
Queste caratteristiche vengono rimosse in condizioni naturali. La frequenza di corrente f1 e la tensione U1 rimangono costanti. Cambia solo il carico sull'albero motore.
All'aumentare del carico sull'albero motore, S aumenta. Quando il motore è al minimo n2≈n1 e S≈0. Al carico nominale, lo scorrimento è tipicamente compreso tra il 3 e il 5%.
Con un aumento del carico sull'albero motore, la velocità di rotazione n2 diminuisce. Tuttavia, la variazione di velocità all'aumentare del carico da 0 a nominale è molto piccola e non supera il 5%. Pertanto, la caratteristica di velocità di un motore a induzione è rigida. La curva ha una pendenza molto piccola rispetto all'asse orizzontale.
Coppia M, sviluppato dal motore, è bilanciato dalla coppia frenante sull'albero mt e momento M 0 , andando a superare le perdite meccaniche, cioè M= Mt + M 0 =P 2 /Ω 2 + M 0 , dove R 2 – potenza utile del motore , Ω 2 - velocità angolare del rotore. Al minimo M=M 0. Con un aumento del carico, aumenta anche la coppia e, a causa di una leggera diminuzione della velocità del rotore, l'aumento della coppia avviene più velocemente della potenza utile sull'albero.
La corrente I1 consumata dal motore dalla rete varia in modo non uniforme all'aumentare del carico sull'albero motore. Al minimo, il fattore di potenza COSφ è piccolo. E la corrente ha una grande componente reattiva. A bassi carichi sull'albero motore, la componente attiva della corrente dello statore è inferiore alla componente reattiva, quindi la componente attiva della corrente ha scarso effetto sulla corrente I1. A carichi elevati, la componente attiva della corrente dello statore diventa maggiore di quella reattiva e una variazione del carico provoca una variazione significativa della corrente I1.
La dipendenza grafica della potenza consumata dal motore P1 è rappresentata come una linea quasi retta, leggermente deviata verso l'alto a carichi elevati, il che si spiega con un aumento delle perdite negli avvolgimenti dello statore e del rotore all'aumentare del carico.
La dipendenza del fattore di potenza COSφ dal carico sull'albero motore è la seguente. Al minimo, СOSφ è piccolo, circa 0,2. Poiché la componente attiva della corrente dello statore, a causa delle perdite di potenza nella macchina, è piccola rispetto alla componente reattiva di questa corrente, che crea un flusso magnetico. Con un aumento del carico sull'albero, СOSφ aumenta, raggiungendo il valore massimo di 0,8–0,9, a seguito di un aumento del componente attivo della corrente dello statore. A carichi molto elevati, si verifica una leggera diminuzione di COSφ, poiché a causa di un aumento significativo dello scorrimento e della frequenza della corrente nel rotore, aumenta la reattanza dell'avvolgimento del rotore.
La curva di efficienza η ha la stessa forma di qualsiasi macchina o trasformatore. Al minimo, efficienza = 0. Con un aumento del carico sull'albero motore, l'efficienza aumenta notevolmente e quindi diminuisce. Il massimo valore L'efficienza si raggiunge a un tale carico, quando le perdite di potenza nell'acciaio e le perdite meccaniche, che non dipendono dal carico, sono uguali alle perdite di potenza negli avvolgimenti dello statore e del rotore, che dipendono dal carico.
Momento elettromagnetico
.
Completare potenza meccanica motore
viene creato come risultato della rotazione del rotore con una velocità angolare ω 2 sotto l'azione del momento M em i.e.
P fur \u003d M em ω 2 (2,19)
Questa potenza può essere determinata dal circuito equivalente come energia elettrica, che spicca sulla resistenza di carico condizionale R pure", moltiplicata per il numero delle fasi dello statore:
P pelliccia = m 1 (I 2 ") 2 R 2 " (1-s) / s (2,20)
Sulla base di (2.19) e (2.20), tenendo conto (2.8), possiamo scrivere
M em \u003d (m 1 (I 2 ") 2 R 2 " / s) / ω 1 (2,21)
Quando si calcola il momento secondo la formula (2.21), la corrente io 2"è determinato dal circuito equivalente (Fig. 2.10) per lo scorrimento corrispondente.
La formula (2.21) può essere trasformata sostituendo in essa l'espressione della corrente io 2", ottenuto sotto determinate ipotesi dal circuito equivalente
M em \u003d (m 1 U 1 R 2 "/s) / ω 1 ((R 1 + CR 2 / s) 2 + (x 1 + Cx 2 ") 2) (2,22)
Coefficiente C, che entra nella formula (2.22), è il modulo coefficiente complesso DA
= 1 + (z 1 /z m) che compare durante la trasformazione. L'ipotesi è di prendere in considerazione solo il modulo del coefficiente DA
, perché il suo argomento nelle macchine reali è molto piccolo. In macchine reali (escluse le micromacchine) DA
= 1,03–1,08 e alle analisi qualitativa a volte prendi DA
=
1.
L'espressione (2.21) può anche essere trasformata esprimendo la caduta di tensione attiva nel rotore I 2 "R 2" / s tramite EMF in base alle formule (2.15) e (2.16)
I 2 "R 2" /s \u003d E 2 "cos ψ 2 (2,23)
Sostituendo la (2.23) nella (2.21) ed effettuando le trasformazioni, tenendo conto della (2.18) e della (2.12), otteniamo
M em \u003d k F m I 2 "cos ψ 2 (2,24)
dove K- fattore costruttivo.
Come si può vedere dalla (2.24), il momento elettromagnetico è direttamente proporzionale al flusso magnetico principale Fm e il componente attivo della corrente del rotore io 2" cos ψ 2.
Le formule di coppia (2.21), (2.22) e (2.24) si ottengono per la modalità motore, ma sono valide anche per altre modalità, tenendo conto del segno e dell'intervallo dei valori di scorrimento S. La dipendenza della coppia elettromagnetica dallo scorrimento è presentata graficamente in fig. 2.11 (linea continua).
Questo tipo di caratteristica è facilmente spiegabile usando le formule (2.24), (2.15) e (2.16). All'aumentare dello scorrimento, la corrente del rotore io 2 aumenta continuamente, ma diventa sempre più induttivo - diminuisce cos ψ 2 all'aumentare della frequenza delle correnti nel rotore e, di conseguenza, della sua resistenza induttiva. Di conseguenza, la componente attiva della corrente del rotore e, di conseguenza, la coppia elettromagnetica prima aumentano e poi iniziano a diminuire.
Lo scorrimento in cui l'istante raggiunge il valore massimo M max è detto critico ed è indicato con scr. Per determinare scr, è necessario, usando l'espressione (2.22), prendere la derivata dM em /ds e equiparalo a zero. La soluzione dell'equazione risultante ha la forma
s cr \u003d ±C R 2 " / √ (R 1 " + 2) (2,25)
Prendendo in prima approssimazione C 1 ≈ 1 e R 1 ≈ 0, otteniamo
s cr = ±R 2 " /(x 1+x 2") (2.26)
La maggior parte dei motori a induzione richiede un'elevata efficienza. Pertanto, la resistenza attiva degli avvolgimenti, in particolare R 2 , che determina il livello delle perdite elettriche nel rotore, tende ad essere piccola. In questo caso, lo scorrimento critico si trova nell'intervallo .
Sostituiamo la (2.25) nella (2.22) e otteniamo l'espressione per il momento massimo:
M max = ± m 1 U 1 2 /2 ω 1 C [± R 1 + √(R 1 2 +(x 1 + Cx 2) 2)] (2.27)
Il segno "+" si riferisce alla modalità motore, "-" - alla modalità generatore.
Come puoi vedere, il momento massimo è proporzionale al quadrato tensione di alimentazione, non dipende dalla resistenza attiva del circuito del rotore R2 e si verifica con lo scorrimento maggiore, maggiore è la resistenza attiva del circuito del rotore (Fig. 2.11, linea tratteggiata, R2B >R2A).
Coppia di spunto motore M pagè determinato dall'espressione (2.22) for s=1. Significato M pag proporzionale al quadrato della tensione di alimentazione e aumenta all'aumentare R2(vedi Fig. 2.11), raggiungendo un massimo a s cr =1.
Lo scorrimento nominale snom, corrispondente alla coppia nominale Mnom, aumenta all'aumentare di R 2 . Ciò è accompagnato da un aumento delle perdite elettriche nel circuito del rotore e da una diminuzione dell'efficienza. Per motori asincroni con scorrimento critico basso, S nom = 0,02 - 0,06.
Equazione di equilibrio dei momenti sull'albero motore.
Il momento elettromagnetico sviluppato dal motore supera il momento di carico M n applicato all'albero motore e il momento di resistenza del motore M 0 (coppia al minimo), determinato da perdite meccaniche e aggiuntive nel motore. Il momento risultante determina il valore e il segno dell'accelerazione del rotore:
dω / dt \u003d (M em - M 0 - M n) / J (2,28)
Dove J- il momento d'inerzia delle parti rotanti - il rotore e il carico.
Questa è un'equazione differenziale del moto di un azionamento elettrico, costituito da un motore e un carico, convertito nella forma
M em \u003d M 0 + M n + J (dω / dt) (2,29)
chiamato l'equazione di equilibrio dei momenti sull'albero motore.
In questa equazione:
M 0 + M n \u003d M st- momento di resistenza statico,
J(dω/dt)= M dinè il momento dinamico di resistenza.
Momento elettromagnetico Mah momento meno M0 chiamato utile o coppia sull'albero e denota M2. Dalle equazioni (2.28) e (2.29) segue che:
1) se Mah = Mst, poi dω/dt = 0, ω
= const cioè il motore funziona in una modalità a regime (statico), mentre M2 = M n;
2) se Mah> Mst, quindi la velocità angolare del rotore aumenta, cioè il motore funziona in modalità transitoria (dinamica);
3) se Mah< Mst, quindi la velocità angolare del rotore diminuisce, cioè il motore funziona in modalità transitoria.
A caso generale Quando si compila l'equazione per l'equilibrio dei momenti, si dovrebbero prendere in considerazione i segni dei momenti, che sono determinati dalla direzione di azione dei momenti rispetto al senso di rotazione positivo. Se il motore genera una coppia elettromagnetica che agisce in direzione positiva, la coppia è considerata positiva ( Mah> 0). Se il motore entra in modalità di frenatura, la sua coppia inizia ad agire nella direzione opposta ( Mah< 0).
I momenti di resistenza statici creati dal meccanismo di lavoro e dal dispositivo di trasmissione sono di due tipi: reattivi e attivi. I momenti di resistenza reattivi sono sempre diretti contro il senso di rotazione, cioè sono inibitori ( Mst< 0). К реактивным
моментам относятся моменты сил трения, в том числе в самом двигателе, моменты
сопротивления при резании металла на обрабатывающих станках и т.д. Активный момент
всегда действует в одном и том же направлении, независимо от направления вращения,
т.е. может либо препятствовать движению (Mst> 0) o contribuire ad esso ( Mst< 0). К активным
моментам относятся моменты сил тяжести, сил упругости пружин и т.д.
Caratteristiche meccaniche.
L'equazione della caratteristica meccanica naturale di un motore a induzione è l'espressione (2.21) o (2.22) con lo scorrimento S sostituito dalla velocità angolare ω 2 secondo (2.8) per U 1 = cost. Il grafico caratteristico è mostrato in fig. 2.12, a.

Fig.2.12
Valutiamo le caratteristiche meccaniche in termini di stabilità, rigidità e linearità.
Si considera che il motore in un azionamento aperto funzioni stabilmente se, dopo la rimozione del disturbo, ritorna automaticamente al punto di funzionamento iniziale sulla caratteristica meccanica. Caratteristica meccanica motore è la dipendenza della velocità angolare del rotore dalla coppia elettromagnetica: ω 2 \u003d f (M em).La caratteristica meccanica del carico è la dipendenza del momento resistente statico sull'albero motore dalla velocità angolare: M st \u003d f (ω 2).
Teoricamente, il funzionamento in regime stazionario del motore è possibile in alcuni punti A 1 e A 2, dove Mah=M st.A. Far girare il motore con un carico M st.A \u003d cost al punto A 1 e compare una perturbazione che porta ad un aumento della velocità angolare??. Il motore genera quindi una coppia corrispondente al punto A 1", e il carico è il momento di resistenza corrispondente al punto A 1. in cui Mah<Mst, secondo l'equazione di equilibrio del momento, la velocità angolare ω 2 diminuisce e il motore torna al punto A 1. Torna al punto A 1 avverrà anche con un incremento negativo di velocità (punto A 1""). Se il motore è in funzione con il carico al punto A 2, quindi con un disturbo che porta ad un aumento di velocità, il motore crea una coppia corrispondente al punto A 2", e il carico è il momento di resistenza corrispondente al punto A 2. in cui Mah>Mst e la velocità angolare continua ad aumentare, il motore si allontana dal punto A 2. Torna al punto A 2 non si verifica nemmeno con un incremento negativo di velocità (punto A 2""). In questo caso, la velocità continuerà a diminuire fino all'arresto del motore.
Pertanto, al punto A 1 il motore funziona costantemente, e al punto A 2- instabile. Nel caso generale, un segno formale di funzionamento stabile del motore è la disuguaglianza
(dM em /dω 2)< (dM ст /dω 2) (2.30)
Con un momento di carico che non dipende dalla velocità, ad es. a M st \u003d cons t, questa disuguaglianza assume la forma
(dω 2 /dM em)< 0 (2.31)
Sulla base del concetto di stabilità del motore in una trasmissione aperta, è consuetudine chiamare stabile la caratteristica meccanica del motore se garantisce un funzionamento stabile del motore a M st \u003d cost.
Se utilizziamo il criterio di stabilità formale (2.31), allora è facile dimostrarlo per M st \u003d cost il funzionamento stabile del motore è assicurato solo nell'area da ω 1 prima ω 2cr. Trama da ω 2cr fino a 0 è instabile. Il campo di funzionamento delle coppie e delle velocità degli azionamenti elettrici con motori asincroni è selezionato all'interno della parte stabile delle caratteristiche meccaniche del motore. Punto di carico nominale M nomè posizionato sull'area di lavoro in modo tale che la capacità di sovraccarico K m \u003d M max / M nom \u003d 1,7 -3,5. Con bassa resistenza del rotore R2 velocità critica ω 2cr \u003d (0,8 - 0,9) ω 1 e l'area di lavoro è dura. La caratteristica meccanica è generalmente non lineare, ma la sua area di lavoro è prossima alla lineare.
All'interno dell'area di lavoro, il motore si autoregola. L'aumento del momento di resistenza sull'albero motore da M st.v prima M st.s porta ad una diminuzione della velocità angolare del rotore da ω 2v prima ω 2s, un aumento dell'EMF e della corrente indotta nel rotore da un campo rotante e, di conseguenza, un aumento del momento elettromagnetico ad un valore pari al nuovo valore del momento di resistenza (transizione dal punto A Esattamente DA sulla caratteristica meccanica).
Caratteristiche operative
.
Le caratteristiche prestazionali di un motore a induzione dipendono dalla velocità angolare del rotore ω 2, momento utile M2, efficienza η
, fattore di potenza cos φ 1(φ 1- sfasamento tra U 1 e io 1) e la corrente dello statore io 1 dalla potenza utile P2 a U 1 = Un nom e f1 = f nom(Fig. 2.12, b). Le caratteristiche prestazionali possono essere prese sperimentalmente o calcolate utilizzando un circuito equivalente.
Quando si passa da x.x. (il motore non è caricato) alla modalità di carico nominale, la velocità angolare del rotore diminuisce leggermente, perché ω 2 \u003d (1 - s) ω 1, un S nom, come notato, è unità di percentuale. Di conseguenza, un momento utile M 2 \u003d P 2 / ω 2 aumenta secondo una legge prossima al lineare. La variazione della corrente dello statore è determinata dalla risposta del rotore; il valore relativamente elevato della corrente al minimo è dovuto alla presenza di un traferro. Attuale xx per lo più induttivo e corrispondentemente basso cos φ 10- circa 0,1 - 0,2. All'aumentare del carico, la potenza elettrica attiva consumata aumenta e cos φ 1 cresce - il suo valore massimo raggiunge 0,7 - 0,9. La corrente mantiene un carattere induttivo attivo ( φ 1>0) e la rete di alimentazione viene caricata con corrente reattiva. Efficienza del motore η \u003d R 2 / R 1, dove R 1- potenza elettrica attiva consumata dal motore. Con potenza simmetrica P 1 \u003d m 1 U 1 I 1 cos φ 1, dove U 1, io 1– tensione e corrente di fase. Dipendenza dell'efficienza dalla potenza P 2 \u003d P 1 -Δp e -Δp m -Δp pelliccia ha lo stesso aspetto del trasformatore, perché nel motore, anche le perdite sono divise in perdite fisse e variabili. Per macchine di piccola e media potenza, il massimo valore di efficienza η
= 0,7 - 0,9, mentre valori inferiori si riferiscono a motori di potenza inferiore, che hanno una resistenza attiva degli avvolgimenti relativamente maggiore.
Ti consigliamo di leggere
, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito
Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito Mele al forno con ricotta Mele al forno con ricotta
Mele al forno con ricotta Mele al forno con ricotta

