In molti casi, i motori asincroni trifase vengono utilizzati per azionamenti che non richiedono il controllo della velocità. Ma i motori asincroni hanno vantaggi preziosi: affidabilità, basso costo, design semplice, alta efficienza e peso relativamente basso. Per questi motivi, viene naturale provare ad applicarli anche ai variatori di velocità.
Abbiamo bisogno di informazioni più specifiche su quale sia il risultato finale desiderato. marchio; Ci sono diversi modi per velocizzare il tuo motore trifase. Un rimedio meno invasivo sarebbe quello di aggiungere un convertitore di frequenza, a volte chiamato convertitore di velocità. Tenere presente che all'aumentare della velocità, la coppia diminuisce se si supera la velocità nominale del motore. Saremo lieti di aiutarti a determinare quale di questi approcci è il migliore per la tua applicazione. Se il tuo motore ha un interruttore centrifugo nel circuito di avviamento, non puoi aumentare molto la velocità del motore.
- Questa è una domanda abbastanza generale.
- Se avete bisogno Informazioni aggiuntive, Per favore chiamaci.
Per controllare la velocità dei motori asincroni con un rotore a gabbia di scoiattolo, viene solitamente utilizzato il metodo di controllo della frequenza, che è un controllo della velocità regolare campo magnetico regolando la frequenza della corrente negli avvolgimenti dello statore e il metodo per modificare il numero di coppie di poli di un campo magnetico rotante, in cui la frequenza di rotazione del campo magnetico cambia bruscamente.
Il problema sarà con il motore elettrico che gira molto basso a 300 giri / min? Anche l'altitudine alla quale si fa funzionare il motore è importante, poiché l'aria ad altitudini più elevate è meno densa e quindi non fornisce lo stesso effetto di raffreddamento. Nelle zone montuose può essere necessario ridurre il carico anche a pieno regime per garantire un sufficiente raffreddamento del motore. Le specifiche della tua applicazione richiederanno molto probabilmente l'uso di un motore ad alta efficienza e di una ventola a velocità costante. Il costo di una ventola ausiliaria dipenderà dalle dimensioni del telaio del motore e potrebbe anche richiedere un po' di fabbricazione per capire come montarlo. Grazie per ogni consiglio che puoi darmi!
Per controllare la velocità di rotazione dei motori asincroni con un rotore di fase, viene utilizzato il metodo del controllo reostatico, che è un controllo regolare dello scorrimento del rotore modificando la resistenza attiva dei suoi avvolgimenti di fase.
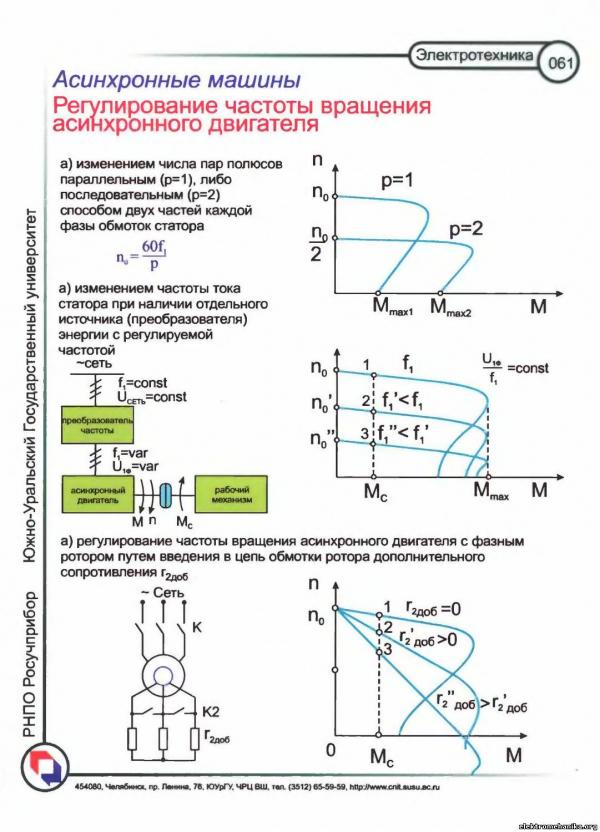
Regolazione della frequenza. Il metodo più promettente per il controllo della velocità motore a induzioneè controllo della frequenza AC dello statore motore. Velocità angolare del campo rotante n = 2 f/r. Pertanto, quando la frequenza corrente f cambia, la velocità angolare del campo cambia proporzionalmente. Tuttavia, quando si esegue il controllo della frequenza della corrente, è necessario tenere conto del fatto che è necessario il controllo simultaneo della tensione. Ciò è dovuto al fatto che, secondo l'espressione (14.10), l'EMF della fase, e quindi la tensione di alimentazione, sono proporzionali alla frequenza e alla portata della corrente. Poiché il flusso deve rimanere lo stesso in tutte le modalità, la tensione deve essere (senza tener conto delle cadute di tensione nella macchina) proporzionale alla frequenza. Inoltre, ciò è necessario affinché quando la velocità del motore cambia, la sua coppia non cambi.
multipunto motore monofase non è in realtà un motore a più velocità, è un motore a più tensioni. Quando si utilizzano prese di avvolgimento per aumentare la resistenza del circuito, il motore si indebolisce e il carico fa rallentare il motore. Rimuovere il carico e il motore funzionerà alla stessa velocità indipendentemente dalla gru selezionata. Se il motore viene utilizzato come motore del ventilatore, è possibile aggiungere un reostato alla linea di ingresso aggiungendo una resistenza esterna e smorzando il motore per ottenere la velocità desiderata. Se preferisci velocità specifiche piuttosto che una gamma di velocità, puoi aggiungere misure di resistenza del campione e dell'aria. Tieni presente che se il tuo carico di lavoro cambia, cambia anche la tua velocità. Possiamo cambiare il polo del motore a induzione trifase?
Per valutare la natura della dipendenza della coppia dalla frequenza della corrente negli avvolgimenti dello statore e dalla tensione su di esso, trascuriamo nell'equazione (14.28) la resistenza attiva dell'avvolgimento dello statore g l e reattanze induttive dispersione degli avvolgimenti statorici x pac 1 e rotore x ras 2 e utilizzare l'espressione per la frequenza di scorrimento (14.13):
mons= = A,
Per favore, dimmi le conseguenze. Sì, puoi riavvolgere l'avvolgimento per cambiare i poli magnetici, ma così facendo dovrai cambiare alcune altre caratteristiche dell'avvolgimento. Per aumentare il numero di poli, è necessario modificare la gamma, la dimensione del filo e le spire per bobina per mantenere la densità del flusso magnetico del ferro posteriore e del dente a standard normali. Mantenendo lo stesso numero di giri si indebolisce il motore, riducendo la sua capacità di produrre coppia. Motore a induzione con rotore a gabbia di scoiattolo crea un grande generatore quando si muove al di sopra della sua velocità sincrona.
dove MA= cost.
Pertanto, al variare della frequenza della corrente, per mantenere costante la coppia, è necessario variare proporzionalmente la tensione sullo statore; in altre parole, sarà la condizione per mantenere una coppia motore costante durante il controllo di frequenza U 1 /f= cost. Se si regola la frequenza della corrente e della tensione, osservando la condizione specificata, le caratteristiche meccaniche del motore rimarranno rigide e momento massimo quasi indipendente dalla frequenza (diminuisce significativamente solo a un ritmo relativo basse frequenze). Allo stesso tempo, la potenza cambierà in proporzione alla frequenza della corrente, poiché P2 = M vr. Ad esempio, quando la frequenza della corrente viene ridotta di un fattore 2, anche la potenza del motore sull'albero viene dimezzata.
Le stesse caratteristiche che rendono questo motore desiderabile rispetto ad altri tipi di motori rendono il generatore a induzione desiderabile rispetto ad altri tipi di generatori, vale a dire la forza intrinseca del design del telaio dello scoiattolo e la semplicità dei sistemi di controllo.
Un motore a induzione diventa un generatore quando è collegato alla rete e quindi azionato al di sopra della sua velocità sincrona da un motore primo. Il primo motore potrebbe essere una turbina, un motore, un mulino a vento o qualsiasi cosa in grado di fornire la coppia e la velocità necessarie per portare il motore in uno stato di velocità eccessiva.
Regolamento modificando il numero di paia di pali. Un cambiamento graduale della velocità angolare di un motore a induzione su un ampio intervallo è fattibile a costo di complicare e aumentare il costo della progettazione di un motore a induzione: questa è la regolazione commutando il numero di coppie di poli del motore.
A una frequenza di rete costante, la velocità angolare di un campo rotante dipende solo dal numero di coppie polari di questo campo, determinato dall'avvolgimento dello statore. Se due avvolgimenti separati sono posizionati sullo statore, uno si forma R vapore, e l'altro, formando R" coppie di poli, quindi, inserendo nella rete il primo o il secondo avvolgimento, otterremo la frequenza di rotazione del campo:
Le prestazioni come generatore saranno leggermente diverse da quelle utilizzate come motore. Le differenze possono essere così piccole che non possono essere rilevate dai metodi di misurazione sul campo convenzionali. Il principale vantaggio del generatore a induzione è la regolazione della frequenza. La velocità deve essere controllata generatore sincrono in modo che la sua frequenza non si discosti dalla frequenza lineare. La frequenza di uscita e i volt sono controllati dal sistema di alimentazione nei generatori a induzione e sono indipendenti dalle variazioni di velocità.
N 1 \u003d 60f / p o n" 1 = 60 f/p", Di conseguenza,
n1/p" 1 =p"/p,
anche le velocità del rotore del motore varieranno di conseguenza. In questo caso, l'avvolgimento del rotore del motore deve essere realizzato come una ruota di scoiattolo.
Il numero di poli degli avvolgimenti dello statore in questo caso non è correlato e può essere scelto qualsiasi, a seconda delle condizioni di funzionamento del motore. La regolazione stessa si riduce ad una brusca variazione della frequenza di rotazione del campo motore. Ma la velocità del rotore non può cambiare bruscamente a causa dell'inerzia dell'intero sistema di azionamento elettrico. Solo dopo la commutazione inizia la corrispondente modifica della velocità del rotore.
L'effetto autoregolante riduce al minimo la complessità del sistema di controllo. I regolatori del generatore a induzione sono molto simili a quelli utilizzati per un motore a induzione, con poche eccezioni. In caso di perdita di carico elettrico, la coppia del motore primo accelererà rapidamente il sistema a velocità potenzialmente pericolose. È necessario un freno, un regolatore o un acceleratore per prevenire velocità pericolose. Interruttore elettrico deve essere attrezzato per limitare la corrente corto circuito. In caso di cortocircuito nel sistema di alimentazione, il generatore fornisce una corrente di guasto. Solitamente fusibili limitatori di corrente. La coppia del motore primo deve essere limitata per evitare il sovraccarico del generatore. Questo controllo può essere correlato al progetto del motore primo o può essere basato su segnali di feedback dall'uscita del generatore. In un caso estremo, il motore primo può spingere la coppia del generatore, provocando una velocità di fuga. In alcuni casi, la velocità del motore primo può scendere al di sotto della velocità sincrona del generatore. Se ciò accade, il generatore sarà azionato per far funzionare il sistema. Se una tale risposta è indesiderabile, è possibile interrompere l'alimentazione con un relè di inversione dell'alimentazione oppure è possibile utilizzare una frizione di sovraccarico per consentire al motore di funzionare senza carico. Il sistema deve essere dotato di un limitatore di velocità. . Un generatore a induzione può essere utilizzato come motore per accelerare il sistema alla velocità operativa, oppure un motore primo può essere utilizzato per fornire accelerazione.
Per mostrare più chiaramente questo processo transitorio, costruiamo due caratteristiche meccaniche macchina asincrona con un numero variabile di coppie polari: una caratteristica corrispondente a R coppie di poli e il secondo p" = 1 p coppie di poli (rispettivamente, Fig. 14.31, un e b). Assumiamo che il momento sull'albero motore rimanga costante al variare della velocità del campo. Con un aumento di quest'ultimo, cioè con il passaggio da R" a R coppie di poli, il motore si trova prima in condizioni prossime all'avviamento e si verifica un aumento di corrente.
In quest'ultimo caso, non è necessario tenere conto del momento di avviamento e della corrente nella progettazione della macchina. Ciò consente al progettista di ottenere le massime prestazioni a pieno carico. Il generatore a induzione viene sempre più utilizzato come mezzo per recuperare energia che altrimenti andrebbe sprecata. L'energia generata può essere consumata in loco o venduta al sistema di utilità che fornisce il sito. Per convertire questa energia in energia elettrica vengono utilizzati generatori eolici e idrici.
Alcune applicazioni tipiche dei generatori ad induzione. In caso di mancanza di vapore, il generatore può essere utilizzato come motore per azionare la pompa. Inoltre, la pompa impedirà al sistema di raggiungere una velocità eccessiva in caso di perdita di carico elettrico. L'azienda idrica ritiene di poter acquistare elettricità a prezzi bassi durante la notte e vendere elettricità a prezzi elevati durante il periodo di punta durante il giorno. Costruisce serbatoi di stoccaggio bassi e alti e installa diverse pompe. Di notte, pompa l'acqua dalla piscina bassa alla piscina alta, acquistando elettricità dall'utenza. Durante i periodi di punta, l'acqua rifluisce attraverso le pompe, azionando i motori come generatori. L'energia viene venduta ai servizi di pubblica utilità. Questo circuito è così semplice che può essere controllato a distanza. Il vento soffia costantemente tra il deserto e le montagne della California. Un uomo intraprendente ha creato diverse torri con mulini a vento che controllano i generatori a induzione tramite riduttori. L'energia viene generata in proporzione alla velocità del vento e venduta a un'azienda locale. L'uso indiscriminato di motori a induzione come generatori dovrebbe essere evitato. È possibile che un particolare motore non funzioni bene come generatore a causa della saturazione magnetica interna. Stress interno come generatore può essere superiore a un motore con la stessa tensione ai terminali. Le densità magnetiche in una macchina sono determinate dalla tensione nel traferro equivalente. È finita alta tensione nel traferro può portare a un'eccessiva saturazione della macchina, nonché a elevate perdite nel nucleo e maggiori correnti di magnetizzazione. Si può presumere che la macchina possa surriscaldarsi a carico molto basso. Se un motore a induzione viene utilizzato come generatore, queste informazioni devono essere note al progettista in modo che possa tener conto delle densità magnetiche. I motori a induzione sono generalmente classificati a 460 volt per l'uso su un sistema a 480 volt. I generatori a induzione devono essere classificati per la tensione nominale del sistema o leggermente superiore, non inferiore, poiché il generatore è ora la fonte di alimentazione e non il carico sul sistema di alimentazione. I condensatori di rifasamento possono essere utilizzati per correggere il fattore di potenza di un generatore allo stesso modo di un motore a induzione. Tuttavia, se c'è la possibilità che il generatore possa raggiungere una velocità eccessiva, indipendentemente dal fatto che sia collegato alla rete elettrica o meno, i condensatori devono essere collegati al sistema tramite un interruttore separato in modo che quando l'interruttore del generatore viene aperto, i condensatori non saranno collegato al generatore. In condizioni di velocità eccessiva, i condensatori possono sovraccaricare il generatore e causare un'alta tensione incontrollata. Queste tensioni possono distruggere i sistemi di isolamento del generatore e possono anche essere pericolose per altre apparecchiature e personale. La cartiera ha una scorta significativa di combustibile disponibile in corteccia e rottami. . I generatori a induzione sono progettati per applicazioni specifiche e non per uso generale.
Ma quando ci si sposta da R a R", cioè con una diminuzione della frequenza di rotazione del campo, la macchina si trova prima nelle condizioni di una modalità generatore e lavora, dando energia alla rete.
Questa modalità viene talvolta utilizzata per una frenata rapida ed economica dell'azionamento.
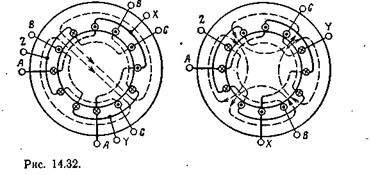
Due avvolgimenti separati sono forniti agli statori solo per motori di bassa potenza; per motori ad alta potenza è più opportuno commutare bobine dello stesso avvolgimento per ottenere un diverso numero di coppie polari. Sulla fig. 14.32 mostra il circuito di commutazione avvolgimento trifase da due a quattro poli. La commutazione dell'avvolgimento in un rapporto diverso da 1:2 richiede un cambio di circuito più complesso ed è meno comune.
Si prega di contattare il distributore locale o il rappresentante di vendita per inviare una richiesta tecnica. Solo chi conosce le differenze può già scegliere il metodo di controllo giusto durante la progettazione di un azionamento, mantenendo così i costi il più bassi possibile.
Quando si progetta un sistema di azionamento elettrico, è fondamentale determinare i requisiti di precisione per il controllo dell'applicazione. Se i requisiti sono trasparenti e specificati, il sistema di azionamento può essere compilato e adattato con i componenti necessari. L'obiettivo principale è selezionare i componenti giusti con requisiti di qualità di controllo specifici in modo ottimizzato in termini di costi: questo è l'unico modo per evitare spese generali inutili se, ad esempio, i requisiti sono stati valutati troppo alti o troppo bassi.
Nella maggior parte dei casi, lo statore di una macchina asincrona viene fornito con due avvolgimenti indipendenti, ciascuno dei quali è commutato in un rapporto di 1: 2 o altro. Pertanto, il motore ha quattro livelli di velocità, ad esempio 3000, > 1500, 1000 e 500 giri/min.
Regolazione reostatica. Nei motori asincroni trifase con rotore di fase viene utilizzato un metodo reostatico per controllare la velocità del rotore. Ciò si ottiene introducendo un reostato trifase regolabile nel circuito degli avvolgimenti di fase del rotore, come quando si avvia il motore (Fig. 14.24). Ma questo reostato deve essere progettato per un carico a lungo termine dalla corrente del rotore e non per un carico a breve termine, come un reostato di avviamento. Un aumento della resistenza attiva del circuito del rotore cambia la caratteristica M(s) - lo rende più morbido (vedi fig. 14.25). Se, a coppia costante sull'albero motore, la resistenza attiva del circuito del rotore viene aumentata aumentando gradualmente la resistenza del reostato (r p1< rp2< r р3), то рабочая точка будет смещаться с одной кривой SM) al successivo, corrispondente all'aumentata resistenza del circuito del rotore (Fig. 14.25, punti 1-4), in base al quale lo slittamento aumenterà e, di conseguenza, il regime del motore diminuirà.
In questo modo è possibile modificare la velocità del rotore nell'intervallo da nominale a punto fermo. Ma con questo metodo di regolazione sono inevitabili perdite di energia relativamente grandi (vedi § 14.11). Potenza di campo rotante Rvr, pag senza tener conto delle perdite di energia nel nucleo statorico, è costituita (vedi Fig. 14.20) dalle perdite di potenza nei conduttori dell'avvolgimento del rotore (vedi circuito equivalente in Fig. 14.19);
R pr2 \u003d r "in2 (I" 2) 2
P fur \u003d r "in 2 (I" 2) 2.
Atteggiamento
R pr 2 / R mech \u003d s / (l -s) \u003d (n 1 - n)/n
mostra che dividendo la potenza meccanica diminuisce in proporzione diretta alla diminuzione della velocità del rotore, allo stesso tempo aumenta di conseguenza la proporzione delle perdite di potenza nella resistenza attiva del circuito del rotore. Pertanto, per ridurre ad esempio del 25% il regime del motore, è necessario inserire nel circuito del rotore un reostato con tale resistenza attiva, in cui un quarto dell'energia del campo magnetico rotante verrà inutilmente convertito in calore. Lo svantaggio di tale regolazione può anche essere il fatto che l'inclusione di un reostato nel circuito del rotore rende caratteristica meccanica il motore è più morbido, quindi riduce la stabilità della sua velocità. Quando il reostato è acceso, piccole variazioni del carico sull'albero provocano variazioni significative della velocità del motore.
Ci sono posizioni negli impianti elettrici in cui non puoi fare a meno di un motore CC. È questo motore elettrico che può essere regolato in base alla velocità di rotazione del rotore, richiesta negli impianti elettrici. È vero, ha molte carenze e una di queste è la rapida usura delle spazzole se sono state installate con una curvatura e la loro durata è piuttosto bassa. Se indossato, si verificano scintille, quindi un tale motore non può essere utilizzato in ambienti esplosivi e polverosi. Più un motore elettrico corrente continua costa caro. Per modificare questa situazione, utilizzare un motore asincrono e un controller di frequenza per un motore asincrono.
Sotto quasi tutti gli aspetti, i motori elettrici funzionanti in corrente alternata sono superiori agli analoghi in corrente continua. In primo luogo, sono più affidabili. In secondo luogo, hanno dimensioni e peso inferiori. In terzo luogo, il prezzo è più basso. In quarto luogo, sono più facili da usare e da collegare.
Ma hanno uno svantaggio: questa è la complessità della regolazione della velocità. In questo caso, i metodi standard per controllare la frequenza dei motori asincroni non funzioneranno qui, vale a dire, modificare la tensione, impostare la resistenza e così via. Il controllo della frequenza di un motore elettrico asincrono era il problema numero uno. Anche se le basi teoriche sono note fin dagli anni Trenta del secolo scorso. Tutto si riduceva al costo. convertitore di frequenza. Tutto è cambiato quando sono stati inventati i microcircuiti, con l'aiuto dei quali, attraverso i transistor, è stato possibile assemblare un convertitore di frequenza con un costo minimo.
Principio normativo
Quindi, il modo per controllare la velocità di un motore a induzione si basa su una formula. Eccola qui sotto.
ω=2πf/p, dove
- ω è la velocità angolare di rotazione dello statore;
- f è la frequenza della tensione di ingresso;
- p è il numero di coppie di poli.
Cioè, si scopre che è possibile modificare la velocità di rotazione del motore elettrico solo modificando la frequenza della tensione. Cosa dà in pratica? Il primo è il buon funzionamento del motore, soprattutto all'avvio dell'attrezzatura, quando il motore stesso funziona con i carichi più elevati. Il secondo è maggiore slittamento. A causa di ciò, l'efficienza aumenta e la perdita di caratteristiche di potenza diminuisce.
La struttura del regolatore di frequenza
Tutti i moderni convertitori di frequenza sono costruiti sul principio della cosiddetta doppia conversione. Questo è, corrente alternata viene convertito in CC attraverso un raddrizzatore e un filtro non controllati. Inoltre, tramite un inverter a impulsi (è trifase), avviene la conversione inversa della corrente continua in corrente alternata. L'inverter stesso è costituito da sei interruttori di alimentazione (transistor). Quindi, ogni avvolgimento del motore elettrico è collegato a determinate chiavi del raddrizzatore (positivo o negativo). È l'inverter che cambia la frequenza della tensione applicata agli avvolgimenti dello statore. Infatti è attraverso di essa che avviene la regolazione della frequenza del motore elettrico.

In questo dispositivo, i transistor di potenza sono installati all'uscita. Agiscono come chiavi. Se li confrontiamo con i tiristori, va notato che i primi generano un segnale sotto forma di sinusoide. È questa forma che crea una distorsione minima.
Ora il principio stesso di funzionamento del convertitore di frequenza. Per capirlo, proponiamo di smontare la figura seguente.
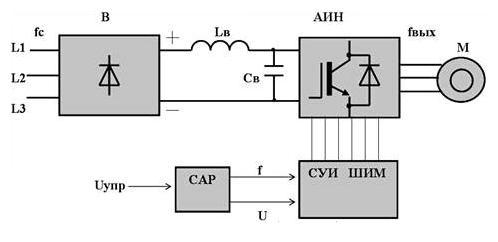
Quindi, esaminiamo l'immagine, dove
- "B" è un raddrizzatore di potenza di tipo a diodo non controllato.
- "AIN" è un inverter autonomo.
- "SUI PWM" - un sistema di controllo della larghezza di impulso.
- "SAR" - sistema di controllo automatico.
- "Sv" - condensatore di filtro.
- "Lv" - acceleratore.
Il diagramma mostra molto chiaramente che l'inverter regola la frequenza della tensione grazie al sistema di controllo dell'ampiezza dell'impulso (è ad alta frequenza). È questa parte del regolatore che è responsabile del collegamento degli avvolgimenti dello statore del motore elettrico alternativamente al polo positivo del raddrizzatore, quindi al negativo. La frequenza di connessione ai poli avviene lungo una curva sinusoidale. In questo caso, la frequenza degli impulsi è determinata esattamente dalla frequenza PWM. Ecco come funziona la regolazione della frequenza.
Ti consigliamo di leggere
 Caratteristiche psicologiche dei bambini in adolescenza
Caratteristiche psicologiche dei bambini in adolescenza Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola
Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa

