Per la quantità di coppia motore a induzione lo sfasamento tra la corrente I 2 ed e ha una grande influenza. ds Rotore E 2S.
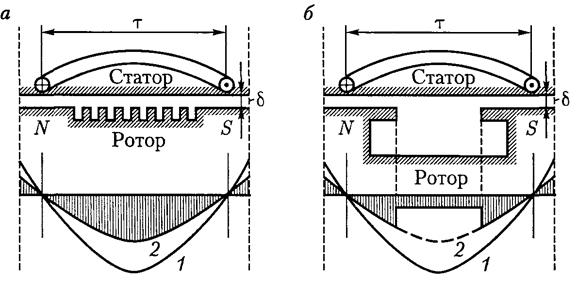
Considera il caso in cui l'induttanza dell'avvolgimento del rotore è piccola e quindi lo sfasamento può essere trascurato (Fig. 223, a).
Il campo magnetico rotante dello statore è qui sostituito dal campo dei poli N e S, ruotanti, diciamo, in senso orario. Usando la regola della mano destra, determiniamo la direzione e. ds e le correnti nell'avvolgimento del rotore. Le correnti del rotore, interagendo con il campo magnetico rotante, creano una coppia. Le direzioni delle forze che agiscono sui conduttori percorsi da corrente sono determinate dalla regola della mano sinistra. Come si può vedere dal disegno, il rotore sotto l'azione delle forze ruoterà nella stessa direzione del campo rotante stesso, cioè in senso orario.
E l'armatura è anche un gruppo laminato, solitamente situato su un albero. Interruttore magnetico della spazzola a spirale Fig. Un singolo avvolgimento è installato tra i poli opposti di un semplice magnete. Quando la bobina è allineata verticalmente, il normale flusso di elettroni va dal terminale positivo a quello negativo. L'avanzamento è effettuato da spazzole che sono a contatto con i segmenti. interruttore. Dalla legge dell'induzione elettromagnetica di Faraday - la regola della mano sinistra. la parte superiore della bobina sarà soggetta a una forza da destra a sinistra.
Considera il secondo caso, quando l'induttanza dell'avvolgimento del rotore è grande. In questo caso, lo sfasamento tra la corrente del rotore I 2 ed e. ds anche il rotore E 2S sarà grande. Nella FIG. 223, b, il campo magnetico dello statore di un motore a induzione è ancora mostrato sotto forma di poli rotanti in senso orario N e S. La direzione di e. ds rimane lo stesso di Fig. 223, a, ma a causa del ritardo della corrente in fase, l'asse campo magnetico il rotore non coinciderà più con la linea neutra del campo dello statore, ma si sposterà di un certo angolo contro la rotazione del campo magnetico. Ciò porterà al fatto che insieme alla formazione di una coppia diretta in una direzione, alcuni conduttori creeranno una coppia opposta.
La parte inferiore sarà soggetta a forza nella direzione opposta. Poiché la bobina è progettata per ruotare, queste forze creeranno una coppia che farà ruotare la bobina in senso antiorario. Il ruolo dell'interruttore è garantire il flusso di elettroni. sempre nella giusta direzione poiché ogni lato della bobina segna i tuoi pali. L'interruttore include segmenti di bronzo separati da fogli isolanti per zanzare. Le spazzole di carbone entrano in contatto con un interruttore.
Angolo di rotazione Variazione della coppia durante la rotazione. Se si utilizzano due giri di 90° insieme a due magneti separati anch'essi a 90°, allora la coppia in uscita è praticamente costante. Introducendo una seconda bobina, il commutatore necessita di quattro segmenti separati.
Da ciò si può vedere che la coppia totale del motore durante uno sfasamento tra corrente ed e. ds il rotore è più piccolo rispetto al caso in cui I 2 e E 2S sono in fase. Si può dimostrare che la coppia di un motore a induzione è determinata solo dalla componente attiva della corrente del rotore, cioè la corrente I 2 cos e che può essere calcolata con la formula:
La perdita totale attraverso l'interruttore è dovuta sia all'attrito meccanico che allo stress della mano. Tuttavia, entrambe le perdite sono piccole se il motore è dotato di ventola. Motori Sincroni I motori sincroni sono così chiamati perché funzionano ad un'unica velocità, cioè la velocità di rotazione del campo magnetico. Può essere eseguita la produzione di un campo magnetico rotante. utilizzando tre bobine statoriche distanziate di 120° alimentate da corrente trifase. La velocità di rotazione del campo dipende dalla frequenza della corrente.
Il progetto meccanico è schematizzato in fig. Caratteristica di coppia per un motore sincrono. Il campo magnetico rotante indotto dalle bobine dello statore e del rotore, che può essere paragonato a un magnete permanente a barra allineato con il singolo flusso rotante prodotto nello statore. Quando l'albero viene azionato meccanicamente, il campo generato dal rotore viene rimosso dall'allineamento con il campo generato dallo statore. Caratteristiche motori sincroni solitamente presentati come variazioni. Si può vedere dall'equazione sopra che i motori sincroni non hanno una coppia di avviamento e il rotore deve essere ruotato alla velocità sincrona con altri mezzi.
Ф m - flusso magnetico dello statore (e anche approssimativamente uguale al flusso magnetico risultante del motore a induzione);
Angolo di fase tra e. ds e corrente di fase dell'avvolgimento
C è un coefficiente costante.
Dopo la sostituzione:
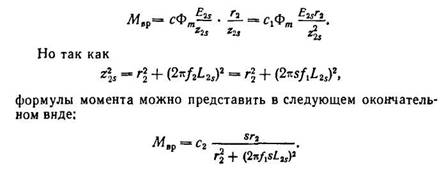
Dall'ultima espressione si può vedere che la coppia del motore a induzione dipende dallo scorrimento.
I vantaggi di un motore sincrono sono la facilità con cui è possibile controllare il fattore di potenza. velocità di rotazione costante, indipendentemente dal carico applicato. Motori a induzione Il motore a induzione dello statore assomiglia a un generatore corrente alternata e, se l'auto è guidata dalla corrente, produce un flusso magnetico rotante. Il rotore può essere a gabbia o con collettori rotanti.
Rappresentazione schematica di un motore asincrono. In un telaio motore, il rotore è laminato ei conduttori hanno barre di rame nude o nude. l'alluminio viene alimentato attraverso le fessure del rotore. Le aste sono saldate a ciascuna estremità con anelli o piastre per realizzare fasci di fili corti. La macchina scorrevole ha un'anima laminata e avvolgimento trifase, simile a uno statore, ed è collegato a tre anelli sull'albero. Viene mostrato uno schema di un motore a induzione con tre bobine dello statore distanziate di 120 ° l'una dall'altra.
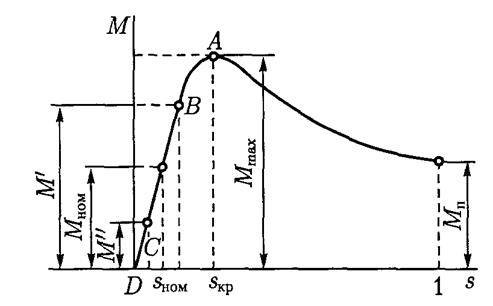
Nella FIG. 224 mostra la curva A della coppia del motore rispetto allo scorrimento. Si può vedere dalla curva che al momento dell'avviamento, quando s=l e n = 0, la coppia del motore è piccola. Ciò è spiegato dal fatto che al momento dell'avviamento, la frequenza della corrente nell'avvolgimento del rotore è la più alta e la resistenza induttiva dell'avvolgimento è elevata. Di conseguenza, cos ha un valore piccolo (perché
Se le bobine dello statore sono alimentate da una corrente trifase, nello statore viene creato un campo magnetico rotante. La figura mostra una singola bobina del rotore. A riposo, il campo rotante indurrà una tensione nella campana del rotore al variare del flusso. Se la bobina forma un anello chiuso, la forza EMF indotta indurrà una corrente nella bobina. La forza risultante sul conduttore attraverso il quale passa la corrente risulterà in un momento, che sarà. accelerare il rotore. La velocità del rotore aumenterà fino a quando la coppia elettromagnetica non sarà bilanciata. al momento del carico meccanico.
|
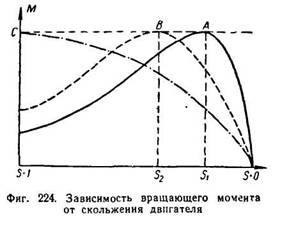
riga 0.1-0.2). Pertanto, sebbene la corrente di avviamento sia elevata, la coppia di avviamento sarà piccola.
Con qualche scorrimento S 1, la coppia del motore avrà un valore massimo. Con un'ulteriore diminuzione dello slittamento, o, in altre parole, con un ulteriore aumento della velocità di rotazione del motore, la sua coppia diminuirà rapidamente.
Un motore a induzione non raggiungerà mai la velocità sincrona, poiché si tratterebbe di un movimento relativo tra il rotore e il campo rotante delle bobine, e ciò non indurrebbe forze EMF elettromagnetiche nelle bobine del rotore e quindi nessuna coppia elettromagnetica. Pertanto, i motori a induzione funzionano sempre a una velocità leggermente inferiore alla velocità sincrona.
La funzione coppia-coppia è mostrata in figura. Coppia a pieno carico Coppia di scorrimento Fig. Caratteristica di coppia per un motore asincrono. Quando la velocità del rotore è uguale a sincrono, = 0, la coppia è zero. Se la velocità del rotore scende al di sotto del sincronismo, la coppia aumenta in modo approssimativamente lineare fino a un valore massimo determinato dal tempo di carico totale e richiede perdite eccessive attraverso il rotore. Un motore a induzione può essere considerato una macchina a velocità costante. In effetti, la difficoltà di cambiare la velocità è una. svantaggio di un motore asincrono.
Per barcollare e quando si fa scorrere s = 0, anche la coppia del motore sarà uguale a zero.
Si noti che in un motore asincrono uno scorrimento pari a zero non può praticamente esistere. Ciò è possibile solo se il rotore è alimentato esternamente con una coppia nel senso di rotazione del campo statorico.
La coppia di avviamento può essere aumentata se, al momento dell'avviamento, si riduce lo sfasamento tra corrente ed e. ds rotore. Dalla formula
Problemi con i motori asincroni. avviamento motore, freno motore, controllo velocità. Può anche essere pensato come una versione discreta e sincrona del motore. Il numero di passi effettuati deve corrispondere al numero di impulsi di controllo applicati alle fasi del motore. La rotazione viene effettivamente eseguita con un passo temporale finito.
Quando vengono applicate le fasi dello statore, vengono generati campi magnetici che interagiscono con i flussi dei magneti permanenti, creando forze di coppia che muovono il rotore. L'alimentazione di fase viene eseguita utilizzando impulsi di polarità. interleaved, che complica la struttura del dispositivo di controllo, chiamato comando bipolare.
si può vedere che se, con una resistenza induttiva costante dell'avvolgimento del rotore, si aumenta la resistenza attiva, allora l'angolo stesso diminuirà, il che porterà al fatto che aumenterà anche la coppia del motore. Viene utilizzato in pratica per aumentare la coppia di spunto del motore. Al momento dell'avviamento viene introdotta nel circuito del rotore una resistenza attiva (reostato di avviamento) che viene poi rimossa non appena il motore aumenta di giri.
Questo tipo di motore fornisce coppie motore più elevate e coppia per mantenere il rotore anche in assenza di alimentazione di fase. Il rotore è costituito da un magnete cilindrico magnetizzato assialmente. Il passo angolare varia da 0,9 a -5°, ma il più comunemente usato è 1,8°.
Definizione ed elementi costruttivi. Su una macchina a induzione convenzionale, il campo magnetico è creato da variabili correnti elettriche. Viene chiamato l'avvolgimento di queste correnti avvolgimento primario, che può essere monofase o multifase. Le macchine monofase sono costruite per basse potenze fino a pochi kilowatt. Le macchine convenzionali sono trifase.
Aumentando la coppia di spunto si ottiene la coppia massima del motore con più scorrimento (punto S 2 della curva B di FIG. 224). Aumentando la resistenza attiva del circuito del rotore all'avviamento, è possibile ottenere che la coppia massima sarà al momento dell'avviamento (s = 1 curva C).
La coppia di un motore a induzione è proporzionale al quadrato della tensione, quindi anche una piccola diminuzione della tensione è accompagnata da una brusca diminuzione della coppia.
La seconda parte attiva dell'auto è il luogo in cui si trova l'avvolgimento secondario. Di norma, la parte fissa della macchina funge da induttore e il rotore è indotto. La macchina a induzione convenzionale è costruita in due forme: macchine a induzione con rotori ad anello o rotori di avvolgimento, in cui un avvolgimento di rotore alternato multifase è collegato a collettori rotanti, e macchine a induzione con uno o più rotori.
La macchina ad induzione multifase può funzionare come motore, generatore o freno elettromagnetico. È utilizzato nella massima misura come motore ed è il motore elettrico più comune per le sue eccezionali qualità, semplicità strutturale e funzionamento sicuro.
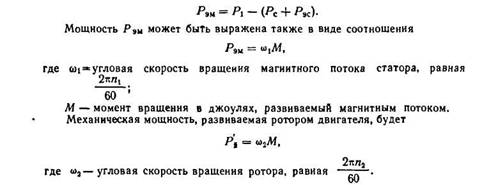
La potenza P 1 fornita all'avvolgimento statorico di un motore asincrono è pari a:
![]()
dove m 1 è il numero di fasi.
Lo statore del motore presenta le seguenti perdite di energia:
1) nell'avvolgimento statorico R es. =m 1 io 1 2 r 1 ;
2) nell'acciaio dello statore e nell'isteresi e nelle correnti parassite P C .
La potenza fornita al rotore è la potenza del campo magnetico rotante, detta anche potenza elettromagnetica P eM .
La macchina ad induzione è costruita per tensioni fino a 10 kV, potenza da pochi watt a decine di megawatt e da diverse centinaia a centomila giri al minuto. Le dimensioni nominali sono indicate sulla targa del veicolo. Il ferro attivo è una macchina ad induzione che ha una parte fissa, uno statore, dotata di un mono o corrente trifase, così come la parte mobile, il rotore.
La figura 1 mostra un motore asincrono con un albero motore smontato. Nella FIG. 2 mostra una sezione longitudinale di un motore asincrono a bobina con rotore a bobina provvisto di gabbia di scoiattolo e dispositivo di sollevamento delle spazzole sugli anelli collettori. La macchina a induzione ha un ferro costante, che viene preso il meno possibile e determinato da considerazioni meccaniche. La boccola ha valori da 0,2 a 2 mm, valori piccoli corrispondenti a macchine con una potenza dell'ordine dei watt, e valori grandi per macchine potenti con condizioni operative gravose.
La potenza elettromagnetica è pari alla differenza tra la potenza fornita al motore e le perdite nello statore del motore, cioè
|
La differenza tra Р eM e rappresenta le perdite elettriche nell'avvolgimento del rotore Р eP, se trascuriamo le perdite nell'acciaio del rotore a causa della loro insignificanza (la frequenza di rimagnetizzazione del rotore è solitamente molto piccola):
Auto ordinarie con la potenza di un carro e auto grandi e potenti con condizioni di lavoro gravose. Le creste sono semichiuse. Su macchine con alta tensione vengono utilizzati solo slot aperti, dove le bobine sono realizzate separatamente. Le macchine ad induzione vengono utilizzate quasi esclusivamente in bobine ea due strati per ottenere il meno possibile un campo magnetico con un contenuto armonico più elevato. Gli avvolgimenti dello statore in due strati sono spesso realizzati con un passo corto e i rotori rotanti a due strati con un passo diametrale.
L'avvolgimento in gabbie di piccole e medie dimensioni viene spesso eseguito con rotori a passo corto ea passo diametrale a doppio strato. Il trasporto su veicoli di piccole e medie dimensioni viene effettuato su larga scala in alluminio sotto pressione, oltre che in rame, bronzo o ottone.
Pertanto, le perdite nell'avvolgimento del rotore sono proporzionali allo scorrimento del rotore.
Se da potenza meccanica sviluppate dal rotore, sottrarre le perdite meccaniche R mx dovute all'attrito nei cuscinetti del rotore, all'attrito sull'aria, ecc., nonché le perdite aggiuntive R D derivanti sotto carico e dovute ai campi vaganti del rotore e le perdite causate da: pulsazioni del campo magnetico nei denti dello statore e nel rotore, allora ci sarà potenza utile sull'albero motore, che indicheremo con P 2 .
I rotori dell'albero motore sono più semplici, più resistenti ed economici degli anelli ad anello, quindi quando non sono richieste velocità di avviamento e modifiche speciali, sono ampiamente utilizzati in applicazioni di potenza medio-bassa. Per ridurre il rumore si utilizzano cave convenzionali con le maggiori pendenze possibili e inclinate verso i generatori e, nel caso di micromacchine, si utilizzano esecuzioni speciali, come rotori senza cave, costituiti da più strati radiali, assiali o tangenziali, motori di isteresi e tamburo motori rotativi sagomati.
L'efficienza di un motore a induzione può essere determinata dalla formula:

Dall'ultima espressione si può vedere che il momento di rotazione di un motore a induzione è proporzionale al prodotto della grandezza del flusso magnetico rotante, la corrente del rotore e il coseno dell'angolo tra e. ds rotore e la sua corrente,
La forma dell'auto dipende dal tipo di costruzione dell'auto. In generale, i veicoli di potenza medio-bassa hanno camme montate sullo scudo, come mostrato nelle figure, mentre i veicoli di grandi dimensioni hanno statori separati collegati a una piastra di base comune. Le auto piccole e medie di solito hanno i cuscinetti, mentre quelle grandi hanno quelli scorrevoli. Quando si utilizza la scorrevolezza, i cuscinetti a strisciamento vengono utilizzati anche per le auto di piccole dimensioni.
Ghisa e acciaio sono usati come materiale di colata. Gli acciai vengono utilizzati sia normalmente che quando sono destinati a ridurre il peso di un veicolo. Le macchine fino a 4 kW sono spesso dotate di alloggiamenti in alluminio. La macchina a induzione funziona in modalità generatore, motore o freno rispetto alla velocità del rotore del rotore rispetto al campo magnetico sincrono del campo magnetico inverso. Quando l'energia elettromagnetica entra nel rotore e lavora meccanicamente all'aria aperta, si verifica la modalità motore.

Dal circuito equivalente di un motore asincrono si ricava il valore della corrente rotorica ridotta, che diamo senza dimostrazione.
![]()
Viene chiamata la dipendenza graficamente espressa del momento elettromagnetico dallo scorrimento caratteristica meccanica motore a induzione (Fig. 3.3).
Riso. 3.3. Caratteristiche meccaniche del motore asincrono
Per costruire è possibile utilizzare una formula semplificata per il calcolo della coppia elettromagnetica di un motore a induzione (formula di Kloss). caratteristiche meccaniche

In questo caso, lo scorrimento critico è determinato dalla formula
![]()
dove λ m \u003d M max / M nom - capacità di sovraccarico del motore.
Nel calcolare la caratteristica meccanica, si tenga presente che con valori di scorrimento superiori al valore critico, l'accuratezza dei calcoli diminuisce drasticamente. Ciò è dovuto a un cambiamento nei parametri del circuito equivalente di un motore asincrono, causato dalla saturazione magnetica dei denti dello statore e del rotore, e da un aumento della frequenza della corrente nell'avvolgimento del rotore.
La forma delle caratteristiche meccaniche di un motore a induzione dipende in gran parte dall'entità della tensione applicata all'avvolgimento dello statore U 1 (Fig. 3.4) e la resistenza attiva dell'avvolgimento del rotore R"2 (figura 3.5).

Riso. 3.4. Influenza della tensione U 1 sulle caratteristiche meccaniche del motore asincrono
I dati forniti nei cataloghi per i motori asincroni di solito non contengono informazioni sui parametri del circuito equivalente, il che rende difficile l'applicazione di formule per il calcolo della coppia elettromagnetica. Pertanto, per calcolare il momento elettromagnetico, viene spesso utilizzata la formula

Riso. 3.5. Influenza della resistenza R" 2 sulle caratteristiche meccaniche del motore asincrono
Le proprietà operative di un motore asincrono sono determinate dalle sue caratteristiche prestazionali: la dipendenza dalla velocità di rotazione N 2, coppia dell'albero M 2, efficienza e fattore di potenza cosφ 1 dal carico utile del motore R 2 .
Quando si calcolano i parametri per determinare le prestazioni dei motori a induzione, viene utilizzato un metodo grafico basato sulla costruzione di un grafico a torta o un metodo analitico.
La base per l'esecuzione di uno qualsiasi dei metodi di calcolo delle prestazioni sono i risultati dei test di circuito aperto e cortocircuito. Se il motore è progettato, questi dati vengono ottenuti nel processo di calcolo.
Quando si calcola la resistenza dei resistori R ext, utilizzato nei circuiti dello statore o del rotore di fase per limitare la corrente di avviamento o il controllo della velocità, utilizzare il principio: per questo particolare motore asincrono, scorrimento S proporzionale alla resistenza attiva del circuito del rotore di questo motore. In accordo con questo, l'uguaglianza
(r 2 + r est) /S= r2/s nome,
Dove r2- resistenza attiva dell'avvolgimento rotorico stesso alla temperatura di esercizio; S- scivolare quando un resistore viene inserito nel circuito del rotore con una resistenza R est.
Da questa espressione si ricava una formula per il calcolo della resistenza attiva del resistore addizionale g a 6, necessaria per ottenere un dato scorrimento maggiorato S a un dato carico (nominale):
R est = R 2 (s/s nom - 1).
Esistono due metodi per calcolare i reostati iniziali: grafico e analitico.
Metodo grafico più accurato, ma richiede la costruzione di una caratteristica meccanica naturale e di un diagramma di partenza del motore, a cui è associata una grande quantità di lavoro grafico.
Metodo analitico il calcolo dei reostati di partenza è più semplice, ma meno accurato. Ciò è dovuto al fatto che il metodo si basa sull'assunzione di rettilineità della sezione di lavoro della caratteristica meccanica naturale di un motore asincrono. Ma quando lo scorrimento è prossimo al critico, questa ipotesi provoca un errore notevole, che è tanto più significativo quanto più vicina è la coppia di spunto iniziale M 1 alla coppia massima M mah. Pertanto, il metodo analitico di calcolo è applicabile solo per i valori della coppia iniziale di spunto M 1 < 0.7 M mah .
La resistenza dei resistori nelle fasi del reostato di avviamento:
terzo R est3 = R 2 (λ m - 1);
secondo R est2 = R add3 λ m;
Primo R est1 = R aggiungi2 λ m,
Dove R 2 - resistenza attiva dell'avvolgimento di fase del rotore del motore a induzione,
Dove E 2 e IO 2nom - dati di catalogo per la dimensione del motore selezionata.
La resistenza del reostato di partenza sui suoi passi:
prima R PR1 = R est1 + R est2 + R est3 ;
secondo R PR2 = R est2 + R est3
terzo R PR2 = R est3 .
Per limitare la corrente di avviamento dei motori asincroni con rotore a gabbia di scoiattolo applicare circuiti speciali per la loro inclusione con elementi che limitano la corrente di avviamento. Tutti questi metodi si basano sulla riduzione della tensione applicata all'avvolgimento dello statore. I circuiti più utilizzati con l'inclusione di resistori o induttanze nei fili lineari dello statore (vedi Fig. 3.14, B).Il calcolo della resistenza richiesta di questi elementi per una data riduzione della corrente di avviamento a, relativa al suo valore naturale, viene eseguito secondo le formule:
per resistori con resistenza attiva
R n = 
per strozzature
X L= 
Impedenza del motore in modalità di cortocircuito z k, ohm,
z K =U 1 /IO P
Qui X a e R k - componenti induttivi e attivi di questa resistenza
R K = z kcosφk ; X K =
Riduzione della coppia di avviamento artificiale all'accensione R O l sarà
α m = α 2 io
Tabella 3.1
Pertanto, se viene impostato il valore α m, che determina il valore della coppia di avviamento artificiale M "n, quindi per calcolare i valori corrispondenti R né x l puoi usare le formule di cui sopra, sostituendo in esse invece di α 2 io, il valore di α m.
Resistenza elettrica gli avvolgimenti del motore indicati nei cataloghi corrispondono generalmente ad una temperatura di +20 °C. Ma nel calcolo delle caratteristiche e dei parametri dei motori, la resistenza dei loro avvolgimenti deve essere portata alla temperatura di esercizio. In conformità con lo standard attuale, la temperatura di esercizio viene presa in base alla classe di resistenza al calore isolamento elettrico applicato nel motore: con classe di resistenza al calore B, la temperatura di esercizio è di 75 ° C e con classi di resistenza al calore F e H - 115 ° C. Il ricalcolo delle resistenze dell'avvolgimento alla temperatura di esercizio viene effettuato moltiplicando la resistenza dell'avvolgimento a una temperatura di 20 ° C, per il coefficiente di riscaldamento k T:
R= R 20k T .
I valori di questo coefficiente sono presi in base allo scopo dei motori e alle loro dimensioni (altezza dell'asse di rotazione) (Tabella 3.1).
MACCHINE SINCRONE
CONCETTI BASILARI
Una caratteristica delle macchine sincrone è una connessione rigida tra la velocità del rotore N 1 e la frequenza CA nell'avvolgimento dello statore F 1:
N 1 = F 1 60/ R.
In altre parole, il campo magnetico rotante dello statore e il rotore della macchina sincrona ruotano in modo sincrono, cioè con la stessa frequenza.
Secondo il loro design, le macchine sincrone sono divise in polo saliente e polo non saliente. Nelle macchine sincrone a poli salienti, il rotore ha poli pronunciati, sui quali si trovano le bobine di avvolgimento di campo, alimentate corrente continua. Una caratteristica di tali macchine è la differenza di resistenza magnetica lungo l'asse longitudinale (lungo l'asse dei poli) e lungo l'asse trasversale (lungo l'asse passante nello spazio interpolare). Resistenza magnetica al flusso dello statore lungo l'asse longitudinale gg molta meno resistenza magnetica al flusso dello statore asse trasversale qq. Nelle macchine sincrone a poli non salienti, le resistenze magnetiche lungo l'asse longitudinale e trasversale sono le stesse, poiché il traferro per queste macchine lungo il perimetro dello statore è lo stesso.
Il design dello statore di una macchina sincrona, in linea di principio, non differisce dallo statore macchina asincrona. Nell'avvolgimento dello statore, durante il funzionamento della macchina, viene indotta EMF e scorrono correnti che creano una forza magnetomotrice (MFF), il cui valore massimo è
F 1 =0,45M 1 IO 1 w 1 k giro1 / R
Questo MDS crea un campo magnetico rotante e nel traferro δ la macchina crea un'induzione magnetica, il cui programma di distribuzione all'interno di ciascuna divisione polare t dipende dal design del rotore (Fig. 4.1).
Per una macchina sincrona a poli salienti, vale l'equazione della sollecitazione:
Ú 1 =Ė 0 + Ė 1d + Ė 1q+ Ė σ1 – İ 1 R 1
Dove Ė 0 - l'EMF principale della macchina sincrona, proporzionale al flusso magnetico principale della macchina sincrona F 0 ; Ė 1 d - EMF della reazione dell'armatura della macchina sincrona lungo l'asse longitudinale, proporzionale all'MMF della reazione dell'armatura lungo l'asse longitudinale F 1d; Ė σ1 - reazione dell'armatura EMF lungo l'asse trasversale, proporzionale alla reazione dell'armatura MMF lungo l'asse trasversale F 1q; Ė σ1 - EMF di dispersione, dovuto alla presenza di un flusso magnetico di dispersione F 0 , il valore di questo EMF è proporzionale alla resistenza induttiva della dispersione dell'avvolgimento dello statore X 1
Ė σ1 = Jİ 1r
İ 1 R 1 - caduta di tensione attiva nell'avvolgimento di fase dello statore, solitamente questo valore viene trascurato quando si risolvono problemi a causa del suo piccolo valore.
Riso. 4.1. Grafici della distribuzione dell'induzione magnetica lungo l'asse trasversale
polo implicito ( UN) e polo esplicito ( B)macchine sincrone:
1 - programma MDS; 2 - grafico di induzione magnetica
Per una macchina sincrona a poli non salienti, l'equazione della sollecitazione ha la forma
Ú 1 =Ė 0 + Ė C- İ 1 R 1
Qui
Ė c= Ė 1 + Ė σ1
Dove Ė 1 - Fem di reazione di armatura di una macchina sincrona a poli impliciti. Le equazioni di sollecitazione considerate corrispondono ai diagrammi di sollecitazione vettoriale. Questi diagrammi devono essere costruiti per determinare la fem principale della macchina E 0, o tensione dell'avvolgimento dello statore U 1. Va tenuto presente che le equazioni di tensione e i corrispondenti diagrammi vettoriali non tengono conto della saturazione magnetica del circuito magnetico di una macchina sincrona, che, come sapete, influisce sul valore delle resistenze induttive, provocandole diminuire. Tenere conto di questa saturazione è un compito difficile, quindi, quando si calcola l'EMF e le tensioni delle macchine sincrone, di solito usano schema pratico EMF, che tiene conto dello stato di saturazione del sistema magnetico, causato dall'azione della reazione dell'armatura quando la macchina sincrona è caricata. Quando si costruisce un diagramma EMF pratico, la forza magnetizzante della reazione dell'armatura non viene scomposta in componenti longitudinali e trasversali, quindi questo diagramma può essere utilizzato sia nei calcoli delle macchine a polo saliente che a polo implicito.
Quando risolvono problemi associati a generatori sincroni collegati in parallelo alla rete o a motori sincroni, utilizzano caratteristiche angolari macchine sincrone, che rappresentano la dipendenza del momento elettromagnetico M dall'angolo di carico θ. In questo caso va ricordato che nelle macchine sincrone a poli salienti i punti sono due: il principale M principale e reattivo M p, e nelle macchine a poli non salienti - solo il punto principale:
![]()
L'angolo di carico θ nom corrisponde alla coppia nominale M nom. La coppia massima della macchina sincrona determina la capacità di sovraccarico della macchina sincrona, che è importante per entrambi generatori sincroni funzionanti in parallelo alla rete e per motori sincroni. Nelle macchine sincrone a poli non salienti momento massimo corrisponde all'angolo di carico θ = 90°, nelle macchine a poli salienti θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного momenti elettromagnetici questa macchina.
Per calcolare l'angolo di carico critico, che determina la capacità di sovraccarico delle macchine sincrone a poli salienti, è possibile utilizzare l'espressione.





