Inviare il tuo buon lavoro nella knowledge base è semplice. Usa il modulo sottostante
Gli studenti, i dottorandi, i giovani scienziati che utilizzano la base di conoscenze nei loro studi e nel loro lavoro ti saranno molto grati.
Ospitato su http://www.allbest.ru/
ucraino accademia statale trasporto ferroviario
Centro di formazione scientifica e pratica
dalla disciplina "Ingegneria elettrica"
"Motore corrente continua con eccitazione parallela
Piano
1. Introduzione
2. Progettazione del motore a corrente continua
3. Avviare i motori
4. Dati tecnici dei motori
5. Caratteristiche del motore a corrente continua
6. Caratteristica meccanica
7. Elenco della letteratura usata
Un motore a corrente continua (motore a corrente continua) è un convertitore di energia elettrica a corrente continua in energia meccanica. Il design del motore è mostrato in Fig.1. Ha tre parti principali: lo statore (induttore), l'armatura e il collettore.
L'induttore (1) - la parte fissa della macchina, è un cilindro cavo in acciaio fuso in acciaio elettrico, a cui dentro i nuclei (pali) sono fissati con bulloni. Sui nuclei è presente un avvolgimento di eccitazione (OB) collegato alle spazzole. L'induttore è progettato per creare il principale campo magnetico. L'ancora (2) (parte interna rotante della macchina) è un cilindro assemblato da lamiere di acciaio. Un avvolgimento di ancoraggio è posato nelle scanalature dell'armatura. Il collettore (3) è fissato sullo stesso albero dell'indotto, che è un cilindro cavo formato da singole lamelle di rame (lamelle) isolate tra loro e dall'albero dell'indotto e collegate elettricamente alle singole parti dell'avvolgimento dell'indotto. Lo scopo del collettore è la rettifica meccanica di campi elettromagnetici sinusoidali variabili in una tensione costante in grandezza e direzione, che viene rimossa al circuito esterno utilizzando spazzole adiacenti al collettore. Le proprietà dei motori CC sono determinate principalmente dal modo in cui viene alimentato l'avvolgimento di campo. A questo proposito, i motori in corrente continua sono classificati in 2 tipologie: con eccitazione indipendente(Fig. 2a) e autoeccitazione (Fig. 2 b, c, d)
L'avvolgimento di eccitazione in un DCT con eccitazione indipendente è alimentato da una sorgente CC separata (da un raddrizzatore a semiconduttore, batteria o eccitatore - generatore CC).
Nei DCT autoeccitati, i circuiti dell'indotto e dell'indotto sono collegati elettricamente, ad es. l'avvolgimento di eccitazione è alimentato dall'EMF dell'indotto della macchina.
Dipende da circuito elettrico le connessioni degli avvolgimenti dell'indotto e dell'induttore di una macchina con autoeccitazione sono ulteriormente suddivise in tre tipi: eccitazione parallela, serie e mista (Fig. 2 b, c, d). Il DPT, come tutte le macchine elettriche, è reversibile, cioè sono privi di costruttivo significativo
le modifiche possono funzionare sia nella modalità del generatore, sia nella modalità del motore. Modalità di funzionamento DPT con eccitazione parallela. Si consideri il funzionamento di un DPT con eccitazione parallela (Fig. 2b). Quando il motore è collegato a una rete CC, si generano correnti in entrambi gli avvolgimenti. In questo caso, nell'avvolgimento di eccitazione, la corrente di eccitazione IB crea un campo magnetico dell'induttore.
L'interazione della corrente di armatura con il campo magnetico dell'induttore crea un momento elettromagnetico della ME.
IO = sFIYA, (1)
dove c è un coefficiente costante;
Iß - corrente di armatura;
Ф - flusso magnetico.
Il momento elettromagnetico della ME differisce dal momento della MW sull'albero motore per il valore del momento delle perdite a vuoto MHH, che, a causa della sua piccolezza, può essere trascurato e presumere che
Un back-EMF E è indotto nei conduttori dell'armatura rotante:
dove n è la velocità di rotazione dell'indotto;
k è un fattore costante.
L'equazione di equilibrio elettrico del motore ha la forma:
U \u003d E + Iß RY \u003d knФ + Iß RY, (3)
dove U è la tensione di rete.
Avviare il motore
All'avviamento del motore, l'indotto è fermo al primo momento (n = 0) e data (2) l'EMF dell'indotto E = knF = 0. In questo caso, secondo (3), la corrente di avviamento dell'armatura IYaP è inaccettabilmente grande, perché R è piccola ed è definita come:
Pertanto, per limitare la corrente di avviamento, la resistenza del reostato di avviamento RP viene introdotta in serie nel circuito dell'indotto, che viene completamente introdotto prima dell'avviamento del motore e viene emesso dopo che il motore accelera all'aumentare dell'EMF di ritorno (E).
Tale avvio del motore protegge l'avvolgimento dell'indotto da elevate correnti di avviamento INP e consente di ottenere il massimo flusso magnetico in questa modalità.
Se il motore viene avviato al minimo, non è necessario sviluppare la coppia massima MB sull'albero. Pertanto, il motore può essere avviato aumentando gradualmente la tensione di alimentazione U.
Inversionemotore.
La modifica del senso di rotazione del motore può essere ottenuta modificando la corrente nell'avvolgimento dell'indotto o nell'avvolgimento del campo, perché. questo cambia il segno della coppia. Il cambio simultaneo della direzione della corrente in entrambi gli avvolgimenti non cambia il senso di rotazione del motore. La commutazione delle estremità degli avvolgimenti deve essere eseguita solo dopo che il motore si è completamente spento.
Regolamentovelocitàrotazione.
Dall'espressione (3) è possibile determinare la velocità di rotazione del motore:
avvolgimento di alimentazione in corrente continua del motore
Dalla formula (6) si può vedere che la velocità di rotazione di un motore a corrente continua può essere controllata variando la tensione di rete, il flusso magnetico di eccitazione e la resistenza del circuito dell'indotto. Il modo più comune per controllare la velocità di rotazione del motore è modificare il flusso magnetico per mezzo di un reostato di regolazione nel circuito di eccitazione.
La riduzione della corrente di eccitazione indebolisce il flusso magnetico e aumenta la velocità di rotazione del motore. Questo metodo è economico, perché la corrente di eccitazione (nei motori ad eccitazione in parallelo) è del 3-5% dell'armatura IN e le perdite di calore nel reostato di controllo sono molto piccole. Caratteristiche principali del motore a corrente continua con eccitazione parallela
Il funzionamento di un motore in corrente continua con eccitazione parallela è valutato dalle seguenti caratteristiche principali:
Caratteristica del minimo: (fig.3)
n0 = ѓ (IB), con U = UN = const e Iß = I0,
dove n0 è il regime del minimo (senza carico),
I0 - corrente a vuoto del 5 - 10% IH;
ONU - valore nominale tensione di rete.
Tenendo conto che al minimo il prodotto IßRß è piccolo rispetto a U, allora da (6) il regime del motore è determinato dalla relazione inversa al flusso magnetico Ф:
Con un aumento della corrente nell'avvolgimento di eccitazione, il flusso magnetico cambia lungo la curva di magnetizzazione Ф = ѓ (IВ), quindi la relazione tra la velocità di rotazione del motore n e la corrente di eccitazione IВ è quasi iperbolica. A bassi valori della corrente di eccitazione, i giri cambiano quasi inversamente. Ad alte correnti di eccitazione,
la saturazione magnetica dei poli d'acciaio ha effetto e la curva diventa più piatta e corre quasi parallela all'asse delle ascisse. Un brusco cambiamento: una diminuzione della corrente di eccitazione, nonché un circuito aperto accidentale del circuito di eccitazione secondo (9) può causare il "funzionamento" del motore (quando IВ > 0, e quindi anche Ф tende a 0, n > ?).
Caratteristica meccanica. Questa è la dipendenza della velocità di rotazione del rotore dalla coppia MT sull'albero motore a tensione di rete e corrente di eccitazione costanti:
n \u003d ѓ (MV), con U \u003d UH \u003d const, IВ \u003d const.
Per un motore ad eccitazione parallela, il momento MV è proporzionale al primo grado della corrente di armatura Iβ. Pertanto, la caratteristica meccanica può essere rappresentata dalla dipendenza n (Ib), che prende il nome di elettromeccanica o velocità (Fig. 4).
Un carico (coppia frenante) viene applicato all'albero motore. Secondo (6), a valori costanti della corrente di eccitazione, una diminuzione della velocità di rotazione n è una conseguenza della caduta di tensione nel circuito dell'indotto - IЯ·RЯ e della reazione dell'indotto. Con un aumento del carico, la velocità di rotazione diminuisce di un importo insignificante, dell'ordine del 3-8%. Questa caratteristica di velocità è chiamata rigida. Caratteristica di regolazione (Fig. 5). Questa è la dipendenza della corrente di eccitazione IB dalla corrente di armatura IA a tensione costante rete U e velocità di rotazione costante n:
IВ \u003d ѓ (IЯ) a U \u003d ONU, n \u003d cost.
Dall'analisi della caratteristica esterna si può notare che la velocità di rotazione diminuisce all'aumentare del carico.
La caratteristica di controllo permette di valutare come, entro quali limiti, sia necessario regolare la corrente nell'avvolgimento di eccitazione per mantenere una velocità di rotazione costante.
Tecnica sperimentale
Si prosegue lo studio delle modalità di funzionamento del DPT con eccitazione parallela
complesso didattico modulare MUK-EP1, composto da:
Alimentazione motore CC BPP1;
Alimentatore per motore asincrono BPA1
Gruppo macchina elettrica MA1-AP.
PL073U3 (220V, 180W,
1500 giri/min). Commutazione automatica degli avvolgimenti del motore e collegamento della misura
dispositivi viene eseguito nel blocco BPP1.
Usato come carico motore asincrono(BP) nella modalità frenata dinamica. Commutazione automatica degli avvolgimenti e della connessione BP strumenti di misura ad esso viene effettuato nel blocco BPA1.
Lo schema di funzionamento del complesso dopo la commutazione dei blocchi è mostrato in Fig.6.
Bibliografia
1. Katsman MM Auto elettrica. - M.: Più in alto. scuola, 1993.
2. Kopylov IP Auto elettrica. - M.: Energoatomizdat, 1986
Ospitato su Allbest.ru
...Documenti simili
Il principio di funzionamento e il dispositivo dei generatori di corrente continua. Forza elettromotiva e coppia elettromagnetica del generatore CC. Metodi di eccitazione dei generatori di corrente continua. Caratteristiche e caratteristiche dei motori vari tipi Risveglio.
abstract, aggiunto il 12/11/2009
Controllo della velocità dei motori CC modificando il flusso di eccitazione. Massima protezione di corrente dell'azionamento elettrico. Caratteristiche di velocità del motore. Schemi di circuiti di potenza di motori in corrente continua e motori asincroni.
tesina, aggiunta il 30/03/2014
Il principio di funzionamento del generatore CC. Avvolgimenti di ancoraggio e processo di eccitazione delle macchine a corrente continua. Avvolgimento con sezione "morta". Un esempio di un semplice loop and wave winding. Motore a corrente continua con eccitazione sequenziale.
presentazione, aggiunta il 09/11/2013
Design e principio di funzionamento macchine elettriche corrente continua. Studio del carico, caratteristiche esterne e di controllo e proprietà di funzionamento di un generatore ad eccitazione indipendente. Caratteristiche dell'avviamento di un motore con un sistema di eccitazione parallela.
lavoro di laboratorio, aggiunto il 02/09/2014
Studio delle caratteristiche meccaniche di motori in corrente continua ad eccitazione parallela, indipendente e in serie. modalità di frenata. motore elettrico corrente alternata con rotore di fase. Studio dei circuiti di avviamento dei motori, funzioni del tempo.
lavoro di laboratorio, aggiunto il 23/10/2009
Il principio di funzionamento e il dispositivo del generatore CC. Tipi di avvolgimenti dell'indotto. Metodi di eccitazione dei generatori di corrente continua. Reversibilità delle macchine DC. Motore ad eccitazione parallela, indipendente, in serie e mista.
abstract, aggiunto il 17/12/2009
Progettazione del motore a corrente continua. Il nucleo dei principali vantaggi, il tipo e il passo dell'avvolgimento dell'indotto. Il numero di giri di avvolgimento, piastre collettori, fessure. Caratteristica di magnetizzazione del motore. La massa dei fili di avvolgimento dell'indotto e i principali indicatori dinamici.
tesina, aggiunta il 21/05/2012
Alimentazione del motore durante il controllo della velocità modificando il valore della tensione da una sorgente CC regolata separata. Applicazione di convertitori a tiristori negli azionamenti elettrici in corrente continua. Schema strutturale convertitore a tiristori.
tesina, aggiunta il 02/01/2015
Modellazione dell'avvio del motore DC DP-62 per l'azionamento del carrello per lingotti utilizzando il pacchetto SciLab. Schema a blocchi del modello, suoi elementi. Dati del passaporto del motore DP-62, tipo di eccitazione. Diagramma transitorio, tracciatura.
lavoro di laboratorio, aggiunto il 18/06/2015
Caratteristiche del calcolo del motore CC dalla posizione dell'oggetto di controllo. Calcolo del convertitore a tiristori, dei sensori di azionamento elettrico e del sensore di corrente. Schema di un motore a corrente continua con eccitazione indipendente. Modellazione del contorno esterno.
Capitolo 29
Concetti basilari
M, rotante.
antielettromotrice
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
Ma, secondo (25.24),
![]()
![]() , (29.4)
, (29.4)
![]() .
.
M, .
cioè. u o diminuzione del flusso F ;
tu, F
F
Accensione del motore
u .
reostati di partenza
R o 1
![]() .
.
Allo stesso tempo attraverso la leva R e stanca w R,
,
M direttamente proporzionale alla portata F F
Capitolo 29
Concetti basilari
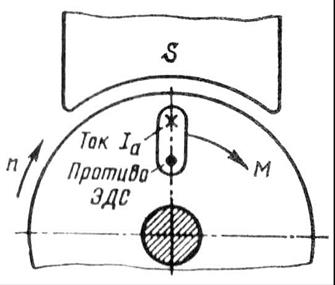
Le macchine collettori hanno la proprietà della reversibilità, ovvero possono funzionare sia in modalità generatore che in modalità motore. Pertanto, se una macchina CC è collegata a una fonte di alimentazione CC, le correnti appariranno nell'avvolgimento di eccitazione e nell'avvolgimento dell'indotto della macchina. L'interazione della corrente dell'indotto con il campo di eccitazione crea un momento elettromagnetico sull'indotto M, che non sta frenando, come avveniva nel generatore, ma rotante.
Sotto l'influenza momento elettromagnetico armatura, la macchina inizierà a ruotare, ovvero la macchina funzionerà in modalità motore, consumando energia elettrica dalla rete e convertendola in energia meccanica. Durante il funzionamento del motore, la sua armatura ruota in un campo magnetico. Un EMF è indotto nell'avvolgimento dell'indotto, la cui direzione può essere determinata dalla regola della "mano destra". Per sua natura, non differisce dall'EMF indotto nell'avvolgimento dell'indotto del generatore. Nel motore, l'EMF è diretto contro corrente e quindi viene chiamato antielettromotrice forza (back-EMF) dell'armatura (Fig. 29.1).
Per un motore che funziona a velocità costante,
![]() .
(29.1)
.
(29.1)
Da (29.1) segue che la tensione fornita al motore è bilanciata dal back EMF dell'avvolgimento dell'indotto e dalla caduta di tensione nel circuito dell'indotto. Basato su (29.1) corrente di armatura
Moltiplicando entrambi i membri dell'equazione (29.1) per la corrente di armatura , otteniamo equazione di potenza per il circuito dell'indotto:
![]() , (29.3)
, (29.3)
dov'è la potenza nel circuito dell'avvolgimento dell'indotto; - potenza delle perdite elettriche nel circuito dell'indotto.
Per chiarire l'essenza dell'espressione, eseguiremo la seguente trasformazione:
![]() ,
,
![]() .
.
Ma, secondo (25.24),
![]()
![]() , (29.4)
, (29.4)
dove è la frequenza angolare di rotazione dell'armatura; - potenza elettromagnetica del motore.
Pertanto, l'espressione è potenza elettromagnetica del motore.
Trasformando l'espressione (29.3) tenendo conto della (29.4), otteniamo
![]() .
.
Un'analisi di questa equazione mostra che con un aumento del carico sull'albero motore, cioè con un aumento della coppia elettromagnetica M, aumenta la potenza nel circuito dell'avvolgimento dell'indotto, cioè la potenza all'ingresso del motore. Ma poiché la tensione fornita al motore viene mantenuta invariata, l'aumento del carico del motore è accompagnato da un aumento della corrente nell'avvolgimento dell'indotto .
A seconda del metodo di eccitazione, i motori CC, così come i generatori, sono suddivisi in motori con eccitazione da magneti permanenti (magnetoelettrico) e con eccitazione elettromagnetica. Questi ultimi, secondo il circuito per l'accensione dell'avvolgimento di eccitazione rispetto all'avvolgimento dell'indotto, sono suddivisi in motori di eccitazione paralleli (shunt), serie (seriale) e misti (composti).
Secondo la formula EMF, velocità del motore (rpm)
Sostituendo il valore di (29.1), otteniamo (rpm)
cioè. la velocità del motore è direttamente proporzionale alla tensione e inversamente proporzionale al flusso di eccitazione. Fisicamente, questo è spiegato dal fatto che l'aumento della tensione u o diminuzione del flusso F provoca un aumento della differenza ; questo, a sua volta, porta ad un aumento della corrente [vedi Fig. (29.2)]. Di conseguenza, l'aumento della corrente aumenta la coppia e se la coppia del carico rimane invariata, la velocità del motore aumenta.
Da (29.5) segue che il regime del motore può essere controllato variando sia la tensione tu, fornita al motore, o il flusso magnetico principale F o resistenza elettrica nel circuito dell'indotto.
Il senso di rotazione dell'armatura dipende dalle direzioni del flusso magnetico di eccitazione F e corrente nell'avvolgimento dell'indotto. Pertanto, modificando la direzione di una qualsiasi di queste quantità, è possibile modificare il senso di rotazione dell'armatura. Va tenuto presente che la commutazione dei terminali comuni del circuito sull'interruttore a coltello non cambia il senso di rotazione dell'indotto, poiché ciò cambia contemporaneamente la direzione della corrente sia nell'avvolgimento dell'indotto che nell'avvolgimento di eccitazione.
Accensione del motore
La corrente di armatura del motore è determinata dalla formula (29.2). Se accetta u e invariato, quindi la corrente dipende dal back-EMF . La corrente raggiunge il suo valore massimo all'avviamento del motore. Al momento iniziale dell'avviamento, l'indotto del motore è fermo e non viene indotto EMF nel suo avvolgimento. Pertanto, quando il motore è collegato direttamente alla rete, si verifica una corrente di spunto nell'avvolgimento della sua armatura
Solitamente la resistenza è piccola, quindi il valore della corrente di spunto raggiunge valori inaccettabilmente grandi, 10-20 volte superiori a corrente nominale motore.
Una corrente di avviamento così grande è molto pericolosa per il motore. In primo luogo, può provocare un incendio circolare nella macchina e, in secondo luogo, con una tale corrente, si sviluppa una coppia di spunto eccessivamente elevata nel motore, che ha un effetto d'urto sulle parti rotanti del motore e può distruggerle meccanicamente. E infine, questa corrente provoca un forte calo della tensione nella rete, che influisce negativamente sul funzionamento di altri consumatori inclusi in questa rete. Pertanto, l'avviamento del motore tramite collegamento diretto alla rete (avviamento non reostatico) viene solitamente utilizzato per motori con una potenza non superiore a 0,7-1,0 kW. In questi motori, a causa della maggiore resistenza dell'avvolgimento dell'indotto e delle piccole masse rotanti, il valore della corrente di spunto è solo 3-5 volte superiore alla corrente nominale, il che non rappresenta un pericolo per il motore. Per quanto riguarda i motori di maggiore potenza, all'avviamento servono a limitare la corrente di spunto. reostati di partenza(PR), compreso in serie nel circuito dell'indotto (avviamento reostatico).
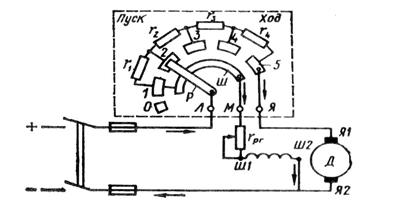
Prima di avviare il motore, è necessaria una leva R mettere il reostato in folle o(Fig. 29.2). Quindi accendere l'interruttore del coltello, spostare la leva sul primo contatto intermedio 1
e il circuito dell'indotto del motore è collegato alla rete tramite la massima resistenza del reostato ![]() .
.
Riso. 29.2. Schema di accensione del reostato di avviamento
Allo stesso tempo attraverso la leva R e stanca w alla rete è collegato un avvolgimento di eccitazione, la corrente in cui durante l'intero periodo di avviamento non dipende dalla posizione della leva R, poiché la resistenza del bus è trascurabile rispetto alla resistenza dell'avvolgimento di eccitazione.
Corrente di armatura di avviamento all'impedenza del reostato di avviamento
Con l'avvento della corrente nel circuito dell'indotto, si verifica una coppia di avviamento, sotto l'influenza della quale inizia la rotazione dell'indotto. All'aumentare della velocità, il back-emf aumenta , che porta ad una diminuzione della corrente di spunto e della coppia di spunto.
Quando l'indotto del motore accelera, la leva del reostato di avviamento viene spostata nelle posizioni 2, 3, ecc. Nella posizione 5 della leva del reostato, l'avviamento del motore termina. La resistenza del reostato di avviamento viene solitamente scelta in modo che la corrente di avviamento più grande superi la corrente nominale non più di 2-3 volte.
Poiché la coppia del motore M direttamente proporzionale alla portata F[centimetro. (25.24)], quindi per facilitare l'avviamento del motore di eccitazione parallela e mista, la resistenza del reostato nel circuito di eccitazione deve essere completamente rimossa. flusso di eccitazione F in questo caso ottiene valore più alto e il motore sviluppa la coppia richiesta a una corrente di armatura inferiore.
Non è consigliabile utilizzare reostati di avviamento per avviare motori di maggiore potenza, in quanto ciò provocherebbe notevoli perdite di energia. Inoltre, i reostati di avviamento sarebbero ingombranti. Pertanto, nei motori ad alta potenza, viene utilizzato un avviamento del motore senza reostato abbassando la tensione. Esempi di ciò sono l'avvio dei motori di trazione di una locomotiva elettrica commutandoli da connessione seriale quando si inizia in parallelo con operazione normale(vedere § 29.6) o avviare il motore in un circuito generatore-motore (vedere § 29.4).
Motore ad eccitazione parallela
Lo schema per il collegamento di un motore ad eccitazione parallela alla rete è mostrato in fig. 29.3, un. Una caratteristica di questo motore è che la corrente nell'avvolgimento di campo (OB) non dipende dalla corrente di carico (corrente di armatura). Il reostato nel circuito di eccitazione serve a regolare la corrente nell'avvolgimento di eccitazione e il flusso magnetico dei poli principali.
Le proprietà prestazionali di un motore sono determinate dalla sua caratteristiche operative, che è intesa come la dipendenza della velocità di rotazione n, attuale io, momento utile M2, coppia M dalla potenza sull'albero motore R 2 a e (Fig. 29.3, 6 ).
Per analizzare la dipendenza e , che di solito viene chiamata caratteristica di velocità, passiamo alla formula (29.5), dalla quale si può vedere che a tensione costante u due fattori influenzano la velocità: la caduta di tensione nel circuito dell'indotto e il flusso di eccitazione F. All'aumentare del carico il numeratore diminuisce, mentre per la reazione dell'indotto diminuisce anche il denominatore F. Tipicamente, la riduzione del flusso causata dalla reazione dell'indotto è piccola e il primo fattore influisce sulla velocità più del secondo. Di conseguenza, la velocità del motore all'aumentare del carico R 2 diminuisce e il grafico assume una forma discendente con un leggero rigonfiamento rivolto verso l'asse x. Se la reazione dell'armatura nel motore è accompagnata da un indebolimento più significativo del flusso F, allora la velocità di rotazione aumenterà all'aumentare del carico, come mostrato dalla curva tratteggiata in Fig. 29.3, b. Tuttavia, una tale dipendenza è indesiderabile, poiché, di regola, non soddisfa la condizione per un funzionamento stabile del motore: con un aumento del carico sul motore, aumenta la velocità di rotazione, il che porta ad un ulteriore aumento del carico , ecc., ovvero la velocità di rotazione n il motore aumenta indefinitamente e il motore va "surriscaldato". Per dare alla caratteristica di velocità una forma curva discendente, alcuni motori shunt utilizzano un avvolgimento di eccitazione in serie leggero (con un numero ridotto di giri), chiamato avvolgimento stabilizzante. Quando questo avvolgimento viene attivato in coordinamento con l'avvolgimento di eccitazione parallela, il suo MMF compensa l'effetto smagnetizzante della reazione dell'indotto in modo che il flusso F rimane praticamente invariato su tutto il range di carico .., poiché
Se trascuriamo la reazione di ancoraggio, allora (poiché ) possiamo accettare . Quindi la caratteristica meccanica del motore ad eccitazione parallela è una linea retta, alquanto inclinata rispetto all'asse delle ascisse (Fig. 29.4, un). L'angolo di inclinazione della caratteristica meccanica è tanto maggiore quanto maggiore è il valore della resistenza inclusa nel circuito dell'indotto. Viene chiamata la caratteristica meccanica del motore in assenza di resistenza aggiuntiva nel circuito dell'indotto naturale(dritto 1 ). Vengono denominate le caratteristiche meccaniche del motore, ottenute introducendo una resistenza aggiuntiva nel circuito dell'indotto artificiale(diretto 2 e 3 ).
Il tipo di caratteristica meccanica dipende anche dal valore del flusso magnetico principale F. Quindi, quando decresce F la velocità di rotazione x.x aumenta. e contemporaneamente aumenta, cioè entrambi i termini dell'equazione (29.11) aumentano. Ciò porta ad un forte aumento della pendenza della caratteristica meccanica, cioè ad una diminuzione della sua rigidità (Fig. 29.4, b).
Quando la tensione di armatura cambia u la velocità di rotazione cambia, ma rimane invariata. Di conseguenza, la rigidità della caratteristica meccanica (se trascuriamo l'influenza della reazione dell'indotto) non cambia (Fig. 29.4, in), cioè, le caratteristiche si spostano in altezza pur rimanendo parallele tra loro.
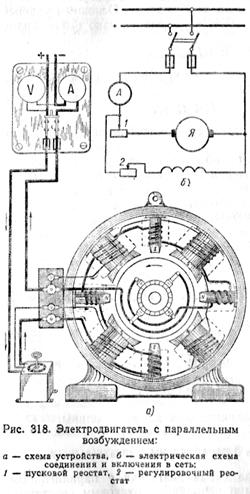
§ 138. MOTORE ELETTRICO CON ECCITAZIONE PARALLELA
Sulla fig. 318 mostra uno schema di un motore con eccitazione in parallelo e reostato di avviamento incluso nel circuito dell'indotto. Poiché l'avvolgimento di eccitazione è collegato in parallelo alla rete, quando resistenza costante il circuito di eccitazione e la tensione di rete, il flusso magnetico F del motore deve essere costante.
Dalla formula
si può notare che il valore di counter-e. ds il motore diminuisce all'aumentare della corrente di armatura, facendo diminuire anche la velocità del motore.
Tuttavia, come accennato in precedenza, l'entità della caduta di tensione nell'avvolgimento dell'indotto I a r a è molto piccola rispetto alla tensione U. Pertanto, con un aumento della corrente di carico, il regime del motore diminuisce leggermente.
Quindi, una proprietà caratteristica di un motore con eccitazione parallela è una velocità di rotazione quasi costante quando cambia il carico sul suo albero. Di solito, le velocità dei motori di questo tipo diminuiscono solo del 3-5% al raggiungimento del pieno carico.
La coppia del motore è proporzionale al prodotto della corrente di armatura e del flusso magnetico:
Da ciò si può notare che la coppia del motore con eccitazione parallela è proporzionale alla corrente di armatura:
Pertanto, dall'amperometro incluso nel circuito dell'indotto, si può giudicare il carico del motore.
Il motore avrà la massima velocità di rotazione al minimo, se la resistenza del reostato di regolazione viene completamente rimossa. L'apertura del circuito di eccitazione farà diminuire il flusso magnetico del motore a una quantità trascurabile del flusso di magnetismo residuo. Dal momento che la contro-e. ds dovrebbe essere quasi uguale alla tensione di rete, quindi con una diminuzione del flusso magnetico, la velocità di rotazione del motore aumenterà bruscamente e diventerà pericolosa per la resistenza meccanica del motore. Pertanto, durante il funzionamento del motore, è necessario monitorare le buone condizioni del circuito di eccitazione.
Il controllo della velocità di un motore shunt viene solitamente effettuato variando il flusso con un reostato variabile nel circuito di eccitazione. Questo metodo di controllo della velocità è il più economico. Alcuni motori hanno un controllo della velocità compreso tra 1,5:1 e 4:1. I numeri mostrano il rapporto tra la velocità massima e quella minima. I limiti di regolazione sono limitati principalmente dal deterioramento delle condizioni di commutazione e dalla resistenza meccanica dell'indotto.
La modifica del senso di rotazione dei motori con eccitazione parallela può essere eseguita cambiando la direzione della corrente nell'avvolgimento di eccitazione dei poli o cambiando la direzione della corrente nell'avvolgimento dell'indotto. Solitamente, il cambio di rotazione viene effettuato nel secondo modo, poiché eventuali operazioni con l'avvolgimento di eccitazione sono pericolose per il personale operativo e sono indesiderabili a causa della comparsa di e. ds autoinduzione, che può causare la rottura dell'isolamento dell'avvolgimento e la combustione dei contatti.
I motori con eccitazione parallela vengono utilizzati nelle reti CC per azionare alcune macchine, meccanismi (strade elettriche aeree, pompe, ventilatori, macchine per tessere, laminatoi, argani da miniera) che richiedono una velocità di rotazione costante o un'ampia regolazione della velocità.
23 .Reazione dell'ancora, la sua Influenza negativa sul funzionamento di un motore a corrente continua, modi per compensare la reazione dell'indotto.
Reazione dell'indotto: l'effetto del campo magnetico creato dalla corrente dell'indotto sul campo magnetico dei poli principali della macchina. In modalità di riposo, la corrente di armatura = 0 e il campo magnetico della macchina è formato solo dai poli principali (Fig (a)). È simmetrico rispetto all'asse dei poli principali e rispetto al neutro geometrico. Se si spegne l'avvolgimento di eccitazione e si collega l'armatura a Alimentazione elettrica, quindi la corrente che scorre nell'avvolgimento dell'indotto creerà un campo magnetico mostrato in figura (b). l'asse dei poli di questo campo coincide con l'asse delle spazzole ed è perpendicolare all'asse del campo dei poli principali. La rotazione dell'armatura non influisce sul modello del campo dell'armatura, perché la distribuzione di corrente nell'avvolgimento dell'indotto rimane costante. Nella modalità di funzionamento della macchina, entrambi gli avvolgimenti sono accesi e il campo magnetico si forma sommando entrambi i campi. Di conseguenza, l'asse del campo magnetico viene ruotato di alcuni angoli, il neutro fisico viene ruotato dello stesso angolo. In modalità motore, il folle viene spostato contro rotazione. Per effetto dello spostamento, parte dei conduttori del ramo parallelo posto tra spazzola e neutro si troverà sotto il polo di polarità opposta e creerà una coppia frenante.Una variazione del carico della macchina comporterà una variazione nella corrente di armatura e un corrispondente aumento o diminuzione del suo campo magnetico. Pertanto, l'angolo cambierà con il carico.Oltre allo spostamento neutro, la reazione dell'armatura riduce il flusso magnetico complessivo a causa del fatto che il campo sotto i poli principali è distorto. Sotto un bordo del polo è indebolito e sotto l'altro è rafforzato, ma l'amplificazione del campo a causa della saturazione del bordo del polo è inferiore all'indebolimento e il flusso magnetico risultante diminuisce, il che influisce negativamente sull'energia prestazioni della macchina Lo spostamento del neutro fisico ha anche un effetto negativo sul processo di commutazione Il più efficace . mezzo per ridurre l'influenza della reazione di ancoraggio è avvolgimento di compensazione. Si inserisce nelle apposite scanalature dei poli principali ed è collegato in serie al circuito dell'indotto. Il campo magnetico dell'avvolgimento di compensazione è opposto e compensa il campo magnetico dell'indotto. Corrente di avvolgimento di compensazione = corrente di armatura, quindi la compensazione avviene in tutte le modalità dal minimo al pieno carico. Di conseguenza, il campo della macchina sotto i pali principali rimane praticamente invariato. Un altro modo - aumento liquidazione tra i bordi dei pali principali e l'ancora. Per mantenere il flusso con un aumento del divario, è necessario un aumento dell'MMF dell'avvolgimento di eccitazione.
Macchine elettriche a corrente continua.
Generatore con eccitazione parallela.
Formule di calcolo:
La corrente fornita dal generatore alla rete:
ed. generatore: E \u003d U + Iya ∙Rya.
Potenza fornita alla rete: P2 \u003d U ∙ I \u003d I 2 ∙ R
Potenza motore di azionamento: P1 = P2/ η
Perdita di potenza nell'avvolgimento dell'indotto:
Rya \u003d io 2 io ∙ Rya
Perdita di potenza nell'avvolgimento di campo:
Рв = U ∙Iв = I 2 в∙ Rв
Perdite totali: ΣP = P1 - ...
R2.
Efficienza del generatore:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Motore con eccitazione parallela.
Formule di calcolo:
Corrente motore: I \u003d Ia + Iv
Tensione del motore: U \u003d E + Ii ∙Rya.
Potenza consumata dalla rete: Р1 = U∙I
Potenza all'albero: P 2 = P 1 ∙η
Momento sull'albero motore:
M \u003d 9550 ∙ P 2 / n 2.
Efficienza del motore:
η \u003d P 2 / P 1 \u003d (U∙I-ΣP) / U∙I
Esempio 6.1. Un generatore DC con eccitazione in parallelo sviluppa una tensione nominale Un = 220 V. Il generatore è caricato con un carico Rn = 2,2 Ohm. Resistenza dell'avvolgimento dell'indotto Rya = 0,2 Ohm, avvolgimento di eccitazione Rv = 220 Ohm. Efficienza del generatore η = 0,87. Determina le seguenti quantità:
1. corrente di carico; 2. corrente di armatura; 3. corrente di eccitazione; 4. generatore di fem;
5.potenza netta; 6. consumo di energia; 7. perdite totali del generatore; 8. perdite nell'avvolgimento dell'indotto; 9. perdite nell'avvolgimento di eccitazione.
1. Corrente di carico:
2. Corrente di eccitazione:
![]()
3. Corrente di armatura: Iа \u003d I - Iv \u003d 100 - 1 \u003d 99 A.
4. Generatore di campi elettromagnetici:
E \u003d U + Ii ∙ Rya \u003d 220 + 99 0,1 \u003d 229,9 V.
5. Potenza netta:
Р2 = Un ∙ I = 220 ∙ 100 = 22000 W = 22 kW.
6. Consumo di energia:
7. Perdite totali nel generatore:
ΣP \u003d P1 - P2 \u003d 25,87 - 22 \u003d 3,87 kW.
8. Perdite nell'avvolgimento dell'indotto:
Rya \u003d Iya 2 ∙Rya \u003d 99 2 ∙0.2 \u003d 1960.2 W.
9. Perdite nell'avvolgimento di eccitazione:
Pv = Un ∙ Iv = 220 ∙ 1 = 220 W.
Risposta: I = 100A; Iv \u003d 1 A; Ia = 99 A; E = 229,9 V; P2 = 22 kW;
P1 = 25,87 kW; ΣР = 3,87 kW; Rya = 1960,2 W; Pv \u003d 220 W.
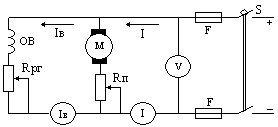
Esempio 6.2. Fig. 8.2 Il motore a corrente continua di eccitazione parallela funziona dalla rete Un = 220 V. Velocità dell'indotto n2 = 1450 giri/min. Corrente del motore I \u003d 500 A, armatura posteriore emf E \u003d 202 V, resistenza dell'avvolgimento di eccitazione Rv \u003d 44 Ohm. Efficienza del motore
η = 0,88. Determinare: 1. corrente di eccitazione; 2. corrente di armatura; 3. resistenza dell'avvolgimento dell'indotto; 4. consumo di energia; 5.potenza utile dell'albero; 6 Perdite totali nel motore; 7. perdite nell'avvolgimento dell'indotto; 8. perdite nell'avvolgimento dell'indotto; 9.coppia sull'albero.
1. Corrente di eccitazione:
![]()
2. Corrente di armatura:
Ia \u003d I - Iv \u003d 500 -5 \u003d 495 A.
3. Resistenza dell'avvolgimento dell'indotto:
4. Consumo di energia dalla rete:
P1 \u003d Un ∙ I \u003d 220 ∙ 500 \u003d 110.000 W \u003d 110 kW.
5. Potenza netta dell'albero:
Р2 = P1 ∙ η = 110 ∙ 0,87 = 95,7 kW.
6. Perdite totali nel motore:
ΣP \u003d P1 - P2 \u003d 110 - 95,7 \u003d 14,3 kW.
Ti consigliamo di leggere
, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina che
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina che Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito
Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito Mele al forno con ricotta Mele al forno con ricotta
Mele al forno con ricotta Mele al forno con ricotta

