Per tutti motore a induzione si può definire la modalità nominale, ovvero la modalità di funzionamento a lungo termine, in cui il motore non si surriscalda oltre la temperatura impostata. Viene chiamato il momento M nominale, corrispondente al modo nominale. momento nominale. Lo scorrimento nominale corrispondente per motori asincroni di media potenza è s H0M = 0,02 ... 0,06, cioè la velocità nominale n e ohm è all'interno
n nom = n 0 (1 - s 0) \u003d (0,94 ... 0,98) p 0
Il rapporto tra la coppia massima e quella nominale rispetto a m = = Mmax / M nom è chiamato capacità di sovraccarico del motore asincrono. Di solito k m \u003d 1.8 ... .2.5.
All'avviamento, cioè all'avviamento e durante l'accelerazione, il motore asincrono si trova in condizioni significativamente diverse dalle condizioni di normale funzionamento. La coppia sviluppata dal motore deve superare il momento di resistenza del carico, altrimenti il motore non sarà in grado di accelerare. Pertanto, dal punto di vista dell'avviamento del motore, la sua coppia di spunto gioca un ruolo importante.
Il rapporto tra la coppia di avviamento M p sviluppata dal motore in uno stato stazionario, ovvero a n \u003d 0, e la coppia nominale k p \u003d M p / M nom è chiamato molteplicità della coppia di avviamento.
Il momento massimo M max è chiamato momento critico della macchina asincrona. Il funzionamento della macchina con una coppia superiore a quella nominale è possibile solo per un breve periodo, altrimenti la vita utile della macchina si riduce a causa del suo surriscaldamento.
Come risultato dell'interazione del flusso magnetico rotante con le correnti da esso indotte nei conduttori dell'avvolgimento del rotore, sorgono forze che agiscono su questi conduttori in direzione tangenziale. Troviamo il valore del momento creato da queste forze sull'albero della macchina.
La potenza elettromagnetica trasmessa al rotore dal campo magnetico rotante è pari a:
dove M ehm - momento elettromagnetico agendo sul rotore.
Secondo il circuito equivalente di una fase della macchina:
Da queste espressioni troviamo:
Data la corrente del rotore corrente, EMF, reattanza induttiva noi abbiamo:
Introduciamo una costante e tralasciando il momento di attrito, rappresentiamo l'espressione del momento sull'albero nella forma:
Se il flusso magnetico Ф è espresso in weber, la corrente I 2 - in ampere, la coppia sarà in newton metri (Nm).
La coppia della macchina dipende dal carico f, I 2 e , ma può essere rappresentato come una funzione di una variabile. In quanto tale variabile per un motore a induzione, è più conveniente scegliere lo scorrimento S.
Secondo le formule precedentemente studiate:
Supponendo che la frequenza di rete sia invariata, introduciamo
36. Metodi per regolare la velocità di rotazione dell'inferno con cortocircuito. rotore
37.Avviare e controllare la velocità di rotazione della pressione sanguigna con f.r.
La regolazione modificando lo scorrimento viene eseguita modificando la resistenza R p del reostato di regolazione nel circuito del rotore.
L'introduzione di un reostato nel circuito del rotore cambia la dipendenza della coppia M dallo scorrimento s senza influenzare l'entità della coppia massima. Tre caratteristiche M(s): la caratteristica naturale (non reostato) 1 corrisponde a un avvolgimento del rotore in cortocircuito (resistenza del reostato = 0), le caratteristiche reostatiche (artificiali) 2 e 3 corrispondono all'introduzione di uno e due stadi del reostato.
L'introduzione di un reostato nel circuito del rotore ha un effetto positivo sulla corrente di spunto, riducendola di circa 2 volte rispetto ad un IM in cortocircuito.
Gli svantaggi di questo metodo: 1) bassa efficienza a causa delle perdite nel reostato R p ; 2) riduzione della rigidità delle caratteristiche meccaniche; 3) la velocità può essere regolata solo verso il basso.
Avviare un motore asincrono con un rotore di fase. L'avviamento dei motori asincroni differisce notevolmente dalle condizioni di normale funzionamento. La coppia del motore all'avviamento deve superare la coppia di resistenza del carico, la coppia di avviamento gioca un ruolo. La seconda importante caratteristica di avviamento è la corrente di avviamento. Rapporto corrente di avviamento per motori con rotore a gabbia di scoiattolo arriva a 5-7, che può essere inaccettabile per il motore o per la rete, e può fare la differenza nella scorrevolezza della partenza. L'avviamento di un motore con rotore di fase avviene tramite un reostato trifase, ciascuna fase del quale è collegata tramite spazzole e anelli ad una delle fasi del rotore. All'inizio dell'avvio il reostato è completamente inserito, alla fine dell'avvio viene rimosso e tutte e tre le fasi del rotore vengono cortocircuitate. Si ritiene che il numero di fasi del reostato sia superiore a due e il processo di commutazione all'avvio è generalmente automatizzato. L'introduzione di resistenze attive nel circuito del rotore di fase aumenta la coppia, rende l'avviamento regolare e limita la corrente di avviamento. Questo metodo di avviamento presenta numerosi vantaggi, ma è applicabile solo ai motori con rotore di fase.
39.40. Dispositivo, principio di funzionamento del motore corrente continua. Metodi di eccitazione. EMF dell'avvolgimento dell'indotto e coppia elettromagnetica Progettazione e principio di funzionamento di un motore a corrente continua Un motore a corrente continua è costituito da una parte fissa - lo statore e una parte rotante - l'indotto, separate da un traferro. I principali poli aggiuntivi sono fissati alla superficie interna dello statore. I poli principali con avvolgimenti di eccitazione servono a creare il flusso magnetico principale F nella macchina e quelli aggiuntivi a ridurre le scintille.
L'armatura è costituita da un albero, un nucleo, un avvolgimento e un collettore. Il collettore contiene piastre di rame isolate l'una dall'altra, che sono collegate alle sezioni dell'avvolgimento dell'indotto. Le spazzole fisse sono sovrapposte al collettore; collegare l'avvolgimento dell'indotto con un circuito elettrico esterno. Come risultato dell'interazione della corrente di armatura Iya e del flusso magnetico Ф, viene creata una coppia, M = CmFIa, dove Cm è la costante di momento, che dipende dai dati di progetto della macchina. La coppia M del motore è bilanciata dal momento di resistenza Ms della macchina operatrice. Quando l'armatura ruota con una frequenza n, il suo avvolgimento attraversa il flusso magnetico Ф e in esso, secondo la legge dell'induzione elettromagnetica, viene indotto un contro-EMF E \u003d CeFp, dove Ce è una costante costruttiva.
La tensione all'armatura ezhimax U è uguale alla somma dell'EMF e della caduta di tensione attraverso la resistenza del circuito di ancoraggio U=E +RyaIya=CeFn, da cui la corrente di armatura Ia=(U-CeFn)/Rya, e il velocità n=(U-RyaIya)/CeF/
A seconda del metodo di alimentazione dell'avvolgimento di eccitazione, i generatori CC sono:
| a B C D) |
Riso. 50. Eccitazione del generatore: a - indipendente, b - parallela, c - seriale, d - mista.
In eccitazione indipendente OB è alimentato da una sorgente esterna. Viene utilizzato nei casi in cui è necessario regolare la corrente di eccitazione I in e la tensione U ai morsetti della macchina su un ampio intervallo. La corrente di armatura è uguale alla corrente di carico I I \u003d I n (Fig. 50, a)
I generatori autoeccitati hanno OB alimentati dal generatore stesso.
Quando l'OB viene acceso in parallelo con l'avvolgimento dell'indotto, abbiamo un generatore con eccitazione parallela(Fig. 50, b), in cui I \u003d I n + I c. Per macchine potenti di normale esecuzione, I in è solitamente dell'1-3% e per macchine piccole - fino a diverse decine di% della corrente di armatura. Per un generatore con eccitazione seriale (Fig. 50, c), l'ORP è collegato in serie con l'armatura, ad es.
io io \u003d io n \u003d io c.
I generatori con eccitazione mista hanno due avvolgimenti di eccitazione, l'OB è collegato in parallelo all'armatura e l'altro ORP è in serie (Fig. 50, d). Il principale è solitamente OB. L'ORP magnetizza la macchina con un aumento della corrente di carico, che compensa la caduta di tensione U nell'avvolgimento dell'indotto e l'effetto smagnetizzante della reazione dell'indotto.
La tensione U 1 applicata alla fase dell'avvolgimento dello statore è bilanciata dall'EMF principale E 1, dall'EMF di dispersione e dalla caduta di tensione attraverso la resistenza attiva dell'avvolgimento dello statore:
In un avvolgimento del rotore, un'equazione simile sarà simile a:
Ma poiché l'avvolgimento del rotore è chiuso, la tensione U 2 \u003d 0 e se teniamo anche conto che E 2s \u003d SE 2 e x 2s \u003d Sx 2, l'equazione può essere riscritta come:
![]()
L'equazione per le correnti di un motore a induzione ripete un'equazione simile per un trasformatore:
28 Coppia motore asincrono
La coppia in un motore a induzione è creata dall'interazione della corrente del rotore con il campo magnetico della macchina. La coppia può essere espressa matematicamente in termini di potenza elettromagnetica della macchina:
dove w 1 =2pn 1 /60 - frequenza angolare di rotazione del campo. Nel suo turno, n 1 =f 1 60/R, poi
![]()
Sostituisci nella formula M 1 espressione Rem=Pe2/S e, dividendo per 9,81, otteniamo:
![]()
Equazione della coppia del motore a induzione
Ne consegue che la coppia del motore è proporzionale alle perdite elettriche nel rotore. Sostituisci nell'ultima formula il valore corrente io 2 ’ :
otteniamo l'equazione per la coppia di un motore a induzione:
dove u 1 - tensione di fase dell'avvolgimento statorico.
29 .Caratteristica meccanica del motoreè chiamata dipendenza della velocità del rotore dalla coppia sull'albero n = f (M2). Poiché la coppia al minimo è piccola sotto carico, allora M2 ≈ M e caratteristica meccanicaè rappresentato dalla dipendenza n = f (M). Se prendiamo in considerazione la relazione s = (n1 - n) / n1, allora la caratteristica meccanica può essere ottenuta presentando la sua dipendenza grafica nelle coordinate n e M (Fig. 1).
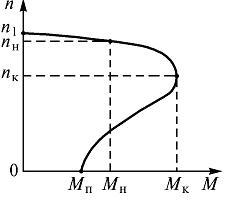
Riso. 1. Caratteristica meccanica del motore asincrono
Caratteristica meccanica naturale di un motore a induzione corrisponde al circuito principale (passaporto) della sua inclusione e ai parametri nominali della tensione di alimentazione. Caratteristiche artificiali si ottengono se sono inclusi elementi aggiuntivi: resistori, reattanze, condensatori. Quando il motore è alimentato con una tensione non nominale, le caratteristiche differiscono anche dalla naturale caratteristica meccanica.
Le caratteristiche meccaniche sono molto convenienti e attrezzo utile nell'analisi dei modi statici e dinamici dell'azionamento elettrico.
30 Caratteristiche meccaniche e autoregolazione del motore. Il grafico che collega le grandezze meccaniche - velocità e coppia - è chiamato caratteristica meccanica di un motore a induzione (Fig. 7) n = ƒ(M). L'autoregolazione di un motore asincrono è la seguente. Lascia che il motore funzioni costantemente in alcune modalità, sviluppando la velocità n1 e la coppia M1. Con rotazione uniforme, questo momento è uguale alla coppia frenante M t1, cioè. M1=M t 1, n1= cons. L'aumento della coppia frenante a M2 provoca una diminuzione della velocità della macchina, poiché la coppia frenante diventerà maggiore della coppia. Con una diminuzione della velocità, lo scorrimento aumenta, che a sua volta provoca un aumento dell'EMF e della corrente nel rotore. Ciò aumenta la coppia del motore. Questo processo termina quando la coppia M2 sviluppata dal motore diventa uguale a M t 2. In questo caso, la velocità di rotazione è impostata a un valore inferiore a n1. Viene chiamata la proprietà dell'equilibrio automatico tra frenatura e coppia autoregolamentazione.
Su un supporto da laboratorio, il motore è caricato con un freno elettrico, costituito da un elettromagnete, nella cui fessura ruota un disco, piantato sull'albero del motore. Modificando la tensione che alimenta la bobina dell'elettromagnete con la maniglia dell'autotrasformatore, è possibile modificare la forza frenante, il cui momento è: M TORM \u003d F r (N m)
dove F è la forza (forza) agente sulla circonferenza della puleggia, (N);
r - raggio puleggia, pari a 0,18 M. Potenza utile sull'albero motore:
dove n- velocità di rotazione del motore, giri/min.
dove ƒ - frequenza di rete (pari a 50 Hz),
R- numero di coppie di poli dell'avvolgimento statorico (pari a 2).
n 1 - velocità sincrona della rotazione campo magnetico.
La velocità del motore è determinata utilizzando un contagiri. Lo slittamento è calcolato con la formula:
31 Caratteristiche operative chiamato dipendenze di potere, consumata dal motore, corrente I consumata, fattore di potenza, velocità del motore, rendimento e coppia M dalla potenza utile del motore data all'albero. Le caratteristiche prestazionali determinano le proprietà prestazionali di base di un motore a induzione. Le caratteristiche prestazionali di un motore a induzione di media potenza sono mostrate in fig. 8.8. Il loro comportamento è spiegato come segue. Con carichi leggeri, la corrente del motore I (corrente a vuoto) può essere compresa tra il 20% e il 70% della corrente nominale. All'aumentare del carico, la corrente nel circuito del rotore aumenta, il che porta ad un aumento quasi proporzionale della corrente io nel circuito dello statore.

Fig.8.8 Coppia del motore () è anche quasi proporzionale al carico, ma a carichi elevati la linearità del grafico viene alquanto violata riducendo il regime del motore. La caratteristica di prestazione esprime il rapporto tra la potenza sviluppata dal motore e lo sfasamento tra la corrente e la tensione dello statore. Un motore asincrono, come un trasformatore, consuma una corrente I dalla rete, che è notevolmente sfasata rispetto alla tensione applicata. Ad esempio, in modalità inattiva. Con un aumento del carico sull'albero motore, i componenti attivi del rotore e le correnti dello statore aumentano, aumentando . Il valore massimo viene raggiunto a .
Con un ulteriore aumento, il valore diminuirà leggermente. Ciò è dovuto ad un aumento dello scorrimento s, che provoca un aumento della reattanza dell'avvolgimento del rotore e, di conseguenza, lo sfasamento . DA aumenta e aumenta, cioè diminuirà.
Comportamento caratteristica operativaè spiegato come segue. Il valore dell'efficienza è determinato dal rapporto tra la potenza utile e la potenza consumata dalla rete.
Il valore è chiamato perdita di potenza. Oltre alle perdite nell'acciaio dello statore e del rotore dovute all'inversione della magnetizzazione e alle correnti parassite, che, insieme alle perdite meccaniche, possono essere considerate costanti, in un motore asincrono si hanno perdite di rame. ,
quelli. negli avvolgimenti dello statore e del rotore, che sono proporzionali al quadrato della corrente che scorre e quindi dipendenti dal carico. Durante il minimo, come in un trasformatore, predominano le perdite nell'acciaio, poiché, ed è uguale alla corrente a vuoto, che è piccola. Con piccoli carichi sull'albero, le perdite nel rame rimangono comunque piccole, e quindi il rendimento determinato dalla formula ![]() (8.5)
(8.5)
all'inizio aumenta bruscamente. Quando le perdite fisse diventano uguali alle perdite dipendenti dal carico , efficienza raggiunge il suo valore massimo. Con un ulteriore aumento del carico, le perdite di potenza variabili aumentano notevolmente, per cui l'efficienza diminuisce notevolmente. La natura della dipendenza ) può essere spiegato dalla relazione . Se l'efficienza era costante, allora ci sarebbe una relazione lineare tra e. Ma poiché l'efficienza dipende e questa dipendenza inizialmente aumenta bruscamente, e con un ulteriore aumento del carico cambia leggermente, quindi la curva ) prima aumenta lentamente, quindi aumenta bruscamente.
32 A qualsiasi circuito elettrico la somma delle potenze di tutte le fonti di energia elettrica deve essere uguale alla somma delle potenze di tutti i ricevitori ed elementi ausiliari. Dopo aver ottenuto le espressioni di potenza, è possibile scrivere in forma generale l'equazione di bilancio di potenza per qualsiasi circuito elettrico:
Σ e → io → + Σ u ← io → = Σ e ← io → + Σ u → io → + Σ io 2 r.
L'equazione (1.35) può essere scritta sia per le direzioni, tensioni e correnti EMF reali, sia per il caso in cui alcune di esse siano direzioni positive scelte arbitrariamente. Nel primo caso, tutti i termini in esso contenuti saranno positivi e gli elementi corrispondenti del circuito saranno effettivamente sorgenti o ricevitori di energia elettrica. Se, invece, alcuni termini sono scritti rispetto a direzioni positive scelte arbitrariamente, gli elementi corrispondenti devono essere considerati come fonti e ricevitori previsti. A seguito di calcoli o analisi, alcuni di essi potrebbero risultare negativi. Ciò significa che alcune delle presunte sorgenti sono in realtà un sink e alcuni dei presunti sink sono una fonte.
33 Avviare un motore asincronoè accompagnato da un processo transitorio della macchina associato al passaggio del rotore da uno stato di riposo ad uno stato di rotazione uniforme, in cui la coppia motrice bilancia il momento delle forze di resistenza sull'albero della macchina. All'avviamento di un motore asincrono si ha un maggiore consumo di energia elettrica dalla rete di alimentazione, che viene spesa non solo per il superamento della coppia frenante applicata all'albero e per la copertura delle perdite del motore asincrono stesso, ma anche per comunicare una certa energia cinetica alle parti mobili dell'unità di produzione. Pertanto, all'avvio, un motore asincrono deve sviluppare una coppia maggiore. Per motore asincrono con rotore di fase la coppia iniziale di spunto, corrispondente allo scorrimento sp = 1, dipende dalle resistenze attive delle resistenze regolabili introdotte nel circuito del rotore.
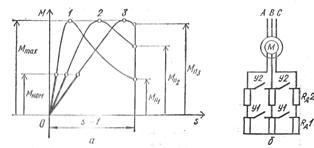
Riso. 1. Avviamento di un motore asincrono trifase con un rotore di fase: a - grafici della dipendenza della coppia del motore con un rotore di fase sullo scorrimento a varie resistenze attive dei resistori nel circuito del rotore, b - diagramma dell'inclusione di resistori e contatti di chiusura dell'accelerazione nel circuito del rotore. Quindi, con contatti di accelerazione chiusi U1, U2, cioè quando si avvia un motore asincrono con anelli di contatto in corto, la coppia di spunto iniziale Mp1 = (0,5 -1,0) Mnom e la corrente di spunto iniziale Ip = (4,5 - 7) Inom e altro. Piccola coppia di spunto motore asincrono con un rotore avvolto potrebbe non essere sufficiente per azionare l'unità di produzione e quindi accelerarla, e una corrente di avviamento significativa provocherà un aumento del riscaldamento avvolgimenti del motore, che limita la frequenza della sua accensione, e nelle reti a bassa potenza provoca una caduta di tensione temporanea indesiderabile per il funzionamento di altri ricevitori. Queste circostanze possono essere la ragione che esclude l'uso di motori asincroni con un rotore di fase con una grande corrente di avviamento per azionare meccanismi di lavoro. L'introduzione di resistori regolabili, detti resistori di avviamento, nel circuito del rotore del motore non solo riduce la corrente di avviamento iniziale, ma allo stesso tempo aumenta la coppia di avviamento iniziale, che può raggiungere la coppia massima Mmax (Fig. 1, a, curva 3 ), se lo scorrimento critico del motore con un rotore di fase scr \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, dove Rd" è la resistenza attiva del resistore situato nella fase del avvolgimento del rotore del motore, ridotto alla fase dell'avvolgimento dello statore. Un ulteriore aumento della resistenza attiva del resistore di avviamento non è pratico, poiché porta ad un indebolimento della coppia iniziale di avviamento e all'uscita del punto di coppia massima nella regione di scorrimento s > 1, che esclude la possibilità di accelerazione del rotore. La resistenza attiva richiesta dei resistori per avviare un motore con un rotore di fase è determinata in base ai requisiti dell'avvio, che può essere facile quando Mp = (0,1 - 0,4) Mnom, normale se Mp - (0,5 - 0,75) Mnom, e pesante a Mp ≥ Mnom. Per mantenere una coppia sufficientemente elevata da parte del motore con rotore di fase durante l'accelerazione dell'unità di produzione in modo da ridurre la durata del processo transitorio e ridurre il riscaldamento del motore, è necessario ridurre gradualmente la resistenza attiva di le resistenze di avviamento. La variazione di coppia ammissibile durante l'accelerazione M(t) è determinata dalle condizioni elettriche e meccaniche che limitano il limite di coppia di picco M > 0,85 Mmax, la coppia di commutazione M2 > > Ms (Fig. 2), nonché l'accelerazione.

Riso. 2. Caratteristiche di avviamento di un motore asincrono trifase con rotore di fase. La commutazione delle resistenze di avviamento è fornita dall'accensione successiva dei contattori di accelerazione Y1, Y2, rispettivamente, nei punti di tempo t1, t2 contati dal momento di avviamento del motore, quando durante l'accelerazione la coppia M diventa uguale al momento di commutazione M2. Per questo motivo, durante l'intero avviamento, tutte le coppie di picco sono le stesse e tutte le coppie di commutazione sono uguali tra loro. Poiché la coppia e la corrente di un motore asincrono con rotore di fase sono correlate, è possibile impostare il limite di corrente di picco I1 \u003d (1,5 - 2,5) Inom e la corrente di commutazione I2 durante l'accelerazione del rotore, che dovrebbe fornire il momento di commutazione M2\u003e Mc. La disconnessione dei motori asincroni con rotore di fase dalla rete di alimentazione avviene sempre con il circuito del rotore in cortocircuito, al fine di evitare sovratensioni nelle fasi dell'avvolgimento statorico, che possono superare di 3-4 volte la tensione nominale di queste fasi , se il circuito del rotore al momento dello spegnimento del motore è aperto.
34 Regolazione della frequenza. Questo metodo di controllo della velocità consente l'utilizzo dei motori asincroni più affidabili ed economici con rotore a gabbia di scoiattolo. Tuttavia, per modificare la frequenza della tensione di alimentazione, è necessaria una sorgente di corrente elettrica a frequenza variabile. Come quest'ultimo, vengono utilizzati sia generatori sincroni a velocità variabile, sia convertitori di frequenza - elettrici o statici, realizzati su valvole a semiconduttore controllate (tiristori). Attualmente, i convertitori di frequenza hanno un circuito piuttosto complesso e un costo relativamente elevato. Tuttavia, il rapido sviluppo della tecnologia dei semiconduttori di potenza consente di sperare in un ulteriore miglioramento dei convertitori di frequenza, che apre prospettive per ampia applicazione regolazione della frequenza. Una descrizione dettagliata delle leggi di controllo per la regolazione della frequenza e un'analisi del funzionamento di un motore asincrono quando alimentato da un convertitore di frequenza sono fornite in § 4.13 e 4.14. Regolazione modificando il numero di poli. Questa regolazione permette di ottenere un cambio graduale di velocità. Sulla fig. 4.35 mostrato il circuito più semplice(per una fase), che consente di modificare due volte il numero di poli dell'avvolgimento dello statore. Per fare ciò, ogni fase dell'avvolgimento dello statore è divisa in due parti, che vengono commutate dal collegamento in serie al parallelo. Si può vedere dalla figura che quando le bobine 1-2 e 3-4 vengono accese in due rami paralleli, il numero di poli viene dimezzato e, di conseguenza, la frequenza di rotazione del campo magnetico viene raddoppiata. Durante la commutazione, il numero di spire collegate in serie in ciascuna fase viene dimezzato, ma poiché la velocità di rotazione raddoppia, l'EMF indotto nella fase rimane invariato. Pertanto, il motore a entrambe le velocità può essere collegato alla rete con la stessa tensione. Per non attivare l'avvolgimento del rotore, viene eseguito quest'ultimo cortocircuitato. Se è necessario avere tre o quattro velocità, sullo statore viene posizionato un altro avvolgimento, commutando il quale è possibile ottenere altre due frequenze. Si chiamano motori a induzione a poli commutabili multivelocità. Regolazione mediante l'inclusione di un reostato nel circuito del rotore. Quando nel circuito del rotore sono incluse resistenze attive aggiuntive R est1 , R est2, R add3 e altri modificano la forma della dipendenza M = f(i) e caratteristiche meccaniche n 2 = f(M) motore (Fig. 4.37, a). Allo stesso tempo, qualche momento di carico M n scontrino della partita S 1 , S 2 , S 3 , ..., più grande degli slip S e , quando il motore gira su una caratteristica naturale (quando R est = 0). Pertanto, il regime del motore in regime stazionario diminuisce da n e prima P 1 P 2 , P 3 ,... (Fig. 4.37, b). Questo metodo di controllo può essere utilizzato solo per i motori ad anelli. Ti consente di modificare senza problemi la velocità su un'ampia gamma. I suoi svantaggi sono: a) grandi perdite di energia nel reostato di controllo; b) caratteristiche meccaniche eccessivamente "morbide" del motore con elevata resistenza nel circuito del rotore. In alcuni casi, quest'ultimo è inaccettabile, poiché una piccola variazione della coppia di carico corrisponde a una variazione significativa della velocità.
35 Generatore asincrono- si tratta di una macchina elettrica asincrona (motore el.) funzionante in modalità generatore. Con l'aiuto di un motore di azionamento (nel nostro caso, una turbina eolica), il rotore di un generatore elettrico asincrono ruota nella stessa direzione del campo magnetico. In questo caso, lo scorrimento del rotore diventa negativo, una coppia frenante appare sull'albero della macchina asincrona e il generatore trasferisce energia alla rete. Per l'eccitazione forza elettromotiva il suo circuito di uscita utilizza la magnetizzazione residua del rotore. Per questo vengono utilizzati condensatori. I generatori asincroni non sono soggetti a cortocircuiti. Un generatore asincrono è più semplice di uno sincrono (ad esempio, generatore per auto): se quest'ultimo ha degli induttori posti sul rotore, allora il rotore del generatore asincrono si presenta come un volano convenzionale. Un tale generatore è meglio protetto da sporco e umidità, più resistente a corto circuito e sovraccarichi e la tensione di uscita del generatore asincrono ha un grado inferiore di distorsione non lineare. Ciò consente di utilizzare generatori asincroni non solo per alimentare dispositivi industriali non critici per la forma della tensione di ingresso, ma anche per collegare apparecchiature elettroniche. Si tratta di un generatore elettrico asincrono, fonte di corrente ideale per dispositivi con carico attivo (ohmico): resistenze elettriche, convertitori di saldatura, lampade ad incandescenza, dispositivi elettronici, ingegneria informatica e radiofonica. Vantaggi di un generatore asincrono. Questi vantaggi includono un basso fattore di chiaro (coefficiente armonico), che caratterizza la presenza quantitativa di armoniche più elevate nella tensione di uscita del generatore. Armoniche più elevate causano una rotazione irregolare e un riscaldamento inutile dei motori elettrici. I generatori sincroni possono avere un fattore di compensazione fino al 15% e il fattore di compensazione di un generatore asincrono non supera il 2%. Pertanto, un generatore elettrico asincrono produce praticamente solo energia utile. Un altro vantaggio di un generatore asincrono è che manca completamente di avvolgimenti rotanti e parti elettroniche sensibili alle influenze esterne e abbastanza spesso soggette a danni. Ecco perchè generatore asincrono poca usura e può servire per molto tempo. All'uscita dei nostri generatori c'è subito la 220/380V AC, che può essere utilizzata direttamente per gli elettrodomestici (es. stufe), per caricare le batterie, per collegarsi ad una segheria, e anche per il funzionamento in parallelo con una rete tradizionale. In questo caso pagherai la differenza consumata dalla rete e generata dal mulino a vento. Perché Poiché la tensione arriva immediatamente ai parametri industriali, non avrai bisogno di vari convertitori (inverter) quando il generatore eolico è direttamente collegato al tuo carico. Ad esempio puoi collegarti direttamente ad una segheria e, in presenza di vento, lavorare come se fossi semplicemente connesso ad una rete 380V. Come sapete, per ridurre i tempi di frenata durante l'arresto di macchine e meccanismi di produzione, vengono spesso utilizzati freni meccanici. La riduzione del tempo di frenatura, soprattutto nel caso di un ciclo di lavoro breve, porta ad un notevole aumento della produttività di macchine e meccanismi. Gli svantaggi dei freni meccanici sono la rapida usura delle superfici di sfregamento, la complessità e la necessità di una regolazione periodica della forza frenante, la necessità di spazio aggiuntivo per posizionare il freno e il suo collegamento al meccanismo. Tutti gli inconvenienti di cui sopra vengono eliminati se, per gli scopi indicati, al posto del freno meccanico, si utilizzano le proprietà dei motori elettrici per lavorare in modalità frenante, cioè per funzionare essenzialmente come generatore e sviluppare non una coppia, ma un coppia frenante. In molte macchine di sollevamento e trasporto (gru, ascensori, scale mobili, ecc.), dove è possibile il movimento per gravità, è assicurata una velocità costante e costante di abbassamento dei carichi utilizzando la coppia frenante del motore elettrico. I motori a corrente continua possono funzionare in tre modalità di frenatura:
In modalità opposizione;
In modalità generatore con uscita di energia in rete;
In modalità frenata dinamica.
In una qualsiasi delle modalità di frenatura, il motore elettrico funziona come un generatore, converte, ad esempio, l'energia cinetica delle parti mobili o l'energia potenziale di un carico discendente in energia elettrica.
36 Quando il motore viene invertito in marcia spostando l'interruttore, si verifica prima la frenata da una data velocità a zero, quindi l'accelerazione nell'altra direzione. Tale frenatura può essere utilizzata anche per frenare durante il cosiddetto opposizione. Durante questa inversione o frenata, un motore a induzione a gabbia di scoiattolo ha correnti significative. Pertanto, in base alle condizioni di riscaldamento di questi motori, il numero di inversioni all'ora non supera le decine. Per limitare le correnti e aumentare le coppie, viene introdotta una resistenza nel circuito del rotore di fase di un motore asincrono. Consideriamo tre modi principali di frenatura elettrica dei motori asincroni. Frenare per opposizione, come indicato, viene eseguita a motore acceso in movimento. In questo caso, il campo magnetico ruota nella direzione opposta rispetto al senso di rotazione del motore e la coppia del motore sta frenando - agisce contro il senso di rotazione. Frenatura del generatore avviene quando si cambia un motore multivelocità in movimento da una velocità superiore a una inferiore, ad es. quando si cambia la macchina da un numero di poli inferiore a uno maggiore. Al primo momento della commutazione, la velocità del motore risulta essere molto maggiore della velocità del suo campo, ovvero lo scorrimento risulta negativo e la macchina passa alla modalità generatore. La frenatura avviene con la trasformazione dell'energia cinetica delle parti rotanti in energia elettrica, che meno le perdite nella macchina viene data alla rete. Il freno del generatore può anche essere nel sollevatore quando si abbassa un carico pesante, accelerando il motore a una velocità superiore a quella sincrona; quindi la macchina inizia a dare alla rete l'energia che le viene impartita dal carico discendente. La frenatura del generatore è possibile solo a velocità sovrasincrona. Se è necessario arrestare il motore al termine della frenata, quindi entro la fine della frenata si deve passare alla frenatura meccanica o ad un altro tipo di frenatura elettrica (dinamica, a controcommutazione). Il fissaggio della posizione alla fine, se necessario, viene effettuato solo con l'ausilio di un freno meccanico. In frenata dinamica l'avvolgimento dello statore del motore è scollegato da rete trifase ed è inserito nella rete delle correnti alternate continue o monofase. In questo caso sono possibili vari modi per collegare le fasi dell'avvolgimento dello statore. L'avvolgimento dello statore, alimentato da corrente continua, crea un campo magnetico stazionario. Proprio come durante il normale funzionamento del motore, il suo campo rotante trascina con sé il rotore, un campo stazionario durante la frenata dinamica provoca l'arresto rapido del rotore. Energia cinetica le parti rotanti vengono convertite in calore rilasciato nel circuito del rotore a causa delle correnti indotte in esso dal campo fisso dello statore. La fluidità della frenatura è garantita dalla regolazione della tensione ai terminali dello statore.La coppia frenante del motore con rotore di fase può essere regolata anche da un reostato nel circuito del rotore. Lo svantaggio della frenatura dinamica è la necessità di una sorgente CC a bassa tensione.
37 Macchina sincrona- questa è una macchina elettrica a corrente alternata, la cui velocità del rotore è uguale alla frequenza di rotazione del campo magnetico nel traferro. Le parti principali di una macchina sincrona sono l'armatura e l'induttore. Il design più comune è quello in cui l'indotto si trova sullo statore e c'è un induttore sul rotore separato da esso da un traferro. Un'armatura è uno o più avvolgimenti CA. Nei motori, le correnti fornite all'indotto creano un campo magnetico rotante che si accoppia con il campo dell'induttore e quindi l'energia viene convertita. Il campo di armatura interessa il campo dell'induttore ed è quindi anche chiamato campo di reazione dell'ancora. Nei generatori viene creato il campo di reazione dell'ancora correnti alternate indotto nell'avvolgimento dell'indotto dall'induttore. L'induttore è costituito da poli: elettromagneti CC o magneti permanenti (nelle micromacchine). Gli induttori per macchine sincrone sono disponibili in due diversi modelli: polo saliente o polo non saliente. Una macchina a poli salienti si distingue per il fatto che i poli sono pronunciati e hanno un design simile ai poli di una macchina a corrente continua. Con un design a polo implicito, l'avvolgimento di eccitazione si inserisce nelle fessure del nucleo dell'induttore, molto simile all'avvolgimento dei rotori di macchine asincrone con rotore di fase, con l'unica differenza che tra i poli viene lasciato uno spazio che non è pieno di conduttori (il cosiddetto grande dente). I design dei poli non salienti vengono utilizzati nelle macchine ad alta velocità per ridurre il carico meccanico sui poli. Per ridurre la resistenza magnetica, cioè per migliorare il passaggio del flusso magnetico, vengono utilizzati nuclei ferromagnetici del rotore e dello statore. Fondamentalmente, sono una struttura in acciaio elettrico laminato (cioè assemblato da fogli separati). L'acciaio elettrico ha una serie di proprietà interessanti. In particolare ha un alto contenuto di silicio per aumentarne la resistenza elettrica e quindi ridurre le correnti parassite.
L'azione di un campo magnetico su una bobina che trasporta corrente consente di utilizzarlo per determinare modulo a induzione magnetica. Ruotare una bobina in un campo magnetico indica che almeno due forze agiscono su di essa. La risultante di queste forze sarà applicata ai punti A e B (Fig. 6.8). Coppia, agendo sulla bobina, sarà uguale al prodotto di una di queste forze F al raggio di svolta r. Questo punto non ha bisogno di essere calcolato. Può essere misurato utilizzando una molla elicoidale o un altro dispositivo sensibile per misurare la coppia meccanica collegata alla bobina.
Gli esperimenti mostrano che una bobina con corrente in un campo magnetico ruota sempre in modo che la direzione della sua normale n coincide con la direzione dell'induzione magnetica del campo in esame B. Ovviamente, in questo caso, la coppia sarà zero. Avrà un valore massimo quando l'angolo tra l'induzione magnetica B e normale n sarà 90°.
L'induzione magnetica può essere determinata dall'azione della forza di un campo magnetico su una corrente con una corrente.
Senza modificare la forza di corrente nel conduttore, indaghiamo come dipende il valore coppia massima dai parametri della bobina.
Dopo aver posizionato la bobina ad una certa distanza dal conduttore di corrente, misuriamo la coppia massima Mmax per un certo valore di corrente in una bobina io 1. Raddoppiamo la corrente nella bobina. In Io 2 = 2io 1 il momento meccanico massimo sarà uguale a M max 2 = 2M max 1. Lo stesso si osserverà con un aumento della forza attuale di 3, 4, 5 volte. In questo modo, valore di coppia massima, che agisce sulla bobina con corrente, sarà proporzionale alla corrente nella bobina
Mmax ~io vit.
Coppia , agendo su una bobina in un campo magnetico, è proporzionale all'intensità della corrente in essa contenuta.materiale dal sito
Se sostituiamo questa bobina con un'altra, con un'area più grande o più piccola S vit, noteremo un corrispondente aumento o diminuzione del valore della coppia massima. In questo modo,
coppia massima , che agisce su una bobina in un campo magnetico, è proporzionale alla sua area:
Mmax ~S vit.
Combinando i risultati di entrambe le fasi della ricerca, otteniamo
Mmax ~io vit.S vit.
In questa pagina, materiale sugli argomenti:
La tensione U 1 applicata alla fase dell'avvolgimento dello statore è bilanciata dall'EMF principale E 1, dall'EMF di dispersione e dalla caduta di tensione attraverso la resistenza attiva dell'avvolgimento dello statore:
In un avvolgimento del rotore, un'equazione simile sarà simile a:
Ma poiché l'avvolgimento del rotore è chiuso, la tensione U 2 \u003d 0 e se teniamo anche conto che E 2s \u003d SE 2 e x 2s \u003d Sx 2, l'equazione può essere riscritta come:
![]()
L'equazione per le correnti di un motore a induzione ripete un'equazione simile per un trasformatore:
28 Coppia motore asincrono
La coppia in un motore a induzione è creata dall'interazione della corrente del rotore con il campo magnetico della macchina. La coppia può essere espressa matematicamente in termini di potenza elettromagnetica della macchina:
dove w 1 =2pn 1 /60 - frequenza angolare di rotazione del campo. Nel suo turno, n 1 =f 1 60/R, poi
![]()
Sostituisci nella formula M 1 espressione Rem=Pe2/S e, dividendo per 9,81, otteniamo:
![]()
Equazione della coppia del motore a induzione
Ne consegue che la coppia del motore è proporzionale alle perdite elettriche nel rotore. Sostituisci nell'ultima formula il valore corrente io 2 ’ :
otteniamo l'equazione per la coppia di un motore a induzione:
dove u 1 - tensione di fase dell'avvolgimento statorico.
29 .Caratteristica meccanica del motoreè chiamata dipendenza della velocità del rotore dalla coppia sull'albero n = f (M2). Poiché la coppia a vuoto è piccola sotto carico, allora M2 ≈ M e la caratteristica meccanica è rappresentata dalla dipendenza n = f (M). Se prendiamo in considerazione la relazione s = (n1 - n) / n1, allora la caratteristica meccanica può essere ottenuta presentando la sua dipendenza grafica nelle coordinate n e M (Fig. 1).
Riso. 1. Caratteristica meccanica del motore asincrono
Caratteristica meccanica naturale di un motore a induzione corrisponde al circuito principale (passaporto) della sua inclusione e ai parametri nominali della tensione di alimentazione. Caratteristiche artificiali si ottengono se sono inclusi elementi aggiuntivi: resistori, reattanze, condensatori. Quando il motore è alimentato con una tensione non nominale, le caratteristiche differiscono anche dalla naturale caratteristica meccanica.
Le caratteristiche meccaniche sono uno strumento molto comodo e utile nell'analisi delle modalità statiche e dinamiche dell'azionamento elettrico.
30 Caratteristiche meccaniche e autoregolazione del motore. Il grafico che collega le grandezze meccaniche - velocità e coppia - è chiamato caratteristica meccanica di un motore a induzione (Fig. 7) n = ƒ(M). L'autoregolazione di un motore asincrono è la seguente. Lascia che il motore funzioni costantemente in alcune modalità, sviluppando la velocità n1 e la coppia M1. Con rotazione uniforme, questo momento è uguale alla coppia frenante M t1, cioè. M1=M t 1, n1= cons. L'aumento della coppia frenante a M2 provoca una diminuzione della velocità della macchina, poiché la coppia frenante diventerà maggiore della coppia. Con una diminuzione della velocità, lo scorrimento aumenta, che a sua volta provoca un aumento dell'EMF e della corrente nel rotore. Ciò aumenta la coppia del motore. Questo processo termina quando la coppia M2 sviluppata dal motore diventa uguale a M t 2. In questo caso, la velocità di rotazione è impostata a un valore inferiore a n1. Viene chiamata la proprietà dell'equilibrio automatico tra frenatura e coppia autoregolamentazione.
Su un supporto da laboratorio, il motore è caricato con un freno elettrico, costituito da un elettromagnete, nella cui fessura ruota un disco, piantato sull'albero del motore. Modificando la tensione che alimenta la bobina dell'elettromagnete con la maniglia dell'autotrasformatore, è possibile modificare la forza frenante, il cui momento è: M TORM \u003d F r (N m)
dove F è la forza (forza) agente sulla circonferenza della puleggia, (N);
r - raggio puleggia, pari a 0,18 M. Potenza utile sull'albero motore:
dove n- velocità di rotazione del motore, giri/min.
dove ƒ - frequenza di rete (pari a 50 Hz),
R- numero di coppie di poli dell'avvolgimento statorico (pari a 2).
n 1 - velocità sincrona del campo magnetico rotante.
La velocità del motore è determinata utilizzando un contagiri. Lo slittamento è calcolato con la formula:
31 Caratteristiche operative chiamano le dipendenze della potenza consumata dal motore, la corrente consumata I, fattore di potenza, regime del motore, efficienza e coppia M dalla potenza utile del motore sprigionata sull'albero. Le caratteristiche prestazionali determinano le proprietà prestazionali di base di un motore a induzione. Le caratteristiche prestazionali di un motore a induzione di media potenza sono mostrate in fig. 8.8. Il loro comportamento è spiegato come segue. Con carichi leggeri, la corrente del motore I (corrente a vuoto) può essere compresa tra il 20% e il 70% della corrente nominale. All'aumentare del carico, la corrente nel circuito del rotore aumenta, il che porta ad un aumento quasi proporzionale della corrente io nel circuito dello statore.
Fig.8.8 Coppia del motore () è anche quasi proporzionale al carico, ma a carichi elevati la linearità del grafico viene alquanto violata riducendo il regime del motore. La caratteristica di prestazione esprime il rapporto tra la potenza sviluppata dal motore e lo sfasamento tra la corrente e la tensione dello statore. Un motore asincrono, come un trasformatore, consuma una corrente I dalla rete, che è notevolmente sfasata rispetto alla tensione applicata. Ad esempio, in modalità inattiva. Con un aumento del carico sull'albero motore, i componenti attivi del rotore e le correnti dello statore aumentano, aumentando . Il valore massimo viene raggiunto a .
Con un ulteriore aumento, il valore diminuirà leggermente. Ciò è dovuto ad un aumento dello scorrimento s, che provoca un aumento della reattanza dell'avvolgimento del rotore e, di conseguenza, lo sfasamento . DA aumenta e aumenta, cioè diminuirà.
Il comportamento della caratteristica operativa è spiegato come segue. Il valore dell'efficienza è determinato dal rapporto tra la potenza utile e la potenza consumata dalla rete.
Il valore è chiamato perdita di potenza. Oltre alle perdite nell'acciaio dello statore e del rotore dovute all'inversione della magnetizzazione e alle correnti parassite, che, insieme alle perdite meccaniche, possono essere considerate costanti, in un motore asincrono si hanno perdite di rame. ,
quelli. negli avvolgimenti dello statore e del rotore, che sono proporzionali al quadrato della corrente che scorre e quindi dipendenti dal carico. Durante il minimo, come in un trasformatore, predominano le perdite nell'acciaio, poiché, ed è uguale alla corrente a vuoto, che è piccola. Con piccoli carichi sull'albero, le perdite nel rame rimangono comunque piccole, e quindi il rendimento determinato dalla formula ![]() (8.5)
(8.5)
all'inizio aumenta bruscamente. Quando le perdite fisse diventano uguali alle perdite dipendenti dal carico , efficienza raggiunge il suo valore massimo. Con un ulteriore aumento del carico, le perdite di potenza variabili aumentano notevolmente, per cui l'efficienza diminuisce notevolmente. La natura della dipendenza ) può essere spiegato dalla relazione . Se l'efficienza era costante, allora ci sarebbe una relazione lineare tra e. Ma poiché l'efficienza dipende e questa dipendenza inizialmente aumenta bruscamente, e con un ulteriore aumento del carico cambia leggermente, quindi la curva ) prima aumenta lentamente, quindi aumenta bruscamente.
32 In ogni circuito elettrico, la somma delle potenze di tutte le fonti di energia elettrica deve essere uguale alla somma delle potenze di tutti i ricevitori e di tutti gli elementi ausiliari. Dopo aver ottenuto le espressioni di potenza, è possibile scrivere in forma generale l'equazione di bilancio di potenza per qualsiasi circuito elettrico:
Σ e → io → + Σ u ← io → = Σ e ← io → + Σ u → io → + Σ io 2 r.
L'equazione (1.35) può essere scritta sia per le direzioni, tensioni e correnti EMF reali, sia per il caso in cui alcune di esse siano direzioni positive scelte arbitrariamente. Nel primo caso, tutti i termini in esso contenuti saranno positivi e gli elementi corrispondenti del circuito saranno effettivamente sorgenti o ricevitori di energia elettrica. Se, invece, alcuni termini sono scritti rispetto a direzioni positive scelte arbitrariamente, gli elementi corrispondenti devono essere considerati come fonti e ricevitori previsti. A seguito di calcoli o analisi, alcuni di essi potrebbero risultare negativi. Ciò significa che alcune delle presunte sorgenti sono in realtà un sink e alcuni dei presunti sink sono una fonte.
33 Avviare un motore asincronoè accompagnato da un processo transitorio della macchina associato al passaggio del rotore da uno stato di riposo ad uno stato di rotazione uniforme, in cui la coppia motrice bilancia il momento delle forze di resistenza sull'albero della macchina. All'avviamento di un motore asincrono si ha un maggiore consumo di energia elettrica dalla rete di alimentazione, che viene spesa non solo per il superamento della coppia frenante applicata all'albero e per la copertura delle perdite del motore asincrono stesso, ma anche per comunicare una certa energia cinetica alle parti mobili dell'unità di produzione. Pertanto, all'avvio, un motore asincrono deve sviluppare una coppia maggiore. Per motore asincrono con rotore di fase la coppia iniziale di spunto, corrispondente allo scorrimento sp = 1, dipende dalle resistenze attive delle resistenze regolabili introdotte nel circuito del rotore.
Riso. 1. Avviamento di un motore asincrono trifase con un rotore di fase: a - grafici della dipendenza della coppia del motore con un rotore di fase sullo scorrimento a varie resistenze attive dei resistori nel circuito del rotore, b - diagramma dell'inclusione di resistori e contatti di chiusura dell'accelerazione nel circuito del rotore. Quindi, con contatti di accelerazione chiusi U1, U2, cioè quando si avvia un motore asincrono con anelli di contatto in corto, la coppia di spunto iniziale Mp1 = (0,5 -1,0) Mnom e la corrente di spunto iniziale Ip = (4,5 - 7) Inom e altro. Una piccola coppia iniziale di avviamento di un motore asincrono con rotore di fase potrebbe non essere sufficiente per azionare l'unità di produzione e quindi accelerarla, e una corrente di avviamento significativa provocherà un aumento del riscaldamento degli avvolgimenti del motore, che limita la frequenza della sua accensione, e nelle reti a bassa potenza porta al funzionamento indesiderato di altri ricevitori una caduta di tensione temporanea. Queste circostanze possono essere la ragione che esclude l'uso di motori asincroni con un rotore di fase con una grande corrente di avviamento per azionare meccanismi di lavoro. L'introduzione di resistori regolabili, detti resistori di avviamento, nel circuito del rotore del motore non solo riduce la corrente di avviamento iniziale, ma allo stesso tempo aumenta la coppia di avviamento iniziale, che può raggiungere la coppia massima Mmax (Fig. 1, a, curva 3 ), se lo scorrimento critico del motore con un rotore di fase scr \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, dove Rd" è la resistenza attiva del resistore situato nella fase del avvolgimento del rotore del motore, ridotto alla fase dell'avvolgimento dello statore. Un ulteriore aumento della resistenza attiva del resistore di avviamento non è pratico, poiché porta ad un indebolimento della coppia iniziale di avviamento e all'uscita del punto di coppia massima nella regione di scorrimento s > 1, che esclude la possibilità di accelerazione del rotore. La resistenza attiva richiesta dei resistori per avviare un motore con un rotore di fase è determinata in base ai requisiti dell'avvio, che può essere facile quando Mp = (0,1 - 0,4) Mnom, normale se Mp - (0,5 - 0,75) Mnom, e pesante a Mp ≥ Mnom. Per mantenere una coppia sufficientemente elevata da parte del motore con rotore di fase durante l'accelerazione dell'unità di produzione in modo da ridurre la durata del processo transitorio e ridurre il riscaldamento del motore, è necessario ridurre gradualmente la resistenza attiva di le resistenze di avviamento. La variazione di coppia ammissibile durante l'accelerazione M(t) è determinata dalle condizioni elettriche e meccaniche che limitano il limite di coppia di picco M > 0,85 Mmax, il momento di commutazione M2 > > Ms (Fig. 2), così come l'accelerazione.
Riso. 2. Caratteristiche di avviamento di un motore asincrono trifase con rotore di fase. La commutazione delle resistenze di avviamento è fornita dall'accensione successiva dei contattori di accelerazione Y1, Y2, rispettivamente, nei punti di tempo t1, t2 contati dal momento di avviamento del motore, quando durante l'accelerazione la coppia M diventa uguale al momento di commutazione M2. Per questo motivo, durante l'intero avviamento, tutte le coppie di picco sono le stesse e tutte le coppie di commutazione sono uguali tra loro. Poiché la coppia e la corrente di un motore asincrono con rotore di fase sono correlate, è possibile impostare il limite di corrente di picco I1 \u003d (1,5 - 2,5) Inom e la corrente di commutazione I2 durante l'accelerazione del rotore, che dovrebbe fornire il momento di commutazione M2\u003e Mc. La disconnessione dei motori asincroni con rotore di fase dalla rete di alimentazione avviene sempre con il circuito del rotore in cortocircuito, al fine di evitare sovratensioni nelle fasi dell'avvolgimento statorico, che possono superare di 3-4 volte la tensione nominale di queste fasi , se il circuito del rotore al momento dello spegnimento del motore è aperto.
34 Regolazione della frequenza. Questo metodo di controllo della velocità consente l'utilizzo dei motori asincroni più affidabili ed economici con rotore a gabbia di scoiattolo. Tuttavia, per modificare la frequenza della tensione di alimentazione, è necessaria una sorgente di corrente elettrica a frequenza variabile. Come quest'ultimo, vengono utilizzati sia generatori sincroni a velocità variabile, sia convertitori di frequenza - elettrici o statici, realizzati su valvole a semiconduttore controllate (tiristori). Attualmente, i convertitori di frequenza hanno un circuito piuttosto complesso e un costo relativamente elevato. Tuttavia, il rapido sviluppo della tecnologia dei semiconduttori di potenza fa sperare in un ulteriore miglioramento dei convertitori di frequenza, che apre prospettive per l'uso diffuso della regolazione della frequenza. Una descrizione dettagliata delle leggi di controllo per la regolazione della frequenza e un'analisi del funzionamento di un motore asincrono quando alimentato da un convertitore di frequenza sono fornite in § 4.13 e 4.14. Regolazione modificando il numero di poli. Questa regolazione permette di ottenere un cambio graduale di velocità. Sulla fig. 4.35 mostra il circuito più semplice (per una fase), che consente di modificare due volte il numero di poli dell'avvolgimento dello statore. Per fare ciò, ogni fase dell'avvolgimento dello statore è divisa in due parti, che vengono commutate dal collegamento in serie al parallelo. Si può vedere dalla figura che quando le bobine 1-2 e 3-4 vengono accese in due rami paralleli, il numero di poli viene dimezzato e, di conseguenza, la frequenza di rotazione del campo magnetico viene raddoppiata. Durante la commutazione, il numero di spire collegate in serie in ciascuna fase viene dimezzato, ma poiché la velocità di rotazione raddoppia, l'EMF indotto nella fase rimane invariato. Pertanto, il motore a entrambe le velocità può essere collegato alla rete con la stessa tensione. Per non attivare l'avvolgimento del rotore, viene eseguito quest'ultimo cortocircuitato. Se è necessario avere tre o quattro velocità, sullo statore viene posizionato un altro avvolgimento, commutando il quale è possibile ottenere altre due frequenze. Si chiamano motori a induzione a poli commutabili multivelocità. Regolazione mediante l'inclusione di un reostato nel circuito del rotore. Quando nel circuito del rotore sono incluse resistenze attive aggiuntive R est1 , R est2, R add3 e altri modificano la forma della dipendenza M = f(i) e caratteristiche meccaniche n 2 = f(M) motore (Fig. 4.37, a). Allo stesso tempo, qualche momento di carico M n scontrino della partita S 1 , S 2 , S 3 , ..., più grande degli slip S e , quando il motore gira su una caratteristica naturale (quando R est = 0). Pertanto, il regime del motore in regime stazionario diminuisce da n e prima P 1 P 2 , P 3 ,... (Fig. 4.37, b). Questo metodo di controllo può essere utilizzato solo per i motori ad anelli. Ti consente di modificare senza problemi la velocità su un'ampia gamma. I suoi svantaggi sono: a) grandi perdite di energia nel reostato di controllo; b) caratteristiche meccaniche eccessivamente "morbide" del motore con elevata resistenza nel circuito del rotore. In alcuni casi, quest'ultimo è inaccettabile, poiché una piccola variazione della coppia di carico corrisponde a una variazione significativa della velocità.
35 Generatore asincrono- si tratta di una macchina elettrica asincrona (motore el.) funzionante in modalità generatore. Con l'aiuto di un motore di azionamento (nel nostro caso, una turbina eolica), il rotore di un generatore elettrico asincrono ruota nella stessa direzione del campo magnetico. In questo caso, lo scorrimento del rotore diventa negativo, una coppia frenante appare sull'albero della macchina asincrona e il generatore trasferisce energia alla rete. Per eccitare la forza elettromotrice nel suo circuito di uscita, viene utilizzata la magnetizzazione residua del rotore. Per questo vengono utilizzati condensatori. I generatori asincroni non sono soggetti a cortocircuiti. Un generatore asincrono è più semplice di uno sincrono (ad esempio un generatore per auto): se quest'ultimo ha degli induttori posti sul rotore, allora il rotore del generatore asincrono si presenta come un volano convenzionale. Un tale generatore è meglio protetto da sporco e umidità, più resistente a cortocircuiti e sovraccarichi e la tensione di uscita di un generatore asincrono ha un grado inferiore di distorsione non lineare. Ciò consente di utilizzare generatori asincroni non solo per alimentare dispositivi industriali non critici per la forma della tensione di ingresso, ma anche per collegare apparecchiature elettroniche. È un generatore elettrico asincrono che è una fonte di corrente ideale per dispositivi con un carico attivo (ohmico): riscaldatori elettrici, convertitori di saldatura, lampade a incandescenza, dispositivi elettronici, ingegneria informatica e radio. Vantaggi di un generatore asincrono . Questi vantaggi includono un basso fattore di chiaro (coefficiente armonico), che caratterizza la presenza quantitativa di armoniche più elevate nella tensione di uscita del generatore. Armoniche più elevate causano una rotazione irregolare e un riscaldamento inutile dei motori elettrici. I generatori sincroni possono avere un fattore di compensazione fino al 15% e il fattore di compensazione di un generatore asincrono non supera il 2%. Pertanto, un generatore elettrico asincrono produce praticamente solo energia utile. Un altro vantaggio di un generatore asincrono è che manca completamente di avvolgimenti rotanti e parti elettroniche sensibili alle influenze esterne e abbastanza spesso soggette a danni. Pertanto, il generatore asincrono non è soggetto ad usura e può funzionare per molto tempo. All'uscita dei nostri generatori c'è subito la 220/380V AC, che può essere utilizzata direttamente per gli elettrodomestici (es. stufe), per caricare le batterie, per collegarsi ad una segheria, e anche per il funzionamento in parallelo con una rete tradizionale. In questo caso pagherai la differenza consumata dalla rete e generata dal mulino a vento. Perché Poiché la tensione arriva immediatamente ai parametri industriali, non avrai bisogno di vari convertitori (inverter) quando il generatore eolico è direttamente collegato al tuo carico. Ad esempio puoi collegarti direttamente ad una segheria e, in presenza di vento, lavorare come se fossi semplicemente connesso ad una rete 380V. Come sapete, per ridurre i tempi di frenata durante l'arresto di macchine e meccanismi di produzione, vengono spesso utilizzati freni meccanici. La riduzione del tempo di frenatura, soprattutto nel caso di un ciclo di lavoro breve, porta ad un notevole aumento della produttività di macchine e meccanismi. Gli svantaggi dei freni meccanici sono la rapida usura delle superfici di sfregamento, la complessità e la necessità di una regolazione periodica della forza frenante, la necessità di spazio aggiuntivo per posizionare il freno e il suo collegamento al meccanismo. Tutti gli inconvenienti di cui sopra vengono eliminati se, per gli scopi indicati, al posto del freno meccanico, si utilizzano le proprietà dei motori elettrici per lavorare in modalità frenante, cioè per funzionare essenzialmente come generatore e sviluppare non una coppia, ma un coppia frenante. In molte macchine di sollevamento e trasporto (gru, ascensori, scale mobili, ecc.), dove è possibile il movimento per gravità, è assicurata una velocità costante e costante di abbassamento dei carichi utilizzando la coppia frenante del motore elettrico. I motori a corrente continua possono funzionare in tre modalità di frenatura:
In modalità opposizione;
In modalità generatore con uscita di energia in rete;
In modalità di frenata dinamica.
In una qualsiasi delle modalità di frenatura, il motore elettrico funziona come un generatore, converte, ad esempio, l'energia cinetica delle parti mobili o l'energia potenziale di un carico discendente in energia elettrica.
36 Quando il motore viene invertito in marcia spostando l'interruttore, si verifica prima la frenata da una data velocità a zero, quindi l'accelerazione nell'altra direzione. Tale frenatura può essere utilizzata anche per frenare durante il cosiddetto opposizione. Durante questa inversione o frenata, un motore a induzione a gabbia di scoiattolo ha correnti significative. Pertanto, in base alle condizioni di riscaldamento di questi motori, il numero di inversioni all'ora non supera le decine. Per limitare le correnti e aumentare le coppie, viene introdotta una resistenza nel circuito del rotore di fase di un motore asincrono. Consideriamo tre modi principali di frenatura elettrica dei motori asincroni. Frenare per opposizione, come indicato, viene eseguita a motore acceso in movimento. In questo caso, il campo magnetico ruota nella direzione opposta rispetto al senso di rotazione del motore e la coppia del motore sta frenando - agisce contro il senso di rotazione. Frenatura del generatore avviene quando si cambia un motore multivelocità in movimento da una velocità superiore a una inferiore, ad es. quando si cambia la macchina da un numero di poli inferiore a uno maggiore. Al primo momento della commutazione, la velocità del motore risulta essere molto maggiore della velocità del suo campo, ovvero lo scorrimento risulta negativo e la macchina passa alla modalità generatore. La frenatura avviene con la conversione dell'energia cinetica delle parti rotanti in energia elettrica, che, detratte le perdite nella macchina, viene ceduta alla rete. Il freno del generatore può anche essere nel sollevatore quando si abbassa un carico pesante, accelerando il motore a una velocità superiore a quella sincrona; quindi la macchina inizia a dare alla rete l'energia che le viene impartita dal carico discendente. La frenatura del generatore è possibile solo a velocità sovrasincrona. Se è necessario arrestare il motore al termine della frenata, quindi entro la fine della frenata si deve passare alla frenatura meccanica o ad un altro tipo di frenatura elettrica (dinamica, a controcommutazione). Il fissaggio della posizione alla fine, se necessario, viene effettuato solo con l'ausilio di un freno meccanico. In frenata dinamica l'avvolgimento dello statore del motore è scollegato dalla rete trifase e collegato alla rete CC o CA monofase. In questo caso sono possibili vari modi per collegare le fasi dell'avvolgimento dello statore. L'avvolgimento dello statore, alimentato da corrente continua, crea un campo magnetico stazionario. Proprio come durante il normale funzionamento del motore, il suo campo rotante trascina con sé il rotore, un campo stazionario durante la frenata dinamica provoca l'arresto rapido del rotore. L'energia cinetica delle parti rotanti viene convertita in calore rilasciato nel circuito del rotore a causa delle correnti indotte in esso dal campo fisso dello statore. La fluidità della frenatura è garantita dalla regolazione della tensione ai terminali dello statore.La coppia frenante del motore con rotore di fase può essere regolata anche da un reostato nel circuito del rotore. Lo svantaggio della frenatura dinamica è la necessità di una sorgente CC a bassa tensione.
37 Macchina sincrona- questa è una macchina elettrica a corrente alternata, la cui velocità del rotore è uguale alla frequenza di rotazione del campo magnetico nel traferro. Le parti principali di una macchina sincrona sono l'armatura e l'induttore. Il design più comune è quello in cui l'indotto si trova sullo statore e c'è un induttore sul rotore separato da esso da un traferro. Un'armatura è uno o più avvolgimenti CA. Nei motori, le correnti fornite all'indotto creano un campo magnetico rotante che si accoppia con il campo dell'induttore e quindi l'energia viene convertita. Il campo di armatura interessa il campo dell'induttore ed è quindi anche chiamato campo di reazione dell'ancora. Nei generatori, il campo di reazione dell'indotto è creato dalle correnti alternate indotte nell'avvolgimento dell'indotto dall'induttore. L'induttore è costituito da poli: elettromagneti CC o magneti permanenti (nelle micromacchine). Gli induttori per macchine sincrone sono disponibili in due diversi modelli: polo saliente o polo non saliente. Una macchina a poli salienti si distingue per il fatto che i poli sono pronunciati e hanno un design simile ai poli di una macchina a corrente continua. Con un design a polo implicito, l'avvolgimento di eccitazione si inserisce nelle fessure del nucleo dell'induttore, molto simile all'avvolgimento dei rotori di macchine asincrone con rotore di fase, con l'unica differenza che tra i poli viene lasciato uno spazio che non è pieno di conduttori (il cosiddetto grande dente). I design dei poli non salienti vengono utilizzati nelle macchine ad alta velocità per ridurre il carico meccanico sui poli. Per ridurre la resistenza magnetica, cioè per migliorare il passaggio del flusso magnetico, vengono utilizzati nuclei ferromagnetici del rotore e dello statore. Fondamentalmente, sono una struttura in acciaio elettrico laminato (cioè assemblato da fogli separati). L'acciaio elettrico ha una serie di proprietà interessanti. In particolare ha un alto contenuto di silicio per aumentarne la resistenza elettrica e quindi ridurre le correnti parassite.
Ti consigliamo di leggere
, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito
Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito Mele al forno con ricotta Mele al forno con ricotta
Mele al forno con ricotta Mele al forno con ricotta

