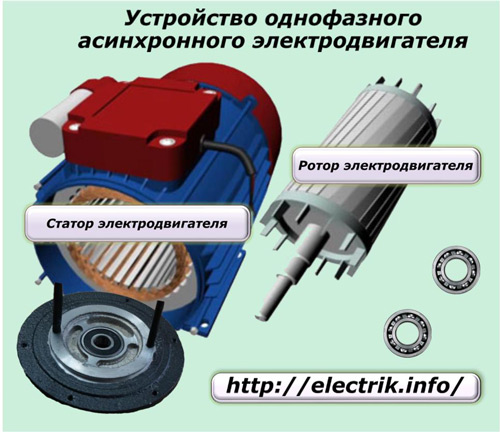
L'impressionante potenza di un motore elettrico asincrono, che trasforma l'elettricità in energia rotazionale, non è creata da alcun componente meccanico: per una rotazione così potente, nel suo "ripieno" vengono utilizzati solo elettromagneti.
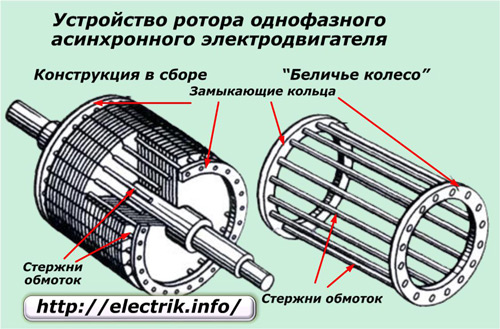
Rotore del motore a induzione: design
rotore: un elemento di un motore elettrico che ruota all'interno dello statore (componente fisso), il cui albero è collegato alle parti delle unità di lavoro, ad esempio seghe, turbine e pompe. L'anima laminata è costituita da singole lastre di acciaio elettrico con fessure semichiuse o aperte.
Il motore è un dispositivo elettromeccanico che converte l'energia elettrica in energia meccanica. e un motore trifase che funziona a velocità sincrona è chiamato motore sincrono. Quando due poli opposti si avvicinano, se i magneti sono forti, c'è un'enorme forza di attrazione tra i due poli. In questo stato, due magneti sono chiamati magnetici.
Principio di rotazione sincrona
Come ruota il rotore a velocità sincrona? Ora, per comprendere il concetto di funzionamento del motore sincrono, si consideri un rotore semplice a due poli. Il motore sincrono è una macchina a doppia eccitazione con due ingressi elettrici collegati. Pertanto, un motore sincrono ruota ad una ed una sola velocità, cioè velocità sincrona. Ma tutto questo dipende dalla presenza del bloccaggio magnetico tra i poli dello statore e del rotore. È praticamente impossibile per i poli dello statore tirare i poli del rotore dalla loro posizione stazionaria in uno stato bloccato magneticamente. questo è il motivo per cui i motori sincroni non si avviano da soli.
Il massiccio rotore è un solido cilindro in acciaio posizionato all'interno dello statore, con un'anima premuta sulla sua superficie.
Senza contatto, non collegato a nessun esterno circuito elettrico l'avvolgimento del rotore crea coppia ed è di due tipi:
- in cortocircuito (rotore in cortocircuito);
- fase (rotore di fase).
rotore a gabbia di scoiattolo
Aste di rame altamente conduttive (per macchine ad alta potenza) o alluminio (per macchine di potenza inferiore) saldate o versate sulla superficie del nucleo e cortocircuitate dalle estremità con due anelli svolgono il ruolo di elettromagneti con i poli rivolti verso lo statore. Questo disegno è chiamato "gabbia di scoiattolo", datogli dall'ingegnere elettrico russo M. O. Dolivo-Dobrovolsky.
Metodi per avviare un motore sincrono. Dopo un po', quando si verifica il blocco magnetico, l'alimentazione al motore esterno viene interrotta dalla frizione. Applicazione dei motori sincroni. Viene utilizzato dove è richiesta una potenza elevata a velocità costante.
Poiché il motore sincrono è capace di fattori di potenza sia in anticipo che in ritardo, può essere utilizzato per migliorare il fattore di potenza. Un motore sincrono scarico con un fattore di potenza principale è collegato in un sistema di alimentazione in cui non è possibile utilizzare condensatori statici.
Le aste degli avvolgimenti non hanno alcun isolamento, poiché la tensione in un tale avvolgimento è zero. Più comunemente usato per aste di motori di media potenza, l'alluminio facile da fondere è caratterizzato da bassa densità e alta conducibilità elettrica. Per ridurre le armoniche superiori della forza elettromotrice (EMF) ed eliminare l'ondulazione campo magnetico, le aste del rotore hanno un certo angolo di inclinazione calcolato rispetto all'asse di rotazione.
Design del motore a induzione del rotore rotante
Il motore sincrono trova applicazione dove la velocità di funzionamento è inferiore ed è richiesta una potenza elevata. Nel mio ultimo articolo, abbiamo discusso di quale tipo. Questo motore è quello che utilizza il rotore avvolto. Il motore asincrono a rotore rotante è anche noto come motore asincrono scontrino. Come con altri motori a induzione, le parti principali sono lo statore e il rotore. Lo statore di questo motore è lo stesso dei motori a induzione con rotore a gabbia di scoiattolo. Il rotore è la parte che lo differenzia dagli altri motori a induzione.
Nei motori a bassa potenza, le scanalature del nucleo, di regola, sono chiuse: separando il rotore dal traferro: una piastra d'acciaio consente di fissare ulteriormente gli avvolgimenti, ma a scapito di un certo aumento della loro resistenza induttiva.
rotore di fase
È caratterizzato praticamente non diversamente dall'avvolgimento dello statore trifase (in più caso generale- avvolgimento multifase) posato nelle scanalature del nucleo, le cui estremità sono collegate secondo lo schema a "stella". I conduttori degli avvolgimenti sono collegati ad anelli di contatto fissati sull'albero del rotore, ai quali, all'avviamento del motore, vengono premute e scorrono spazzole fisse di grafite o metallo-grafite collegate al reostato.
Statore del motore a induzione del rotatore avvolto
Lascia che ti dia una breve introduzione allo statore e poi ti parli della struttura del rotore.
Rotore del motore a induzione del rotatore avvolto
In un motore a induzione a rotore rotante, il rotore ha avvolgimento trifase simile all'avvolgimento dello statore. L'avvolgimento è posizionato uniformemente sulle scanalature del rotore. collegato con 3 collettori rotanti. Riguarda la costruzione del rotore. Ora discutiamo di come funziona.Funzionamento di un motore a induzione con rotore avvolto
Il campo magnetico dello statore e il campo magnetico del rotore interagiscono e danno luogo a una coppia che farà girare il rotore.- Anche il rotore è cilindrico e presenta fori di avvolgimento.
- Questi collettori rotanti sono montati sull'albero.
- Ogni fase è collegata a uno dei tre collettori rotanti.
- Questi anelli collettori sono collegati alle spazzole.
- I tre collettori rotanti ruotano con il rotore mentre le lancette rimangono ferme.
- Questo campo magnetico è chiamato campo magnetico del rotore.
Per limitare le correnti parassite risultanti, è generalmente sufficiente un film di ossido applicato sulla superficie degli avvolgimenti, al posto delle vernici isolanti.
Un resistore di avviamento o regolazione trifase aggiunto al circuito dell'avvolgimento del rotore consente di modificare la resistenza attiva del circuito del rotore, contribuendo a ridurre le elevate correnti di avviamento. I reostati possono essere utilizzati:
La velocità e la coppia possono essere controllate in questi motori modificando la resistenza. Alcune delle caratteristiche dei motori a induzione a rotore rotante sono presentate di seguito. Il motore a induzione del rotore avvolto richiede una manutenzione aggiuntiva a causa dello slittamento e delle spazzole. Questo motore consuma meno corrente all'avvio rispetto ai motori a induzione a gabbia di scoiattolo. Il motore a induzione a rotore rotante è meno efficiente dei motori a induzione a gabbia di scoiattolo.
- Puoi controllare la velocità di questi motori.
- Il momento può anche essere controllato.
- Questi motori hanno un'elevata coppia di spunto.
- Tali motori sono più costosi di altri motori a induzione.
- Vengono presi in considerazione anche i costi di manutenzione.
- Questi motori hanno un basso fattore di potenza.
- filo metallico o a gradini - con passaggio manuale o automatico da un livello di resistenza all'altro;
- liquido, la cui resistenza è regolata dalla profondità di immersione nell'elettrolita degli elettrodi.
Per aumentare la durata delle spazzole, alcuni modelli di rotori di fase sono dotati di uno speciale meccanismo a gabbia di scoiattolo che solleva le spazzole dopo aver avviato il motore e chiude gli anelli.
E dove i motori a induzione a gabbia di scoiattolo non possono essere utilizzati a causa delle loro elevate correnti di spunto. Il motore a induzione con rotore avvolto viene utilizzato in applicazioni che richiedono avviamento graduale e velocità variabile. Alcune delle applicazioni di questo motore includono gru, mulini, argani e nastri trasportatori. Il motore a induzione a rotore rotante viene utilizzato anche in ventilatori, soffianti e miscelatori. Sono utilizzati nelle grandi pompe nell'industria dell'acqua.
- Sono utilizzati in luoghi in cui è richiesta un'elevata coppia di spunto.
- Questi motori sono utilizzati con carichi inerziali elevati.
I motori asincroni con rotore di fase sono caratterizzati da un design più complesso rispetto a una gabbia di scoiattolo, ma allo stesso tempo da caratteristiche di avviamento e controllo più ottimali.
Principio di funzionamento
Gli elettromagneti dello statore si trovano vicino alle barre del rotore e trasmettono loro elettricità per ruotarlo. Il campo magnetico indotto nel rotore seguirà il campo magnetico dello statore, effettuando così la rotazione meccanica dell'albero del rotore e delle unità associate. Allo stesso tempo, l'induzione elettromagnetica creata dalle bobine dello statore spinge la corrente sulle aste rigorosamente lontano da se stessa. Il valore della corrente nelle aste cambia nel tempo.
Sono utilizzati in una varietà di applicazioni industriali ma possono essere protetti da vari rischi come guasti elettrici meccanici per aiutare i loro scopi. Questo articolo illustra il sistema per la protezione dei motori asincroni dai guasti che si verificano. Questo motore sta sperimentando tipi diversi guasti elettrici quali sovratensione, sottotensione, sovraccarico, tensione sbilanciata, guasto a terra di fase e monofase. Questi guasti elettrici provocano il riscaldamento degli avvolgimenti del motore, con conseguente riduzione della vita del motore.
Scrivi commenti, aggiunte all'articolo, forse mi sono perso qualcosa. Dai un'occhiata, sarò felice se troverai qualcos'altro di utile sul mio sito. Ti auguro il meglio.
Il nome stesso di questo dispositivo elettrico lo indica Energia elettrica, che arriva ad esso, viene convertito in moto rotatorio rotore. Inoltre, l'aggettivo "asincrono" caratterizza la discrepanza, il ritardo delle velocità di rotazione dell'indotto rispetto al campo magnetico dello statore.
Il grado di un motore a induzione dipende dai costi e dalle caratteristiche del motore. Il sistema direzionale è progettato per proteggere il motore asincrono dal surriscaldamento e dalla monofase. Il sistema di protezione che utilizza più motori per la produzione è molto importante nelle industrie.
Il piano di progettazione principale per questo progetto è garantire la sicurezza nelle industrie. Se la temperatura del motore durante il processo supera il valore di soglia, il motore si arresta immediatamente. Il sistema utilizza un'alimentazione trifase a cui sono collegati trasformatori trifase. Se una qualsiasi delle fasi non è disponibile, il trasformatore equivalente termina, fornendo alimentazione al circuito.
La parola "monofase" provoca una definizione ambigua. Ciò è dovuto al fatto che in elettrica determina diversi fenomeni:
shift, differenza angolare tra grandezze vettoriali;
potenziale conduttore a due, tre o quattro fili circuito elettrico corrente alternata;
uno degli avvolgimenti dello statore o del rotore motore trifase o un generatore.
Il relè principale è alimentato tramite una serie di 4 relè, che sono scollegati dal fatto che un relè non è controllato dall'alimentazione. Pertanto, il relè principale fornisce alimentazione trifase al motore, che è spento. Il termistore è collegato al corpo del motore a induzione per rilevare la temperatura. Se la temperatura aumenta, il 4° relè è diseccitato.
Inoltre, questo progetto può essere sviluppato utilizzando sensori di corrente per la protezione da sovraccarico e un sensore di sequenza di fase per proteggere il motore da una sequenza di fase errata. Tutto ciò, quindi, riguarda il sistema di protezione dei motori asincroni. Ci auguriamo che tu capisca meglio questo concetto.
Pertanto, lo chiariamo immediatamente motore elettrico monofaseè consuetudine chiamare quello da cui lavora rete a due fili corrente alternata, rappresentata da fase e potenziale zero. Il numero di avvolgimenti montati in vari modelli di statore non influisce su questa determinazione.
Progettazione del motore
Secondo il suo dispositivo tecnico, un motore asincrono è composto da:
L'uso di un avvolgimento sfasatore in uno statore
Le sue principali caratteristiche sono: Affidabilità Basso costo di acquisto e manutenzione Possibilità di controllo della velocità. Pompe e compressori Ventilatori Fresatrici Tapis roulant, nastri trasportatori e elevatori Rettificatrici e smerigliatrici Seghe, torni e smerigliatrici.
Il funzionamento di tutti i motori elettrici, compreso il motore asincrono trifase, si basa sul campo magnetico creato dalla corrente elettrica che circola negli avvolgimenti della macchina. Per quanto riguarda il motore a induzione trifase, ha tre avvolgimenti in una struttura chiamata statore.
1. statore - una parte statica fissa, costituita da un corpo con vari elementi elettrici posizionati su di esso;
2. un rotore ruotato dalle forze del campo elettromagnetico dello statore.
Il collegamento meccanico di queste due parti è costituito da cuscinetti di rotazione, i cui anelli interni sono alloggiati sulle prese montate dell'albero del rotore, e gli anelli esterni sono montati in coperchi laterali protettivi fissati sullo statore.
Il campo magnetico risultante generato da ciascuna corrente elettrica è di natura rotante ea velocità costante. Come possiamo trovare il campo risultante? Quando una bobina è azionata da una corrente elettrica, si crea un campo magnetico lungo l'asse della bobina e ha un valore proporzionale alla corrente.
L'avvolgimento trifase è costituito da tre distanziatori monofase da 120 ohm. Questi campi si trovano a una distanza di 120 gradi l'uno dall'altro. Questo campo magnetico attrae una struttura in movimento chiamata rotore, facendola ruotare. La velocità sincrona del campo rotante è data come segue.
Rotore
Il suo dispositivo per questi modelli è lo stesso di tutti i motori asincroni: un circuito magnetico è montato su un albero in acciaio costituito da piastre laminate a base di leghe di ferro dolce. Sulla sua superficie esterna sono realizzate scanalature in cui sono montate aste di avvolgimento in alluminio o rame, cortocircuitate alle estremità degli anelli di chiusura.
I valori dei poli più comuni sono 2, 4, 6 o 8 poli. La parte mobile, chiamata rotore, responsabile della trasmissione movimento meccanico ad un carico come un ascensore. Ovviamente tutti i dispositivi che mi interessano sono dotati di motore asincrono.
Principio e funzionamento di un motore a induzione
Quali sono i vantaggi di questo tipo di motore? Ecco alcune risposte. Il motore a induzione è un motore ad alte prestazioni spesso utilizzato nei settori dei trasporti, dell'industria e elettrodomestici. Costituito da due parti separate denominate rotore e statore, il motore a induzione deve il suo nome alla differenza di potenza misurata su ciascuna di queste parti. Infatti, sebbene lo statore ruoti ad una certa velocità determinata dalla corrente elettrica, il rotore, nel frattempo, genera un proprio campo magnetico ed ha una propria velocità di rotazione, che non è proporzionale alla velocità dello statore.
scorre nell'avvolgimento del rotore elettricità, indotto dal campo magnetico dello statore, e il circuito magnetico serve a buon passaggio il flusso magnetico creato qui.
I modelli di rotore separati per motori monofase possono essere realizzati con materiali non magnetici o ferromagnetici a forma di cilindro.
Motore asincrono e robot da cucina
Questa differenza, chiamata sfasamento, è in genere compresa tra il 2 e il 10%. Il motore a induzione trova largo impiego nel mondo degli elettrodomestici, principalmente per lavatrici, lavastoviglie e asciugatrici. Questo tipo di motore è molto robusto e garantisce un funzionamento relativamente silenzioso. Nel caso dei robot domestici, avere un motore a induzione ha un importante vantaggio: poiché le due parti del motore ruotano a velocità diversa, le lame del robot possono adattare la loro velocità al contenuto della ciotola stessa quando il dispositivo è a pieno regime potenza.
statore
Viene anche presentato il design dello statore:
corpo;
circuito magnetico;
avvolgimento.
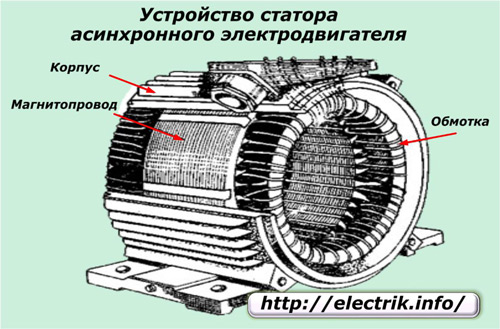
Il suo scopo principale è generare un campo elettromagnetico stazionario o rotante.
L'avvolgimento dello statore è solitamente costituito da due circuiti:
In altre parole, più densa è la cottura, più lentamente gira il robot, anche se è impostato su massima potenza. Il motore asincrono offre inoltre la possibilità di adattare la velocità del dispositivo alla quantità di prodotti presenti nel contenitore. In breve: i robot che hanno un motore asincrono sono robot intelligenti. Un altro vantaggio significativo: il motore asincrono dei robot domestici rende questi dispositivi più silenziosi. Criterio di selezione per cucinare la domenica mattina senza svegliare tutta la casa!
1. lavoratore;
2. lanciatore.
Per i modelli più semplici, progettati per lo svolgimento manuale dell'armatura, è possibile eseguire un solo avvolgimento.
Il principio di funzionamento di un motore elettrico asincrono monofase
Per semplificare la presentazione del materiale, immaginiamo che l'avvolgimento dello statore sia realizzato con un solo giro dell'anello. I suoi fili all'interno dello statore sono portati in un cerchio di 180 gradi angolari. Lo attraversa una corrente sinusoidale alternata, avente semionde positive e negative. Non crea un campo magnetico rotante, ma pulsante.
Come si verificano le pulsazioni del campo magnetico
Analizziamo questo processo usando l'esempio del flusso di una semionda di corrente positiva ai tempi t1, t2, t3.
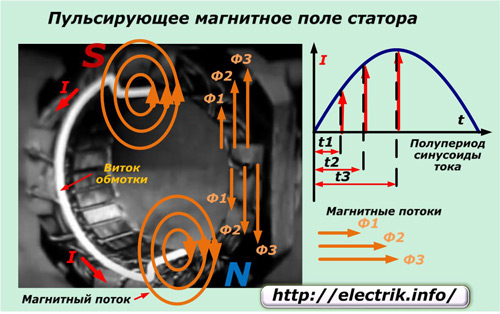
Corre lungo la parte superiore del conduttore verso di noi, e lungo la parte inferiore allontanandosi da noi. Nel piano perpendicolare rappresentato dal circuito magnetico, i flussi magnetici F sorgono attorno al conduttore.
Le correnti che cambiano in ampiezza negli istanti di tempo considerati creano campi elettromagnetici di diversa intensità F1, F2, F3. Poiché la corrente nella metà superiore e inferiore è la stessa, ma la bobina è piegata, i flussi magnetici di ciascuna parte sono diretti in modo opposto e si annullano a vicenda. Puoi determinarlo con la regola del succhiello o con la mano destra.
Come puoi vedere, con una semionda di rotazione positiva, il campo magnetico non viene osservato, ma solo la sua pulsazione avviene nella parte superiore e inferiore del filo, che è anche reciprocamente bilanciato nel circuito magnetico. Lo stesso processo si verifica nella sezione negativa della sinusoide, quando le correnti cambiano direzione nell'opposto.
Poiché non c'è campo magnetico rotante, il rotore rimarrà fermo, perché non ci sono forze applicate ad esso per iniziare a ruotare.
Come si crea la rotazione del rotore in un campo pulsante
Se ora diamo la rotazione del rotore, anche se a mano, continuerà questo movimento.
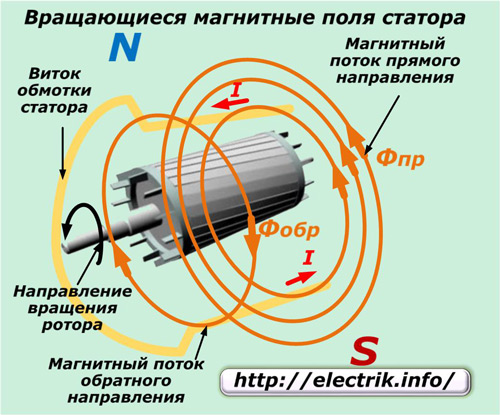
Per spiegare questo fenomeno, mostriamo che il flusso magnetico totale cambia di frequenza della sinusoide corrente da zero ad un valore massimo in ogni semiciclo (con un cambio di direzione al contrario) ed è costituito da due parti formate nella parte superiore e rami inferiori, come mostrato in figura.
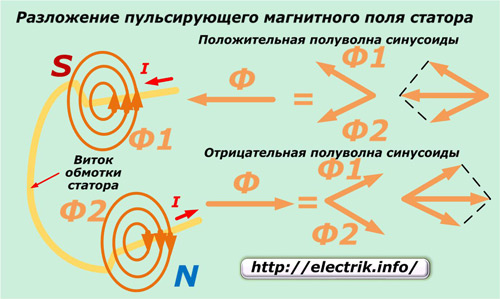
Il campo magnetico pulsante dello statore è costituito da due campi circolari di ampiezza Фmax/2 e che si muovono in direzioni opposte con la stessa frequenza.
npr=nrev=f60/p=1.
Questa formula indica:
npr e nrev della frequenza di rotazione del campo magnetico dello statore nelle direzioni avanti e indietro;
n1 è la velocità del flusso magnetico rotante (rpm);
p è il numero di coppie di poli;
f è la frequenza della corrente nell'avvolgimento dello statore.
Ora daremo al motore la rotazione a mano in una direzione, che rileverà immediatamente il movimento dovuto al verificarsi di un momento rotante causato dallo scorrimento del rotore rispetto a diversi flussi magnetici delle direzioni avanti e indietro.
Assumiamo che il flusso magnetico della direzione in avanti coincida con la rotazione del rotore e che l'inverso, rispettivamente, sia opposto. Se indichiamo con n2 la frequenza di rotazione dell'armatura in rpm, allora possiamo scrivere l'espressione n2< n1.
In questo caso, denotiamo Spr \u003d (n1-n2) / n1 \u003d S.
Qui, gli indici S e Spr sono gli slittamenti del motore a induzione e del rotore del relativo flusso magnetico della direzione in avanti.
Per il flusso inverso, lo Srev scorrevole è espresso con una formula simile, ma con un cambio di segno n2.
Srev \u003d (n1 - (-n2)) / n1 \u003d 2-Spr.
Secondo la legge dell'induzione elettromagnetica, sotto l'azione di flussi magnetici diretti e inversi nell'avvolgimento del rotore, forza elettromotiva, che creerà in esso correnti delle stesse direzioni I2pr e I2arr.

La loro frequenza (in hertz) sarà direttamente proporzionale alla quantità di slip.
f2pr=f1∙Spr;
f2rev=f1∙Srev.
Inoltre la frequenza f2rev, formata dalla corrente indotta I2rev, supera significativamente la frequenza f2rev.
Ad esempio, il motore elettrico funziona su una rete a 50 Hz con n1=1500 e n2=1440 giri/min. Il suo rotore ha uno scorrimento relativo al flusso magnetico in direzione avanti Spr=0,04 e alla frequenza della corrente f2pr=2 Hz. Scorrimento inverso Srev=1,96 e frequenza corrente f2rev=98 Hz.
In base alla legge di Ampère, quando la corrente I2pr interagisce con il campo magnetico Фpr, apparirà una coppia Mpr.
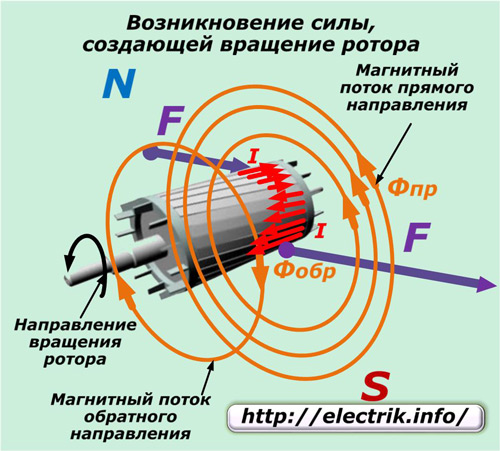
Mpr \u003d cm ∙ Fpr ∙ I2pr ∙cosφ2pr.
Qui, il valore del coefficiente costante cM dipende dalla progettazione del motore.
In questo caso agisce anche il flusso magnetico inverso Mobr, che viene calcolato dall'espressione:
Mobr \u003d cm ∙ Fabr ∙ I2 arr ∙ cosφ2 arr.
Come risultato dell'interazione di questi due flussi, apparirà quello risultante:
M= Mpr-Mobr.
Attenzione! Quando il rotore ruota, in esso vengono indotte correnti di diverse frequenze, che creano momenti di forze con direzioni diverse. Pertanto, l'armatura del motore ruoterà sotto l'azione di un campo magnetico pulsante nella direzione da cui ha iniziato la rotazione.
Durante il superamento del carico nominale da parte di un motore monofase, si crea un piccolo scorrimento con la quota principale della coppia diretta Mpr. La contrazione del campo magnetico frenante inverso Mobr incide molto poco a causa della differenza nelle frequenze delle correnti di andata e ritorno.
f2reverse corrente supera significativamente f2reverse, e la generata reattanza induttiva X2obr supera di gran lunga il componente attivo e fornisce un grande effetto smagnetizzante del flusso magnetico inverso Fobre, che alla fine diminuisce.
Poiché il fattore di potenza del motore sotto carico è piccolo, il flusso magnetico inverso non può avere un forte effetto sul rotore rotante.
Quando una fase della rete viene alimentata a un motore con un rotore fisso (n2=0), lo scorrimento sia in avanti che all'indietro sono uguali a uno, i campi magnetici e le forze dei flussi avanti e indietro sono bilanciati e non si verifica alcuna rotazione . Pertanto, è impossibile svolgere l'indotto del motore elettrico dall'alimentazione di una fase.
Come determinare rapidamente il regime del motore:
Come viene creata la rotazione del rotore in un motore asincrono monofase
Nell'intera storia di funzionamento di tali dispositivi, sono state sviluppate le seguenti soluzioni progettuali:
1. filatura manuale dell'asta a mano oa corda;
2. l'utilizzo di un avvolgimento aggiuntivo collegato al momento del lancio per resistenza ohmica, capacitiva o induttiva;
3. separazione da una bobina magnetica in cortocircuito del circuito magnetico dello statore.
Il primo metodo è stato utilizzato nello sviluppo iniziale e non è stato ulteriormente utilizzato a causa dei possibili rischi di lesioni durante il lancio, sebbene non richieda il collegamento di catene aggiuntive.
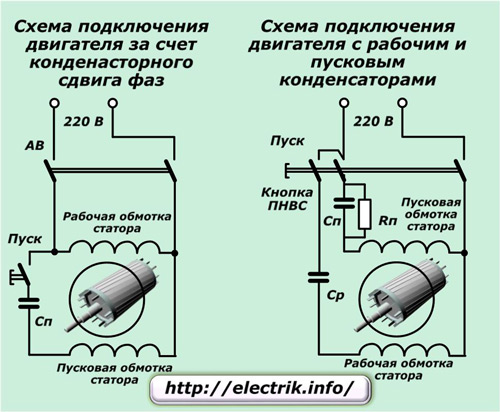
L'uso di un avvolgimento sfasatore in uno statore
Per dare la rotazione iniziale del rotore all'avvolgimento dello statore, inoltre, al momento del lancio, ne è collegato un altro ausiliario, ma spostato di angolo solo di 90 gradi. Si esegue con un filo più spesso per far passare correnti maggiori di quelle che scorrono in quello di lavoro.
Lo schema di collegamento di un tale motore è mostrato nella figura a destra.

Qui viene utilizzato un pulsante del tipo PNVS, appositamente progettato per tali motori ed ampiamente utilizzato nel funzionamento delle lavatrici prodotte in URSS. Questo pulsante accende immediatamente 3 contatti in modo tale che, dopo aver premuto e rilasciato, i due contatti estremi rimangano fissi nello stato acceso, e quello centrale si chiuda per un breve tempo, per poi tornare nella posizione originale sotto l'azione di la primavera.
I contatti estremi chiusi possono essere disattivati premendo il pulsante "Stop" adiacente.

Oltre all'interruttore a pulsante, per disabilitare l'avvolgimento aggiuntivo in modalità automatica, vengono utilizzati:
1. interruttori centrifughi;
2. relè differenziali o di corrente;
Per migliorare l'avviamento del motore sotto carico, elementi aggiuntivi in un avvolgimento sfasato.
In un tale circuito, una resistenza ohmica è montata in serie all'avvolgimento aggiuntivo dello statore. In questo caso l'avvolgimento delle spire avviene in modo bifilare, il che garantisce che il coefficiente di autoinduzione della bobina sia molto vicino allo zero.
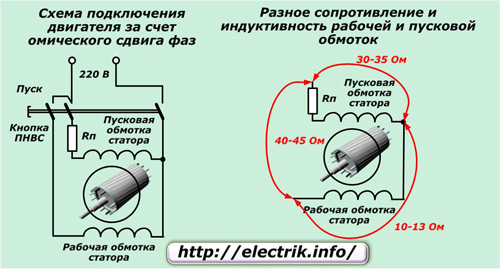
A causa dell'implementazione di queste due tecniche, quando le correnti passano attraverso diversi avvolgimenti, si verifica uno sfasamento dell'ordine di 30 gradi tra di loro, il che è abbastanza. La differenza angolare viene creata modificando le complesse resistenze in ciascun circuito.
Con questo metodo, potrebbe esserci anche avvolgimento iniziale con bassa induttanza e alta resistenza. Per questo viene utilizzato l'avvolgimento con un numero ridotto di spire di filo di sezione trasversale sottovalutata.
Lo sfasamento capacitivo delle correnti consente di creare una connessione a breve termine di un avvolgimento con un condensatore collegato in serie. Questo circuito funziona solo mentre il motore è in modalità, quindi si spegne.
L'avviamento capacitivo produce più coppia e un fattore di potenza più elevato rispetto all'avviamento resistivo o induttivo. Può raggiungere il 45÷50% del valore nominale.
In circuiti separati alla catena avvolgimento funzionante, che è costantemente attivo, aggiunge anche capacità. A causa di ciò, le correnti negli avvolgimenti vengono deviate di un angolo dell'ordine di π/2. Allo stesso tempo, nello statore è molto evidente uno spostamento dell'ampiezza massima, che fornisce una buona coppia sull'albero.
Grazie a questa tecnica, il motore è in grado di generare più potenza durante l'avviamento. Tuttavia, questo metodo viene utilizzato solo con azionamenti di avviamento pesanti, ad esempio per far girare il tamburo. lavatrice riempito di biancheria con acqua.
L'avvio del condensatore consente di modificare il senso di rotazione dell'armatura. Per fare ciò, basta cambiare la polarità della connessione dell'avvolgimento di partenza o di lavoro.
Connessione motore monofase con poli divisi
Nei motori asincroni con una piccola potenza di circa 100 W, viene utilizzata la divisione del flusso magnetico dello statore a causa dell'inclusione di una bobina di rame in cortocircuito nel polo del circuito magnetico.
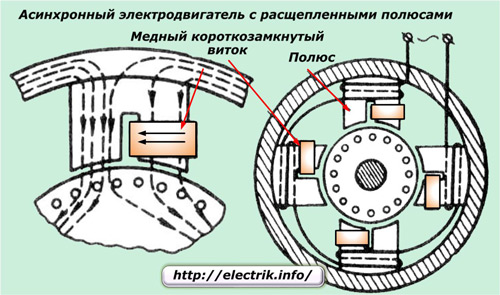
Un tale polo tagliato in due parti crea un campo magnetico aggiuntivo, che viene spostato da quello principale lungo l'angolo e lo indebolisce nel punto coperto dalla bobina. Questo crea un campo rotante ellittico che genera una coppia di direzione costante.
In tali progetti, si possono trovare shunt magnetici realizzati con piastre di acciaio che chiudono i bordi delle punte dei poli dello statore.
Motori di design simile possono essere trovati in dispositivi a ventola per soffiare aria. Non hanno la capacità di invertire.
Ti consigliamo di leggere
, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito
Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito Mele al forno con ricotta Mele al forno con ricotta
Mele al forno con ricotta Mele al forno con ricotta

