In un certo numero di paesi a macchine asincrone sono incluse anche le macchine da collezione. Un altro nome per le macchine asincrone è induzione a causa del fatto che la corrente nell'avvolgimento del rotore è indotta dal campo rotante dello statore. Le macchine asincrone oggi costituiscono la maggior parte di macchine elettriche. Sono utilizzati principalmente come motori elettrici e sono i principali convertitori. energia elettrica in meccanico.
vantaggi:
- Facilità di fabbricazione.
- Nessun contatto meccanico con la parte statica della macchina.
Screpolatura:
- Piccolo Coppia di spunto.
- Corrente di spunto significativa.
Storia
La priorità nella realizzazione di un motore a induzione spetta a Nikola Tesla, che a Budapest nella primavera del 1882 risolse il problema della realizzazione di un motore rotante campo magnetico con avvolgimento multifase fisso corrente alternata, e nel 1884 a Strasburgo dimostrò un modello funzionante del suo motore. Un contributo allo sviluppo dei motori asincroni fu dato da Galileo Ferraris, che nel 1885 costruì in Italia un modello di motore a induzione da 3 W. Nel 1888 Ferraris pubblicò la sua ricerca in un articolo per la Reale Accademia delle Scienze di Torino (nello stesso anno Tesla ricevette il brevetto USA 381.968 del 05/01/1888 ( NOI. Brevetto 0 381 968 | domanda di invenzione n. 252132 del 12/10/1887), che ha delineato base teorica motore asincrono. Il merito di Ferraris è quello di aver tratto una conclusione errata su una piccola efficienza. motore asincrono e l'inopportunità di utilizzare sistemi a corrente alternata, ha attirato l'attenzione di molti ingegneri sul problema del miglioramento delle macchine asincrone. Un articolo di Galileo Ferraris pubblicato sulla rivista Atti di Turino fu ristampato da un giornale inglese e letto nel luglio 1888 da Mikhail Osipovich Dolivo-Dobrovolsky, diplomato alla Darmstadt Higher Technical School, originario della Russia. Già nel 1889, Dolivo-Dobrovolsky ricevette un brevetto per un motore asincrono trifase con rotore a gabbia di scoiattolo e nel 1890 - brevetti in Inghilterra n. 20425 e Germania n. 75361 per un motore asincrono trifase con rotore di fase . Queste invenzioni hanno aperto l'era dell'applicazione industriale di massa delle macchine elettriche. Attualmente, il motore asincrono è il motore elettrico più comune.
Disegno
Una macchina asincrona ha uno statore e un rotore separati da un traferro. Le sue parti attive sono avvolgimenti e un circuito magnetico (nucleo); tutte le altre parti sono strutturali, fornendo la necessaria resistenza, rigidità, raffreddamento, possibilità di rotazione, ecc.
L'avvolgimento dello statore è trifase (in caso generale- avvolgimento multifase), i cui conduttori sono distribuiti uniformemente attorno alla circonferenza dello statore e sono disposti fase per fase in scanalature con una distanza angolare di 120 el.deg. Le fasi dell'avvolgimento dello statore sono collegate da schemi standard"triangolo" o "stella" e connettersi alla rete corrente trifase. Il circuito magnetico dello statore viene rimagnetizzato nel processo di modifica della corrente nell'avvolgimento dello statore, quindi viene reclutato da piastre elettriche in acciaio per garantire perdite magnetiche minime. Il metodo principale per assemblare il circuito magnetico in un pacchetto è la miscelazione.
Secondo il design del rotore, le macchine asincrone sono divise in due tipi principali: con cortocircuitato rotore e fase rotore. Entrambi i tipi hanno lo stesso design dello statore e differiscono solo per il design dell'avvolgimento del rotore. Il circuito magnetico del rotore è realizzato in modo simile al circuito magnetico dello statore - da piastre di acciaio elettrico.
rotore a gabbia di scoiattolo
Rotore di macchina asincrona a gabbia di scoiattolo
L'avvolgimento del rotore in cortocircuito, spesso chiamato "gabbia di scoiattolo" per la somiglianza esterna del design, è costituito da aste di rame o alluminio, cortocircuitate alle estremità con due anelli. Le aste di questo avvolgimento sono inserite nelle scanalature del nucleo del rotore. I nuclei del rotore e dello statore hanno una struttura ad ingranaggi. Nelle macchine di piccola e media potenza, l'avvolgimento viene solitamente realizzato versando lega di alluminio fuso nelle scanalature del nucleo del rotore. Insieme alle aste a "gabbia di scoiattolo", vengono fusi anelli di cortocircuito e lame terminali, che ventilano la macchina. Nelle macchine ad alta potenza, la "gabbia di scoiattolo" è costituita da barre di rame, le cui estremità sono collegate ad anelli di cortocircuito mediante saldatura.
Spesso le scanalature del rotore o dello statore sono smussate per ridurre l'EMF armonico maggiore causato dalle increspature del flusso magnetico dovute alla presenza di denti, la cui resistenza magnetica è significativamente inferiore alla resistenza magnetica dell'avvolgimento, nonché per ridurre il rumore causato da ragioni magnetiche. Per migliorare le prestazioni di partenza motore asincrono con un rotore a gabbia di scoiattolo, ovvero un aumento della coppia di spunto e una diminuzione della corrente di avviamento, sul rotore viene utilizzata una forma speciale della scanalatura. In questo caso, la parte esterna della scanalatura del rotore rispetto all'asse di rotazione ha una sezione trasversale minore rispetto alla parte interna. Ciò consente di utilizzare l'effetto dello spostamento di corrente, grazie al quale la resistenza attiva dell'avvolgimento del rotore aumenta in caso di grandi slittamenti (all'avvio).
I motori asincroni con rotore a gabbia di scoiattolo hanno una piccola coppia di spunto e una corrente di avviamento significativa, che è un notevole inconveniente della "gabbia di scoiattolo". Pertanto, vengono utilizzati in quegli azionamenti elettrici in cui non sono richieste grandi coppie di spunto. Tra i vantaggi va segnalata la facilità di fabbricazione e l'assenza di contatto elettrico con la parte statica della macchina, che garantisce durata nel tempo e riduce i costi di manutenzione. Con un design speciale del rotore, quando solo un cilindro cavo di alluminio ruota nel traferro, è possibile ottenere una bassa inerzia del motore.
rotore di fase
Il rotore di fase ha un avvolgimento trifase (nel caso generale, multifase), solitamente collegato secondo lo schema "a stella" e portato a collettori rotanti con l'albero della macchina. Con l'aiuto di spazzole di grafite o metallo-grafite che scorrono lungo questi anelli, nel circuito di avvolgimento del rotore:
- includere il reostato di zavorra come resistenza attiva aggiuntiva, la stessa per ciascuna fase. Riducendo la corrente di spunto, la coppia di spunto viene aumentata al valore massimo (al primo momento). Tali motori sono utilizzati per azionare meccanismi che vengono messi in azione quando carico pesante o che richiedono un controllo regolare della velocità.
- includere induttanze (induttanze) in ciascuna fase del rotore. La resistenza delle induttanze dipende dalla frequenza della corrente che scorre e, come sapete, nel rotore al primo momento dell'avvio, la frequenza delle correnti di scorrimento è la più alta. Quando il rotore gira, la frequenza delle correnti indotte diminuisce e con essa diminuisce la resistenza dell'induttore. Reattanza induttiva nel circuito del rotore di fase consente di automatizzare la procedura di avviamento del motore e, se necessario, di "prendere" il motore, la cui velocità è diminuita a causa del sovraccarico. L'induttanza mantiene le correnti del rotore a un livello costante.
- includere la fonte corrente continua, ottenendo così una macchina sincrona.
- includono l'alimentazione dall'inverter, che consente di controllare le caratteristiche di velocità e coppia del motore. Questa è una modalità di funzionamento speciale (macchina a doppia alimentazione). È possibile inserire la tensione di rete senza inverter, con una fasatura opposta a quella con cui viene alimentato lo statore.
Motore Schrage-Richter
Motore asincrono a collettore trifase alimentato dal lato rotore.
Motore asincrono invertito (alimentato dal rotore), che consente di regolare dolcemente la velocità dal minimo (l'intervallo è determinato dai dati di avvolgimento dell'avvolgimento aggiuntivo utilizzati per ottenere fem aggiuntiva, introdotta con la frequenza di scorrimento nel circuito secondario di macchina) al massimo, che normalmente è al di sopra del sincronismo di velocità. Prodotto fisicamente cambiando la soluzione di un doppio set di spazzole per ogni "Fase" del circuito secondario del motore. Pertanto, riorganizzando le traverse delle spazzole utilizzando un dispositivo meccanico (volantino o altro attuatore), è stato possibile controllare in modo molto economico la velocità di un motore a induzione CA. L'idea del controllo in generale è estremamente semplice e verrà implementata in seguito nelle cosiddette cascate di valvole asincrone, dove nel circuito del rotore di fase era incluso un convertitore a tiristori, che funzionava come inverter o in modalità raddrizzatore. L'essenza dell'idea è che una fem aggiuntiva viene introdotta nel circuito secondario di un motore a induzione. ampiezza e fase variabili con frequenza di scorrimento. Il collettore svolge il compito di far corrispondere la frequenza della fem aggiuntiva con la frequenza di scorrimento del rotore. Se l'e.m.f. è opposto a quello principale, la potenza viene emessa dal circuito secondario del motore con una corrispondente diminuzione della velocità della macchina, il limite di velocità è dettato solo dalle condizioni di raffreddamento degli avvolgimenti). Nel punto di sincronismo della macchina, la frequenza della fem aggiuntiva. è uguale a zero, cioè una corrente continua viene fornita al circuito secondario dal collettore. In caso di sommatoria dell'e.m.f. con quello principale, la potenza aggiuntiva viene invertita nel circuito secondario della macchina e, di conseguenza, l'accelerazione al di sopra della velocità sincrona. Pertanto, il risultato della regolamentazione è stata una famiglia di caratteristiche piuttosto rigide con decrescenti momento critico durante la decelerazione e quando si accelera al di sopra della velocità sincrona - con il suo aumento proporzionale.
Di particolare interesse è il funzionamento della macchina con una soluzione asimmetrica di traverse a spazzola. In questo caso, il diagramma vettoriale della fem aggiuntiva. il motore riceve la cosiddetta componente tangenziale, che consente di lavorare con una risposta capacitiva alla rete.
Strutturalmente il motore è una macchina capovolta, dove sul rotore sono adagiati due avvolgimenti: alimentazione da collettori rotanti e un avvolgimento collegato tramite due coppie di spazzole per “fase” all'avvolgimento secondario dello statore. In effetti, queste due parti avvolgimento secondario A seconda della posizione delle traverse della spazzola, si accende o l'una rispetto all'altra o in direzioni opposte. Ecco come funziona la regolamentazione.
Tali motori hanno ricevuto il maggiore sviluppo negli anni '30 del XX secolo. Nell'Unione Sovietica, con la sua bassa cultura di produzione dell'industria elettrica, le macchine per collettori AC (ACC) non hanno ricevuto alcuna distribuzione e sviluppo evidenti a causa dei maggiori requisiti per la produzione del gruppo collettore-spazzola e del costo complessivo elevato. Penetrarono nel territorio dell'URSS principalmente come parte di apparecchiature acquistate all'estero e, alla prima occasione, furono sostituiti da macchine a corrente continua meno efficienti, ma più economiche o motori asincroni con rotore di fase. I metodi esistenti per il calcolo del c.m.f. sviluppato dall'accademico M.P. Kostenko (nei suoi libri di testo, le macchine asincrone si dividono in collettore e macchine brushless) sono considerate un criterio sufficiente per le prestazioni della macchina controllandola in base alle condizioni di commutazione (per confronto, il calcolo termico è fondamentale per un motore a corrente continua) .
Al momento, il motore Schrage è interessante esclusivamente come un eccellente aiuto visivo per gli studenti. Secondo L. Ya. Telichko, insegnante del dipartimento di azionamento elettrico dell'Università tecnica di Lipetsk, " miglior modello, dove la teoria e la pratica della cascata possono essere toccate con le mani, è impossibile da trovare.
Principio operativo
applicato all'avvolgimento dello statore Tensione AC, sotto l'azione della quale una corrente scorre attraverso questi avvolgimenti e crea un campo magnetico rotante. Il campo magnetico agisce sull'avvolgimento del rotore e, secondo la legge dell'induzione elettromagnetica, induce in essi un EMF. Nell'avvolgimento del rotore, sotto l'azione dell'EMF indotto, si forma una corrente. La corrente nell'avvolgimento del rotore crea il proprio campo magnetico, che interagisce con il campo magnetico rotante dello statore. Di conseguenza, su ciascun dente del circuito magnetico del rotore agisce una forza che, sommandosi lungo la circonferenza, crea un momento elettromagnetico rotante che fa ruotare il rotore.
Velocità di rotazione del campo dello statore
Quando l'avvolgimento dello statore viene alimentato con una corrente trifase (nel caso generale, multifase), si crea un campo magnetico rotante la cui frequenza di rotazione sincrona [rpm] è correlata alla frequenza di rete [Hz] dal rapporto:
,dove è il numero di coppie di poli magnetici dell'avvolgimento dello statore.
A seconda del numero di coppie di poli, sono possibili i seguenti valori delle frequenze di rotazione del campo magnetico dello statore, ad una frequenza della tensione di alimentazione di 50 Hz:
| n, giri/min | |
|---|---|
| 3000 | 1 |
| 1500 | 2 |
| 1000 | 3 |
| 300 | 10 |
La maggior parte dei motori ha 1-3 paia di poli, raramente 4. Più poli vengono usati molto raramente, tali macchine hanno un basso rendimento e fattore di potenza, ma consentono al rotore del motore di ruotare in modo molto fluido e lento.
Modalità operative
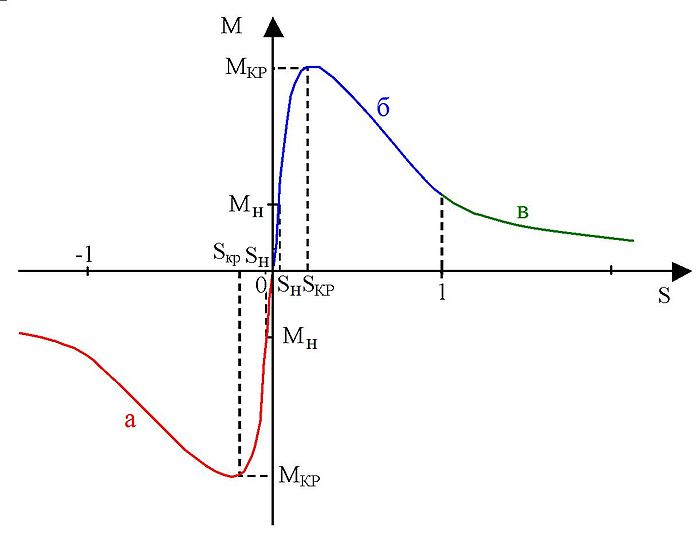
Caratteristiche meccaniche di una macchina asincrona: a - modalità di recupero dell'energia alla rete (modalità generatore), b - modalità motore, c - modalità di controinclusione (modalità freno elettromagnetico).
Modalità motore
Se il rotore è fermo o la sua frequenza di rotazione è inferiore a quella sincrona, il campo magnetico rotante attraversa i conduttori dell'avvolgimento del rotore e induce in essi un EMF, sotto l'azione del quale appare una corrente nell'avvolgimento del rotore. Le forze elettromagnetiche agiscono sui conduttori con la corrente di questo avvolgimento (o meglio, sui denti del nucleo del rotore); la loro forza totale forma una coppia elettromagnetica che trascina il rotore insieme al campo magnetico. Se questo momento è sufficiente per vincere le forze di attrito, il rotore inizia a ruotare e la sua velocità di rotazione costante [rpm] corrisponde all'equazione coppia elettromagnetica freno, creato dal carico sull'albero, forze di attrito nei cuscinetti, ventilazione, ecc. La velocità del rotore non può raggiungere la velocità del campo magnetico, poiché in questo caso la velocità angolare di rotazione del campo magnetico rispetto all'avvolgimento del rotore diventerà uguale a zero, il campo magnetico cesserà di indurre nell'avvolgimento del rotore EMF e, a sua volta, creerà coppia; Pertanto, per la modalità di funzionamento del motore di una macchina asincrona, la disuguaglianza è vera:
.Viene chiamata la differenza relativa tra le frequenze di rotazione del campo magnetico e del rotore scorrevole:
.È ovvio che in modalità motore.
modalità generatore
Se il rotore viene accelerato con l'aiuto di una coppia esterna (ad esempio, da un motore) a una frequenza maggiore della frequenza di rotazione del campo magnetico, la direzione dell'EMF nell'avvolgimento del rotore e il componente attivo del la corrente del rotore cambierà, cioè la macchina asincrona entrerà modalità generatore. Allo stesso tempo, cambierà anche la direzione della coppia elettromagnetica, che diventerà frenante. Scivola in modalità generatore.
Per far funzionare una macchina asincrona in modalità generatore, è necessaria una fonte di energia reattiva che crei un campo magnetico. In assenza di un campo magnetico iniziale nell'avvolgimento statorico, il flusso viene creato utilizzando magneti permanenti, oppure con un carico attivo dovuto all'induzione residua della macchina e condensatori collegati in parallelo alle fasi dell'avvolgimento statorico.
Un generatore asincrono consuma corrente reattiva e richiede la presenza di generatori di potenza reattiva nella rete sotto forma di macchine sincrone, compensatori sincroni, banchi di condensatori statici (BSK). Per questo, nonostante la facilità di manutenzione, generatore asincrono sono utilizzati relativamente raramente, principalmente come generatori eolici a bassa potenza, fonti ausiliarie di bassa potenza e dispositivi di frenatura. Ma la modalità generatore di un motore asincrono viene utilizzata abbastanza spesso. In questa modalità funzionano i motori delle scale mobili della metropolitana, che scendono. Nella modalità generatore, i motori dell'ascensore funzionano, a seconda del rapporto tra il peso nella cabina e nel contrappeso.
Modalità stand-by
La modalità inattiva di un motore asincrono si verifica quando non c'è carico sull'albero sotto forma di riduttore e corpo funzionante. Dall'esperienza del minimo si possono determinare i valori della corrente magnetizzante e le perdite di potenza nel circuito magnetico, nei cuscinetti e nella ventola. Veramente inattivo S=0,01-0,08. In perfetto stato di inattività n 2 =n 1, quindi S=0 (in effetti, questa modalità è irraggiungibile, anche supponendo che l'attrito nei cuscinetti non crei la propria coppia di carico - il principio stesso del funzionamento del motore implica che il rotore sia in ritardo rispetto al campo dello statore per creare un campo del rotore. quando S=0 il campo dello statore non attraversa gli avvolgimenti del rotore e non può indurre corrente in esso, il che significa che il campo magnetico del rotore non viene creato.)
Modalità freno elettromagnetico (opzione)
Se si cambia la direzione di rotazione del rotore o del campo magnetico in modo che ruotino in direzioni opposte, l'EMF e il componente attivo della corrente nell'avvolgimento del rotore verranno diretti allo stesso modo della modalità motore e la macchina consumerà energia attiva dalla rete. Tuttavia, il momento elettromagnetico sarà diretto opposto al momento del carico, essendo un momento frenante. Per il regime valgono le seguenti disuguaglianze:
Questa modalità viene utilizzata per un breve periodo, poiché durante essa viene generato molto calore nel rotore, che il motore non è in grado di dissipare, il che può danneggiarlo.
Per una frenata più morbida è possibile utilizzare la modalità generatore, ma è efficace solo a giri prossimi a quelli nominali.
Modi per controllare un motore asincrono
Sotto il controllo di un motore AC asincrono si intende una variazione della velocità del rotore e/o della sua coppia. Esistono i seguenti modi per controllare un motore asincrono:
- reostatico: modifica della velocità di rotazione dell'IM con un rotore di fase modificando la resistenza del reostato nel circuito del rotore, inoltre, ciò aumenta la coppia di spunto;
- frequenza: modifica della velocità di rotazione dell'INFERNO modificando la frequenza della corrente nella rete di alimentazione, che comporta una variazione della frequenza di rotazione del campo dello statore. Il motore si accende tramite convertitore di frequenza;
- commutando gli avvolgimenti dal circuito "stella" al circuito "triangolo" nel processo di avviamento del motore, che riduce le correnti di avviamento negli avvolgimenti di circa tre volte, ma allo stesso tempo diminuisce anche la coppia;
- pulsato - fornendo un tipo speciale di tensione di alimentazione (ad esempio, dente di sega);
- l'introduzione di fem addizionale secondo o contraria alla frequenza di scorrimento nel circuito secondario;
- variazione del numero di coppie di poli, se tale commutazione è prevista in modo costruttivo (solo per rotori in cortocircuito);
- modificando l'ampiezza della tensione di alimentazione, quando cambia solo l'ampiezza (o valore effettivo) della tensione di controllo. Quindi i vettori di tensione di controllo e di eccitazione rimangono perpendicolari (avvio autotrasformatore);
- il metodo ampiezza-fase comprende due metodi descritti;
- inclusione nel circuito di potenza dello statore dei reattori;
Appunti
Guarda anche
- Veshenevsky S. N. Caratteristiche dei motori in un azionamento elettrico. Edizione 6, rivista. Mosca, Casa editrice Energia, 1977. Tiratura 40.000 copie. UDC 62-83:621.313.2
Collegamenti
- Il dispositivo e il principio di funzionamento dei motori elettrici asincroni
- Gaidullin Alexander "Assemblaggio di un motore asincrono 4A200"
- Motore elettrico asincrono di corrente trifase M. O. Dolivo-Dobrovolsky
| |||||||||||
Il dispositivo di una macchina asincrona. La parte fissa di una macchina a corrente alternata è chiamata statore e la parte mobile lo è
rotore. I nuclei dello statore e del rotore delle macchine asincrone sono assemblati da lamiere di acciaio elettrico (Fig. 19-1), che di solito sono rivestite su entrambi i lati con una vernice isolante a base di olio di colofonia prima del montaggio. I nuclei delle macchine a bassa potenza sono talvolta assemblati da lamiere non verniciate, poiché in questo caso uno strato di ossidi naturale o creato artificialmente sulla superficie delle lamiere di acciaio è un isolamento sufficiente.
Sulla fig. La Figura 19-2 è una vista esplosa di un piccolo motore a induzione di potenza che mostra lo statore, il rotore e le protezioni terminali. Sulla fig. 19-3 è un disegno di un motore a induzione di media potenza.
Riso. 19-1. Lamiere del nucleo dello statore (1) e rotore (2) di una macchina asincrona di piccola e media potenza
Il nucleo dello statore è fissato nell'alloggiamento e il nucleo del rotore - sull'albero^ (macchine di bassa e media potenza) o su un cerchio con un mozzo e un manicotto posti sull'albero (macchine ad alta potenza) L'albero del rotore ruota in cuscinetti che sono posizionati negli scudi dei cuscinetti fissati all'alloggiamento dello statore (macchine kovy "stack 11 М0ШН0Стиi) "o su cuscinetti montati su pezzo
Sulla superficie cilindrica interna dello statore e sulla superficie cilindrica esterna del rotore sono presenti scanalature,

Riso. 19-2. Foto di un motore asincrono con rotore a gabbia di scoiattolo tipo A71-6 con una potenza di 14 ket smontato
in cui sono posti i conduttori degli avvolgimenti dello statore e del rotore. L'avvolgimento dello statore è generalmente trifase (vedi Cap. 21); è collegato ad una rete in corrente trifase ed è quindi chiamato anche avvolgimento primario. L'avvolgimento del rotore può anche essere trifase simile all'avvolgimento dello statore. Le estremità delle fasi di un tale avvolgimento del rotore sono solitamente collegate a una stella e gli inizi vengono evidenziati con l'aiuto di collettori rotanti e spazzole di metallo-grafite (Fig. 19-3). Tale macchina asincrona è chiamata macchina a rotore avvolto. Un reostato di avviamento o regolazione trifase è solitamente collegato agli anelli collettori. L'avvolgimento di fase del rotore viene eseguito con lo stesso numero di poli del campo magnetico dello statore.
Un altro tipo di avvolgimento del rotore è un avvolgimento a forma di gabbia di scoiattolo (Fig. 19-4). In questo caso, in ogni scanalatura è presente un'asta di rame o alluminio e le estremità di tutte le aste
da entrambe le estremità del rotore sono collegati anelli di rame o alluminio, che cortocircuitano le aste. Le aste di solito non sono isolate dal nucleo. In macchine fino a 1QG k&p aste e anelli, insieme alle ali per la ventilazione, sono solitamente realizzati versando alluminio nel rotore
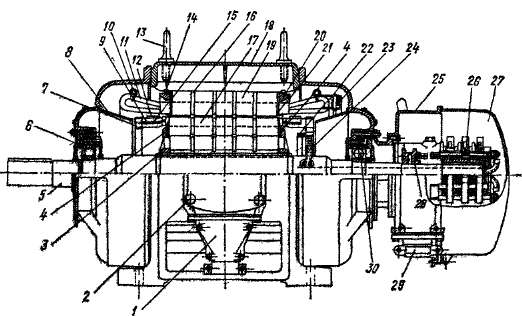
Figura 19-3 Motore a induzione a rotore avvolto 180 trifase ket,
975 giri/min
1 - scatola dei cavi, 2 - scatola di uscita delle estremità dell'avvolgimento dello statore, 3 - tasselli ad anello per il fissaggio del nucleo del rotore, 4 - idropulitrici del nucleo del rotore, 5 - albero del rotore, 6 e 30 - cuscinetti a sfere e a rulli, 7 - collari di collegamento in rame delle aste di avvolgimento del rotore, 8 -^ diffusori per convogliare l'aria di raffreddamento in ingresso attraverso gli schermi di rivestimento, 9 - aste di avvolgimento^ del rotore, "10 - anelli di sicurezza, // - avvolgimento dello statore, 12 - bende di filo! rotore, 13 - anelli di sollevamento, /* - chiavi ad arco, 15 - guarnizioni isolanti ad anello, 16 - condotti di ventilazione radiali, 17 - nucleo del rotore, È->j corpo statore fuso, 19 - nucleo dello statore, 20 e 21 - pastiglie di pressione e anello del nucleo dello statore, 22 - un anello per collegare le estremità dell'avvolgimento del rotore in una stella, 23 - «collegamenti intercoil e intergruppo dell'avvolgimento statorico, 34 - conclusioni di coc* tsov dell'avvolgimento del rotore agli anelli collettori,. 25 e 27 - scatola e tappo degli anelli collettori, 26 - anelli di contatto, 28 - manicotto mobile con contatti per chiuso^. i cavi dell'avvolgimento del rotore sono cortocircuitati, 29 - giunto per l'uscita degli avvolgimenti rotra cond
al circuito esterno
(Vedere Fig. J9-2). Tale macchina asincrona è chiamata macchina a gabbia di scoiattolo. La maggior parte delle macchine crono, in particolare macchine di piccola e media potenza, sono dotate di un gpTopOM in cortocircuito.
Il traferro tra lo statore e il rotore nelle macchine asincrone è il minimo possibile in termini di condizioni di produzione e affidabilità di funzionamento, e più grande è la macchina, più grande è. Nelle macchine con una potenza di diversi kilowatt, il divario
è 0,4-0,5 mm, e in macchine ad alta potenza - pochi millimetri.
Le macchine asincrone sono generalmente raffreddate ad aria. I sistemi di ventilazione sono in linea di principio gli stessi delle macchine DC (vedi § 8-5).
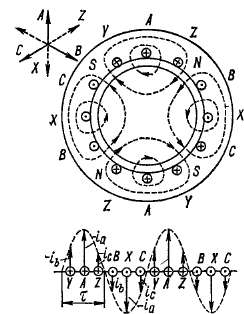
Campo magnetico rotante. Sulla fig. 19-5 sono sezioni trasversali di un bipolare (2p- 2) un motore a induzione e mostra la natura del campo magnetico dello statore per due momenti.
Sulla fig. 19-5 mostra l'avvolgimento statorico più semplice, quando ogni fase è composta da un giro o due conduttori (1a fase - conduttori MA e X, 2a fase - conduttori A e Y, 3a fase - conduttori DA e Z) 1 . I conduttori di ogni giro (fase) si trovano - l'uno dall'altro a una distanza di divisione dei poli
dove D a- il diametro del foro interno dello statore, ar - il numero di coppie di poli.
Sulla fig. 19-5 La divisione dei poli fa un giro chiuso e avvolgente. Passo della bobina o dell'avvolgitore a forma di chiglia di scoiattolo a quindi è completo (a= t). Due cellule
360° el. Inizio delle fasi A, B, C spostati l'uno rispetto all'altro di 120 ° el., che in questo caso è un terzo del cerchio.
Sulla fig. 19-5, un le direzioni delle correnti nei conduttori dell'avvolgimento dello statore sono mostrate per il momento in cui Io miro e io b= io c =
- - *)t- Correnti di fase in fig. 19-5 sono considerati positivi quando
sono all'inizio delle fasi (conduttori A, B, C) diretto oltre il piano del disegno. Sulla fig. 19-5, b vengono mostrate le direzioni delle correnti per l'istante in cui le fasi delle correnti sono cambiate di 30° e
Dalla fig. 19-5 si può notare che la distribuzione delle correnti attorno alla circonferenza dello statore è di due zone, ciascuna con un valore di m, e la direzione è
1 Secondo GOST 183-66, l'inizio delle fasi degli avvolgimenti dello statore è designato C 1 (C 2, Dal 3, le loro estremità - rispettivamente C 4, C 8, C g, e l'inizio delle fasi degli avvolgimenti del rotore - Pi, P 2 > ^z- In questo libro, a fini metodologici, gli inizi degli avvolgimenti trifase sono indicati ovunque A, B, C o un, avanti Cristo, e le estremità - rispettivamente L, Y, Z o x, y, g.
![]()
le correnti in queste zone sono opposte. In fondo alla Fig. 19-5 mostra le curve di distribuzione della corrente lungo lo statore dispiegato.
|Da queste curve si evince che le correnti sono distribuite sulla superficie dello statore secondo una legge sinusoidale |
Vengono create le correnti dei conduttori dell'avvolgimento dello statore di una macchina a due poli, come segue dalla Fig. 19-5, flusso magnetico bipolare
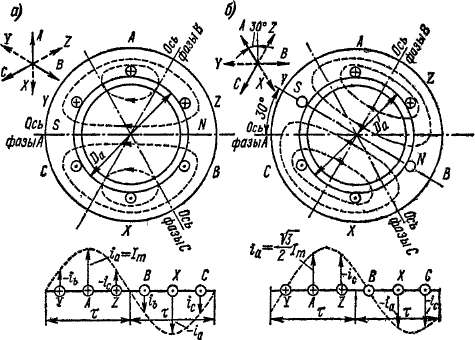
Riso. 19-5. L'avvolgimento statorico più semplice di una macchina asincrona con 2p = 2 e il suo campo magnetico
Ф 1 (passando attraverso lo statore, il rotore e il traferro tra di loro. Dal confronto di Fig. 19-5, ai b Si può notare che quando la fase delle correnti cambia di 30°, la curva di distribuzione della corrente ed il flusso magnetico ruotano nel senso delle fasi anche di 30° el.
L'asse del giro (avvolgimento) della fase MA in fig. 19-5 è diretto orizzontalmente e l'asse del flusso magnetico a io a = lm(Fig. 19-5, a) è anche diretto orizzontalmente. È chiaro che se la fase delle correnti confrontata con la Fig. 19-5, un cambierà di 120° e quindi sarà io b \u003d io sono, quindi il flusso magnetico sarà diretto lungo l'asse delle fasi A, cioè girerà di 120° el. Nel momento in cui circuito integrato- Io sono , l'asse del flusso magnetico coincide con l'asse della fase C, ecc.
Pertanto, l'avvolgimento dello statore di una macchina bipolare, quando alimentato da una corrente trifase, crea un campo magnetico rotante bipolare.
In questo caso, per un periodo di variazione della corrente, il campo ruota di 2 tonnellate o 360° el.
Velocità di rotazione del campo
n i - h giri/min,
dove fi è la frequenza della corrente dello statore.
Il campo magnetico ruota nella direzione della sequenza di fase A, B, C avvolgimenti dello statore. Per cambiare la direzione di rotazione del campo in senso opposto, è sufficiente cambiare posizione sui morsetti dell'avvolgimento In ki le estremità dello statore di due conduttori provenienti dalla rete.
Con 2p \u003d 4, la divisione dei poli è un quarto di cerchio e ogni fase dell'avvolgimento dello statore trifase più semplice (Fig. 19-6) è composta da due giri con un gradino y = x, che sono spostati l'uno rispetto all'altro di 2 m e possono essere collegati tra loro in serie o in parallelo. Le singole fasi e i loro inizi A, B, C mentre anche spostati l'uno rispetto all'altro di 120 ° el. o in questo caso 1/6 del cerchio. Dalla fig. 19-6 si può vedere che un tale avvolgimento crea una curva di distribuzione della corrente e un campo magnetico con 2p \u003d 4. Anche questo campo sta ruotando e per uno
il periodo della corrente ruota anche di 2 m, o in questo caso di mezzo cerchio, per cui la velocità di campo
pg = y, obIsec.
Nel caso generale è possibile realizzare un avvolgimento con 2p = 6, 8, 10, ecc. In questo caso si otterrà una curva di distribuzione della corrente e un campo magnetico con p coppie di poli. Il campo magnetico ruota ad una velocità
Riso. 19-6. L'avvolgimento più semplice
statore di una macchina asincrona con
2p - 4 e il suo campo magnetico

Velocità periferica lineare di rotazione del campo lungo la circonferenza dello statore
Alla frequenza della corrente industriale standard in URSS / = 50 Hz si ottengono le velocità di rotazione del campo, indicate in tabella. 19-1.
Tabella 19-1
La velocità di rotazione del campo magnetico degli avvolgimenti con diversi numeri di coppie di poli R a L = 50 Hz
| R | ||||||||||
| Px, R/MUH |
Quando si progettano avvolgimenti in corrente alternata, si sforzano (vedi Cap. 21) in modo che la distribuzione dell'induzione del campo rotante nel traferro lungo la circonferenza sia il più vicino possibile a sinusoidale.
Più avanti in questo capitolo, si presumerà che questa distribuzione sia sinusoidale.
Il principio di funzionamento di una macchina asincrona. Il flusso magnetico Ф 1 (creato dall'avvolgimento dello statore (Fig. 19-5 e 19-6), durante la sua rotazione, attraversa i conduttori dell'avvolgimento del rotore, inducendo in essi la fem. ep, e se l'avvolgimento del rotore è chiuso, in esso sorgono correnti c, la cui frequenza f 2 con un rotore stazionario (i \u003d 0) è uguale alla frequenza primaria f t .
Se l'avvolgimento del rotore è trifase, viene indotta una corrente trifase. Questa corrente crea un flusso rotante del rotore F 2, il numero di poli 2 p, la cui direzione e velocità di rotazione a n = 0
uguale al flusso dello statore. Quindi scorre Fg e F a ruotano in modo sincrono e formano un flusso rotante comune del motore F. Con un rotore a gabbia, un sistema multifase di correnti % viene indotto nelle sue aste con uno sfasamento nelle aste adiacenti di un angolo
![]()

dove Z 2 è il numero di aste del rotore. Queste correnti creano anche un flusso rotante Ф 2, il numero di poli, la cui direzione e velocità di rotazione sono uguali a quelle del flusso del rotore di fase. Pertanto, in questo caso, nel motore si forma anche un flusso magnetico comune F. Data l'esistenza di un campo magnetico rotante comune, si può considerare e. d.s., indotto negli avvolgimenti da questo campo.
Come risultato dell'interazione delle correnti del rotore con il flusso, si creano forze meccaniche che agiscono sui conduttori del rotore F e momento elettromagnetico rotante M.
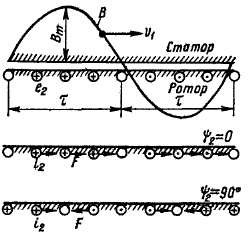
Nella parte superiore della Fig. 19-7 mostra un'onda sinusoidale del campo magnetico generale che ruota ad una velocità i>i A macchine e direzioni e. ds e 2 indotto da questo campo nelle aste di un rotore fisso a gabbia di scoiattolo. In fondo alla Fig. 19-7 mostra le direzioni delle correnti delle aste, c e le forze che agiscono su di loro F per due casi: quando l'angolo di sfasamento "fa tra e e r 2 è zero e quando ■ph 2 \u003d 90, At% \u003d 0, tutte le forze agiscono nella direzione del campo di rotazione. Pertanto, la coppia
Figura 19-7. Correnti nelle aste dell'avvolgimento del rotore e forze che agiscono su di esse
è diverso da zero e agisce anche nel senso di rotazione del campo. Allo stesso tempo, a t | e a \u003d 90 °, le forze agiscono lati diversi
e M= 0.
Ne consegue che la coppia è creata solo dal componente attivo della corrente del rotore
Questa conclusione è di carattere generale ed è valida anche per altri tipi di macchine AC.
Il circuito del rotore di un motore asincrono ha sempre una certa resistenza attiva e, quindi, all'avvio del motore (n = 0) sempre 0< t|) 2 < 90°. В результате развиваемый момент M> Q, e se è maggiore della coppia frenante statica sull'albero, il rotore del motore inizierà a ruotare nel senso di rotazione del campo con una certa velocità P<; p b cioè, ruoterà con un certo ritardo, o slittamento, rispetto al campo dello statore,
![]()
![]()
Differenza relativa tra le velocità di rotazione del campo e del rotore

chiamato slip. Lo scontrino è espresso anche in percentuale:
Velocità del rotore P, espresso in termini di slip s, secondo la formula (19-6), è uguale a
Quando si avvia il motore (P= 0) abbiamo s = 1, e quando il rotore ruota in modo sincrono con il campo dello statore o, come si suol dire, con velocità sincrona (P= p d) sarà s = O. Quando n = nx il campo magnetico dello statore relativo al rotore è stazionario e le correnti nel rotore non saranno indotte, quindi M= 0 e il motore non può raggiungere tale velocità di rotazione. Di conseguenza, in modalità motore è sempre 0< /г <п х e l>s>0.
Quando il rotore ruota verso il campo, la frequenza di attraversamento dei conduttori del rotore da parte del campo è proporzionale alla differenza di velocità tii- P e la frequenza della corrente nell'avvolgimento del rotore
Sostituendo il valore qui P dalla formula (19-7) e poi il valore nx da (19-2), otteniamo
cioè la frequenza secondaria è proporzionale allo scorrimento.
Alla frequenza attuale / 2< f t anche la velocità di rotazione del campo del rotore rispetto al rotore stesso n 2p è inferiore pag e sulla base dell'espressione (19-9)
Velocità di rotazione del campo rotorico rispetto allo statore secondo le espressioni (19-7) e (19-10)
cioè la velocità di rotazione del campo del rotore rispetto allo statore a qualsiasi velocità di rotazione del rotore P uguale alla velocità di rotazione del campo statorico px. Pertanto, anche i campi dello statore e del rotore con un rotore rotante ruotano sempre in modo sincrono e formano un campo rotante comune.
Si noti che mostrato in Fig. 19-7 il quadro delle direzioni delle correnti e delle forze meccaniche è valido anche quando il rotore ruota, quando 0< P< nx(modalità motore).
Se il rotore di una macchina asincrona con l'aiuto di una forza esterna (coppia) viene portato in rotazione nella direzione di rotazione del campo dello statore a una velocità superiore a quella sincrona (P> pd), quindi il rotore supererà il campo e le direzioni delle correnti indotte nell'avvolgimento del rotore rispetto a quelle mostrate in Fig. 19-7 è ribaltato. In questo caso, anche le direzioni delle forze elettromagnetiche sono invertite F e momento elettromagnetico M. Momento M in questo caso frenerà e la macchina lavorerà in modalità generatore e darà potenza attiva alla rete. Secondo l'espressione (19-6), nel modo generatore s< 0.
Se il rotore viene ruotato nella direzione opposta al senso di rotazione del campo dello statore (P< 0), то указанные на рис. 19-7 направления е 2 , / 2 и F viene salvato. Momento elettromagnetico M agirà nel senso di rotazione del campo dello statore, ma rallenterà la rotazione del rotore. Questa modalità di funzionamento di una macchina asincrona è chiamata modalità di controinclusione o modalità di freno elettromagnetico. In questa modalità, secondo l'espressione (19-6) s> 1.
Le modalità di funzionamento di una macchina asincrona sono discusse più dettagliatamente nella sezione successiva. Qui, però, va notato che la relazione (19-11), come è facile vedere, è conservata in qualsiasi modo di funzionamento, per qualsiasi valore di s, cioè i campi dello statore e del rotore ruotano in modo sincrono in qualsiasi modalità di funzionamento della macchina asincrona.
Una macchina asincrona è una macchina AC brushless in cui un campo magnetico rotante viene eccitato durante il funzionamento, ma il rotore ruota in modo asincrono, cioè con velocità angolare diversa dalla velocità angolare del campo.
I motori a induzione sono i più comuni di tutti i motori. I loro vantaggi risiedono nella semplicità del dispositivo, nell'elevata affidabilità e nel costo relativamente basso.
I motori asincroni trifase proposti da M.O. Dolivo-Dobrovolsky nel 1888. Vengono eseguiti con una potenza da frazioni di watt a migliaia di kilowatt, con una frequenza di rotazione da 500 a 3000 giri/min e una tensione fino a 10 kV. I motori asincroni monofase sono utilizzati per azionare elettrodomestici, utensili elettrici, nei circuiti di automazione. Sono alimentati da un circuito monofase e hanno una potenza, di norma, non superiore a 0,5 kW.
Le macchine asincrone possono funzionare in modalità generatore. Ma come fonti di energia elettrica, non vengono quasi mai utilizzate, poiché non hanno una propria fonte di eccitazione del flusso magnetico e sono inferiori ai generatori sincroni in termini di prestazioni.
Le macchine asincrone sono utilizzate come regolatori di tensione, regolatori di fase, convertitori di frequenza, ecc.
Gli svantaggi delle macchine asincrone sono la complessità e la regolazione antieconomica delle loro prestazioni.
Un motore asincrono è costituito da uno statore, un rotore e protezioni terminali. Lo statore è la parte fissa del motore e ha una forma cilindrica. È costituito da un corpo, un nucleo e un avvolgimento. Il corpo è in acciaio fuso o ghisa. Il circuito magnetico dello statore è assemblato da sottili lamiere di acciaio elettrico. Sulla superficie interna presenta scanalature in cui si inserisce l'avvolgimento dello statore. Il rotore di un motore a induzione - la parte rotante - è costituito da un albero in acciaio, un circuito magnetico costituito da lamiere di acciaio elettrico con scanalature stampate. L'avvolgimento del rotore può essere in cortocircuito o in fase. L'avvolgimento in cortocircuito è costituito da barre di alluminio o rame cortocircuitate su entrambe le estremità del rotore. Il rotore di fase ha un avvolgimento trifase collegato a una stella. I conduttori dell'avvolgimento sono collegati agli anelli sull'albero e sono collegati a un reostato o altro dispositivo con l'aiuto di spazzole. Il rotore rotante è posizionato su un albero comune con uno statore. L'albero ruota negli schermi dei cuscinetti. Il collegamento dell'avvolgimento dello statore viene effettuato in una scatola in cui vengono portati gli inizi delle fasi C 1, C 2, C 3 e le estremità delle fasi C 4, C 5, C 6. Sulla fig. mostra la disposizione di queste conclusioni (a) e i modi per collegarle tra loro quando si collegano gli avvolgimenti di fase con una stella (b) e un triangolo (c).
Se nel passaporto del motore sono indicate due tensioni, ad esempio 380/220, una connessione a stella corrisponde a una tensione più alta, una connessione triangolare a una più piccola. In entrambi i casi la tensione di fase del motore è di 220 V.
L'avvolgimento dello statore trifase crea un campo magnetico che ruota ad una velocità 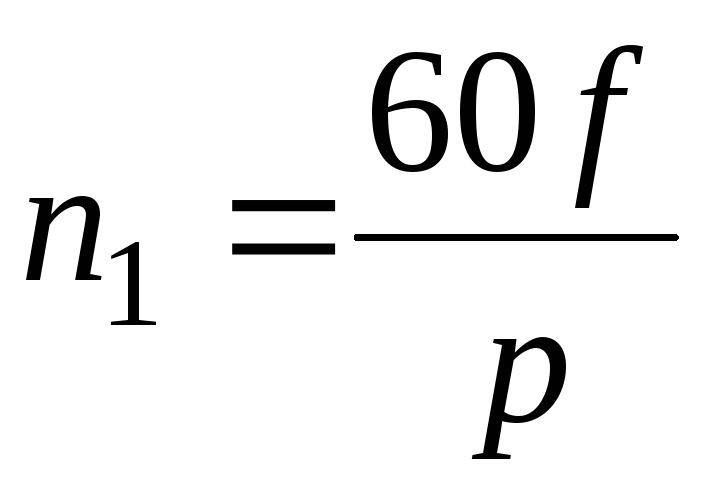 .
.
L'interazione elettromagnetica tra lo statore e il rotore si verifica solo quando la velocità del campo dello statore e la velocità di rotazione del rotore non sono uguali.
Campo magnetico rotante dello statore di una macchina asincrona. Frequenza di rotazione del campo statorico, scorrimento (Caratteristiche).
La base dell'azione di un motore a induzione è un campo magnetico rotante. Il principio per ottenere un campo magnetico rotante è che se le correnti sfasate fluiscono attraverso un sistema di conduttori distribuiti nello spazio lungo un cerchio, nello spazio viene creato un campo rotante.
R 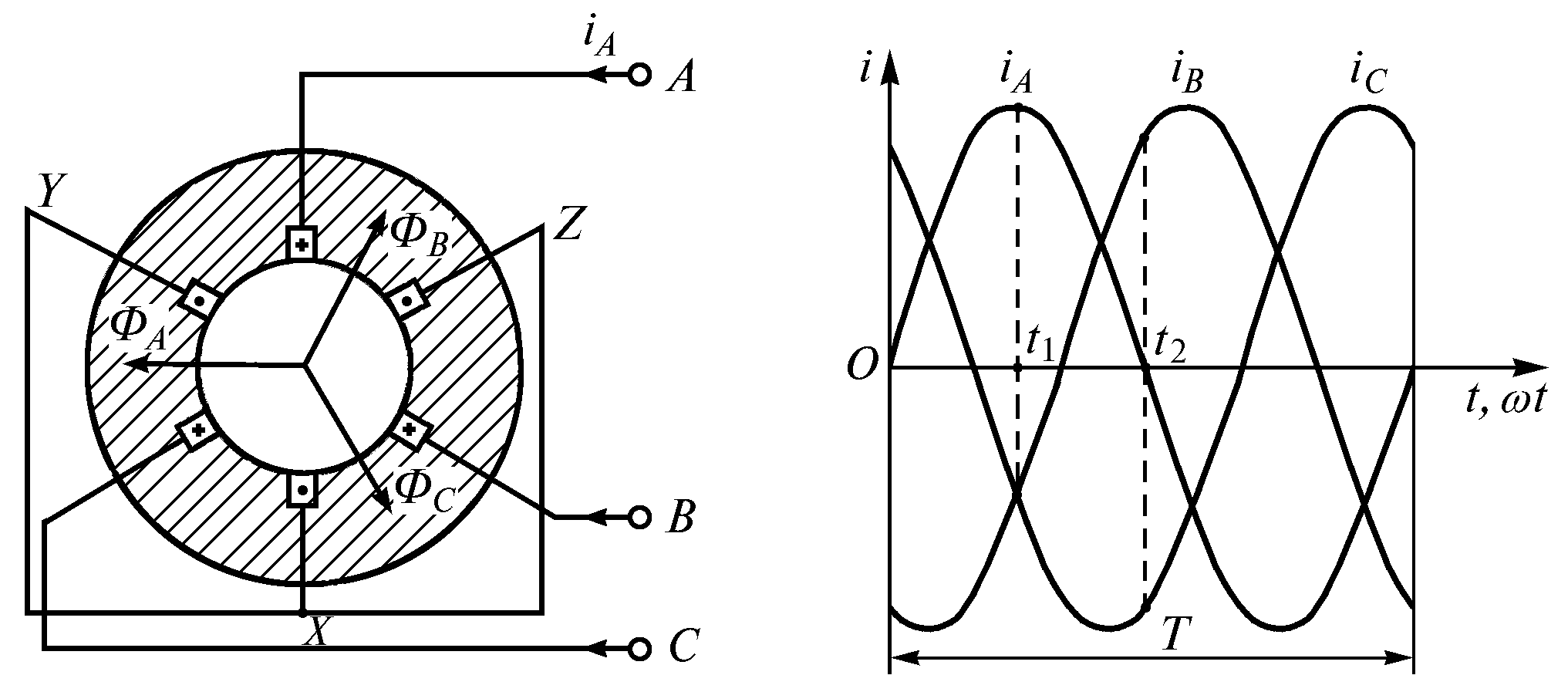 Considerare di ottenere un campo rotante in un motore trifase. Sulla fig. 1 mostra gli avvolgimenti trifase UN–
X,
B
– Y,
C
– Z, ciascuno sotto forma di una singola bobina. Un sistema trifase di correnti viene fornito dalla fonte di alimentazione agli avvolgimenti
Considerare di ottenere un campo rotante in un motore trifase. Sulla fig. 1 mostra gli avvolgimenti trifase UN–
X,
B
– Y,
C
– Z, ciascuno sotto forma di una singola bobina. Un sistema trifase di correnti viene fornito dalla fonte di alimentazione agli avvolgimenti  ;
;![]() ;
; .
.
Se le fasi dell'avvolgimento dello statore sono collegate a una corrente di rete trifase, si creano correnti che creano un campo magnetico con induzione:  ;
; ;. La componente dell'induzione di campo lungo l'asse X è uguale alla somma algebrica delle proiezioni su tale asse dei valori istantanei delle induzioni delle singole fasi, cioè
;. La componente dell'induzione di campo lungo l'asse X è uguale alla somma algebrica delle proiezioni su tale asse dei valori istantanei delle induzioni delle singole fasi, cioè
 . Allo stesso modo, troviamo la proiezione sull'asse Y.
. Allo stesso modo, troviamo la proiezione sull'asse Y.  . Di conseguenza, l'induzione magnetica del campo dello statore è pari a:
. Di conseguenza, l'induzione magnetica del campo dello statore è pari a:
L'induzione del campo magnetico è costante e il campo dello statore stesso ha proiezioni rispettivamente sugli assi X e Y: 
L'induzione V o del campo di taglio si trova ad un angolo rispetto all'asse y 
 ,
,
 , dove T è il periodo di variazione corrente,
, dove T è il periodo di variazione corrente,  - frequenza ciclica
- frequenza ciclica
In questo modo, avvolgimento trifase, alimentato da correnti spostate di 120°, crea un campo magnetico rotante. La portata risultante rimane invariata ed è pari a 1,5 della portata massima della fase. La direzione di questo flusso coincide sempre con la direzione del flusso magnetico della fase in cui la corrente è massima in un dato momento. Pertanto, per cambiare il senso di rotazione, è necessario scambiare due fasi qualsiasi.
Gli esempi considerati si riferiscono a un progetto di avvolgimento bipolare () a una frequenza di rotazione del campo. Nel caso generale, la frequenza di rotazione del campo, dove è il numero di coppie di poli della macchina, è la frequenza della corrente dello statore.
Valore o  chiamato scorrevole macchina asincrona, dove
chiamato scorrevole macchina asincrona, dove  - frequenza di rotazione del campo statorico,
- frequenza di rotazione del campo statorico,  - frequenza di rotazione del rotore.
- frequenza di rotazione del rotore.
A seconda del rapporto e ci sono tre modalità di funzionamento: in modalità motore; in modalità generatore; in modalità freno elettromagnetico.
Lavora in modalità motore. Le forze elettromagnetiche dell'interazione dei campi magnetici dello statore e del rotore creano una coppia nella direzione di rotazione del campo dello statore. La velocità di rotazione del motore dipende dal suo carico. Al minimo, la velocità diventa quasi uguale, poiché a = 0 l'EMF e le correnti nel rotore sono zero e l'interazione elettromagnetica scompare. Pertanto, la macchina asincrona funziona in modalità motore nell'intervallo da = 0 a, cioè quando si scorre da +1 a 0. In questo caso, l'energia elettrica fornita allo statore dalla rete viene convertita in energia meccanica sull'albero.
Lavora in modalità generatore. Assumiamo che lo statore collegato alla rete crei un campo magnetico rotante e che il rotore sia guidato nella stessa direzione con una velocità. In questo caso, lo scorrimento sarà negativo e le correnti EMF e rotore cambieranno direzione rispetto al funzionamento in modalità motore. La coppia sull'albero diventa frenante in relazione alla coppia del motore primo. Una macchina asincrona funziona come un generatore. L'energia meccanica fornita al pozzo viene convertita in energia elettrica e trasferita alla rete. Pertanto, una macchina asincrona può funzionare in modalità generatore in parallelo con la rete entro i limiti dell'otdo, ovvero quando scivola via  prima.
prima.
Lavorare in modalità freno elettromagnetico. Assumiamo che il rotore sia azionato contro il senso di rotazione del flusso magnetico dello statore. In questo caso, l'energia viene fornita alla macchina asincrona da due lati: elettrica dalla rete e meccanica dal motore primo. Questa modalità di funzionamento è chiamata modalità di freno elettromagnetico. Si verifica quando si scorre da a.
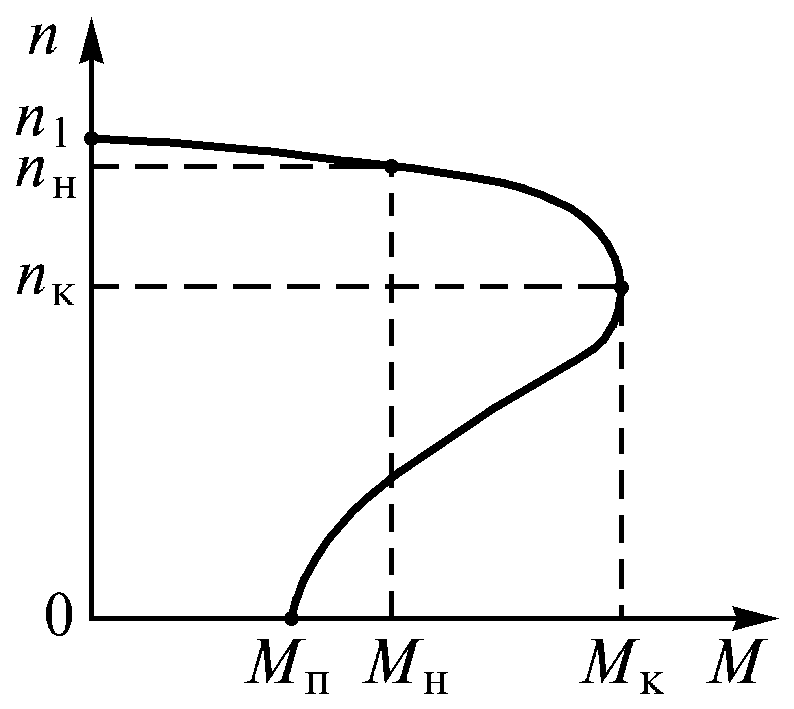
 - coppia massima
- coppia massima
 - Coppia di spunto
- Coppia di spunto
 - momento nominale
- momento nominale
La caratteristica meccanica del motore è la dipendenza della velocità del rotore dalla coppia sull'albero. Poiché il momento inattivo è piccolo sotto carico, la caratteristica meccanica è rappresentata da una dipendenza. Se prendiamo in considerazione la relazione, allora caratteristica meccanica può essere ottenuto presentando la sua dipendenza grafica in coordinate
Una macchina asincrona ha uno statore e un rotore separati da un traferro. Le sue parti attive sono avvolgimenti e un circuito magnetico (nucleo); tutte le altre parti sono strutturali, fornendo la necessaria resistenza, rigidità, raffreddamento, possibilità di rotazione, ecc.
L'avvolgimento dello statore è un avvolgimento trifase (in generale multifase), i cui conduttori sono distribuiti uniformemente attorno alla circonferenza dello statore e posati fase per fase in scanalature con una distanza angolare di 120 °. Le fasi dell'avvolgimento dello statore sono collegate secondo schemi standard "triangolo" o "stella" e collegate a una rete di corrente trifase. Il circuito magnetico dello statore viene rimagnetizzato nel processo di modifica della corrente nell'avvolgimento dello statore, quindi viene reclutato da piastre elettriche in acciaio per garantire perdite magnetiche minime. Il metodo principale per assemblare il circuito magnetico in un pacchetto è la miscelazione.
Secondo il design del rotore, le macchine asincrone sono divise in due tipi principali: con cortocircuitato rotore e fase rotore. Entrambi i tipi hanno lo stesso design dello statore e differiscono solo per il design dell'avvolgimento del rotore. Il circuito magnetico del rotore è realizzato in modo simile al circuito magnetico dello statore - da piastre di acciaio elettrico.
macchina asincrona- una macchina elettrica a corrente alternata, la cui velocità del rotore non è uguale (nella modalità motore inferiore) alla frequenza di rotazione del campo magnetico creato dalla corrente dell'avvolgimento dello statore.
In un certo numero di paesi, le macchine a collettore sono anche classificate come macchine asincrone. Un altro nome per le macchine asincrone è induzione a causa del fatto che la corrente nell'avvolgimento del rotore è indotta dal campo rotante dello statore. Le macchine asincrone oggi costituiscono la maggior parte delle macchine elettriche. Sono utilizzati principalmente come motori elettrici e sono i principali convertitori di energia elettrica in energia meccanica, e sono principalmente utilizzati motori asincroni con rotore a gabbia di scoiattolo (ADKZ).
Vantaggi (per ADKZ):
- Facilità di fabbricazione.
- Economicità relativa.
- Elevata affidabilità operativa.
- Bassi costi operativi.
- Possibilità di connessione alla rete senza alcun convertitore (per carichi che non necessitano di controllo della velocità).
Tutti i suddetti vantaggi sono una conseguenza dell'assenza di commutatori meccanici nel circuito del rotore e hanno portato al fatto che la maggior parte dei motori elettrici utilizzati nell'industria sono macchine asincrone, eseguite da ADKZ.
Screpolatura:
- Piccolo momento di partenza.
- Corrente di spunto significativa.
- Basso fattore di potenza.
- La complessità del controllo della velocità con la precisione richiesta.
- La velocità massima del motore è limitata dalla frequenza di rete (per ADKZ alimentato direttamente da rete trifase 50 Hz è 3000 giri/min).
- Forte dipendenza (quadratica) della coppia elettromagnetica dalla tensione di alimentazione (quando la tensione cambia di 2 volte, la coppia cambia di 4 volte; nei DCT, la coppia dipende al primo grado dalla tensione di alimentazione dell'indotto, il che è più favorevole) .
L'approccio più perfetto per eliminare gli svantaggi di cui sopra è alimentare il motore attraverso un convertitore di frequenza, in cui il controllo viene eseguito secondo algoritmi complessi.
Ti consigliamo di leggere
 Caratteristiche psicologiche dei bambini in adolescenza
Caratteristiche psicologiche dei bambini in adolescenza Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola
Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa

