Järjestelmän luokitus automaattinen säätö
Automaattiset ohjausjärjestelmät käytössä moderni teknologia, ovat melko erilaisia. Nopea laajeneminen toiminnallinen tarkoitus automaattisten järjestelmien toiminnallinen tarkoitus, joka tuli mahdolliseksi erityisesti tietotekniikan käyttöönoton ansiosta, lisää toteutuneiden järjestelmäluokkien määrää. Näissä olosuhteissa on lähes mahdotonta antaa täydellistä yksityiskohtaista automaattisten ohjausjärjestelmien luokittelua. Viime aikoina menestyksekkäästi sovelletut luokitukset ovat nyt tulossa liian suppeiksi, eivätkä ne kata uusia kehitteillä ja käyttöönotettavia järjestelmiä.
Kaikki luokitukset perustuvat tiettyihin luokitteluominaisuuksiin. Automaattisten ohjausjärjestelmien luokituksen yleisyyden kannalta kätevin luokitteluominaisuus on säätelykohteen tiedot. On huomattava, että lähes kaikki automaattiset järjestelmät ovat epälineaarisia laitteita, jotka sisältävät sekä muuttujia että hajautettuja parametreja, joissa muuttujien arvo tietyllä hetkellä voi riippua paitsi nykyisestä, myös aiemmista arvoista. nämä muuttujat.
Jokaiselle automaattiselle järjestelmälle on ominaista toimiva algoritmi - joukko määräyksiä, jotka määrittävät ohjatun muuttujan muutoksen luonteen vaikutuksesta riippuen
Ajovaikutuksen osien muutoksen luonteesta riippuen automaattiset järjestelmät jaetaan neljään luokkaan:
- automaattiset stabilointijärjestelmät, joissa päätoiminto on vakioarvo, ja ohjattu arvo pysyy automaattisesti muuttumattomana kuormituksen ja ulkoisten olosuhteiden mielivaltaisen muutoksen myötä. Säädeltävän kohteen kuormitus (moottorin akselin kuormitusmomentti, generaattorin kuorma) stabilointijärjestelmissä on yleensä tärkein häiritsevä vaikutus, joka vaikuttaa jyrkimmin ohjattuun arvoon;
- ohjelmoidun säädön järjestelmät, joissa liikkeellepaneva voima ja säädelty arvo muuttuvat ennalta määrätyn lain mukaan. Ohjelmistoautomaattijärjestelmää voidaan pitää stabilointijärjestelmänä, jossa stabilointitehtävää monimutkaistaa tehtävä muuttaa ohjattua muuttujaa tietyn ohjelman mukaan. Ohjatun arvon muuttaminen ohjelman mukaan saadaan aikaan lisäämällä järjestelmään jokin ohjelmistolaitteen elementti, joka muuttaa asetustoimintoa ajassa ennalta määrätyn lain mukaan;
- Servojärjestelmissä muutetaan ohjattua muuttujaa käyttövoiman muutoksen mukaisesti, jonka muutoslaki on tuntematon funktio. Siten servojärjestelmä, kuten ohjelmistojärjestelmä, toistaa päätoiminnon. Tämä vaikutus seurantajärjestelmässä ei kuitenkaan muutu ennalta määrätyn ohjelman mukaan, vaan mielivaltaisesti. Esimerkiksi tutka-antenni kääntyy seuraamaan lentokonetta, jonka lentorataa ei tiedetä etukäteen, eli "seuraa" sitä. Tästä nimiseurantajärjestelmä tulee. Servojärjestelmien päävaikutteet ja ohjatut arvot voivat olla luonteeltaan erilaisia. Lisäksi ohjattu arvo voi fysikaalisen luonteensa vuoksi poiketa asetustoiminnosta.
-
optimaaliset ohjausjärjestelmät takaavat säädetyn arvon optimaalisen ylläpidon yhden tai toisen optimaalisuuskriteerin mukaan
Riippuen siitä, mikä matemaattinen malli kuvaa automaattisten järjestelmien prosesseja, ne jaetaan:
- lineaariset automaattiset järjestelmät, joiden matemaattinen malli koostuu lineaarisista tai linearisoiduista differentiaaliyhtälöistä. Jos lineaarisen automaattisen järjestelmän minkä tahansa linkin dynamiikan yhtälössä on vähintään yksi tai useampi aikamuuttujakerroin, saadaan lineaarinen automaattinen järjestelmä muuttuvilla parametreilla. Jos jokin linkki on kuvattu lineaarisilla osittaisdifferentiaaliyhtälöillä, niin automaattinen järjestelmä on lineaarinen automaattinen järjestelmä hajautetuilla parametreilla. Sitä vastoin tavallinen lineaarinen automaattijärjestelmä on niputettu-parametrinen automaattijärjestelmä. Jos automaattisen järjestelmän minkä tahansa linkin dynamiikkaa kuvataan lineaarinen yhtälö jossa on viivästetty argumentti, niin automaattista järjestelmää kutsutaan lineaariseksi automaattiseksi järjestelmäksi viiveellä;
- epälineaariset automaattiset järjestelmät, joiden matemaattinen malli koostuu epälineaarisista differentiaaliyhtälöt. Epälineaariset automaattiset järjestelmät sisältävät kaikki automaattiset järjestelmät, joiden linkeissä on minkä tahansa monista epälineaarisuuden tyypeistä staattisia ominaisuuksia. Epälineaariset voivat olla automaattisia järjestelmiä muuttuvilla parametreilla, hajautetuilla parametreillä, viive-, impulssi- ja digitaaliautomaatiojärjestelmillä, jos dynamiikkayhtälön lineaarisuus rikkoutuu jossain niissä.
Automaattisten ohjausjärjestelmien luokittelu
Jokainen automaattinen järjestelmä koostuu useista linkeistä, jotka on kytketty toisiinsa sopivalla tavalla. Jokaisella yksittäisellä linkillä on tulo ja tulos, jotka määrittävät vaikutuksen ja tiedon siirron linkistä toiseen. AT yleinen tapaus missä tahansa linkissä voi olla useita tuloja ja lähtöjä. Syöttö- ja lähtömäärät voivat olla luonteeltaan mitä tahansa fyysisiä.
Automaattisen järjestelmän toiminnan aikana tulo- ja lähtöarvot muuttuvat ajan myötä. Tämän linkin signaalin muunnosprosessin dynamiikkaa kuvaa jokin yhtälö, joka yhdistää lähtömuuttujan tulomuuttujaan. Kaikkien linkkien yhtälöt ja ominaisuudet kuvaavat ohjaus- tai säätöprosessien dynamiikkaa koko järjestelmässä.
Automaattisten järjestelmien jaon pääpiirteet suuriin luokkiin sisäisten dynaamisten prosessien luonteen mukaan ovat seuraavat:
- dynaamisten prosessien jatkuvuus tai diskreetti ajassa;
- ohjausprosessien dynamiikkaa kuvaavien yhtälöiden lineaarisuus tai epälineaarisuus.
Ohjaussignaalien muutoksen luonteesta riippuen automaattiset järjestelmät jaetaan kolmeen luokkaan:
- jatkuvat (analogiset) järjestelmät, joita kuvataan tavallisilla differentiaaliyhtälöillä ja säätöprosessissa järjestelmän kaikkien yhteyksien rakenne pysyy muuttumattomana. Tällaisen järjestelmän yksittäisten linkkien lähdössä olevat signaalit ovat jatkuvia vaikutusten ja ajan toimintoja. Automaattijärjestelmän tulon ja lähdön linkkien välillä on jatkuva toiminnallinen yhteys. Tässä tapauksessa lähtöarvon muutoksen laki ajassa voi olla mielivaltainen riippuen tuloarvon muutoksen muodosta ja linkin dynamiikan yhtälön muodosta. Jotta automaattinen järjestelmä kokonaisuutena olisi jatkuva, on ensinnäkin välttämätöntä, että kaikkien linkkien staattiset ominaisuudet ovat jatkuvia;
- diskreetit (digitaaliset) järjestelmät, joita kuvataan differentiaali-eroyhtälöillä ja joissa ohjaustoimintapiiri avataan tai sulkeutuu diskreetin aikavälein. Erillisissä järjestelmissä toimintapiirin avaaminen suoritetaan väkisin ja määräajoin erityisillä katkaisulaitteilla. Tällaiset järjestelmät sisältävät impulssielementtejä ja suorittavat signaalin kvantisoinnin sekä tason että ajan suhteen. Linkkiä, joka muuntaa jatkuvan tulosignaalin pulssisarjaksi, kutsutaan pulssilinkiksi. Jos automaattisen järjestelmän myöhempi linkki on myös diskreetti, niin sille ei vain lähtö, vaan myös tuloarvo on diskreetti. Erillisiin automaattijärjestelmiin kuuluvat automaattiset impulssiohjausjärjestelmät sekä ohjaustietokoneiden automaattiset järjestelmät. Nämä jälkimmäiset antavat laskennan tuloksen lähdössä diskreetti, tietyin väliajoin, numeroiden muodossa yksittäisille erillisille lähtömäärän numeerisille arvoille;
- relejärjestelmät (diskreetti-jatkuvat), jotka kuvataan molemmilla yhtälöillä. Näissä järjestelmissä toimintapiirin avaamisen tai sulkemisen suorittaa yksi järjestelmän linkeistä jatkuvalla tulotoiminnolla. Avaaminen tai sulkeminen tapahtuu releen tai linkin avulla, jossa on releominaisuus. Rele laukeaa tietyillä vaikutuksilla sen herkälle elimelle. Relejärjestelmät suorittavat signaalien kvantisoinnin ajoissa. Relelinkin staattisella ominaisuudella on katkeamispisteet.
Jokainen näistä kolmesta automaattisten järjestelmien luokasta on jaettu alaluokkiin:
- Kiinteät automaattiset järjestelmät, joissa on niputetut tai hajautetut parametrit;
- ei-kiinteät automaattiset järjestelmät, joissa parametrit on niputettu tai hajautettu.
Automaattisten järjestelmien tutkimuksessa, laskennassa ja synteesissä on pidettävä mielessä, että teoria ja erilaiset sovelletut menetelmät tavallisiin lineaarisiin automaattijärjestelmiin ovat kehittyneimmillään. Siksi laskennan yksinkertaisuuden vuoksi on aina toivottavaa pelkistää ongelma sellaiseen muotoon, että tavallisten lineaaristen automaattisten järjestelmien tutkimusmenetelmiä voidaan hyödyntää mahdollisimman paljon. Yleensä automaattisen järjestelmän kaikkien linkkien dynamiikkayhtälöt yritetään pelkistää tavallisiksi lineaarisiksi, ja vain joidenkin linkkien kohdalla, joissa tämä ei ole hyväksyttävää tai joissa on erityisesti otettu käyttöön erityinen lineaarinen tai epälineaarinen linkki, nämä erikoisominaisuudet. otetaan huomioon.
Tämä ei kuitenkaan suinkaan tarkoita sitä, että uusia automaattijärjestelmiä suunniteltaessa pitäisi pyrkiä tavallisiin lineaarisiin automaattijärjestelmiin. Päinvastoin, on aivan ilmeistä, että tavallisilla lineaarisilla automaattisilla järjestelmillä on rajalliset ominaisuudet. Erityisten lineaaristen ja epälineaaristen linkkien käyttöönotto voi antaa automaattisen järjestelmän parhaat ominaisuudet. Erityisen runsaasti mahdollisuuksia on automaattisilla järjestelmillä, joissa on erityisesti käyttöönotettu epälineaarisuus ja diskreetit automaattiset järjestelmät, mukaan lukien ohjaustietokoneet ja mikroprosessoripohjaiset automaattiset järjestelmät.
Signaalien tyypin ja lukumäärän mukaan automaattiset ohjausjärjestelmät jaetaan:
- yksipiiriset järjestelmät, joissa on yksi säädettävä arvo;
- monipiirijärjestelmät, joissa on useita pää- tai paikallisia takaisinkytkentöjä;
- Epäkoherentin säätelyn järjestelmät on tarkoitettu erilaisten suureiden säätelyyn, eivät ole yhteydessä toisiinsa ja voivat olla vuorovaikutuksessa vain yhteisen säätökohteen kautta.
a) Epäkoherentin ohjauksen riippuvaisissa järjestelmissä muutos yhdessä säädetyistä muuttujista vaikuttaa muiden muutokseen. Siksi tällaisissa järjestelmissä säätelyprosesseja ei voida tarkastella erillään toisistaan;
b) riippumattomissa epäkoherentin ohjauksen järjestelmissä yhden säädetyn arvon muutos ei riipu muiden muutoksesta;
- yhdistetyt säätöjärjestelmät olettavat useiden säätimien läsnäolon, joiden säännellyillä arvoilla on keskinäiset yhteydet toisiinsa ja jotka suoritetaan säätökohteen lisäksi.
Riippuen säätövirheen olemassaolosta tai puuttumisesta, ATS jaetaan:
- Staattiset järjestelmät ovat sellaisia järjestelmiä, joissa oletetaan jatkuvan ohjausvirheen (droopin) olemassaolo. ominaispiirre työ staattinen järjestelmä on, että järjestelmän tasapaino voidaan saavuttaa, kun erilaisia arvoja säännelty määrä ja jokainen säännellyn määrän arvo vastaa yhtä sääntelyelimen arvoa;
- Astaattiset järjestelmät ovat sellaisia järjestelmiä, joissa ulkoisen vaikutuksen erilaisille arvoille kohteeseen ei ole säädetyn arvon poikkeamaa vaaditusta arvosta. Tällaisissa järjestelmissä tasapainotila tapahtuu yhdellä säädetyn muuttujan arvolla, joka on yhtä suuri kuin annettu, ja säätelyelimen on voitava olla eri paikoissa samalla säädettävän muuttujan arvolla.
Automaattisen ohjauksen periaatteet
Minkä tahansa automaattisen ohjausjärjestelmän toimintaperiaate on havaita säädellyn kohteen toimintaa tai prosessin kulkua luonnehtivien ohjattujen arvojen poikkeamat vaaditusta tilasta ja samalla vaikuttaa säädeltyyn kohteeseen tai prosessiin. tavalla, joka poistaa nämä poikkeamat.
Hallintoprosessissa on aina fyysisiä määriä joita on muutettava tiukasti määritellyllä tavalla.
Automaattisten ohjausjärjestelmien tulee, perustuen säänneltyjen arvojen mittaukseen, muodostaa ohjaustoimenpiteitä säädellylle kohteelle. Säädeltävän kohteen käyttäytymisen muuttaminen voidaan suorittaa avoimen tai suljetun syklin periaatteiden mukaisesti.
Avoimessa automaattijärjestelmässä ohjaustoiminto muodostetaan määritellyn arvon arvon perusteella. Tällaisissa järjestelmissä tulon ja lähdön välillä ei ole yhteyttä. Seurauksena on, että avoimissa järjestelmissä ohjausprosessin sujuvuus ei riipu tuloksista, eli siitä, kuinka järjestelmä suorittaa tehtävänsä. Avoimessa automaattijärjestelmässä tapahtuu vain suoraa toimintaa: operaattorilta säädellylle kohteelle, tulosta lähtöön. Yksinkertaisin esimerkki- huoneen sähkövalaistuksen kytkeminen päälle.
Jotta säädellyn kohteen säädelty arvo y(t) saisi vaaditun arvon, sen syötteeseen sovelletaan syöttötoimintoa x(t). Käytännössä säädellyn kohteen ohjattu arvo y(t) poikkeaa kuitenkin vaaditusta arvosta useista syistä. Yksi näistä syistä on erilaisten ulkoisten häiritsevien vaikutusten f(t) vaikutus säätelyyn. Toinen syy on säädeltävän kohteen tai järjestelmän muiden elementtien parametrien muutoksen vaikutus eli parametristen häiriöiden vaikutus (vahvistustekijät, aikavakiot jne.). Kolmas syy säädetyn muuttujan poikkeamaan johtuu säädettävän muuttujan vaaditun arvon muutoksesta (muutos karkaisuuunin vaaditussa lämpötilassa, mielivaltainen muutos kohteen kulmakoordinaateissa). Jos säädetyn muuttujan vaadittu arvo muuttuu, niin sen todellisen arvon vastaavaa muutosta varten on tarpeen muuttaa ohjaustoimintoa h(t) säädettävän kohteen sisääntulossa. Kun ohjaustoiminto muuttuu ohjausobjektin sisääntulossa, jossa on inertia, tapahtuu ohimenevä prosessi, jonka aikana ohjattu arvo ei vastaa vaadittua arvoa.
Säädetyn arvon poikkeama vaaditusta arvosta voi tapahtua paitsi transientissa, myös tasaisesti dynaamisessa tilassa, kun vaadittu arvo muuttuu esimerkiksi vakionopeudella tai vakiokiihtyvyydellä. Ohjatun arvon poikkeama lueteltujen syiden vaikutuksesta voi saavuttaa liian suuria arvoja, joissa kohteen tarjoamaa teknistä prosessia rikotaan. Siksi syntyy ongelma vähentää esineiden lähtöarvojen poikkeamia vaadituista arvoista. Tämä tehtävä on johtamisen (sääntelyn) päätehtävä.
On selvää, että ohjaustoimenpiteen tarve syntyy niissä tapauksissa, joissa prosessi säätelykohteessa poikkeaa toiminta-algoritmin antamista ohjeista.
Ohjausalgoritmi tällaisissa automaattisissa järjestelmissä määräytyy yksittäisten linkkien ominaisuuksien tai tulosignaalien luonteen mukaan. Monet automaattiset järjestelmät toimivat avoimen silmukan ohjauksen periaatteella, joilla on ennalta määrätty toimintoalgoritmi. Esimerkiksi polttomoottorin käynnistäminen, veturin kompressorin käynnistäminen, hiekan syöttäminen alle pyöräkertoja, akun latausprosessi jne. Tällaisten automaattisten järjestelmien normaalin toiminnan varmistamiseksi on noudatettava useita toimenpiteitä.
Tässä järjestelmässä ohjaustoiminnon voi generoida henkilö. Vertaamalla säädettävän muuttujan todellista ja vaadittua arvoa, henkilö voi tunnistaa niiden välisen poikkeaman, ja tämän poikkeaman suuruuden ja merkin mukaan ohjaustoimenpiteen suuruus määritetään.
Ensinnäkin säädetyn muuttujan asetettujen ja todellisten arvojen täydellinen vastaavuus voi tapahtua vain, jos automaattisen järjestelmän yksittäisten linkkien ominaisuudet ovat vakaat ja ulkoisten häiriöiden vaikutus suljetaan pois.
Toiseksi ne on viritettävä huolellisesti, eli jokaisen ohjauslaitteen asennon on vastattava tarkasti säädettävän muuttujan arvoa. Asetusten tallentaminen kuitenkin, kun osat ovat kuluneet tai elementit vanhenevat, sekä lämpötilan muuttuessa ympäristöön esittää vaikean tehtävän. Siksi avoimen silmukan järjestelmät eivät voi tarjota suurta ohjaustarkkuutta. He eivät mittaa ohjaustoimenpiteen aiheuttamaa tulosta eivätkä tee toimenpiteitä, jotka vaikuttavat tähän tulokseen niin, että se vastaa haluttua tulosta.
Suljetuissa automaattijärjestelmissä ohjattua arvoa verrataan asetettuun arvoon ja virhesignaalin perusteella muodostetaan ohjaustoiminto. Automaattisen ohjausprosessin eteneminen riippuu tämän vertailun tuloksista.
Tällaisen ohjausalgoritmin toteuttamiseksi automaattisen järjestelmän suunnitteluun tuodaan yhteys, jota kutsutaan takaisinkytkennän, koska se välittää signaalin säädettävän kohteen lähdöstä automaattisen järjestelmän tuloon suuntaan vastakkaiseen suuntaan. ohjaustoiminnon siirtämisestä säänneltyyn kohteeseen.
Helpoin tapa on istuttaa ihmisoperaattori, joka toimii palautteena esimerkiksi manuaalisen ohjauksen prosessissa ajoneuvoa oli se sitten auto, traktori, veturi, lentokone tai avaruusalus. Tässä tapauksessa lukemien vertailu ohjauslaitteet, mittaamalla säädettävän muuttujan (nopeus, teho, työntövoima, lentokorkeus jne.) todellista arvoa, käyttäjä tekee annetulla arvollaan lisävaikutuksen ohjattavaan kohteeseen saavuttaakseen ohjatun muuttujan vähimmäispoikkeaman asetetusta arvosta.
|

Toisaalta ihmisen operaattorin toimet ovat alkeellisen yksinkertaisia, ja toisaalta monien laitteiden valvonta on melko työlästä, ja se voidaan suorittaa helposti erityisellä automaattilaitteella, joka vertaa ohjattavan asetuspistettä ja todellista arvoa. muuttuja ja sen perusteella muodostaa säädellylle objektille ohjaustoiminnon. Siten ilmestyivät ensimmäiset automaattiset säätimet, jotka on suunniteltu korvaamaan ihmisen yksitoikkoinen ja tehoton työ automaattinen laite. Tällainen laite on automaattinen säädin.
Säätökohde ja automaattinen säädin muodostavat suljetun järjestelmän.
Suljetuissa automaattisissa järjestelmissä ihmisen operaattorin toimet rajoittuvat tietyn tilan alkuasetukseen ja automaattisen järjestelmän prosessien yleiseen seurantaan. Sääntelyn tarkkuus suljetuissa automaattisissa järjestelmissä eli vaaditun toiminnallisen suhteen ylläpitämisen tarkkuus tulon ja lähdön välillä riippuu pääasiassa siitä, millä tarkkuudella ohjattavan muuttujan vaaditun ja todellisen arvon vertailu tehdään.
Suljetun silmukan automaattiset ohjausjärjestelmät eroavat säätöperiaatteesta:
- poikkeamalla;
- suuttumuksesta;
- yhdistetty.
Automaattiset ohjausjärjestelmät, jotka perustuvat poikkeamaperiaatteeseen, ovat tärkeimmät eri tuotantolaitosten automatisoinnin käytännössä. Niille on ominaista takaisinkytkentä, joka syöttää osan lähtösignaalista automaattisen järjestelmän tuloon ja muodostaa suljetun ohjaussilmukan. Tämän ohjausperiaatteen ydin on, että säädettävän muuttujan todellista arvoa verrataan jatkuvasti sen arvoon. h annettu arvo. Jos näiden arvojen välillä on ero ennalta määrätyn kynnyksen yläpuolella, järjestelmä kehittää sääntelytoimenpiteen, jonka tarkoituksena on poistaa tämä ero tai pienentää se tiettyyn hyväksyttävään arvoon.
|

Automaattijärjestelmän säädetyn arvon y(t) vaadittu arvo määräytyy käyttölaitteesta tulevan käyttövoiman x(t) perusteella. Säädetyn arvon y(t) poikkeama asetetusta arvosta voi johtua sekä erilaisten häiritsevien vaikutusten vaikutuksesta että asetustoiminnon x(t) muutoksesta. Tämän poikkeaman vähentämiseksi tai poistamiseksi on tarpeen kehittää sopiva ohjaustoiminto h(t) ja soveltaa sitä ohjausobjektin syötteeseen. Ohjaustoiminto käytettäessä poikkeaman säätöperiaatetta syntyy muuntamalla ohjatun muuttujan poikkeama Dx(t) asetetusta arvosta.
Poikkeaman periaatteella toimivissa automaattisissa järjestelmissä ohjaustoiminta h(t) saadaan poikkeamasignaalin muunnoksen tuloksena, ei itse poikkeaman aiheuttanut tekijä, esimerkiksi häiriötoiminto f(t) (eli seurauksen muuntumisen seurauksena, ei itse syyn seurauksena), joten sillä ei voi olla viipymättä käänteistä vaikutusta kohteeseen verrattuna häiritsevään vaikutukseen. Tästä johtuen poikkeaman hallinnan periaate ei mahdollista poikkeaman eliminoimista kokonaan, ts. absoluuttisen invarianssin saavuttamista.
Poikkeaman periaatteella toimivissa automaattisissa järjestelmissä ohjaustoiminta saadaan aikaan poikkeaman muutoksen seurauksena, joka voi johtua eri tekijöistä. Siksi näissä järjestelmissä poikkeama pienenee riippumatta siitä, mistä tekijöistä se johtuu. Koska poikkeamaperiaatteella toimivissa automaattisissa järjestelmissä myös automaattisen järjestelmän elementtien parametrien muuttuessa ilmenevät poikkeamat pienenevät, niin suljetut automaattiset järjestelmät ovat vähemmän herkkiä elementtien parametrien muutoksille verrattuna avoimiin automaattijärjestelmiin. , jossa niiden elementtien parametrien muutoksista aiheutuvia poikkeamia ei kompensoida.
Tämän periaatteen mukaisesti toimivilla automaattisilla järjestelmillä on suuri tarkkuus säädetyn arvon ylläpitämisessä (johtuen asetettujen ja todellisten arvojen välisen eron jatkuvasta säädöstä), mutta alhainen nopeus.
Tällaisten järjestelmien alhainen suorituskyky johtuu siitä, että
1. Automaattisen säätimen ja takaisinkytkennän luoma automaattisen ohjauksen suljettu silmukka sisältää säätökohteen. Käytännössä säätökohde on lähes aina automaattisen järjestelmän inertiaisin lenkki;
2. Ne eivät reagoi syyyn, joka aiheuttaa ohjearvon ja säädettävän muuttujan todellisen arvon epäsopivuuden, vaan seuraukseen - ohjearvon ja säädettävän muuttujan todellisen arvon epäsuhtaisuuteen.
Poikkeaman periaatteella toimivan automaattisen ohjausjärjestelmän rakentaminen muiden tekijöiden muuttuessa edellyttää vähimmäismäärää alkutietoa säätelyn kohteesta. Lähes kaikki säätelykohteen tiedot välittyvät palautteen kautta. Palautteen olemassaololle on ominaista se, että jonkin vaikutuksen kohdistaminen automaattiseen järjestelmään johtaa vastatoimeen, joka palauttaa koko automaattisen järjestelmän tilan.
Yksinkertaisimmassa tapauksessa automaattinen säädin vertaa automaattisen järjestelmän lähtösignaalia referenssisignaaliin selvittääkseen, kuinka oikein automaattijärjestelmä suorittaa tehtävänsä. Palautteen läsnäolo automaattisessa järjestelmässä muuttaa sen staattisia ja dynaamisia ominaisuuksia. Palautteen ansiosta automaattinen järjestelmä voi olla tarkempi ja nopeampi tai päinvastoin hitaampi. Se voi tehdä automaattisesta järjestelmästä vakaan tai epävakaan.
Poikkeaman periaatteella toimivilla järjestelmillä on seuraavat edut:
1) pienentää säädettävän muuttujan poikkeamaa vaaditusta arvosta riippumatta siitä, mitkä tekijät (ulkoiset häiriövaikutukset, järjestelmän elementtien parametrien muutokset, asetustoiminnon muutokset) aiheuttivat sen;
2) ovat vähemmän herkkiä järjestelmän elementtien parametrien muutoksille avoimiin järjestelmiin verrattuna.
Poikkeaman periaatteella toimivilla järjestelmillä on seuraavat haitat:
1) yksinkertaisissa yksisilmukaisissa järjestelmissä, joissa on poikkeaman ohjauksen periaate, absoluuttista invarianssia ei voida saavuttaa;
2) järjestelmissä, joissa on poikkeaman säätelyn periaate, kuten suljetuissa järjestelmissä, syntyy stabiilisuusongelma.
Poikkeaman säätelyperiaatteella varustetun järjestelmän merkittävien etujen vuoksi niitä käytetään laajalti tekniikassa.
Automaattiset ohjausjärjestelmät toimivat häiriökompensoinnin periaatteella, on suunniteltu vähentämään häiritsevien vaikutusten vaikutusta säänneltyyn kohteeseen mittaamalla nämä vaikutukset ja kompensoimalla niiden vaikutusta, joka johtuu käänteisestä keinotekoisesta vaikutuksesta säänneltyyn kohteeseen.
Tätä periaatetta kehittäessään insinöörit lähtivät olettamuksesta, että ohjatun arvon poikkeaman asetusarvosta pienentämiseksi tai eliminoimiseksi, joka johtuu jonkin tekijän vaikutuksesta, on välttämätöntä, että ohjaustoiminto on tämän tekijän tietty funktio. ja säännellyn kohteen ominaisuudet.
Häiriön kompensointiperiaatteen mukaisesti säädettäessä ongelmana on kompensoida häiriön vaikutus ohjattuun arvoon.
Näissä järjestelmissä toimivat tiedot ovat häiritseviä vaikutuksia, huono vaikutus jotka ovat korvauksen alaisia. Siksi näissä järjestelmissä on mahdollista kompensoida täysin häiritsevän toiminnan vaikutus ohjattuun muuttujaan, ts. on mahdollista saavuttaa säädetyn suuren invarianssi (riippumattomuus) tämän häiritsevän toiminnan suhteen. Tarkasteltavalla menetelmällä voidaan kompensoida kunkin häiritsevän vaikutuksen vaikutus erikseen. Käytännössä kaikkien häiritsevien vaikutusten vaikutusta ei kuitenkaan yleensä pystytä kompensoimaan, koska merkittävää osaa vaikutuksista ei voida mitata, ja kun yritetään kompensoida kaikkia mahdollisia häiritseviä vaikutuksia, saadaan erittäin monimutkainen järjestelmä.
Tällaiset automaattiset järjestelmät vaativat alustavaa tietoa vielä täydellisemmin kuin poikkeamaperiaatteella toimivat automaattiset järjestelmät. Itse asiassa, jotta voidaan kompensoida minkä tahansa häiriön vaikutusta vakaassa tilassa ja vielä enemmän ohimenevissä olosuhteissa, tämä vaikutus on tiedettävä tarkasti.
Tässä tapauksessa valitaan yksi (pää) tai kaksi (ei enempää) häiriötä ja määritetään, kuinka ne vaikuttavat ohjattuun muuttujaan. Toimeenpanevan elimen säätelykohteeseen soveltama ohjaustoiminto riippuu häiriöstä siten, että säädettävän arvon muutokset eivät ylitä määritettyjä rajoja. Tällaiset järjestelmät ovat yksinkertaisia ja stabiileja toiminnassa, mutta ne eivät pysty reagoimaan muihin häiriöihin, jotka aiheuttavat poikkeaman ohjatussa muuttujassa.
|

Häiriökompensoinnin periaate on, että häiriövaikutuksen f(t) aiheuttaman säädetyn arvon poikkeaman Dx(t) asetteluarvosta pienentämiseksi tai eliminoimiseksi mitataan tämä vaikutus ja sen muuntamisen seurauksena generoidaan ohjaustoiminto h(t), joka ohjatun kohteen tuloon kohdistettuna aiheuttaa kompensoivan poikkeaman säädetystä arvosta y(t) päinvastaisesta etumerkistä verrattuna häiritsevän vaikutuksen f(t) aiheuttamaan poikkeamaan. ). Häiriö f(t) mitataan häiriökompensaattorilla. Jotkut automaattiset järjestelmät sisältävät nimenomaisesti toimilaitteita ja säätimiä.
Summaimen häiriön хв(t) signaali lisätään (vähennetään) master-toiminnolla, joka määrittää säädettävän muuttujan vaaditun arvon. Kokonaisvaikutus Dx(t) automaattisen ohjaimen avulla (tälle ohjausperiaatteelle useimmissa tapauksissa automaattinen ohjain on tehovahvistin) vahvistetaan arvoon, joka tarvitaan säädettävän kohteen vaaditun toimintatilan saamiseksi . Tällä tavalla muodostettu ohjaustoiminto h(t) tulee säädettävän kohteen tuloon ja kompensoi häiritsevän toiminnan vaikutuksen.
Häiriön kompensoinnin periaatteella toimiva automaattinen järjestelmä on avoimen silmukan automaattinen järjestelmä. Siinä säätöprosessi ei riipu automaattisen järjestelmän toiminnan tuloksista (ohjattua arvoa ei mitata eikä toimenpiteisiin ryhdytä, jos se ei vastaa vaadittua arvoa) ja havaitaan vain suora vaikutus.
Tämän periaatteen mukaisesti toimivalla automaattisella järjestelmällä on suuri nopeus, mutta alhainen tarkkuus säädetyn arvon ylläpitämisessä. Suuri nopeus varmistetaan sillä, että automaattinen säädin ei reagoi häiritsevän vaikutuksen vaikutuksen vaikutukseen (ohjatun suuren poikkeamaan), vaan syyyn - häiritsevän toiminnan muutokseen valmistaen ohjausobjektin etukäteen ohjatun muuttujan mahdollinen poikkeama.
Häiriön kompensointiperiaatteella toimivilla automaattisilla järjestelmillä on seuraavat edut:
1) mahdollistaa tärkeimpien häiritsevien vaikutusten täydellisen kompensoinnin, eli näissä järjestelmissä on mahdollista saavuttaa ohjatun muuttujan muuttumattomuus häiritsevien vaikutusten suhteen;
2) niissä, kuten kaikissa avoimissa järjestelmissä, ei ole vakausongelmaa.
Häiriön kompensointiperiaatteella toimivilla automaattisilla järjestelmillä on seuraavat haitat:
1) ne eliminoivat vain tärkeimpien häiritsevien vaikutusten vaikutuksen, joille luodaan kompensaatiokanavia;
2) ohjatussa arvossa on poikkeama vaaditusta arvosta toissijaisten häiriövaikutusten muutoksen seurauksena, jolle ei ole kompensointikanavia;
3) näissä järjestelmissä, kuten avoimissa järjestelmissä, ohjatun arvon poikkeamia ilmenee automaattisen järjestelmän kohteen ja elementtien ominaisuuksien muuttuessa;
4) häiriönhallintaperiaatteen soveltaminen rajoittuu esineisiin, joiden ominaisuudet tunnetaan tai jotka voidaan määrittää.
Häiriön kompensointiperiaatteella toimivilla järjestelmillä on erityisiä sovelluksia.
Automaattiset ohjausjärjestelmät toimivat yhdistelmäperiaatteella, yhdistä häiriön kompensointiperiaate ja taipumaperiaate. Tällaiset automaattiset järjestelmät yhdistävät aiemmin käsiteltyjen automaattisen ohjauksen periaatteiden positiiviset puolet ja poistavat niiden puutteet.
|
Tällaisissa järjestelmissä yhdistetty automaattinen järjestelmä sisältää pääsuljetun poikkeaman ohjaussilmukan lisäksi kompensointisilmukan yhdelle tai useammalle häiriölle. Yhdistetyssä automaattijärjestelmässä toimivan tiedon määrä on suurempi kuin aikaisemmissa järjestelmissä. Ohjatun muuttujan poikkeamaa koskevaan toimintatietoon lisätään tässä tiedot häiritsevästä vaikutuksesta.
Yhdistetyissä automaattisissa järjestelmissä poikkeaman säätelyn periaate toteutetaan pääpalautteen avulla ja häiriöohjauksen periaate kompensointilinkkien avulla. Jos merkittävin virhe johtuu häiriötoiminnosta f(t), niin tälle häiriölle muodostetaan yhteys, mutta jos tällainen virhe saadaan ajotoiminnon muutoksesta x(t), niin yhteys asetustoiminto määräytyy automaattisen ohjausalgoritmin mukaan.
Yhdistetyissä automaattisissa järjestelmissä päähäiriön (ajotoiminnan) kompensointiyhteys eliminoi tämän häiriön aiheuttaman virheen komponentin (ajovaikutuksen muuttaminen) ja takaisinkytkentätoiminnan seurauksena toissijaisten häiriövaikutusten aiheuttamat virheet, joille ei ole korvausyhteyksiä, vähennetään. Jos kompensoivien linkkien avulla ei täysin poisteta tärkeimpien häiritsevien (asetus)vaikutusten aiheuttamia virheitä, niin myös jäännösvirheitä vähennetään palautteen avulla.
Ohjaustoiminnon muodostamiseksi yhdistetyissä automaattisissa järjestelmissä käytetään sekä suoria tietoja tärkeimmistä häiritsevistä vaikutuksista (yleistoiminnon muutoksista) että ohjatun muuttujan poikkeamaa vaaditusta arvosta, joka johtuu kaikista häiritsevistä vaikutuksista (muutos päätoiminnossa). . Siten:
1) yhdistetyissä automaattisissa järjestelmissä kompensointilinkkien avulla on mahdollista saavuttaa täydellinen kompensointi tärkeimpien häiritsevien ja päävaikutusten aiheuttamista virheistä (invarianssi on mahdollista saavuttaa);
2) sekä mahdollisuus kompensoida täydellisesti päävaikutuksista aiheutuvat virheet yhdistetyissä automaattisissa järjestelmissä takaisinkytkennän avulla toissijaisten häiritsevien vaikutusten aiheuttamat virheet, joille ei ole kompensoivia yhteyksiä, sekä alikompensoidut virheet tärkeimmät vaikutukset vähenevät;
3) jos häiritsevän toiminnan kompensoinnin ehtoja rikotaan, tuloksena olevaa virhettä pienennetään suljetulla automaattijärjestelmällä, eli yhdistetyt automaattiset järjestelmät ovat vähemmän herkkiä avoimien kanavien parametrien muutoksille kuin avoimet automaattiset järjestelmät;
4) yhdistettyjen automaattisten järjestelmien avoimien kompensointikanavien läsnäolon vuoksi vakausongelma ei ole niin akuutti kuin suljetuissa automaattisissa järjestelmissä.
Luonnollisesti yhdistetyissä järjestelmissä saavutettavissa oleva säätötarkkuus on suurempi kuin kaikkien muiden automaattisten järjestelmien tarkkuus. Käytännössä tällaiset automaattiset järjestelmät ovat monimutkaisia ja kalliita.
Yhdistetyt automaattiset järjestelmät ovat siis edistyksellisimpiä järjestelmiä, joilla on suuri tarkkuus valvotun arvon ylläpitämisessä. Tarkastetuille periaatteille ei rakenneta vain automaattisen ohjauksen teknisiä järjestelmiä, vaan myös yhteiskunnan ohjausjärjestelmiä ja elävien organismien säätelyjärjestelmiä. Siksi tutkimusmenetelmiä tekniset järjestelmät jossain määrin automaattista säätelyä voidaan käyttää yhteiskunnan ja villieläinten valvontajärjestelmien tutkimiseen.
Johdanto 5
Automaattisen ohjausjärjestelmän (ACS) toimintakaavion kehittäminen 6
Differentiaaliyhtälöiden ja järjestelmän elementtien siirtofunktioiden kehittäminen. 7
Kehitys lohkokaavio SAR 11
ACS:n rakennekaavion muuntaminen kanoniseen muotoon 12
ACS-vakauden analyysi algebrallisten kriteerien perusteella 13
Ohimenevien prosessien laskenta ja rakentaminen säätelevien ja häiritsevien vaikutusten kanavien varrella. viisitoista
Ohimenevä laadunarviointi 17
Grafiikkasovellus 19
Viitteet 22
Johdanto
Automaattisten ohjausjärjestelmien toiminnallisessa suunnittelussa käytetään useimmiten automaattisen ohjauksen teorian menetelmiä. Automaattinen järjestelmä koostuu useista teknisistä laitteista, joilla on tietyt toiminnalliset ja dynaamiset ominaisuudet. Niiden kuvausta ja tutkimista varten automaattista järjestelmää edustaa tietty joukko elementtejä, joilla on vastaavat ominaisuudet.
Todelliset tekniset kohteet kuvataan epälineaarisilla differentiaali- ja algebrallisilla yhtälöillä. Mutta koska suunnittelun alkuvaiheessa ne ratkaisevat teknisten ratkaisujen alustavan arvioinnin ja ennustamisen ongelmat, on varsin järkevää käyttää suhteellisen yksinkertaisia matemaattisia malleja näihin tarkoituksiin. Tässä suhteessa matemaattisen mallin epälineaariset yhtälöt linearisoidaan.
Automaattisten järjestelmien kuvausta yksinkertaistetaan huomattavasti käyttämällä operaatiolaskennan menetelmiä. Laplace-muunnoksen avulla lineaarinen differentiaaliyhtälö pelkistetään algebrallinen yhtälö monimutkaisilla muuttujilla.
Automaattisen ohjausjärjestelmän (sar) toimintakaavion kehittäminen
ACS voidaan edustaa kahdella pääosalla - säätökohde ja säätölaite - säädin.
Objektin tila määräytyy useilla arvoilla, jotka kuvaavat:
Vaikutus säätölaitteiden kohteeseen;
Vaikutus ulkoisen ympäristön kohteeseen;
Prosessien kulku itse kohteen sisällä.
Yleensä sääntelyn kohde voidaan esittää seuraavalla kaaviolla:
Riisi. 1. Sääntelyn kohteen kaavio
missä Z on hallittujen ulkoisten vaikutusten kokonaisuus;
F - hallitsemattomat ulkoiset vaikutukset;
X – sääntelyvaikutukset;
U - säädettävät arvot.
Tässä tapauksessa esineellä (DC-generaattorilla) on yksi säädettävä tehoste (pakotettu virta i c) ja yksi säädettävä arvo (puristinjännite U n) ja sitä kutsutaan yksinkertaiseksi tai yksikytketyksi.
Säädeltävän kohteen käyttäytymistä voidaan tarkastella staattisen ja dynamiikan moodeissa. Toiminnallinen kaavio on kaavio, jossa jokainen järjestelmän toiminnallinen elementti vastaa tiettyä linkkiä. Kehitetyn ATS:n kaaviokuva on esitetty graafisessa liitteessä.
Tämän ACS:n toimintakaavio näyttää tältä:
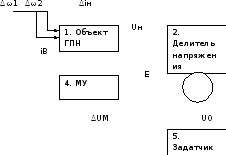
Kuva 2. ACS:n toimintakaavio
Missä 1 - säätökohde - vakiojännitegeneraattori;
2 – jännitteenjakaja;
3 - vertailulaite, on stimuloiva solmu;
4 - vahvistin (tapauksessamme magneettinen vahvistin, jossa on itsemagnetoituva);
5 - setter - laite asennuksen asettamiseen.
Magneettivahvistimen kuormitusvirta on ohjaussuure, joten toimintakaaviossa ei ole toimilaitetta.
Toimintaperiaate:
Säädetty arvo on generaattorin navoissa oleva jännite U n, jota verrataan referenssijännitteeseen U 0 jakajan K kautta (U 1) epäsovitus E syötetään magneettivahvistimen ohjauskäämiin. Magneettivahvistimen kuorma on apugeneraattorin virityskäämin virta.
Asetus asetetaan säädettävällä jännitteenjakajasuhteella R 1 , joka määrittää säädetyn jännitteen U n ja referenssijännitteen U 0 välisen vastaavuuden.
Häiritseviä, hallitsemattomia vaikutuksia ovat: kuormitusvirran i n aiheuttama jännitehäviö generaattorin käämeissä; kuormitusvirran i n aiheuttama häiriö; generaattorin akselien ω1 ja ω2 pyörimisnopeuden muutoksen aiheuttama häiriö; magneettivahvistimen syöttöjännitteen vaihtelu ∆U n.
Toimintakaaviomme tehtävän mukaisesti tulo- ja lähtöarvot ilmoitetaan jokaiselle toiminnalliselle lohkolle. Myös häiritsevien vaikutusten toiminnot esitetään.
Sääntelyperiaatteen mukaan automaattiset ohjausjärjestelmät on jaettu neljään luokkaan.
1. Automaattinen stabilointijärjestelmä - järjestelmä, jossa säädin ylläpitää säädetyn parametrin vakioarvoa.
2. Ohjelman ohjausjärjestelmä - järjestelmä, joka tarjoaa muutoksen ohjattuun parametriin ennalta määrätyn lain mukaisesti (ajassa).
3. Seurantajärjestelmä - järjestelmä, joka tarjoaa muutoksen ohjattuun parametriin riippuen jostain muusta arvosta.
4. Extreme control system - järjestelmä, jossa säädin säilyttää säädettävän suuren arvon, joka on optimaalinen muuttuviin olosuhteisiin.
Sääntelyyn lämpötilajärjestelmä sähkölämmityslaitteistoissa käytetään pääasiassa kahden ensimmäisen luokan järjestelmiä.
Automaattiset lämpötilansäätöjärjestelmät voidaan jakaa kahteen ryhmään toiminnan tyypin mukaan: jaksottainen ja jatkuva säätely.
Automaattiset säätimet toiminnallisia ominaisuuksia on jaettu viiteen tyyppiin: asento (rele), suhteellinen (staattinen), integraali (astaattinen), isodrominen (suhteellinen integraali), isodrominen ennakkoon ja ensimmäisellä derivaatalla.
Paikkasäätimiä kutsutaan jaksoittaiseksi ACS:ksi ja muita säätimiä jatkuvaksi ACS:ksi. Alla on automaattisissa lämpötilansäätöjärjestelmissä eniten käytettyjen sijainti-, suhteellisten, integraalisten ja isodromisten säätimien pääominaisuudet.
(Kuva 1) koostuu ohjausobjektista 1, lämpötila-anturista 2, ohjelmointilaitteesta tai lämpötilatason asettimesta 4, säätimestä 5 ja toimilaitteesta 8. Monissa tapauksissa primäärivahvistin 3 on sijoitettu anturin ja lämpötila-anturin väliin. ohjelmointilaitteen sekä ohjaimen ja ohjaimen välillä toimeenpaneva laite- toisiovahvistin 6. Lisäanturia 7 käytetään isodromisissa ohjausjärjestelmissä.
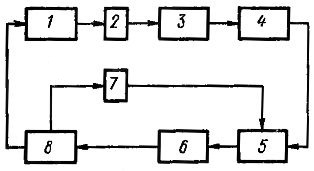
Riisi. 1. Automaattisen lämpötilan säädön toimintakaavio
Asento (rele) lämpötilansäätimet
Aseman sääntelijät ovat niitä, joissa sääntelyelimellä voi olla kaksi tai kolme erityistä asemaa. Sähkölämmitysasennuksissa käytetään kaksi- ja kolmiasentoisia säätimiä. Ne ovat yksinkertaisia ja luotettavia käytössä.
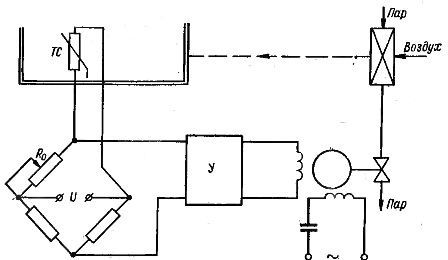
Kuvassa 2 esitetty piirikaavio kaksiasentoinen ilman lämpötilan säätö.
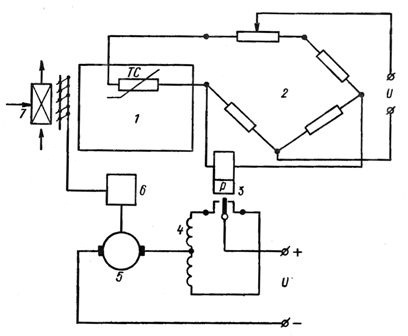
Riisi. Kuva 2. Ilman lämpötilan on-off-säädön kaavio: 1 - ohjausobjekti, 2 - mittaussilta, 3 - polarisoitu rele, 4 - moottorin herätekäämit, 5 - moottorin ankkuri, 6 - vähennysventtiili, 7 - lämpöarvo.
Säädettävän kohteen lämpötilan säätämiseen käytetään lämpövastusta TS, joka sisältyy mittasillan 2 yhteen haaraan. Sillan resistanssin arvot valitaan siten, että tietyllä lämpötilassa silta on tasapainossa, eli sillan lävistäjän jännite on nolla. Lämpötilan noustessa mittasillan diagonaaliin kuuluva polarisoitu rele 3 kytkee päälle yhden sähkömoottorin käämeistä 4 tasavirta, joka sulkeutuu supistimen 6 avulla ilmaventtiili lämmittimen edessä 7. Kun lämpötila laskee, ilmaventtiili avautuu kokonaan.
Kaksiasentoisella lämpötilansäätimellä syötettävän lämmön määrä voidaan asettaa vain kahdelle tasolle - maksimi ja minimi. Lämmön enimmäismäärän on oltava suurempi kuin on tarpeen halutun säädellyn lämpötilan ylläpitämiseksi, ja minimin on oltava pienempi. Tässä tapauksessa ilman lämpötila vaihtelee asetetun arvon ympärillä, eli ns itsevärähtelevä tila(Kuva 3, a).
Lämpötiloja τn ja τ in vastaavat viivat määrittelevät kuolleen alueen ala- ja ylärajat. Kun säädeltävän kohteen lämpötila laskeessaan saavuttaa arvon τ n, syötettävän lämmön määrä kasvaa välittömästi ja kohteen lämpötila alkaa nousta. Saavutettuaan arvon τ in, säädin vähentää lämmönsyöttöä ja lämpötila laskee.
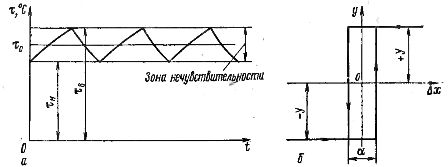
Riisi. 3. On-off-säätimen aikavaste (a) ja on-off-ohjaimen staattinen vaste (b).
Lämpötilan nousu- ja laskunopeus riippuu säädeltävän kohteen ominaisuuksista ja sen aikaominaispiirteistä (kiihtyvyyskäyrästä). Lämpötilan vaihtelut eivät ylitä kuollutta kaistaa, jos lämmönsyötön muutokset aiheuttavat välittömästi lämpötilan muutoksia, eli jos ei ole ohjatun kohteen viive.
Kuolleen alueen pienentyessä lämpötilan vaihteluiden amplitudi pienenee nollaan kohdassa τ n = τ c. Tämä kuitenkin edellyttää lämmönsyötön vaihtelua äärettömän suurella taajuudella, mikä on käytännössä erittäin vaikea toteuttaa. Kaikissa todellisissa sääntelykohteissa on viivettä. Niissä säätelyprosessi etenee suunnilleen seuraavasti.
Kun säädeltävän kohteen lämpötila laskee arvoon τ n, lämmönsyöttö muuttuu välittömästi, mutta viiveen vuoksi lämpötila jatkaa laskuaan jonkin aikaa. Sitten se nousee arvoon τ, jossa lämmönsyöttö pienenee välittömästi. Lämpötila jatkaa nousuaan jonkin aikaa, sitten heikentyneen lämmönsyötön vuoksi lämpötila laskee ja prosessi toistetaan uudelleen.
Kuvassa 3, b on esitetty on/off-ohjaimen staattinen ominaisuus. Siitä seuraa, että säädösvaikutus kohteeseen voi olla vain kaksi arvoa: maksimi ja minimi. Tarkastetussa esimerkissä maksimi vastaa asentoa, jossa ilmaventtiili (katso kuva 2) on täysin auki, minimi - kun venttiili on kiinni.
Ohjaustoimenpiteen etumerkki määräytyy säädetyn arvon (lämpötilan) poikkeaman asetetusta arvosta etumerkistä. Säätötoiminnan suuruus on vakio. Kaikissa kaksiasentoisissa säätimissä on hystereesivyöhyke α, joka johtuu sähkömagneettisen releen käyttö- ja vapautusvirtojen eroista.
Esimerkki päälle/pois lämpötilan säätimen käytöstä:
Suhteelliset (staattiset) lämpötilansäätimet
Tapauksissa, joissa vaaditaan suurta ohjaustarkkuutta tai kun itsevärähtelevää prosessia ei voida hyväksyä, käytä säätimet jatkuvalla ohjausprosessilla. Nämä sisältävät suhteelliset säätimet (P-säätimet) sopii monenlaisten teknisten prosessien ohjaamiseen.
Tapauksissa, joissa vaaditaan suurta ohjaustarkkuutta tai kun itsevärähtelevää prosessia ei voida hyväksyä, käytetään säätimiä jatkuvalla ohjausprosessilla. Näitä ovat suhteelliset säätimet (P-säätimet), jotka soveltuvat monenlaisten teknisten prosessien säätelyyn.
Automaattisissa ohjausjärjestelmissä, joissa on P-säätimet, säätelyelimen (y) sijainti on suoraan verrannollinen säädettävän parametrin (x) arvoon:
y=k1х,
missä k1 on suhteellisuustekijä (säätimen vahvistus).
Tämä suhteellisuus tapahtuu, kunnes säätöelin saavuttaa ääriasennon (rajakytkimet).
Säätökappaleen liikenopeus on suoraan verrannollinen säädettävän parametrin muutosnopeuteen.
Kuvassa Kuva 4 esittää kaavion järjestelmästä, jolla huonelämpötilaa säädetään automaattisesti suhteellisella säätimellä. Huonelämpötilaa mitataan mittasiltapiiriin 1 kuuluvalla vastuslämpömittarilla TC.

Riisi. 4. Ilman lämpötilan suhteellinen ohjauskaavio: 1 - mittaussilta, 2 - ohjausobjekti, 3 - lämmönvaihdin, 4 - kondensaattorimoottori, 5 - vaiheherkkä vahvistin.
Tietyssä lämpötilassa silta on tasapainossa. Kun säädelty lämpötila poikkeaa asetetusta arvosta, sillan diagonaaliin ilmestyy epäsymmetriajännite, jonka suuruus ja etumerkki riippuvat lämpötilapoikkeaman suuruudesta ja etumerkistä. Tätä jännitettä vahvistaa vaiheherkkä vahvistin 5, jonka lähdössä käämitään kaksivaiheinen kondensaattori moottori 4 toimilaitetta.
Toimilaite liikuttaa ohjauselementtiä muuttaen jäähdytysnesteen virtausta lämmönvaihtimeen 3. Samanaikaisesti ohjauselementin liikkeen kanssa mittaussillan toisen varren vastus muuttuu, minkä seurauksena lämpötila muuttuu, klo. jossa silta on tasapainossa.
Näin ollen jäykän takaisinkytkennän ansiosta säätelyelimen jokainen asento vastaa omaa säädetyn lämpötilan tasapainoarvoa.
Suhteelliselle (staattiselle) säätimelle on tunnusomaista jäännös epätasainen säätö.
Jos kuorma poikkeaa äkillisesti asetetusta arvosta (hetkellä t1), ohjattu parametri tulee tietyn ajan kuluttua (hetki t2) uuteen tasaiseen arvoon (kuva 4). Tämä on kuitenkin mahdollista vain sääntelyelimen uudella asemalla, eli ohjatun parametrin uudella arvolla, joka eroaa asetetusta arvosta δ:lla.

Riisi. 5. Suhteellisen ohjauksen aikaominaisuudet
Suhteellisten säätimien haittana on, että jokainen parametriarvo vastaa vain yhtä säätimen tiettyä asentoa. Parametrin (lämpötilan) asetetun arvon säilyttämiseksi kuorman (lämmönkulutuksen) muuttuessa on välttämätöntä, että säätöelin ottaa eri asennon, joka vastaa uutta kuormitusarvoa. Tätä ei tapahdu suhteellisessa säätimessä, mikä johtaa ohjatun muuttujan jäännöspoikkeamaan.
Integraali (astaattiset säätimet)
Integraali (astaattinen) kutsutaan sellaisia säätimiä, joissa parametrin poikkeaessa asetetusta arvosta säätökappale liikkuu enemmän tai vähemmän hitaasti ja koko ajan yhteen suuntaan (työiskun sisällä), kunnes parametri taas saavuttaa asetetun arvon. Säätökappaleen iskun suunta muuttuu vain, kun parametri kulkee asetetun arvon läpi.
Sähköisen toiminnan integraalisissa säätimissä luodaan yleensä keinotekoisesti kuollut alue, jonka sisällä parametrin muutos ei aiheuta säätelyelimen liikettä.
Säätökappaleen liikenopeus integroidussa säätimessä voi olla vakio ja muuttuva. Integroidun ohjaimen ominaisuus on suhteellisen suhteen puuttuminen ohjatun parametrin vahvistettujen arvojen ja sääntelyelimen aseman välillä.
Kuvassa Kuva 6 esittää kaavion automaattisesta lämpötilansäätöjärjestelmästä, jossa käytetään integroitua säädintä. Siinä, toisin kuin suhteellisessa lämpötilansäätöpiirissä (katso kuva 4), siinä ei ole kovaa takaisinkytkentää.
Riisi. 6. Kaava yhtenäinen säätely ilman lämpötila
Integroidussa säätimessä säätökappaleen nopeus on suoraan verrannollinen ohjatun parametrin poikkeamaan.
Integroidun lämpötilan säädön prosessi kuormituksen (lämmönkulutuksen) äkillisen muutoksen kanssa on esitetty kuvassa. 7 aikaominaisuuksien avulla. Kuten kaaviosta näkyy, ohjattu muuttuja integroidulla ohjauksella palaa hitaasti asetettuun arvoon.

Riisi. 7. Integraalisäädön aikaominaisuudet
Isodromic (suhteellinen-integraali) ohjaimet
Isodrominen säätö sillä on sekä suhteellisen että integraalisäätelyn ominaisuuksia. Säätökappaleen liikenopeus riippuu säädettävän parametrin poikkeaman suuruudesta ja nopeudesta.
Jos ohjattu parametri poikkeaa asetetusta arvosta, säätö suoritetaan seuraavasti. Aluksi säätökappale liikkuu ohjatun parametrin poikkeaman suuruudesta riippuen, eli tapahtuu suhteellinen säätö. Sitten säätöelin tekee lisäliikkeen, joka on tarpeen jäännösepätasaisuuden poistamiseksi (integroitu säätö).
Isodrominen ilman lämpötilan säätöjärjestelmä (kuva 8) saadaan korvaamalla suhteellisen säätöpiirin jäykkä takaisinkytkentä (katso kuva 5) elastisella takaisinkytkimellä (säätimestä takaisinkytkentävastuksen liukusäätimeen). Sähköinen takaisinkytkentä isodromisessa järjestelmässä suoritetaan potentiometrillä ja johdetaan ohjausjärjestelmään resistanssin R ja kapasitanssin C sisältävän piirin kautta.
Transienttiprosessien aikana takaisinkytkentäsignaali yhdessä parametrien poikkeamasignaalin kanssa vaikuttaa järjestelmän seuraaviin elementteihin (vahvistin, sähkömoottori). Kun säätökappale on paikallaan, missä tahansa asennossa se on, kondensaattorin C latautuessa takaisinkytkentäsignaali vaimenee (vakiotilassa se on nolla).
Riisi. 8. Isodromisen ilman lämpötilan säätökaavio
Isodromiselle ohjaukselle on tyypillistä, että ohjauksen epäyhtenäisyys (suhteellinen virhe) pienenee ajan myötä lähestyen nollaa. Tässä tapauksessa takaisinkytkentä ei aiheuta ohjatun muuttujan jäännöspoikkeamia.
Siten isodrominen ohjaus johtaa paljon parempiin tuloksiin kuin suhteellinen tai integraalinen ohjaus (puhumattakaan paikkaohjauksesta). Suhteellinen ohjaus jäykän palautteen läsnäolon vuoksi tapahtuu melkein välittömästi, isodromisesti - hitaasti.
Ohjelmistojärjestelmät automaattiseen lämpötilan säätöön
Ohjelmaohjauksen toteuttamiseksi on tarpeen jatkuvasti vaikuttaa säätimen asetukseen (asetuspisteeseen), jotta ohjattu arvo muuttuu ennalta määrätyn lain mukaan. Tätä tarkoitusta varten säätimen viritysyksikkö toimitetaan ohjelmistoelementin kanssa. Tämän laitteen tehtävänä on määrittää annetun arvon muutoslaki.
Sähkölämmityksen aikana ACS-toimilaite voi kytkeä päälle tai pois osia sähkölämmityselementeistä ja muuttaa siten lämmitettävän laitteiston lämpötilaa tietyn ohjelman mukaisesti. Ilman lämpötilan ja kosteuden ohjelmistosäätöä käytetään laajalti keinotekoisissa ilmasto-asennuksissa.
Nykyaikainen automaattisen ohjauksen teoria on ohjausteorian pääosa. Automaattinen ohjausjärjestelmä koostuu säädettävästä objektista ja ohjaimista, jotka vaikuttavat kohteeseen, kun yksi tai useampi säädettävä muuttuja muuttuu. Tulosignaalien (ohjaus tai häiriö) vaikutuksesta ohjatut muuttujat muuttuvat. Sääntelyn tarkoituksena on muodostaa sellaisia lakeja, joissa tuotossäädellyt muuttujat poikkeaisivat vain vähän vaadituista arvoista. Tämän ongelman ratkaisua monissa tapauksissa monimutkaistaa satunnaisten häiriöiden (kohina) läsnäolo. Tällöin on valittava sellainen ohjauslaki, jossa ohjaussignaalit kulkisivat järjestelmän läpi pienin vääristymin ja kohinasignaaleja ei käytännössä välitettäisi.
Automaattisen ohjauksen teoria on edennyt pitkälle kehityksessään. Alkuvaiheessa luotiin menetelmiä jatkuvan säätelyn vakauden, laadun ja tarkkuuden analysoimiseksi. lineaariset järjestelmät. Sitten diskreettien ja diskreettien analyysimenetelmiä. jatkuvat järjestelmät. Voidaan todeta, että jatkuvien järjestelmien laskentamenetelmät perustuvat taajuusmenetelmiin ja diskreettien ja diskreetti-jatkuvien järjestelmien laskentamenetelmät z-muunnosmenetelmiin.
Parhaillaan kehitetään menetelmiä epälineaaristen automaattisten ohjausjärjestelmien analysointiin. Superpositioperiaatteen rikkominen epälineaarisissa järjestelmissä, useiden vuorottelevien (vaikutuksesta riippuen) stabiilien, epävakaiden liikkeiden ja itsevärähtelyjen esiintyminen vaikeuttaa niiden analysointia. Suunnittelija kohtaa vielä suurempia vaikeuksia laskeessaan äärimmäisiä ja itsesäätyviä ohjausjärjestelmiä.
Sekä automaattisen ohjauksen teoria että ohjauksen teoria sisältyvät tieteeseen yleisnimellä "tekninen kybernetiikka", joka on nyt saanut merkittävää kehitystä. Tekninen kybernetiikka tutkii monimutkaisten dynaamisten ohjausjärjestelmien yleisiä malleja teknologisille ja tuotantoprosessit. Tekninen kybernetiikka, automaattiohjaus ja automaattinen säätö kehittyvät kahteen pääsuuntaan: ensimmäinen liittyy jatkuvaan edistymiseen ja parantumiseen elementtien suunnittelussa ja niiden valmistustekniikassa; toinen - näiden elementtien tai niiden ryhmien rationaalisimmalla käytöllä, mikä on järjestelmien suunnittelun tehtävä.
Automaattisten ohjausjärjestelmien suunnittelu voidaan suorittaa kahdella tavalla: analyysimenetelmällä, kun ennalta valitulla järjestelmärakenteella (laskemalla tai mallintamalla) määritetään sen parametrit;
synteesimenetelmällä, kun järjestelmälle valitaan välittömästi vaatimusten mukaisesti paras rakenne ja parametrit. Molemmat menetelmät ovat laajalti käytännön käyttöä ja siksi ne käsitellään kokonaisuudessaan tässä kirjassa.
Järjestelmän parametrien määrittäminen, kun sen rakenne ja vaatimukset koko järjestelmälle tunnetaan, viittaa synteesiongelmaan. Ratkaisu tähän ongelmaan lineaarisella ohjausobjektilla voidaan löytää käyttämällä esimerkiksi taajuusmenetelmiä, juurilocusmenetelmää tai tutkimalla suljetun järjestelmän ominaisyhtälön juurien liikeratoja. Korjaavan laitteen valinta synteesillä luokkahuoneessa rationaaliset murtofunktiot kompleksimuuttuja voidaan tehdä käyttämällä kuvaajaa analyyttiset metodit. Samoilla menetelmillä on mahdollista syntetisoida korjaavia laitteita, jotka vaimentavat itsevärähteleviä ja epävakaita jaksollisia moodeja epälineaarisissa järjestelmissä.
Synteesimenetelmiä kehitettiin edelleen maksimaalisen ja dynaamisen ohjelmoinnin periaatteiden pohjalta, kun määritetään tietyn laatukriteerin kannalta optimaalinen ohjauslaki, joka antaa järjestelmän laadun ylärajan, jonka tulee olla pyrittiin sitä suunnitellessaan. Tämän ongelman ratkaisu ei kuitenkaan käytännössä aina ole mahdollista järjestelmän fysikaalisten prosessien matemaattisen kuvauksen monimutkaisuuden, itse optimointiongelman ratkaisemisen mahdottomuuden ja löydetyn epälineaarisen ohjauslain teknisen toteutuksen vaikeuksien vuoksi. On huomattava, että monimutkaisten ohjauslakien toteuttaminen on mahdollista vain, kun digitaalinen tietokone on sisällytetty järjestelmäsilmukkaan. Äärimmäisten ja itsesäätyvien järjestelmien luominen liittyy myös analogisten tai digitaalisten tietokoneiden käyttöön.
Automaattisten ohjausjärjestelmien muodostus tapahtuu pääsääntöisesti analyyttisten analyysi- tai synteesimenetelmien perusteella. Ohjausjärjestelmien suunnittelun tässä vaiheessa laaditaan hyväksyttyjen oletusten perusteella järjestelmän matemaattinen malli ja valitaan sen alustava rakenne. Mallin tyypistä (lineaarinen tai epälineaarinen) riippuen valitaan laskentamenetelmä parametrien määrittämiseksi, jotka antavat määritellyt stabiilisuuden, tarkkuuden ja laadun indikaattorit. Tämän jälkeen matemaattista mallia jalostetaan ja välineitä käyttäen matemaattinen mallinnus määrittää järjestelmän dynaamiset prosessit. Eri tulosignaalien vaikutuksesta otetaan taajuusominaisuudet ja verrataan niitä laskettuihin. Sitten lopulta määritetään järjestelmän stabiilisuusmarginaalit vaiheessa ja moduulissa ja löydetään tärkeimmät laatuindikaattorit.
Lisäksi mallille tyypillisten ohjaustoimintojen asettaminen; poistaa tarkkuusominaisuudet. Matemaattisen mallinnuksen pohjalta laaditaan tekniset vaatimukset järjestelmälaitteistolle. Valmistetuista laitteista kootaan ohjain, joka siirretään puoliluonnolliseen mallinnukseen, jossa ohjausobjekti kerätään matemaattisen mallin muodossa.
HIL-mallinnuksen tuloksena saatujen ominaisuuksien perusteella tehdään päätös ohjaimen soveltuvuudesta työskennellä todellisen säätökohteen kanssa. Säätimen parametrien lopullinen valinta ja sen säätö tehdään luonnollisissa olosuhteissa ohjausjärjestelmän kokeellisen kehittämisen aikana.
Tila- ja z-muunnosten yhtälöihin, maksimiperiaatteeseen ja dynaamiseen ohjelmointimenetelmään perustuvan automaattisen ohjauksen teorian kehittäminen parantaa ohjausjärjestelmien suunnittelumenetelmää ja mahdollistaa erittäin tehokkaiden automaattisten järjestelmien luomisen eniten. eri toimialoilla Kansallinen talous.
Tällä tavalla saadut automaattiset ohjausjärjestelmät varmistavat tuotteiden korkean laadun, alentavat niiden kustannuksia ja lisäävät työn tuottavuutta.





