Voit parantaa merkittävästi säätelyn tarkkuutta soveltamalla PID-lakia (Proportional-Integral-Differential Regulation law).
PID-lain täytäntöönpanossa käytetään kolmea päämuuttujaa:
P – suhteellinen kaista, %;
I – integrointiaika, s;
D on differentiaatioaika, s.
PID-säätimen manuaalinen viritys (parametrien P, I, D arvojen määrittäminen), joka tarjoaa vaaditun säädön laadun, on melko monimutkaista ja sitä käytetään harvoin käytännössä. UT/UP-sarjan PID-säätimet tarjoavat automaattisen PID-parametrien virityksen tiettyä ohjausprosessia varten säilyttäen samalla mahdollisuuden manuaaliseen säätöön.
Suhteellinen
Suhteellisuuskaistalla, joka määritetään kertoimella P, ohjaussignaali muuttuu suhteessa asetusarvon ja parametrin todellisen arvon eroon (epäsovitus):
ohjaussignaali = 100/P E,
missä E on yhteensopimattomuus.
Suhteellisuuskerroin (vahvistus) K on kääntäen verrannollinen P:hen:
Suhteellinen kaista määritellään suhteessa asetettuun ohjausohjearvoon, ja tällä kaistalla ohjaussignaali muuttuu 0:sta 100 %:iin eli jos oloarvo ja asetusarvo ovat samat, lähtösignaalin arvo on 50 %.
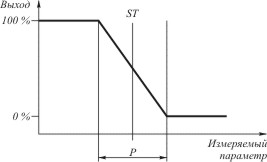
jossa P on suhteellinen kaista;
ST - säädön asetuspiste.
Esimerkiksi:
mittausalue 0…1000 °С;
ohjausasetusarvo ST = 500 °С;
suhteellinen vyöhyke P = 5 %, joka on 50 °C (5 % 1000 °C:sta);
lämpötila-arvossa 475 °C tai sen alapuolella ohjaussignaalin arvo on 100 %; 525 °C:ssa ja sen yläpuolella - 0 %. Alueella 475…525 °C (suhteellisella kaistalla) ohjaussignaali muuttuu suhteessa epäsovitusarvoon vahvistuksella K = 100/P = 20.
Suhteellisuuskaistan P arvon pienentäminen lisää säätimen vastetta epäsovitukseen, eli pieni epäsovitus vastaa suurempaa ohjaussignaalin arvoa. Mutta samaan aikaan suuren vahvistuksen vuoksi prosessi saa värähtelevän luonteen asetusarvon ympärillä, eikä tarkkaa ohjausta voida saavuttaa. Suhteellisuuskaistan liiallisella kasvulla säädin reagoi liian hitaasti tuloksena olevaan epäsovitukseen eikä pysty seuraamaan prosessin dynamiikkaa. Näiden suhteellisen ohjauksen haittojen kompensoimiseksi otetaan käyttöön lisäaikaominaisuus - kiinteä komponentti.
kiinteä komponentti
Sen määrää integrointiaikavakio I, se on ajan funktio ja tarjoaa muutoksen vahvistuksessa (suhteellisen kaistan siirtymä) tietyn ajanjakson aikana.
ohjaussignaali = 100/P E + 1/I ∫ E dt.
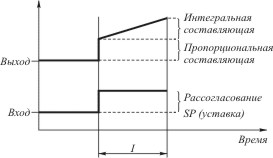
Kuten kuvasta voidaan nähdä, jos ohjauslain suhteellinen komponentti ei vähennä epäsovitusta, niin integraalikomponentti alkaa vähitellen kasvattaa vahvistusta ajanjakson I aikana. Ajan I kuluttua tämä prosessi toistetaan. Jos epäsuhta on pieni (tai pienenee nopeasti), vahvistus ei kasva ja jos parametrin arvo on yhtä suuri kuin määritetty asetus, se ottaa jonkin minimiarvon. Tässä suhteessa kiinteään komponenttiin viitataan automaattisena ohjaussammutustoiminnona. PID-säädön tapauksessa prosessin askelvaste on vaihtelua, joka vaimenee vähitellen kohti asetuspistettä.
Johdannainen termi
Monet ohjausobjektit ovat melko inertiaalisia, eli niillä on viive vasteessa suoritettuun toimintoon (kuollut aika) ja jatkavat vastaamista ohjaustoiminnon poistamisen jälkeen (viiveaika). Tällaisten kohteiden PID-säätimet ovat aina myöhässä ohjaussignaalin kytkemisestä päälle/pois. Tämän vaikutuksen eliminoimiseksi otetaan käyttöön differentiaalikomponentti, joka määräytyy differentiaatioaikavakion D avulla, ja PID-säätölain täysi toteutus saadaan aikaan. Differentiaalikomponentti on epäsovituksen aikaderivaata, eli se on ohjausparametrin muutosnopeuden funktio. Siinä tapauksessa, että yhteensopimattomuus tulee vakioarvo, differentiaalikomponentti lakkaa vaikuttamasta ohjaussignaaliin.
ohjaussignaali = 100/P E + 1/I ∫ E dt + D d/dt E.
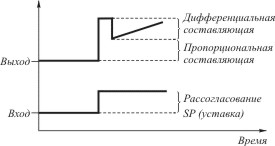
Differentiaalikomponentin käyttöönoton myötä säädin alkaa ottaa huomioon kuollutta aikaa ja viiveaikaa muuttamalla ohjaussignaalia etukäteen. Näin voidaan merkittävästi vähentää prosessin vaihteluita asetusarvon ympärillä ja saavuttaa transientin nopeampi loppuunsaattaminen.
Näin ollen PID-säätäjät ottavat ohjaussignaalia generoitaessa huomioon itse ohjausobjektin ominaisuudet, ts. analysoida eron suuruuden, keston ja muutoksen nopeuden suhteen. Toisin sanoen PID-säädin "ennakoi" säädettävän kohteen reaktion ohjaussignaaliin ja alkaa muuttaa ohjaustoimintoa ei silloin, kun asetusarvo saavutetaan, vaan etukäteen.
5. Siirtofunktio, jonka linkki on edustettuna: K (p) \u003d K / Tr
Järjestelmissä, joissa on tämä ohjausmenetelmä, hystereesin ja rajoitetun ohjaussignaalin vuoksi parametrin todellinen arvo vaihtelee aina ajoittain suhteessa asetettuun arvoon, ts. aina on epäsopivuus. Ohjaustarkkuutta voidaan hieman lisätä pienentämällä kytkentähystereesiä, mutta tämä johtaa lähtöreleen kytkentätaajuuden kasvuun ja sen laskuun. elinkaari. Tämän tyyppiset säätimet eivät siis sovellu tehtäviin, joissa ohjausparametri on erittäin dynaaminen ja joissa vaaditaan säädetyn parametrin arvon tarkkaa ylläpitoa. Rajasäätimien mahdollinen käyttö - kohteet, joilla on suuri inertia ja alhaiset ohjaustarkkuuden vaatimukset.
PID-säätö
Voit parantaa merkittävästi säätelyn tarkkuutta soveltamalla PID-lakia (Proportional-Integral-Differential Regulation law).
PID-lain täytäntöönpanossa käytetään kolmea päämuuttujaa:
P – suhteellinen kaista, %;
I – integrointiaika, s;
D on differentiaatioaika, s.
PID-säätimen manuaalinen viritys (parametrien P, I, D arvojen määrittäminen), joka tarjoaa vaaditun säädön laadun, on melko monimutkaista ja sitä käytetään harvoin käytännössä. UT/UP-sarjan PID-säätimet tarjoavat automaattisen PID-parametrien virityksen tiettyä ohjausprosessia varten säilyttäen samalla mahdollisuuden manuaaliseen säätöön.
Suhteellinen
Suhteellisuuskaistalla, joka määritetään kertoimella P, ohjaussignaali muuttuu suhteessa asetusarvon ja parametrin todellisen arvon eroon (epäsovitus):
ohjaussignaali = 100/P E,
missä E on yhteensopimattomuus.
Suhteellisuuskerroin (vahvistus) K on kääntäen verrannollinen P:hen:
Suhteellinen kaista määritellään suhteessa asetettuun ohjausohjearvoon, ja tällä kaistalla ohjaussignaali muuttuu 0:sta 100 %:iin eli jos oloarvo ja asetusarvo ovat samat, lähtösignaalin arvo on 50 %.
jossa P on suhteellinen kaista;
ST - säädön asetuspiste.
Esimerkiksi:
mittausalue 0…1000 °С;
ohjausasetusarvo ST = 500 °С;
suhteellinen vyöhyke P = 5 %, joka on 50 °C (5 % 1000 °C:sta);
lämpötila-arvossa 475 °C tai sen alapuolella ohjaussignaalin arvo on 100 %; 525 °C:ssa ja sen yläpuolella - 0 %. Alueella 475…525 °C (suhteellisella kaistalla) ohjaussignaali muuttuu suhteessa epäsovitusarvoon vahvistuksella K = 100/P = 20.
Suhteellisuuskaistan P arvon pienentäminen lisää säätimen vastetta epäsovitukseen, eli pieni epäsovitus vastaa suurempaa ohjaussignaalin arvoa. Mutta samaan aikaan suuren vahvistuksen vuoksi prosessi saa värähtelevän luonteen asetusarvon ympärillä, eikä tarkkaa ohjausta voida saavuttaa. Suhteellisuuskaistan liiallisella kasvulla säädin reagoi liian hitaasti tuloksena olevaan epäsovitukseen eikä pysty seuraamaan prosessin dynamiikkaa. Näiden suhteellisen ohjauksen haittojen kompensoimiseksi otetaan käyttöön lisäaikaominaisuus - kiinteä komponentti.
kiinteä komponentti
Sen määrää integrointiaikavakio I, se on ajan funktio ja tarjoaa muutoksen vahvistuksessa (suhteellisen kaistan siirtymä) tietyn ajanjakson aikana.
ohjaussignaali = 100/P E + 1/I ∫ E dt.
Kuten kuvasta voidaan nähdä, jos ohjauslain suhteellinen komponentti ei vähennä epäsovitusta, niin integraalikomponentti alkaa vähitellen kasvattaa vahvistusta ajanjakson I aikana. Ajan I kuluttua tämä prosessi toistetaan. Jos epäsuhta on pieni (tai pienenee nopeasti), vahvistus ei kasva ja jos parametrin arvo on yhtä suuri kuin määritetty asetus, se ottaa jonkin minimiarvon. Tässä suhteessa kiinteään komponenttiin viitataan automaattisena ohjaussammutustoiminnona. PID-säädön tapauksessa prosessin askelvaste on vaihtelua, joka vaimenee vähitellen kohti asetuspistettä.
Johdannainen termi
Monet ohjausobjektit ovat melko inertiaalisia, eli niillä on viive vasteessa suoritettuun toimintoon (kuollut aika) ja jatkavat vastaamista ohjaustoiminnon poistamisen jälkeen (viiveaika). Tällaisten kohteiden PID-säätimet ovat aina myöhässä ohjaussignaalin kytkemisestä päälle/pois. Tämän vaikutuksen eliminoimiseksi otetaan käyttöön differentiaalikomponentti, joka määräytyy differentiaatioaikavakion D avulla, ja PID-säätölain täysi toteutus saadaan aikaan. Differentiaalikomponentti on epäsovituksen aikaderivaata, eli se on ohjausparametrin muutosnopeuden funktio. Siinä tapauksessa, että epäsovituksesta tulee vakioarvo, differentiaalikomponentti lakkaa vaikuttamasta ohjaussignaaliin.
ohjaussignaali = 100/P E + 1/I ∫ E dt + D d/dt E.
Differentiaalikomponentin käyttöönoton myötä säädin alkaa ottaa huomioon kuollutta aikaa ja viiveaikaa muuttamalla ohjaussignaalia etukäteen. Näin voidaan merkittävästi vähentää prosessin vaihteluita asetusarvon ympärillä ja saavuttaa transientin nopeampi loppuunsaattaminen.
Näin ollen PID-säätäjät ottavat ohjaussignaalia generoitaessa huomioon itse ohjausobjektin ominaisuudet, ts. analysoida eron suuruuden, keston ja muutoksen nopeuden suhteen. Toisin sanoen PID-säädin "ennakoi" säädettävän kohteen reaktion ohjaussignaaliin ja alkaa muuttaa ohjaustoimintoa ei silloin, kun asetusarvo saavutetaan, vaan etukäteen.
Erilaisia automaatiolaitteita luotaessa tehtävänä on usein tarjota moottorin akselille tietty pyörimisnopeus, joka on riippumaton sen hetkisestä kuormituksesta.
Ei ole vaikea nähdä, että moottorin akselin pyörimisnopeus ei riipu pelkästään moottorin jännitteestä, vaan myös ulkoisista tuntemattomista moottoriin kohdistuvista vaikutuksista, kuten muuttuvasta kitkavoimasta, muuttuvasta kuormasta, lämpötilasta, voitelun laadusta ja muut tekijät. Siksi tehtävä moottorin akselin tietyn pyörimisnopeuden aikaansaamiseksi on rajoitettu tehtävään sellaisen jännitteen generoimiseksi moottoriin, joka saa aikaan moottorin tietyn pyörimisnopeuden ulkoisten satunnaisten tekijöiden vaikutuksesta riippumatta.
Tämän ongelman ratkaiseminen ilman teoriaa automaattinen ohjaus mahdotonta. Ongelman ratkaisu koostuu laskennasta ja toteutuksesta PID-nopeudensäädin. Dean-Softin asiantuntijoilla on kokemusta tällaisten ongelmien ratkaisemisesta.
PID-säädin antaa toimilaitteelle (moottorille) tietyn nopeuden, riippumatta siihen vaikuttavasta jatkuvasta tai hitaasti muuttuvasta kuormituksesta.
PID-säädin on suhteellinen-integraali-differentiaalisäädin. PID-säädin koostuu vastaavasti suhteellisesta ( K p ), kiinteä ( K ja / s ) ja ero ( K d s ) -linkki, jokaisella niistä on oma vahvistus (kuva 1).
Riisi. 1. PID-säätimellä varustetun ohjausjärjestelmän rakennekaavio.
Tässä: s on Laplace-operaattori (kutsutaan joskus nimellä s ). Jos abstraktoidaan Laplace-muunnoksista, niin tietueet K p, K ja / s ja K d s tulee pitää vain vastaavan linkin nimityksenä, ei matemaattisena lausekkeena. Ja merkitystä ei todellakaan kannata etsiä s , koska, kuten jo sanottiin, se on operaattori, ei muuttuja.
PID-järjestelmässä todellinen nopeus V(t) moottori mitataan käyttämällä sensori.
Järjestelmän sisääntulossa nopeuden asetusarvo saapuu V perse(t) samoissa yksiköissä kuin todellinen nopeus.
Palautteen lisäys vähentää nopeusohjesignaalista V perse (t) todellinen nopeussignaali V(t) ja muodostaa virhesignaalin e (t) lähtöön:
Virhesignaali lähetetään osoitteeseen suhteellinen, kiinteä ja ero PID-säätimen linkit.
suhteellinen linkki kertoo virhesignaalin e kertoimella K p ja tuottaa lähtösignaalin y s.
kiinteä linkki integroi signaalin e(t) ajan kuluessa, kertoo kertoimella K ja ja tuottaa lähtösignaalin y ja.
erotuslinkki erottaa virhesignaalin ajan e(t) suhteen kertoen tuloksen luvulla K d ja lähtösignaalin muotoilu v d.
PID-säätimen akku summaa signaalit y s(t), y ja(t) ja v d(t) ja tuottaa lähtösignaalin y(t):
PWM ja virtakytkin suunniteltu lähettämään laskettu lähtösignaali moottorille y(t).
PID-säätimen kertoimien laskenta
Ei ole vaikea nähdä, että PID-säätimelle on ominaista kolme kerrointa K p, K ja ja K d. Näiden kertoimien laskemiseksi on tarpeen tietää ohjausobjektin, tässä tapauksessa moottorin, parametrit.
Ohjausobjektin rakenne ja parametrit
Automaattisen ohjauksen teorian näkökulmasta moottori tasavirta suunnilleen kuvataan: kaksi jaksollista linkkiä sähköisellä aikavakiolla T e ja mekaaninen aikavakio T m. Moottorin kokonaisvahvistus K moottori(Kuva 2). Itse asiassa, rakennesuunnitelma moottori on paljon monimutkaisempi, mutta tämä ei ole meille niin tärkeää tässä tapauksessa.

Riisi. 2. Moottorin rakennekaavio automaattisen ohjauksen teorian näkökulmasta.
Moottorin siirtotoiminto, kirjoitettu Laplace-operaattorilla s, seuraavat:
Moottorin vahvistusK moottori määrittää suhteellisuuden moottorin akselin pyörimisnopeuden joutokäynnillä ja tuloon syötetyn jännitteen välillä. Yksinkertaisesti sanottuna suhde on yhtä suuri kuin tyhjäkäyntinopeuden suhde V xx ja moottorin nimellisjännite U n.
Mikroprosessoritekniikassa moottorin jännite asetetaan tavanomaisissa jänniteyksiköissä ja nopeus otetaan tavanomaisissa nopeusyksiköissä.
Jos 7-bittistä PWM:ää käytetään generoimaan jännite moottoriin (katso alla), laske K moottori nimellisjännitteen arvo on 128 tavanomaista jänniteyksikköä.
tyhjäkäyntinopeus w xx, joka on ilmoitettu moottorin passitiedoissa, tulee lukea uudelleen tavanomaisina nopeusyksiköinä Vxx määräytyy sen mukaan, miten nopeusanturi on toteutettu.
Oletetaan esimerkiksi, että nopeuden mittaamiseen käytetään inkrementtianturia, joka sijaitsee moottorin akselilla ja jolla on 512 merkkiä per kierros. Mitataan nopeus tavanomaisissa yksiköissä merkkien lukumääränä laskentajaksoa kohti D t. Olkoon algoritmin suorituskyvyn arvioimalla saatu laskentajakso 0,001 sekuntia. Anna moottorin käydä tyhjäkäynnillä w xx= 5000 rpm.
Muunnetaan moottorin nopeus anturimerkkeiksi, saadaan: 5000x512 = 2560000 markkaa / min. Muunnetaan minuutit laskentajaksoiksi:
Jos moottorin parametreja ei tunneta, joutokäyntinopeus määritetään kokeellisesti. Tätä varten moottoriin syötetään tyhjäkäynnillä suurin jännite ja lukemat otetaan nopeusanturista V xx.
Mekaaninen aikavakio T m riippuu moottorin akselin, vaihteiston, hitausmomentista toimeenpaneva laite. Sen arvoa ei yleensä ole mahdollista laskea analyyttisesti. Siksi se mitataan kokeellisesti.
Tätä varten moottoriin kohdistetaan äkillisesti maksimijännite sen nimelliskuormituksella ja ohimenevä nopeudenmuutosprosessi poistetaan. V(t).
Nopeus otetaan nopeusanturista erillisinä aikoina, tallennetaan mikroprosessorin RAM-muistiin ja siirretään sitten henkilökohtaiseen tietokoneeseen. Henkilökohtainen tietokone rekonstruoi nopeudenmuutoskäyrän V(t)(Kuva 3).
 |
Riisi. 3. Transienttiprosessi tasavirtamoottorissa.
Transienttikaavion mukaan on mahdollista määrittää ensinnäkin tyhjäkäyntinopeus V xx ja toiseksi säätöaika t s. Ohjausaika määräytyy transienttiprosessin päättymisajan perusteella (aika, jolloin transienttikäyrä poikkeaa alle 1 % vakaan tilan arvosta).
Jos jätämme huomiotta sähköisen aikavakion pienen vaikutuksen T e, yleensä suuruusluokkaa pienempi kuin mekaaninen aikavakio T m, silloin DC-moottorin transienttiprosessia voidaan pitää jaksollisena vakiolla T m.
Tiedetään, että jaksollisen transienttiprosessin aika on viisi kertaa pidempi kuin sen aikavakio. Nuo.:
Tästä syystä meidän tapauksessamme saamme:
Meidän tapauksessamme kontrolliaika t s, kaaviosta päätellen, on 1,5 sekuntia. Sitten mekaaninen aikavakio T m= 1,5/5 = 0,3 s.
Siten piirrettyään transienttiprosessin graafin, löydämme mekaanisen aikavakion T m.
Sähköinen aikavakioT e määrittää moottorin ankkurimagnetoinnin inertian ja on yhtä suuri kuin moottorin ankkuriinduktanssin suhde sen käämin vastukseen:
Käytännössä ankkurin induktanssiparametreja on vaikea mitata, ja silloin ne vievät sähköisen aikavakion suuruusluokkaa pienemmäksi kuin mekaaninen aikavakio:
Tämä pätee useimpiin moottoreihin.
PID-säätimen kertoimien laskenta.
PID-säätimen kertoimien laskemiseksi tulee ratkaista dynamiikan käänteinen ongelma. Tätä varten otamme pois PID-säätimestä. Oletetaan, että ohjainrakenne, ts. sen siirtotoiminto W s(s) , on meille tuntematon. Tätä varten tunnetaan ohjausobjektin siirtofunktio Wdv(s)(Kuva 4).

Riisi. 4. Ensimmäinen kaavio DC-moottorin säätimen laskemiseksi.
Kirjoitamme suljetun järjestelmän siirtofunktion W s (s):
Selvitetään mikä järjestelmän ohimenevä prosessi sopisi meille? Olemme melko tyytyväisiä järjestelmän ajoittain tapahtuvaan transienttiprosessiin. Näin järjestelmän tulee reagoida nopeuden ja kuormituksen muutoksiin.
Olkoon transientin haluttu aikavakio T tulee olemaan suunnilleen yhtä suuri T m. Nuo. halutun järjestelmän siirtotoiminto w(s) on yhtä suuri kuin:
Yhdistäkäämme suljetun järjestelmän siirtofunktio halutun järjestelmän siirtofunktioon:
Yksinkertaisilla matemaattisilla muunnoksilla ilmaistaan tästä ohjaimen siirtofunktion lauseke W s(s):
Korvaa arvo W moottori(s):
Otetaan kertoimet käyttöön:
Saamme:
Ei ole vaikeaa nähdä, että saimme juuri kertoimen C 1 , kerroin ennen kiinteää linkkiä FROM 2 ja kerroin erottavan linkin edessä C 3. Nuo. meillä on klassinen PID-säätimen rakenne parametreineen K p=FROM 1 , K ja=C 2 ja K d=C 3 :
PID-säätimen toteutus digitaaliseen mikroprosessoriin
PID-säätimillä varustetut järjestelmät toteutetaan tällä hetkellä vain digitaalisesti, ja ohjauslakien laskeminen suoritetaan halvoilla AVR- tai MCS -51-sarjan mikroprosessoreilla. Huomaa, että mikroprosessorit ovat kokonaislukuja eivätkä tue liukulukuoperaatioita. Tämä edellyttää, että ohjelmoija mukauttaa algoritmit vastaavasti.
PID-järjestelmässä moottorin nopeus mitataan anturin avulla. Todellinen nopeus mitataan kokonaislukuina ehdollisina nopeuden yksiköinä. Tavallisesti tavanomaiset nopeuden yksiköt valitaan siten, että nopeus c.u. muutettu alueella -127 - 127 (yksi tavu), ääritapauksissa -15 - 15 (nopeus otetaan marginaalilla). Mutta joka tapauksessa nopeuslisäysten lukumäärä ei saa olla pienempi kuin vaadittu määrä nopeuksia.
Nopeutta voidaan mitata seuraavilla antureilla:
Määritetty nopeus syötetään järjestelmään samoissa tavanomaisissa yksiköissä kuin todellinen nopeus. Asetettu nopeus lähetetään yleensä ylemmän tason ohjausprosessorista tai henkilökohtaisesta tietokoneesta ja tallennetaan mikroprosessorin asianmukaisiin muistisoluihin.
Palautteen lisäys vähennetään asetetusta nopeudesta V perse todellinen nopeus V ja vastaanottaa niin sanotun virhesignaalin e:
Ottaen huomioon, että nopeus V perse ja V ovat kokonaislukuja välillä -127 - 127, tämä toiminto toteutetaan yksinkertaisesti kokonaislukumikroprosessorilla. On varmistettava, että tulos. Jos e<-127 , то e =127, а если e >12 7, sitten e = 127.
Virhesignaali e tulee PID-säätimen tuloon, ts. suhteellisessa linkissä, integraali ja differentiaali.
suhteellinen linkki tuottaa lähtösignaalin y s kertomalla hetkellinen virhesignaali kertoimella K p.
Kerroin K p edustaa yleensä muuta kuin kokonaislukuarvoa välillä 0,5 ja 2. Siksi, jos haluat kertoa kokonaisluvun yhden tavun luvun e käytä tätä kerrointa varten taulukkoa K P,i, joka lasketaan etukäteen:
varten i =-127...127Lisäksi taulukon numerot ottavat huomioon tuloksen rajoituksen, jonka pitäisi myös osoittautua yksitavuiseksi, joka ei ylitä arvoa 127. Eli jos kertolaskutulos on suurempi kuin 127, ota se yhtä suureksi kuin 127, ja jos se on pienempi kuin -127, ota se yhtä suureksi kuin -127 .
Ohjelmoijien tulee ymmärtää, että prosessori ottaa huomioon allekirjoitetun numeron i etumerkittömänä taulukkoindeksinä, joten taulukkoelementit, joiden indeksit ovat -128 - -1, ovat itse asiassa indeksialueella 128 - 255.
Sitten kerrotaan kertoimella K p korvataan taulukon elementtien valinnalla K P,i indeksillä e:
Taulukko lasketaan yleensä henkilökohtaisella tietokoneella ja siirretään mikroprosessorin muistiin.
kiinteä linkki tuottaa lähtösignaalin y ja integroimalla virhesignaalin e ajalla ja kertoimella kertomalla K ja.
Tässä: T- aika työn alkamisesta.
Digitaalinen mikroprosessori laskee integraalin vaiheittain integroimalla askeleella, joka on yhtä suuri kuin ajastimen D kellojakso t. Siten erillisessä tapauksessa kaava korvataan seuraavalla:
Tässä k on työn aloittamisesta kuluneiden laskentajaksojen lukumäärä.
Harkitse kaikkien summaa ek. Periaatteessa se on vain kaikkien arvojen summa e , jokaisessa syklissä. Tätä summaa kutsutaan kokonaissummaksi. S (ei pidä sekoittaa s - Laplace-operaattori). Integraalisumma toteutetaan globaalina muuttujana ja sitä kasvatetaan jokaisessa jaksossa virhesignaalin nykyisellä arvolla e:
PID-säädintä laskettaessa kerroin K ja yleensä välillä 0,05 - 2. Laskentajakso D t vaihtelee välillä 0,0001 - 0,002 sekuntia. Siis kerroin K ja D t on 5,10-6 - 4,10-3. Koska tämä kerroin on paljon pienempi kuin 1, silloin syntyy ongelma kokonaisluvun kertomisesta sillä, koska kertomisen jälkeen on aina nolla.
Tämän ongelman ratkaisemiseksi yritetään kertoa kerroin K ja D t jollekin suurelle numerolle A , ja jaa integraalisumma samalla luvulla:

Merkitse tuotetta K ja D t · A kertoimen kautta B :
Valitaan numero A , 256:n kerrannainen x suhteeseen B oli välillä 0,05-5.
Suhteen laskemiseksi S/A , laajenna numeron etumerkkiä S :
toteuttaa 16-bittinen laskenta S, jos A =256;
ottaa käyttöön 24-bittisen laskennan S, jos A =256 2 ;
toteuttaa 32-bittinen laskenta S, jos A =256 3 .
Ei ole vaikea toteuttaa lisääminen 16-, 24- tai 32-bittiseen numeroon S allekirjoitettu 8-bittinen numero e. Älä unohda sitä, jos e Jos se on positiivinen, etumerkkilaajennus täyttää korkean kertaluvun bitit nollilla ja jos negatiivinen, niin korkean kertaluvun bitit täytetään ykkösillä. Integraalisumman kertymisen rajoittamiseksi toteutamme ylä- ja alarajan. Tämä tehdään yleensä seuraavasti: jos merkittävin (merkki)bitti ei ole yhtä suuri kuin toiseksi viimeinen bitti, integraalisumman kasvu tulee keskeyttää.
Muista, että minkä tahansa luvun jako luvulla 256 x vastaa siirtoa oikealle x tavua oikealle. Käytetään tätä sääntöä. Ota vain integraalisumman korkea tavu S : jos kyseessä on 16-bittinen määrä, tämä vastaa yhden tavun siirtoa, 24-bittisessä määrässä - kahdella tavulla, 32-bittisessä - kolmella tavulla.
Tällä tavalla:
Missä: S vanhempi- numeron korkea tavu S .
Kertominen kertoimella B toteuttaa taulukon muodossa B i, samanlainen kuin suhteellisen linkin kertoimen laskeminen:
erotuslinkki
Johdannainen piiri laskee lähtösignaalin y d - e 0 toteutamme taulukon muodossa C i, kuten suhteellista linkkiä laskettaessa:
PID-säätimen akku
PID-säätimen perässä oleva summain lisää signaalien hetkelliset arvot y s, y ja ja v d ja tuottaa lähtösignaalin y:
Summattaessa kannattaa varmistaa, että tulos on välillä -127 - +127 toteuttamalla esimerkiksi 16-bittinen summaus. Jos tulos on suurempi kuin 127, sen tulee olla yhtä suuri kuin 127, ja jos pienempi kuin -127, niin yhtä suuri kuin -127.
AVR-mikroprosessorit generoivat PWM-signaalin automaattisesti. Yksi mikroprosessori pystyy tuottamaan jopa 3 laitteiston PWM-signaalia. Lisäksi PWM-signaali voidaan generoida ohjelmallisesti ajastimella.
On kätevää muodostaa 7-bittinen PWM. Tässä tapauksessa ohjausvirtakytkin voidaan kytkeä kuvan 1 kaavion mukaisesti. neljä.
Riisi. 4. Tapa kytkeä virtakytkin PWM-lähtöön.
Korkea (merkki) bitti tuloksesta y tulostetaan minkä tahansa I / O-nastan kautta johonkin virtakytkimen tuloista, ja loput 7 bittiä (viimeinen bitti asetetaan nollaan) voidaan ladata ilman muunnoksia PWM-katkaisun muodostusrekisteriin.
Todistetaan se.
Q.E.D.





