1.1 Peruskäsitteet ja -tyypit
AUTOMAATTINEN SÄÄTÖ
Automaattinen ohjaus on joukko toimenpiteitä, joilla pyritään toteuttamaan ohjausobjektin toiminta ohjelman ja ohjauksen tarkoituksen mukaisesti.
Ohjausobjektilla tarkoitetaan laitetta, jossa prosessin vaadittujen indikaattoreiden arvo säilyy. Ohjausobjektin todellinen tila määräytyy yhden tai useamman toimintaparametrin mukaan y i , kutsutaan säädettäviksi arvoiksi tai säädettäviksi koordinaatteiksi ja määrittävät ohjausjärjestelmän toiminnot (kuva 1.1).
Tiedätkö automaation menetelmät, periaatteet ja perusteet? Päivitä prosessi, jossa ihmisen toiminta korvataan erilaisten laitteiden ja laitteiden toiminnalla! Tutustumme erilaisiin ohjaustyyppeihin ja automaatioohjauksen toimintaan.
Ennen kaikkea ohjattiin käsin. Tämä kuitenkin muuttui automaation alkaessa. Tänään erotamme eri tyyppejä hallinta. Ohjaus on toimintaa kohden tietyn tavoitteen saavuttamiseksi. Kaikki ovat kuitenkin aina yrittäneet päästä eroon tylsästä fyysisestä ja henkisestä toiminnasta, minkä vuoksi automaatit alkoivat vähitellen vallata. Kun automaattiohjaus korvattiin käsiohjauksella, voitiin alkaa puhua automaation alusta. Jaamme automaattisen ohjauksen suoraan ja epäsuoraan.
AT todellisissa olosuhteissa ohjausobjektiin vaikuttavat ulkoiset vaikutukset, joita kutsutaan häiriöiksi f i. Pohjimmiltaan mitä tahansa fyysistä suuretta, joka luonnehtii ohjattua kohdetta, esimerkiksi nopeutta (lineaarinen ja pyörimisnopeus), jännitettä ja virtaa, lineaari- ja kulmasiirtymiä jne., voidaan käyttää säädettävinä suureina.
Kolme valvontatyyppiä ja sääntelyn määritelmä
Ensimmäisessä niistä ohjausprosessi tapahtuu ilman virtalähdettä. Tällä hetkellä kuitenkin käytetään yleisesti toista virranhallintatyyppiä, ja sitä käsitellään alla olevassa tekstissä. Voimme jakaa automaation ohjauksen virtalähteen kanssa riippuen siitä, onko sen lähtö tuettu.
Ohjausohjaus korkeampia muotoja ohjata. . Valvonta on hallintamenetelmä, jota ei voi hallita millään tavalla. Sääntely automaatiossa koostuu ylläpidosta fyysinen määrä vakioarvolla tai arvolla, joka muuttuu säännön mukaan. Määräarvoja verrataan jatkuvasti kontrollin aikana vaadittuun arvoon. Mahdolliset poikkeamat eliminoidaan puuttumalla säätelyprosessiin. Seuraava kuva havainnollistaa selvästi eron ohjauksen ja säädön välillä.
Säädettävät arvot y i määräytyy valvontatoimien avulla U i (t) ohjausobjektin sisääntulossa. Nämä vaikutukset aiheuttavat muutoksia käyttöjärjestelmän sisäiseen tilaan ja sen seurauksena ohjattuihin toimintaparametreihin.
Tyypillisesti automaattinen ohjaus suoritetaan automaattisilla ohjauslaitteilla ilman ihmisen väliintuloa. Automaattisen ohjauslaitteen ja ohjausobjektin yhdistelmä, jotka ovat vuorovaikutuksessa keskenään, muodostavat automaattisen ohjausjärjestelmän (ACS).
Korkeammat johtamismuodot ja tekoäly
Kaavio näyttää kuinka automaatio toimii. Lähde: Ivan Schwartz, Automation Fundamentals. Korkeampia ohjauksen muotoja ovat optimaalinen ohjaus, mukautuva ohjaus, oppiminen ja tekoäly. Optimaalinen ohjaus on mahdollisimman tehokasta tai päinvastoin erittäin nopeaa. Järjestelmä pystyy saavuttamaan halutut ominaisuudet minimaalisella energiankulutuksella, etsien aina edullisimpia vaikutuksia ja siten varmistaen järjestelmän parhaan toiminnan tietyissä olosuhteissa.
Automaattisen ohjauksen päätyypit ovat:
1) automaattinen ohjaus avoimella vaikutusketjulla (kova ohjaus);
2) automaattinen säätö;
3) automaattinen asetus.
Automaattisia ohjausjärjestelmiä, joissa on avoin vaikutusketju, kutsutaan yleensä avoimiksi. Näissä järjestelmissä ohjaus tapahtuu lakien mukaisesti; riippumaton todellisesta tuotannon kulusta
ATS:n toimintakaavion kehittäminen
Mukautuvalla ohjauksella järjestelmä voi jopa muuttaa rakennettaan ja parametrejaan. Sopeutuu aina optimaaliseen ohjausprosessiin, mukautuu ohjattavan kohteen parametrien muutoksiin. Johtamisprosessissa, jota kutsutaan oppimiseksi, mukautuva järjestelmä on vielä täydellisempi. Hän muistaa saamansa tiedot ja käyttää niitä uudelleen vastaavissa tilanteissa.
Tekoäly on järjestelmä, jolla on korkein hallinta. Keinotekoisesti luotu järjestelmä pystyy tunnistamaan esineitä ja ilmiöitä ja analysoimaan niiden suhteita. Tämä luo malleja ympäristöstä ja tekee mielekkäitä päätöksiä ja voi ennakoida niiden seurauksia. Tekoälyjärjestelmä voi löytää uusia malleja ja jopa parantaa suorituskykyään.
prosessi, ja se suoritetaan avoimessa silmukassa tietyn lopputuloksen saavuttamiseksi (kuva 1.2, a).
Kova tehtävä järjestelmän sisääntulossa ohjauslaitteen CU ja toimeenpaneva laite(vahvistin) DUT vaikuttaa op-vahvistimen ohjausobjektiin, jonka lähdössä arvo asetetaan X poistu vastaa tätä tehtävää X sisään .
Ohjausjärjestelmän toimintaperiaatteet hallittavassa järjestelmässä
Automaattisen ohjauksen toteuttamiseen on useita tapoja. Loogiset, jatkuvat, diskreetit ja sumeat ohjaukset eroavat toisistaan ohjausjärjestelmän toimintaperiaatteen mukaan ohjatussa järjestelmässä. Mitkä ovat kunkin ajotyypin ominaisuudet?
Tämä tapahtuu sen seurauksena, että tietokoneita käytetään ohjaimena ohjaamaan tietokoneita, jotka eivät pysty käsittelemään jatkuvaa signaalia, ja se muunnetaan erilliseksi yhteydeksi tulojen ja lähtöjen välillä, koska näytteenottojakson aikajaksossa luettujen pulssisekvenssien välinen suhde. näytteenottoajasta lyhenee nopeasti ohjattu prosessi.
- Ohjaus käyttää kaksiarvoisia muuttujia.
- Vaihtoehtoja on aina vain kaksi.
- Määrät ilmaistaan arvoina 1 ja 0.
- Muuttujien välisiä suhteita kutsutaan loogisiksi funktioiksi.
- Toiminto on asetettu pysyvästi.
- Määrät muuttuvat jatkuvasti ajan myötä.
- Luo jatkuvan linkin tulojen ja lähtöjen välille.
Tällaisissa järjestelmissä prosessin kulkua ja lähdön ohjattua arvoa ei korjata (ei ohjata), joten se voi poiketa määritetystä tilasta. Tällaisissa järjestelmissä käytettyä ohjausta kutsutaan avoimeksi ohjaukseksi.
ACS:a, jossa on avoin vaikutusketju, käytetään varmistamaan automaattisten laitteiden eri elementtien tietty toimintajakso. Monimutkaisemmissa tapauksissa voidaan suorittaa prosessin ohjelmaohjaus avoimella vaikutussyklillä. Esimerkkinä on moottorin käynnistyksen ja jarrutuksen ohjausjärjestelmä.
Se, että ohjaustoiminnot lasketaan tässä tapauksessa digitaalisesti, on syy diskretointiin järjestelmän toiminnan aikana. Itse termi diskreetti järjestelmä, toisin kuin jatkuva järjestelmä, tarkoittaa, että prosessiin sisältyvät arvot ovat pulssisarjan muodossa, joka vastaa funktion esitystapaa vain tietyssä ja periaatteessa yhtä suuressa. aikavälejä. Toinen näytteenottotyyppi, jota esiintyy myös digitaalisissa ohjausjärjestelmissä, on signaalin arvon kvantisointi.
Todellisissa järjestelmissä tärkein syy minimimuutosarvojen esiintymiseen mikrokontrollerissa käytetyn sanan pituuden lisäksi on analogia-digitaalimuuntimissa saavutettu käsittelytarkkuus. Yleinen kaava erillinen ohjausjärjestelmä on esitetty kuvassa. Ohjainlohko on esitetty tässä ratkaisussa mikrokontrolleriohjelman sisältämän ohjausalgoritmin avulla. Mitattu määrä - joka muodostaa takaisinkytkentäsignaalin - syötetään mikrokontrolleriin vain ns. näytteenottohetkellä, toistetaan jaksolla.
Avoimen silmukan ohjausjärjestelmissä ohjaus tapahtuu master-toiminnon mukaan, joka yleinen tapaus voivat edustaa ohjelman komentoja.
Tämä periaate koostuu siitä, että ohjattavan muuttujan poikkeaman asetetusta arvosta vähentämiseksi, joka ilmenee järjestelmäobjektin inertian vuoksi, ohjaustoiminto muodostetaan tämän toiminnan ja ohjausobjektin ominaisuuksien mukaisesti. (Kuva 1.2, a). 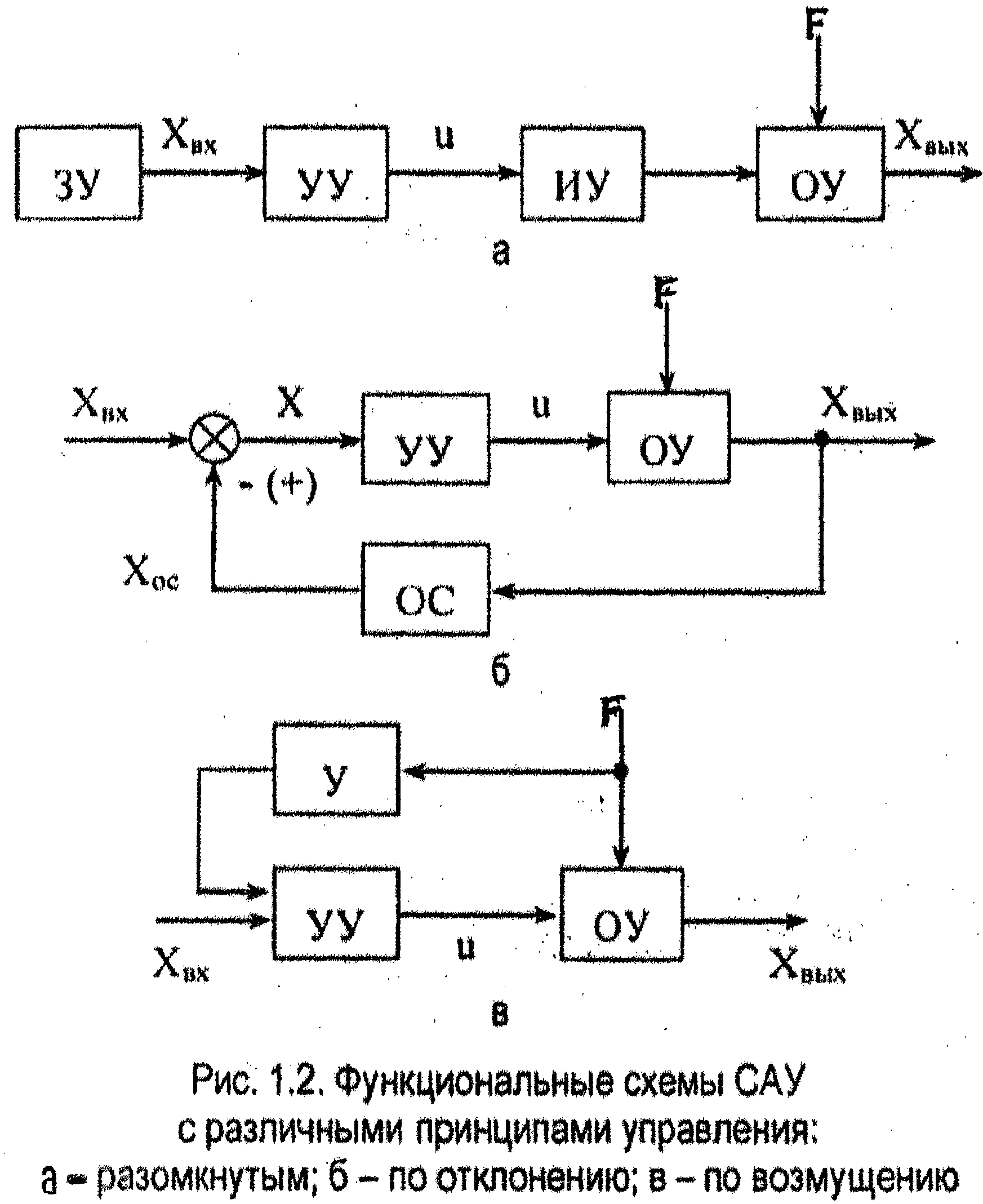
Ohjausalgoritmin laskennan tulos syötetään myös näytteenottotaajuudella, jossa sitä käytetään joko numeerisessa muodossa ohjaamaan toimeenpanojärjestelmää tai se vaatii muuntamista analogiseksi arvoksi. Erilliset digitaalipiirit korvaavat analogiset järjestelmät. Digitaalinen järjestelmä takaa säätöparametrien vakauden ajan ja lämpötilan muutoksilla sekä niiden muuttamisen helppouden, vaikka laitetta ohjataankin. Työn aikana on myös hyväksyttävää muuttaa järjestelmän rakennetta, mikä lisää huomattavasti johtamisen joustavuutta.
Ohjauslaite muuntaa ja vahvistaa päätoiminnon ja generoi ohjaustoiminnon u(t).
Ohjausyksikön lähdöstä tuleva ohjaustoiminto tulee ohjausyksikön ohjausobjektiin ja pyrkii muuttamaan ohjattua arvoa X poistu liikkeelle panevan voiman mukaisesti.
Tällaista ohjausta kutsutaan jäykiksi, koska se ei ota huomioon säädettävän muuttujan todellisia arvoja ja häiritseviä vaikutuksia (ACS-parametreja pidetään vakioina).
Yleisesti ottaen digitaaliset ohjaimet pystyvät paljon paremmin käyttämään nykyaikaisia ohjausmenetelmiä, kun otetaan huomioon suhteellisen monimutkaiset matemaattiset toiminnot. Digitaalisissa ohjausjärjestelmissä käytetyt optimointimenettelyt voivat ottaa huomioon monimutkaisemmat kriteerit, kuten nykyaikaisista tila-avaruuden ohjausrakenteista johdetut integraalikriteerit. Koska parametreja on helppo muuttaa järjestelmän toiminnan aikana, luodaan ohjaimia, joilla on ominaisuus itsevirittää tietyn kohteen parametrit automaattisesti käynnistyksen aikana suoritettujen mittausten perusteella.
HALLINNON PERUSPERIAATTEET
Ohjaustoiminnon muodostamismenetelmistä riippuen erotetaan seuraavat ohjausperiaatteet:
Häiriönhallinnan periaate,
Poikkeaman hallintaperiaate,
Yhdistetyn ohjauksen periaate.
HÄIRIÖIDEN HALLINTAPERIAATE
Avoimissa järjestelmissä erilaisten häiriöiden vaikutuksesta aiheutuvaa ohjattavan suuren poikkeamaa vaaditusta arvosta pienennetään tai eliminoidaan soveltamalla alla selostettua häiriönhallinnan periaatetta. Häiriönhallinnan toimintakaavio on esitetty kuvassa 1.2, c. Häiriönhallinnan periaate on, että ohjattavan muuttujan poikkeamaa pienennetään tai eliminoidaan X poistu asetetusta arvosta mitataan tärkein häiriövaikutus F ja muunnetaan ohjaustoiminnoksi u(t), jota sovelletaan järjestelmän tuloon kompensoimaan häiriön aiheuttamaa ohjatun muuttujan poikkeamaa. Siksi tällaisissa järjestelmissä ohjaustoiminto on häiritsevän toiminnan funktio.
järjestelmissä, joissa on häiriön ohjauksen periaate ohjaustoiminnon u(t) muodostamiseksi käytetään suoraa tietoa häiritsevästä vaikutuksesta. Siksi näissä järjestelmissä on mahdollista kompensoida täysin häiritsevän toiminnan vaikutus ohjattuun arvoon X poistu . Häiritsevän vaikutuksen vaikutuksen kompensointiaste riippuu häiritsevän vaikutuksen mittauksen tarkkuudesta ja operaatiovahvistimen ominaisuuksista.
Häiriönhallintaperiaatteella varustetun ACS:n etuna on, että niiden avulla häiriövaikutus voidaan kompensoida täysin. Tällaiset automaattiset ohjausjärjestelmät ovat avoimen silmukan, joten, kuten missä tahansa avoimen silmukan järjestelmässä, tässä ei ole vakausongelmaa.
Jos järjestelmässä on useita häiritseviä vaikutuksia, voidaan ne kaikki kompensoida erikseen samalla tavalla, mikäli ne on mahdollista mitata. Tämä kuitenkin monimutkaistaa järjestelmää. Käytännössä kompensoidaan vain häiritseviä vaikutuksia, jotka vaikuttavat jyrkimmin ohjattuun arvoon ja aiheuttavat sen merkittäviä poikkeamia vaaditusta arvosta. Tällaisia häiriöitä kutsutaan perustavanlaatuisiksi. Pieniä häiriöitä kutsutaan häiriöiksi, jotka aiheuttavat vain pieniä poikkeamia säädetystä arvosta asetetusta arvosta.
Tällaisten ACS:iden haittana on, että ne eliminoivat vain päähäiriöiden vaikutuksen. Lisäksi säädön ja kompensoinnin tarkkuus heikkenee, kun operaatiovahvistimen ominaisuudet muuttuvat.
Häiriönhallintaperiaatetta käytetään järjestelmissä, jotka on suunniteltu ylläpitämään vakioohjattua muuttujaa.
TAAIMEN SÄÄTÖPERIAATE
Automaattiselle säädölle on ominaista se, että ohjaustoiminnot ovat riippuvaisia todellisesta tuotannon kulusta prosessia, jotta vaadittu suorituskyky säilyy Tämä prosessi. Ohjaus ja tiedot tämän prosessin indikaattoreiden todellisista arvoista suoritetaan palautteen avulla.
Yleisessä tapauksessa tällainen automaattinen ohjausjärjestelmä voidaan esittää kuvassa. 1.2, b. Järjestelmä käyttää suljetun silmukan ohjausta (takaisinkytkentäperiaate tai poikkeamasäätö). Säätöpoikkeama on todellisen mitatun arvon ja asetetun arvon välinen ero. Asetusarvon ja todellisen arvon välistä käänteistä eroa kutsutaan ohjausvirheeksi. Ohjauslaite ymmärretään tekniseksi laitteeksi, jonka avulla ohjausobjektia ohjataan automaattisesti.
Hallittu arvo X poistu määräytyy ajovaikutuksen perusteella X sisään = X h järjestelmän sisääntulossa, eli järjestelmään tuotu vaikutus ja säädettävän muuttujan tarvittavan muutoslain määrittäminen. Järjestelmän tulossa vertailuelementtiin master-toiminnan lisäksi ohjattavan muuttujan todellinen arvo syötetään takaisinkytkentäpiirin kautta. Vertailuelementin lähdössä, ts. ohjauslaitteen CU tuloon ilmestyy poikkeama tai ohjaustoiminto
![]() ,
,
joka saa aikaan muutoksen säädetyssä arvossa tietyn lain mukaan.
Ohjauslaite generoi peruutuksen koosta ja merkistä riippuen sääntelytoimenpiteen ja. Suljetun ohjauksen periaate siis ottaa huomioon tehtävän lisäksi myös ohjausobjektin todellisen tilan ja olemassa olevat häiriöt. Siksi tämä periaate on yleisin ja mahdollistaa ohjausongelmien ratkaisemisen onnistuneesti ohjausobjektin epävarmuudesta ja häiriöiden luonteesta huolimatta.
Tällaisten automaattisten järjestelmien luokkaa, joka on rakennettu suljetun ohjauksen periaatteelle, kutsutaan automaattisiksi ohjausjärjestelmiksi (ACS). Tällaisten järjestelmien universaalisuus mahdollistaa niiden käytön erittäin laajasti tekniikassa ja luonnossa.
Palaute suljetuissa automaattisissa ohjausjärjestelmissä muodostaa järjestelmän staattiset ja dynaamiset ominaisuudet. Nämä ominaisuudet määräytyvät automaattisen ohjausjärjestelmän tarkoituksen ja teknologisen prosessin sille asettamien vaatimusten mukaan. Palaute ohjaa prosessin kulkua ja jos se poikkeaa määritellystä, korjaavia signaaleja lähetetään järjestelmän tuloon tai tämän palautteen piiriin kuuluvan elementtiryhmän tuloon.
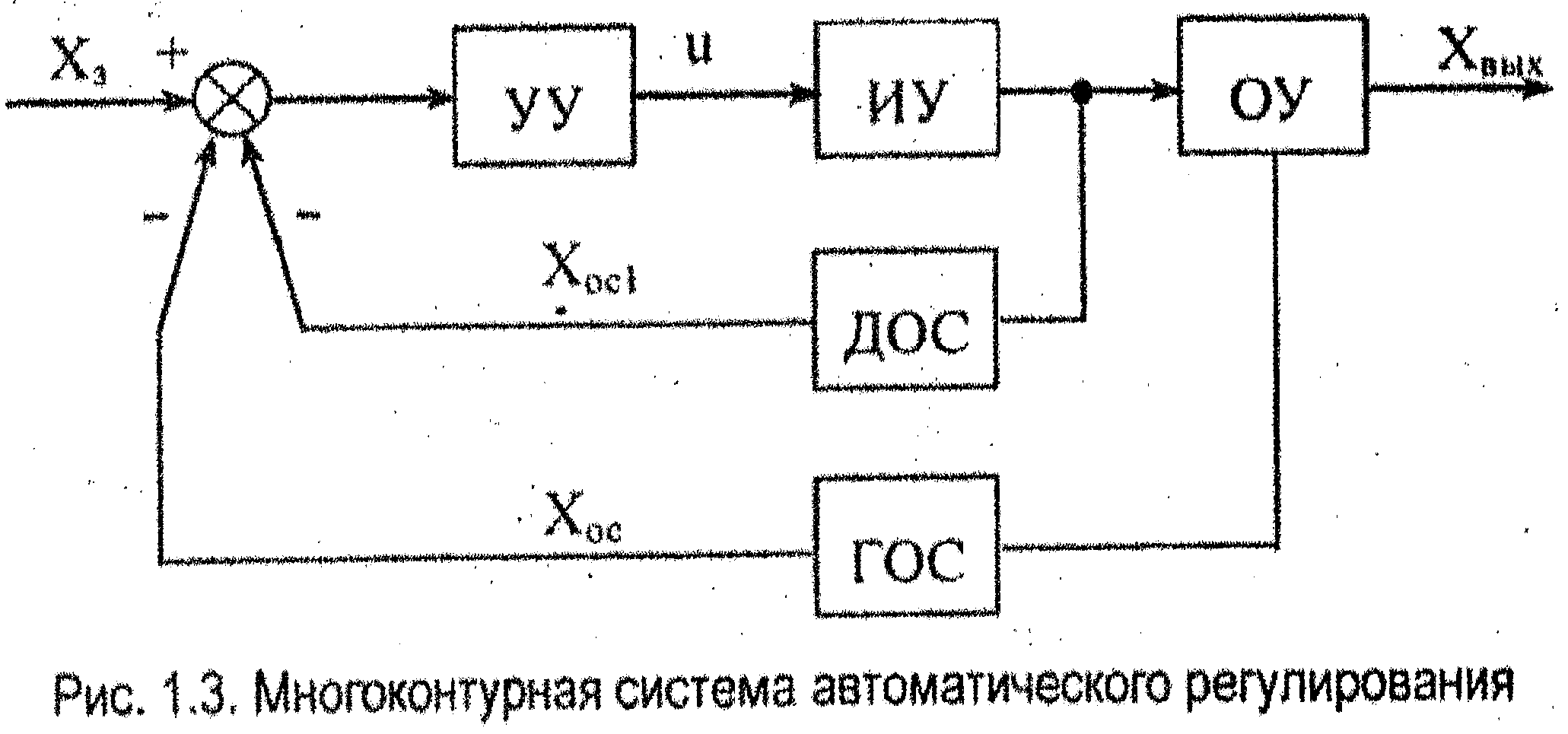
ACS:llä on oltava vähintään yksi takaisinkytkentä, jonka avulla voidaan verrata ohjatun muuttujan todellisia ja asetettuja arvoja. Tällaista palautetta kutsutaan pääpalautteeksi. Se yhdistää järjestelmän lähdön sen tuloon ja kattaa kaikki pääelementit. Järjestelmiä, joissa on yksi pääpalaute (GOS), kutsutaan yksisilmukaisiksi. Joillakin ACS:illä voi olla pääpalautteiden (GOS) lisäksi, joiden lukumäärä määräytyy ohjattujen muuttujien lukumäärän (GOS) mukaan, useita ylimääräisiä (paikallisia). Lisäpalaute (DOS) yhdistää yhden tai useamman järjestelmän elementin lähdön. ACS, jolla on pääpalautteen lisäksi yksi tai useampi lisäpalaute, kutsutaan monisilmukaiseksi (kuva 1.3).
Välitetyn iskun luonteesta riippuen takaisinkytkennät jaetaan jäykiin ja joustaviin. Jäykät takaisinkytkennät toimivat sekä vakaassa tilassa että transienttitiloissa. Joustavat takaisinkytkennät toimivat vain transienttitiloissa. Kovan palautteen toteuttamiskeinoina ovat erilaiset mittauslaitteet - anturit, jotka lähettävät signaalin vertailusolmuun. Joustavien palautteiden toteuttamiskeinoja ovat eriyttämis- ja integrointilaitteet.
Järjestelmään kohdistuvan vaikutuksen mukaan palautteet jaetaan positiivisiin ja negatiivisiin. Positiivinen, jos sisääntulon ohjaussignaali kasvaa lähtösignaalin kasvaessa, ja negatiivinen, jos sisääntulon ohjaussignaali pienenee lähtösignaalin kasvaessa.
Häiriöohjattujen järjestelmien haitat voidaan eliminoida käyttämällä yhdistettyjä ohjausjärjestelmiä, joissa häiriönhallinta yhdistetään poikkeamasäätöön. Tässä tapauksessa päähäiriön vaikutus ohjausprosessiin eliminoituu. Lisäksi ohjatun arvon palautteen läsnäolon vuoksi , pienten häiriöiden vaikutus on rajallinen. Joskus näitä järjestelmiä kutsutaan auki-suljetuiksi. Niillä on suhteellisen korkea tarkkuus tietyn ohjatun arvon ylläpitämisessä.
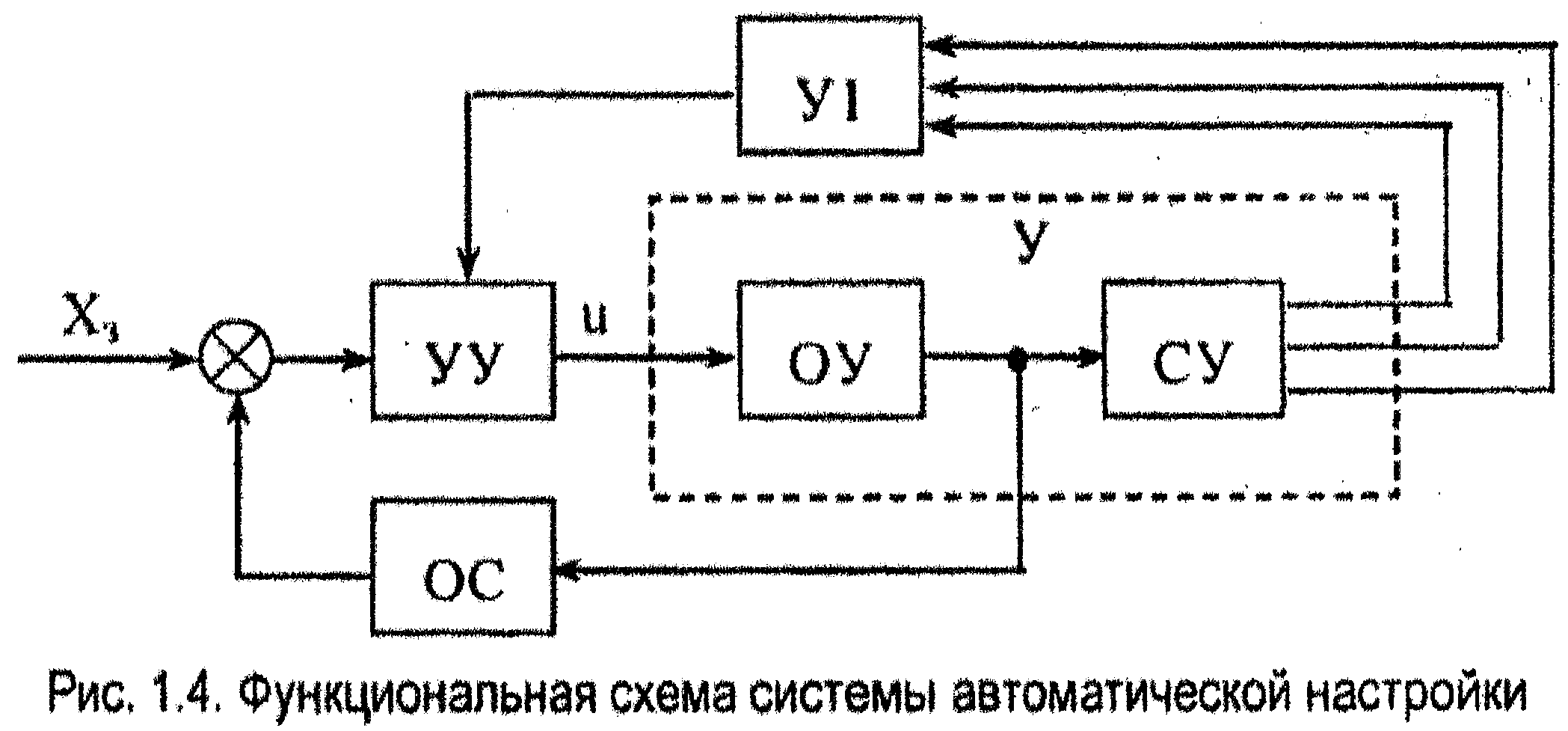
Ohjausjärjestelmän toimintakaavio, joka tarjoaa tarvittavan ohjausalgoritmin asettamisen ja valinnan ohjausobjektin käyttöolosuhteiden ja parametrien muutoksesta riippuen, on esitetty kuvassa. 1.4.
| Sisältö | 2 | |
| Johdanto | 3 | |
| 1. | yhteinen osa | |
| 1.1. | Peruskonseptit | 6 |
| 1.2. | Alkuperäisen automaattisen ohjausjärjestelmän kuvaus | 9 |
| 1.3. | ATS:n toimintakaavion kehittäminen | 13 |
| 2. | Selvitysosa | |
| 2.1. | Yksisilmukaisen ACS:n parametrinen synteesi ja analyysi | 14 |
| 2.1.1. | Staattisen ohjauksen mahdollisuuden arviointi | 15 |
| 2.1.2. | Astaattisen hallinnan mahdollisuuden arviointi | 20 |
| 2.1.3. | Yksisilmukaisen ATS:n laatututkimus | 22 |
| 3. | Ohjaussilmukan kehittäminen tietyllä parametrilla | 25 |
| Johtopäätös | 27 | |
| Bibliografia | 28 |
Johdanto
Nykyaikainen automaattisen ohjauksen teoria on ohjausteorian pääosa. Automaattinen ohjausjärjestelmä koostuu säädettävästä objektista ja ohjaimista, jotka vaikuttavat kohteeseen, kun yksi tai useampi säädettävä muuttuja muuttuu. Tulosignaalien (ohjaus tai häiriö) vaikutuksesta ohjatut muuttujat muuttuvat. Sääntelyn tarkoituksena on muodostaa sellaisia lakeja, joissa tuotossäädellyt muuttujat poikkeaisivat vain vähän vaadituista arvoista. Tämän ongelman ratkaisua monissa tapauksissa monimutkaistaa satunnaisten häiriöiden (kohina) läsnäolo. Tällöin on valittava sellainen ohjauslaki, jossa ohjaussignaalit kulkisivat järjestelmän läpi pienin vääristymin ja kohinasignaaleja ei käytännössä välitettäisi.
Automaattisen ohjauksen teoria on edennyt pitkälle kehityksessään. Alkuvaiheessa luotiin menetelmiä jatkuvan säätelyn vakauden, laadun ja tarkkuuden analysoimiseksi. lineaariset järjestelmät. Sitten diskreettien ja diskreettien analyysimenetelmiä. jatkuvat järjestelmät. Voidaan todeta, että jatkuvien järjestelmien laskentamenetelmät perustuvat taajuusmenetelmiin ja diskreettien ja diskreetti-jatkuvien järjestelmien laskenta z-muunnosmenetelmiin.
Parhaillaan kehitetään menetelmiä epälineaaristen automaattisten ohjausjärjestelmien analysointiin. Superpositioperiaatteen rikkominen epälineaarisissa järjestelmissä, useiden stabiilien, epävakaiden liikkeiden ja itsevärähtelyjen vuorottelevien (riippuen vaikutuksesta) järjestelmien läsnäolo vaikeuttaa niiden analysointia. Suunnittelija kohtaa vielä suurempia vaikeuksia laskeessaan äärimmäisiä ja itsesäätyviä ohjausjärjestelmiä.
Sekä automaattisen ohjauksen teoria että ohjauksen teoria sisältyvät tieteeseen yleisnimellä "tekninen kybernetiikka", joka on nyt saanut merkittävää kehitystä. Tekninen kybernetiikka tutkii kompleksien yleisiä malleja dynaamiset järjestelmät tekninen ja tuotantoprosessit. Tekninen kybernetiikka, automaattiohjaus ja automaattinen säätö kehittyvät kahteen pääsuuntaan: ensimmäinen liittyy jatkuvaan edistymiseen ja parantumiseen elementtien suunnittelussa ja niiden valmistustekniikassa; toinen - näiden elementtien tai niiden ryhmien rationaalisimmalla käytöllä, mikä on järjestelmien suunnittelun tehtävä.
Automaattisten ohjausjärjestelmien suunnittelu voidaan suorittaa kahdella tavalla: analyysimenetelmällä, kun ennalta valitulla järjestelmärakenteella (laskemalla tai mallintamalla) määritetään sen parametrit;
synteesimenetelmä, kun järjestelmä valitaan heti vaatimusten mukaisesti
sen paras rakenne ja parametrit. Molemmat menetelmät ovat laajalti käytännön käyttöä ja siksi ne käsitellään kokonaisuudessaan tässä kirjassa.
Järjestelmän parametrien määrittäminen, kun sen rakenne ja vaatimukset koko järjestelmälle tunnetaan, viittaa synteesiongelmaan. Ratkaisu tähän ongelmaan lineaarisella ohjausobjektilla voidaan löytää käyttämällä esimerkiksi taajuusmenetelmiä, juurilocusmenetelmää tai tutkimalla suljetun järjestelmän ominaisyhtälön juurien liikeratoja. Korjaavan laitteen valinta synteesillä luokkahuoneessa rationaaliset murtofunktiot monimutkainen muuttuja voidaan suorittaa käyttämällä graafis-analyyttisiä menetelmiä. Samoilla menetelmillä on mahdollista syntetisoida korjaavia laitteita, jotka vaimentavat itsevärähteleviä ja epävakaita jaksollisia moodeja epälineaarisissa järjestelmissä.
Synteesimenetelmiä kehitettiin edelleen maksimaalisen ja dynaamisen ohjelmoinnin periaatteiden pohjalta, kun määritetään tietyn laatukriteerin kannalta optimaalinen ohjauslaki, joka antaa järjestelmän laadun ylärajan, jonka tulee olla pyrittiin sitä suunnitellessaan. Tämän ongelman ratkaisu ei kuitenkaan käytännössä aina ole mahdollista järjestelmän fysikaalisten prosessien matemaattisen kuvauksen monimutkaisuuden, itse optimointiongelman ratkaisemisen mahdottomuuden ja löydetyn epälineaarisen ohjauslain teknisen toteutuksen vaikeuksien vuoksi. On huomattava, että monimutkaisten ohjauslakien toteuttaminen on mahdollista vain, kun digitaalinen tietokone on sisällytetty järjestelmäsilmukkaan. Äärimmäisten ja itsesäätyvien järjestelmien luominen liittyy myös analogisten tai digitaalisten tietokoneiden käyttöön.
Automaattisten ohjausjärjestelmien muodostus tapahtuu pääsääntöisesti analyyttisten analyysi- tai synteesimenetelmien perusteella. Ohjausjärjestelmien suunnittelun tässä vaiheessa laaditaan hyväksyttyjen oletusten perusteella järjestelmän matemaattinen malli ja valitaan sen alustava rakenne. Mallin tyypistä (lineaarinen tai epälineaarinen) riippuen valitaan laskentamenetelmä parametrien määrittämiseksi, jotka antavat määritellyt stabiilisuuden, tarkkuuden ja laadun indikaattorit. Tämän jälkeen matemaattista mallia jalostetaan ja välineitä käyttäen matemaattinen mallinnus määrittää järjestelmän dynaamiset prosessit. Eri tulosignaalien vaikutuksesta otetaan taajuusominaisuudet ja verrataan niitä laskettuihin. Sitten lopulta määritetään järjestelmän stabiilisuusmarginaalit vaiheessa ja moduulissa ja löydetään tärkeimmät laatuindikaattorit.
Lisäksi mallille tyypillisten ohjaustoimintojen asettaminen; poistaa tarkkuusominaisuudet. Matemaattisen mallinnuksen pohjalta laaditaan tekniset vaatimukset järjestelmälaitteistolle. Valmistetuista laitteista kootaan ohjain, joka siirretään puoliluonnolliseen mallinnukseen, jossa ohjausobjekti kerätään matemaattisen mallin muodossa.
HIL-mallinnuksen tuloksena saatujen ominaisuuksien mukaan tehdään päätös ohjaimen soveltuvuudesta työskennellä todellisen säätökohteen kanssa. Säätimen parametrien lopullinen valinta ja sen säätö tehdään luonnollisissa olosuhteissa ohjausjärjestelmän kokeellisen kehittämisen aikana.
Tila- ja z-muunnosten yhtälöihin, maksimiperiaatteeseen ja dynaamiseen ohjelmointimenetelmään perustuvan automaattisen ohjauksen teorian kehittäminen parantaa ohjausjärjestelmien suunnittelumenetelmää ja mahdollistaa erittäin tehokkaiden automaattisten järjestelmien luomisen eniten. eri toimialoilla Kansallinen talous. Tällä tavalla saadut automaattiset ohjausjärjestelmät varmistavat tuotteiden korkean laadun, alentavat niiden kustannuksia ja lisäävät työn tuottavuutta.
1. Yleinen osa.
1.1. Peruskonseptit
Järjestelmän tulomuunnos (ohjaustoiminto) lähtösignaaliin (säädettävä arvo) määrittää säännellyn arvon muutoslain. Halutun toteutuminen laki pannaan tämän seurauksena täytäntöön muodostus ohjausmuuttujat, jotka vaikuttavat ohjattuun järjestelmään. Säädellyn arvon muutoksen lait ajassa voivat olla erilaisia; matemaattisesti ne kuvataan järjestelmän ylläpitäjä. Tämä operaattori voi toteuttaa lähtösignaalin suhteellisen riippuvuuden tulosta, suhteen derivaatan tai integraalin muodossa jne. Yleisemmässä tapauksessa tämä operaattori voi olla myös epälineaarinen.
On huomattava, että koneiden ja yksiköiden ohjattujen arvojen muutoslakeja rikotaan ulkoisten ja joskus sisäisten vaikutusten, joita kutsutaan häiriöiksi, vaikutuksesta. (tai häiritseviä vaikutuksia). Näiden vaikutusten määrittelystä voidaan nähdä, että automaattisen ohjausjärjestelmän tulee toistaa ohjaustoiminto mahdollisimman tarkasti ja reagoida mahdollisimman vähän häiritsevään toimintaan.
On kolme eri periaate ohjausjärjestelmien rakentaminen, jotka varmistavat vaaditun muutoslain täytäntöönpanon ohjatussa muuttujassa: avoin silmukka, suljettu silmukka, yhdistetty silmukka asetus (suljettu-auki). Avoimen syklin periaate on varmistaa ohjatun muuttujan vaadittu muutoslaki suoraan muuttamalla ohjaustoimintoa. Suljetun syklin periaatteelle on ominaista ohjaustoiminnan vertailu sovelluksesta johtuvaan säädettävän muuttujan todelliseen muutokseen. palautetta ja vertailuelementti. Vertailusta johtuva virhesignaali ei saa ylittää tiettyä ennalta määrättyä arvoa. Tästä johtuen suljetuissa järjestelmissä varmistetaan säädettävän muuttujan vaadittu muutoslaki. Yhdistetty periaate koostuu suljetun ja avoimen silmukan yhdistämisestä yhdessä järjestelmässä.
Automaattinen ohjaus kutsutaan prosessiksi, jossa
toiminnot suoritetaan järjestelmällä, joka toimii ilman ihmisen väliintuloa ennalta määrätyn algoritmin mukaisesti.
Automaattinen järjestelmä, jossa on suljettu vaikutuspiiri, jossa ohjaus (säätely) syntyy vertaamalla ohjatun (säädettävän) suuren todellista arvoa sen annettuun (määrättyyn) arvoon, kutsutaan ns. ASR.
Valmistusprosessi- joukko toisiinsa liittyviä työ- ja teknologisia prosesseja, joiden toteutuksen aikana raaka-aineet ja puolivalmiit tuotteet muunnetaan valmiiksi tuotteiksi.
Automaattinen ovat laitteita, jotka ohjaavat erilaisia prosesseja ja hallitse niitä ilman suoraa ihmisen väliintuloa.
Tutkittavaa aihetta tai prosessia kutsutaan ns esine, ja kaikki ympäröivät esineet, jotka ovat vuorovaikutuksessa niiden kanssa - ulkoinen ympäristö.
Järjestelmä- joukko elementtejä tai laitteita, jotka ovat suhteissa ja yhteyksissä keskenään ja muodostavat tietyn eheyden (ykseyden).
Ohjausobjekti- joukko teknisiä laitteita (koneet, työkalut, mekanisointi), jotka suorittavat tämän prosessin hallinnan näkökulmasta.
Ohjaa toimintaa- huolehtii oikeaan aikaan työtoimintojen alkamisesta, järjestyksestä ja lopettamisesta, kohdistaa niiden toteuttamiseen tarvittavat resurssit.
Alla hallinta ymmärtää prosessin, jossa järjestetään sellainen määrätietoinen vaikutus ohjausobjektiin, jonka seurauksena jälkimmäinen menee vaadittuun (tarkoitukseen) tilaan.
Tuotantoprosessin tai prosessin tai prosessiobjektin parametreja, joita on jatkuvasti ylläpidettävä tai muutettava tietyn lain mukaan, kutsutaan ns. kontrolloitu määrä.
Ohjatun muuttujan arvoa, jonka tehtävän mukaan tulisi olla tiettynä ajankohtana, kutsutaan ohjatun muuttujan (ohjatun parametrin) annettu arvo.
Kutsutaan kaaviota, joka kuvaa laitteen tai järjestelmän prosessien järjestystä rakennekaavio.
Linkki- ACS:ään sisältyvä elementti, jossa tuloparametri muunnetaan tietyllä tavalla lähtöparametriksi (se on kaavamaisesti kuvattu lohkona, mutta ei heijasta sen suunnittelun piirteitä).
Tieto liittyy aina jonkin fyysisen suuren materiaalikantajaan. AT tekniset järjestelmät tällaisia kantoaaltoja kutsutaan signaalin kantajat(esim. sähköjännitteet ja -virta, paine, mekaaninen liike jne.), joita voidaan muuttaa lähetettyjen tietojen mukaan.
1.2. Alkuperäisen automaattisen ohjausjärjestelmän kuvaus.
Koska säädelty kohde on ACP:n elementti tai linkki, ACP:n ominaisuudet riippuvat ensisijaisesti säädellyn kohteen ominaisuuksista. Siksi, jotta voidaan luoda toimiva ACP, joka tarjoaa vaaditun laadun säätelyn, on ensinnäkin tarpeen tuntea säädeltävän kohteen ominaisuudet (spastinen ja dynaaminen).
Laboratorioosaston säätökohteena on kohde, jolla on hajautetut parametrit, koska ohjattu arvo (lämpötila) ei ole sama kohteen eri kohdissa tasapainotilassa ja siirtymätilassa.
Kohteen hitauden lisäämiseksi, jonka tulisi olla kymmenen kertaa suurempi kuin anturilla tässä esineessä mitattu, toimitetaan lastuilla täytetty metallikuppi, jossa lämpötila-anturi sijaitsee. Tämän avulla voit lisätä kohteen lämpötilavuutta.
Vaadittu lämpötila (referenssi) asetetaan säätölaitteen (t e) sisääntulossa olevalla laitteella.
Häiriö
Riisi. 1. Sääntelyjärjestelmä.
Laite t f muuntaa todellisen lämpötilan signaaliksi. Merkitään näiden laitteiden lähdössä olevat signaalit niitä vastaavilla kirjaimilla, ilmaistaan todellinen poikkeama vaaditusta signaalin muodossa: ∆t = t e - t f; kutsutaan poikkeamaksi tai epäsopivuudeksi. Säädin muuntaa ∆t tietyn ohjauslain mukaan ja käynnistää toimilaitteen. Meidän tapauksessamme säätäjän tehtävänä on häiriön B vaikutuksesta aiheutuvien poikkeamien ∆t likviditeetti, ts. ohjausobjektien erilaiset kuormitukset (ympäristön lämpötilan muutokset, portin asennon muutokset jne.).
Virhe ∆t voi tapahtua myös t e:n muutoksesta johtuen, mutta koska kyseessä on ennalta tiedossa oleva funktio, virhe voidaan myös laskea etukäteen ja kompensoida. Tällaista järjestelmää kutsutaan ohjelmaohjausjärjestelmäksi tai yksinkertaisesti ACS:ksi.
Jalustassa on kaksiasentoinen säätö. Tässä tapauksessa on tarpeen avata pelti, jotta sähköinen lämmityselementti puhaltaa jatkuvasti ilmaa. Lämpötilaa ohjataan kytkemällä lämmityselementti päälle tai pois päältä releelementillä.
Kohteen dynaamisten ominaisuuksien selvittämiseksi telineeseen asennetaan itsetallennuslaite, joka rekisteröi kohteen lämpötilan muutokset ja kiinnittää ne karttanauhalle.
Mikä tahansa tekninen yksikkö, joka on OR:n säätelyn kohteena, toimii vakaassa tilassa, jos siinä noudatetaan täysin materiaali- ja energiatasapainoa. Teknologisen prosessin kulkuolosuhteita kuvaava pääparametri (kohteessamme se on lämpötila) pysyy muuttumattomana vakaassa tilassa.
Lähtöarvon riippuvuutta tuloarvosta vakaassa tilassa kutsutaan TAI:n staattiseksi ominaispiirteeksi. Staattiset ominaisuudet voivat olla sekä lineaarisia, eri kaltevuuskertoimilla että epälineaarisia, kun taas useimmilla todellisilla objekteilla on yleensä epälineaarisia.
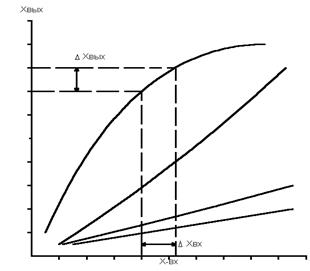
Kuva 1.1. OR:n staattiset ominaisuudet.
Nämä OR:n ominaisuudet mahdollistavat kohteen eri tulo- ja lähtöarvojen välisen yhteyden asteen arvioimisen.
Staattiset ominaisuudet määritetään laskennallisesti tai kokeellisesti.
Säädellyn kohteen dynaaminen ominaisuus kutsutaan lähtöarvon riippuvuudeksi tuloarvosta transienttitilassa.
Koska RR:n lähtöarvon muutokset eri häiriöissä voivat tapahtua eri tavoin, kohteen dynaamisten ominaisuuksien tutkimiseen käytetään yleensä tyypillisiä ulkoisia vaikutuksia.
Lämpötilan ACS-kiihtyvyyskäyrä (kuva 1.2.) osoittaa TAI:n dynaamiset ominaisuudet.
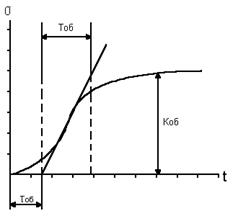
Kuva 1.2. Kiihtyvyyskäyrä
Kuvasta näkyy, että esineellä on kyky asteittain pysäyttää lähtöarvon poikkeama alkuarvosta ja tasapainotila palautuu uudelleen, ts. objektilla on itsekohdistusominaisuus. Tällaisia objekteja kutsutaan staattisiksi.
Objektilla on viive T noin ja siitä lähtien Sillä ei ole merkitystä ja se jätetään huomiotta seuraavassa.
Objektin T about aikavakio on ehdollinen aika, jonka aikana lähtöarvo muuttuisi alkuperäisestä arvosta uuteen vakaan tilan arvoon, jos tämä muutos tapahtuisi nopeudella, joka on vakio ja suurin tietylle transientille. Aikavakio kuvaa kohteen inertiaa, joka ymmärretään sen kyvynä hitaasti kerääntyä ja kuluttaa ainetta ja energiaa, mikä tulee mahdolliseksi TAI:ssa olevien vastusten ja kapasitanssien vuoksi, jotka estävät niiden sisään- ja ulostulon.
Siirtokerroin K noin TAI on muutos kohteen lähtöarvossa siirtymisen aikana alkuperäisestä uuteen vakaaseen tilaan, viitataan yksittäiseen häiriöön tulossa.
Yksittäinen häiriö katsotaan yhden prosentin muutokseksi kohteen syöttöarvossa (sääntelyelimen siirtymä).
Tällä tavalla:

missä x o on lähtömäärän arvo alkuperäisessä vakaassa tilassa; X(∞)– myös, mutta uuteen vakaaseen tilaan; ∆Х sisään on tuodun häiriön suuruus; säätimen iskuprosentti.
1.3. ACS:n toimintakaavion kehittäminen.
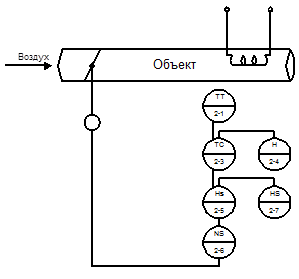
Kuva 2. Kolmiasentoinen ohjaussilmukka.
Säätökohde on ominaisuuksiltaan staattinen itsekohdistuksen kanssa siirtoviiveellä, mikä vaikutti suhteellisuusintegraaliohjaimen valintaan.
Piiri sisältää jäähdytysnesteen lämpötilan mittauksen ja vertailun tehtävään, säädin HS - manuaalisen ohjausyksikön kautta kytkee päälle koskettimen "enemmän" tai "vähemmän" kontaktittoman käynnistimen NS, joka puolestaan ohjaa toimilaitetta, ts. ilmansyöttö jäähdytysnesteeseen.
Kaksiasentoisella säädöllä releelementti säätelee jäähdytysnesteen lisäämistä.
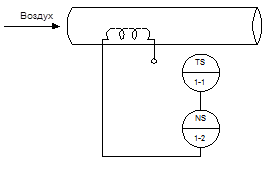
Kuva 3. Kaksiasentoinen ohjaussilmukka.
Kun tietty lämpötila saavutetaan, käynnistin katkaisee sähköisen lämmityselementin jännitteen. Lämpötilan mittaus ja säätö suoritetaan dynamometrisellä anturilla - lämpötilareleellä.
2. Selvitysosa.
2.1. Yksisilmukaisen ACS:n parametrinen synteesi ja analyysi.
Automaattisten ohjausjärjestelmien analyysi sähköautomaattielementeillä suoritetaan käyttämällä Gaussin ja Hurwitzin algebrallisia kriteerejä, Lyapunov-kriteeriä, Mikhailovin, Nyquistin - Mikhailovin taajuuskriteerejä jne.
ACS:ää analysoitaessa tutkitaan stabiilisuuskysymyksiä ja muita avoimen ja suljetun ACS:n kvalitatiivisia indikaattoreita, löydetään stabiilisuusmarginaalit moduulissa ja vaiheessa, määritetään suljettujen järjestelmien astatismia, servojärjestelmien virheprosentteja jne.
Järjestelmän tärkeimmät laadulliset indikaattorit, jotka määritetään niin sanottujen h-funktioiden löytämisen jälkeen, ovat seuraavat:
1. Transienttiprosessin aika t p, jonka jälkeen ohjattu arvo pysyy lähellä vakaata arvoa;
2. Säädettävän muuttujan tasainen arvo h¥=limh(t)=h y ;
3. Suurin ylitys y=(h max -h y)/h y (tässä h max on ensimmäisen maksimin arvo);
4. Värähtelytaajuus w=2p/T (tässä T on värähtelyjakso);
5. Transienttiprosessin n värähtelyjen lukumäärä;
6. Aika saavuttaa ensimmäinen maksimi t max ;
Tärkeä ACS:n laadun indikaattori on niiden luotettavuus. Laadulliset indikaattorit määritetään ratkaisemalla differentiaaliyhtälöt, jotka kuvaavat jo tunnettuja ACS-rakenteita.
ACS:n synteesi koostuu sen rakenteiden ja parametrien löytämisestä, jotka täyttäisivät annetut laatuindikaattorit. Synteesi on vaikeampi tehtävä kuin analyysi. Pääasialliset menetelmät ACS:n synteesissä ovat analyyttinen, graafis-analyyttinen ja koneellinen (tietokoneiden avulla).
2.1.1. Staattisen säätelyn mahdollisuuden arviointi.
Säädintä valittaessa on tiedettävä numeeriset dynaamiset tiedot säätöobjektista, ts. K0; T noin; t 0, jonka määritämme kiihtyvyyskäyrän perusteella.
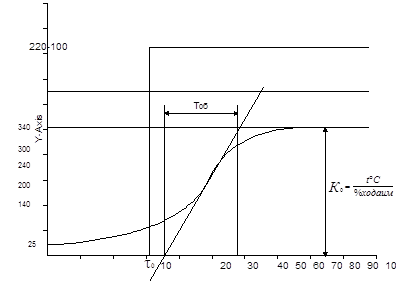
Kuva 4. Laboratoriotelineen ACS-lämpötilan kiihtyvyyskäyrä.
Säätimen tyyppi valitaan alustavasti suhteessa t/T about;
Kriteerit sääntelijöiden valitsemiseksi toiminnan tyypin mukaan.
ASR:n rakennekaavion tutkimiseksi ja laskemiseksi vastaavien muunnosten avulla on tarpeen pelkistää se olioregulaattorin yksinkertaisimpaan standardimuotoon. Tämä on välttämätöntä ensinnäkin sen siirtofunktioiden ja siten järjestelmän transienttiprosessien määrittävien matemaattisten riippuvuuksien määrittämiseksi, ja toiseksi yleensä kaikki tekniset menetelmät säätimien asetusten laskemiseksi ja määrittämiseksi ovat sovelletaan tällaisiin vakiorakenteisiin.
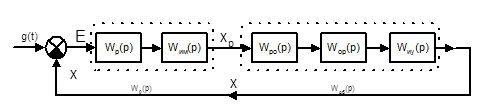
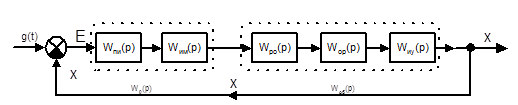
Joten lämpötila-ACS:n alkuperäinen lohkokaavio tyypillisen toimintakaavion mukaisesti (katso piirustukset) voidaan esittää kuvan osoittamalla tavalla.
Missä W P (p), W IM (p), W PO (p), W OP (p), W IU (p) ovat vastaavasti ohjaimen, toimilaitteen, säätelyelimen, ohjausobjektin ja mittauslaitteen siirtotoimintoja. .
Rakennekaaviossa kaikki vaikutukset (signaalit) tulee ilmoittaa Laplace-muunnetussa muodossa.
Kuva 5. ACS:n muunnettu lohkokaavio (t).
Kaikki linkit, jotka määrittävät kohteen liitäntäsolmujen dynaamiset ominaisuudet (liitännät, liitännät) säätimen kanssa (esim. sääntelyelimet, tietoliikennelinjat, mittauslaitteet, anturit jne.), on yleensä suositeltavaa viitata sääntelyn kohteeseen.
Jos säädin ja toimilaite toteuttavat suoraan ohjauslakia järjestelmässä, niin säätimen siirtotoiminto
W P (p) \u003d W y (p) W IM (p)
Staattiselle säätelylle on siis tunnusomaista P-säätimen läsnäolo
W P (p) \u003d K reg
Arvoja optimoitaessa kokeellisten tietojen mukaan on suositeltavaa ottaa K - säätimen kerroin K = 10
Säännellyn kohteen siirtofunktio, ottaen huomioon itse objektiin liittyvät linkit, on muotoa:
W noin (p) \u003d W PO (p) W OP (p) W IU (p)
Yleisesti ottaen mikä tahansa yksiulotteinen ACS, jolla on pääpalaute, voidaan linkkejä asteittain vahvistamalla pelkistää yksinkertaisimpaan muotoon, avoimen järjestelmän siirtofunktioon, joka
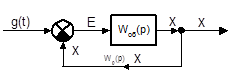 W(p)=W P (p)*W OB (p)
W(p)=W P (p)*W OB (p)
Lämpötilan ACS-kiihtyvyyskäyrä osoittaa, että kohde on inertiaalinen, staattinen ja siinä on viive, koska viive on merkityksetön. Jatkotutkimuksessa ne voidaan jättää huomiotta. Sitten kohteen siirtofunktio näyttää tältä:
W noin (p) \u003d K noin / (T noin p + 1)
Avoimen järjestelmän siirtotoiminto
W(p)=W P (p)*W OB (p)
 - Staattisella säädöllä.
- Staattisella säädöllä.
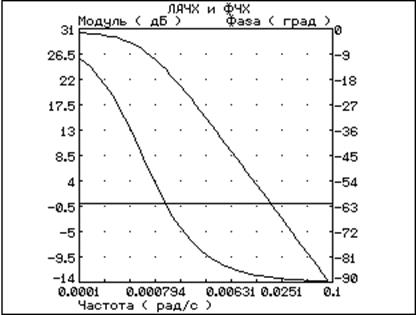
Kuva 6. Objektin LAFC ja LFC.
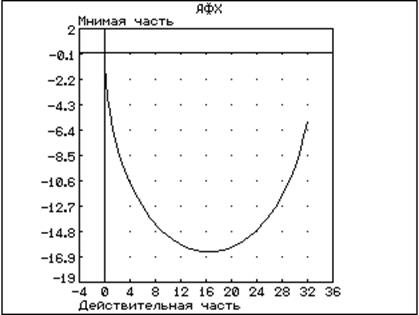
Kuva 7. Objektin AFC.
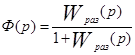
Etsitään suljetun järjestelmän siirtofunktio:
Koska aikavakioiden arvo määritetään suunnitteluominaisuuksia järjestelmän elementtejä, ohjausjärjestelmän säätö tapahtuu vain muuttamalla sen kerrointa K vaikuttamalla säätimen siirtokertoimeen K p.
Järjestelmän stabiilisuuden määrittämiseksi rakennamme amplitudi-taajuus-, vaihe-taajuus-ominaisuudet logaritmisella asteikolla ja rakennamme hodografin suljetun järjestelmän avulla.
![]()
Kuva 8. LAHCH ja LPCH staattisella säädöllä.
Kuva 9. Suljetun järjestelmän amplitudi-vaiheominaisuus.
Kaavioiden mukaan näemme, että säätimen kertoimella K p = 10 vakausmarginaali täyttyy, koska katkaisutaajuudella wav vaihe on alle 180°, mikä luonnehtii järjestelmän stabiilisuutta staattisen ohjauksen alaisena, mikä tarkoittaa, että lämpötila-ACS:lle on mahdollista käyttää P-säädintä.
2.1.2. Astaattisen säätelyn mahdollisuuden arviointi.
Yksi astaattisen linkin (tai koko järjestelmän) merkkejä on kompleksisen muuttujan P läsnäolo tekijänä siirtofunktion nimittäjässä, ts. integroivan komponentin läsnäolo.
Tarkastellaan PI-lain mahdollisuutta lämpötilan ACS-säädölle. Tätä varten rakennamme lohkokaavion, johon sisällytämme PI-ohjaimen.
Kuva 10. Rakennesuunnitelma SAR-lämpötila.
PI-säätimen siirtofunktiolla on muoto
WP (p) = K+1/Tp; (K = 20; Tu = 25 s.)
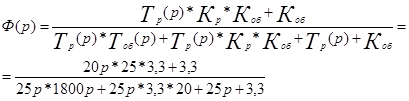
Etsitään avoimen järjestelmän siirtofunktio
W kertaa (p) \u003d W p (p) W noin (p)
Etsi suljetun järjestelmän siirtofunktio
Avoimen järjestelmän siirtofunktion perusteella rakennamme LFC:n ja LFC:n ja suljetun järjestelmän funktion AFC:n.
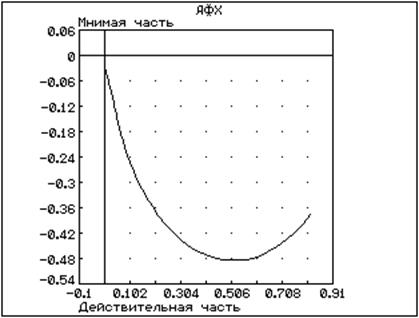
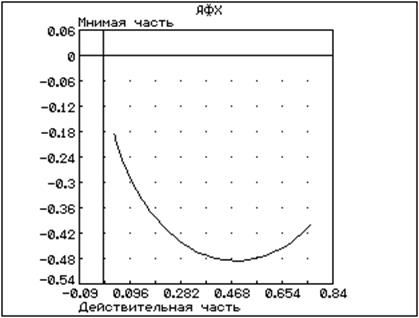
Kuva 11. Suljetun järjestelmän amplitudi-vaiheominaisuus.
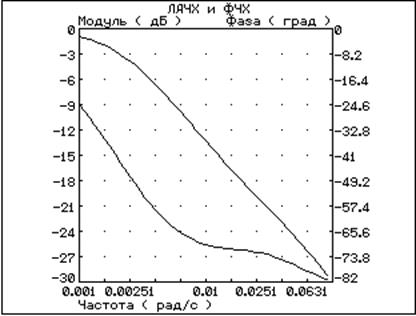
Kuva 12. LAFC ja LPFC astaattisella säädöllä.
Taajuusominaisuudet osoittavat, että järjestelmällä on stabiilisuusmarginaali sekä amplitudin että vaiheen suhteen rajataajuudella w avg vaihe< 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Yksipiirisen automaattisen ohjausjärjestelmän laadun selvittäminen.
Vastaanottaja automaattiset järjestelmät sääntely ei aseta vaatimuksia vain sen kestävyydelle. Järjestelmän suorituskyvyn kannalta on vähintäänkin välttämätöntä, että automaattinen ohjaus tapahtuu tietyillä laatuindikaattoreilla.
Vaatimukset sääntelyprosessin laadulle voivat kussakin tapauksessa olla hyvin erilaisia, mutta kaikista laatuindikaattoreista voidaan erottaa useita merkittävimpiä, jotka määrittävät lähes kaikkien AKT-maiden laadun riittävän täydellisesti.
Järjestelmän säätelyprosessin laatua arvioidaan pääsääntöisesti sen siirtymätoiminnolla.
Tärkeimmät laatuindikaattorit ovat: - säätöaika t p - on aika, jonka aikana järjestelmään kohdistuvasta vaikutuksesta lähtien ohjatun arvon Dh(t) poikkeamat sen vakaan tilan arvosta h 0 =h( ¥) on pienempi kuin esiasetettu arvo E Yleensä oletetaan, että kun säätöaika on kulunut, säädetyn arvon poikkeama vakaan tilan arvosta ei saa olla enempää kuin E = 5 %. Siten säätöaika määrää transienttiprosessin keston (nopeuden).
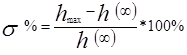
Ylitys s on säädetyn muuttujan suurin poikkeama Dh max vakioarvosta ilmaistuna prosentteina h 0 =h(¥).
Dh max:n itseisarvo määritetään transienttikäyrästä:
Dh max \u003d h max - h (¥)
Vastaavasti ylitys on yhtä suuri kuin:
Järjestelmän värähtelylle on tunnusomaista säädetyn arvon värähtelyjen määrä säätöajan t p aikana. Jos tämän ajan kuluessa järjestelmän transienttiprosessi tekee värähtelyjen lukumäärästä määritettyä pienemmäksi, niin katsotaan, että järjestelmällä on värähtelynsä suhteen vaadittu säätölaatu;
Tasainen virhe E. Ohjatun muuttujan h 0 tasainen arvo transienttiprosessin lopussa riippuu järjestelmän astaattisuudesta n. AT staattiset järjestelmät(n=0) – vakaan tilan virhe at vakioarvo syöttötoiminto ei ole yhtä suuri kuin 0 ja siksi säädettävän muuttujan h 0 vakaa arvo eroaa sen asetetusta arvosta vakaan tilan virheen arvon verran.
Häiritsevän vaikutuksen kanavalle virhearvo määräytyy lausekkeen avulla
![]()
jossa x 0 on vakio käyttövoima; K on järjestelmän siirtokerroin.
Häiritsevän vaikutuksen kanavan kautta lausekkeen mukainen virhearvo
jossa f 0 on jatkuva häiritsevä toiminta; K about - säädellyn kohteen siirtokerroin; K p - säätimen siirtokerroin.
Vertailemalla staattisen ja astaattisen ohjauksen transienttitoimintoja, valitsemme optimaalisen säätimen lämpötila-ACS:lle.
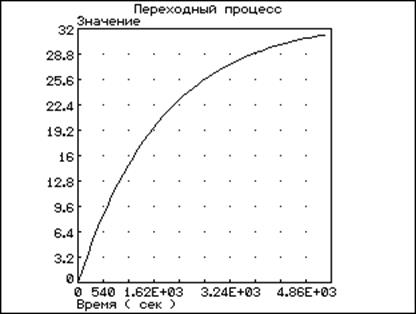
Kuva 13. ACS:n transienttitoiminto P-säätimellä
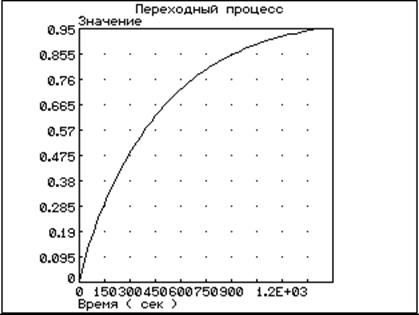
Kuva 14. ACS-transienttitoiminto PI-säätimellä
Kaaviot osoittavat, että säätöaika PI-säätimellä on lyhyempi kuin P-säätimellä; Se tarkoittaa, että lämpötila-ACS:ssä on tarkoituksenmukaista käyttää pulssiohjainta, joka täyttää PI-säätelylain.
Laskennassa käytettiin Classic-ohjelmaa tietokoneella.
3. Säätösilmukkamallin kehittäminen tietylle parametrille.
Kaaviot on tehty standardin GOST 2.710-81 mukaisesti.
Kuva 15. Kolmiasentoinen ohjaussilmukka.
Virransyöttö laboratoriotelineeseen tapahtuu automaattisella SF1-virtalähteellä nro 003E3. Tässä tapauksessa ohjausobjektin lämmityselementti kytketään päälle avauskoskettimen KM 1.1 kautta. rele KM 1 ja toissijainen ilmaisulaite KSU 4. Yleiskytkimen SA1 90° asennossa puhaltimen moottori. Asennossa -45° kytkin SA1, sisältyy asentosäätöön, asennossa +45° - kolmiasentoinen säätö.
2-asentoisessa säädössä KM1-relekäämitys kytketään päälle TUDE1-anturin avauskoskettimen kautta. Kun anturin asetettu lämpötila ylittyy, sen kosketin avautuu ja avaa KM1.1-koskettimen sammuttaen lämmityselementin, mikä ilmaistaan HL4-merkkivalolla.
Kolmiasentoinen säätö on esitetty kaaviossa nro 004E2. Automaattisessa tilassa sähköinen signaali TSMU-lämpömuuntimesta syötetään peräkkäin ensin KSU4(2)-laitteen tuloon, liittimeen 12 ja liittimen 11 kautta RBI 1-P -ohjausyksikön tuloon 25.
Asettuun lämpötila-arvoon verrannollinen virtasignaali syötetään myös RBI 1-P -liittimen 21 tuloon RZD-setteristä.
Säätimen lähdössä liittimet 7 ja 9 antavat signaalin "vähemmän" ja "enemmän" suhteessa puristimen 10 keskipisteeseen. Signaali kulkee BRU:n ja IM:n avauskoskettimien SQ1 ja SQ2 kautta. toimilaite, joka ohjaa FBR-käynnistintä, liittimet 7 ja 9. FBR kytkee päälle pikaviestikontaktit 1, 2 ja 3.
Manuaalisessa ohjaustilassa pikaviesti kulkee BRU-painikkeilla "Lisää" tai "Vähemmän".
Johtopäätös
Objektin laskennalle järjestelmälle tehtiin seuraavat laskelmat:
Automaattisen ohjauksen toimintakaavion kehittäminen. Saadaan ohjausobjektikaavion siirtofunktio ja rakennemuunnos. Ohjausobjektin taajuusominaisuudet rakennetaan. Arvioitiin staattisen ohjausobjektin (P-ohjain) kyvyt sekä arvio astaattisen ohjausobjektin (PI-säädin) mahdollisuudesta. Yksisilmukaisen automaattisen ohjausjärjestelmän laadusta tehtiin tutkimus.
Korjatun järjestelmän haluttujen taajuusominaisuuksien rakentaminen on saatu päätökseen. Korjauslaitteen valinta ja laskenta suoritetaan. Säädetyn järjestelmän laatu arvioitiin.
Tietyn parametrin ohjaussilmukkamallin kehittäminen on saatu päätökseen.
Laskelmien perusteella voidaan sanoa, että korjauslaitteen valinta on tehty oikein ja täyttää järjestelmän laatuindikaattorit tehdyllä korjauksella.
Bibliografia.
- I.Yu. Topchev "Atlas CAP Designille"
- B.C. Chistyakov "Lyhyt opas lämpöteknisiin mittauksiin"
- N.N. Ivaštšenko" Automaattinen säätö»
4. V.V. Cherenkov "Teolliset laitteet ja automaatiovälineet"





