Ang mga ito ay pangunahing tinutukoy sa pamamagitan ng paraan ng pag-ikot ng paggulo ay naka-on. Depende dito, ang mga de-koryenteng motor ay nakikilala:
1. na may independiyenteng pagpapasigla: ang paikot-ikot na paggulo ay pinapagana ng isang panlabas na pinagmulan direktang kasalukuyang(exciter o rectifier),
2. Sa parallel excitation : ang field winding ay konektado sa parallel sa armature winding,
3. : ang field winding ay konektado sa serye sa armature winding,
4. may halong excitement: mayroon itong dalawang paikot-ikot na paggulo, ang isa ay konektado sa parallel sa armature winding at ang isa ay sunod-sunod dito.
Ang lahat ng mga de-koryenteng motor na ito ay may parehong aparato at naiiba lamang sa pagpapatupad ng paikot-ikot na paggulo. Ang mga paikot-ikot na paggulo ng mga de-koryenteng motor na ito ay ginagawa sa parehong paraan tulad ng para sa.
de-kuryenteng motor direktang kasalukuyang na may independiyenteng pagpapasigla
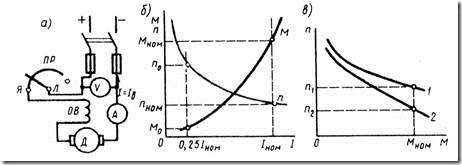
Sa electric motor na ito (Larawan 1, a), ang armature winding ay konektado sa pangunahing DC source (DC network, generator o rectifier) na may boltahe U, at ang excitation winding ay konektado sa isang auxiliary source na may boltahe UB. Ang control rheostat Rrv ay kasama sa excitation winding circuit, at ang panimulang rheostat Rn ay kasama sa armature winding circuit.
Ang adjusting rheostat ay ginagamit para i-regulate ang rotational speed ng motor armature, at ang panimulang rheostat ay ginagamit para limitahan ang current sa armature winding sa panahon ng start-up. katangian na tampok electric motor ay ang kasalukuyang paggulo nito Iv ay hindi nakasalalay sa kasalukuyang Ii sa armature winding (load current). Samakatuwid, ang pagpapabaya sa demagnetizing effect ng armature reaction, maaari nating ipagpalagay na ang motor flux Ф ay hindi nakasalalay sa pagkarga. Ang mga dependences ng electromagnetic torque M at rotational speed n sa kasalukuyang Il ay magiging linear (Fig. 2, a). Dahil dito, ang mekanikal na katangian ng makina ay magiging linear din - dependence n (M) (Larawan 2, b).
Sa kawalan ng isang rheostat na may resistensya Rn sa armature circuit, ang bilis at mekanikal na mga katangian ay magiging matibay, i.e. na may isang maliit na anggulo ng pagkahilig sa pahalang na axis, dahil ang boltahe ay bumaba IаΣRя sa mga windings ng makina na kasama sa armature circuit sa 3-5% lang ng Unom ang rated load. Ang mga katangiang ito (mga tuwid na linya 1 sa Fig. 2, a at b) ay tinatawag na natural. Kapag ang isang rheostat na may resistensya Rn ay kasama sa armature circuit, ang slope ng mga katangiang ito ay tumataas, bilang isang resulta kung saan posible na makakuha ng isang pamilya ng mga rheostat na katangian 2, 3 at 4, na tumutugma sa iba't ibang kahulugan Rn1, Rn2 at Rn3.
kanin. 1. Mga diagram ng eskematiko ng mga de-kuryenteng motor direktang kasalukuyang na may independiyenteng (a) at parallel (b) paggulo
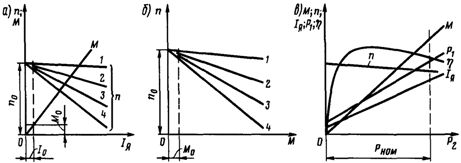
kanin. 2. Mga katangian ng mga de-kuryenteng motor direktang kasalukuyang na may independiyente at parallel na paggulo: a - high-speed at metalikang kuwintas, b - mekanikal, c - gumagana mas lumalaban Rn, mas malaki ang anggulo ng inclination na mayroon ang rheostatic na katangian, ibig sabihin, mas malambot ito.
Ang pagsasaayos ng rheostat Rpv ay nagbibigay-daan sa iyo na baguhin ang motor excitation current Ib at ang magnetic flux nito Ф. Sa kasong ito, magbabago din ang rotational speed n.
Walang mga switch at fuse na naka-install sa excitation winding circuit, dahil kapag nasira ang circuit na ito, ang magnetic flux ng electric motor ay bumababa nang husto (tanging ang flux mula sa natitirang magnetism ang nananatili dito) at isang emergency mode ang nangyayari. Kung ang de-koryenteng motor ay tumatakbo nang walang ginagawa o may maliit na pagkarga sa baras, ang bilis ay tumataas nang husto (ang makina ay tumatakbo nang ligaw). Sa kasong ito, ang kasalukuyang sa armature winding Ia ay tumataas nang husto at maaaring magkaroon ng all-round fire. Upang maiwasan ito, dapat idiskonekta ng proteksyon ang motor mula sa pinagmumulan ng kuryente.
Ang isang matalim na pagtaas sa bilis ng pag-ikot kapag nasira ang circuit ng paikot-ikot na paggulo ay ipinaliwanag sa pamamagitan ng ang katunayan na sa kasong ito ang magnetic flux Ф ay bumababa nang husto (sa halaga ng Fost flux mula sa natitirang magnetism) at e. d.s. E at tumataas ang kasalukuyang Iya. At dahil ang inilapat na boltahe U ay nananatiling hindi nagbabago, ang bilis ng pag-ikot n ay tataas hanggang e. d.s. Ang E ay hindi maaabot ang isang halaga na humigit-kumulang katumbas ng U (na kinakailangan para sa estado ng equilibrium de-koryenteng circuit mga anchor, kung saan ang E= U - IаΣRя.
Kapag ang pagkarga sa baras ay malapit sa nominal, ang de-koryenteng motor ay titigil kung sakaling masira ang circuit ng paggulo, dahil electromagnetic na sandali, na maaaring bumuo ng motor na may makabuluhang pagbaba sa magnetic flux, bumababa at nagiging mas mababa kaysa sa sandali ng pagkarga sa baras. Sa kasong ito, ang kasalukuyang Ia ay tumataas din nang husto, at ang makina ay dapat na idiskonekta mula sa pinagmumulan ng kapangyarihan.
Dapat pansinin na ang bilis ng pag-ikot n0 ay tumutugma sa perpektong idling, kapag ang makina ay hindi kumonsumo ng elektrikal na enerhiya mula sa network at ang electromagnetic torque nito ay zero. Sa totoong mga kondisyon, sa idling mode, ginagamit ng motor ang kasalukuyang I0 mula sa network, na kinakailangan upang mabayaran panloob na pagkalugi kapangyarihan, at bumuo ng isang tiyak na sandali na kinakailangan ng M0 upang madaig ang mga puwersa ng friction sa makina. Samakatuwid, sa katotohanan, ang idle speed ay mas mababa sa n0.
Ang pag-asa ng bilis ng pag-ikot n at ang electromagnetic torque M sa kapangyarihan P2 (Larawan 2, c) sa baras ng motor, tulad ng sumusunod mula sa isinasaalang-alang na mga relasyon, ay linear. Ang mga dependences ng armature winding current Iya at power P1 sa P2 ay halos linear din. Ang kasalukuyang Ia at ang power P1 sa P2 = 0 ay ang walang-load na kasalukuyang I0 at ang power P0 na natupok habang walang load. Ang kurba ng kahusayan ay may katangiang karaniwan sa lahat ng mga de-koryenteng makina.
de-kuryenteng motor direktang kasalukuyang may parallel excitation
Sa de-koryenteng motor na ito (tingnan ang Fig. 1, b), ang field at armature windings ay pinapagana mula sa parehong pinagmumulan ng elektrikal na enerhiya na may boltahe U. Ang control rheostat Rpv ay kasama sa excitation winding circuit, at ang panimulang rheostat Rp ay kasama sa armature winding circuit.
Sa de-koryenteng motor na isinasaalang-alang, mahalagang, magkahiwalay na pagkain circuits ng armature at excitation windings, bilang isang resulta kung saan ang paggulo kasalukuyang Iv ay hindi nakasalalay sa kasalukuyang ng armature winding Iv. Samakatuwid, ang isang parallel-excited na motor ay magkakaroon ng parehong mga katangian bilang isang independently-excited na motor. Gayunpaman, ang isang parallel-excited na motor ay gumagana lamang nang maayos kapag pinapatakbo ng isang palaging boltahe na pinagmumulan ng DC.
Kapag ang de-koryenteng motor ay pinapagana mula sa isang pinagmulan na may variable na boltahe (generator o kinokontrol na rectifier), ang pagbaba sa supply boltahe U ay nagdudulot ng katumbas na pagbaba sa kasalukuyang paggulo Iv at magnetic flux F, na humahantong sa pagtaas ng armature winding kasalukuyang Ia. Nililimitahan nito ang kakayahang kontrolin ang bilis ng armature sa pamamagitan ng pagpapalit ng boltahe ng supply U. Samakatuwid, ang mga de-koryenteng motor na idinisenyo upang paandarin ng generator o isang kinokontrol na rectifier ay dapat na malayang nasasabik.
de-kuryenteng motor direktang kasalukuyang na may sunud-sunod na paggulo
Upang limitahan ang kasalukuyang sa start-up, ang panimulang rheostat Rp ay kasama sa armature winding circuit (Fig. 3, a), at para makontrol ang bilis, ang isang adjusting rheostat Rrv ay maaaring ikonekta kasabay ng excitation winding.
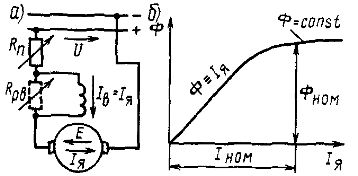
kanin. 3. Schematic diagram ng electric motor direktang kasalukuyang na may serial excitation (a) at ang pag-asa ng magnetic flux nito Ф sa kasalukuyang Iа sa armature winding (b)
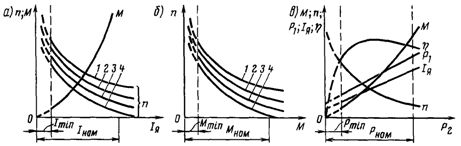
kanin. 4. Mga katangian ng motor na de koryente direktang kasalukuyang na may sunud-sunod na paggulo: a - high-speed at metalikang kuwintas, b - mekanikal, c - manggagawa.
Ang isang katangian ng de-koryenteng motor na ito ay ang kasalukuyang excitation Iv nito ay katumbas o proporsyonal (kapag ang rheostat Rpv ay naka-on) sa armature winding current Ia, samakatuwid ang magnetic flux Ф ay nakasalalay sa pagkarga ng motor (Larawan 3, b ).
Sa armature winding current I, mas mababa (0.8-0.9) kasalukuyang na-rate Inom ang magnetic system ng makina ay hindi puspos at maaari nating ipagpalagay na ang magnetic flux Ф ay nagbabago sa direktang proporsyon sa kasalukuyang Iа. Samakatuwid, ang bilis na katangian ng motor na de koryente ay magiging malambot - na may pagtaas sa kasalukuyang, Ith ang dalas ng pag-ikot n ay bumababa nang husto (Larawan 4, a). Ang pagbaba sa bilis ng pag-ikot n ay nangyayari dahil sa pagtaas ng pagbaba ng boltahe IяΣRя. sa panloob na pagtutol Rya. armature winding circuits, gayundin dahil sa pagtaas ng magnetic flux F.
Ang electromagnetic moment M na may pagtaas sa kasalukuyang Ia ay tataas nang husto, dahil sa kasong ito ang magnetic flux F ay tumataas din, ibig sabihin, ang sandaling M ay magiging proporsyonal sa kasalukuyang Ia. Samakatuwid, sa kasalukuyang Ia na mas mababa sa (0.8 N-0.9) Inom, ang katangian ng bilis ay may anyo ng isang hyperbola, at ang katangian ng sandali ay may anyo ng isang parabola.
Sa mga alon Il > Inom, ang mga dependence ng M at n sa Il ay linear, dahil sa mode na ito ang magnetic circuit ay magiging puspos at ang magnetic flux Ф ay hindi magbabago kapag nagbago ang kasalukuyang Il.
Ang mekanikal na katangian, ibig sabihin, ang pag-asa ng n sa M (Larawan 4, b), ay maaaring itayo batay sa mga dependences ng n at M sa Ib. Bilang karagdagan sa natural na katangian 1, posibleng makakuha ng pamilya ng mga katangian ng rheostat 2, 3 at 4 sa pamamagitan ng pagsasama ng isang rheostat na may resistensyang Rp sa armature winding circuit. Ang mga katangiang ito ay tumutugma sa iba't ibang halaga ng Rn1, Rn2 at Rn3, habang mas malaki ang Rn, mas mababa ang katangian.
Ang mekanikal na katangian ng itinuturing na makina ay malambot at may hyperbolic na karakter. Sa mababang pag-load, ang magnetic flux Ф ay bumababa nang husto, ang bilis ng pag-ikot n ay tumataas nang husto at maaaring lumampas sa maximum na pinahihintulutang halaga (ang makina ay naubusan ng gear). Samakatuwid, ang mga naturang makina ay hindi maaaring gamitin upang himukin ang mga mekanismo na tumatakbo sa idle mode at sa mababang pagkarga (iba't ibang mga kagamitan sa makina, conveyor, atbp.).
Karaniwang minimal pinahihintulutang pagkarga para sa mga motor na malaki at katamtamang kapangyarihan ay (0.2 .... 0.25) Inom. Upang maiwasan ang pagtakbo ng makina nang walang pag-load, ito ay mahigpit na konektado sa mekanismo ng drive (gear o blind clutch), ang paggamit ng belt drive o friction clutch ay hindi katanggap-tanggap.
Sa kabila ng disbentaha na ito, ang mga series-excited na motor ay malawakang ginagamit, lalo na kung saan may malawak na pagbabago sa load torque at mahirap na mga kondisyon sa pagsisimula: sa lahat ng traction drive (electric locomotives, diesel locomotives, electric trains, electric cars, electric forklifts, atbp.), pati na rin sa mga drive ng load-lifting mechanism (cranes, elevators, atbp.).
Ito ay ipinaliwanag sa pamamagitan ng ang katunayan na may isang malambot na katangian, ang isang pagtaas sa load torque ay humahantong sa isang mas maliit na pagtaas sa kasalukuyang at pagkonsumo ng kuryente kaysa sa mga motor na may independiyente at parallel na paggulo, samakatuwid ang mga motor na may serye ng paggulo ay mas pinahihintulutan ang labis na karga. Bilang karagdagan, ang mga motor na ito ay may malaking panimulang torque kaysa sa mga motor na may parallel at independiyenteng paggulo, dahil sa pagtaas ng armature winding current sa pagsisimula, ang magnetic flux ay tumataas din nang naaayon.
Kung tatanggapin natin, halimbawa, na ang panandaliang panimulang kasalukuyang ay maaaring 2 beses ang rate ng operating kasalukuyang ng makina, at napapabayaan ang epekto ng saturation, ang armature reaksyon at ang pagbaba ng boltahe sa circuit ng paikot-ikot nito, pagkatapos ay sa isang motor na may serye ng paggulo, ang panimulang metalikang kuwintas ay magiging 4 na beses na mas malaki kaysa sa nominal (sa Parehong kasalukuyang at magnetic flux na pagtaas ng 2 beses), at sa mga makina na may independiyente at parallel na paggulo - 2 beses lamang.
Sa katotohanan, dahil sa saturation ng magnetic circuit, ang magnetic flux ay hindi tumataas sa proporsyon sa kasalukuyang, ngunit pa rin ang panimulang metalikang kuwintas ng isang motor na may serye ng paggulo, lahat ng iba pang mga bagay ay pantay, ay magiging mas malaki kaysa sa panimulang metalikang kuwintas. ng parehong motor na may independiyente o parallel na paggulo.
Ang mga dependences ng n at M sa power P2 sa motor shaft (Fig. 4, c), tulad ng mga sumusunod mula sa mga probisyon sa itaas, ay hindi linear, ang mga dependences ng P1, Ip at η sa P2 ay may parehong hugis tulad ng para sa mga motor na may parallel excitation.
de-kuryenteng motor direktang kasalukuyang may halong excitement
Sa de-koryenteng motor na ito (Larawan 5, a), ang magnetic flux Ф ay nilikha bilang isang resulta ng magkasanib na pagkilos ng dalawang windings ng paggulo - parallel (o independyente) at serye, kung saan ang mga alon ng paggulo Iv1 at Iv2 \u003d Ib
kaya lang
![]()
kung saan ang Фposl ay ang magnetic flux ng series winding, depende sa kasalukuyang Il, ang Фpar ay ang magnetic flux ng parallel winding, na hindi nakadepende sa load (tinutukoy ng excitation current Iв1).
Ang mekanikal na katangian ng isang de-koryenteng motor na may halo-halong paggulo (Larawan 5, b) ay matatagpuan sa pagitan ng mga katangian ng mga makina na may parallel (tuwid na linya 1) at serye (curve 2) na paggulo. Depende sa ratio ng magnetomotive forces ng parallel at series windings sa nominal mode, posible na tantiyahin ang mga katangian ng isang motor na may halo-halong paggulo sa katangian 1 (curve 3 na may mababang ppm ng series winding) o sa katangian. 2 (curve 4 para sa isang maliit na ppm). na may parallel winding).
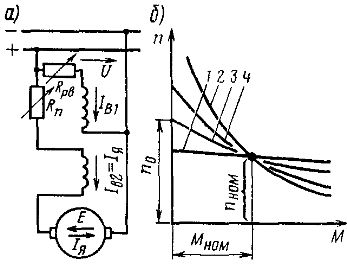
kanin. 5. Schematic diagram ng isang de-koryenteng motor na may halo-halong paggulo (a) at mga mekanikal na katangian nito (b)
Ang bentahe ng makina direktang kasalukuyang na may halo-halong paggulo ay na, na may malambot na mekanikal na katangian, maaari itong gumana nang walang ginagawa, kapag Fposl = 0. Sa mode na ito, ang dalas ng pag-ikot ng armature nito ay tinutukoy ng magnetic flux Фpar at may limitadong halaga (ang makina ay hindi tumatakbo nang ligaw).
[dokumento]1.doc
Takdang-Aralin #2(modyul 5)
"Direktang kasalukuyang motor na may serye ng paggulo. Pagtatalaga ng mga elemento. Prinsipyo ng operasyon"
gr.TP-07
Asmolkova O. A.
Semestre ko 2009
DC motor na may serye ng paggulo. Pagtatalaga ng mga elemento. Prinsipyo ng operasyon
1. Device at layunin ng mga elemento ng DC motor
.
DC motor - de-kuryenteng makina , DC machine, nagbabago enerhiyang elektrikal DC sa mekanikal na enerhiya. Binubuo ito, tulad ng lahat ng DC machine, ng isang nakapirming stator na may mga pole at isang umiikot na rotor (armature) na may isang kolektor.
stator Ang DC machine ay binubuo ng cylindrical frame (case), pole na may excitation winding at end shields ( kanin. 2.1.). Sa kama, ang mga pangunahing (pangunahing) pole ay pinalakas upang pukawin ang pangunahing magnetic flux at mga karagdagang upang mapabuti ang paglipat sa motor. Ang pangunahing poste ay binubuo ng isang pole core na gawa sa sheet steel at naka-bolted sa frame, at isang excitation coil. Ang core sa libreng dulo ay binibigyan ng isang piraso ng poste upang lumikha ng kinakailangang pamamahagi ng magnetic induction sa kahabaan ng circumference ng armature. kama 3 ay ang pamatok ng makina, ibig sabihin, ang bahagi na nagsasara ng magnetic circuit ng pangunahing flux Ф. Ito ay gawa sa cast steel, dahil ang magnetic flux sa loob nito ay medyo pare-pareho. Ang mga karagdagang pole ay naka-install sa frame sa pagitan ng mga pangunahing. Ang kanilang winding ay konektado sa serye sa armature winding. Ang layunin ng mga pole na ito ay lumikha ng karagdagang magnetic field. Ito ay kinakailangan upang ang mga brush sa kolektor ay hindi kumislap.
Angkla (rotor) ay tinatawag na bahagi ng makina, sa paikot-ikot na kung saan, kapag ito ay umiikot na may kaugnayan sa pangunahing magnetic field Na-induce ang EMF. Angkla 5 Ang DC motor ay binubuo ng isang steel shaft, isang steel toothed core, isang winding na inilatag sa mga grooves nito, at isang collector na naka-mount sa armature shaft ( kanin. 2.1.). Ang mga paikot-ikot na field ay kinakailangan upang matiyak ang pinakamainam na pakikipag-ugnayan sa pagitan ng mga magnetic field ng rotor at stator (i.e. lumikha maximum na sandali sa rotor). katangiang bahagi ng makina (o anuman de-koryenteng makina) Si DC ang kolektor. Ito ay isang guwang na silindro na binuo mula sa hugis-wedge na mga platong tanso na nakahiwalay sa isa't isa. Ang mga manifold plate ay insulated din mula sa motor shaft. Ang mga ito ay konektado sa pamamagitan ng mga conductor sa paikot-ikot na mga thread na inilagay sa mga grooves ng armature. Ang umiikot na paikot-ikot ay konektado sa panlabas na circuit sa pamamagitan ng isang sliding contact sa pagitan ng mga brush at ng commutator. Ang kolektor sa mga makina ng DC ay nagsisilbi upang itama ang variable na EMF na sapilitan sa umiikot na armature winding, at upang makakuha ng isang pare-parehong electromagnetic na sandali sa direksyon.
kanin. 2. 1. DC motor device:
1 - paikot-ikot na paggulo;2 - mga poste;3 - kama;4 - dulo ng poste;5 - angkla;6 - anchor winding conductors;
7 - may ngipin na anchor core;8 - puwang ng hangin sa makina
2. Paggawa prinsipyo ng DC motor
2.1 Pangkalahatang impormasyon
Kapag ang armature winding ay umiikot sa isang nakapirming magnetic field, ang isang variable na EMF ay sapilitan dito, nagbabago sa dalas:
saan n- bilis ng pag-ikot ng armature.
Kapag umiikot ang armature, kumikilos ang variable EMF sa pagitan ng alinmang dalawang punto ng armature winding. Gayunpaman, sa pagitan ng mga nakapirming contact brush, kumikilos ang isang EMF constant sa magnitude at direksyon E, katumbas ng kabuuan ng mga agarang halaga ng EMF na na-induce sa lahat ng series-connected turn ng armature na matatagpuan sa pagitan ng mga brush na ito.
Pag-asa sa EMF E mula sa magnetic flux ng makina at ang bilis ng pag-ikot ng armature ay may anyo:
Kapag ikinonekta ang armature winding sa isang network na may boltahe U, EMF E ay humigit-kumulang katumbas ng boltahe U, at bilis ng rotor:
Samakatuwid, dahil sa pagkakaroon ng isang kolektor, kapag ang isang DC machine ay tumatakbo sa isang motor mode, ang rotor speed ay hindi mahigpit na nauugnay sa mains frequency, ngunit maaaring mag-iba sa isang malawak na hanay sa pamamagitan ng pagbabago ng boltahe. U at magnetic flux F. Ang axis ng symmetry na naghihiwalay sa mga pole ng isang DC machine ay tinatawag na geometric neutral nito.
Sa isang bukas na panlabas na circuit, ang kasalukuyang sa armature winding ay hindi dumadaloy, dahil ang EMF na sapilitan sa dalawang bahagi ng armature winding na matatagpuan sa magkabilang panig ng geometric neutral ay nakadirekta sa tapat at magkaparehong bayad. Upang maibigay ang maximum na boltahe mula sa armature winding sa panlabas na circuit, ang circuit na ito ay dapat na konektado sa dalawang punto ng armature winding, sa pagitan ng kung saan ang pinakamalaking potensyal na pagkakaiba ay nagpapatakbo, kung saan dapat na mai-install ang mga brush. Kapag umiikot ang armature, gumagalaw ang mga punto mula sa geometric na neutral, ngunit parami nang parami ang mga bagong paikot-ikot na punto na lalapit sa mga brush, kung saan kumikilos ang EMF E, kaya ang EMF sa panlabas na circuit ay hindi magbabago sa magnitude at direksyon. Upang mabawasan ang mga ripples ng EMF sa panahon ng paglipat ng mga brush mula sa isang collector plate patungo sa isa pa, hindi bababa sa 16 na aktibong conductor ang karaniwang kasama sa bawat parallel na sangay ng armature winding.
Sa armature, sa pamamagitan ng paikot-ikot na kung saan ang kasalukuyang daloy ako, ang electromagnetic moment ay kumikilos:
Kapag ang makina ay tumatakbo sa motor mode, ang electromagnetic torque ay umiikot.
2.2 DC motor armature reaksyon
Sa idle, ang magnetic flux sa engine ay nilikha lamang ng HC ^F sa paikot-ikot na paggulo. Sa kasong ito, ang magnetic flux F V na may pare-parehong agwat ng hangin sa pagitan ng armature at ng core ng pangunahing poste (na karaniwan para sa maraming DC machine), ito ay ibinahagi nang simetriko na may paggalang sa longitudinal axis ng mga makina.
Kapag ang makina ay tumatakbo sa ilalim ng pagkarga, ang isang kasalukuyang dumadaan sa armature winding, at ang NS ng armature ay lumilikha ng sarili nitong magnetic field. Ang epekto ng armature field sa magnetic field ng makina ay tinatawag anchor reaksyon. magnetic flux F aq nilikha ng na anchor F aq sa isang dalawang-pol na makina, kapag nag-i-install ng mga brush sa neutral, ito ay nakadirekta kasama nakahalang axis machine, kaya ang magnetic field ng armature ay tinatawag na transverse. Bilang resulta ng daloy F aq ang simetriko na pamamahagi ng magnetic field ng makina ay nasira, at ang nagresultang pagkilos ng bagay F gupitin ay puro pangunahin sa mga gilid ng mga pangunahing pole. Sa kasong ito, ang pisikal na neutral b-b(ang linya na nagkokonekta sa mga punto ng armature circle kung saan ang induction ay zero) ay inilipat kaugnay sa geometric neutral a-a sa pamamagitan ng ilang anggulo β (fig.2.2). Sa mga motor, ang pisikal na neutral ay inilipat laban sa direksyon ng pag-ikot.
Batay sa batas buong agos Ang armature ng NS, na kumikilos sa air gap sa layo na x mula sa axis ng mga pangunahing pole ay tinutukoy ng expression:
Samakatuwid, ang NS anchor F aq nag-iiba-iba nang linear sa kahabaan ng circumference nito; sa ilalim ng gitna ng pangunahing poste, ito ay katumbas ng zero, at sa mga punto kung saan naka-install ang mga brush, mayroon itong pinakamataas na halaga. Magnetic induction sa hangin
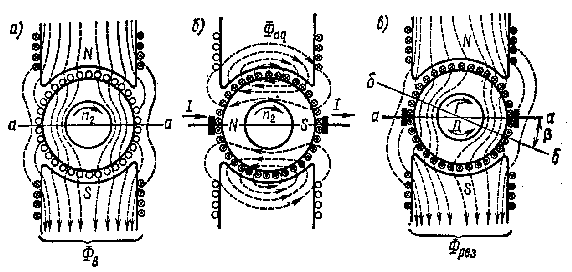
^ Fig2.2 - Ang magnetic field ng isang DC motor: a) mula sa excitation winding; b) mula sa armature winding; c) nagreresulta (F V - magnetic flux sa x.x.; F aq - magnetic flux na nilikha ng NS armature; F gupitin - nagreresultang stream; a-a - geometric na neutral; b-b - pisikal na neutral; β – neutral na anggulo ng pag-aalis b-b)
Clearance na may unsaturated magnetic system:
Nasaan ang halaga ng air gap sa punto x.
2.3 DC motor torque
Kung ang field winding at armature ng motor ay konektado sa isang DC network na may boltahe ^u pagkatapos, mayroong isang electromagnetic torque M Em. Kapaki-pakinabang na metalikang kuwintas M sa motor shaft ay mas mababa sa electromagnetic sa pamamagitan ng halaga ng counteracting moment na nilikha sa makina ng friction forces at katumbas ng moment M X sa x.x. mode, ibig sabihin. M = M Em -M X .
Pagsisimula ng metalikang kuwintas ang motor ay dapat na mas malaki kaysa sa static na preno M t sa estado ng natitirang rotor, kung hindi man ang armature ng motor ay hindi magsisimulang iikot. Sa steady state (sa n = const) mayroong equilibrium ng umiikot na M at braking M t moments:
M = M Em – M X = M T
Ito ay kilala mula sa mechanics na mekanikal na kapangyarihan engine ay maaaring ipahayag sa mga tuntunin ng metalikang kuwintas at angular velocity
Samakatuwid, ang kapaki-pakinabang na metalikang kuwintas ng engine ^M(N m) na ipinahayag sa mga tuntunin ng netong kapangyarihan R(kW) at bilis n(rpm),
M=9550P/n
Talakayin natin ang ilang mahahalagang isyu sa pagsisimula at pagpapatakbo ng mga DC motor. Mula sa equation ng electrical state ng engine, sinusundan nito iyon
ako ako = (U -- E)/R ako
Sa operating mode, ang armature current I I ay limitado e. d.s. E, kung ang n ay tinatayang katumbas ng n nom. Sa oras ng paglunsad, n = 0, e. d.s. E = 0 at panimulang kasalukuyang ako P = U/ R ako 10-30 beses na higit sa nominal. Samakatuwid, ang direktang pagsisimula ng makina, ibig sabihin, ang direktang koneksyon ng armature sa boltahe ng mains, ay hindi katanggap-tanggap. Upang limitahan ang mataas na panimulang kasalukuyang ng armature, isang panimulang rheostat ay konektado sa serye sa armature bago magsimula. R P na may maliit na pagtutol. Sa kasong ito, kapag E = O
ako P =U/(R ako - R P ) << U/R ako
Paglaban ng rheostat RP ay pinili ayon sa pinahihintulutang armature current.
Habang bumibilis ang makina sa rate na bilis e. d.s. E tumataas, at bumababa ang kasalukuyang at ang panimulang rheostat ay unti-unti at ganap na inalis (ang mga panimulang rheostat ay kinakalkula para sa panandaliang pag-on). Pagsasaayos ng rheostat R reg sa isang excitation circuit na may medyo mataas na resistensya (sampu at daan-daang ohms), bago simulan ang makina, ito ay ganap na inalis upang sa start-up ang excitation current at ang stator magnetic flux F ay nominal. Ito ay humahantong sa isang pagtaas sa panimulang metalikang kuwintas, na nagsisiguro ng mabilis at madaling pagpabilis ng makina.
Pagkatapos ng start-up at acceleration, nangyayari ang isang steady-state na operasyon ng engine, kung saan ang braking torque sa shaft ^ Mt ay magiging balanse sa pamamagitan ng sandali na binuo ng makina M Em , i.e. M Em == M T ( sa n = const. )
Maaaring ibalik ng DC motors ang steady state of operation na nabalisa ng pagbabago sa braking torque, ibig sabihin, maaari silang bumuo ng torque M, katumbas ng bagong halaga ng braking torque M T sa isang katumbas na bagong bilis n".
Sa katunayan, kung ang braking torque ng load M t ay mas malaki kaysa sa engine torque M Em, pagkatapos ay bababa ang bilis ng armature. Sa pare-parehong boltahe U at daloy F ito ay magdudulot ng pagbaba. d.s. E armature, pagtaas ng armature current at torque hanggang maabot ang equilibrium, kung saan M Em = M T At n" < n. Kapag ang braking torque ay nabawasan sa M t, ang steady-state na mode ng pagpapatakbo ay katulad na itinatakda sa M Em = M T" At n"> n" . Kaya, ang mga DC motor ay may pag-aari ng self-regulation - maaaring bumuo ng metalikang kuwintas na katumbas ng metalikang kuwintas ng pagpepreno.
2.4 Kontrol sa dalas
Ang bilis ng armature ng isang DC motor ay tinutukoy batay sa equation ng estado ng kuryente U= ER ako ako ako pagkatapos palitan ang e dito. d.s. E = sfn:

Pagbaba ng boltahe ng armature R ako ako ako maliit: sa rated load, hindi ito lalampas 0,03 - 0,07 U nom .
Kaya, ang bilis ng isang DC motor ay direktang proporsyonal sa inilapat na boltahe ng mains at inversely proportional sa stator magnetic flux . Mayroong dalawang paraan upang ayusin ang bilis ng makina: sa pamamagitan ng pagpapalit ng stator flux F o ang boltahe na U na ibinibigay sa makina. Ang kontrol ng bilis sa pamamagitan ng pagbabago ng magnetic field ng makina ay isinasagawa gamit ang isang pagsasaayos ng rheostat sa circuit ng paggulo ng makina. Ang boltahe na ibinibigay sa motor ay binago sa pamamagitan ng pagsasaayos ng source boltahe.
Maaari kang magdagdag ng karagdagang rheostat sa armature circuit. Sa kasong ito, ang panimulang rheostat ay papalitan ng ballast R atbp Ang nasabing rheostat ay gumaganap ng mga function ng parehong panimulang rheostat at pagsasaayos ng rheostat. Sa kasong ito, ang armature rotation frequency equation para sa isang DC motor ay may anyo
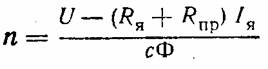
Mula dito sumusunod na ang regulasyon ng bilis ng engine ay maaaring isagawa sa pamamagitan ng pagbabago ng boltahe ng mains, ang paglaban ng ballast rheostat o ang stator flux.
Pagbaliktad ng makina. Mula sa motor torque equation M Em = kFako ako sinusunod nito na ang pag-reverse, ibig sabihin, ang pagbabago ng direksyon ng pag-ikot ng armature, ay maaaring isagawa sa pamamagitan ng pagbabago ng direksyon ng kasalukuyang sa paikot-ikot na paggulo (daloy F) o kasalukuyang armature.
Upang baligtarin ang motor "on the go", ang direksyon ng armature current ay binago (sa pamamagitan ng paglipat ng armature leads), at ang excitation winding ay hindi inililipat, dahil mayroon itong malaking inductance at ang pagsira ng circuit nito sa kasalukuyang ay hindi katanggap-tanggap. Ang pag-reverse ng naka-disconnect na motor ay isinasagawa din sa pamamagitan ng pagbabago ng direksyon ng kasalukuyang sa field winding (pagpalit ng mga output nito).
3. Motor na may serye ng paggulo
Sa isang motor na may serye ng paggulo ( fig.2.3a) ang kasalukuyang paggulo ay katumbas ng kasalukuyang armature: ako V =I A, kaya ang magnetic flux Ф ay isang function ng kasalukuyang load ako A. Ang katangian ng pagpapaandar na ito ay nag-iiba depende sa laki ng pagkarga. Sa ako a <(0,8...0,9) I nom kapag ang magnetic system ay unsaturated, f=k f ako A, at ang koepisyent ng proporsyonalidad SA f sa isang makabuluhang hanay ng mga load ay nananatiling halos pare-pareho. Sa karagdagang pagtaas sa pagkarga, ang daloy F lumalaki nang mas mabagal kaysa sa ako a >Ako nom) maaari nating ipagpalagay na F=const. Alinsunod dito, nagbabago rin ang mga dependency. n=f(I a ), M=f(I a) (kanin. 2.3.b).
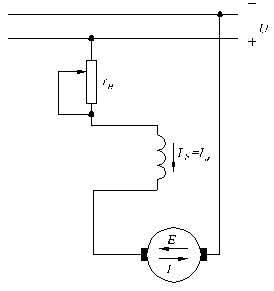
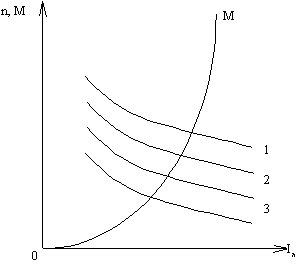
kanin. 2.3. - a) scheme ng engine na may sunud-sunod na paggulo; b) ang pag-asa ng metalikang kuwintas at bilis ng pag-ikot nito sa kasalukuyang armature (I ako - kasalukuyang armature; ako V - kasalukuyang paggulo;r n
- paglaban sa pag-load;
n- bilis ng pag-ikot; 1 - likas na katangian; 2,3 - mga rheostatic na katangian na naaayon sa iba't ibang mga halaga ng karagdagang paglaban r n ).
Bilang karagdagan sa mga likas na katangian 1, posibleng makakuha ng isang pamilya ng mga rheostatic na katangian 2, 3, at 4 sa pamamagitan ng pagsasama ng mga karagdagang resistensya r n sa armature circuit. Kung mas malaki ang halaga ng r n, mas mababa ang katangian.
Sa mababang load, ang bilis n tumataas nang husto at maaaring lumampas sa maximum na pinahihintulutang halaga (ang makina ay napupunta sa "spacing"). Samakatuwid, ang mga naturang engine ay hindi maaaring gamitin upang himukin ang mga mekanismo na tumatakbo sa idle mode at sa mababang load.
Sa isang matibay na katangian, ang bilis ng pag-ikot n halos hindi nakasalalay sa sandaling M, samakatuwid ang kapangyarihan:
![]() , Saan SA 4
- pare-pareho.
, Saan SA 4
- pare-pareho.
Sa isang malambot na katangian ng makina, ang n ay inversely proportional, bilang isang resulta kung saan:
![]() , kung saan ay isang pare-pareho.
, kung saan ay isang pare-pareho.
Samakatuwid, kapag nagbabago ang sandali ng pagkarga sa isang malawak na hanay, ang kapangyarihan R 2 , at samakatuwid ang kapangyarihan R 1 at kasalukuyang ako a pagbabago para sa mga motor na may serye ng paggulo sa isang mas mababang lawak kaysa para sa isang motor na may parallel na paggulo, bilang karagdagan, mas pinahihintulutan nila ang mga labis na karga.
Sa motor na ito, ang field winding ay konektado sa serye sa armature circuit (Larawan 29.9, A), kaya lang magnetic fluxF depende sa load current Ako = ako a = ako sa . Sa mababang pag-load, ang magnetic system ng makina ay hindi puspos at ang pag-asa ng magnetic flux sa kasalukuyang load ay direktang proporsyonal, i.e. F = k f I a (k f- koepisyent ng proporsyonalidad). Sa kasong ito, nakita namin ang electromagnetic moment:
Ang formula ng dalas ng pag-ikot ay kukuha ng form
 . (29.15)
. (29.15)
Sa fig. 29.9, b ipinakita ang data ng pagganap M = F(I) At n= (I) serye paggulo motor. Sa mataas na pagkarga, nangyayari ang saturation ng magnetic system ng engine. Sa kasong ito, ang magnetic flux ay halos hindi nagbabago sa pagtaas ng pagkarga, at ang mga katangian ng motor ay nagiging halos rectilinear. Ang katangian ng bilis ng motor ng serye ng paggulo ay nagpapakita na ang bilis ng motor ay nagbabago nang malaki sa mga pagbabago sa pagkarga. Ang katangiang ito ay tinatawag na malambot.
kanin. 29.9. Sequential excitation motor:
A- circuit diagram; b- mga katangian ng pagganap; c - mekanikal na katangian; 1 - likas na katangian; 2 - artipisyal na katangian
Sa isang pagbawas sa pagkarga ng sunud-sunod na motor ng paggulo, ang bilis ng pag-ikot ay tumataas nang husto at, sa isang load na mas mababa sa 25% ng nominal na halaga, maaari itong maabot ang mga halaga na mapanganib para sa makina ("overshoot ”). Samakatuwid, ang pagpapatakbo ng isang serye ng excitation motor o ang pagsisimula nito na may shaft load na mas mababa sa 25% ng nominal ay hindi katanggap-tanggap.
Para sa mas maaasahang operasyon, ang baras ng sequential excitation motor ay dapat na mahigpit na konektado sa gumaganang mekanismo sa pamamagitan ng isang pagkabit at isang gear. Ang paggamit ng belt drive ay hindi katanggap-tanggap, dahil kung ang sinturon ay nasira o na-reset, ang makina ay maaaring "maubos". Dahil sa posibilidad ng pagpapatakbo ng makina sa tumaas na bilis, ang mga serye ng paggulo engine, ayon sa GOST, ay nasubok sa loob ng 2 minuto upang lumampas sa bilis ng 20% sa itaas ng maximum na ipinahiwatig sa pabrika ng kalasag, ngunit hindi bababa sa 50% sa itaas ng nominal.
Mga katangiang mekanikal serye paggulo motor n=f(M) ay ipinakita sa fig. 29.9, V. Biglang bumabagsak na mga kurba ng mekanikal na katangian ( natural 1 at artipisyal 2 ) ibigay ang sequential excitation motor na may matatag na operasyon sa ilalim ng anumang mekanikal na pagkarga. Ang pag-aari ng mga motor na ito upang makabuo ng isang malaking metalikang kuwintas na proporsyonal sa parisukat ng kasalukuyang pagkarga ay mahalaga, lalo na sa ilalim ng mahirap na mga kondisyon ng pagsisimula at sa panahon ng labis na karga, dahil sa isang unti-unting pagtaas sa pagkarga ng motor, ang kapangyarihan sa input nito ay tumataas nang mas mabagal. kaysa sa metalikang kuwintas. Ang tampok na ito ng mga serye ng paggulo motor ay isa sa mga dahilan para sa kanilang malawak na aplikasyon bilang mga motor ng traksyon sa transportasyon, pati na rin ang mga motor ng crane sa mga pag-install ng pag-aangat, i.e. sa lahat ng mga kaso ng electric drive na may mahirap na mga kondisyon ng pagsisimula at isang kumbinasyon ng mga makabuluhang pagkarga sa motor shaft na may mababang bilis.
Na-rate ang pagbabago ng bilis ng series excitation motor
 , (29.16)
, (29.16)
saan n - bilis ng pag-ikot sa isang load ng engine na 25% ng nominal.
Ang bilis ng pag-ikot ng mga serye ng paggulo ng motor ay maaaring kontrolin sa pamamagitan ng pagbabago ng alinman boltahe U, o ang magnetic flux ng excitation winding. Sa unang kaso, isang pagsasaayos rheostat R rg (Larawan 29.10, A). Sa pagtaas ng resistensya ng rheostat na ito, bumababa ang boltahe sa input ng engine at ang dalas ng pag-ikot nito. Ang pamamaraang ito ng kontrol ay pangunahing ginagamit sa mga maliliit na makina ng kuryente. Sa kaso ng isang makabuluhang lakas ng makina, ang pamamaraang ito ay hindi matipid dahil sa malaking pagkawala ng enerhiya sa R rg . Bukod sa, rheostat R rg , kinakalkula sa operating kasalukuyang ng motor, ito ay lumalabas na mahirap at mahal.
Kapag ang ilang mga makina ng parehong uri ay gumagana nang magkasama, ang bilis ng pag-ikot ay kinokontrol sa pamamagitan ng pagbabago ng scheme ng kanilang pagsasama na may kaugnayan sa bawat isa (Larawan 29.10, b). Kaya, kapag ang mga motor ay konektado sa parallel, ang bawat isa sa kanila ay nasa ilalim ng buong boltahe ng mains, at kapag ang dalawang motor ay konektado sa serye, ang bawat motor ay nagkakahalaga ng kalahati ng mains boltahe. Sa sabay-sabay na operasyon ng mas malaking bilang ng mga makina, posible ang mas malaking bilang ng mga opsyon sa paglipat. Ang pamamaraang ito ng kontrol sa bilis ay ginagamit sa mga de-koryenteng tren, kung saan naka-install ang ilang magkaparehong traksyon na motor.
Posibleng baguhin ang boltahe na ibinibigay sa motor kapag ang motor ay pinapagana mula sa isang DC source na may regulated na boltahe (halimbawa, ayon sa isang circuit na katulad ng Fig. 29.6, A). Sa isang pagbawas sa boltahe na ibinibigay sa motor, ang mga mekanikal na katangian nito ay bumababa, halos hindi binabago ang kanilang kurbada (Larawan 29.11).
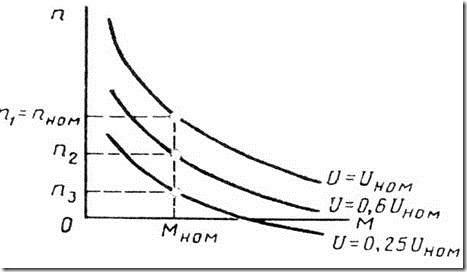
kanin. 29.11. Mga mekanikal na katangian ng isang serye ng paggulo ng motor na may pagbabago sa boltahe ng input
May tatlong paraan para i-regulate ang bilis ng makina sa pamamagitan ng pagbabago ng magnetic flux: sa pamamagitan ng pag-shunting ng excitation winding gamit ang rheostat r rg , i-sectioning ang excitation winding at shunting ang armature winding gamit ang rheostat r w . Ino-on ang rheostat r rg , shunting ang excitation winding (Fig. 29.10, V), pati na rin ang pagbaba sa resistensya ng rheostat na ito ay humahantong sa pagbaba sa kasalukuyang paggulo I in \u003d I a - I rg , at dahil dito, sa pagtaas ng bilis ng pag-ikot. Ang pamamaraang ito ay mas matipid kaysa sa nauna (tingnan ang Fig. 29.10, A), ay ginagamit nang mas madalas at tinatantya ng koepisyent ng regulasyon
 .
.
Karaniwan ang paglaban ng rheostat r rg kinuha kaya krg >= 50% .
Kapag pinag-section ang field winding (Fig. 29.10, G) ang pag-off ng bahagi ng mga pagliko ng paikot-ikot ay sinamahan ng pagtaas sa bilis ng pag-ikot. Kapag shunting ang armature winding gamit ang isang rheostat r w (tingnan ang fig. 29.10, V) tumataas ang kasalukuyang paggulo Ako sa \u003d I a + I rg , na nagdudulot ng pagbaba sa bilis ng pag-ikot. Ang pamamaraang ito ng regulasyon, bagama't nagbibigay ito ng malalim na regulasyon, ay hindi matipid at napakabihirang ginagamit.
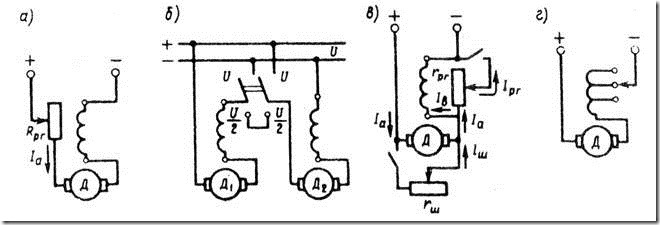
kanin. 29.10. Regulasyon ng bilis ng pag-ikot ng serye ng mga motor ng paggulo





