Med kraft fra titalls watt til flere kilowatt, er de mye brukt i ulike typer husholdningsapparater, stasjoner for husholdnings- og industrivifter, trebearbeidingsmaskiner, pumper, kompressorer, transportører og også små maskiner. Deres fordel er muligheten for å bruke dem på steder og rom der det ikke er noen trefaset nettverk, men et to-leder enfaset nettverk er tilkoblet.
En betydelig del av enfasede asynkrone elektriske motorer er produsert på basis av serielle trefasemotorer. for eksempel er enfasemotorer av ABE-serien laget på grunnlag av trefase innebygde motorer AB, etc. Det er ingen vesentlige forskjeller i utformingen av den mekaniske delen og magnetiske kretser til slike motorer sammenlignet med asynkrone elektriske motorer med trefasestrøm .
Kondensator el. motorer
Hovedforskjellen er i design, utførelse og tilkobling av statorviklingen. For å starte enfasede asynkrone elektriske motorer, brukes ofte en spesiell startvikling, plassert på statoren sammen med hovedarbeidsviklingen, men forskjøvet i en viss vinkel i forhold til den. Start viklingen ofte koblet til nettverket gjennom kondensator, og etter å ha startet og akselerert motoren, slår den seg av. I en rekke design fungerer begge viklingene, og for å øke brukseffektiviteten og forbedre egenskapene til enfasemotorer, kan du la startviklingen være med kondensatorer inkludert i kretsen koblet til nettverket i hele perioden av driften. I dette tilfellet, ved å velge kapasitansen til kondensatorene, i driftsmodusen til maskinen, en sirkulær eller nesten sirkulær roterende magnetfelt, når den inverse komponenten av feltet vil være helt fraværende eller vil bli betydelig svekket. Som et resultat vil ytelsen til maskinen forbedres og effektiviteten av bruken øke. Hvis på jobb enfase motor begge viklingene forblir permanent koblet til nettverket, og en kondensator er koblet i serie med en av dem, da kalles en slik motor kondensator(se fig.).
I en kondensatormotor fungerer begge viklingene. Fra betingelsen for å få et sirkulært felt med antall svinger inn generell sak forskjellig. Å velge en kondensator kan virke som en skremmende oppgave. Det er minst to måter å gjøre dette på.
Den første måten er å velge kapasitansen til kondensatoren empirisk. Kriterier for å evaluere det optimale valget av kapasitans tomgangsstrøm og startmoment. Dreiemomentet skal være maksimalt, og tomgangsstrømmen skal være minimum. Vanligvis er et estimat for tomgangsstrømmen tilstrekkelig.
Den andre måten å velge kapasitansen til en kondensator på er beregningsmetoden. La oss dvele ved dette mer detaljert. I dette tilfellet må spenningene på viklingene faseforskyves med 90o, så
 jUa = Uβkwawa/kwβwβ. (1)
jUa = Uβkwawa/kwβwβ. (1)
Svingende strømmer Ia og Iβ vil også være ute av fase med 90° og vil skape MDS
jIakwawa =Iβkwβwβ (2),
hvor wa og wβ- antall viklingssvinger α og β ;
kwa og kwβ viklingskoeffisienter for viklinger α og β .
Ved å multiplisere venstre og høyre side av likhetene (1) og (2), får vi
UαIα = UβIβ
Det vil si at den totale kraften til begge viklingene vil være lik. Siden viklingene er i samme forhold med hensyn til rotoren, vil også de aktive kraftene som utvikles av dem være like, dvs.
UαIαcosφα = UβIβcosφβ
hvor det følger det φα = φβ .
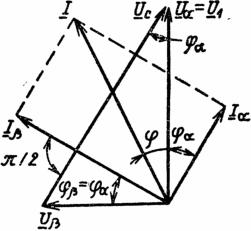
I tillegg, ifølge fig.
Uα = U1 Uβ+Uс = U1
og skiftvinkelen mellom strømmen Iβ og spenningen over kondensatoren Oss er 90°. Disse forholdene tilsvarer vektordiagrammet. I følge dette diagrammet
Us = Uβ /sinφβ
Kapasitansen som kreves for å lage et sirkulært felt bestemmes ut fra forholdet
Iβ = Us /xc = (Uβ / sinφβ) ωC
Hvor
C = Iβ sinφβ / (ωUβ)
Kondensatorkraft er
QC = Us Iβ = Uβ Iβ / sinφβ
Dermed er kraften til kondensatoren lik motorens fulle kraft, dvs. relativt stor. Det skal bemerkes at for en gitt kapasitansverdi C det sirkulære feltet opprettes kun ved én spesifikk motorbelastning (ved én strømverdi). Ved andre belastninger er feltet elliptisk og motorytelsen forringes. Du kan justere kapasitansen med en endring i lasten, men dette vil komplisere motorkretsen. For å oppnå et sirkulært felt ved oppstart og ved enhver belastning, er kondensatorer noen ganger inkludert i to parallelle grener; under belastning fungerer den ene grenen, og ved oppstart er begge slått på. På kondensatormotorer materialbruken er nesten den samme som for trefase motor lik kraft, deres effektivitet er også omtrent lik, og cosφ litt høyere for kondensatormotorer.
For mange enfasede asynkrone motorer er en ekstra (start)kondensator koblet til viklingskretsen koblet til nettverket gjennom en kondensator for varigheten av starten.
Prinsipp for drift og design enfase elektrisk motor.
En standard enfase stator har to viklinger i 90° til hverandre. En av dem regnes som hovedviklingen, den andre - hjelpe eller start. I henhold til antall poler kan hver vikling deles inn i flere seksjoner.
Figuren viser et eksempel på en topolet enfase vikling med fire seksjoner i hovedviklingen og to seksjoner i hjelpeapparatet.
Begrensninger for enfasede elektriske motorer.
FRA Det bør huskes at bruken av en enfaset elektrisk motor alltid er et slags kompromiss. Utformingen av en eller annen motor avhenger først og fremst av oppgaven. Dette betyr at alle elektriske motorer er konstruert etter det som er viktigst i hvert enkelt tilfelle: for eksempel effektivitet, dreiemoment, driftssyklus osv. På grunn av det pulserende feltet kan enfasemotorer ha mer høy level støy sammenlignet med tofasemotorer, som er mye mer stillegående fordi de bruker en startkondensator. Kondensatoren, som den elektriske motoren startes gjennom, bidrar til dens jevne drift.
I motsetning til trefase, er det noen begrensninger for enfasede elektriske motorer. I intet tilfelle skal enfasede elektriske motorer fungere i tomgangsmodus, siden de blir veldig varme ved lav belastning, anbefales det heller ikke å bruke den elektriske motoren med en belastning på mindre enn 25% av full belastning.
Asynkrone e-poster skraverte polmotorer
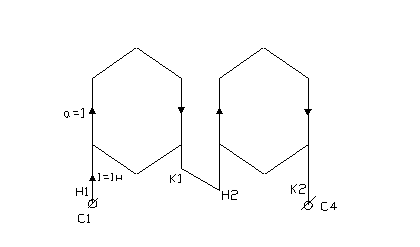
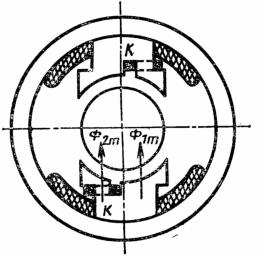 stator induksjonsmotor med skjermede stolper har en fremtredende stolpedesign (se fig.). En enfaset vikling er plassert på polene, som kobles inn enfaset nettverk. En del av stolpen dekker en kortsluttet spole K. Motorrotoren har en konvensjonell kortsluttet vikling i form av et ekornbur.
stator induksjonsmotor med skjermede stolper har en fremtredende stolpedesign (se fig.). En enfaset vikling er plassert på polene, som kobles inn enfaset nettverk. En del av stolpen dekker en kortsluttet spole K. Motorrotoren har en konvensjonell kortsluttet vikling i form av et ekornbur.
Den magnetiske fluksen til en motorpol kan representeres som to komponenter. Den delen av stangen som ikke dekkes av den kortsluttede spolen trenger gjennom strømmen Ф1m, opprettet av statorviklingsstrømmen I1. Den andre delen av stangen kan betraktes som en transformator, der primærvikling er statorviklingen, og sekundæren er en kortsluttet spole. Den resulterende strømmen av denne delen av polen Ф2m er lik den geometriske summen av strømmen f"2m generert av statorviklingsstrømmen I1, og flyt Фк,m fra strøm Ik, indusert i en kortsluttet spole av en fluks f"2m.
 Som følger av vektordiagrammet (se fig.), som ligner vektordiagrammet til en transformator, mellom strømmene til de to delene av polen Ф1m og Ф2m på grunn av skjermingsvirkningen til den kortsluttede spolen, er det et faseskift i tid med en vinkel β
. I tillegg er aksene til disse strømmene forskjøvet med en viss vinkel i rommet. Derfor vil magnetfeltet i maskinen rotere. Siden de magnetiske fluksene Ф1m og Ф2m ikke er lik hverandre og skiftvinkelen mellom dem er mindre enn 90°, vil magnetfeltet være elliptisk. Som et resultat har motorer med skjermede poler en rekke ulemper: store totale dimensjoner, lite startmoment
, lav effektfaktor (cos φ ≈ 0,4 ÷ 0,6) og lav effektivitet på grunn av store tap i en kortsluttet spole (ή ≈ 0,25 ÷ 0,4).
Som følger av vektordiagrammet (se fig.), som ligner vektordiagrammet til en transformator, mellom strømmene til de to delene av polen Ф1m og Ф2m på grunn av skjermingsvirkningen til den kortsluttede spolen, er det et faseskift i tid med en vinkel β
. I tillegg er aksene til disse strømmene forskjøvet med en viss vinkel i rommet. Derfor vil magnetfeltet i maskinen rotere. Siden de magnetiske fluksene Ф1m og Ф2m ikke er lik hverandre og skiftvinkelen mellom dem er mindre enn 90°, vil magnetfeltet være elliptisk. Som et resultat har motorer med skjermede poler en rekke ulemper: store totale dimensjoner, lite startmoment
, lav effektfaktor (cos φ ≈ 0,4 ÷ 0,6) og lav effektivitet på grunn av store tap i en kortsluttet spole (ή ≈ 0,25 ÷ 0,4).
En viss forbedring av deres start- og driftsegenskaper kan oppnås ved å bruke magnetiske shunter av stålplate mellom polene, øke luftgapet under den uskjermede delen av polene, og plassere to eller tre kortsluttede svinger med forskjellig bredde på hver pol. Motorer med skjermede stolper er kommersielt tilgjengelige fra brøkdeler av watt til 300 W og brukes i vifter, spillere, båndopptakere, etc.
Formler for å konvertere en trefase elektrisk motor til en enfase kondensator.

- Med denne omberegningen av en trefaset elektrisk motor til en enfaset, blir ikke antall parallelle grener tatt i betraktning, som et resultat er antallet parallelle grener i arbeids- og startviklingene lik antallet parallelle grener. grener i viklingen av en trefaset elektrisk motor.
Et eksempel på å konvertere en trefase elektrisk motor til en enfase kondensator.
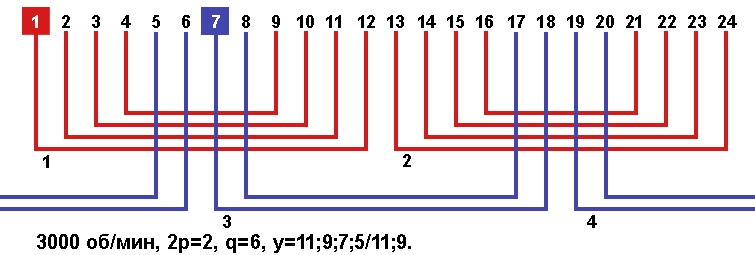
- For et eksempel på å konvertere en trefase til en enfase kondensator, la oss ta en 5AI100S2U3-motor med en effekt på 4,0 kW. 3000 rpm, forsyningsspenning U=220/380, strøm A=14,6/8,15. Den elektriske motoren har følgende viklingsdata: ledningsdiameter d=0,8×2 (i to ledninger), svinger i sporet n=25, antall parallelle grener a=1, viklingsstigning langs sporene y=11;9, antall av statorslisser Z1 =24.
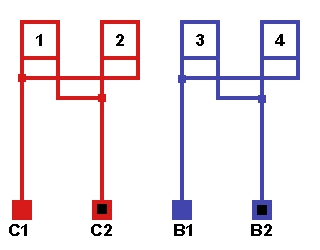
- Først må du beregne leggemønsteret til en enfaset vikling, for en enfaset kondensatormotor er det bedre å velge et leggemønster der arbeidsviklingen opptar 2/3 av sporene i statorkjernen, og starten viklingen opptar 1/3 av sporene i statorkjernen Figur nr. 1. Trinn: arbeidsvikling y=11;9;7;5, startvikling y=11;9.

- Omberegningen av en trefaset elektrisk motor til en enfaset kondensatormotor er fullført. Det viste seg en enfaset elektrisk motor med følgende viklingsdata: arbeidsvikling - antall omdreininger i sporet Nr=13, ledningsdiameter d=1,56; startvikling - antall vindinger i slissen Np=26, tråddiameter d=1,12, antall parallelle grener i arbeids- og startviklingene a=1.
- Å starte og normal operasjon enfasemotor skal forsyningsnettet tåle startstrømmen, og strømmen kl startmoment vil være omtrent syv ganger strømmen i arbeidsviklingen 15,6 × 7 \u003d 109,2 A. Spenningen til kondensatorene er minst 450 volt.
- Velg kapasiteten til arbeideren (ons) og bærerakett (Sp) motorkondensatorer på tomgang (uten belastning).
- Ved å øke eller redusere kapasitansen til kondensatoren, oppnå en god start av motoren. Hvis motoren ikke starter (vanligvis skjer dette med elektriske motorer ved 3000 rpm), må du slipe på dreiebenk aluminium kortsluttende rotorringer. Tverrsnittet til kortslutningsringene må reduseres med 20-50 %, og øker dermed rotormotstanden og slipp. Vanligvis, etter å ha økt motstanden til rotoren, starter den elektriske motoren lett.
- Etter at motoren har startet, mål tomgangsstrømmen i arbeidsviklingen til den elektriske motoren. Tomgangsstrøm i enfase og trefase asynkrone elektriske motorer avhenger av rotasjonshastigheten. Jo lavere motorhastighet, desto nærmere er tomgangsstrømmen motorens merkestrøm. Hvis tomgangsstrømmen til den elektriske motoren ved 3000 rpm. ca. 40-60 % av den nominelle, deretter tomgangsstrømmen til den elektriske motoren ved 250 rpm. vil være omtrent 80-95 % av merkestrøm angitt på platen. Siden vi velger en arbeidskondensator for en enfasemotor på 3000 rpm, bør tomgangsstrømmen være 40-60% av den maksimale strømmen i arbeidsviklingen. Etter å ha beregnet den maksimale strømmen i arbeidsviklingen til en enfaset elektrisk motor er 15,6 A, bør strømmen ved tomgang være fra 6 til 9 A.
- Hva skal jeg gjøre hvis motoren starter bra, men strømmen i arbeidsviklingen på tomgang er nær eller over 15,6 A. Start motoren og, etter akselerasjon, koble fra noen av kondensatorene, la ca. 30-50 % av den totale kapasitansen stå igjen i drift. Ved å redusere eller øke kapasitansen til arbeidskondensatoren velger vi tomgangsstrømmen til en enfaset elektrisk motor fra 6 til 9 A. Kondensatoren som alltid forblir i viklingskretsen til en enfaset elektrisk motor kalles en arbeider en. (ons), en kondensator som kun brukes til å starte den elektriske motoren - start (Sp). Etter å ha installert den elektriske motoren på utstyret, er justering mulig startkondensator i retning av å øke kapasitansen, kan ikke kapasitansen til arbeidskondensatoren endres.
- Tomgangsstrømmen til en enfaset elektrisk motor er normal, strømmen inn starter viklingen må ikke overstige 7,8 A.

Litteratur om dette emnet:
Devotchenko F.S. "Remake trefase elektriske motorer til enfase med viklingserstatning." 1991
Kokorev A.S. "Håndbok for Young Wrappers elektriske maskiner"1979
Meshcheryakov V.V., Chentsov I.M. "Omberegning av elektriske maskiner og tabeller med viklingsdata" 1950
Introduksjon
1. Oppgave til kursprosjektet
2. Utarbeidelse av magnetisk kjerne måledata
3. Valg av viklingstype
4. Beregning av viklingsdata
5. Beregning av det optimale antall svinger i viklingen av en fase
6. Beregning av antall svinger i en seksjon
7. Valg av sporisolasjon og endeviklinger
8. Merkeutvalg og seksjonsberegning viklingstråd
9. Beregning av snittdimensjoner (spolelengde)
10. Beregning av viklingens masse
11. Elektrisk motstand viklinger av en fase likestrøm kald
12. Beregning av nominelle data
13. Oppgave for innpakningen
14. Beregning av en enkeltlags vikling
15. Reberegning av en asynkronmotor for andre parametere
Litteratur
INTRODUKSJON
Asynkronmotorer er hovedomformere elektrisk energi til mekanisk og danner grunnlaget for den elektriske driften av de fleste mekanismer som brukes i alle sektorer av den nasjonale økonomien.
Asynkrone motorer forbruker mer enn 40% av elektrisiteten som produseres i Republikken Hviterussland, deres produksjon krever en stor mengde knappe materialer: elektrisk stål, vikling av kobber, etc., men kostnadene for å betjene det installerte utstyret reduseres. Derfor er opprettelsen av en serie svært økonomiske og pålitelige IM de viktigste oppgavene, og riktig valg motorer, deres drift og høykvalitetsreparasjoner spiller en rolle for å spare material- og arbeidsressurser.
Asynkrone motorer generelt formål effekt fra 0,06 til 400 kW med spenning opp til 1000 V - de mest brukte elektriske maskinene. I den nasjonale økonomiske parken av elektriske motorer står de for 90% i mengde, og omtrent 55% i kraft. Behovet, og følgelig produksjonen av asynkronmotorer for spenninger opp til 1000 V i Hviterussland, vokser fra år til år.
Levetiden til elektrisk utstyr er ganske lang (opptil 20 år). I løpet av denne perioden, under drift, eldes noen av elementene i elektrisk utstyr (isolasjon), andre (lagre) slites ut.
Prosessene med aldring og slitasje deaktiverer den elektriske motoren. Disse prosessene avhenger av mange faktorer: forhold og driftsmåte, Vedlikehold etc. En av årsakene til svikt i elektrisk utstyr er nødmoduser: overbelastning av arbeidsdelen av maskinen, fremmedlegemer som kommer inn i arbeidsmaskinen, åpen-fase driftsmoduser, etc. Feilen i elektriske motorer, hvis det er umulig å raskt erstatte dem, fører til nedleggelse av produktbehandlingslinjer og ofte til store materialtap.
Elektrisk utstyr som har sviktet blir gjenopprettet. Det særegne ved reparasjonen er at motoren beregnes før reparasjonen. Dette er nødvendig for å kontrollere at tilgjengelige motorviklingsdata samsvarer med katalogdataene.
De innhentede dataene sammenlignes med katalogdataene. Bare i tilfelle av en fullstendig samsvar med alle nødvendige verdier med små avvik mellom dem, er det mulig å begynne å reparere den elektriske motoren. Reparasjon av viklinger, spesielt under modernisering, krever en ganske dyp kunnskap om beregningsmetoder, evnen til rasjonelt å bruke elektriske materialer og finne de mest økonomiske løsningene.
1. OPPDRAG TIL KURSPROSJEKTET.
Tabell 1. Startdata for prosjektet.
Dimensjoner på den magnetiske kretsen og dens spor:
D - Indre diameter på statorkjernen, mm.
D a - Utvendig diameter på statorkjernen, mm.
l er den totale lengden på statorkjernen, mm.
Z - antall spor, stk.
b - stor størrelse på sporbredden, mm.
b" er den minste størrelsen på sporbredden, mm.
b w - sporspaltebredde, mm.
h er den totale høyden på sporet, mm.
e er høyden på spormunningen, mm.
δ er tykkelsen på stålplater, mm, og typen isolasjon er oppgitt i tall.
Spesifikasjoner kunde:
n er rotasjonsfrekvensen til statormagnetfeltet, min -1.
U f - fasespenning statorviklinger,
U / Δ - faseviklingstilkoblingsskjema, stjerne / trekant.
f er gjeldende frekvens, Hz.
Ris. 1. Skisse av statorkjernen til en induksjonsmotor og konturen av sporet.
2. KLARGJØRING AV MAGNETISK KRETS MÅLEDATA
Utarbeidelsen av magnetiske kretsmålingsdata utføres for å gjøre det lettere å utføre påfølgende beregninger og inkluderer beregning av:
a) området til stangen i luftspalten (Q d),
b) området til polen i tannsonen til statoren (Q z),
c) tverrsnittsareal av statorens bakside (Q c),
d) fritt sporareal (Q p), mm 2.
De tre første områdene er nødvendige for å beregne de magnetiske belastningene, den siste for å beregne tverrsnittet til viklingstråden.
1. Området til stangen i luftspalten.
I luftgapet er motstanden mot magnetisk fluks over hele området jevn:
(m 2)hvor l p er den estimerte lengden til den magnetiske kretsen, m
t - poldeling
Det er ingen kjølekanaler
(mm)p er antall polpar
(PCS)2. Området til stangen i tannsonen.
I statorens tannsone strømmer den magnetiske fluksen gjennom plater av elektrisk stål, derfor vil polarealet være lik produktet av det aktive området til tannen og antallet i polen:
hvor N z er antall tenner per pol, stk
Q 1 z - arealet av en tann, m 2
(stk) (m 2)hvor la er den aktive lengden på tannen
b z - gjennomsnittlig tannbredde
mhvor Kz er fyllfaktoren til stål, avhenger av tykkelsen på platen av elektrisk stål og typen isolasjon
b’ z – mindre tannstørrelse
b’’ z – større tannstørrelse
tannbredde på smalt punkt
3. Området til den magnetiske kretsen på baksiden av statoren.
Arealet av statorens bakside, vinkelrett på den magnetiske fluksen, er lik produktet av høyden og den aktive lengden til den magnetiske kretsen:
(m 2)hvor h c er høyden på statorens bakside
4. Rilleområde i det klare.
Det klare sporområdet er nødvendig for å beregne tverrsnittet til viklingstråden. For å bestemme området til sporet, er seksjonen delt av aksiale linjer i enkle figurer:
der Qb, Qb' er arealene til halvsirkler med henholdsvis diameter b og b'
Q t - hvor basene er b og b ', og høyden:
3. VALG AV VINDELINGSTYPE
Valget er tatt ut fra:
Tekniske muligheter for vikling under gitte forhold;
Minimum forbruk av viklingstråd;
Nominell effekt og spenning;
spor type;
Fordeler og ulemper med viklinger;
økonomisk gjennomførbarhet.
Opplegget for statorviklingene til trefasede elektriske maskiner er delt inn i:
I henhold til antall aktive sider av seksjonene i sporet, i enkeltlag (hvor den aktive siden av en spole opptar hele sporet) og dobbeltlag (den aktive siden opptar halvparten av sporet),
I henhold til tonehøydestørrelsen for viklinger med full tonehøyde (ved y=y’) og med forkortet tonehøyde (ved y I henhold til rotasjonsfrekvensen til statormagnetfeltet til enkelthastighet og multihastighet, I henhold til antall seksjoner i spolegrupper (fasespoler) for viklinger med samme antall seksjoner i gruppen (q er et heltall) og lik (q er et brøktall). I henhold til måten viklingene utføres på, er de også delt inn i: Mal løs (eller løs), de kalles også viklinger med myke seksjoner. For slike viklinger legges seksjoner en leder gjennom et spor (spor) i et halvt lukket spor. Den brukes til maskiner med lav effekt, spenning opp til 500 V; Broaching, utført ved å trekke ledningen gjennom sporene, brukes til maskiner med spenning opp til 10 000 V med lukkede eller halvlukkede spor. Metoden for å legge viklingene er arbeidskrevende. For tiden brukes de hovedsakelig til delvis reparasjon av viklinger. Viklinger med stive seksjoner, ferdige, isolerte seksjoner, bærende sporisolasjon på aktive deler, plasseres i åpne spor. Brukes til maskiner med middels og høy effekt med spenning opp til 5000 -10000 V og mer. I henhold til metoden for å plassere seksjonene av spolegruppene i statorboringen, samt plasseringen av frontdelene, er de delt inn i: konsentrisk, med plassering av spoler (seksjoner) den ene inne i den andre og plasseringen av frontdelene i to eller tre plan, rulles slike viklinger; mal, med samme seksjoner av spolegrupper. De kan utføres både enkle og vralte. Hvis separasjonen i en mal enkeltlagsvikling ikke utføres i semi-grupper, men i individuelle spoler, får vi en kretsviklingskrets. De viktigste fordelene med en enkeltlags vikling: 1. Mangel på mellomlagsisolasjon, noe som øker fyllingsfaktoren til sporet, og følgelig strømmen og kraften til motoren. 2. Enkel produksjon. 3. Stor mulighet for å bruke automatisering ved legging av viklinger. Feil: 1. Økt forbruk av ledende materiale. 2. Vanskeligheter med å forkorte tonehøyden og følgelig kompensere for de høyere harmoniske av den magnetiske fluksen. 3. Begrensning av muligheten for å konstruere viklinger med et brøkdel antall spor per pol og fase. 4. Mer arbeidskrevende produksjon og installasjon av spoler for store høyspente elektriske motorer. To-lags viklinger er hovedsakelig laget med de samme seksjonene: løkke og kjede, sjeldnere tar de konsentriske. De viktigste fordelene med en to-lags vikling sammenlignet med en enkeltlags vikling: 1. Muligheten for en eventuell forkorting av trinnet, som tillater: a) redusere forbruket av viklingstråden ved å redusere lengden på frontdelen av seksjonen; b) redusere de høyere harmoniske komponentene i den magnetiske fluksen, det vil si redusere tap i motorens magnetiske krets. 2. Enkelheten i den teknologiske prosessen med å produsere spoler (mange operasjoner kan mekaniseres). 3. Muligheten for vikling med nesten hvilken som helst brøkdel q, som sikrer fremstilling av viklingen under reparasjon av asynkronmotorer med en endring i rotorhastigheten. I tillegg er dette en av måtene å tilnærme feltformen til en sinusoid. 4. Muligheten for å danne et større antall parallelle grener. Ulempene med dobbeltlags viklinger inkluderer: 1. Lavere fyllingsfaktor for sporet (på grunn av tilstedeværelsen av mellomlagsisolasjon). 2. Noen problemer med å legge de siste delene av viklingen. 3. behovet for å løfte hele viklingstrinnet hvis undersiden av seksjonen er skadet. Av disse grunner, i dag, i reparasjon praksis av maskiner vekselstrøm dobbeltlags viklinger er mest brukt. Derfor velger vi en to-lags sløyfevikling. 4. BEREGNING AV VINDELDATA Viklingen til en induksjonsmotor plassert i den magnetiske kretsen til statoren består av tre uavhengige faseviklinger (A, B, C). Viklingen til en trefaset AC-maskin er preget av følgende viklingsdata: y - svingete stigning; q er antall spor per pol og fase (lik antall seksjoner i spolegruppen); N er antall spolegrupper; a er antall elektriske grader per spor; a er antall parallelle grener. 1. Svingende stigning Viklestigningen (y) er avstanden, uttrykt i tenner (eller spor), mellom de aktive sidene av samme seksjon: hvor y' er det beregnede trinnet (lik poldelingen uttrykt i tenner); x - et vilkårlig tall mindre enn én, som bringer det beregnede trinnet (y') til et heltall. I praksis er det vanlig å bestemme trinnet i sporene, derfor, når du legger ut den andre siden av seksjonen, ligger den i sporet y + 1. To-lags viklinger utføres med en forkorting av tonehøyden. hvor Ku er koeffisienten for forkorting av viklingsstigningen I praksis og beregninger er det slått fast at den mest gunstige kurven for å endre den magnetiske fluksen fås ved å forkorte det diametriske (kalkulerte) trinnet med Ku=0,8: y=0,8×18=14,4, vi tar y=14 2. Antall spor per stolpe og fase. Antall spor per pol og fase (q) bestemmer antall seksjoner i spolegruppen: hvor m er antall faser Hver viklingsspole er involvert i dannelsen av to poler, siden de aktive lederne på en av sidene har en strømretning, mens de andre er motsatte. Når q>1, kalles viklingen dispergert, mens fasespolene må deles inn i seksjoner, hvor antallet er lik q. 3. Antall spolegrupper I tolagsviklinger dobles antallet spolegrupper mekanisk, men sammenlignet med en enkeltlagsvikling med antall vindinger i hver seksjon er to ganger mindre, da: hvor N 1f (2) er antall spolegrupper i en fase av en to-lags vikling. Siden hvert polpar er skapt av alle tre fasene av vekselstrømmen, derfor: 4. Antall elektriske grader per spor I statorboringen til en asynkronmotor er ett par poler 360 0 el. Dette er tydelig sett i figur 2. Når lederen passerer under ett par poler i statorboringen, (vises) EMF i den endres sinusformet i én omdreining. I dette tilfellet oppstår en full syklus av endring, som er 360 elektriske grader (Figur 2). Antall elektriske grader per spor, eller vinkelforskyvningen mellom tilstøtende spor: 5. Antall parallelle grener Parallelle grener i viklingen av en induksjonsmotor er laget for å redusere tverrsnittet til en konvensjonell ledning, i tillegg gjør dette det mulig å bedre belaste maskinens magnetiske system. Vi kobler alle spolegrupper av denne fasen i serie, da er antallet parallelle grener 1 (a = 1) (fig. 3). På figuren indikerer bokstavene H og K henholdsvis begynnelsen og slutten av spolegruppene. Ris. 3. Spolegruppetilkobling Når de er parallellkoblet, kan antall parallelle forgreninger i prinsippet være lik antall spolegrupper i en fase N 1f. Spolegrupper av fasen kan kobles sammen og kombineres (del i serie og del i parallell), men i dette tilfellet må i alle fall antall spolegrupper i hver parallellgren være det samme, a = 2. Antall parallelle grener legges inn når det er nødvendig å redusere ledningens tverrsnitt. Maksimalt antall parallelle grener: og maks =2×p=2×1=2, godta a=1. 6. Prinsippet for å konstruere en krets av statorviklingen til en trefaset asynkronmotor For å oppnå et roterende magnetfelt til en trefaset asynkronmotor, for ethvert viklingsskjema, er det nødvendig: 1. Forskyvning i rommet av statorboringen til en asynkronmotor av faseviklinger, den ene i forhold til den andre med 120 0 el. 2. Tidsforskyvning av strømmene som går gjennom disse viklingene ved Den første betingelsen er oppfylt ved passende stabling av spolegruppene trefase vikling, den andre - ved å koble en asynkron motor til et trefaset strømnettverk. Når du konstruerer en krets, kan viklingen av den første fasen vanligvis starte fra et hvilket som helst spor. Derfor plasseres den første aktive siden av seksjonen i det første sporet. Vi plasserer den andre aktive siden av seksjonen gjennom ti tenner inn i det ellevte sporet. En spolegruppe har fire seksjoner, deretter opptar den andre og påfølgende seksjonen henholdsvis 2 og 12, 3 og 13, 4 og 14 spor. Antall spolegrupper i en fase vil være fire (beregnet ovenfor) I en enkeltlagsvikling deltar den første spolegruppen i opprettelsen av det første paret poler, det andre må lage det andre polparet, derfor må avstanden mellom dem være lik ett par poler, dvs. 360 elektriske grader. I motsetning til enkeltlagsviklinger, i dobbeltlagsviklinger, forskyves spolegrupper av samme fase ikke med 360 elektriske grader, men med 180. Derfor starter den andre spolen i fase "A" fra det 19. sporet. Viklingen av fasene "B" og "C" utføres på samme måte, men de forskyves henholdsvis med 120 og 240 elektriske grader i forhold til viklingen av fase "A", dvs. i sporene vil det være: 5. BEREGNING AV ANTALL TURNERINGER I AVVIKLING AV EN FASE b) Vektordiagram av en induksjonsmotor. Når spenningen U f påføres viklingen, vil tomgangsstrøm flyte gjennom den (fig. 4). Siden spenningen varierer sinusformet, vil strømmen være variabel. I sin tur vil det skape en magnetisk fluks Ф i det magnetiske systemet til maskinen, som også vil være variabel. En variabel magnetisk fluks Ф induseres i svingene til viklingen, som skapte den EMF (E Ф), rettet mot den motsatt påførte spenningen (loven om elektromagnetisk induksjon). EMF til faseviklingen EF vil være summen av EMF av individuelle svinger E 1v E f \u003d å E 1v eller E f \u003d E 1v × W f hvor W f er antall omdreininger i viklingen av en fase. I tillegg skaper strømmen I xx et spenningsfall DU på den aktive og reaktive motstanden til viklingen. Dermed blir spenningen Uf som påføres viklingen balansert av EMF EF og spenningsfallet i viklingen DU. Alt dette er vist i vektorform i et forenklet vektordiagram (Figur 4). Av det foregående og vektordiagrammet følger det Spenningsfallet er 2,5 ... 4% av U f, det vil si i gjennomsnitt omtrent 3%, uten å kompromittere nøyaktigheten til beregningen, kan du ta: Ef=0,97×Uf; hvor E f er EMF for faseviklingen, V U f - fasespenning, V Øyeblikkelig EMF-verdi på én omgang: hvor t - tid, s Den magnetiske fluksen endres i henhold til loven: Ф=Ф m ×sin×w×t, hvor F m - amplitudeverdien til den magnetiske fluksen, Wb; w er vinkelfrekvensen for rotasjon av feltet; Maksimumsverdien av EMF for én omdreining vil være når deretter (fordi Den faktiske verdien avviker fra maksimum med Siden viklingen er spredt, forsvinner en del av den magnetiske fluksen F, noe som tar hensyn til fordelingskoeffisienten K p: Nesten alle to-lags viklinger er laget med en forkortet tonehøyde. Dette fører til det faktum at ved grensene til polene til seksjoner av forskjellige faser som ligger i samme spor, vil retningen til strømmene være motsatt. Derfor vil den totale fluksen fra disse seksjonene være lik null, noe som vil redusere den totale magnetiske fluksen F. Dette fenomenet tar hensyn til forkortningsfaktoren K y: K omtrent \u003d K p × K y \u003d 0,96 × 0,94 \u003d 0,9 så er til slutt EMF for en omdreining lik: Antall omdreininger per fase: I det resulterende uttrykket, U f og f er gitt av kunden, trenger du kun å vite F for beregning.Den er fordelt jevnt under polen (Figur 5), men hvis arealene til et rektangel med side B cf og a halvsirkel med radius B d er like, vil størrelsen på magnetfeltet under polen være den samme. Verdien av den gjennomsnittlige magnetiske induksjonen: В ср - gjennomsnittlig verdi av magnetisk induksjon i luftgapet, Тl C b - den maksimale verdien av den magnetiske induksjonen i luftgapet, T Fra tabellen "normaliserte elektromagnetiske belastninger av asynkrone motorer" for effekt fra 1 til 10 kW. Vi aksepterer B b \u003d 0.7 Derav verdien av den magnetiske fluksen: Antall omdreininger per fase: Det foreløpige antallet omdreininger i fasen er 94,52 stk, en slik vikling er ikke mulig, siden en del av svingen ikke kan plasseres i statorslissene. På den annen side, når du deler antall omdreininger av faseviklingen i seksjoner, er det nødvendig å fordele dem jevnt, slik at antall omdreininger i alle seksjoner av viklingen W sek er det samme, en slik vikling kalles lik. seksjon. Betingelsen om lik seksjon er oppfylt basert på uttrykket for antall aktive ledere i sporet: hvor a er antall parallelle grener. I formelen viser de to i telleren at spolen har to aktive ledere. For at antall omdreininger i seksjonene skal være det samme, er det nødvendig å avrunde antall aktive ledere i sporet: Med en ettlags vikling opp til heltallsverdi, Med et tolags - opp til et jevnt heltall. Vi runder av antall ledere i sporet til et partall og tar Np = 16 Etter avrunding av antall ledere i sporet, spesifiserer vi antall omdreininger i fasen Vi spesifiserer den magnetiske fluksen, siden den avhenger av antall omdreininger i fasen Vi spesifiserer verdien av magnetiske induksjoner B d, B z, B c. Magnetisk induksjon i luftspalten: Magnetisk induksjon i statorens tannsone: Magnetisk induksjon på baksiden av statoren: Vi sammenligner dem med de maksimalt tillatte verdiene. Alle alternativer for å beregne magnetiske induksjoner er oppsummert i tabell 2. Tabell 2 Magnetiske kretsbelastninger Navn Beregningsformel Beregningsalternativer Grenser Antall ledere i sporet, N s Antall omdreininger i viklingen av en fase, Wf Størrelsen på den magnetiske fluksen Ф ved W f Luftspaltinduksjon, V d Induksjon i tenner, V z Induksjon bak på statoren, V s I følge resultatene av beregningen viser tabellen at det mest optimale alternativet er 2, der den beregnede motoren vil gi maksimal kraft for sitt magnetiske system. Hvis maksimal belastning er normal, vil dette være det beste alternativet. Hvis den magnetiske induksjonen i et område er under normen, det vil si at området er underbelastet (3), og i dette tilfellet vil stålet til magnetkretsen til induksjonsmotoren være underbrukt, vil kraften bli undervurdert. Hvis de magnetiske belastningene er høyere enn induksjonsnormen i noen seksjon, er denne seksjonen overbelastet og motoren overopphetes, dette alternativet (1) er ikke tillatt. Alternativ 2 ville være det beste. 6. BEREGNING AV ANTALL TURNER I EN AVSNITT Med en enkeltlagsvikling opptar lederne til en seksjon (W sek) sporet fullstendig, slik at antall omdreininger i seksjonen er lik antall aktive ledere i sporet. Med en to-lags vikling ligger ledere av to seksjoner i ett spor, derfor er antallet vindinger i en to-lags viklingsseksjon (W sek) lik halvparten av antall ledere i sporet. 7. VALG AV ISOLASJON AV RILLE OG VINDELHODER Hensikten med denne isolasjonen er å gi den nødvendige elektriske styrken mellom viklingene til forskjellige faser, samt viklingene og magnetkretsen (kassen) til en induksjonsmotor. I tillegg må den oppfylle kravene til varmebestandighet, kjemisk motstand, fuktighetsbestandighet, etc. Sporisolasjonen (figur 6) består av en sporboks 1, en mellomlagspakning 2 (hvis viklingen er tolags), en kilepakning 3 og en sporkile 4. Mellomfasepakninger er også installert i frontdelene seksjoner eller spolegrupper, isolasjon inne i maskinkoblinger, samt under bandasjen i sporet og frontale deler av viklingene. Ved reparasjon av IM serie A, A0, A2, A02 med isolasjonsvarmemotstand: A og E (som fortsatt er flertallet i republikken Hviterussland) har fått størst bruk, spilleautomater med 3 lag med dialektikk: Det første laget (plassert i et spor på den magnetiske kretsen), dets formål er å beskytte det andre laget mot skade av stålplater, disse materialene krever først og fremst høy mekanisk styrke (elektrokartong, glimmer, etc.). Det andre laget er hovedlaget elektrisk isolasjon, det krever høy elektrisk styrke (lakkerte stoffer, fleksible filmer, etc.). Det tredje laget er laget av et mekanisk sterkt dielektrikum, det, som det første, beskytter det andre laget mot skade, men med aktive ledere som er plassert i sporet (elektrisk papp, kabelpapir, etc.). Rilleboksen skal passe tett inntil veggene i rillen, ikke rynke ved legging av viklingen, være motstandsdyktig mot riving, stansing, delaminering og tilstrekkelig glatt. Isolasjonen under dekselet er også laget i tre lag, og mellomfasepakningene i frontdelene av viklingen kan ha ett, to eller tre lag, avhengig av materialene som brukes. Elektriske isolasjonsmaterialer for alle spesifiserte viklingsdeler velges avhengig av maskinens nominelle spenning, varmemotstandsklasse, driftsforhold, tilstedeværelsen av dielektriske materialer og av økonomiske årsaker. Bred applikasjon i moderne elektriske maskiner spenning opp til 1000 V mottatt syntetiske filmer og materialer laget med deres bruk - komposittmaterialer. De kan redusere tykkelsen på isolasjonen betydelig på grunn av deres høye elektriske og ofte mekaniske styrke, noe som øker fyllingsfaktoren til sporet. Polyetylentereftalat (lavsan) PET-film og film-elektrokartong brukes primært til produksjon av sporbokser og pakninger. I dette tilfellet er to strimler av film-elektrokartong brettet med en film inni. Polyamidfilm PM brukes i elektriske maskiner med varmebestandighet opp til 220 0 C. Fluoroplastfilm F-4EO, F-4EN har høy fuktighetsbestandighet, motstand mot løsemidler, kjemikalier aktive medier og brukes i spesialmaskiner (for eksempel for arbeid i freonkompressorer) og i tilfeller der varmemotstanden til isolasjonen skal være over 220 0 C. Imidlertid er fluorplastfilmer myke og derfor brukes de til sporisolering i kombinasjon med andre, mer stive materialer. Komposittmaterialer har tilstrekkelig høye mekaniske egenskaper, de leveres i ruller. PET-F og PSK-LP filmplater består av PET-film limt på begge sider med enten fenylfiberpapir (PSK-D) eller lavsanfiberpapir uten impregnering (PSK-L) eller med impregnering (PSK-LP). Glimmerfilm GIP-LSP-PL er et lag av flogopittglimmer, limt på den ene siden med glassfiber, og på den andre med PET-film, er mye brukt for å isolere viklinger fra stive seksjoner. For pakninger i frontdelene brukes materialer hvis overflate har en økt friksjonskoeffisient, spesielt kabelpapir, tynn elektrisk papp, glimmerfilm, asbestfilm (de brukes i motorer i A, A2, A4-serien ). Isolering av tilkoblinger i maskinen og utgangsender utført isolasjonsrør. På steder hvor de ikke utsettes for bøyning, vridning og kompresjon (ved kobling av kretsen), brukes lakkerte rør av følgende merker: TLV og TLS (basert på glassstrømpe og oljelakk) - for maskiner med isolasjonsvarmemotstandsklasse A for drift under normale forhold miljø; TES - for maskiner med varmebestandighetsklasse B av alle versjoner; TKS - for maskiner med varmebestandighetsklasse F og H av kjemisk motstandsdyktig utførelse. Rør basert på organofluorgummikvalitet TRF er de mest fleksible og motstandsdyktige mot knekk. For mekanisk beskyttelse og festing av isolasjon brukes bomull, glass og lavsan tape. Bomullsbånd brukes kun i maskiner med varmebestandighetsklasse A og kun i impregnert form. Glasstapene passer for maskiner med varmebestandighetsklasse E, B, F og H av alle versjoner. For å redusere støvutslipp fra glasstapen, impregneres de med lakk under isoleringen. Lavsan-bånd har blitt utviklet de siste årene og er under introduksjon i produksjon. De kan erstatte ikke bare glassbånd, men også ledninger. De kan brukes til viklinger med isolasjonsklasse H. Lavsan-bånd krever ikke impregnering. Tykkelse av lavsan-bånd: calico - 0,14 mm, cambric - 0,15 mm. Den mest brukte for viklinger er taft lavsan tape, den er tilgjengelig i bredder på 20, 28, 30 mm. Med en bredde på 20 mm er bruddbelastningen til et slikt bånd 390 N. En stor fordel med lavsan-bånd er deres krymping etter varmebehandling, noe som resulterer i en ekstra strekk av isolasjonen. For å koble sammen og bandasjere statorviklingene i frontdelene, brukes bomullssnorstrømper for isolasjonsvarmemotstandsklasse A og glasssnorstrømper for varmebestandighetsklassene B, F, H. Med tanke på den nominelle spenningen, varmemotstandsklassen, driftsforholdene til IM, tilstedeværelsen av dielektriske materialer og økonomiske hensyn, velger vi en syntetisk cellulosetriacetatfilm 35 mikron tykk. Vi bruker også komposittmaterialer basert på syntetiske filmer (vi velger PSK-LP filmsyntetisk papp, 0,30 mm tykk). Vi vil isolere den innvendige tilkoblingen og utløpsendene med TPP elektriske isolasjonsrør med en indre diameter på 2,5 mm. For mekanisk beskyttelse og feste av isolasjon bruker vi bomulls-lavsan og glasstape LES, 0,08 mm tykke. Til binding og bandasjering bruker vi bomullssnorstrømper ASEC (b) -1.0. Materialer valgt for isolering av spor og ender av viklingen: 1. lag - EMU elektrisk papp, tykkelse 2. lag - lakkert klut LHM-105, tykk 3. lag - EMU elektrisk papp, tykkelse Elektrisk styrke til det første laget: Elektrisk styrke til det andre laget: Elektrisk styrke til det tredje laget: Den totale elektriske styrken til den slissede isolasjonsboksen: Kontrollere den elektriske styrken til hylsen: fordi 12>1,0+2 da tilfredsstiller isolasjonen de fastsatte betingelsene, dessuten kan dielektrikum tas med en mindre tykkelse. Men gitt behovet for å sikre den nødvendige mekaniske styrken til isolasjonen, kan de valgte materialene godkjennes. 8. VALG AV MERKE OG BEREGNING AV DELEN AV VINDELTÅREN Valget av ledningsmerke gjøres avhengig av nominell spenning, varmemotstandsklasse, versjon, motoreffekt og økonomiske hensyn. Estimert tverrsnitt av ledningen med isolasjon: hvor K z er fyllingsfaktoren til sporet; K s \u003d 0,48 Denne diameteren er ikke i tabellene, så vi velger antall parallelle seksjoner a' = 2 Beregnet ledningsdiameter med isolasjon: Diameter isolert ledning må være 1,5 ... 2 mm mindre enn sporbredden d'
Standardisert diameter på den isolerte ledningen Gatet ledningsseksjon: Bestem den faktiske fyllingsfaktoren til sporet: Vi vil vikle motorviklingen med en ledning: 9. BEREGNING AV SEKSJONSDIMENSJONER (SPOELENGDE) Å bestemme lengden på spolen er nødvendig for å sette malen ved fremstilling av seksjoner av spolegrupper. Gjennomsnittlig spolelengde: hvor la er spaltens (aktive) lengde på spolen, m. I fravær av tverrgående kjølekanaler i den magnetiske kretsen l l - lengde på frontdelen av spolen, m. hvor k - korreksjonsfaktor, T er gjennomsnittlig seksjonsbredde, m. 10. BEREGNING AV VINDELVEKT Beregning av viklingens masse er nødvendig for å få viklingstråden fra lageret. Massen til viklingsmetallet bestemmes ved å multiplisere tettheten til ledermaterialet med volumet av ledningen: hvor g er tettheten til ledermaterialet, kg / m 3, (for kobber - 8900 kg / m 3).Enkeltlags viklinger er hovedsakelig laget med enkle maler, maler i "sammenbruddet", kjede, konsentriske.
![]()
![]() 2×1=2
2×1=2 ![]()

Ris. 2. EMF endring under polene. ![]()
![]() .
.
![]() ;
; ![]()
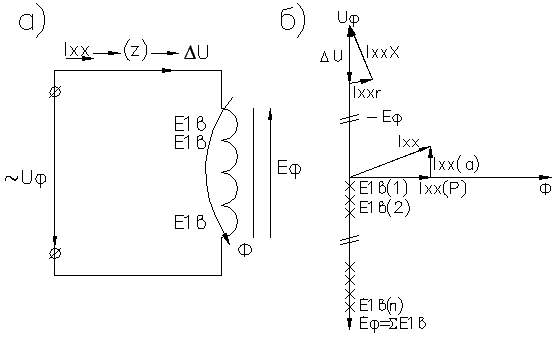
Ris. 4. a) Ekvivalent krets for viklingen til en asynkronmotor; 
![]()
![]()
![]()
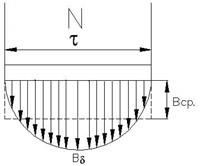
Ris. 5. Magnetisk felt på polen.  (Wb) - koeffisient som tar hensyn til jevnheten i fordelingen av den magnetiske fluksen under polen.
(Wb) - koeffisient som tar hensyn til jevnheten i fordelingen av den magnetiske fluksen under polen.  PCS
PCS ![]() PCS
PCS  wb
wb  Tl
Tl  Tl
Tl ![]() Tl
Tl
![]()
![]()
![]()

Ris. 6. Sporviklingsisolasjon. ![]() kV;
kV; ![]() kV.
kV.  mm 2
mm 2  mm
mm  mm
mm ![]()

![]() (m)
(m)
Vi anbefaler deg å lese
 Psykologiske kjennetegn ved barn i ungdomsårene
Psykologiske kjennetegn ved barn i ungdomsårene Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole
Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole, diagnose, behandling Behandling av urogenital klamydia") Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia
Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva
Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva

