For alle induksjonsmotor den nominelle modusen kan defineres, dvs. modusen for langtidsdrift, der motoren ikke overopphetes over den innstilte temperaturen. Øyeblikket M vurdert, tilsvarende den nominelle modusen, kalles. nominelt øyeblikk. Den tilsvarende nominelle slipen for asynkronmotorer med middels effekt er s H0M = 0,02 ... 0,06, dvs. nominell hastighet n og ohm er innenfor
n nom = n 0 (1 - s 0) \u003d (0,94 ... 0,98) p 0
Forholdet mellom det maksimale dreiemomentet og det nominelle til m = = Mmax / M nom kalles overbelastningskapasiteten til asynkronmotoren. Vanligvis k m \u003d 1,8 ... .2.5.
Ved oppstart, det vil si ved start og under akselerasjon, er asynkronmotoren under forhold som er vesentlig forskjellig fra forholdene ved normal drift. Dreiemomentet utviklet av motoren må overstige belastningsmomentet, ellers vil ikke motoren kunne akselerere. Fra synspunktet om å starte motoren, spiller startmomentet en viktig rolle.
Forholdet mellom startmomentet M p utviklet av motoren i en stasjonær tilstand, det vil si ved n \u003d 0, til det nominelle dreiemomentet k p \u003d M p / M nom kalles multiplisiteten av startmomentet.
Det maksimale momentet M max kalles det kritiske momentet til den asynkrone maskinen. Driften av maskinen med et dreiemoment som overstiger det nominelle er kun mulig i kort tid, ellers reduseres maskinens levetid på grunn av overoppheting.
Som et resultat av samspillet mellom en roterende magnetisk fluks med strømmene indusert av den i lederne til rotorviklingen, oppstår det krefter som virker på disse lederne i tangentiell retning. La oss finne verdien av øyeblikket skapt av disse kreftene på maskinens aksel.
Den elektromagnetiske kraften som overføres til rotoren av det roterende magnetfeltet er lik:
hvor M eh - elektromagnetisk øyeblikk virker på rotoren.
I henhold til den ekvivalente kretsen til en fase av maskinen:
Fra disse uttrykkene finner vi:
Gitt gjeldende rotorstrøm, EMF, induktiv reaktans vi får:
Vi introduserer en konstant og neglisjerer friksjonsmomentet, vi representerer uttrykket for øyeblikket på akselen i formen:
Hvis den magnetiske fluksen Ф er uttrykt i webers, vil strømmen I 2 - i ampere vil dreiemomentet være i newtonmeter (Nm).
Maskinens dreiemoment avhenger av belastningen f, I 2 og , men det kan representeres som en funksjon av én variabel. Som en slik variabel for en induksjonsmotor er det mest praktisk å velge slipen s.
I følge de tidligere studerte formlene:
Forutsatt at nettverksfrekvensen er uendret, introduserer vi
36. Metoder for å regulere hastigheten på rotasjonshelvete med kortslutning. rotor
37.Start og kontroller rotasjonshastigheten til blodtrykket med f.r.
Regulering ved å endre sliringen utføres ved å endre motstanden R p til justeringsreostaten i rotorkretsen.
Innføringen av en reostat i rotorkretsen endrer avhengigheten av dreiemomentet M på slip s uten å påvirke størrelsen på det maksimale dreiemomentet. Tre karakteristika M(er): naturlig (ikke-reostatisk) karakteristikk 1 tilsvarer en kortsluttet rotorvikling (reostatmotstand = 0), reostatiske (kunstige) karakteristika 2 og 3 tilsvarer det introduserte ett og to trinn i reostaten.
Innføringen av en reostat i rotorkretsen har en positiv effekt på startstrømmen, og reduserer den med omtrent 2 ganger sammenlignet med en kortsluttet IM.
Ulempene med denne metoden: 1) lav effektivitet på grunn av tap i reostaten Rp; 2) reduksjon i stivheten til mekaniske egenskaper; 3) hastigheten kan kun justeres nedover.
Starte en asynkronmotor med faserotor. Oppstarten av asynkronmotorer skiller seg betydelig fra forholdene ved normal drift. Motormomentet ved oppstart må overstige lastmotstandsmomentet, startmomentet spiller en rolle. Den andre viktige startkarakteristikken er startstrømmen. Startstrømforhold for motorer med ekorn-burrotor når 5-7, noe som kan være uakseptabelt for motoren eller for nettverket, og kan utgjøre en forskjell i jevnheten til starten. Oppstarten av en motor med faserotor utføres gjennom en 3-fase reostat, som hver fase er koblet gjennom børster og ringer til en av fasene til rotoren. Ved starten av starten er reostaten satt helt inn, ved slutten av starten fjernes den og alle tre faser av rotoren er kortsluttet. Antall reostattrinn antas å være mer enn to, og bytteprosessen ved oppstart er vanligvis automatisert. Innføringen av aktive motstander i faserotorkretsen øker dreiemomentet og gjør starten jevn og begrenser startstrømmen. Denne startmetoden har en rekke fordeler, men gjelder kun for motorer med faserotor.
39,40. Enhet, prinsipp for drift av motoren likestrøm. Eksitasjonsmetoder. EMF av ankerviklingen og elektromagnetisk dreiemoment Design og prinsipp for drift av en DC-motor En DC-motor består av en fast del - statoren og en roterende del - ankeret, atskilt av et luftgap. De viktigste tilleggspolene er festet til den indre overflaten av statoren. Hovedpolene med eksitasjonsviklinger tjener til å skape den viktigste magnetiske fluksen F i maskinen, og de ekstra for å redusere gnistdannelse.
Armaturet består av en aksel, en kjerne, en vikling og en samler. Samleren inneholder kobberplater isolert fra hverandre, som er koblet til delene av armaturviklingen. Faste børster er lagt over samleren; koble ankerviklingen med en ekstern elektrisk krets. Som et resultat av samspillet mellom ankerstrømmen Iya Og den magnetiske fluksen Ф, skapes et dreiemoment, M = CmFIa, hvor Cm er momentkonstanten, som avhenger av designdataene til maskinen. Motorens dreiemoment M balanseres av motstandsmomentet Ms til arbeidsmaskinen. Når ankeret roterer med en frekvens n, krysser viklingen den magnetiske fluksen Ф og i den, i henhold til loven om elektromagnetisk induksjon, induseres en mot-EMF E \u003d CeFp, hvor Ce er en konstruktiv konstant.
Spenningen ved ankeret ezhimax U er lik summen av EMF og spenningsfallet over motstanden til ankerkretsen U=E +RyaIya=CeFn, hvorav ankerstrømmen Ia=(U-CeFn)/Rya, og hastighet n=(U-RyaIya)/CeF/
Avhengig av metoden for å levere eksitasjonsviklingen, er DC-generatorer:
| a B C D) |
Ris. 50. Generatoreksitasjon: a - uavhengig, b - parallell, c - seriell, d - blandet.
På uavhengig opphisselse OB drives av en ekstern kilde. Den brukes i tilfeller der det er nødvendig å regulere eksitasjonsstrømmen I inn og spenningen U ved klemmene til maskinen over et bredt område. Armaturstrømmen er lik laststrømmen I I \u003d I n (fig. 50, a)
Selveksiterte generatorer har OB-er drevet av selve generatoren.
Når OB er skrudd på parallelt med armaturviklingen har vi en generator med parallell eksitasjon(Fig. 50, b), hvor I I \u003d I n + I c. For kraftige maskiner med normal utførelse er I in vanligvis 1-3%, og for små maskiner - opptil flere titalls% av ankerstrømmen. Ved generatoren med sekvensiell eksitasjon(Fig. 50, c) ORP kobles i serie med ankeret, dvs.
I i \u003d I n \u003d I c.
Generatorer med blandet eksitasjon har to eksitasjonsviklinger, OB er koblet parallelt med ankeret, og den andre ORP er i serie (fig. 50, d). Den viktigste er vanligvis OB. ORP magnetiserer maskinen med en økning i belastningsstrømmen, som kompenserer for spenningsfallet U i ankerviklingen og den avmagnetiserende effekten av ankerreaksjonen.
Spenningen U 1 påført fasen til statorviklingen balanseres av hoved-EMF E 1, lekkasje-EMK og spenningsfallet over den aktive motstanden til statorviklingen:
I en rotorvikling vil en lignende ligning se slik ut:
Men siden rotorviklingen er lukket, er spenningen U 2 \u003d 0, og hvis vi også tar i betraktning at E 2s \u003d SE 2 og x 2s \u003d Sx 2, så kan ligningen skrives om som:
![]()
Ligningen for strømmene til en induksjonsmotor gjentar en lignende ligning for en transformator:
28 Asynkron motormoment
Dreiemomentet i en induksjonsmotor skapes av samspillet mellom rotorstrømmen og maskinens magnetiske felt. Dreiemomentet kan uttrykkes matematisk i form av den elektromagnetiske kraften til maskinen:
hvor w 1 =2pn 1 /60 - vinkelfrekvens for rotasjon av feltet. I sin tur, n 1 =f 1 60/R, deretter
![]()
Erstatter i formelen M 1 uttrykk REm=Pe2/S og ved å dele på 9,81 får vi:
![]()
Induksjonsmotorens dreiemomentligning
Det følger at motormomentet er proporsjonalt med de elektriske tapene i rotoren. Erstatt gjeldende verdi i den siste formelen Jeg 2 ’ :
vi får ligningen for dreiemomentet til en induksjonsmotor:
hvor U 1 - fasespenning til statorviklingen.
29 .Motormekanisk karakteristikk kalles rotorhastighetens avhengighet av dreiemomentet på akselen n = f (M2). Siden tomgangsmomentet er lite under belastning, er M2 ≈ M og mekaniske egenskaper er representert ved avhengigheten n = f (M). Hvis vi tar hensyn til forholdet s = (n1 - n) / n1, så kan den mekaniske karakteristikken oppnås ved å presentere dens grafiske avhengighet i koordinatene n og M (fig. 1).
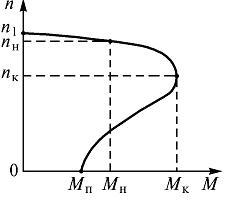
Ris. 1. Mekanisk karakteristikk av asynkronmotor
Naturlig mekanisk karakteristikk av en induksjonsmotor tilsvarer hoved (pass) kretsen for dens inkludering og de nominelle parameterne for forsyningsspenningen. Kunstige egenskaper oppnås hvis noen tilleggselementer er inkludert: motstander, reaktorer, kondensatorer. Når motoren forsynes med en ikke-merket spenning, skiller egenskapene seg også fra den naturlige mekaniske karakteristikken.
De mekaniske egenskapene er veldig praktiske og nyttig verktøy i analysen av statiske og dynamiske moduser for den elektriske stasjonen.
30 Mekanisk karakteristikk og motorisk selvregulering. Grafen som forbinder mekaniske størrelser - hastighet og dreiemoment - kalles den mekaniske egenskapen til en induksjonsmotor (fig. 7) n = ƒ(M). Selvregulering av en asynkronmotor er som følger. La motoren jobbe jevnt i en eller annen modus, og utvikler hastighet n1 og dreiemoment M1. Med jevn rotasjon er dette momentet lik bremsemomentet M t1, dvs. M1=M t 1, n1 = kons. Økning av bremsemomentet til M2 vil føre til en reduksjon i maskinens hastighet, siden bremsemomentet vil bli større enn dreiemomentet. Med en nedgang i hastigheten øker slipingen, noe som igjen fører til en økning i EMF og strøm i rotoren. Dette øker motorens dreiemoment. Denne prosessen avsluttes når dreiemomentet M2 utviklet av motoren blir lik M t 2. I dette tilfellet settes rotasjonshastigheten lavere enn n1. Egenskapen til automatisk likevekt mellom bremsing og dreiemoment kalles selvregulering.
På et laboratoriestativ er motoren lastet med en elektrisk brems, bestående av en elektromagnet, i gapet som en skive roterer, plantet på motorakselen. Ved å endre spenningen som forsyner elektromagnetspolen med håndtaket på autotransformatoren, er det mulig å endre bremsekraften, hvis øyeblikk er: M TORM \u003d F r (N m)
hvor F er kraften (kraften) som virker på omkretsen av remskiven, (N);
r - remskiveradius, lik 0,18 m. Nyttig kraft på motorakselen:
hvor n- motorens rotasjonshastighet, rpm.
hvor ƒ - nettverksfrekvens (lik 50 Hz),
R- antall par poler av statorviklingen (lik 2).
n 1 - synkron hastighet på den roterende magnetfelt.
Motorturtallet bestemmes ved hjelp av en turteller. Slip beregnes med formelen:
31 Driftsegenskaper kalt maktavhengigheter, forbrukt av motoren, forbrukt strøm I, effektfaktor, motorhastighet, effektivitet og dreiemoment M fra den nyttige kraften til motoren gitt til akselen. Ytelsesegenskaper bestemmer de grunnleggende ytelsesegenskapene til en induksjonsmotor. Ytelsesegenskapene til en induksjonsmotor med middels kraft er vist i fig. 8.8. Deres oppførsel er forklart som følger. Ved lett belastning kan motorstrømmen I (ikke-laststrøm) være mellom 20 % og 70 % av merkestrømmen. Når belastningen øker, øker strømmen i rotorkretsen, noe som fører til en nesten proporsjonal økning i strømmen Jeg i statorkretsen.

Fig.8.8 Motormoment () er også nesten proporsjonal med belastningen, men ved høye belastninger blir lineariteten til grafen noe krenket ved å redusere motorhastigheten. Ytelseskarakteristikken uttrykker forholdet mellom kraften som utvikles av motoren og faseforskyvningen mellom statorstrømmen og spenningen. En asynkron motor, som en transformator, bruker en strøm I fra nettverket, som er betydelig ute av fase med den påførte spenningen. For eksempel i hvilemodus. Med en økning i belastningen på motorakselen øker de aktive komponentene i rotoren og statorstrømmene, øker . Maksimalverdien er nådd kl .
Ved ytterligere økning vil verdien synke litt. Dette skyldes en økning i slip s, som forårsaker en økning i reaktansen til rotorviklingen, og følgelig faseforskyvningen . FRAøker og øker, dvs. vil avta.
Oppførsel driftskarakteristikk er forklart som følger. Verdien av effektivitet bestemmes av forholdet mellom nyttig kraft og kraften som forbrukes fra nettverket.
Verdien kalles effekttapet. I tillegg til tap i stålet til statoren og rotoren på grunn av magnetiseringsreversering og virvelstrømmer, som sammen med mekaniske tap kan betraktes som konstante, er det tap i kobber i en asynkronmotor. ,
de. i stator- og rotorviklingene, som er proporsjonale med kvadratet på strømmen og derfor avhengig av belastningen. Under tomgang, som i en transformator, dominerer tap i stål, siden og er lik tomgangsstrømmen, som er liten. Med små belastninger på akselen forblir tapene i kobber fortsatt små, og derfor bestemmes effektiviteten av formelen ![]() (8.5)
(8.5)
øker kraftig i starten. Når de faste tapene blir lik de lastavhengige tapene , effektivitet når sin maksimale verdi. Med en ytterligere økning i belastningen øker de variable effekttapene betydelig, som et resultat av effektiviteten synker merkbart. Naturen til avhengighet ) kan forklares ut fra relasjonen . Hvis effektiviteten var konstant, så ville det være et lineært forhold mellom og. Men siden effektiviteten avhenger av og denne avhengigheten øker til å begynne med kraftig, og med en ytterligere økning i belastningen endres litt, så vil kurven ) først øker sakte, og deretter øker kraftig.
32 Til enhver elektrisk krets summen av kreftene til alle elektriske energikilder må være lik summen av kreftene til alle mottakere og hjelpeelementer. Etter å ha fått effektuttrykkene tidligere, er det mulig å skrive i en generell form effektbalanseligningen for enhver elektrisk krets:
Σ E → Jeg → + Σ U ← Jeg → = Σ E ← Jeg → + Σ U → Jeg → + Σ Jeg 2 r.
Ligning (1.35) kan skrives både for de reelle EMF-retningene, spenningene og strømmene, og for tilfellet når noen av dem er vilkårlig valgte positive retninger. I det første tilfellet vil alle termer i den være positive, og de tilsvarende elementene i kretsen vil faktisk være kilder eller mottakere av elektrisk energi. Hvis på den annen side noen termer er skrevet med hensyn til vilkårlig valgte positive retninger, må de tilsvarende elementene betraktes som tiltenkte kilder og mottakere. Som et resultat av beregninger eller analyser kan noen av dem vise seg å være negative. Dette vil bety at noen av de antatte kildene faktisk er en vask, og noen av de antatte synkene er en kilde.
33 Starte en asynkronmotor er ledsaget av en forbigående prosess av maskinen assosiert med overgangen til rotoren fra en hviletilstand til en tilstand med jevn rotasjon, der motorens dreiemoment balanserer motstandskreftene på maskinakselen. Ved start av en asynkronmotor er det et økt forbruk av elektrisk energi fra forsyningsnettverket, som ikke bare brukes på å overvinne bremsemomentet som påføres akselen og dekke tap i selve asynkronmotoren, men også på å kommunisere en viss kinetisk energi til de bevegelige delene av produksjonsenheten. Derfor, ved start, må en asynkronmotor utvikle et økt dreiemoment. Til asynkronmotor med faserotor startmomentet, tilsvarende slip sp = 1, avhenger av de aktive motstandene til de justerbare motstandene som er introdusert i rotorkretsen.
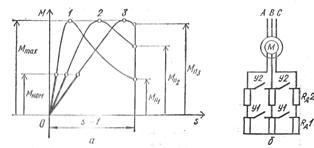
Ris. 1. Starte en trefaset asynkronmotor med en faserotor: a - grafer over avhengigheten av dreiemomentet til motoren med en faserotor på slip ved forskjellige aktive motstander av motstander i rotorkretsen, b - diagram over inkludering av motstander og akselerasjonslukkekontakter i rotorkretsen. Så, med lukkede akselerasjonskontakter U1, U2, dvs. når du starter en asynkronmotor med kortsluttede kontaktringer, er startmomentet Mp1 = (0,5 -1,0) Mnom, og startstrømmen Ip = (4,5 - 7) Inom og mer. Lite startmoment asynkron motor med en såret rotor er kanskje ikke nok til å drive produksjonsenheten og deretter akselerere den, og en betydelig startstrøm vil føre til økt oppvarming motorviklinger, som begrenser frekvensen for påslagning, og i laveffektnettverk fører til et midlertidig spenningsfall som er uønsket for driften av andre mottakere. Disse omstendighetene kan være årsaken som utelukker bruken av asynkronmotorer med en faserotor med stor startstrøm for å drive arbeidsmekanismer. Innføringen av justerbare motstander, kalt startmotstander, i motorrotorkretsen reduserer ikke bare startstrømmen, men øker samtidig startmomentet, som kan nå maksimalt dreiemoment Mmax (fig. 1, a, kurve 3) ), hvis den kritiske glidningen til motoren med en faserotor er sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, hvor Rd" er den aktive motstanden til motstanden plassert i fasen av motorens rotorvikling, redusert til fasen av statorviklingen. En ytterligere økning av den aktive motstanden til startmotstanden er upraktisk, siden den fører til en svekkelse av det innledende startmomentet og utgangen av det maksimale dreiemomentpunktet inn i glideområdet s > 1, noe som utelukker muligheten for rotorakselerasjon. Den nødvendige aktive motstanden til motstandene for å starte en motor med en faserotor bestemmes basert på kravene til starten, noe som kan være enkelt når Mp = (0,1 - 0,4) Mnom, normal hvis Mp - (0,5 - 0,75) Mnom, og tung på Mp ≥ Mnom. For å opprettholde et tilstrekkelig stort dreiemoment av motoren med en faserotor under akselerasjonen av produksjonsenheten for å redusere varigheten av den forbigående prosessen og redusere oppvarmingen av motoren, er det nødvendig å gradvis redusere den aktive motstanden til start motstander. Den tillatte dreiemomentendringen under akselerasjon M(t) bestemmes av de elektriske og mekaniske forholdene som begrenser toppmomentgrensen M > 0,85 Mmax, koblingsmomentet M2 > > Ms (fig. 2), samt akselerasjon.

Ris. 2. Startkarakteristikk for en trefaset asynkronmotor med en faserotor. Kobling av startmotstander tilveiebringes ved suksessiv innkobling av akselerasjonskontaktorer Y1, Y2, henholdsvis ved tidspunktene t1, t2, regnet fra det øyeblikk motoren startes, når dreiemomentet M under akselerasjon blir lik koblingsmomentet M2. På grunn av dette, under hele oppstarten, er alle toppmomentene de samme og alle koblingsmomentene er like med hverandre. Siden dreiemomentet og strømmen til en asynkronmotor med en faserotor er gjensidig relatert, er det mulig å stille inn toppstrømgrensen I1 \u003d (1,5 - 2,5) Inom og koblingsstrømmen I2 under akselerasjonen av rotoren, som skal gi koblingsmomentet M2\u003e Mc. Frakobling av asynkronmotorer med faserotor fra forsyningsnettet utføres alltid med kortsluttet rotorkrets, for å unngå overspenninger i fasene til statorviklingen, som kan overstige nominell spenning til disse fasene med 3-4 ganger hvis rotorkretsen er åpen i det øyeblikket motoren slås av.
34 Frekvensregulering. Denne metoden for hastighetskontroll tillater bruk av de mest pålitelige og billigste asynkronmotorene med en ekorn-burrotor. For å endre frekvensen til forsyningsspenningen er det imidlertid nødvendig med en elektrisk strømkilde med variabel frekvens. Som sistnevnte brukes enten synkrone generatorer med variabel hastighet, eller frekvensomformere - elektriske eller statiske, laget på kontrollerte halvlederventiler (tyristorer). For tiden har frekvensomformere en ganske kompleks krets og en relativt høy kostnad. Den raske utviklingen av krafthalvlederteknologi lar oss imidlertid håpe på ytterligere forbedringer av frekvensomformere, noe som åpner for muligheter for bred applikasjon frekvensregulering. En detaljert beskrivelse av reguleringslovene for frekvensregulering og en analyse av driften av en asynkronmotor når den drives av en frekvensomformer er gitt i § 4.13 og 4.14. Regulering ved å endre antall stolper. Denne reguleringen lar deg få en trinnvis endring i hastighet. På fig. 4,35 vist den enkleste kretsen(for en fase), som lar deg endre antall poler på statorviklingen to ganger. For å gjøre dette er hver fase av statorviklingen delt inn i to deler, som byttes fra seriekobling til parallell. Det kan sees av figuren at når spolene 1-2 og 3-4 slås på i to parallelle grener, halveres antallet poler, og følgelig dobles rotasjonsfrekvensen til magnetfeltet. Ved veksling halveres antall seriekoblede svinger i hver fase, men siden rotasjonshastigheten dobles, forblir EMF indusert i fasen uendret. Derfor kan motoren ved begge hastighetene kobles til nettverket med samme spenning. For ikke å slå inn rotorviklingen, utføres sistnevnte kortsluttet. Hvis du trenger å ha tre eller fire hastigheter, plasseres en annen vikling på statoren, ved å bytte som du kan få ytterligere to frekvenser. Polskiftende induksjonsmotorer kalles multi-hastighet. Regulering ved å inkludere en reostat i rotorkretsen. Når ytterligere aktive motstander er inkludert i rotorkretsen R ext1, R ext2, R add3 og andre endrer formen for avhengighet M = f(s) og mekaniske egenskaper n 2 = f(M) motor (fig. 4.37, a). Samtidig noe belastningsmoment M n kampslipp s 1 , s 2 , s 3 , ..., større enn slips s e , når motoren går på en naturlig karakteristikk (når R ext = 0). Derfor synker steady-state motorturtallet fra n e før P 1 P 2 , P 3 ,... (Fig. 4.37, b). Denne kontrollmetoden kan kun brukes for sleperingmotorer. Den lar deg jevnt endre hastigheten over et bredt område. Dens ulemper er: a) store energitap i kontrollreostaten; b) overdrevent "myke" mekaniske egenskaper til motoren med høy motstand i rotorkretsen. I noen tilfeller er det siste uakseptabelt, siden en liten endring i lastmomentet tilsvarer en betydelig endring i hastigheten.
35 Asynkron generator- dette er en asynkron elektrisk maskin (el. motor) som opererer i generatormodus. Ved hjelp av en drivmotor (i vårt tilfelle en vindturbin) roterer rotoren til en asynkron elektrisk generator i samme retning som magnetfeltet. I dette tilfellet blir rotorens slip negativ, et bremsemoment vises på akselen til den asynkrone maskinen, og generatoren overfører energi til nettverket. For opphisselse elektromotorisk kraft utgangskretsen bruker restmagnetiseringen til rotoren. For dette brukes kondensatorer. Asynkrone generatorer er ikke utsatt for kortslutninger. En asynkron generator er enklere enn en synkron (f.eks. bilgenerator): hvis sistnevnte har induktorer plassert på rotoren, ser rotoren til den asynkrone generatoren ut som et konvensjonelt svinghjul. En slik generator er bedre beskyttet mot smuss og fuktighet, mer motstandsdyktig mot kortslutning og overbelastninger, og utgangsspenningen til den asynkrone generatoren har en lavere grad av ikke-lineær forvrengning. Dette lar deg bruke asynkrone generatorer ikke bare for å drive industrielle enheter som ikke er kritiske for formen på inngangsspenningen, men også for å koble til elektronisk utstyr. Det er en asynkron elektrisk generator som er en ideell strømkilde for enheter med aktiv (ohmsk) belastning: elektriske varmeovner, sveisekonvertere, glødelamper, elektroniske enheter, data- og radioteknikk. Fordeler med en asynkron generator. Disse fordelene inkluderer en lav klarfaktor (harmonisk koeffisient), som karakteriserer den kvantitative tilstedeværelsen av høyere harmoniske i utgangsspenningen til generatoren. Høyere harmoniske forårsaker ujevn rotasjon og ubrukelig oppvarming av elektriske motorer. Synkrongeneratorer kan ha en klarfaktor på opptil 15 %, og klarfaktoren til en asynkrongenerator overstiger ikke 2 %. Dermed produserer en asynkron elektrisk generator praktisk talt bare nyttig energi. En annen fordel med en asynkron generator er at den helt mangler roterende viklinger og elektroniske deler som er følsomme for ytre påvirkninger og ganske ofte er utsatt for skade. Derfor asynkron generator lite slitasje og kan tjene veldig lenge. Utgangen til våre generatorer er umiddelbart 220/380V AC, som kan brukes direkte til husholdningsapparater (for eksempel varmeovner), for å lade batterier, for å koble til et sagbruk, og også for parallelldrift med et tradisjonelt nettverk. I dette tilfellet betaler du for differansen som forbrukes fra nettverket og genereres av vindmøllen. Fordi Siden spenningen kommer umiddelbart til industrielle parametere, trenger du ikke forskjellige omformere (invertere) når vindgeneratoren er direkte koblet til lasten din. Du kan for eksempel koble deg direkte til et sagbruk og, i nærvær av vind, jobbe som om du bare var koblet til et 380V-nettverk. Som du vet, for å redusere bremsetiden ved stopp av produksjonsmaskiner og mekanismer, brukes ofte mekaniske bremser. Redusering av bremsetiden, spesielt ved en kort arbeidssyklus, fører til en betydelig økning i produktiviteten til maskiner og mekanismer. Ulempene med mekaniske bremser er den raske slitasjen av gnideflater, kompleksiteten og behovet for periodisk justering av bremsekraften, behovet for ekstra plass for plassering av bremsen og dens tilkobling til mekanismen. Alle de ovennevnte ulempene elimineres hvis, for de angitte formålene, i stedet for en mekanisk brems, egenskapene til elektriske motorer brukes til å fungere i bremsemodus, det vil si å fungere i hovedsak som en generator og ikke utvikle et dreiemoment, men en bremsemoment. I mange heise- og transportmaskiner (kraner, heiser, rulletrapper, etc.), hvor bevegelse under påvirkning av tyngdekraften er mulig, sikres en konstant, jevn hastighet på senking av laster ved hjelp av bremsemomentet til den elektriske motoren. DC-motorer kan fungere i tre bremsemoduser:
I opposisjonsmodus;
I generatormodus med energiutgang til nettverket;
I modus dynamisk bremsing.
I hvilken som helst av bremsemodusene fungerer den elektriske motoren som en generator, konverterer for eksempel den kinetiske energien til bevegelige deler eller den potensielle energien til en synkende last til elektrisk energi.
36 Når motoren reverseres på farten ved å bytte bryteren, skjer bremsing først fra en gitt hastighet til null, og deretter akselerasjon i den andre retningen. Slik bremsing kan også brukes til bremsing under den såkalte motstand. Under denne reverseringen eller bremsingen har en induksjonsmotor med ekorn-bur betydelige strømmer. Derfor, basert på oppvarmingsforholdene for disse motorene, er antallet reverseringer per time ikke mer enn ti. For å begrense strømmer og øke dreiemomenter, introduseres motstand i faserotorkretsen til en asynkronmotor. La oss vurdere tre hovedmåter for elektrisk bremsing av asynkronmotorer. Bremsing som motstand, som angitt, utføres den når motoren er slått på. I dette tilfellet roterer magnetfeltet i motsatt retning i forhold til motorens rotasjonsretning, og dreiemomentet til motoren bremser - det virker mot rotasjonsretningen. Generator bremsing finner sted når du bytter en flertrinns motor på farten fra en høyere hastighet til en lavere, dvs. når du bytter maskinen fra et mindre antall poler til en større. I det første øyeblikket av bytte viser motorhastigheten seg å være mye større enn hastigheten på feltet, det vil si at slipingen viser seg å være negativ og maskinen bytter til generatormodus. Bremsing skjer med transformasjonen av den kinetiske energien til de roterende delene til elektrisk energi, som minus tap i maskinen gis til nettverket. Generatorbremsing kan også være i heisen når du senker en tung last, og akselererer motoren til en hastighet som overstiger synkron; så begynner maskinen å gi til nettverket energien som blir gitt til den av den synkende lasten. Generatorbremsing er kun mulig ved oversynkron hastighet. Hvis motoren må stoppes ved slutten av bremsingen, bør man ved slutten av bremsingen bytte til mekanisk bremsing eller til en annen type elektrisk bremsing (dynamisk, motsvitsjing). Feste posisjonen på slutten, om nødvendig, utføres bare ved hjelp av en mekanisk brems. På dynamisk bremsing motorens statorvikling er koblet fra trefaset nettverk og er inkludert i nettverket av like- eller enfasevekselstrømmer. I dette tilfellet er forskjellige måter å koble fasene til statorviklingen på. Statorviklingen, drevet av likestrøm, skaper et stasjonært magnetfelt. Akkurat som under normal drift av motoren, drar rotasjonsfeltet rotoren med seg, et stasjonært felt under dynamisk bremsing får rotoren til å stoppe raskt. Kinetisk energi roterende deler omdannes til varme som frigjøres i rotorkretsen på grunn av strømmer indusert i den av det faste statorfeltet. Bremsingens jevnhet sikres ved å regulere spenningen ved statorterminalene.Bremsemomentet til motoren med faserotor kan også reguleres av en reostat i rotorkretsen. Ulempen med dynamisk bremsing er behovet for en lavspent DC-kilde.
37 Synkron maskin- dette er en elektrisk AC-maskin, hvis rotorhastighet er lik rotasjonsfrekvensen til magnetfeltet i luftgapet. Hoveddelene til en synkronmaskin er ankeret og induktoren. Den vanligste utformingen er en der ankeret er plassert på statoren, og det er en induktor på rotoren atskilt fra den med et luftgap. En armatur er en eller flere AC-viklinger. I motorer skaper strømmene som tilføres ankeret et roterende magnetfelt som kobles sammen med feltet til induktoren, og dermed omdannes energien. Armaturfeltet påvirker feltet til induktoren og kalles derfor også ankerreaksjonsfelt. I generatorer opprettes ankerreaksjonsfeltet vekselstrømmer indusert i ankerviklingen fra induktoren. Induktoren består av poler - DC elektromagneter eller permanente magneter (i mikromaskiner). Synkrone maskininduktorer kommer i to forskjellige design: fremtredende pol eller ikke-fremspringende pol. En fremtredende polmaskin utmerker seg ved at polene er uttalte og har en design som ligner polene til en DC-maskin. Med en implisitt poldesign passer eksitasjonsviklingen inn i sporene til induktorkjernen, veldig lik viklingen av rotorene på asynkrone maskiner med en faserotor, med den eneste forskjellen at det er et mellomrom mellom polene som ikke er fylt med ledere (den såkalte stor tann). Ikke-fremspringende stolpedesign brukes i høyhastighetsmaskiner for å redusere den mekaniske belastningen på stolpene. For å redusere den magnetiske motstanden, det vil si for å forbedre passasjen av den magnetiske fluksen, brukes ferromagnetiske kjerner til rotoren og statoren. I utgangspunktet er de en laminert elektrisk stålkonstruksjon (det vil si satt sammen fra separate ark). Elektrisk stål har en rekke interessante egenskaper. Spesielt har den et høyt silisiuminnhold for å øke dens elektriske motstand og derved redusere virvelstrømmer.
Virkningen av et magnetfelt på en strømførende spole gjør det mulig å bruke det til å bestemme magnetisk induksjonsmodul.Å dreie en spole i et magnetfelt indikerer at minst to krefter virker på den. Resultanten av disse kreftene vil påføres ved punktene A og B (fig. 6.8). Dreiemoment, som virker på spolen, vil være lik produktet av en av disse kreftene F̅ til svingens radius r. Dette punktet trenger ikke å beregnes. Det kan måles ved hjelp av en spiralfjær eller annen følsom enhet for måling av mekanisk dreiemoment koblet til spiralen.
Eksperimenter viser at en spole med strøm i et magnetfelt alltid roterer slik at retningen til sin normal n̅ faller sammen med retningen til den magnetiske induksjonen av feltet som studeres B̅. I dette tilfellet vil åpenbart dreiemomentet være null. Den vil ha en maksimal verdi når vinkelen mellom den magnetiske induksjonen B̅ og normalt n̅ vil være 90°.
Magnetisk induksjon kan bestemmes av kraftvirkningen til et magnetfelt på en strøm med en strøm.
Uten å endre strømstyrken i lederen undersøker vi hvordan verdien avhenger maksimalt dreiemoment fra spoleparametrene.
Etter å ha plassert spolen i en viss avstand fra den strømførende lederen, måler vi det maksimale dreiemomentet Mmax for en viss verdi av strøm i en spole jeg 1. La oss doble strømmen i spolen. På I 2 = 2jeg 1 det maksimale mekaniske momentet vil være lik M maks 2 = 2M maks 1. Det samme vil bli observert med en økning i strømstyrken med 3, 4, 5 ganger. På denne måten, maksimal dreiemomentverdi, som virker på spolen med strøm, vil være proporsjonal med strømmen i spolen
Mmax~jeg vit.
Dreiemoment , som virker på en spole i et magnetfelt, er proporsjonal med styrken til strømmen i den.materiale fra nettstedet
Hvis vi erstatter denne spolen med en annen, med et større eller mindre område S vit, vil vi merke en tilsvarende økning eller reduksjon i verdien av det maksimale dreiemomentet. På denne måten,
maksimalt dreiemoment , som virker på en spole i et magnetfelt, er proporsjonal med området:
Mmax~S vit.
Ved å kombinere resultatene fra begge forskningsstadiene får vi
Mmax~jeg vit.S vit.
På denne siden finner du materiell om temaene:
Spenningen U 1 påført fasen til statorviklingen balanseres av hoved-EMF E 1, lekkasje-EMK og spenningsfallet over den aktive motstanden til statorviklingen:
I en rotorvikling vil en lignende ligning se slik ut:
Men siden rotorviklingen er lukket, er spenningen U 2 \u003d 0, og hvis vi også tar i betraktning at E 2s \u003d SE 2 og x 2s \u003d Sx 2, så kan ligningen skrives om som:
![]()
Ligningen for strømmene til en induksjonsmotor gjentar en lignende ligning for en transformator:
28 Asynkron motormoment
Dreiemomentet i en induksjonsmotor skapes av samspillet mellom rotorstrømmen og maskinens magnetiske felt. Dreiemomentet kan uttrykkes matematisk i form av den elektromagnetiske kraften til maskinen:
hvor w 1 =2pn 1 /60 - vinkelfrekvens for rotasjon av feltet. I sin tur, n 1 =f 1 60/R, deretter
![]()
Erstatter i formelen M 1 uttrykk REm=Pe2/S og ved å dele på 9,81 får vi:
![]()
Induksjonsmotorens dreiemomentligning
Det følger at motormomentet er proporsjonalt med de elektriske tapene i rotoren. Erstatt gjeldende verdi i den siste formelen Jeg 2 ’ :
vi får ligningen for dreiemomentet til en induksjonsmotor:
hvor U 1 - fasespenning til statorviklingen.
29 .Motormekanisk karakteristikk kalles rotorhastighetens avhengighet av dreiemomentet på akselen n = f (M2). Siden tomgangsmomentet er lite under belastning, er M2 ≈ M og den mekaniske karakteristikken representert av avhengigheten n = f (M). Hvis vi tar hensyn til forholdet s = (n1 - n) / n1, så kan den mekaniske karakteristikken oppnås ved å presentere dens grafiske avhengighet i koordinatene n og M (fig. 1).
Ris. 1. Mekanisk karakteristikk av asynkronmotor
Naturlig mekanisk karakteristikk av en induksjonsmotor tilsvarer hoved (pass) kretsen for dens inkludering og de nominelle parameterne for forsyningsspenningen. Kunstige egenskaper oppnås hvis noen tilleggselementer er inkludert: motstander, reaktorer, kondensatorer. Når motoren forsynes med en ikke-merket spenning, skiller egenskapene seg også fra den naturlige mekaniske karakteristikken.
Mekaniske egenskaper er et veldig praktisk og nyttig verktøy i analysen av statiske og dynamiske moduser for den elektriske stasjonen.
30 Mekanisk karakteristikk og motorisk selvregulering. Grafen som forbinder mekaniske størrelser - hastighet og dreiemoment - kalles den mekaniske egenskapen til en induksjonsmotor (fig. 7) n = ƒ(M). Selvregulering av en asynkronmotor er som følger. La motoren jobbe jevnt i en eller annen modus, og utvikler hastighet n1 og dreiemoment M1. Med jevn rotasjon er dette momentet lik bremsemomentet M t1, dvs. M1=M t 1, n1 = kons. Økning av bremsemomentet til M2 vil føre til en reduksjon i maskinens hastighet, siden bremsemomentet vil bli større enn dreiemomentet. Med en nedgang i hastigheten øker slipingen, noe som igjen fører til en økning i EMF og strøm i rotoren. Dette øker motorens dreiemoment. Denne prosessen avsluttes når dreiemomentet M2 utviklet av motoren blir lik M t 2. I dette tilfellet settes rotasjonshastigheten lavere enn n1. Egenskapen til automatisk likevekt mellom bremsing og dreiemoment kalles selvregulering.
På et laboratoriestativ er motoren lastet med en elektrisk brems, bestående av en elektromagnet, i gapet som en skive roterer, plantet på motorakselen. Ved å endre spenningen som forsyner elektromagnetspolen med håndtaket på autotransformatoren, er det mulig å endre bremsekraften, hvis øyeblikk er: M TORM \u003d F r (N m)
hvor F er kraften (kraften) som virker på omkretsen av remskiven, (N);
r - remskiveradius, lik 0,18 m. Nyttig kraft på motorakselen:
hvor n- motorens rotasjonshastighet, rpm.
hvor ƒ - nettverksfrekvens (lik 50 Hz),
R- antall par poler av statorviklingen (lik 2).
n 1 - synkron hastighet til det roterende magnetfeltet.
Motorturtallet bestemmes ved hjelp av en turteller. Slip beregnes med formelen:
31 Driftsegenskaper de kaller avhengighetene av kraften som forbrukes av motoren, den forbrukte strømmen I, effektfaktor, motorturtall, effektivitet og dreiemoment M for den nyttige kraften til motoren som avgis på akselen. Ytelsesegenskaper bestemmer de grunnleggende ytelsesegenskapene til en induksjonsmotor. Ytelsesegenskapene til en induksjonsmotor med middels kraft er vist i fig. 8.8. Deres oppførsel er forklart som følger. Ved lett belastning kan motorstrømmen I (ikke-laststrøm) være mellom 20 % og 70 % av merkestrømmen. Når belastningen øker, øker strømmen i rotorkretsen, noe som fører til en nesten proporsjonal økning i strømmen Jeg i statorkretsen.
Fig.8.8 Motormoment () er også nesten proporsjonal med belastningen, men ved høye belastninger blir lineariteten til grafen noe krenket ved å redusere motorhastigheten. Ytelseskarakteristikken uttrykker forholdet mellom kraften som utvikles av motoren og faseforskyvningen mellom statorstrømmen og spenningen. En asynkron motor, som en transformator, bruker en strøm I fra nettverket, som er betydelig ute av fase med den påførte spenningen. For eksempel i hvilemodus. Med en økning i belastningen på motorakselen øker de aktive komponentene i rotoren og statorstrømmene, øker . Maksimalverdien er nådd kl .
Ved ytterligere økning vil verdien synke litt. Dette skyldes en økning i slip s, som forårsaker en økning i reaktansen til rotorviklingen, og følgelig faseforskyvningen . FRAøker og øker, dvs. vil avta.
Oppførselen til driftskarakteristikken er forklart som følger. Verdien av effektivitet bestemmes av forholdet mellom nyttig kraft og kraften som forbrukes fra nettverket.
Verdien kalles effekttapet. I tillegg til tap i stålet til statoren og rotoren på grunn av magnetiseringsreversering og virvelstrømmer, som sammen med mekaniske tap kan betraktes som konstante, er det tap i kobber i en asynkronmotor. ,
de. i stator- og rotorviklingene, som er proporsjonale med kvadratet på strømmen og derfor avhengig av belastningen. Under tomgang, som i en transformator, dominerer tap i stål, siden og er lik tomgangsstrømmen, som er liten. Med små belastninger på akselen forblir tapene i kobber fortsatt små, og derfor bestemmes effektiviteten av formelen ![]() (8.5)
(8.5)
øker kraftig i starten. Når de faste tapene blir lik de lastavhengige tapene , effektivitet når sin maksimale verdi. Med en ytterligere økning i belastningen øker de variable effekttapene betydelig, som et resultat av effektiviteten synker merkbart. Naturen til avhengighet ) kan forklares ut fra relasjonen . Hvis effektiviteten var konstant, så ville det være et lineært forhold mellom og. Men siden effektiviteten avhenger av og denne avhengigheten øker til å begynne med kraftig, og med en ytterligere økning i belastningen endres litt, så vil kurven ) først øker sakte, og deretter øker kraftig.
32 I enhver elektrisk krets må summen av effektene til alle elektriske energikilder være lik summen av effektene til alle mottakere og hjelpeelementer. Etter å ha fått effektuttrykkene tidligere, er det mulig å skrive i en generell form effektbalanseligningen for enhver elektrisk krets:
Σ E → Jeg → + Σ U ← Jeg → = Σ E ← Jeg → + Σ U → Jeg → + Σ Jeg 2 r.
Ligning (1.35) kan skrives både for de reelle EMF-retningene, spenningene og strømmene, og for tilfellet når noen av dem er vilkårlig valgte positive retninger. I det første tilfellet vil alle termer i den være positive, og de tilsvarende elementene i kretsen vil faktisk være kilder eller mottakere av elektrisk energi. Hvis på den annen side noen termer er skrevet med hensyn til vilkårlig valgte positive retninger, må de tilsvarende elementene betraktes som tiltenkte kilder og mottakere. Som et resultat av beregninger eller analyser kan noen av dem vise seg å være negative. Dette vil bety at noen av de antatte kildene faktisk er en vask, og noen av de antatte synkene er en kilde.
33 Starte en asynkronmotor er ledsaget av en forbigående prosess av maskinen assosiert med overgangen til rotoren fra en hviletilstand til en tilstand med jevn rotasjon, der motorens dreiemoment balanserer motstandskreftene på maskinakselen. Ved start av en asynkronmotor er det et økt forbruk av elektrisk energi fra forsyningsnettverket, som ikke bare brukes på å overvinne bremsemomentet som påføres akselen og dekke tap i selve asynkronmotoren, men også på å kommunisere en viss kinetisk energi til de bevegelige delene av produksjonsenheten. Derfor, ved start, må en asynkronmotor utvikle et økt dreiemoment. Til asynkronmotor med faserotor startmomentet, tilsvarende slip sp = 1, avhenger av de aktive motstandene til de justerbare motstandene som er introdusert i rotorkretsen.
Ris. 1. Starte en trefaset asynkronmotor med en faserotor: a - grafer over avhengigheten av dreiemomentet til motoren med en faserotor på slip ved forskjellige aktive motstander av motstander i rotorkretsen, b - diagram over inkludering av motstander og akselerasjonslukkekontakter i rotorkretsen. Så, med lukkede akselerasjonskontakter U1, U2, dvs. når du starter en asynkronmotor med kortsluttede kontaktringer, er startmomentet Mp1 = (0,5 -1,0) Mnom, og startstrømmen Ip = (4,5 - 7) Inom og mer. Et lite startmoment for en asynkron elektrisk motor med en faserotor er kanskje ikke tilstrekkelig til å drive produksjonsenheten og deretter akselerere den, og en betydelig startstrøm vil føre til økt oppvarming av motorviklingene, noe som begrenser frekvensen av dens innkobling. , og i laveffektnettverk fører til uønsket drift av andre mottakere midlertidig spenningsfall. Disse omstendighetene kan være årsaken som utelukker bruken av asynkronmotorer med en faserotor med stor startstrøm for å drive arbeidsmekanismer. Innføringen av justerbare motstander, kalt startmotstander, i motorrotorkretsen reduserer ikke bare startstrømmen, men øker samtidig startmomentet, som kan nå maksimalt dreiemoment Mmax (fig. 1, a, kurve 3) ), hvis den kritiske glidningen til motoren med en faserotor er sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, hvor Rd" er den aktive motstanden til motstanden plassert i fasen av motorens rotorvikling, redusert til fasen av statorviklingen. En ytterligere økning av den aktive motstanden til startmotstanden er upraktisk, siden den fører til en svekkelse av det innledende startmomentet og utgangen av det maksimale dreiemomentpunktet inn i glideområdet s > 1, noe som utelukker muligheten for rotorakselerasjon. Den nødvendige aktive motstanden til motstandene for å starte en motor med en faserotor bestemmes basert på kravene til starten, noe som kan være enkelt når Mp = (0,1 - 0,4) Mnom, normal hvis Mp - (0,5 - 0,75) Mnom, og tung på Mp ≥ Mnom. For å opprettholde et tilstrekkelig stort dreiemoment av motoren med en faserotor under akselerasjonen av produksjonsenheten for å redusere varigheten av den forbigående prosessen og redusere oppvarmingen av motoren, er det nødvendig å gradvis redusere den aktive motstanden til start motstander. Den tillatte dreiemomentendringen under akselerasjon M(t) bestemmes av de elektriske og mekaniske forholdene som begrenser toppmomentgrensen M > 0,85 Mmax, koblingsmomentet M2 > > Ms (fig. 2), samt akselerasjon.
Ris. 2. Startkarakteristikk for en trefaset asynkronmotor med en faserotor. Kobling av startmotstander tilveiebringes ved suksessiv innkobling av akselerasjonskontaktorer Y1, Y2, henholdsvis ved tidspunktene t1, t2, regnet fra det øyeblikk motoren startes, når dreiemomentet M under akselerasjon blir lik koblingsmomentet M2. På grunn av dette, under hele oppstarten, er alle toppmomentene de samme og alle koblingsmomentene er like med hverandre. Siden dreiemomentet og strømmen til en asynkronmotor med en faserotor er gjensidig relatert, er det mulig å stille inn toppstrømgrensen I1 \u003d (1,5 - 2,5) Inom og koblingsstrømmen I2 under akselerasjonen av rotoren, som skal gi koblingsmomentet M2\u003e Mc. Frakobling av asynkronmotorer med faserotor fra forsyningsnettet utføres alltid med kortsluttet rotorkrets, for å unngå overspenninger i fasene til statorviklingen, som kan overstige nominell spenning til disse fasene med 3-4 ganger hvis rotorkretsen er åpen i det øyeblikket motoren slås av.
34 Frekvensregulering. Denne metoden for hastighetskontroll tillater bruk av de mest pålitelige og billigste asynkronmotorene med en ekorn-burrotor. For å endre frekvensen til forsyningsspenningen er det imidlertid nødvendig med en elektrisk strømkilde med variabel frekvens. Som sistnevnte brukes enten synkrone generatorer med variabel hastighet, eller frekvensomformere - elektriske eller statiske, laget på kontrollerte halvlederventiler (tyristorer). For tiden har frekvensomformere en ganske kompleks krets og en relativt høy kostnad. Den raske utviklingen av krafthalvlederteknologi lar oss imidlertid håpe på ytterligere forbedringer av frekvensomformere, noe som åpner for muligheter for utstrakt bruk av frekvensregulering. En detaljert beskrivelse av reguleringslovene for frekvensregulering og en analyse av driften av en asynkronmotor når den drives av en frekvensomformer er gitt i § 4.13 og 4.14. Regulering ved å endre antall stolper. Denne reguleringen lar deg få en trinnvis endring i hastighet. På fig. 4.35 viser den enkleste kretsen (for en fase), som lar deg endre antall poler til statorviklingen to ganger. For å gjøre dette er hver fase av statorviklingen delt inn i to deler, som byttes fra seriekobling til parallell. Det kan sees av figuren at når spolene 1-2 og 3-4 slås på i to parallelle grener, halveres antallet poler, og følgelig dobles rotasjonsfrekvensen til magnetfeltet. Ved veksling halveres antall seriekoblede svinger i hver fase, men siden rotasjonshastigheten dobles, forblir EMF indusert i fasen uendret. Derfor kan motoren ved begge hastighetene kobles til nettverket med samme spenning. For ikke å slå inn rotorviklingen, utføres sistnevnte kortsluttet. Hvis du trenger å ha tre eller fire hastigheter, plasseres en annen vikling på statoren, ved å bytte som du kan få ytterligere to frekvenser. Polskiftende induksjonsmotorer kalles multi-hastighet. Regulering ved å inkludere en reostat i rotorkretsen. Når ytterligere aktive motstander er inkludert i rotorkretsen R ext1, R ext2, R add3 og andre endrer formen for avhengighet M = f(s) og mekaniske egenskaper n 2 = f(M) motor (fig. 4.37, a). Samtidig noe belastningsmoment M n kampslipp s 1 , s 2 , s 3 , ..., større enn slips s e , når motoren går på en naturlig karakteristikk (når R ext = 0). Derfor synker steady-state motorturtallet fra n e før P 1 P 2 , P 3 ,... (Fig. 4.37, b). Denne kontrollmetoden kan kun brukes for sleperingmotorer. Den lar deg jevnt endre hastigheten over et bredt område. Dens ulemper er: a) store energitap i kontrollreostaten; b) overdrevent "myke" mekaniske egenskaper til motoren med høy motstand i rotorkretsen. I noen tilfeller er det siste uakseptabelt, siden en liten endring i lastmomentet tilsvarer en betydelig endring i hastigheten.
35 Asynkron generator- dette er en asynkron elektrisk maskin (el. motor) som opererer i generatormodus. Ved hjelp av en drivmotor (i vårt tilfelle en vindturbin) roterer rotoren til en asynkron elektrisk generator i samme retning som magnetfeltet. I dette tilfellet blir rotorens slip negativ, et bremsemoment vises på akselen til den asynkrone maskinen, og generatoren overfører energi til nettverket. For å eksitere den elektromotoriske kraften i utgangskretsen, brukes den gjenværende magnetiseringen av rotoren. For dette brukes kondensatorer. Asynkrone generatorer er ikke utsatt for kortslutninger. En asynkron generator er enklere enn en synkron (for eksempel en bilgenerator): hvis sistnevnte har induktorer plassert på rotoren, ser rotoren til den asynkrone generatoren ut som et konvensjonelt svinghjul. En slik generator er bedre beskyttet mot smuss og fuktighet, mer motstandsdyktig mot kortslutninger og overbelastninger, og utgangsspenningen til en asynkron generator har en lavere grad av ikke-lineær forvrengning. Dette lar deg bruke asynkrone generatorer ikke bare for å drive industrielle enheter som ikke er kritiske for formen på inngangsspenningen, men også for å koble til elektronisk utstyr. Det er en asynkron elektrisk generator som er en ideell strømkilde for enheter med aktiv (ohmsk) belastning: elektriske varmeovner, sveisekonvertere, glødelamper, elektroniske enheter, datamaskin- og radioteknikk. Fordeler med en asynkron generator . Disse fordelene inkluderer en lav klarfaktor (harmonisk koeffisient), som karakteriserer den kvantitative tilstedeværelsen av høyere harmoniske i utgangsspenningen til generatoren. Høyere harmoniske forårsaker ujevn rotasjon og ubrukelig oppvarming av elektriske motorer. Synkrongeneratorer kan ha en klarfaktor på opptil 15 %, og klarfaktoren til en asynkrongenerator overstiger ikke 2 %. Dermed produserer en asynkron elektrisk generator praktisk talt bare nyttig energi. En annen fordel med en asynkron generator er at den helt mangler roterende viklinger og elektroniske deler som er følsomme for ytre påvirkninger og ganske ofte er utsatt for skade. Derfor er den asynkrone generatoren ikke utsatt for slitasje og kan tjene i svært lang tid. Utgangen til våre generatorer er umiddelbart 220/380V AC, som kan brukes direkte til husholdningsapparater (for eksempel varmeovner), for å lade batterier, for å koble til et sagbruk, og også for parallelldrift med et tradisjonelt nettverk. I dette tilfellet betaler du for differansen som forbrukes fra nettverket og genereres av vindmøllen. Fordi Siden spenningen kommer umiddelbart til industrielle parametere, trenger du ikke forskjellige omformere (invertere) når vindgeneratoren er direkte koblet til lasten din. Du kan for eksempel koble deg direkte til et sagbruk og, i nærvær av vind, jobbe som om du bare var koblet til et 380V-nettverk. Som du vet, for å redusere bremsetiden ved stopp av produksjonsmaskiner og mekanismer, brukes ofte mekaniske bremser. Redusering av bremsetiden, spesielt ved en kort arbeidssyklus, fører til en betydelig økning i produktiviteten til maskiner og mekanismer. Ulempene med mekaniske bremser er den raske slitasjen av gnideflater, kompleksiteten og behovet for periodisk justering av bremsekraften, behovet for ekstra plass for plassering av bremsen og dens tilkobling til mekanismen. Alle de ovennevnte ulempene elimineres hvis, for de angitte formålene, i stedet for en mekanisk brems, egenskapene til elektriske motorer brukes til å fungere i bremsemodus, det vil si å fungere i hovedsak som en generator og ikke utvikle et dreiemoment, men en bremsemoment. I mange heise- og transportmaskiner (kraner, heiser, rulletrapper, etc.), hvor bevegelse under påvirkning av tyngdekraften er mulig, sikres en konstant, jevn hastighet på senking av laster ved hjelp av bremsemomentet til den elektriske motoren. DC-motorer kan fungere i tre bremsemoduser:
I opposisjonsmodus;
I generatormodus med energiutgang til nettverket;
I dynamisk bremsemodus.
I hvilken som helst av bremsemodusene fungerer den elektriske motoren som en generator, konverterer for eksempel den kinetiske energien til bevegelige deler eller den potensielle energien til en synkende last til elektrisk energi.
36 Når motoren reverseres på farten ved å bytte bryteren, skjer bremsing først fra en gitt hastighet til null, og deretter akselerasjon i den andre retningen. Slik bremsing kan også brukes til bremsing under den såkalte motstand. Under denne reverseringen eller bremsingen har en induksjonsmotor med ekorn-bur betydelige strømmer. Derfor, basert på oppvarmingsforholdene for disse motorene, er antallet reverseringer per time ikke mer enn ti. For å begrense strømmer og øke dreiemomenter, introduseres motstand i faserotorkretsen til en asynkronmotor. La oss vurdere tre hovedmåter for elektrisk bremsing av asynkronmotorer. Bremsing som motstand, som angitt, utføres den når motoren er slått på. I dette tilfellet roterer magnetfeltet i motsatt retning i forhold til motorens rotasjonsretning, og dreiemomentet til motoren bremser - det virker mot rotasjonsretningen. Generator bremsing finner sted når du bytter en flertrinns motor på farten fra en høyere hastighet til en lavere, dvs. når du bytter maskinen fra et mindre antall poler til en større. I det første øyeblikket av bytte viser motorhastigheten seg å være mye større enn hastigheten på feltet, det vil si at slipingen viser seg å være negativ og maskinen bytter til generatormodus. Bremsing skjer ved konvertering av den kinetiske energien til de roterende delene til elektrisk energi, som, minus tap i maskinen, gis til nettverket. Generatorbremsing kan også være i heisen når du senker en tung last, og akselererer motoren til en hastighet som overstiger synkron; så begynner maskinen å gi til nettverket energien som blir gitt til den av den synkende lasten. Generatorbremsing er kun mulig ved oversynkron hastighet. Hvis motoren må stoppes ved slutten av bremsingen, bør man ved slutten av bremsingen bytte til mekanisk bremsing eller til en annen type elektrisk bremsing (dynamisk, motsvitsjing). Feste posisjonen på slutten, om nødvendig, utføres bare ved hjelp av en mekanisk brems. På dynamisk bremsing motorens statorvikling er koblet fra det trefasede nettverket og koblet til DC eller enfase AC-nettverket. I dette tilfellet er forskjellige måter å koble fasene til statorviklingen på. Statorviklingen, drevet av likestrøm, skaper et stasjonært magnetfelt. Akkurat som under normal drift av motoren, drar rotasjonsfeltet rotoren med seg, et stasjonært felt under dynamisk bremsing får rotoren til å stoppe raskt. Den kinetiske energien til de roterende delene omdannes til varme som frigjøres i rotorkretsen på grunn av strømmene indusert i den av det faste statorfeltet. Bremsingens jevnhet sikres ved å regulere spenningen ved statorterminalene.Bremsemomentet til motoren med faserotor kan også reguleres av en reostat i rotorkretsen. Ulempen med dynamisk bremsing er behovet for en lavspent DC-kilde.
37 Synkron maskin- dette er en elektrisk AC-maskin, hvis rotorhastighet er lik rotasjonsfrekvensen til magnetfeltet i luftgapet. Hoveddelene til en synkronmaskin er ankeret og induktoren. Den vanligste utformingen er en der ankeret er plassert på statoren, og det er en induktor på rotoren atskilt fra den med et luftgap. En armatur er en eller flere AC-viklinger. I motorer skaper strømmene som tilføres ankeret et roterende magnetfelt som kobles sammen med feltet til induktoren, og dermed omdannes energien. Armaturfeltet påvirker feltet til induktoren og kalles derfor også ankerreaksjonsfelt. I generatorer skapes ankerreaksjonsfeltet av vekselstrømmer indusert i ankerviklingen fra induktoren. Induktoren består av poler - DC elektromagneter eller permanente magneter (i mikromaskiner). Synkrone maskininduktorer kommer i to forskjellige design: fremtredende pol eller ikke-fremspringende pol. En fremtredende polmaskin utmerker seg ved at polene er uttalte og har en design som ligner polene til en DC-maskin. Med en implisitt poldesign passer eksitasjonsviklingen inn i sporene til induktorkjernen, veldig lik viklingen av rotorene på asynkrone maskiner med en faserotor, med den eneste forskjellen at det er et mellomrom mellom polene som ikke er fylt med ledere (den såkalte stor tann). Ikke-fremspringende stolpedesign brukes i høyhastighetsmaskiner for å redusere den mekaniske belastningen på stolpene. For å redusere den magnetiske motstanden, det vil si for å forbedre passasjen av den magnetiske fluksen, brukes ferromagnetiske kjerner til rotoren og statoren. I utgangspunktet er de en laminert elektrisk stålkonstruksjon (det vil si satt sammen fra separate ark). Elektrisk stål har en rekke interessante egenskaper. Spesielt har den et høyt silisiuminnhold for å øke dens elektriske motstand og derved redusere virvelstrømmer.
Vi anbefaler deg å lese
 Psykologiske kjennetegn ved barn i ungdomsårene
Psykologiske kjennetegn ved barn i ungdomsårene Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole
Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole, diagnose, behandling Behandling av urogenital klamydia") Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia
Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva
Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva

