Send ditt gode arbeid i kunnskapsbasen er enkelt. Bruk skjemaet nedenfor
Studenter, hovedfagsstudenter, unge forskere som bruker kunnskapsbasen i studiene og arbeidet vil være deg veldig takknemlig.
Vert på http://www.allbest.ru/
ukrainsk statlig akademi jernbanetransport
Senter for vitenskapelig og praktisk opplæring
fra faget "Elektroteknikk"
"Motor likestrøm med parallell eksitasjon
Plan
1. Introduksjon
2. DC motor design
3. Starte motorer
4. Tekniske data for motorer
5. Egenskaper til DC-motor
6. Mekanisk karakteristikk
7. Liste over brukt litteratur
En DC-motor (DC-motor) er en omformer av likestrøms elektrisk energi til mekanisk energi. Utformingen av motoren er vist i fig.1. Den har tre hoveddeler: statoren (induktoren), armatur og kollektor.
Induktoren (1) - den faste delen av maskinen, er en hul støpt stålsylinder laget av elektrisk stål, som innsiden kjerner (staver) festes med bolter. På kjernene er det en eksitasjonsvikling (OB) koblet til børstene. Induktoren er designet for å lage hoveddelen magnetfelt. Ankeret (2) (roterende indre del av maskinen) er en sylinder satt sammen av stålplater. En ankervikling legges i ankerets spor. Samleren (3) er festet på samme aksel med ankeret, som er en hul sylinder som består av individuelle kobberplater (lameller) isolert fra hverandre og fra ankerakselen og elektrisk koblet til individuelle deler av ankerviklingen. Hensikten med kollektoren er den mekaniske rettifiseringen av variable sinusformede EMF-er til en konstant spenning i størrelse og retning, som fjernes til den eksterne kretsen ved hjelp av børster ved siden av kollektoren. Egenskapene til DC-motorer bestemmes hovedsakelig av måten feltviklingen drives på. I denne forbindelse er likestrømsmotorer klassifisert i 2 typer: med uavhengig opphisselse(fig. 2a) og selveksitasjon (fig. 2 b, c, d)
Eksitasjonsviklingen i en DCT med uavhengig eksitering drives av en separat DC-kilde (fra en halvlederlikeretter, batteri eller exciter - DC-generator).
I selveksiterte DCT-er er anker- og induktorkretsene elektrisk koblet, dvs. eksitasjonsviklingen drives av EMF til armaturet til maskinen.
Avhengig av elektrisk krets koblingene til armaturviklingene og induktoren til en maskin med selveksitasjon er videre delt inn i tre typer: parallell, serie og blandet eksitasjon (fig. 2 b, c, d). DPT, som alle elektriske maskiner, er reversibel, d.v.s. de er uten vesentlige konstruktive
endringer kan fungere både i generatorens modus og i motorens modus. DPT driftsmodus med parallell eksitasjon. Tenk på driften av en DPT med parallell eksitasjon (fig. 2b). Når motoren er koblet til et DC-nettverk, oppstår det strømmer i begge viklingene. I dette tilfellet, i eksitasjonsviklingen, skaper eksitasjonsstrømmen IB et magnetfelt til induktoren.
Samspillet mellom ankerstrømmen og magnetfeltet til induktoren skaper et elektromagnetisk øyeblikk av ME.
ME = sFIYA, (1)
hvor c er en konstant koeffisient;
IЯ - armaturstrøm;
Ф - magnetisk fluks.
Det elektromagnetiske øyeblikket til ME skiller seg fra øyeblikket til MW på motorakselen ved verdien av øyeblikket med tomgangstap MHH, som på grunn av sin litenhet kan neglisjeres og antas at
En bak-EMF E induseres i lederne til det roterende ankeret:
hvor n er rotasjonshastigheten til ankeret;
k er en konstant faktor.
Den elektriske likevektsligningen til motoren har formen:
U \u003d E + IЯ RY \u003d knФ + IЯ RY, (3)
hvor U er nettspenningen.
Starter motoren
Ved start av motoren er ankeret stasjonært i det første øyeblikket (n = 0) og gitt (2) EMF for ankeret E = knF = 0. I dette tilfellet, i henhold til (3), er startstrømmen til anker IYaP uakseptabelt stor, fordi R er liten og er definert som:
Derfor, for å begrense startstrømmen, blir motstanden til startreostaten RP introdusert i serie i ankerkretsen, som er fullstendig introdusert før motoren startes og gis ut etter at motoren akselererer når den bakre EMF (E) øker.
En slik start av motoren beskytter armaturviklingen mot høye startstrømmer INP og lar deg få maksimal magnetisk fluks i denne modusen.
Hvis motoren startes på tomgang, er det ikke nødvendig å utvikle maksimalt dreiemoment MB på akselen. Derfor kan motoren startes ved jevnt å øke forsyningsspenningen U.
Reverseringmotor.
Endring av rotasjonsretningen til motoren kan oppnås ved å endre strømmen enten i ankerviklingen eller i feltviklingen, fordi. dette endrer tegnet på dreiemomentet. Samtidig endring i strømretningen i begge viklingene endrer ikke rotasjonsretningen til motoren. Bytte av endene av viklingene bør bare utføres etter at motoren har stoppet helt.
Reguleringhastighetrotasjon.
Fra uttrykk (3) er det mulig å bestemme rotasjonshastigheten til motoren:
motorens likestrømforsyningsvikling
Det kan sees av formel (6) at rotasjonshastigheten til en likestrømsmotor kan styres ved å endre nettspenningen, den magnetiske eksitasjonsfluksen og motstanden til ankerkretsen. Den vanligste måten å kontrollere rotasjonshastigheten til motoren på er å endre den magnetiske fluksen ved hjelp av en justerende reostat i eksitasjonskretsen.
Redusering av eksitasjonsstrømmen svekker den magnetiske fluksen og øker rotasjonshastigheten til motoren. Denne metoden er økonomisk, fordi eksitasjonsstrømmen (i parallelle magnetiseringsmotorer) er 3-5 % av ankeret IN, og varmetapene i kontrollreostaten er svært små. Hovedtrekk ved likestrømsmotor med parallell magnetisering
Driften av en likestrømsmotor med parallell eksitasjon blir evaluert av følgende hovedegenskaper:
Tomgangskarakteristikk: (fig.3)
n0 = ѓ (IB), med U = UN = const og IЯ = I0,
hvor n0 er tomgangshastigheten (ingen belastning),
I0 - tomgangsstrøm på 5 - 10% IH;
FN - Nominell verdi nettspenning.
Når man tar i betraktning at ved tomgang er produktet IЯRЯ lite sammenlignet med U, så fra (6) bestemmes motorhastigheten av det omvendte forholdet til den magnetiske fluksen Ф:
Med en økning i strømmen i eksitasjonsviklingen endres den magnetiske fluksen langs magnetiseringskurven Ф = ѓ (IВ), så forholdet mellom motorrotasjonshastigheten n og eksitasjonsstrømmen IВ er nesten hyperbolsk. Ved lave verdier av eksitasjonsstrømmen endres omdreiningene nesten omvendt. Ved høye eksitasjonsstrømmer,
den magnetiske metningen av stålpolene har effekt, og kurven blir flatere og går nesten parallelt med abscisseaksen. En skarp endring - en reduksjon i eksitasjonsstrømmen, samt et utilsiktet avbrudd av magnetiseringskretsen i henhold til (9) kan føre til at motoren "kjører" (når IВ > 0, og derfor har Ф også en tendens til 0, n > ?).
Mekanisk karakteristikk. Dette er avhengigheten av rotorrotasjonshastigheten på MV-momentet på motorakselen ved konstant nettspenning og eksitasjonsstrøm:
n \u003d ѓ (MV), med U \u003d UH \u003d const, IВ \u003d const.
For en parallell magnetiseringsmotor er momentet MV proporsjonalt med den første graden av ankerstrømmen IЯ. Derfor kan den mekaniske karakteristikken representeres av avhengigheten n (Ib), som kalles elektromekanisk eller hastighet (fig. 4).
En belastning (bremsemoment) påføres motorakselen. I følge (6), ved konstante verdier av eksitasjonsstrømmen, er en reduksjon i rotasjonshastigheten n en konsekvens av spenningsfallet i ankerkretsen - IЯ·RЯ og ankerreaksjonen. Med en økning i belastningen synker rotasjonshastigheten med en ubetydelig mengde, i størrelsesorden 3-8%. Denne hastighetskarakteristikken kalles rigid. Reguleringskarakteristikk (fig. 5). Dette er avhengigheten av eksitasjonsstrømmen IB på ankerstrømmen IA ved konstant spenning nettverk U og konstant rotasjonshastighet n:
IВ \u003d ѓ (IЯ) ved U \u003d UN, n \u003d const.
Fra analysen av den ytre karakteristikken kan man se at rotasjonshastigheten avtar med økende belastning.
Kontrollkarakteristikken gjør det mulig å bedømme hvordan, innenfor hvilke grenser det er nødvendig å regulere strømmen i eksitasjonsviklingen for å opprettholde en konstant rotasjonshastighet.
Eksperimentell teknikk
Studiet av driftsmodusene til DPT med parallell eksitasjon utføres på
modulært utdanningskompleks MUK-EP1, som består av:
DC motor strømforsyning BPP1;
Strømforsyningsenhet for asynkronmotor BPA1
Elektrisk maskinenhet MA1-AP.
PL073U3 (220V, 180 W,
1500 rpm). Automatisk veksling av motorviklinger og tilkobling av måling
enheter utføres i blokk BPP1.
Brukes som last asynkron motor(BP) i modusen dynamisk bremsing. Automatisk veksling av BP-viklinger og tilkobling måleinstrumenter til det utføres i blokken BPA1.
Opplegget for drift av komplekset etter bytte av blokker er vist i fig.
Bibliografi
1. Katsman M.M. Elektriske biler. - M.: Høyere. skole, 1993.
2. Kopylov I.P. Elektriske biler. - M.: Energoatomizdat, 1986
Vert på Allbest.ru
...Lignende dokumenter
Prinsippet for drift og enheten til DC-generatorer. Elektromotorisk kraft og elektromagnetisk dreiemoment til DC-generatoren. Metoder for eksitering av DC-generatorer. Funksjoner og egenskaper til motorer forskjellige typer opphisselse.
abstrakt, lagt til 11.12.2009
Hastighetskontroll av DC-motorer ved å endre eksitasjonsfluksen. Maksimal strømbeskyttelse av den elektriske stasjonen. Motorens hastighetsegenskaper. Skjemaer av strømkretser for DC-motorer og asynkrone motorer.
semesteroppgave, lagt til 30.03.2014
Prinsippet for drift av DC-generatoren. Ankerviklinger og prosessen med eksitering av DC-maskiner. Vikling med "død" seksjon. Et eksempel på en enkel sløyfe og bølgevikling. DC motor med sekvensiell eksitasjon.
presentasjon, lagt til 11.09.2013
Design og operasjonsprinsipp elektriske maskiner likestrøm. Studie av last, ytre og kontrollegenskaper og driftsegenskaper til en generator med uavhengig magnetisering. Funksjoner ved å starte en motor med et parallelt eksitasjonssystem.
laboratoriearbeid, lagt til 02.09.2014
Studie av de mekaniske egenskapene til DC-motorer med parallell, uavhengig og serieeksitasjon. bremsemoduser. elektrisk motor vekselstrøm med faserotor. Studie av motorstartkretser, tidsfunksjoner.
laboratoriearbeid, lagt til 23.10.2009
Prinsippet for drift og enheten til DC-generatoren. Typer armaturviklinger. Metoder for eksitering av DC-generatorer. Reversibilitet av DC-maskiner. Motor av parallell, uavhengig, serie og blandet eksitasjon.
abstrakt, lagt til 17.12.2009
DC motor design. Kjernen til de viktigste plussene, typen og stigningen til armaturviklingen. Antall viklingssvinger, samleplater, spor. Motormagnetiseringskarakteristikk. Massen til armaturviklingstrådene og de viktigste dynamiske indikatorene.
semesteroppgave, lagt til 21.05.2012
Strømforsyning til motoren under hastighetsregulering ved å endre spenningsverdien fra en separat regulert DC-kilde. Anvendelse av tyristoromformere i likestrøms elektriske frekvensomformere. Strukturopplegg tyristor omformer.
semesteroppgave, lagt til 02.01.2015
Modellering av starten av DC-motoren DP-62 for kjøring av ingot-vognen ved hjelp av SciLab-pakken. Blokkdiagram av modellen, dens elementer. Passdata for DP-62-motoren, type eksitasjon. Transient diagram, plotting.
laboratoriearbeid, lagt til 18.06.2015
Funksjoner ved beregningen av DC-motoren fra posisjonen til kontrollobjektet. Beregning av tyristoromformer, elektriske drivsensorer og strømsensor. Opplegg av en DC-motor med uavhengig eksitasjon. Modellering av den ytre konturen.
Kapittel 29
Enkle konsepter
M, roterende.
antielektromotiv
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
Men ifølge (25.24),
![]()
![]() , (29.4)
, (29.4)
![]() .
.
M, .
dvs. U eller reduksjon i flyt F ;
u, F
F
Motorstart
U .
starter reostater
R O 1
![]() .
.
Samtidig gjennom spaken R og dekk W R,
,
M direkte proporsjonal med flyt F F
Kapittel 29
Enkle konsepter
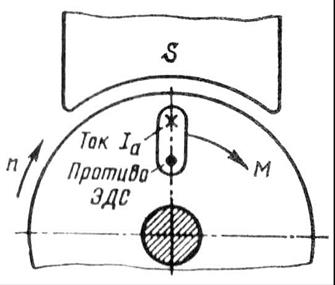
Samlermaskiner har egenskapen reversibilitet, det vil si at de kan fungere både i generatormodus og i motormodus. Derfor, hvis en DC-maskin er koblet til en DC-strømkilde, vil strømmer vises i eksitasjonsviklingen og i armaturviklingen til maskinen. Samspillet mellom ankerstrømmen og eksitasjonsfeltet skaper et elektromagnetisk moment på ankeret M, som ikke bremser, slik tilfellet var i generatoren, men roterende.
Under påvirkning elektromagnetisk dreiemoment anker, vil maskinen begynne å rotere, det vil si at maskinen vil fungere i motormodus, forbruke elektrisk energi fra nettverket og konvertere den til mekanisk energi. Under driften av motoren roterer ankeret i et magnetfelt. En EMF induseres i armaturviklingen, hvis retning kan bestemmes av "høyrehånds"-regelen. I sin natur skiller den seg ikke fra EMF indusert i generatorens armaturvikling. I motoren er EMF rettet mot strømmen, og derfor kalles det antielektromotiv kraft (back-EMF) til armaturet (fig. 29.1).
For en motor som kjører med konstant hastighet,
![]() .
(29.1)
.
(29.1)
Av (29.1) følger det at spenningen som tilføres motoren balanseres av bakre EMF til ankerviklingen og spenningsfallet i ankerkretsen. Basert på (29.1) ankerstrøm
Multipliserer begge sider av ligning (29.1) med armaturstrøm , får vi effektligning for ankerkrets:
![]() , (29.3)
, (29.3)
hvor er kraften i ankerviklingskretsen; - kraft av elektriske tap i ankerkretsen.
For å klargjøre essensen av uttrykket, vil vi utføre følgende transformasjon:
![]() ,
,
![]() .
.
Men ifølge (25.24),
![]()
![]() , (29.4)
, (29.4)
hvor er vinkelfrekvensen for rotasjon av ankeret; - elektromagnetisk kraft til motoren.
Derfor er uttrykket motorens elektromagnetiske kraft.
Transformering av uttrykk (29.3) under hensyntagen til (29.4), får vi
![]() .
.
En analyse av denne ligningen viser at med en økning i belastningen på motorakselen, dvs. med en økning i det elektromagnetiske dreiemomentet M,øker effekten i ankerviklingskretsen, dvs. kraften ved motorinngangen. Men siden spenningen som tilføres motoren opprettholdes uendret, er økningen i motorbelastning ledsaget av en økning i strømmen i ankerviklingen .
Avhengig av eksiteringsmetoden er likestrømsmotorer, så vel som generatorer, delt inn i motorer med eksitasjon fra permanente magneter (magnetoelektrisk) og med elektromagnetisk eksitasjon. Sistnevnte, i samsvar med skjemaet for å slå på eksitasjonsviklingen i forhold til ankerviklingen, er delt inn i parallelle (shunt), serier (seriell) og blandede (sammensatte) eksitasjonsmotorer.
I henhold til EMF-formelen, motorhastighet (rpm)
Ved å erstatte verdien fra (29.1), får vi (rpm)
dvs. motorhastigheten er direkte proporsjonal med spenningen og omvendt proporsjonal med eksitasjonsfluksen. Fysisk er dette forklart av det faktum at økningen i spenning U eller reduksjon i flyt F forårsaker en økning i forskjellen ; dette fører igjen til en økning i strømmen [se fig. (29.2)]. Som et resultat øker den økte strømmen dreiemomentet, og hvis belastningsmomentet forblir uendret, øker motorhastigheten.
Fra (29.5) følger det at motorhastigheten kan kontrolleres ved å endre enten spenningen u, leveres til motoren, eller den magnetiske hovedfluxen F, eller elektrisk motstand i ankerkretsen.
Rotasjonsretningen til ankeret avhenger av retningene til den magnetiske eksitasjonsfluksen F og strøm i armaturviklingen. Derfor, ved å endre retningen til noen av disse mengdene, kan du endre rotasjonsretningen til ankeret. Det bør huskes at å bytte de vanlige terminalene til kretsen ved knivbryteren ikke endrer rotasjonsretningen til ankeret, siden dette samtidig endrer retningen til strømmen i både ankerviklingen og eksitasjonsviklingen.
Motorstart
Motorankerstrømmen bestemmes av formel (29.2). Hvis godta U og uendret, så avhenger strømmen av bak-EMF . Strømmen når sin maksimale verdi når motoren startes. Ved det første startøyeblikket er motorarmaturet stasjonært og ingen EMF induseres i viklingen. Derfor, når motoren er direkte koblet til nettverket, oppstår det en startstrøm i viklingen av ankeret
Vanligvis er motstanden liten, så verdien av startstrømmen når uakseptabelt store verdier, 10-20 ganger høyere enn merkestrøm motor.
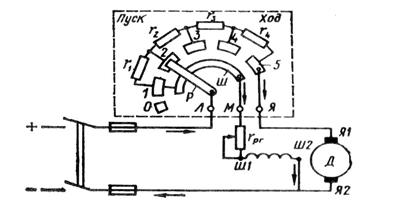
En så stor startstrøm er veldig farlig for motoren. For det første kan det forårsake en allsidig brann i maskinen, og for det andre, med en slik strøm, utvikles det et for stort startmoment i motoren, som har en sjokkeffekt på de roterende delene av motoren og kan ødelegge dem mekanisk. Og til slutt forårsaker denne strømmen et kraftig spenningsfall i nettverket, noe som påvirker driften til andre forbrukere som er inkludert i dette nettverket negativt. Derfor brukes vanligvis start av motoren ved direkte tilkobling til nettverket (ikke-reostatisk start) for motorer med en effekt på ikke mer enn 0,7-1,0 kW. I disse motorene, på grunn av den økte motstanden til armaturviklingen og små roterende masser, er startstrømverdien bare 3-5 ganger høyere enn merkestrømmen, noe som ikke utgjør en fare for motoren. Når det gjelder motorer med større kraft, bruker de til å begrense startstrømmen når de starter dem. starter reostater(PR), inkludert i serie i ankerkretsen (reostatisk start).
Før du starter motoren trenger du en spak R sett reostaten på tomgangskontakt O(Fig. 29.2). Slå deretter på knivbryteren, flytt spaken til den første mellomkontakten 1
og motorarmaturkretsen er koblet til nettverket gjennom den høyeste motstanden til reostaten ![]() .
.
Ris. 29.2. Opplegg for å slå på startreostaten
Samtidig gjennom spaken R og dekk W en eksitasjonsvikling er koblet til nettverket, hvor strømmen under hele oppstartsperioden ikke er avhengig av spakens posisjon R, siden motstanden til bussen er ubetydelig sammenlignet med motstanden til eksitasjonsviklingen.
Startarmaturstrøm ved impedansen til startreostaten
Med ankomsten av strøm i ankerkretsen oppstår et startmoment, under påvirkning av hvilken rotasjonen av ankeret begynner. Når hastigheten øker, øker tilbake-emf , som fører til en reduksjon i startstrøm og startmoment.
Når motorankeret akselererer, skiftes startreostatspaken til posisjon 2, 3 osv. I posisjon 5 på reostatspaken avsluttes motorstarten. Motstanden til startreostaten velges vanligvis slik at den største startstrømmen overskrider merkestrømmen med ikke mer enn 2-3 ganger.
Siden motorens dreiemoment M direkte proporsjonal med flyt F[cm. (25.24)], så for å lette starten av motoren med parallell og blandet eksitasjon, bør motstanden til reostaten i eksitasjonskretsen fjernes fullstendig. eksitasjonsflyt F i dette tilfellet får høyeste verdi og motoren utvikler det nødvendige dreiemomentet ved en lavere ankerstrøm.
Det er ikke tilrådelig å bruke startreostater for å starte motorer med større effekt, da dette vil føre til betydelige energitap. Også startreostater ville være store. Derfor, i motorer med høy effekt, brukes en reostatfri start av motoren ved å senke spenningen. Eksempler på dette er å starte trekkmotorene til et elektrisk lokomotiv ved å bytte dem fra seriell tilkobling ved start parallelt med normal operasjon(se § 29.6) eller start av motoren i en generator-motorkrets (se § 29.4).
Parallell eksitasjonsmotor
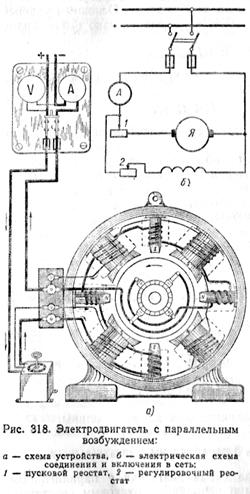
Opplegget for å koble en parallell magnetiseringsmotor til nettverket er vist i fig. 29,3, en. Et karakteristisk trekk ved denne motoren er at strømmen i feltviklingen (OB) ikke er avhengig av belastningsstrømmen (armaturstrømmen). Reostaten i eksitasjonskretsen tjener til å regulere strømmen i eksitasjonsviklingen og den magnetiske fluksen til hovedpolene.
Ytelsesegenskapene til en motor bestemmes av dens driftsegenskaper, som forstås som avhengigheten av rotasjonshastigheten n, strøm Jeg, nyttig øyeblikk M2, dreiemoment M fra strømmen på motorakselen R 2 ved og (fig. 29.3, 6 ).
For å analysere avhengigheten og , som vanligvis kalles hastighetskarakteristikken, går vi til formel (29.5), hvorfra det kan sees at med en konstant spenning U to faktorer påvirker hastigheten: spenningsfallet i ankerkretsen og eksitasjonsfluksen F. Med en økning i belastningen synker telleren, mens på grunn av ankerreaksjonen reduseres også nevneren F. Vanligvis er reduksjonen i strømning forårsaket av ankerreaksjon liten og den første faktoren påvirker hastigheten mer enn den andre. Som et resultat, motorhastigheten med økende belastning R 2 avtar, og grafen får en fallende form med en liten bule vendt mot x-aksen. Hvis reaksjonen til ankeret i motoren er ledsaget av en mer betydelig svekkelse av strømmen F, så vil rotasjonshastigheten øke med økende belastning, som vist med den stiplede kurven i fig. 29,3, b. Imidlertid er en slik avhengighet uønsket, siden den som regel ikke tilfredsstiller betingelsen for stabil drift av motoren: med en økning i belastningen på motoren øker rotasjonshastigheten, noe som fører til en ytterligere økning i motoren. belastning osv., dvs. rotasjonshastigheten n motoren øker i det uendelige og motoren blir "overopphetet". For å gi hastighetskarakteristikken en fallende kurveform bruker noen shuntmotorer en lett (med et lite antall svinger) serieeksitasjonsvikling, som kalles stabiliserende vikling. Når denne viklingen er slått på i koordinering med den parallelle eksitasjonsviklingen, kompenserer dens MMF for demagnetiseringseffekten av ankerreaksjonen slik at fluksen F forblir praktisk talt uendret over hele lastområdet .., siden
Hvis vi neglisjerer ankerreaksjonen, så (siden ) kan vi godta . Da er den mekaniske karakteristikken til den parallelle eksitasjonsmotoren en rett linje, noe skrånende til abscisseaksen (fig. 29.4, en). Hellingsvinkelen til den mekaniske karakteristikken er jo større, jo større er verdien av motstanden som er inkludert i ankerkretsen. Den mekaniske egenskapen til motoren i fravær av ekstra motstand i ankerkretsen kalles naturlig(rett 1 ). De mekaniske egenskapene til motoren, oppnådd ved å introdusere ekstra motstand i ankerkretsen, kalles kunstig(direkte 2 og 3 ).
Typen av mekanisk karakteristikk avhenger også av verdien av den magnetiske hovedfluksen F. Så når du reduserer F rotasjonshastigheten x.x øker. og øker samtidig, dvs. begge ligningsleddene (29.11) øker. Dette fører til en kraftig økning i helningen til den mekaniske karakteristikken, det vil si en reduksjon i dens stivhet (fig. 29.4, b).
Når ankerspenningen endres U rotasjonshastigheten endres, men forblir uendret. Som et resultat endres ikke stivheten til den mekaniske karakteristikken (hvis vi neglisjerer påvirkningen av ankerreaksjonen) (fig. 29.4, i), dvs. egenskapene skifter i høyden mens de forblir parallelle med hverandre.
§ 138. ELEKTRISK MOTOR MED PARALLELL EKSITERING
På fig. 318 viser et diagram av en motor med parallell eksitasjon og en startreostat inkludert i ankerkretsen. Siden eksitasjonsviklingen er koblet parallelt med nettverket, når konstant motstand magnetiseringskretsen og nettspenningen, den magnetiske fluksen F til motoren må være konstant.
Fra formelen
det kan sees at verdien av mot-e. d.s. motoren avtar med økende ankerstrøm, noe som fører til at motorhastigheten også reduseres.
Men som nevnt tidligere er størrelsen på spenningsfallet i armaturviklingen I a r a svært liten sammenlignet med spenningen U. Derfor, med en økning i laststrømmen, synker motorhastigheten litt.
Derfor er en karakteristisk egenskap for en motor med parallell eksitasjon en nesten konstant rotasjonshastighet når belastningen på akselen endres. Vanligvis reduseres hastigheten til motorer av denne typen med bare 3-5% når full belastning er nådd.
Dreiemomentet til motoren er proporsjonalt med produktet av ankerstrømmen og den magnetiske fluksen:
Fra dette kan man se at dreiemomentet til motoren med parallell eksitasjon er proporsjonal med ankerstrømmen:
Derfor, ved hjelp av amperemeteret som er inkludert i ankerkretsen, kan man bedømme motorbelastningen.
Motoren vil ha det høyeste turtallet på tomgang hvis motstanden til justeringsreostaten er fullstendig fjernet. Åpning av eksitasjonskretsen vil føre til at motorens magnetiske fluks reduseres til en ubetydelig mengde restmagnetisme. Siden mot-e. d.s. bør være nesten lik nettspenningen, så med en reduksjon i den magnetiske fluksen vil motorens rotasjonshastighet øke kraftig og bli farlig for den mekaniske styrken til motoren. Derfor, når du bruker motoren, er det nødvendig å overvåke den gode tilstanden til eksitasjonskretsen.
Hastighetskontroll av en shuntmotor gjøres vanligvis ved å variere fluksen med en variabel reostat i feltkretsen. Denne hastighetskontrollmetoden er den mest økonomiske. Noen motorer har hastighetskontroll fra 1,5:1 til 4:1. Tallene viser forholdet mellom maksimal hastighet og minimum. Reguleringsgrensene begrenses hovedsakelig av forverring av bryterforholdene og den mekaniske styrken til ankeret.
Endring av rotasjonsretningen til motorer med parallell eksitering kan gjøres ved å endre retningen på strømmen i magnetiseringsviklingen til polene eller ved å endre retningen på strømmen i ankerviklingen. Vanligvis utføres rotasjonsendringen på den andre måten, siden enhver operasjon med eksitasjonsviklingen er farlig for driftspersonellet og uønsket på grunn av utseendet til f.eks. d.s. selvinduksjon, noe som kan forårsake sammenbrudd av viklingsisolasjonen og brenning av kontaktene.
Motorer med parallell eksitasjon brukes i likestrømsnettverk for å drive noen maskiner, mekanismer (overliggende elektriske veier, pumper, vifter, vevemaskiner, valseverk, gruveheiser) som krever konstant rotasjonshastighet eller bred hastighetsjustering.
23 .Ankerreaksjon, sin Negativ påvirkning på driften av en DC-motor, måter å kompensere for ankerreaksjonen.
Armaturreaksjon - effekten av magnetfeltet skapt av ankerstrømmen på magnetfeltet til maskinens hovedpoler. I hvilemodus dannes armaturstrømmen = 0 og magnetfeltet til maskinen kun av hovedpolene (fig (a)). Den er symmetrisk om hovedpolenes akse og om den geometriske nøytralen. Hvis du slår av eksitasjonsviklingen og kobler ankeret til strømforsyning, da vil strømmen som flyter i armaturviklingen skape et magnetfelt vist i figur (b). aksen til polene til dette feltet faller sammen med aksen til børstene og er vinkelrett på aksen til feltet til hovedpolene. Rotasjonen av ankeret påvirker ikke mønsteret til ankerfeltet, fordi strømfordelingen i armaturviklingen forblir konstant. I driftsmodusen til maskinen slås begge viklingene på og magnetfeltet dannes ved å summere begge feltene. Som et resultat blir magnetfeltets akse rotert med noen vinkler, den fysiske nøytralen roteres med samme vinkel. I motormodus skiftes nøytralen mot rotasjon. Som et resultat av forskyvningen vil en del av lederne til den parallelle grenen som ligger mellom børsten og nøytralen være under polen med motsatt polaritet og vil skape et bremsemoment. En endring i belastningen til maskinen vil føre til en endring i ankerstrømmen og en tilsvarende økning eller reduksjon i magnetfeltet. Derfor vil vinkelen endres med belastningen.I tillegg til nøytral forskyvning, reduserer ankerreaksjonen den totale magnetiske fluksen på grunn av at feltet under hovedpolene er forvrengt. Under den ene kanten av polen svekkes den, og under den andre øker den, men feltstyrken på grunn av metning av polkanten er mindre enn svekkelsen og den resulterende magnetiske fluksen avtar, noe som negativt påvirker energiytelsen til polen. maskin.Forskyvningen av den fysiske nøytralen har også en negativ innvirkning på bytteprosessen. Den mest effektive . midler for å redusere påvirkningen av ankerreaksjonen er kompensasjonsvikling. Den passer inn i de spesielle sporene til hovedpolene og er koblet i serie til ankerkretsen. Det magnetiske feltet til kompensasjonsviklingen er motsatt og kompenserer det magnetiske feltet til ankeret. Kompensasjonsviklingsstrøm = armaturstrøm, så kompensasjon skjer i alle moduser fra tomgang til full belastning. Som et resultat forblir feltet til maskinen under hovedstolpene praktisk talt uendret. Annen vei - øke klarering mellom kantene på hovedstolpene og ankeret. For å opprettholde strømmen med en økning i gapet, er det nødvendig med en økning i MMF til eksitasjonsviklingen.
DC elektriske maskiner.
Generator med parallell eksitasjon.
Beregningsformler:
Strømmen gitt av generatoren til nettverket:
Eds. generator: E \u003d U + Iya ∙Rya.
Strøm levert til nettverket: P2 \u003d U ∙ I \u003d I 2 ∙ R
Drivmotoreffekt: P1 = P2/ η
Krafttap i armaturviklingen:
Rya \u003d I 2 i ∙ Rya
Krafttap i feltviklingen:
Рв = U ∙Iв = I 2 в∙ Rв
Totale tap: ΣP = P1 - ...
R2.
Generatoreffektivitet:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Motor med parallell magnetisering.
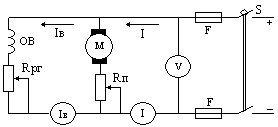
Beregningsformler:
Motorstrøm: I \u003d Ia + Iv
Motorspenning: U \u003d E + Ii ∙Rya.
Strømforbruk fra nettverket: Р1 = U∙I
Akselkraft: P 2 = P 1 ∙η
Moment på motorakselen:
M \u003d 9550 ∙ P 2 / n 2.
Motoreffektivitet:
η \u003d P 2 / P 1 \u003d (U∙I-ΣP) / U∙I
Eksempel 6.1. En DC-generator med parallell magnetisering utvikler en merkespenning Un = 220 V. Generatoren belastes med en last Rn = 2,2 Ohm. Armaturviklingsmotstand Rya = 0,2 Ohm, eksitasjonsvikling Rv = 220 Ohm. Generatoreffektivitet η = 0,87. Bestem følgende mengder:
1.belastningsstrøm; 2. ankerstrøm; 3. eksitasjonsstrøm; 4. generator emf;
5.net kraft; 6. strømforbruk; 7. totale tap i generatoren; 8. tap i armaturviklingen; 9. tap i eksitasjonsviklingen.
1. Lastestrøm:
2. Eksitasjonsstrøm:
![]()
3. Armaturstrøm: Iа \u003d I - Iv \u003d 100 - 1 \u003d 99 A.
4. Emf-generator:
E \u003d U + Ii ∙ Rya \u003d 220 + 99 0,1 \u003d 229,9 V.
5.Nettoeffekt:
Р2 = Un ∙ I = 220 ∙ 100 = 22000 W = 22 kW.
6. Strømforbruk:
7. Totale tap i generatoren:
ΣP \u003d P1 - P2 \u003d 25,87 - 22 \u003d 3,87 kW.
8.Tap i armaturviklingen:
Rya \u003d Iya 2 ∙Rya \u003d 99 2 ∙0.2 \u003d 1960.2 W.
9. Tap i eksitasjonsviklingen:
Pv = Un ∙ Iv = 220 ∙ 1 = 220 W.
Svar: I = 100A; Iv \u003d 1 A; la = 99 A; E = 229,9 V; P2 = 22 kW;
P1 = 25,87 kW; ΣР = 3,87 kW; Rya = 1960,2 W; Pv \u003d 220 W.
Eksempel 6.2. Fig. 8.2 En DC-motor med parallell eksitasjon opererer fra nettverket Un = 220 V. Ankerhastighet n2 = 1450 rpm. Motorstrøm I \u003d 500 A, armatur bak emf E \u003d 202 V, eksitasjonsviklingsmotstand Rv \u003d 44 Ohm. Motoreffektivitet
η = 0,88. Bestem: 1. eksitasjonsstrøm; 2. ankerstrøm; 3. armaturviklingsmotstand; 4.strømforbruk; 5.nyttig akselkraft; 6 Totaltap i motoren; 7. tap i armaturviklingen; 8. tap i armaturviklingen; 9.moment på akselen.
1. Eksitasjonsstrøm:
![]()
2. Armaturstrøm:
Ia \u003d I - Iv \u003d 500 -5 \u003d 495 A.
3. Armaturviklingsmotstand:
4. Strømforbruk fra nettverket:
P1 \u003d Un ∙ I \u003d 220 ∙ 500 \u003d 110 000 W \u003d 110 kW.
5. Netto akselkraft:
Р2 = P1 ∙ η = 110 ∙ 0,87 = 95,7 kW.
6. Totaltap i motoren:
ΣP \u003d P1 - P2 \u003d 110 - 95,7 \u003d 14,3 kW.





