De bestemmes hovedsakelig av måten eksitasjonsviklingen er slått på. Avhengig av dette skilles elektriske motorer ut:
1. med uavhengig stimulering: eksitasjonsviklingen drives av en ekstern kilde likestrøm(eksitator eller likeretter),
2. Med parallell eksitasjon : feltviklingen er koblet parallelt med armaturviklingen,
3. : feltviklingen er koblet i serie med armaturviklingen,
4. med blandet spenning: den har to eksitasjonsviklinger, en koblet parallelt med armaturviklingen og den andre i serie med den.
Alle disse elektriske motorene har samme enhet og skiller seg bare i implementeringen av eksitasjonsviklingen. Eksitasjonsviklingene til disse elektriske motorene utføres på samme måte som for.
elektrisk motor likestrøm med uavhengig stimulering
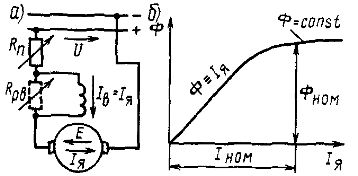
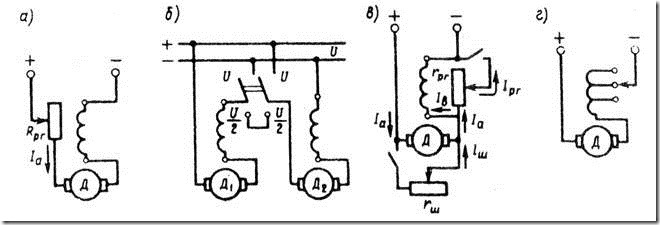
I denne elektriske motoren (fig. 1, a) er armaturviklingen koblet til hovedDC-kilden (DC-nettverk, generator eller likeretter) med spenning U, og eksitasjonsviklingen er koblet til en hjelpekilde med spenning UB. Kontrollreostaten Rrv er inkludert i magnetiseringsviklingskretsen, og startreostaten Rn er inkludert i ankerviklingskretsen.
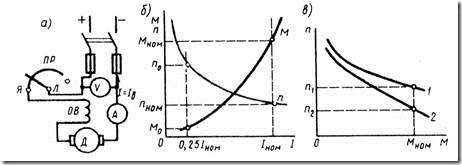
Justeringsreostaten brukes til å regulere rotasjonshastigheten til motorankeret, og startreostaten brukes til å begrense strømmen i ankerviklingen under oppstart. karakteristisk trekk elektrisk motor er at dens eksitasjonsstrøm Iv ikke er avhengig av strømmen Ii i armaturviklingen (laststrøm). Ved å neglisjere demagnetiseringseffekten av ankerreaksjonen, kan vi derfor omtrent anta at motorfluksen Ф ikke er avhengig av belastningen. Avhengighetene av det elektromagnetiske dreiemomentet M og rotasjonshastigheten n av strømmen Il vil være lineære (fig. 2, a). Følgelig vil den mekaniske karakteristikken til motoren også være lineær - avhengighet n (M) (fig. 2, b).
I fravær av en reostat med motstand Rn i ankerkretsen, vil hastigheten og de mekaniske egenskapene være stive, dvs. med en liten helningsvinkel til den horisontale aksen, siden spenningsfallet IаΣRя i maskinviklingene som inngår i ankerkretsen kl. nominell belastning er bare 3-5 % av Unom. Disse egenskapene (rette linjer 1 i fig. 2, a og b) kalles naturlige. Når en reostat med motstand Rn er inkludert i ankerkretsen, øker helningen til disse karakteristikkene, som et resultat av at det er mulig å oppnå en familie av reostatkarakteristikkene 2, 3 og 4, tilsvarende forskjellige betydninger Rn1, Rn2 og Rn3.
Ris. 1. Skjemaer av elektriske motorer likestrøm med uavhengig (a) og parallell (b) eksitasjon
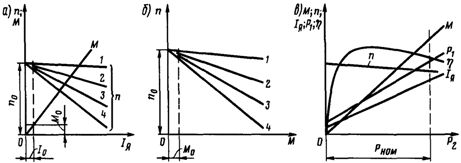
Ris. 2. Egenskaper til elektriske motorer likestrøm med uavhengig og parallell eksitasjon: a - høyhastighet og dreiemoment, b - mekanisk, c - arbeider mer motstand Rn, jo større helningsvinkel den reostatiske karakteristikken har, dvs. jo mykere er den.
Justeringsreostaten Rpv lar deg endre motorens eksitasjonsstrøm Ib og dens magnetiske fluks Ф. I dette tilfellet vil rotasjonshastigheten n også endres.
Ingen brytere og sikringer er installert i eksitasjonsviklingskretsen, siden når denne kretsen brytes, avtar den magnetiske fluksen til den elektriske motoren kraftig (bare fluksen fra gjenværende magnetisme forblir i den) og en nødmodus oppstår. Hvis den elektriske motoren går på tomgang eller med en liten belastning på akselen, øker hastigheten kraftig (motoren går løpsk). I dette tilfellet øker strømmen i armaturviklingen Ia sterkt og det kan oppstå en allroundbrann. For å unngå dette må beskyttelsen koble motoren fra strømkilden.
En kraftig økning i rotasjonshastigheten når kretsen til eksitasjonsviklingen brytes, forklares av det faktum at i dette tilfellet minker den magnetiske fluksen Ф kraftig (til verdien av Fost-fluksen fra gjenværende magnetisme) og f.eks. d.s. E og strømmen Iya øker. Og siden den påførte spenningen U forblir uendret, vil rotasjonshastigheten n øke til e. d.s. E vil ikke nå en verdi omtrent lik U (som er nødvendig for likevektstilstanden elektrisk krets ankre, hvor E= U - IаΣRя.
Når belastningen på akselen er nær den nominelle, vil den elektriske motoren stoppe ved brudd i magnetiseringskretsen, siden elektromagnetisk moment, som motoren kan utvikle med en betydelig reduksjon i den magnetiske fluksen, avtar og blir mindre enn belastningsmomentet på akselen. I dette tilfellet øker også strømmen Ia kraftig, og maskinen må kobles fra strømkilden.
Det skal bemerkes at rotasjonshastigheten n0 tilsvarer ideell tomgang når motoren ikke bruker elektrisk energi fra nettverket og dens elektromagnetiske dreiemoment er null. Under reelle forhold, i tomgangsmodus, bruker motoren tomgangsstrømmen I0 fra nettverket, noe som er nødvendig for å kompensere interne tap kraft, og utvikler et visst moment M0 som kreves for å overvinne friksjonskreftene i maskinen. Derfor er tomgangshastigheten i virkeligheten mindre enn n0.
Avhengigheten av rotasjonshastigheten n og det elektromagnetiske dreiemomentet M på kraften P2 (fig. 2, c) på motorakselen, som følger av de betraktede sammenhengene, er lineær. Avhengighetene til armaturviklingsstrømmen Iya og kraft P1 på P2 er også nesten lineære. Strømmen Ia og effekten P1 ved P2 = 0 er tomgangsstrømmen I0 og effekten P0 som forbrukes under tomgang. Effektivitetskurven har en felles karakter for alle elektriske maskiner.
elektrisk motor likestrøm med parallell eksitasjon
I denne elektriske motoren (se fig. 1, b) drives felt- og armaturviklingene fra samme elektriske energikilde med spenning U. Kontrollreostaten Rpv er inkludert i eksitasjonsviklingskretsen, og startreostaten Rp er inkludert i ankerviklingskretsen.
I den aktuelle elektriske motoren, separate måltider kretser av anker og eksitasjonsviklinger, som et resultat av at eksitasjonsstrømmen Iv ikke er avhengig av strømmen til ankerviklingen Iv. Derfor vil en parallell-eksitert motor ha de samme egenskapene som en uavhengig-eksitert motor. Imidlertid fungerer en parallelleksitert motor bare riktig når den drives av en DC-kilde med konstant spenning.
Når den elektriske motoren drives fra en kilde med variabel spenning (generator eller kontrollert likeretter), forårsaker en reduksjon i forsyningsspenningen U en tilsvarende reduksjon i eksitasjonsstrømmen Iv og magnetisk fluks F, noe som fører til en økning i ankerviklingen nåværende Ia. Dette begrenser muligheten til å kontrollere ankerhastigheten ved å endre forsyningsspenningen U. Derfor må elektriske motorer som er designet for å drives av en generator eller en kontrollert likeretter være uavhengig begeistret.
elektrisk motor likestrøm med sekvensiell eksitasjon
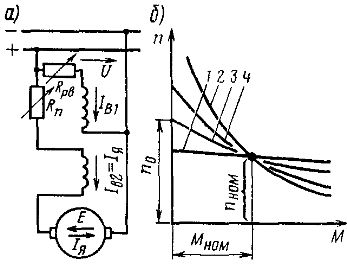
For å begrense strømmen ved oppstart inngår en startreostat Rp i armaturviklingskretsen (fig. 3, a), og for å styre hastigheten kan en justerende reostat Rrv kobles parallelt med eksitasjonsviklingen.
Ris. 3. Skjematisk diagram av den elektriske motoren likestrøm med seriell eksitasjon (a) og avhengigheten av dens magnetiske fluks Ф av strømmen Iа i armaturviklingen (b)
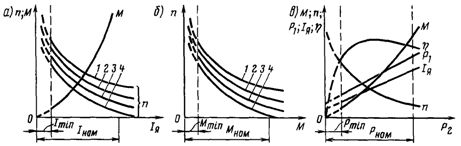
Ris. 4. Egenskaper til den elektriske motoren likestrøm med sekvensiell eksitasjon: a - høyhastighet og dreiemoment, b - mekanisk, c - arbeidere.
Et karakteristisk trekk ved denne elektriske motoren er at dens eksitasjonsstrøm Iv er lik eller proporsjonal (når reostaten Rpv er slått på) med ankerviklingsstrømmen Ia, derfor avhenger den magnetiske fluksen Ф av motorbelastningen (fig. 3, b) ).
Med armaturviklingsstrøm I, mindre (0,8-0,9) merkestrøm Inom det magnetiske systemet til maskinen er ikke mettet, og vi kan anta at den magnetiske fluksen Ф endres i direkte proporsjon med strømmen Iа. Derfor vil hastighetskarakteristikken til den elektriske motoren være myk - med en økning i strømmen vil Ith-rotasjonsfrekvensen n reduseres kraftig (fig. 4, a). Nedgangen i rotasjonshastigheten n oppstår på grunn av økningen i spenningsfallet IяΣRя. i indre motstand Rya. ankerviklingskretser, så vel som på grunn av en økning i den magnetiske fluksen F.
Det elektromagnetiske momentet M med en økning i strømmen Ia vil øke kraftig, siden i dette tilfellet øker også den magnetiske fluksen F, dvs. momentet M vil være proporsjonalt med strømmen Ia. Derfor, ved en strøm Ia mindre enn (0,8 N-0,9) Inom, har hastighetskarakteristikken form av en hyperbel, og momentkarakteristikken har form av en parabel.
Ved strømmer Il > Inom er avhengighetene til M og n av Il lineære, siden i denne modusen vil den magnetiske kretsen bli mettet og den magnetiske fluksen Ф vil ikke endre seg når strømmen Il endres.
Den mekaniske karakteristikken, dvs. avhengigheten av n til M (fig. 4, b), kan bygges på grunnlag av avhengighetene til n og M av Ib. I tillegg til den naturlige karakteristikken 1, er det mulig å oppnå en familie av reostatkarakteristikk 2, 3 og 4 ved å inkludere en reostat med motstand Rp i ankerviklingskretsen. Disse karakteristikkene tilsvarer forskjellige verdier av Rn1, Rn2 og Rn3, mens jo større Rn, desto lavere er karakteristikken.
Den mekaniske egenskapen til den betraktede motoren er myk og har en hyperbolsk karakter. Ved lav belastning avtar den magnetiske fluksen Ф kraftig, rotasjonshastigheten n øker kraftig og kan overstige den maksimalt tillatte verdien (motoren går tom for gir). Derfor kan slike motorer ikke brukes til å drive mekanismer som opererer i tomgangsmodus og ved lav belastning (ulike maskinverktøy, transportører, etc.).
Vanligvis minimal tillatt belastning for motorer med stor og middels effekt er (0,2 .... 0,25) Inom. For å forhindre at motoren går uten belastning, er den stivt koblet til drivmekanismen (gir eller blindclutch), bruk av reimdrift eller friksjonskobling er uakseptabelt.
Til tross for denne ulempen er seriebegeistrede motorer mye brukt, spesielt der det er store endringer i lastmomentet og vanskelige startforhold: i alle trekkraftverk (elektriske lokomotiver, diesellokomotiver, elektriske tog, elektriske biler, elektriske gaffeltrucker, etc.). så vel som i drivverk av lastløftemekanismer (kraner, heiser, etc.).
Dette forklares med det faktum at med en myk karakteristikk, fører en økning i lastmomentet til en mindre økning i strøm- og strømforbruk enn for motorer med uavhengig og parallell eksitasjon, derfor tåler motorer med seriemagnetisering overbelastninger bedre. I tillegg har disse motorene et stort startmoment enn motorer med parallell og uavhengig eksitasjon, siden med en økning i ankerviklingsstrømmen ved oppstart øker også den magnetiske fluksen tilsvarende.
Hvis vi for eksempel aksepterer at den kortsiktige startstrømmen kan være 2 ganger nominell driftsstrøm til maskinen, og neglisjerer effekten av metning, ankerreaksjonen og spenningsfallet i kretsen til dens vikling, så i en motor med serieeksitasjon vil startmomentet være 4 ganger større enn det nominelle (i Både strøm og magnetisk fluks øker 2 ganger), og i motorer med uavhengig og parallell eksitasjon - bare 2 ganger mer.
I virkeligheten, på grunn av metningen av den magnetiske kretsen, øker ikke den magnetiske fluksen proporsjonalt med strømmen, men fortsatt vil startmomentet til en motor med serieeksitasjon, alt annet likt, være betydelig større enn startmomentet av samme motor med uavhengig eller parallell eksitasjon.
Avhengighetene til n og M på kraften P2 på motorakselen (fig. 4, c), som følger av bestemmelsene ovenfor, er ikke-lineære, avhengighetene til P1, Ip og η på P2 har samme form som for motorer med parallell magnetisering.
elektrisk motor likestrøm med blandet spenning
I denne elektriske motoren (fig. 5, a) skapes den magnetiske fluksen Ф som et resultat av felles handling av to eksitasjonsviklinger - parallelle (eller uavhengige) og serier, gjennom hvilke eksitasjonsstrømmene Iv1 og Iv2 \u003d Ib
Derfor
![]()
der Фposl er den magnetiske fluksen til serieviklingen, avhengig av strømmen Il, Фpar er den magnetiske fluksen til parallellviklingen, som ikke er avhengig av belastningen (bestemt av eksitasjonsstrømmen Iв1).
Den mekaniske egenskapen til en elektrisk motor med blandet eksitasjon (fig. 5, b) er plassert mellom egenskapene til motorer med parallell (rett linje 1) og serie (kurve 2) eksitasjon. Avhengig av forholdet mellom de magnetomotoriske kreftene til parallell- og serieviklingene i nominell modus, er det mulig å tilnærme egenskapene til en motor med blandet eksitasjon til karakteristikk 1 (kurve 3 med lav ppm av serieviklingen) eller til karakteristikk 2 (kurve 4 for en liten ppm) med parallell vikling).
Ris. 5. Skjematisk diagram av en elektrisk motor med blandet eksitasjon (a) og dens mekaniske egenskaper (b)
Fordelen med motoren likestrøm med blandet eksitasjon er at den, med en myk mekanisk karakteristikk, kan fungere på tomgang når Fposl = 0. I denne modusen bestemmes rotasjonsfrekvensen til ankeret av den magnetiske fluksen Фpar og har en begrenset verdi (motoren går ikke løs).
[dokument]1.doc
Lekse #2(modul 5)
"Likestrømsmotor med serieeksitasjon. Tilordning av elementer. Driftsprinsipp"
gr.TP-07
Asmolkova O.A.
I semester 2009
DC-motor med seriemagnetisering. Tilordning av elementer. Prinsipp for operasjon
1. Enhet og formål med elementene til DC-motoren
.
DC motor - elektrisk maskin , DC maskin, transformerer elektrisk energi DC inn mekanisk energi. Den består, som alle DC-maskiner, av en fast stator med stolper og en roterende rotor (armatur) med en kollektor.
stator DC-maskin består av en sylindrisk ramme (kasse), stolper med eksitasjonsvikling og endeskjold ( ris. 2.1.). På sengen er hovedpolene (hoved)polene styrket for å stimulere den magnetiske hovedfluxen og ytterligere for å forbedre svitsjingen i motoren. Hovedstangen består av en stangkjerne laget av stålplate og boltet til rammen, og en magnetiseringsspole. Kjernen i den frie enden er utstyrt med et polstykke for å skape den nødvendige fordelingen av magnetisk induksjon langs omkretsen av ankeret. seng 3 er åket til maskinen, det vil si den delen som lukker den magnetiske kretsen til hovedfluksen Ф. Den er laget av støpt stål, siden den magnetiske fluksen i den er relativt konstant. Ytterligere stolper er installert på rammen mellom de viktigste. Deres vikling er koblet i serie med armaturviklingen. Formålet med disse polene er å skape et ekstra magnetfelt. Dette er nødvendig for at børstene på samleren ikke skal gnistre.
Anker (rotor) kalles den delen av maskinen, i hvis vikling, når den roterer i forhold til hoved magnetfelt EMF induseres. Anker 5 DC-motor består av en stålaksel, en ståltannkjerne, en vikling lagt i sporene, og en kollektor montert på ankerakselen ( ris. 2.1.). Feltviklinger er nødvendige for å sikre optimal interaksjon mellom de magnetiske feltene til rotoren og statoren (dvs. maksimalt dreiemoment på rotoren). karakteristisk del av motoren (eller hvilken som helst elektrisk maskin) DC er samleren. Dette er en hul sylinder satt sammen av kileformede kobberplater isolert fra hverandre. Manifoldplatene er også isolert fra motorakselen. De er forbundet med ledere til viklingstrådene plassert i sporene til ankeret. Den roterende viklingen er koblet til den eksterne kretsen med en glidende kontakt mellom børstene og kommutatoren. Kollektoren i DC-maskiner tjener til å rette opp den variable EMF indusert i den roterende armaturviklingen, og for å oppnå et konstant elektromagnetisk moment i retningen.
Ris. 2. 1. DC-motorenhet:
1 - eksitasjonsvikling;2 - poler;3 - seng;4 - stangspiss;5 - anker;6 - ankerviklingsledere;
7 - tannet ankerkjerne;8 - maskinluftspalte
2. Arbeidsprinsipp for DC-motor
2.1 Generell informasjon
Når ankerviklingen roterer i et fast magnetfelt, induseres en variabel EMF i den, som endres med frekvensen:
Hvor n- anker rotasjonshastighet.
Når ankeret roterer, virker en variabel EMF mellom to punkter på ankerviklingen. Men mellom de faste kontaktbørstene virker en EMF-konstant i størrelse og retning E, lik summen av de øyeblikkelige verdiene til EMF indusert i alle seriekoblede svinger av ankeret mellom disse børstene.
EMF-avhengighet E fra den magnetiske fluksen til maskinen og rotasjonshastigheten til ankeret har formen:
Når du kobler ankerviklingen til et nettverk med spenning U, EMF E vil være omtrent lik spenningen U, og rotorhastighet:
Derfor, på grunn av tilstedeværelsen av en kollektor, når en DC-maskin opererer i en motormodus, er rotorhastigheten ikke strengt relatert til nettfrekvensen, men kan variere over et bredt område ved å endre spenningen U og magnetisk fluks F. Symmetriaksen som skiller polene til en DC-maskin kalles dens geometriske nøytrale.
Med en åpen ekstern krets vil strømmen i armaturviklingen ikke flyte, siden EMF indusert i to deler av armaturviklingen plassert på begge sider av den geometriske nøytralen er rettet motsatt og gjensidig kompenserer. For å levere maksimal spenning fra ankerviklingen til den eksterne kretsen, må denne kretsen kobles til to punkter på ankerviklingen, mellom hvilke den største potensialforskjellen virker, hvor børstene skal installeres. Når ankeret roterer, beveger punktene seg fra den geometriske nøytralen, men flere og flere nye viklingspunkter vil nærme seg børstene, mellom hvilke EMF virker E, så EMF i den eksterne kretsen vil være uendret i størrelse og retning. For å redusere EMF-bølgene under overgangen av børstene fra en samleplate til en annen, er det vanligvis inkludert minst 16 aktive ledere i hver parallelle gren av ankerviklingen.
På ankeret, gjennom viklingen som strøm flyter Jeg, det elektromagnetiske øyeblikket virker:
Når maskinen kjører i motormodus, roterer det elektromagnetiske dreiemomentet.
2.2 DC motor ankerreaksjon
Ved tomgang skapes den magnetiske fluksen i motoren kun av HC ^F i eksitasjonsviklingene. I dette tilfellet, den magnetiske fluksen F i med en konstant luftspalte mellom ankeret og kjernen til hovedstolpen (som er typisk for mange DC-maskiner), er den fordelt symmetrisk i forhold til maskinens lengdeakse.
Når maskinen opererer under belastning, går en strøm gjennom ankerviklingen, og ankerets NS skaper sitt eget magnetfelt. Effekten av ankerfeltet på magnetfeltet til maskinen kalles ankerreaksjon. magnetisk fluks F En q laget av et anker F En q i en to-polet maskin, når du installerer børster på nøytral, er den rettet langs tverrgående akse maskiner, så magnetfeltet til ankeret kalles tverrgående. Som et resultat av flyten F En q den symmetriske fordelingen av magnetfeltet til maskinen er forvrengt, og den resulterende fluksen F skjære er konsentrert hovedsakelig ved kantene av hovedstolpene. I dette tilfellet, den fysiske nøytrale b-b(linjen som forbinder punktene i ankersirkelen der induksjonen er null) er forskjøvet i forhold til den geometriske nøytral a-a til en eller annen vinkel β (fig.2.2). I motorer er den fysiske nøytralen forskjøvet mot rotasjonsretningen.
Basert på loven full strøm NS-anker, som virker i luftgapet i en avstand x fra aksen til hovedpolene, bestemmes av uttrykket:
Derfor ankrer NS F En q varierer lineært langs omkretsen; under midten av hovedpolen er den lik null, og på punktene der børstene er installert, har den en maksimal verdi. Magnetisk induksjon i luft
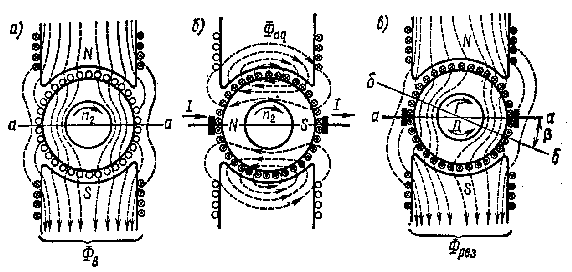
^ Fig2.2 - Magnetfeltet til en likestrømsmotor: a) fra eksitasjonsviklingen; b) fra ankerviklingen; c) resulterende (F i - magnetisk fluks ved x.x.; F En q - magnetisk fluks skapt av NS-armaturen; F skjære - resulterende strøm; a-a - geometrisk nøytral; b-b - fysisk nøytral; β – nøytral forskyvningsvinkel b-b)
Klarering med umettet magnetisk system:
Hvor er verdien av luftgapet ved punkt x.
2,3 DC motormoment
Hvis feltviklingen og ankeret til motoren er koblet til et DC-nettverk med en spenning ^u da er det et elektromagnetisk dreiemoment M Em. Nyttig dreiemoment M på motorakselen er mindre enn elektromagnetisk med verdien av det motvirkende momentet skapt i maskinen av friksjonskrefter og lik momentet M X i x.x.-modus, dvs. M = M Em -M X .
Startmoment motoren må være større enn den statiske bremsen M t i rotorens hviletilstand, ellers vil ikke motorens anker begynne å rotere. I steady state (ved n = const) det er en likevekt mellom de roterende M og bremsende M t-momentene:
M = M Em – M X = M t
Det er kjent fra mekanikken at mekanisk kraft motor kan uttrykkes i form av dreiemoment og vinkelhastighet
Derfor er det nyttige dreiemomentet til motoren ^M(N m) uttrykt i nettoeffekt R(kW) og hastighet n(rpm),
M=9550P/n
La oss diskutere noen viktige spørsmål om start og drift av DC-motorer. Fra ligningen for motorens elektriske tilstand følger det at
Jeg Jeg = (U - E)/R Jeg
I driftsmodus er ankerstrømmen I I begrenset f.eks. d.s. E, hvis n er omtrent lik n ingen m. Ved lanseringstidspunktet er n = 0, f.eks. d.s. E = 0 og startstrøm Jeg P = U/ R Jeg 10-30 ganger mer enn nominelt. Derfor er den direkte starten av motoren, dvs. den direkte tilkoblingen av ankeret til nettspenningen, uakseptabel. For å begrense den høye startstrømmen til ankeret kobles en startreostat i serie med ankeret før start. R P med liten motstand. I dette tilfellet, når E = O
Jeg P =U/(R Jeg - R P ) << U/R Jeg
Reostatmotstand RP velges i henhold til tillatt ankerstrøm.
Når motoren akselererer til nominell hastighet e. d.s. Eøker, og strømmen avtar og startreostaten fjernes gradvis og fullstendig (startreostater beregnes for kortvarig innkobling). Justering av reostat R reg i en eksitasjonskrets med relativt høy motstand (ti-talls og hundrevis av ohm), før motoren startes, fjernes den fullstendig slik at eksitasjonsstrømmen og statorens magnetiske fluks ved oppstart. F var nominelle. Dette fører til økt startmoment, som sikrer rask og enkel akselerasjon av motoren.
Etter oppstart og akselerasjon oppstår en stabil drift av motoren, der bremsemomentet på akselen ^ Mt vil bli balansert av øyeblikket utviklet av motoren M Em , dvs. M Em == M t ( på n = const. )
DC-motorer kan gjenopprette den stabile driftstilstanden forstyrret av en endring i bremsemomentet, det vil si at de kan utvikle dreiemoment M, lik den nye verdien av bremsemomentet M t med en tilsvarende ny hastighet n".
Faktisk, hvis bremsemomentet til lasten M t er større enn motorens dreiemoment M Em, da reduseres ankerhastigheten. Ved konstant spenning U og flyt F dette vil føre til en nedgang. d.s. E anker, øker ankerstrømmen og dreiemomentet til likevekt er nådd, hvorved M Em = M t og n" < n. Når bremsemomentet reduseres til M t, settes steady-state-driftsmodusen på samme måte inn kl. M Em = M t" og n"> n" . Dermed har likestrømsmotorer egenskapen til selvregulering - kan utvikle et dreiemoment lik bremsemomentet.
2.4 Frekvenskontroll
Ankerhastigheten til en DC-motor bestemmes basert på den elektriske tilstandsligningen U= ER Jeg Jeg Jeg etter å ha erstattet e i den. d.s. E = sfn:

Armatur spenningsfall R Jeg Jeg Jeg liten: ved nominell belastning overskrider den ikke 0,03 - 0,07 U ingen m .
Dermed er hastigheten til en DC-motor direkte proporsjonal med den påførte nettspenningen og omvendt proporsjonal med statormagnetiske fluks . Det er to måter å regulere motorhastigheten på: ved å endre statorfluksen F eller spenningen U som leveres til motoren. Hastighetskontrollen ved å endre magnetfeltet til maskinen utføres ved hjelp av en justerende reostat i motorens eksitasjonskrets. Spenningen som tilføres motoren endres ved å justere kildespenningen.
Du kan legge til en ekstra reostat til armaturkretsen. I dette tilfellet erstattes startreostaten med en ballast R etc En slik reostat utfører funksjonene til både en startreostat og en justerende reostat. I dette tilfellet har ankerrotasjonsfrekvensligningen for en DC-motor formen
Av dette følger det at reguleringen av motorhastigheten kan utføres ved å endre nettspenningen, motstanden til ballastreostaten eller statorfluksen.
Motorreversering. Fra motorens dreiemomentligning M Em = kFJeg Jeg det følger at reversering, dvs. endring av rotasjonsretningen til ankeret, kan utføres ved å endre retningen til strømmen i eksitasjonsviklingen (strømning) F) eller armaturstrøm.
For å reversere motoren "på farten", endres retningen til ankerstrømmen (ved å bytte ankerledningene), og eksitasjonsviklingen blir ikke slått, siden den har en stor induktans og det er uakseptabelt å bryte kretsen med strøm. Reversering av den frakoblede motoren utføres også ved å endre retningen på strømmen i feltviklingen (bytte utgangene).
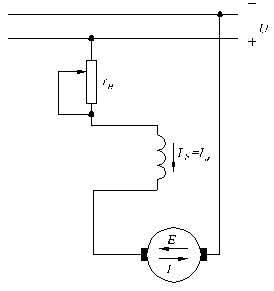
3. Motor med serieeksitasjon
I en motor med serieeksitasjon ( fig.2.3a) eksitasjonsstrømmen er lik ankerstrømmen: Jeg i =jeg en, så den magnetiske fluksen Ф er en funksjon av laststrømmen Jeg en. Arten av denne funksjonen varierer avhengig av størrelsen på lasten. På Jeg en <(0,8...0,9) I ingen m når det magnetiske systemet er umettet, f=k f Jeg en, og proporsjonalitetskoeffisienten Til f i et betydelig spekter av belastninger forblir nesten konstant. Med ytterligere økning i belastning, flyten F vokser saktere enn Jeg en >jeg ingen m) vi kan anta det F=konst. I samsvar med dette endres også avhengigheter. n=f(I en ), M=f(I en) (ris. 2.3.b).
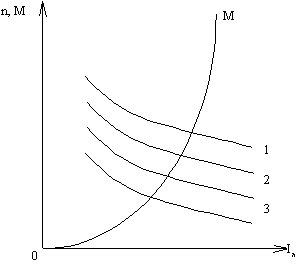
Ris. 2.3. - a) skjema for motoren med sekvensiell eksitasjon; b) avhengigheten av dreiemomentet og rotasjonshastigheten av ankerstrømmen (I Jeg – ankerstrøm; Jeg i - eksitasjonsstrøm;r n
- belastningsmotstand;
n- roterende hastighet; en - naturlig karakteristikk; 2,3 - reostatiske egenskaper som tilsvarer forskjellige verdier av ytterligere motstand r n ).
I tillegg til naturlige egenskaper 1, er det mulig å oppnå en familie av reostatiske egenskaper 2, 3 og 4 ved å inkludere ytterligere motstander r n i ankerkretsen Jo større verdien av r n, jo lavere er karakteristikken.
Ved lav belastning øker hastigheten n kraftig og kan overstige den maksimalt tillatte verdien (motoren går inn i "mellomrom"). Derfor kan slike motorer ikke brukes til å drive mekanismer som opererer i tomgangsmodus og ved lav belastning.
Med en stiv karakteristikk er rotasjonshastigheten n nesten ikke avhengig av øyeblikket M, derfor kraften:
![]() , hvor FRA 4
- konstant.
, hvor FRA 4
- konstant.
Med en myk karakteristikk av motoren er n omvendt proporsjonal, som et resultat av dette:
![]() , hvor er en konstant.
, hvor er en konstant.
Derfor, når belastningsmomentet endres over et bredt område, vil kraften R 2 , og derav kraften R 1 og nåværende Jeg en endre for motorer med serieeksitasjon i mindre grad enn for en motor med parallell magnetisering, i tillegg tåler de overbelastninger bedre.
I denne motoren er feltviklingen koblet i serie til ankerkretsen (fig. 29.9, en), derfor magnetisk fluksF det avhenger av belastningsstrømmen Jeg = jeg a = jeg inn . Ved lav belastning er det magnetiske systemet til maskinen ikke mettet og avhengigheten av den magnetiske fluksen på laststrømmen er direkte proporsjonal, dvs. F = k f I en (k f- proporsjonalitetskoeffisient). I dette tilfellet finner vi det elektromagnetiske øyeblikket:
Rotasjonsfrekvensformelen vil ha formen
 . (29.15)
. (29.15)
På fig. 29,9, b resultatdata presentert M = F(I) og n= (I) serie eksitasjonsmotor. Ved høye belastninger oppstår metning av det magnetiske systemet til motoren. I dette tilfellet endres den magnetiske fluksen praktisk talt ikke med økende belastning, og egenskapene til motoren blir nesten rettlinjede. Seriens magnetiseriviser at motorhastigheten endres betydelig med lastendringer. Denne egenskapen kalles myk.
Ris. 29.9. Sekvensiell eksitasjonsmotor:
en- kretsskjema; b- ytelsesegenskaper; c - mekaniske egenskaper; 1 - naturlig karakteristikk; 2 - kunstig karakteristikk
Med en reduksjon i belastningen til den sekvensielle eksitasjonsmotoren øker rotasjonshastigheten kraftig, og ved en belastning på mindre enn 25% av den nominelle verdien kan den nå verdier som er farlige for motoren ("overshoot" ”). Derfor er driften av en serieeksitasjonsmotor eller dens oppstart med en akselbelastning på mindre enn 25% av den nominelle uakseptabel.
For mer pålitelig drift må akselen til den sekvensielle eksitasjonsmotoren være stivt forbundet med arbeidsmekanismen ved hjelp av en kobling og et gir. Bruk av remdrift er uakseptabelt, siden hvis beltet er ødelagt eller tilbakestilt, kan motoren "gå tom". Gitt muligheten for å drive motoren ved økte hastigheter, testes serieeksitasjonsmotorer, i henhold til GOST, i 2 minutter for å overskride hastigheten med 20 % over maksimumsverdien som er angitt på fabrikkskjoldet, men ikke mindre enn 50 % over det nominelle.
Mekaniske egenskaper serie eksitasjonsmotor n=f(M) er presentert i fig. 29,9, i. Kraftig fallende kurver av mekaniske egenskaper ( naturlig 1 og kunstig 2 ) gir den sekvensielle eksitasjonsmotoren stabil drift under enhver mekanisk belastning. Egenskapen til disse motorene til å utvikle et stort dreiemoment proporsjonalt med kvadratet på belastningsstrømmen er viktig, spesielt under vanskelige startforhold og under overbelastning, siden med en gradvis økning i belastningen til motoren, øker effekten ved inngangen langsommere enn dreiemomentet. Denne funksjonen til serieeksitasjonsmotorer er en av grunnene til deres bred applikasjon som trekkmotorer i transport, samt kranmotorer i løfteinstallasjoner, det vil si i alle tilfeller av elektrisk drift med vanskelige startforhold og en kombinasjon av betydelige belastninger på motorakselen med lav hastighet.
Nominell hastighetsendring av seriemagnetiseringsmotor
 , (29.16)
, (29.16)
hvor n - rotasjonshastighet ved en motorbelastning på 25 % av den nominelle.
Rotasjonshastigheten til serieeksitasjonsmotorer kan kontrolleres ved å endre enten spenning U, eller den magnetiske fluksen til eksitasjonsviklingen. I det første tilfellet en justering reostat R rg (Fig. 29.10, en). Med en økning i motstanden til denne reostaten, reduseres spenningen ved inngangen til motoren og rotasjonsfrekvensen. Denne kontrollmetoden brukes hovedsakelig i småmotorer. Ved en betydelig motoreffekt er denne metoden uøkonomisk på grunn av store energitap i R rg . I tillegg, reostat R rg , beregnet på driftsstrømmen til motoren, viser det seg å være tungvint og dyrt.
Når flere motorer av samme type arbeider sammen, reguleres rotasjonshastigheten ved å endre skjemaet for deres inkludering i forhold til hverandre (fig. 29.10, b). Så når motorene er koblet parallelt, er hver av dem under full nettspenning, og når to motorer er koblet i serie, står hver motor for halvparten av nettspenningen. Med samtidig drift av et større antall motorer er et større antall byttealternativer mulig. Denne metoden for hastighetskontroll brukes i elektriske lokomotiver, hvor flere identiske trekkmotorer er installert.
Det er mulig å endre spenningen som tilføres motoren når motoren drives fra en likestrømskilde med regulert spenning (for eksempel i henhold til en krets som ligner på fig. 29.6, en). Med en reduksjon i spenningen som tilføres motoren, skifter dens mekaniske egenskaper ned, praktisk talt uten å endre krumningen deres (fig. 29.11).
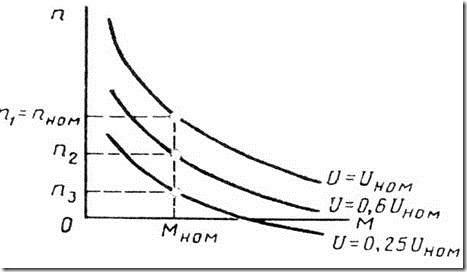
Ris. 29.11. Mekaniske egenskaper til en serieeksitasjonsmotor med endring i inngangsspenningen
Det er tre måter å regulere motorhastigheten på ved å endre den magnetiske fluksen: ved å shunte eksitasjonsviklingen med en reostat r rg , seksjonering av eksitasjonsviklingen og shunting av ankerviklingen med en reostat r w . Slår på reostaten r rg , shunting av eksitasjonsviklingen (fig. 29.10, i), så vel som en reduksjon i motstanden til denne reostaten fører til en reduksjon i eksitasjonsstrømmen Jeg i \u003d I a - I rg og følgelig til en økning i rotasjonshastigheten. Denne metoden er mer økonomisk enn den forrige (se fig. 29.10, en), brukes oftere og estimeres ved reguleringskoeffisienten
 .
.
Vanligvis motstanden til reostaten r rg tatt slik at krg >= 50 % .
Ved seksjonering av feltviklingen (fig. 29.10, G) å slå av en del av svingene til viklingen er ledsaget av en økning i rotasjonshastigheten. Ved shunting av armaturviklingen med en reostat r w (se fig. 29.10, i) eksitasjonsstrømmen øker I i \u003d I a + I rg , som forårsaker en reduksjon i rotasjonshastigheten. Denne reguleringsmetoden, selv om den gir dypregulering, er uøkonomisk og brukes svært sjelden.
Ris. 29.10. Regulering av rotasjonshastigheten til serieeksitasjonsmotorer





