elektromagnetisk moment a synkron motor skapes av samspillet mellom strømmen i rotorviklingen og et roterende magnetfelt.
Elektromagnetisk moment M proporsjonal med elektromagnetisk effekt:
 (3.40)
(3.40)
Vinkelsynkron rotasjonshastighet.
Ved å erstatte (3.39) verdien av elektromagnetisk kraft (3.33), får vi:
 , (3.41)
, (3.41)
dvs. det elektromagnetiske momentet til en induksjonsmotor er proporsjonal med kraften til elektriske tap i rotorviklingen.
Hvis verdien av rotorstrømmen i henhold til uttrykk (3.28) erstattes med (3.41), får vi formelen elektromagnetisk øyeblikk asynkron maskin (Nm):
 (3.42)
(3.42)
Parametre for ekvivalent krets til asynkron maskin r 1 , r¢ 2 , x 1 Og x¢ 2, inkludert i uttrykket (3.42), er konstante, siden verdiene deres forblir praktisk talt uendret med endringer i maskinens belastning. Spenningen på statorfaseviklingen kan også betraktes som konstant. U 1 og frekvens f1. Når det gjelder øyeblikk M den eneste variabelen er slip s, som for ulike driftsmoduser for en asynkron maskin kan anta forskjellige verdier i området fra + ¥ til -¥ (se fig. 3.5).
Vurder avhengigheten av dreiemoment på slip M = f(s) på U 1= konst, f1= const og konstant parametere for den ekvivalente kretsen. Denne avhengigheten kalles mekaniske egenskaper asynkron maskin. Analyse av uttrykk (3.42), som er et analytisk uttrykk for en mekanisk egenskap M = f(s), viser det for slip-verdier s= 0 og s= ¥ elektromagnetisk moment M= 0. Av dette følger at den mekaniske karakteristikk M = f(s) har et maksimum.
For å bestemme den kritiske slip s cr, tilsvarende det maksimale momentet, er det nødvendig å ta den første deriverte av (3.42) og likestille den til null: . Som et resultat
 (3.43)
(3.43)
Ved å erstatte verdien av den kritiske slip (i henhold til 3.43) i uttrykket for det elektromagnetiske momentet (3.42), etter en rekke transformasjoner, får vi uttrykket for det maksimale momentet (N m):
 (3.44)
(3.44)
I (3.43) og (3.44) tilsvarer plusstegnet motormodusen, og minustegnet til generatordriftsmodusen til den asynkrone maskinen.
For asynkrone maskiner generelt formål aktiv motstand til statorviklingen r1 mye mindre enn summen av induktive reaktanser: r1< < (x 1 + x¢ 2). Derfor neglisjerer verdien r1, får vi forenklede uttrykk for den kritiske slip
 , (3.45)
, (3.45)
og maksimalt dreiemoment (N m)
 (3.46)
(3.46)
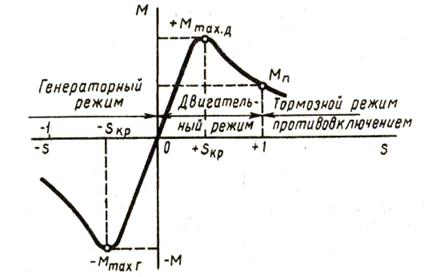
Ris. 3.10. Avhengighet av driftsmodusene til en asynkron maskin på slip
Analyse av uttrykk (3.44) viser det maksimalt øyeblikk det er flere asynkrone maskiner i generatormodus enn i motormodus ( M maks Г > М maksD). På fig. 3.4 viser den mekaniske egenskapen til en asynkron maskin M = f(s) på U 1= konst. Denne karakteristikken indikerer sonene som tilsvarer forskjellige driftsmoduser: motormodus (0< s < 1), когда электромагнитный момент M roterer; generator modus ( - ¥ < s < 0) и тормозной режим противовключением (1 < s < + ¥), когда электромагнитный момент M er hemmende.
Fra (3.42) følger det at det elektromagnetiske dreiemomentet til en induksjonsmotor er proporsjonal med kvadratet på nettspenningen: M ≡ U 1 2. Dette påvirker ytelsen til motoren sterkt: selv en liten reduksjon i nettspenningen forårsaker en merkbar reduksjon i dreiemomentet til asynkronmotoren. For eksempel når nettspenningen reduseres med 10 % i forhold til den nominelle ( U 1 = 0.9U nom) det elektromagnetiske dreiemomentet til motoren reduseres med 19 %: М¢ = 0.9 2 M = 0.81M, Hvor M— øyeblikk ved merkespenningen til nettverket, og M¢ - dreiemoment ved redusert spenning.
For å analysere driften av en asynkron motor, er det mer praktisk å bruke den mekaniske egenskapen M = f(s), vist i fig. 3.5.
 |
Ris. 3.11. Avhengighet av det elektromagnetiske dreiemomentet til en induksjonsmotor på slip
Når motoren er koblet til nettverket, begynner statormagnetfeltet, uten treghet, umiddelbart å rotere med en synkron frekvens n 1 Samtidig forblir rotoren til motoren under påvirkning av treghetskrefter i det første startøyeblikket ubevegelig ( n 2= 0) og glidende s = 1.
Bytter inn i (3.42) slip s= 1, får vi uttrykket for startmomentet til en asynkronmotor (N m):
 (3.47)
(3.47)
Under påvirkning av dette øyeblikket begynner rotasjonen av motorrotoren, mens slippet avtar, og dreiemomentet øker i samsvar med karakteristikken M = f(s). Ved kritisk utglidning s crøyeblikket når sin maksimale verdi M ma x.
Med en ytterligere økning i rotasjonshastigheten (reduksjon av slip), momentet M begynner å avta til den når en stabil verdi lik summen av de motvirkende momentene som påføres motorrotoren: moment XX M0 og nyttig lastmoment (moment på motorakselen) M 2, det er
M \u003d M 0 + M 2 \u003d M st. (3.48)
Det bør huskes at med glidninger nær enhet (motorens startmodus), endrer parametrene til den ekvivalente kretsen til en asynkronmotor verdiene merkbart. Dette forklares hovedsakelig av to faktorer: økt magnetisk metning av de tannede lagene til statoren og rotoren, noe som fører til en reduksjon i den induktive lekkasjemotstanden x 1 Og x 2, og effekten av strømforskyvning i rotorstengene, noe som fører til en økning i den aktive motstanden til rotorviklingen r 2 ¢. Derfor kan ikke parametrene til den ekvivalente kretsen til en asynkronmotor brukt i beregningen av det elektromagnetiske dreiemomentet i henhold til (3.42), (3.44) og (3.46) brukes til å beregne startmomentet i henhold til (3.47).
Statisk moment M st er lik summen av motvirkende momenter med jevn rotasjon av rotoren ( n 2= konst). La oss anta at det motvirkende momentet på motorakselen M 2 tilsvarer motorens nominelle belastning. I dette tilfellet bestemmes den stabile tilstanden til motordriften av et punkt på den mekaniske karakteristikken med koordinater M = M nom Og s = s nom, Hvor M nom Og s nom— nominelle verdier for elektromagnetisk dreiemoment og slip.
Fra analysen av den mekaniske egenskapen følger det også, at stabil drift av en induksjonsmotor er mulig med slip mindre enn det kritiske (s< s кр ), dvs. i OA-delen av den mekaniske karakteristikken. Faktum er at det er i dette området at en endring i belastningen på motorakselen er ledsaget av en tilsvarende endring i det elektromagnetiske dreiemomentet.
Så hvis motoren gikk i nominell modus ( M nom; s nom), så er øyeblikkene like: M nom \u003d M 0 + M 2. Hvis det er en økning i lastmomentet M 2 opp til verdi M¢ 2, da vil likestillingen av momentene bli krenket, dvs. M nom< М 0 + М 2 , og rotorhastigheten vil begynne å synke (slipp vil øke). Dette vil føre til en økning i det elektromagnetiske dreiemomentet til en verdi M¢ \u003d M 0 + M¢ 2, (punkt B), hvoretter motordriftsmodusen igjen vil bli stabil.
Hvis, under drift av motoren i nominell modus, synker lastmomentet til verdien ¢¢ 2, da vil likestillingen av øyeblikkene bli brutt igjen, men nå vil dreiemomentet være større enn summen av de motsatte: M nom > M 0 + M¢¢ 2. Rotorhastigheten vil begynne å øke (glidningen vil avta), og dette vil føre til en reduksjon i det elektromagnetiske dreiemomentet M opp til verdi M¢¢ \u003d M 0 + M¢¢ 2(punkt C); stabil driftsmodus vil bli gjenopprettet igjen, men med andre verdier M Og s.
Driften av en induksjonsmotor blir ustabil under slipp s³s cr. Så hvis det elektromagnetiske dreiemomentet til motoren M = M maks, og slip s = s cr, så til og med en liten økning i belastningsmomentet M 2, forårsaker en økning i slip s, vil føre til en reduksjon i det elektromagnetiske dreiemomentet M. Dette vil bli fulgt av en ytterligere økning i slip, og så videre, inntil slipen når verdien s= 1, dvs. til motorrotoren stopper.
Således, når det elektromagnetiske dreiemomentet når sin maksimale verdi, inntrer grensen for stabil drift av induksjonsmotoren. Derfor, for stabil drift av motoren, er det nødvendig at summen av belastningsmomentene som virker på rotoren er mindre enn det maksimale dreiemomentet: M st \u003d (M 0 + M 2)< М тах . Men for at driften av en induksjonsmotor skal være pålitelig og slik at tilfeldige kortvarige overbelastninger ikke får motoren til å stoppe, er det nødvendig at den har overbelastningskapasitet.
Motor overbelastningskapasitet λ bestemmes av forholdet mellom det maksimale momentet M maks til nominell M nom. Til induksjonsmotorer generell overbelastningskapasitet er = 1,7 ÷ 2,5.
Du bør også ta hensyn til det faktum at driften av motoren når du glir s< s кр , dvs. i arbeidsdelen av den mekaniske karakteristikken, er den mest økonomiske, siden den tilsvarer små verdier av slip, og følgelig til lavere verdier av elektriske tap i rotorviklingen P e2 \u003d sP em.
Bruken av formelen (3.35) for å beregne de mekaniske egenskapene til asynkronmotorer er ikke alltid mulig, siden parametrene til motorekvivalentkretsen vanligvis ikke er gitt i kataloger og referansebøker, derfor, for praktiske beregninger, er vanligvis en forenklet dreiemomentformel. brukt. Denne formelen er basert på antakelsen om at den aktive motstanden til statorviklingen til en induksjonsmotor r1= 0, mens:
 (3.49)
(3.49)
Kritisk slip bestemmes av formelen:
![]() . (3.50)
. (3.50)
Beregningen av den mekaniske egenskapen er mye enklere hvis den utføres i relative enheter  . I dette tilfellet har den mekaniske karakteristiske ligningen formen:
. I dette tilfellet har den mekaniske karakteristiske ligningen formen:
 . (3.51)
. (3.51)
Bruken av en forenklet formel (3.51) er mest hensiktsmessig ved beregning av arbeidsdelen av den mekaniske karakteristikken under glidning s< s кр , siden feilen i dette tilfellet ikke overstiger verdiene som er tillatt for tekniske beregninger. Når du sklir s > s cr feilen kan nå 15-17%.
Mekaniske egenskaper til en asynkronmotor med endringer i nettspenning og aktiv motstand til rotorviklingen
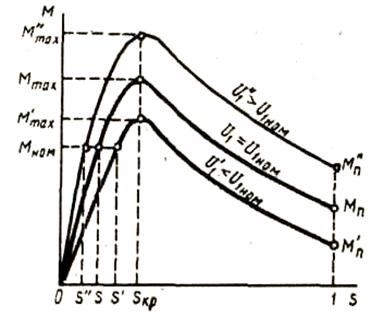
Fra (3.42), (3.44) og (3.47) kan det sees at det elektromagnetiske dreiemomentet til induksjonsmotoren, så vel som dens maksimums- og startverdier, er proporsjonale med kvadratet på spenningen som leveres til statorviklingen: M ≡ U12. Samtidig viser analysen av uttrykk (3.43) at verdien av den kritiske slip ikke er avhengig av spenningen U 1. Dette gir oss muligheten til å plotte de mekaniske egenskapene M = f(er) Til ulike verdier Spenning U 1(Fig. 3.12), hvorfra det følger at svingninger i nettspenningen U 1 om ham Nominell verdi U 1nom er ikke bare ledsaget av endringer i maksimalt og startmoment, men også av endringer i rotorhastigheten.
 |
Ris. 3.12. Påvirkning av spenning på typen mekanisk karakteristikk til en induksjonsmotor
Ved en reduksjon i nettspenningen synker rotorhastigheten (sliningen øker). Spenning U 1 påvirker tildelingen av maksimalt moment M tah, samt overbelastningskapasiteten til motoren. Så hvis spenningen U 1 redusert med 30 %, dvs. U 1 \u003d 0,7U nom, da vil det maksimale dreiemomentet til induksjonsmotoren bli mer enn halvert:
M¢ maks = 0,7 2 M maks = 0.49M maks.
Hvor mye vil overbelastningskapasiteten til motoren reduseres Hvis for eksempel ved merkespenningen til nettverket, overbelastningskapasiteten  , så når spenningen faller med 30%, overbelastningskapasiteten til motoren
, så når spenningen faller med 30%, overbelastningskapasiteten til motoren  , dvs. | motoren er ikke i stand til å bære selv den nominelle belastningen.
, dvs. | motoren er ikke i stand til å bære selv den nominelle belastningen.
Som det følger av (3.44), er ikke verdien av det maksimale motormomentet avhengig av rotorens aktive motstand r¢ 2. Når det gjelder den kritiske utglidningen s cr, da, som det fremgår av (3.43), er den proporsjonal med motstanden r¢ 2. Således, hvis i en asynkron motor den aktive motstanden til rotorkretsen gradvis økes, vil verdien av maksimalt dreiemoment forbli uendret, og den kritiske slip vil øke (fig. 3.13). I dette tilfellet, startmomentet til motoren M Pøker med økende motstand r¢ 2 opp til en viss verdi. På figuren tilsvarer dette motstanden r¢ 2 III, hvor startmomentet er lik maksimum. Med ytterligere økning i motstand r¢ 2 startmomentet reduseres.
 |
Ris. 3.13. Påvirkningen av den aktive motstanden til rotorviklingen på de mekaniske egenskapene til en asynkronmotor.
Grafanalyse M = f(s), vist i fig. 3.13 viser også at endringer i rotormotstand r¢ 2 ledsaget av endringer i rotasjonshastighet: med en økning r¢ 2 med konstant belastningsmoment M st slipingen øker, dvs. hastigheten synker (poeng 1, 2, 3 Og 4).
Påvirkningen av den aktive motstanden til rotorviklingen på formen til de mekaniske egenskapene til asynkronmotorer brukes i design av motorer. For eksempel må asynkronmotorer for generelle formål ha en "hard" hastighetskarakteristikk (se fig. 3.11), dvs. operere med en liten nominell slur. Dette oppnås ved å bruke en rotorvikling med lav aktiv motstand i motoren. r¢ 2. I dette tilfellet har motoren en høyere effektivitet på grunn av reduksjonen av elektriske tap i rotorviklingen ( R e2 \u003d m 1 I¢ 2 2 r¢ 2). Valgt verdi r¢ 2 må gi motoren det nødvendige startmomentet.
Hvis det er nødvendig å skaffe en motor med økt verdi av startmomentet, økes den aktive motstanden til rotorviklingen. Men samtidig oppnås en motor med en stor verdi av nominell slip, og følgelig med lavere effektivitet.
Vurderte avhengigheter M \u003d f (U 1) Og M = f(r 2") er også av stor praktisk betydning når man vurderer spørsmålene om start og kontroll av rotasjonshastigheten til asynkronmotorer.
Ytelsesegenskaper for asynkronmotor
Ytelsesegenskapene til en induksjonsmotor (fig. 3.14) er grafisk uttrykte avhengigheter av rotasjonshastigheten n 2, effektivitet h, nyttig moment (moment på akselen) M 2, maktfaktor cosφ 1, og statorstrøm jeg 1, fra nyttig kraft R 2 på U 1= konst og f1= konst.

Ris. 3.14. Ytelsesegenskaper for asynkronmotor
hastighetskarakteristikkn 2 \u003d f (P 2).
Induksjonsmotorens rotorhastighet
n 2 \u003d n 1 (1-s).
Skyv på (3.33)
det vil si at motorens slip, og dermed hastigheten, bestemmes av forholdet mellom elektriske tap i rotoren og den elektromagnetiske kraften R em.
Å neglisjere de elektriske tapene i rotoren i tomgangsmodus, kan vi ta R e2= 0, og derfor s0 ≈ 0 og n 20 ≈ n 1,. Når belastningen på motorakselen øker, vokser forholdet (8,1) og når verdier på 0,01 ÷ 0,08 ved nominell belastning. I samsvar med denne avhengigheten n 2 = f(P 2) er en kurve som skråner litt til x-aksen.
Imidlertid med en økning i den aktive motstanden til rotoren r¢ 2 hellingen på denne kurven øker. I dette tilfellet endres rotasjonshastigheten s 2 under lastsvingninger R 2øke. Dette forklares med at med økende r¢ 2 elektriske tap i rotoren øker [se. (3,31)].
Mekanisk ytelse M 2 = f(P 2)
Avhengigheten av det nyttige momentet på motorakselen M 2 fra nettstrøm R 2 er definert av uttrykket
 (3.53)
(3.53)
Hvor R 2— nyttig kraft, W;
er vinkelfrekvensen for rotasjon av rotoren.
Det følger av dette uttrykket at if n 2= const, deretter grafen M 2 \u003d f (P 2) er en rett linje. Men i en asynkronmotor med økende belastning R 2 rotorhastigheten avtar, og derfor det nyttige momentet på akselen M 2 med økende belastning, øker den noe raskere enn belastningen, og derfor grafen M 2 = f(P2) har et krumlinjet utseende.
Avhengighet cosφ 1 = f(P 2)
På grunn av det faktum at statorstrømmen jeg 1 har en reaktiv (induktiv) komponent som er nødvendig for å skape et magnetfelt i statoren, er effektfaktoren til asynkronmotorer mindre enn én.
Den laveste verdien av effektfaktoren tilsvarer XX-modusen. Dette forklares med at gjeldende XX jeg 0 under enhver belastning forblir praktisk talt uendret. Derfor, ved lav motorbelastning, er statorstrømmen liten og stort sett reaktiv ( I 1 ≈ I 0). Som et resultat er faseforskyvningen av statorstrømmen i forhold til spenningen betydelig ( φ ≈ φ 0 ), bare litt mindre enn 90° (fig. 3.15).
Effektfaktoren til asynkrone motorer i XX-modus overstiger vanligvis ikke 0,2. Med en økning i belastningen på motorakselen øker den aktive komponenten av strømmen jeg 1 og effektfaktoren øker, og når den høyeste verdien (0,80 ÷ 0,90) ved en belastning nær den nominelle.
 |
Fig.3.15. Vektordiagram av en induksjonsmotor under lett belastning
En ytterligere økning i belastningen er ledsaget av en reduksjon cosφ 1, som forklares av økningen i den induktive motstanden til rotoren ( x 2s) ved å øke slippet, og derav frekvensen til strømmen i rotoren. For å forbedre effektfaktoren til asynkronmotorer er det ekstremt viktig at motoren alltid går, eller i det minste en betydelig del av tiden, med en belastning nær den nominelle belastningen.
Dette kan bare sikres hvis riktig valg motorkraft. Hvis motoren går underbelastet i en betydelig del av tiden, for å øke cosφ 1 passende tilført spenning til motoren U 1 avta.
For eksempel, i motorer som opererer med en deltakobling av statorviklingen, kan dette gjøres ved å koble statorviklingene på nytt i en stjerne, noe som vil føre til en reduksjon i fasespenning i tide. I dette tilfellet synker statorens magnetiske fluks, og følgelig magnetiseringsstrømmen, med omtrent en faktor. I tillegg øker den aktive komponenten av statorstrømmen noe. Alt dette bidrar til en økning i motorens kraftfaktor.
På fig. 3.16 viser avhengighetsgrafer cosφ 1 asynkron motor fra lasten ved tilkobling av statorviklingene med en stjerne (kurve 1 ) og en trekant (kurve 2).
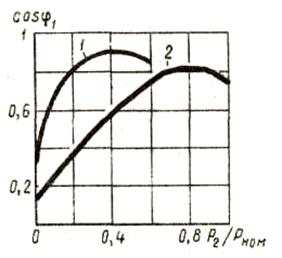
Ris. 3.16. Avhengighet cosφ 1 fra lasten når statorviklingen kobles til en stjerne (1) og en delta (2).
Spørsmål til selvransakelse
1. Forklar prinsippet for drift av en asynkron maskin.
2. Beskriv driftsmodusene til en asynkron maskin.
3. Hva kalles glidningen av en asynkron maskin?
4. Skriv ned spenningsligningene for en induksjonsmotor?
5. Skriv ned ligningene for MMF og strømmer til induksjonsmotoren.
6. Tegn de tilsvarende kretsene til en induksjonsmotor.
7. Tegn et vektordiagram av en induksjonsmotor.
8. Hvilke tap finnes i en asynkronmotor? Tegn et energidiagram for en induksjonsmotor.
9. Skriv ned formelen for det elektromagnetiske dreiemomentet til en induksjonsmotor.
10. Tegn en graf over den mekaniske egenskapen til en induksjonsmotor.
11. Hvordan endres de mekaniske egenskapene til en asynkronmotor avhengig av endringen i nettspenningen og rotorens aktive motstand?
12. Tegn driftskarakteristikkene til en induksjonsmotor.
Ytelsesegenskaper for asynkronmotor
ARBEID I ELEKTROTEKNIKK
"Ytelseskarakteristikker for asynkronmotor"
Introduksjon
En asynkron elektrisk maskin er en elektrisk vekselstrømsmaskin der rotorhastigheten ikke er lik statorens magnetfelthastighet og avhenger av belastningen. Den brukes hovedsakelig som motor og som generator. Statoren har spor der en en- eller flerfaset (vanligvis trefaset) vikling er plassert, koblet til AC-nettet. Denne viklingen er designet for å skape et bevegelig magnetfelt, roterende sirkulært - for trefasemaskiner og pulserende eller roterende elliptiske - for enfasemaskiner. Rotoren er en roterende del av en elektrisk maskin, også designet for å skape et magnetfelt, som i samspill med statorfeltet fører til dannelsen av et elektromagnetisk dreiemoment som bestemmer retningen for energikonvertering. For generatorer er dette øyeblikket av bremsekarakter, og motvirker dreiemomentet til drivmotoren, som setter rotoren i bevegelse. I motorer, tvert imot, driver dette øyeblikket, og overvinner motstanden til mekanismen som drives av rotoren.
En asynkron generator er en asynkron elektrisk maskin som opererer i generatormodus. En hjelpekilde for elektrisk strøm med lav effekt og en bremseanordning (i en elektrisk stasjon).
En asynkron elektrisk motor er en asynkron elektrisk maskin som opererer i motormodus. Den vanligste trefasede asynkrone elektriske motoren (oppfunnet i 1889 av MO Dolivo-Dobrovolsky). Asynkronmotorer er relativt enkle i design og pålitelige i drift, men har et begrenset turtallsområde og lav effektfaktor ved lav belastning. Effekt fra brøkdeler av W til titalls MW.
1. Asynkron motor
1.1 Rotasjonsfrekvens for magnetfeltet og rotoren
La n1 er rotasjonsfrekvensen til magnetfeltet. Et flerfaset vekselstrømsystem skaper et roterende magnetfelt, hvis rotasjonshastighet per minutt er n1=60f1/p, hvor f1 er frekvensen til strømmen, p er antall polpar dannet av hver fase av statoren vikling.
n2- frekvens for rotasjon av rotoren. Hvis rotoren roterer med en frekvens som ikke lik frekvensen rotasjon av magnetfeltet (n2≠n1), så kalles denne frekvensen asynkron. I en asynkronmotor kan arbeidsflyten bare kjøre med en asynkron frekvens.
Under drift er rotorhastigheten alltid mindre enn felthastigheten.
(n2< n1)
1.2 Prinsippet for drift av en asynkronmotor
I asynkronmotorer skapes et roterende magnetfelt av et trefasesystem når det kobles til et vekselstrømsnettverk. Det roterende magnetfeltet til statoren krysser lederne til rotorviklingen og induserer emf i dem. Hvis rotorviklingen er lukket for motstand eller kortsluttet, så under påvirkning av den induserte emf. strømmen går. Som et resultat av samspillet mellom strømmen i rotorviklingen med en roterende magnetfelt statorviklingen skaper et dreiemoment, under påvirkning av hvilket rotoren begynner å rotere i rotasjonsretningen til magnetfeltet. For å endre rotasjonsretningen til rotoren, er det nødvendig å bytte to av de tre ledningene som kobler statorviklingen til nettverket med hensyn til nettverksterminalene.
1.3 Enheten til en asynkronmotor
Statorkjernen er rekruttert fra stålplater, 0,35 eller 0,5 mm tykke. Platene er stemplet med spor og festet i motorrammen. Sengen er installert på fundamentet. Lederne til viklingen legges i statorens langsgående spor, som er sammenkoblet slik at det dannes et trefasesystem. For å koble statorviklingene til et trefasenettverk, kan de kobles i en stjerne eller et delta. Dette gjør det mulig å slå på motoren i et nettverk med forskjellige spenninger. For lavere spenninger (220/127 V) er statorviklingen koblet i en trekant, for høyere spenninger (380/220 V) - i en stjerne. Rotorkjernen er også rekruttert fra stålplater med en tykkelse på 0,5 mm. Platene stemples med spor og settes sammen til pakker som monteres på maskinens aksel. En sylinder med langsgående spor er dannet av pakkene, der lederne til rotorviklingen er lagt. Avhengig av type rotorvikling, kan asynkrone maskiner være fase og ekorn-burrotor. Motstand kan ikke inkluderes i en kortsluttet vikling. I faseviklingen er lederne sammenkoblet, og danner et trefasesystem. viklinger tre faser forbundet med en stjerne. Rotorviklingen kan være kortsluttet eller kortsluttet. Motorer med ekorn-burrotor er enklere og billigere, men motorer med faserotor har bedre start- og reguleringsegenskaper (de brukes ved høye effekter). Effekten til asynkronmotorer varierer fra flere titalls watt til 15 000 kW ved en statorviklingsspenning på opptil 6 kV. Ulempen med asynkronmotorer er den lave effektfaktoren.
1.4 Drift av en asynkronmotor under belastning
n1- rotasjonsfrekvensen til statorens magnetfelt. n2- frekvens for rotasjon av rotoren.
n1 >n2
Statorens magnetfelt roterer i samme retning som rotoren og glir i forhold til rotoren med en frekvens ns= n1 – n2
Rotorens etterslep fra statorens roterende magnetiske felt er preget av slip S= ns / n1, => S = (n1 - n2) / n1
Hvis rotoren står stille, da n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Hvis rotoren roterer synkront med magnetfeltet, er slip S= 0.
Ved tomgang, det vil si når det ikke er noen belastning på motorakselen, er slipingen ubetydelig og kan tas lik 0. Belastningen på rotorakselen kan for eksempel være en dreiekutter. Det skaper bremsemoment. Hvis dreiemomentet og bremsemomentet er like, vil motoren gå stabilt. Hvis belastningen på akselen har økt, vil bremsemomentet bli større enn dreiemomentet og rotorhastigheten n2 avta. I henhold til formelen S =(n1 - n2) /n1 slip vil øke. Siden statorens magnetiske felt glir i forhold til rotoren med en frekvens ns= n1 – n2, da vil den krysse rotorlederne oftere, strømmen og motormomentet vil øke i dem, som snart vil bli lik bremsemomentet. Når belastningen avtar, blir bremsemomentet mindre enn dreiemomentet, øker n2 og avtar S. EMF avtar og rotorstrømmen og dreiemomentet er igjen lik bremsen. Den magnetiske fluksen i luftgapet til maskinen forblir tilnærmet konstant for enhver endring i lasten.
2. Ytelsesegenskaper for asynkronmotor
Ytelsen til en induksjonsmotor er avhengig
S - slip
n2 - rotorhastighet
M - utviklet øyeblikk
I1 strømforbruk
P1 strøminngang
COSφ effektfaktor
Fra den nyttige kraften P2 på maskinakselen.
Disse egenskapene fjernes under naturlige forhold. Strømfrekvensen f1 og spenningen U1 forblir konstant. Bare belastningen på motorakselen endres.
Når belastningen på motorakselen øker, øker S. Når motoren går på tomgang n2≈n1, og S≈0. Ved nominell belastning er slipingen typisk 3 til 5 %.
Med en økning i belastningen på motorakselen synker rotasjonshastigheten n2. Imidlertid er endringen i hastighet med økende belastning fra 0 til nominell svært liten og overstiger ikke 5 %. Derfor er hastighetskarakteristikken til en induksjonsmotor stiv. Kurven har en veldig liten helning til den horisontale aksen.
Dreiemoment M, utviklet av motoren, balanseres av bremsemomentet på akselen Mt og øyeblikk М0, kommer til å overvinne mekaniske tap, altså M \u003d Mt + M0 \u003d P2 /Ω2+ М0, Hvor R2– nyttig motorkraft , Ω 2 - vinkelhastigheten til rotoren. På tomgang M= M0. Ved økt belastning øker også dreiemomentet, og på grunn av en liten reduksjon i rotorhastigheten skjer økningen i dreiemoment raskere enn nyttekraften på akselen.
Strømmen I1 som forbrukes av motoren fra nettverket varierer ujevnt med økende belastning på motorakselen. Ved tomgang er COSφ-effektfaktoren liten. Og strømmen har en stor reaktiv komponent. Ved lav belastning på motorakselen er den aktive komponenten av statorstrømmen mindre enn den reaktive komponenten, så den aktive komponenten av strømmen har liten effekt på strømmen I1. Ved høye belastninger blir den aktive komponenten av statorstrømmen større enn den reaktive, og en endring i belastningen forårsaker en betydelig endring i strømmen I1.
Den grafiske avhengigheten av kraften som forbrukes av motoren P1 er avbildet som en nesten rett linje, litt avvikende oppover ved høye belastninger, noe som forklares av en økning i tap i stator- og rotorviklingene med økende belastning.
COSφ-effektfaktorens avhengighet av belastningen på motorakselen er som følger. Ved tomgang er СOSφ liten, omtrent 0,2. Siden den aktive komponenten av statorstrømmen, på grunn av effekttap i maskinen, er liten sammenlignet med den reaktive komponenten til denne strømmen, som skaper en magnetisk fluks. Med en økning i belastningen på akselen øker СOSφ, og når maksimalverdien på 0,8–0,9, som et resultat av en økning i den aktive komponenten av statorstrømmen. Ved svært høye belastninger er det en liten reduksjon i COSφ, siden som et resultat av en betydelig økning i slip og strømfrekvens i rotoren, øker reaktansen til rotorviklingen.
Effektivitetskurven η har samme form som i en hvilken som helst maskin eller transformator. Ved tomgang er effektivitet = 0. Med en økning i belastningen på motorakselen øker effektiviteten kraftig, for deretter å avta. Virkningsgraden når sin høyeste verdi ved en slik belastning, når krafttapene i stål og mekaniske tap, som ikke er avhengig av belastningen, er lik effekttapene i stator- og rotorviklingene, som avhenger av belastningen.
Lignende sammendrag:
Varianter av asynkrone utøvende mikromotorer: med en hul ikke-magnetisk og magnetisk rotor; med en kortsluttet vikling som et ekornhjul. Skjema av et halvt lukket spor i den magnetiske kretsen. Oppretting av et roterende magnetfelt ved hjelp av en to-fase stator.
Enheten til en trefaset asynkron maskin, dens hovedelementer, moduser og operasjonsprinsipp, historien om opprettelse og bruk på nåværende stadium. Prosedyren og betingelsene for å oppnå et roterende magnetfelt. Avhengigheten av det elektromagnetiske dreiemomentet på slip.
Bestemmelse av det totale treghetsmomentet til girkassen, vinsjen og lasten redusert til motorakselen. Beregning av motstandsmomentet redusert til akselen under oppstigning, nedstigning. Verdien av kraften på girkasseakselen. Årsaken til forskjellen i kraft ved løfting og senking av lasten.
Beregning og design av motor, valg av hoveddimensjoner, beregning av statorviklingen. Beregning av dimensjonene til statorens tannsone og valg av luftgapet. Motormodellering i MatLab Power System Blockset-miljøet, samt med nominelle modusparametere.
Hoved- og reservebeskyttelse av turbogeneratoren.
Enhet og betinget bilde av synkron trefase maskin. Plasseringen av polene til magnetfeltet til statoren og rotoren. Avhengighet av det elektromagnetiske dreiemomentet til en synkronmaskin av vinkelen. ordningen med inkludering av synkronmotoren ved dynamisk bremsing.
Generell informasjon om asynkrone maskiner (to-vikling elektriske maskiner vekselstrøm). Utforming av aktive deler, lagerenheter, inngangsenhet for asynkron mikromotor 4АА50В2, prinsipp for dens drift, bruksområder og betydning.
Utforming av en trefaset asynkron elektrisk motor med ekorn-burrotor. Valg av motoranalog, dimensjoner, konfigurasjon, magnetisk kretsmateriale. Bestemmelse av statorviklingskoeffisient, mekanisk beregning av aksel og rullelager.
Beregning av en asynkronmotor med en ekorn-burrotor. Valg av hovedstørrelser. Beregning av dimensjonene til statorens tannsone og luftgap, rotor, magnetiseringsstrøm. Driftsmodusparametere. Beregning av tap, drifts- og startegenskaper.
Generell informasjon om asynkrone maskiner. Generell informasjon om driftsmodusene til en asynkronmotor. Analytisk og grafisk definisjon av driftsmodi for en asynkron rekonstruksjonsmaskin.
Funksjoner ved utviklingen av en asynkron elektrisk motor med en ekorn-burrotor type 4А160S4У3 basert på en generalisert maskin. Beregning av den matematiske modellen av en asynkronmotor i form av Cauchy 5. Tilstrekkelighet av modellen for direkte start av en asynkronmotor.
Metode for beregning av magnetkretsen synkron generator, valget av dens dimensjoner og konfigurasjon, konstruksjonen av egenskapene til magnetiseringen av maskinen. Bestemmelse av viklingsparametere, ytelse av termiske og ventilasjonsberegninger, monteringstegning av generatoren.
Avvisning av flere asynkron start synkronmotor, som fører til et betydelig spenningsfall i forsyningssystemet, til forekomsten av betydelige dynamiske krefter i frontdelene av statorviklingen og termisk aldring av isolasjonen.
Konstruksjon av lastdiagrammet til aktuatoren. Valg av elementer i strømkretsen. Beregning av mekaniske egenskaper. Vurdere behovet for hastighetsfeedback. Bestemmelse av gjennomsnittlig effektivitet av systemet. Forbigående prosesser i stasjonen.
Generell informasjon om enheter automatisk regulering eksitering av synkronmaskiner. Faktorer som påvirker spenningen og strømforsyningskretsen. Nåværende blandingsenhet: Nødvendige endringer i egenskapene til en blandingsmaskin.
Motormagnetisk krets. Dimensjoner, konfigurasjon, materiale. Statorkjerne, rotor og polstykke. Beregning av magnetkretsen. Luftspalte, tenner og statorrygg. Aktiv og induktiv reaktans statorviklinger for stabil tilstand.
ARBEID I ELEKTROTEKNIKK
"Ytelseskarakteristikker for asynkronmotor"
Introduksjon
asynkron elektrisk maskin- Dette er en AC-elektrisk maskin, hvor rotorhastigheten ikke er lik statorens magnetfelthastighet og avhenger av belastningen. Den brukes hovedsakelig som motor og som generator. Statoren har spor der en en- eller flerfaset (vanligvis trefaset) vikling er plassert, koblet til AC-nettet. Denne viklingen er designet for å skape et bevegelig magnetfelt, roterende sirkulært - for trefasemaskiner og pulserende eller roterende elliptiske - for enfasemaskiner. Rotoren er en roterende del av en elektrisk maskin, også designet for å skape et magnetfelt, som i samspill med statorfeltet fører til dannelsen av et elektromagnetisk dreiemoment som bestemmer retningen for energikonvertering. For generatorer er dette øyeblikket av bremsekarakter, og motvirker dreiemomentet til drivmotoren, som setter rotoren i bevegelse. I motorer, tvert imot, driver dette øyeblikket, og overvinner motstanden til mekanismen som drives av rotoren.
En asynkron generator er en asynkron elektrisk maskin som opererer i generatormodus. Hjelpekilde elektrisk strøm laveffekt og bremseanordning (i den elektriske stasjonen).
En asynkron elektrisk motor er en asynkron elektrisk maskin som opererer i motormodus. Den vanligste trefasede asynkrone elektriske motoren (oppfunnet i 1889 av MO Dolivo-Dobrovolsky). Asynkrone motorer er relativt enkle i design og pålitelige i drift, men har et begrenset hastighetsområde og lav effektfaktor ved lett belastning. Effekt fra brøkdeler av W til titalls MW.
1. Asynkron motor
1.1 Rotasjonsfrekvens for magnetfeltet og rotoren
La n 1 er rotasjonsfrekvensen til magnetfeltet. Et flerfaset vekselstrømsystem skaper et roterende magnetfelt, hvis rotasjonshastighet per minutt er n1=60f1/p, hvor f1 er frekvensen til strømmen, p er antall polpar dannet av hver fase av statoren vikling.
n 2 - frekvens for rotasjon av rotoren. Hvis rotoren roterer med en frekvens som ikke er lik rotasjonsfrekvensen til magnetfeltet (n2≠n1), kalles denne frekvensen asynkron. I en asynkronmotor kan arbeidsflyten bare kjøre med en asynkron frekvens.
Under drift er rotorhastigheten alltid mindre enn felthastigheten.
( n 2< n 1)
1.2 Prinsippet for drift av en asynkronmotor
I asynkronmotorer skapes et roterende magnetfelt av et trefasesystem når det kobles til et vekselstrømsnettverk. Det roterende magnetfeltet til statoren krysser lederne til rotorviklingen og induserer emf i dem. Hvis rotorviklingen er lukket for motstand eller kortsluttet, så under påvirkning av den induserte emf. strømmen går. Som et resultat av samspillet mellom strømmen i rotorviklingen og det roterende magnetfeltet til statorviklingen, dannes et dreiemoment, under påvirkning av hvilket rotoren begynner å rotere i magnetfeltets rotasjonsretning. For å endre rotasjonsretningen til rotoren, er det nødvendig å bytte to av de tre ledningene som kobler statorviklingen til nettverket med hensyn til nettverksterminalene.
1.3 Enheten til en asynkronmotor
Statorkjernen er rekruttert fra stålplater, 0,35 eller 0,5 mm tykke. Platene er stemplet med spor og festet i motorrammen. Sengen er installert på fundamentet. Lederne til viklingen legges i statorens langsgående spor, som er sammenkoblet slik at det dannes et trefasesystem. For å koble statorviklingene til trefaset nettverk de kan være stjerne- eller deltakoblede. Dette gjør det mulig å slå på motoren i et nettverk med forskjellige spenninger. For lavere spenninger (220/127 V) er statorviklingen koblet i en trekant, for høyere spenninger (380/220 V) - i en stjerne. Rotorkjernen er også rekruttert fra stålplater med en tykkelse på 0,5 mm. Platene stemples med spor og settes sammen til pakker som monteres på maskinens aksel. En sylinder med langsgående spor er dannet av pakkene, der lederne til rotorviklingen er lagt. Avhengig av type rotorvikling asynkrone maskiner kan være med fase og kortsluttet rotor. Motstand kan ikke inkluderes i en kortsluttet vikling. I faseviklingen er lederne sammenkoblet, og danner et trefasesystem. Viklingene til de tre fasene er forbundet med en stjerne. Rotorviklingen kan være kortsluttet eller kortsluttet. Motorer med ekorn-burrotor er enklere og billigere, men motorer med faserotor har bedre start- og reguleringsegenskaper (de brukes ved høye effekter). Effekten til asynkronmotorer varierer fra flere titalls watt til 15 000 kW ved en statorviklingsspenning på opptil 6 kV. Ulempen med asynkronmotorer er den lave effektfaktoren.
1.4 Drift av en asynkronmotor under belastning
n 1 - rotasjonsfrekvensen til statorens magnetfelt. n 2 - frekvens for rotasjon av rotoren.
n 1 > n 2
Statorens magnetfelt roterer i samme retning som rotoren og glir i forhold til rotoren med en frekvens n s = n 1 – n 2
Rotorens etterslep fra statorens roterende magnetiske felt er preget av slip S = n s / n 1, => S = ( n 1 – n 2) / n 1
Hvis rotoren står stille, da n 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1
Hvis rotoren roterer synkront med magnetfeltet, er slip S= 0.
Ved tomgang, det vil si i fravær av belastning på motorakselen, er slipingen ubetydelig og kan tas lik 0. Belastningen på rotorakselen kan for eksempel være en kutter dreiebenk. Det skaper bremsemoment. Hvis dreiemomentet og bremsemomentet er like, vil motoren gå stabilt. Hvis belastningen på akselen har økt, vil bremsemomentet bli større enn dreiemomentet og rotorhastigheten n 2 avta. I henhold til formelen S = ( n 1 – n 2) / n 1 slip vil øke. Siden statorens magnetiske felt glir i forhold til rotoren med en frekvens n s = n 1 – n 2, da vil den krysse rotorlederne oftere, strømmen og motormomentet vil øke i dem, som snart vil bli lik bremsemomentet. Når belastningen avtar, blir bremsemomentet mindre enn dreiemomentet, øker n 2 og avtar S . EMF avtar og rotorstrømmen og dreiemomentet er igjen lik bremsen. Den magnetiske fluksen i luftgapet til maskinen forblir tilnærmet konstant for enhver endring i lasten.
2. Ytelsesegenskaper for asynkronmotor
Ytelsen til en induksjonsmotor er avhengig
S - slip
n2 - rotorhastighet
M - utviklet øyeblikk
I1 strømforbruk
P1 strøminngang
COSφ effektfaktor
Fra den nyttige kraften P2 på maskinakselen.
Disse egenskapene fjernes under naturlige forhold. Strømfrekvensen f1 og spenningen U1 forblir konstant. Bare belastningen på motorakselen endres.
Når belastningen på motorakselen øker, øker S. Når motoren går på tomgang n2≈n1, og S≈0. Ved nominell belastning er slipingen typisk 3 til 5 %.
Med en økning i belastningen på motorakselen synker rotasjonshastigheten n2. Imidlertid er endringen i hastighet med økende belastning fra 0 til nominell svært liten og overstiger ikke 5 %. Derfor, hastighetskarakteristikk induksjonsmotoren er tøff. Kurven har en veldig liten helning til den horisontale aksen.
Dreiemoment M, utviklet av motoren, balanseres av bremsemomentet på akselen Mt og øyeblikk M 0 , kommer til å overvinne mekaniske tap, altså M= Mt + M 0 =P 2 /Ω 2 + M 0 , Hvor R 2 – nyttig motorkraft , Ω 2 - vinkelhastigheten til rotoren. På tomgang M=M 0. Ved økt belastning øker også dreiemomentet, og på grunn av en liten reduksjon i rotorhastigheten skjer økningen i dreiemoment raskere enn nyttekraften på akselen.
Strømmen I1 som forbrukes av motoren fra nettverket varierer ujevnt med økende belastning på motorakselen. Ved tomgang er COSφ-effektfaktoren liten. Og strømmen har en stor reaktiv komponent. Ved lav belastning på motorakselen er den aktive komponenten av statorstrømmen mindre enn den reaktive komponenten, så den aktive komponenten av strømmen har liten effekt på strømmen I1. Ved høye belastninger blir den aktive komponenten av statorstrømmen større enn den reaktive, og en endring i belastningen forårsaker en betydelig endring i strømmen I1.
Den grafiske avhengigheten av kraften som forbrukes av motoren P1 er avbildet som en nesten rett linje, litt avvikende oppover ved høye belastninger, noe som forklares av en økning i tap i stator- og rotorviklingene med økende belastning.
COSφ-effektfaktorens avhengighet av belastningen på motorakselen er som følger. Ved tomgang er СOSφ liten, omtrent 0,2. Siden den aktive komponenten av statorstrømmen, på grunn av effekttap i maskinen, er liten sammenlignet med den reaktive komponenten til denne strømmen, som skaper en magnetisk fluks. Med en økning i belastningen på akselen øker СOSφ, og når maksimalverdien på 0,8–0,9, som et resultat av en økning i den aktive komponenten av statorstrømmen. Ved svært høye belastninger er det en liten reduksjon i COSφ, siden som et resultat av en betydelig økning i slip og strømfrekvens i rotoren, øker reaktansen til rotorviklingen.
Effektivitetskurven η har samme form som i en hvilken som helst maskin eller transformator. Ved tomgang er effektivitet = 0. Med en økning i belastningen på motorakselen øker effektiviteten kraftig, for deretter å avta. Største verdi Virkningsgraden oppnås ved en slik belastning, når krafttapene i stål og mekaniske tap, som ikke er avhengig av belastningen, er lik effekttapene i stator- og rotorviklingene, som avhenger av belastningen.
Elektromagnetisk moment
.
Fullstendig mekanisk kraft motor
skapes som et resultat av rotasjon av rotoren med en vinkelhastighet ω 2 under påvirkning av momentet M em dvs.
P fur \u003d M em ω 2 (2,19)
Denne effekten kan bestemmes fra den ekvivalente kretsen som elektrisk energi, som skiller seg ut på den betingede lastmotstanden R-brønn ", multiplisert med antall statorfaser:
P pels = m 1 (I 2 ") 2 R 2 " (1-s) / s (2,20)
Basert på (2.19) og (2.20), tatt i betraktning (2.8), kan vi skrive
M em \u003d (m 1 (I 2") 2 R 2 "/s) / ω 1 (2,21)
Ved beregning av momentet i henhold til formelen (2.21), strømmen jeg 2" bestemmes av den ekvivalente kretsen (fig. 2.10) for den tilsvarende slip.
Formel (2.21) kan transformeres ved å erstatte strømmen med uttrykket i den jeg 2", oppnådd under visse forutsetninger fra den tilsvarende kretsen
M em \u003d (m 1 U 1 R 2 "/s) / ω 1 ((R 1 + CR 2 / s) 2 + (x 1 + Cx 2") 2) (2,22)
Koeffisient C, som går inn i formel (2.22), er modulen kompleks koeffisient MED
= 1 + (z 1 /z m) som dukker opp under transformasjonen. Forutsetningen er å ta hensyn til kun modulen til koeffisienten MED
, fordi argumentet i ekte maskiner er veldig lite. I ekte maskiner (unntatt mikromaskiner) MED
= 1,03–1,08 og kl kvalitativ analyse noen ganger tar MED
=
1.
Uttrykk (2.21) kan også transformeres ved å uttrykke det aktive spenningsfallet i rotoren I 2 "R 2" / s gjennom EMF basert på formlene (2.15) og (2.16)
I 2 "R 2" /s \u003d E 2 "cos ψ 2 (2,23)
Ved å erstatte (2.23) i (2.21) og utføre transformasjoner, tar vi hensyn til (2.18) og (2.12), får vi
M em \u003d k F m I 2 "cos ψ 2 (2,24)
Hvor k- konstruktiv koeffisient.
Som det fremgår av (2.24), er det elektromagnetiske momentet direkte proporsjonalt med den magnetiske hovedfluksen F m og den aktive komponenten av rotorstrømmen jeg 2" cos ψ 2.
Dreiemomentformler (2.21), (2.22) og (2.24) er oppnådd for motormodus, men de er også gyldige for andre moduser, tatt i betraktning fortegnet og området for glideverdier s. Avhengigheten av det elektromagnetiske dreiemomentet av slip er grafisk presentert i fig. 2.11 (heltrukken linje).
Denne typen karakteristikk er lett forklart ved hjelp av formler (2.24), (2.15) og (2.16). Med økende slip, rotorstrømmen jeg 2øker kontinuerlig, men blir mer og mer induktiv - avtar cos ψ 2 når frekvensen til strømmene i rotoren øker og følgelig dens induktive motstand. Som et resultat øker den aktive komponenten av rotorstrømmen og følgelig det elektromagnetiske dreiemomentet først og begynner deretter å avta.
Slippet hvor momentet når maksimalverdien M max kalles kritisk og er betegnet med scr. For å bestemme scr, er det nødvendig, ved å bruke uttrykk (2.22), å ta den deriverte dM em /ds og likestille det til null. Løsningen av den resulterende ligningen har formen
s cr \u003d ±C R 2 " / √ (R 1" + 2) (2,25)
Tar vi inn den første tilnærmingen C 1 ≈ 1 og R 1 ≈ 0, får vi
s cr = ±R 2 " /(x 1+x2") (2.26)
De fleste induksjonsmotorer krever høy effektivitet. Derfor har den aktive motstanden til viklingene, spesielt R2, som bestemmer nivået av elektriske tap i rotoren, en tendens til å være liten. I dette tilfellet ligger den kritiske slip i området .
Vi erstatter (2.25) i (2.22) og får uttrykket for maksimalt øyeblikk:
M maks = ± m 1 U 1 2 /2 ω 1 C [± R 1 + √(R 1 2 +(x 1 + Cx 2) 2)] (2,27)
"+"-tegnet refererer til motormodus, "-" - til generatormodus.
Som du kan se, er det maksimale momentet proporsjonalt med kvadratet forsyningsspenningen, er ikke avhengig av den aktive motstanden til rotorkretsen R2 og oppstår med større slip, desto større er den aktive motstanden til rotorkretsen (fig. 2.11, stiplet linje, R2B >R2A).
Startmoment motor M p bestemmes av uttrykk (2.22) for s=1. Betydning M p proporsjonal med kvadratet på forsyningsspenningen og øker med økende R2(se fig. 2.11), når et maksimum ved s cr =1.
Den nominelle slip snom, som tilsvarer det nominelle dreiemomentet Mnom, øker med økende R 2 . Dette er ledsaget av en økning i elektriske tap i rotorkretsen og en reduksjon i effektivitet. For asynkronmotorer med lav kritisk slip, S nom = 0,02 - 0,06.
Likevektslikning av momenter på motorakselen.
Det elektromagnetiske momentet utviklet av motoren overvinner belastningsmomentet M n som påføres motorakselen og motorens eget motstandsmoment M 0 (tomgangsmoment), bestemt av mekaniske og tilleggstap i motoren. Det resulterende øyeblikket bestemmer verdien og tegnet på rotorakselerasjonen:
dω / dt \u003d (M em - M 0 - M n) / J (2,28)
Hvor J- treghetsmomentet til de roterende delene - rotoren og lasten.
Dette er en differensialligning for bevegelse av en elektrisk stasjon, bestående av en motor og en last, omgjort til formen
M em \u003d M 0 + M n + J (dω / dt) (2,29)
kalt ligningen for likevekt av momenter på motorakselen.
I denne ligningen:
M 0 + M n \u003d M st- statisk motstandsmoment,
J(dω/dt)= M dyn er det dynamiske motstandsmomentet.
Elektromagnetisk moment M eh minus øyeblikk M0 kalt det nyttige eller dreiemomentet på akselen og betegner M2. Fra ligningene (2.28) og (2.29) følger det at:
1) hvis M eh = M st, Det dω/dt = 0, ω
= konst d.v.s. motoren går i stabil (statisk) modus, mens M2 = M n;
2) hvis M eh> M st, så øker vinkelhastigheten til rotoren, dvs. motoren fungerer i en forbigående (dynamisk) modus;
3) hvis M eh< M st, da avtar rotorens vinkelhastighet, dvs. motoren går i transient modus.
I generell sak Når man setter sammen ligningen for momentens likevekt, bør man ta hensyn til momentenes tegn, som bestemmes av momentenes virkeretning i forhold til den positive rotasjonsretningen. Hvis motoren genererer et elektromagnetisk dreiemoment som virker i positiv retning, anses dreiemomentet som positivt ( M eh> 0). Hvis motoren går i bremsemodus, begynner dreiemomentet å virke i motsatt retning ( M eh< 0).
De statiske motstandsmomentene skapt av arbeidsmekanismen og overføringsenheten er av to typer: reaktive og aktive. De reaktive motstandsmomentene er alltid rettet mot rotasjonsretningen, dvs. er hemmende ( M st< 0). К реактивным
моментам относятся моменты сил трения, в том числе в самом двигателе, моменты
сопротивления при резании металла на обрабатывающих станках и т.д. Активный момент
всегда действует в одном и том же направлении, независимо от направления вращения,
т.е. может либо препятствовать движению (M st> 0), eller bidra til det ( M st< 0). К активным
моментам относятся моменты сил тяжести, сил упругости пружин и т.д.
Mekaniske egenskaper.
Ligningen for den naturlige mekaniske egenskapen til en induksjonsmotor er uttrykket (2.21) eller (2.22) med slip S erstattet av vinkelhastigheten ω 2 i henhold til (2.8) for U 1 = konst. Den karakteristiske grafen er vist i fig. 2.12, a.

Fig.2.12
La oss vurdere den mekaniske egenskapen når det gjelder stabilitet, stivhet og linearitet.
Det anses at motoren i en åpen drift fungerer stabilt hvis den, etter at forstyrrelsen er fjernet, automatisk går tilbake til det opprinnelige driftspunktet på den mekaniske karakteristikken. Mekanisk karakteristikk motor er avhengigheten av rotorens vinkelhastighet på det elektromagnetiske dreiemomentet: ω 2 \u003d f (M em).Den mekaniske karakteristikken til lasten er avhengigheten av det statiske motstandsmomentet på motorakselen av vinkelhastigheten: M st \u003d f (ω 2).
Teoretisk sett er stabil drift av motoren mulig på punkter A 1 Og A 2, Hvor M eh=M st.A. La motoren gå med belastning M st.A \u003d konst på punktet A 1 og det oppstår en forstyrrelse som fører til en økning i vinkelhastigheten??. Motoren genererer da et dreiemoment som tilsvarer punktet A 1", og belastningen er motstandsmomentet som tilsvarer punktet A 1. Hvori M eh<M st, i samsvar med momentlikevektsligningen, vinkelhastigheten ω 2 avtar og motoren går tilbake til punktet A 1. Gå tilbake til punktet A 1 vil også skje med en negativ økning av hastighet (punkt A 1""). Hvis motoren går med belastning på punktet A 2, så med en forstyrrelse som fører til en økning i hastighet, skaper motoren et dreiemoment som tilsvarer punktet A 2", og belastningen er motstandsmomentet som tilsvarer punktet A 2. Hvori M eh>M st og vinkelhastigheten fortsetter å øke, motoren beveger seg bort fra punktet A 2. Gå tilbake til punktet A 2 oppstår ikke selv med en negativ hastighetsøkning (punkt A 2""). I dette tilfellet vil hastigheten fortsette å synke til motoren stopper.
Derfor, på punktet A 1 motoren går jevnt og trutt, og på punktet A 2- ustabil. I det generelle tilfellet er ulikheten et formelt tegn på stabil drift av motoren
(dM em /dω 2)< (dM ст /dω 2) (2.30)
Med et lastemoment som ikke er avhengig av hastighet, d.v.s. på M st \u003d ulemper t, denne ulikheten tar formen
(dω 2 /dM em)< 0 (2.31)
Basert på konseptet om stabiliteten til motoren i en åpen drift, er det vanlig å kalle motorens mekaniske karakteristikk stabil hvis den sikrer stabil drift av motoren kl. M st \u003d konst.
Hvis vi bruker det formelle stabilitetskriteriet (2.31), så er det lett å vise det for M st \u003d konst stabil drift av motoren sikres kun i området fra ω 1 før ω 2cr. Plot fra ω 2cr opptil 0 er ustabil. Driftsområdet for dreiemomenter og hastigheter for elektriske stasjoner med asynkronmotorer velges innenfor den stabile delen av motorens mekaniske egenskaper. Nominelt lastepunkt M nom er plassert på arbeidsområdet på en slik måte at overbelastningskapasiteten K m \u003d M maks / M nom \u003d 1,7 -3,5. Med lav rotormotstand R2 kritisk hastighet ω 2cr \u003d (0,8 - 0,9) ω 1 og arbeidsområdet er hardt. Den mekaniske karakteristikken er generelt ikke-lineær, men arbeidsområdet er nær lineært.
Innenfor arbeidsområdet regulerer motoren seg selv. Økningen i motstandsmomentet på motorakselen fra M st.v før M st.s fører til en reduksjon i vinkelhastigheten til rotoren fra ω 2v før ω 2s, en økning i EMF og strøm indusert i rotoren av et roterende felt, og følgelig en økning i det elektromagnetiske momentet til en verdi lik den nye verdien av motstandsmomentet (overgang fra punktet I nøyaktig MED på den mekaniske egenskapen).
Driftsegenskaper
.
Ytelsesegenskapene til en induksjonsmotor er avhengigheten av rotorens vinkelhastighet ω 2, nyttig øyeblikk M 2, effektivitet η
, maktfaktor cos φ 1(φ 1- faseskift mellom U 1 Og jeg 1) og statorstrøm jeg 1 fra nyttekraft P2 kl U 1 = U nom Og f1 = f nom(Fig. 2.12, b). Ytelseskarakteristikker kan enten tas eksperimentelt eller beregnes ved hjelp av en ekvivalent krets.
Når du bytter fra x.x. (motoren er ikke belastet) til nominell belastningsmodus, reduseres vinkelhastigheten til rotoren litt, fordi ω 2 \u003d (1 - s) ω 1, A S nom, som nevnt, er enheter av prosent. Følgelig et nyttig øyeblikk M 2 \u003d P 2 / ω 2øker i henhold til en lov nær lineær. Endringen i statorstrømmen bestemmes av rotorens respons; den relativt store verdien av strømmen ved tomgang skyldes tilstedeværelsen av et luftgap. Nåværende x.x. for det meste induktiv, og tilsvarende lav cos φ 10- ca. 0,1 - 0,2. Når belastningen øker, øker den forbrukte aktive elektriske kraften og cos φ 1 vokser - dens maksimale verdi når 0,7 - 0,9. Strømmen beholder en aktiv-induktiv karakter ( φ 1>0) og forsyningsnettet er belastet med reaktiv strøm. Motoreffektivitet η \u003d R 2 / R 1, Hvor R 1- aktiv elektrisk kraft som forbrukes av motoren. Med symmetrisk kraft R 1 \u003d m 1 U 1 I 1 cos φ 1, Hvor U 1, jeg 1– fasespenning og strøm. Effektivitetsavhengighet av kraft P 2 \u003d P 1 -Δp e -Δp m -Δp pels har samme utseende som transformatoren, pga i motoren er tap også delt inn i faste og variable tap. For maskiner med liten og middels kraft, maksimal verdi av effektivitet η
= 0,7 - 0,9, mens lavere verdier refererer til motorer med lavere effekt, som har en relativt høyere aktiv motstand av viklingene.





