I en rekke land til asynkrone maskiner samlemaskiner er også inkludert. Et annet navn for asynkrone maskiner er induksjon på grunn av at strømmen i rotorviklingen induseres av statorens rotasjonsfelt. Asynkrone maskiner utgjør i dag størstedelen av elektriske maskiner. De brukes hovedsakelig som elektriske motorer og er hovedomformere. elektrisk energi til mekanisk.
Fordeler:
- Enkel produksjon.
- Ingen mekanisk kontakt med den statiske delen av maskinen.
Feil:
- Liten Startmoment.
- Betydelig startstrøm.
Historie
Prioriteten i å lage en induksjonsmotor tilhører Nikola Tesla, som i Budapest våren 1882 løste problemet med å lage en roterende magnetfelt med fast flerfasevikling vekselstrøm, og i 1884 i Strasbourg demonstrerte han en fungerende modell av motoren sin. Et bidrag til utviklingen av asynkronmotorer ble gitt av Galileo Ferraris, som i 1885 i Italia bygde en modell av en 3 W induksjonsmotor. I 1888 publiserte Ferraris sin forskning i en artikkel for Royal Academy of Sciences i Torino (samme år mottok Tesla amerikansk patent 381 968 datert 05/01/1888 ( OSS. Patent 0 381 968 | søknad om oppfinnelse nr. 252132 datert 10/12/1887), som skissert teoretisk grunnlag asynkron motor. Fordelen med Ferraris er at de har gjort en feilaktig konklusjon om en liten effektivitet. asynkron motor og uhensiktsmessigheten av å bruke vekselstrømsystemer, trakk han oppmerksomheten til mange ingeniører på problemet med å forbedre asynkrone maskiner. En artikkel av Galileo Ferraris publisert i tidsskriftet "Atti di Turino" ble trykt på nytt av et engelsk tidsskrift og ble lest i juli 1888 av en utdannet ved Darmstadt Higher Technical School, hjemmehørende i Russland, Mikhail Osipovich Dolivo-Dobrovolsky. Allerede i 1889 mottok Dolivo-Dobrovolsky patent på en trefaset asynkronmotor med en ekorn-burrotor, og i 1890 - patenter i England nr. 20425 og Tyskland nr. 75361 for en trefaset asynkronmotor med en faserotor . Disse oppfinnelsene åpnet æraen med masseindustriell bruk av elektriske maskiner. For tiden er asynkronmotoren den vanligste elektriske motoren.
Design
En asynkron maskin har en stator og rotor atskilt med en luftspalte. Dens aktive deler er viklinger og en magnetisk krets (kjerne); alle andre deler er strukturelle, gir nødvendig styrke, stivhet, kjøling, mulighet for rotasjon, etc.
Statorviklingen er en trefaset (in generell sak- flerfaset) vikling, hvis ledere er jevnt fordelt rundt omkretsen av statoren og er fase-for-fase lagt i spor med en vinkelavstand på 120 el.deg. Fasene til statorviklingen er forbundet med standard ordninger"trekant" eller "stjerne" og koble til nettverket trefasestrøm. Den magnetiske statorkretsen remagnetiseres i prosessen med å endre strømmen i statorviklingen, så den rekrutteres fra elektriske stålplater for å sikre minimale magnetiske tap. Hovedmetoden for å sette sammen den magnetiske kretsen til en pakke er blanding.
I henhold til utformingen av rotoren er asynkrone maskiner delt inn i to hovedtyper: med kortsluttet rotor og fase rotor. Begge typer har samme statordesign og skiller seg bare i utformingen av rotorviklingen. Den magnetiske rotorkretsen er laget på samme måte som statormagnetkretsen - fra elektriske stålplater.
ekorn-burrotor
Rotor asynkron maskin type ekornbur
Den kortsluttede rotorviklingen, ofte kalt "ekornburet" på grunn av den ytre likheten til designet, består av kobber- eller aluminiumstenger, kortsluttet i endene med to ringer. Stengene til denne viklingen settes inn i sporene til rotorkjernen. Kjernene til rotoren og statoren har en girstruktur. I maskiner med liten og middels kraft, er viklingen vanligvis laget ved å helle smeltet aluminiumslegering inn i sporene i rotorkjernen. Sammen med «ekornbur»-stengene er det støpt kortslutningsringer og endeblader som ventilerer maskinen. I høyeffektsmaskiner er "ekornburet" laget av kobberstenger, hvis ender er koblet til kortslutningsringer ved sveising.
Ofte er sporene på rotoren eller statoren skråstilt for å redusere høyere harmonisk EMF forårsaket av magnetiske fluksbølger på grunn av tilstedeværelsen av tenner, hvis magnetiske motstand er betydelig lavere enn den magnetiske motstanden til viklingen, samt for å redusere støyen forårsaket av magnetiske årsaker. For å forbedre startytelsen asynkron elektrisk motor med en ekorn-burrotor, nemlig en økning i startmoment og en reduksjon i startstrøm, brukes en spesiell sporform på rotoren. I dette tilfellet har den ytre delen av rotorspalten fra rotasjonsaksen et mindre tverrsnitt enn den indre delen. Dette lar deg bruke effekten av strømforskyvning, på grunn av hvilken den aktive motstanden til rotorviklingen øker ved store glipper (under oppstart).
Asynkronmotorer med ekorn-burrotor har et lite startmoment og en betydelig startstrøm, noe som er en betydelig ulempe med "ekornburet". Derfor brukes de i de elektriske stasjonene der store startmomenter ikke er nødvendig. Av fordelene bør det bemerkes enkel produksjon, og fraværet av elektrisk kontakt med den statiske delen av maskinen, noe som garanterer holdbarhet og reduserer vedlikeholdskostnadene. Med en spesiell utforming av rotoren, når bare en hul aluminiumssylinder roterer i luftgapet, er det mulig å oppnå lav treghet i motoren.
faserotor
Faserotoren har en trefaset (i det generelle tilfellet en flerfaset) vikling, vanligvis koblet i henhold til "stjerne"-skjemaet og brakt ut til skliringer som roterer med maskinakselen. Ved hjelp av grafitt- eller metall-grafittbørster som glir langs disse ringene, inn i rotorviklingskretsen:
- inkludere ballast reostatacting som en ekstra aktiv motstand, den samme for hver fase. Ved å redusere startstrømmen økes startmomentet til maksimumsverdien (i første øyeblikk). Slike motorer brukes til å drive mekanismer som settes i verk når tung last eller krever jevn hastighetskontroll.
- inkludere induktanser (chokes) i hver fase av rotoren. Motstanden til chokene avhenger av frekvensen til den flytende strømmen, og som du vet, i rotoren i det første øyeblikket av oppstart, er frekvensen av glidestrømmer høyest. Når rotoren snurrer opp, synker frekvensen av de induserte strømmene, og med det avtar induktormotstanden. Induktiv reaktans i faserotorkretsen lar deg automatisere prosedyren for å starte motoren, og om nødvendig å "fange" motoren, hvis hastighet har falt på grunn av overbelastning. Induktansen holder rotorstrømmene på et konstant nivå.
- inkludere kilde likestrøm, og dermed oppnå en synkronmaskin.
- inkluderer strøm fra omformeren, som lar deg kontrollere hastigheten og dreiemomentkarakteristikkene til motoren. Dette er en spesiell driftsmodus (dobbelmatermaskin). Det er mulig å slå på nettspenningen uten omformer, med en fasing motsatt den som statoren drives med.
Schrage-Richter motor
Tre-fase kommutator asynkron motor matet fra rotorsiden.
Invertert (drevet fra rotoren) asynkronmotor, som lar deg jevnt justere hastigheten fra minimum (området bestemmes av viklingsdataene til tilleggsviklingen som brukes for å oppnå ekstra emf, introdusert med slipfrekvensen i sekundærkretsen til maskinen) til det maksimale, som vanligvis ligger over hastighetssynkronismen. Fysisk produsert ved å endre løsningen av et dobbelt sett med børster for hver "fase" i motorens sekundære krets. Ved å omorganisere børstetraversene ved hjelp av en mekanisk enhet (håndhjul eller annen aktuator), var det mulig å kontrollere hastigheten til en AC-induksjonsmotor veldig økonomisk. Ideen om kontroll generelt er ekstremt enkel og vil bli implementert senere i de såkalte asynkrone ventilkaskadene, der en tyristoromformer ble inkludert i faserotorkretsen, som fungerte som en inverter eller i en likerettermodus. Essensen av ideen er at en ekstra emf introduseres i sekundærkretsen til en induksjonsmotor. variabel amplitude og fase med glidefrekvens. Kollektoren utfører oppgaven med å matche frekvensen til den ekstra emf med glidefrekvensen til rotoren. Dersom den ekstra e.m.f. er motsatt av den viktigste, kraften avgis fra motorens sekundære krets med en tilsvarende reduksjon i maskinens hastighet, den nedadgående hastighetsgrensen er kun diktert av kjøleforholdene til viklingene). Ved synkroniseringspunktet til maskinen, frekvensen til den ekstra emf. er lik null, det vil si at en likestrøm tilføres sekundærkretsen av kollektoren. Ved summering av tilleggs-e.m.f. med den viktigste inverteres den ekstra kraften inn i maskinens sekundære krets, og følgelig akselerasjon over den synkrone hastigheten. Dermed ble resultatet av regulering en familie med ganske rigide egenskaper med avtagende kritisk øyeblikk ved nedbremsing, og ved akselerasjon over synkron hastighet - med sin proporsjonale økning.
Av spesiell interesse er driften av maskinen med en asymmetrisk løsning av børstetraverser. I dette tilfellet, vektordiagrammet for den ekstra emf. motor mottar den såkalte tangentielle komponenten, som gjør det mulig å arbeide med en kapasitiv respons på nettverket.
Strukturelt er motoren en omvendt maskin, der to viklinger er lagt på rotoren: strømforsyning fra sleperinger og en vikling koblet til statorens sekundære vikling ved hjelp av to par børster per "fase". Faktisk disse to delene sekundærvikling Avhengig av posisjonen til børstens traversering, slås den på enten i henhold til hverandre eller i motsatte retninger. Slik fungerer reguleringen.
Slike motorer fikk den største utviklingen på 30-tallet av XX-tallet. I Sovjetunionen, med sin lave produksjonskultur av den elektriske industrien, fikk ikke AC-samlermaskiner (ACC) noen merkbar distribusjon og utvikling på grunn av økte krav til produksjon av samler-børste-enheten og de generelle høye kostnadene. De penetrerte Sovjetunionens territorium hovedsakelig som en del av utstyr kjøpt i utlandet, og ved første anledning ble de erstattet av mindre effektive, men billigere likestrømsmaskiner eller asynkronmotorer med faserotor. Eksisterende metoder for beregning av c.m.f. utviklet av akademiker M.P. Kostenko (i lærebøkene hans er asynkrone maskiner delt inn i samler- og børsteløse) anses som et tilstrekkelig kriterium for maskinens ytelse ved å sjekke den i henhold til bryterforholdene (til sammenligning er termisk beregning kritisk for en DC-motor) .
For tiden er Schrage-motoren av interesse utelukkende som et utmerket visuelt hjelpemiddel for studenter. I følge L. Ya. Telichko, lærer ved avdelingen for elektrisk drift ved Lipetsk tekniske universitet, " beste modellen, hvor teorien og praksisen til kaskaden kan berøres av hender, er det umulig å finne.
Driftsprinsipp
påført statorviklingen AC spenning, under virkningen av hvilken en strøm flyter gjennom disse viklingene og skaper et roterende magnetfelt. Magnetfeltet virker på rotorviklingen og induserer, i henhold til loven om elektromagnetisk induksjon, en EMF i dem. I rotorviklingen, under påvirkning av den induserte EMF, oppstår en strøm. Strømmen i rotorviklingen skaper sitt eget magnetfelt, som samhandler med det roterende magnetfeltet til statoren. Som et resultat virker en kraft på hver tann i rotorens magnetiske krets, som, sammenlagt rundt omkretsen, skaper et roterende elektromagnetisk moment som får rotoren til å rotere.
Statorfeltets rotasjonshastighet
Når statorviklingen forsynes med en trefaset (generelt flerfaset) strøm, dannes et roterende magnetfelt, hvis synkrone rotasjonsfrekvens [rpm] er relatert til nettfrekvensen [Hz] med forholdet:
,hvor er antall par magnetiske poler til statorviklingen.
Avhengig av antall polpar, er følgende verdier av rotasjonsfrekvensene til statormagnetfeltet mulig, ved en forsyningsspenningsfrekvens på 50 Hz:
| n, rpm | |
|---|---|
| 3000 | 1 |
| 1500 | 2 |
| 1000 | 3 |
| 300 | 10 |
De fleste motorer har 1-3 par poler, sjelden 4. Et større antall poler brukes svært sjelden, slike maskiner har lav effektivitet og effektfaktor, men de lar motorrotoren rotere veldig jevnt og sakte.
Driftsmoduser
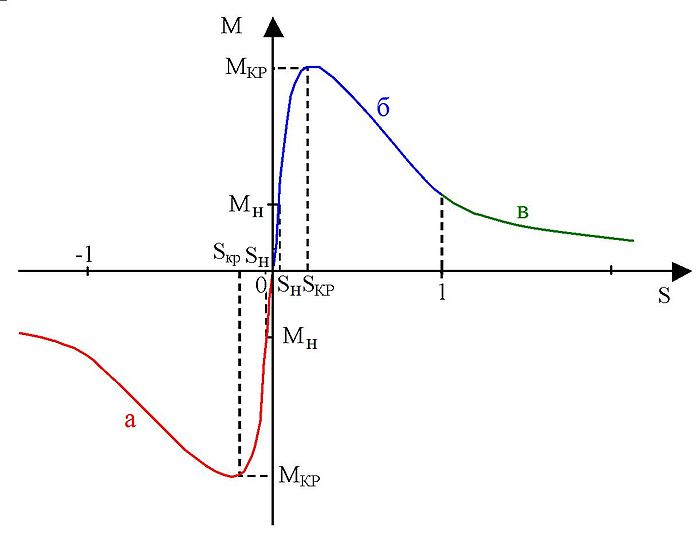
Mekanisk karakteristikk av en asynkron maskin: a - energigjenvinningsmodus til nettverket (generatormodus), b - motormodus, c - mot-inkluderingsmodus (elektromagnetisk bremsemodus).
Motormodus
Hvis rotoren er stasjonær eller dens rotasjonsfrekvens er mindre enn synkron, krysser det roterende magnetfeltet lederne til rotorviklingen og induserer en EMF i dem, under påvirkning av hvilken en strøm oppstår i rotorviklingen. Elektromagnetiske krefter virker på lederne med strømmen til denne viklingen (eller rettere sagt, på tennene til rotorkjernen); deres totale kraft danner et elektromagnetisk dreiemoment som drar rotoren sammen med magnetfeltet. Hvis dette momentet er tilstrekkelig til å overvinne friksjonskreftene, begynner rotoren å rotere, og dens jevne rotasjonshastighet [rpm] tilsvarer ligningen elektromagnetisk dreiemoment brems, skapt av belastningen på akselen, friksjonskrefter i lagre, ventilasjon osv. Rotorhastigheten kan ikke nå magnetfelthastigheten, siden i dette tilfellet vil vinkelhastigheten til magnetfeltets rotasjon i forhold til rotorviklingen bli lik. til null vil magnetfeltet slutte å indusere i rotorviklingen EMF og i sin tur skape dreiemoment; Således, for motordriftsmodusen til en asynkron maskin, er ulikheten sann:
.Den relative forskjellen mellom rotasjonsfrekvensene til magnetfeltet og rotoren kalles skyve:
.Det er åpenbart at i motormodus .
generatormodus
Hvis rotoren akselereres ved hjelp av et eksternt dreiemoment (for eksempel av en motor) til en frekvens som er større enn rotasjonshastigheten til magnetfeltet, vil retningen til EMF i rotorviklingen og den aktive komponenten til rotoren strøm vil endres, det vil si at den asynkrone maskinen vil gå inn generatormodus. Samtidig vil også retningen på det elektromagnetiske dreiemomentet endres, som vil bli bremsing. Slipp i generatormodus.
For å betjene en asynkron maskin i generatormodus kreves en reaktiv kraftkilde som skaper et magnetfelt. I fravær av et innledende magnetfelt i statorviklingen, skapes fluksen ved hjelp av permanente magneter, eller med en aktiv belastning på grunn av gjenværende induksjon av maskinen og kondensatorer koblet parallelt med fasene til statorviklingen.
En asynkron generator forbruker reaktiv strøm og krever tilstedeværelse av reaktive kraftgeneratorer i nettverket i form av synkronmaskiner, synkrone kompensatorer og statiske kondensatorbanker (BCS). På grunn av dette, til tross for det enkle vedlikeholdet, asynkron generator brukes relativt sjelden, hovedsakelig som laveffekts vindgeneratorer, hjelpekilder for laveffekt og bremseanordninger. Men generatormodusen til en asynkronmotor brukes ganske ofte. I denne modusen fungerer motorene til t-banens rulletrapper, som går ned. I generatormodus fungerer heismotorene, avhengig av vektforholdet i kabinen og i motvekten.
Inaktiv modus
Tomgangsmodusen til en asynkronmotor oppstår når det ikke er noen belastning på akselen i form av en girkasse og et arbeidslegeme. Fra opplevelsen av tomgang kan verdiene til magnetiseringsstrømmen og effekttapene i den magnetiske kretsen, i lagrene og i viften bestemmes. Virkelig tomgang s=0,01-0,08. I perfekt hvilemodus n 2 =n 1, derfor s=0 (faktisk er denne modusen uoppnåelig, selv under antagelsen om at friksjon i lagrene ikke skaper sitt eget belastningsmoment - selve prinsippet for motordrift innebærer at rotoren henger etter statorfeltet for å skape et rotorfelt. s=0 statorfeltet krysser ikke rotorviklingene og kan ikke indusere strøm i det, noe som betyr at rotormagnetfeltet ikke dannes.)
Elektromagnetisk bremsemodus (ekstrautstyr)
Hvis du endrer rotasjonsretningen til rotoren eller magnetfeltet slik at de roterer i motsatte retninger, vil EMF og den aktive komponenten av strømmen i rotorviklingen bli rettet på samme måte som i motormodus, og maskinen vil bruke aktiv strøm fra nettverket. Imidlertid vil det elektromagnetiske momentet være rettet motsatt av lastmomentet, da det er et bremsemoment. Følgende ulikheter gjelder for regimet:
Denne modusen brukes i kort tid, siden det genereres mye varme i rotoren, som motoren ikke er i stand til å spre, noe som kan skade den.
For mykere bremsing kan generatormodus brukes, men den er effektiv bare ved hastigheter nær de nominelle.
Måter å kontrollere en asynkronmotor på
Under kontroll av en asynkron AC-motor menes en endring i rotorhastigheten og/eller dens dreiemoment. Det er følgende måter å kontrollere en asynkronmotor på:
- reostatisk - endring av rotasjonshastigheten til IM med en faserotor ved å endre motstanden til reostaten i rotorkretsen, i tillegg øker dette startmomentet;
- frekvens - endring i rotasjonshastigheten til HELL ved å endre frekvensen til strømmen i forsyningsnettet, noe som medfører en endring i rotasjonsfrekvensen til statorfeltet. Motoren slås på via frekvensomformer;
- bytte viklingene fra "stjerne"-kretsen til "trekant"-kretsen i ferd med å starte motoren, noe som reduserer startstrømmene i viklingene med omtrent tre ganger, men samtidig reduseres dreiemomentet også;
- pulsert - ved å levere en spesiell type forsyningsspenning (for eksempel sagtann);
- innføring av ytterligere emf i henhold til eller motsatt av slipfrekvensen i sekundærkretsen;
- endring i antall polpar, hvis slik svitsjing er gitt konstruktivt (kun for kortslutningsrotorer);
- ved å endre amplituden til forsyningsspenningen, når bare amplituden (eller den effektive verdien) til styrespenningen endres. Da forblir kontroll- og eksitasjonsspenningsvektorene vinkelrette (autotransformatorstart);
- amplitude-fase metode inkluderer to metoder beskrevet;
- inkludering i kraftkretsen til reaktorstatoren;
Notater
se også
- Veshenevsky S. N. Karakteristikk av motorer i en elektrisk stasjon. Utgave 6, revidert. Moskva, Energia Publishing House, 1977. Opplag 40 000 eksemplarer. UDC 62-83:621,313.2
Linker
- Enheten og prinsippet for drift av asynkrone elektriske motorer
- Gaidullin Alexander "Montering av en asynkronmotor 4A200"
- Asynkron elektrisk motor av trefasestrøm M. O. Dolivo-Dobrovolsky
| |||||||||||
Enheten til en asynkron maskin. Den stasjonære delen av en AC-maskin kalles statoren, og den bevegelige delen er
rotor. Stator- og rotorkjernene til asynkrone maskiner er satt sammen av plater av elektrisk stål (fig. 19-1), som vanligvis er belagt på begge sider med en olje-kolofoniumisolerende lakk før montering. Kjernene til maskiner med lav effekt er noen ganger satt sammen av unlakkerte plater, siden i dette tilfellet er et naturlig eller kunstig skapt lag av oksider på overflaten av stålplatene tilstrekkelig isolasjon.
På fig. Figur 19-2 er et eksplodert riss av en liten kraftinduksjonsmotor som viser statoren, rotoren og endeskjoldene. På fig. 19-3 er en tegning av en middels effekt induksjonsmotor.
Ris. 19-1. Statorkjerneplater (1) og rotor (2) til en asynkron maskin med liten og middels kraft
Statorkjernen er festet i huset, og rotorkjernen - på skaftet^ (maskiner med lav og middels kraft) eller på en felg med en tapp og en hylse satt på akselen (høyeffektsmaskiner) Rotorakselen roterer i lagre som er plassert i lagerskjold festet til statorhuset (maskin kovy "stabler" 11 М0ШН0Стиi) "eller på stykkemonterte lagre
På den indre sylindriske overflaten av statoren og på den ytre sylindriske overflaten av rotoren er det spor,

Ris. 19-2. Bilde av en asynkron motor med en ekorn-burrotor type A71-6 med en effekt på 14 ket demontert
hvor lederne til statoren og rotorviklingene er plassert. Statorviklingen er vanligvis trefaset (se kap. 21); er koblet til et trefaset strømnett og kalles derfor også primærviklingen. Rotorviklingen kan også lages trefaset tilsvarende statorviklingen. Endene av fasene til en slik rotorvikling er vanligvis koblet til en stjerne, og begynnelsen bringes ut ved hjelp av sleperinger og metall-grafittbørster (fig. 19-3). En slik asynkronmaskin kalles en sårrotormaskin. En trefase start- eller justeringsreostat er vanligvis koblet til sleperingene. Rotorens fasevikling utføres med samme antall magnetfeltpoler som statoren.
En annen type rotorvikling er en vikling i form av et ekornbur (fig. 19-4). I dette tilfellet, i hvert spor er det en kobber- eller aluminiumstang og endene på alle stengene
fra begge ender av rotoren er forbundet med kobber- eller aluminiumringer, som kortslutter stengene. Stengene er vanligvis ikke isolert fra kjernen. I maskiner opp til 1QG k&p stenger og ringer, sammen med vinger for ventilasjon, lages vanligvis ved å helle aluminium inn i rotoren
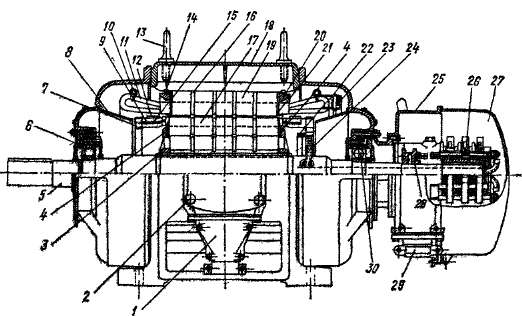
Figur 19-3 180 Tre-faset viklet rotor induksjonsmotor ket,
975 rpm
1 - kabelboks, 2 - uttaksboks på endene av statorviklingen, 3 - ringdybler for feste av rotorkjernen, 4 - høytrykksvaskere av rotorkjernen, 5 - rotoraksel, 6 og 30 - kule- og rullelager, 7 - kobberforbindelseskrager til rotorviklingsstengene, 8 -^ diffusorer for å lede den innkommende kjøleluften gjennom foringsskjermene, 9 - viklingsstenger^ på rotoren, "10 - festeringer, // - statorvikling, 12 - trådbandasjer! rotor, 13 - løfteringer, /* - lysbuetøkler, 15 - ringisolerende pakninger, 16 - radielle ventilasjonskanaler, 17 - rotorkjerne, ER->j støpt statorhus, 19 - statorkjerne, 20 og 21 - trykkputer og statorkjernering, 22 - en ring for å koble endene av rotorviklingen til en stjerne, 23 - «intercoil og intergruppeforbindelser til statorviklingen, 34 - konklusjoner av coc* tsov av rotorens vikling til sleperinger,. 25 og 27 - boks og hette av glideringer, 26 - kontakt ringer, 28 - bevegelig hylse med kontakter for lukket^. rotorens viklingsledninger er kortsluttet, 29 - kobling for utgang av rotra viklingskond
til ekstern krets
(Se fig. J9-2). En slik asynkron maskin kalles en ekorn-burmaskin. De fleste chrono-maskiner, spesielt små og mellomstore maskiner, kommer med en kortsluttet gpTopOM.
Luftgapet mellom statoren og rotoren i asynkrone maskiner er minst mulig med tanke på produksjon og driftssikkerhet, og jo større jo større er maskinen. I maskiner med en effekt på flere kilowatt, gapet
er 0,4-0,5 mm, og i maskiner med høy effekt - noen få millimeter.
Asynkrone maskiner er vanligvis luftkjølte. Ventilasjonsanleggene er i prinsippet de samme som for DC-maskiner (se § 8-5).
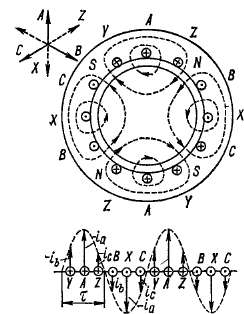
Roterende magnetfelt. På fig. 19-5 er tverrsnitt av en bipolar (2 s- 2) en induksjonsmotor og viser arten av statormagnetfeltet for to tidspunkter.
På fig. 19-5 viser den enkleste statorviklingen, når hver fase består av en omdreining eller to ledere (1. fase - ledere MEN og x, 2. fase - ledere PÅ og Y, 3. fase - ledere FRA og Z) 1. Lederne til hver sving (fase) er plassert - fra hverandre i en avstand til poldeling
hvor D a- diameteren til statorens indre boring, ar - antall polpar.
På fig. 19-5 poldeling gjør en lukket svingete ro-halvdel av en sirkel. Pitch av spole eller oppruller i form av et ekorn på er derfor komplett (på= t). To celler
360° el. Start av faser A, B, C forskjøvet i forhold til hverandre med 120 ° el., som i dette tilfellet er en tredjedel av sirkelen.
På fig. 19-5, en retningene til strømmer i lederne til statorviklingen er vist for tidspunktet når jeg sikter og jeg b= i c =
- - *)t- Fasestrømmer i fig. 19-5 anses som positive når
de er i begynnelsen av fasene (ledere A, B, C) rettet utover tegningens plan. På fig. 19-5, b retningene til strømmene vises for tidspunktet når fasene til strømmene har endret seg med 30° og
Fra fig. 19-5 kan man se at fordelingen av strømmer rundt omkretsen av statoren er to soner, hver med en verdi på m, og retningen er
1 I henhold til GOST 183-66 er begynnelsen av fasene til statorviklingene betegnet C 1 (C 2, Fra 3, deres ender - henholdsvis C 4, C 8, C g og begynnelsen av fasene til rotorviklingene - Pi, P 2 > ^z-I denne boken, for metodologiske formål, er begynnelsen på trefaseviklinger angitt overalt A, B, C eller en, b, c, og endene - henholdsvis L, Y, Z eller x, y, g.
![]()
strømmene i disse sonene er motsatte. Nederst på fig. 19-5 viser strømfordelingskurvene langs den utplasserte statoren.
Fra disse kurvene kan man se at strømmene er fordelt på overflaten av statoren i henhold til en sinusformet lov.
Strømmene til lederne til statorviklingen til en to-polet maskin skapes, som følger av fig. 19-5, bipolar magnetisk fluks
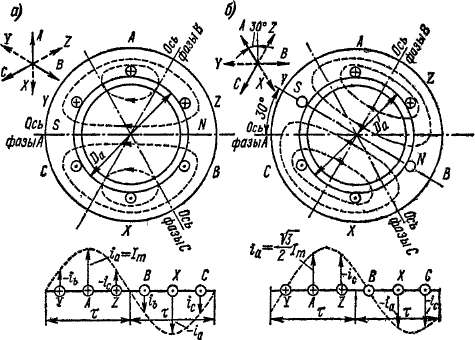
Ris. 19-5. Den enkleste statorviklingen til en asynkron maskin med 2p = 2 og dens magnetfelt
Ф 1 (passer gjennom statoren, rotoren og luftspalten mellom dem. Fra sammenligningen av fig. 19-5, ai b Det kan sees at når strømmenes fase endres med 30°, roterer strømfordelingskurven og den magnetiske fluksen i retning av fasene også med 30° el.
Aksen til fasens sving (vikling). MEN i fig. 19-5 er rettet horisontalt, og den magnetiske fluksaksen mot i a = lm(Fig. 19-5, a) er også rettet horisontalt. Det er klart at hvis strømmenes fase sammenlignet med fig. 19-5, en vil endres med 120° og vil derfor være det jeg b \u003d jeg er , da vil den magnetiske fluksen rettes langs faseaksen PÅ, dvs. den vil snu 120° el. På det tidspunktet da jeg c- Jeg er , aksen til den magnetiske fluksen sammenfaller med aksen til fase C, etc.
Dermed skaper statorviklingen til en topolet maskin, når den drives av en trefasestrøm, et topolet roterende magnetfelt.
I dette tilfellet, for en periode med strømendring, roterer feltet med 2 tonn eller 360 ° el.
Feltrotasjonshastighet
n i - t rpm,
hvor fi er statorstrømfrekvensen.
Magnetfeltet roterer i retning av fasesekvensen A, B, C statorviklinger. For å endre feltets rotasjonsretning til motsatt, er det nok å bytte plass på viklingens klemmer På ki statorender av to ledere som kommer fra strømnettet.
Med 2p \u003d 4 er poldelingen en fjerdedel av en sirkel og hver fase av den enkleste trefase statorviklingen (fig. 19-6) består av to svinger med et trinn y = x, som er forskjøvet i forhold til hverandre med 2 m og kan kobles til hverandre i serie eller parallelt. Individuelle faser og deres begynnelse A, B, C mens de også er forskjøvet i forhold til hverandre med 120 ° el. eller i dette tilfellet 1/6 av sirkelen. Fra fig. 19-6 kan man se at en slik vikling skaper en strømfordelingskurve og et magnetfelt med 2p \u003d 4. Dette feltet er også roterende og for en
strømmens periode roterer også med 2m, eller i dette tilfellet med en halv sirkel, som et resultat av at felthastigheten
p g = y, obIsec.
I det generelle tilfellet er det mulig å lage en vikling med 2p = 6, 8, 10 osv. I dette tilfellet vil en strømfordelingskurve og et magnetfelt med p polpar fås. Magnetfeltet roterer med en hastighet
Ris. 19-6. Den enkleste viklingen
stator til en asynkron maskin med
2p - 4 og dets magnetiske felt

Lineær perifer rotasjonshastighet av feltet langs omkretsen av statoren
Ved standard industriell strømfrekvens i USSR / = 50 Hz rotasjonshastighetene til feltet oppnås, angitt i tabell. 19-1.
Tabell 19-1
Rotasjonshastigheten til magnetfeltet til viklinger med forskjellig antall polpar R ved L = 50 Hz
| R | ||||||||||
| Px, R/MUH |
Ved utforming av vekselstrømsviklinger tilstreber de (se kap. 21) at fordelingen av induksjonen av rotasjonsfeltet i luftspalten langs omkretsen er så nær sinusformet som mulig.
Senere i dette kapittelet vil det antas at denne fordelingen er sinusformet.
Prinsippet for drift av en asynkron maskin. Den magnetiske fluksen Ф 1 (skapt av statorviklingen (fig. 19-5 og 19-6), under sin rotasjon, krysser lederne til rotorviklingen, induserer emf i dem. e p, og hvis rotorviklingen er lukket, oppstår strømmer i den c, frekvensen som f 2 med en stasjonær rotor (i \u003d 0) er lik primærfrekvensen f t.
Hvis rotorviklingen er trefaset, induseres en trefasestrøm i den. Denne strømmen skaper en roterende fluks av rotoren F 2, antall poler 2 p, hvis rotasjonsretning og hastighet kl. n = 0
samme som statorfluksen. Derfor flyter F g og F a roterer synkront og danner en felles roterende strøm av motoren F. Med en ekorn-burrotor induseres et flerfasesystem av strømmer % i sine stenger med en faseforskyvning i tilstøtende stenger med en vinkel
![]()

der Z 2 er antall rotorstenger. Disse strømmene skaper også en roterende fluks Ф 2, hvor antall poler, hvis rotasjonsretning og hastighet er den samme som faserotorfluksen. Derfor dannes det i dette tilfellet også en felles magnetisk fluks F i motoren. Med tanke på eksistensen av et felles roterende magnetfelt kan man vurdere f.eks. d.s., indusert i viklingene av dette feltet.
Som et resultat av samspillet mellom rotorstrømmene og strømmen, oppstår mekaniske krefter som virker på rotorens ledere F og roterende elektromagnetisk moment M.
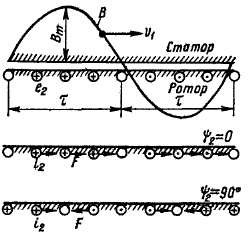
Øverst på fig. 19-7 viser en sinusformet bølge av det generelle magnetfeltet som roterer med en hastighet i>i PÅ maskiner og veibeskrivelse e. d.s. e 2 indusert av dette feltet i stengene til en fast ekorn-burrotor. Nederst på fig. 19-7 viser retningene til strømmene til stengene, c og kreftene som virker på dem F for to tilfeller: når faseforskyvningsvinkelen "fa mellom e, og r 2 er null og når ■ph 2 \u003d 90, At% \u003d 0, virker alle krefter i retning av rotasjonsfeltet. Derfor er dreiemomentet
Figur 19-7. Strømmer i stengene til rotorviklingen og kreftene som virker på dem
er forskjellig fra null og virker også i feltrotasjonsretningen. Samtidig, ved t | e a \u003d 90 °, virker kreftene i forskjellige sider
og M= 0.
Det følger at dreiemomentet bare skapes av den aktive komponenten av rotorstrømmen
Denne konklusjonen er av generell karakter og gjelder også for andre typer AC-maskiner.
Rotorkretsen til en asynkronmotor har alltid en viss aktiv motstand, og derfor når motoren startes (n = 0) alltid 0< t|) 2 < 90°. В результате развиваемый момент M> Q, og hvis det er større enn det statiske bremsemomentet på akselen, vil motorrotoren begynne å rotere i feltets rotasjonsretning med en viss hastighet P<; p b dvs. den vil rotere med noe etterslep, eller skli, i forhold til statorfeltet,
![]()
![]()
Relativ forskjell mellom rotasjonshastighetene til feltet og rotoren

kalt slip. Slippen er også uttrykt i prosent:
Rotorhastighet P, uttrykt i form av slip s, i henhold til formel (19-6), er lik
Når du starter motoren (S= 0) vi har s = 1, og når rotoren roterer synkront med statorfeltet eller, som de sier, med synkron hastighet (S= p d) vil være s = O. Når n = n x magnetfeltet til statoren i forhold til rotoren er stasjonært og strømmene i rotoren vil ikke bli indusert, derfor M= 0 og motoren kan ikke nå en slik rotasjonshastighet. Som et resultat er den alltid 0 i motormodus< /г <п х og l>s>0.
Når rotoren roterer mot feltet, er frekvensen for å krysse rotorlederne av feltet proporsjonal med hastighetsforskjellen tii- P og frekvensen av strømmen i rotorviklingen
Erstatter verdien her P fra formelen (19-7) og deretter verdien n x fra (19-2), får vi
dvs. sekundærfrekvensen er proporsjonal med slipingen.
Ved gjeldende frekvens / 2< f t rotasjonshastigheten til rotorfeltet i forhold til selve rotoren n 2p er også mindre p g og basert på uttrykket (19-9)
Rotasjonshastigheten til rotorfeltet i forhold til statoren i samsvar med uttrykk (19-7) og (19-10)
dvs. rotasjonshastigheten til rotorfeltet i forhold til statoren ved enhver rotasjonshastighet for rotoren P lik rotasjonshastigheten til statorfeltet p x. Derfor roterer også feltene til statoren og rotoren med en roterende rotor alltid synkront og danner et felles rotasjonsfelt.
Merk at vist i fig. 19-7 bildet av retningene til strømmer og mekaniske krefter er også gyldig når rotoren roterer, når 0< P< n x(motormodus).
Hvis rotoren til en asynkron maskin ved hjelp av en ekstern kraft (dreiemoment) bringes til rotasjon i rotasjonsretningen til statorfeltet med en hastighet høyere enn synkron (S> n d), da vil rotoren overta feltet og retningene til strømmene indusert i rotorviklingen sammenlignet med de som er vist i fig. 19-7 er snudd. I dette tilfellet blir også retningene til elektromagnetiske krefter reversert F og elektromagnetisk moment M.Øyeblikk M i dette tilfellet vil det bremse, og maskinen vil fungere i generatormodus og gi aktiv kraft til nettverket. I følge uttrykk (19-6), i generatormodus s< 0.
Hvis rotoren roteres i motsatt retning av rotasjonsretningen til statorfeltet (S< 0), то указанные на рис. 19-7 направления е 2 , / 2 и F er lagret. Elektromagnetisk moment M vil virke i rotasjonsretningen til statorfeltet, men vil bremse rotorens rotasjon. Denne driftsmodusen til en asynkron maskin kalles mot-inkluderingsmodus eller elektromagnetisk bremsemodus. I denne modusen, i samsvar med uttrykket (19-6) s> 1.
Driftsmåtene til en asynkron maskin diskuteres mer detaljert i neste avsnitt. Her skal det imidlertid bemerkes at forholdet (19-11), som det er lett å se, er bevart i enhver driftsmodus, for enhver verdi av s, dvs. feltene til statoren og rotoren roterer synkront i hvilken som helst driftsmåte for den asynkrone maskinen.
En asynkronmaskin er en børsteløs AC-maskin hvor et roterende magnetfelt eksiteres under drift, men rotoren roterer asynkront, dvs. med en vinkelhastighet som er forskjellig fra feltets vinkelhastighet.
Induksjonsmotorer er den vanligste av alle motorer. Fordelene deres ligger i enhetens enkelhet, høy pålitelighet og relativt lave kostnader.
Trefase asynkronmotorer foreslått av M.O. Dolivo-Dobrovolsky i 1888. De utføres med en effekt fra brøkdeler av en watt til tusenvis av kilowatt, med en rotasjonsfrekvens på 500 til 3000 rpm og en spenning på opptil 10 kV. Enfase asynkronmotorer brukes til å drive husholdningsapparater, elektroverktøy, i automasjonskretser. De drives av en enfasekrets og har en effekt, som regel, ikke høyere enn 0,5 kW.
Asynkrone maskiner kan operere i generatormodus. Men som kilder til elektrisk energi brukes de nesten aldri, siden de ikke har sin egen kilde til eksitasjon av magnetisk fluks og er dårligere enn synkrone generatorer når det gjelder ytelse.
Asynkrone maskiner brukes som spenningsregulatorer, faseregulatorer, frekvensomformere, etc.
Ulempene med asynkrone maskiner er kompleksiteten og uøkonomisk regulering av ytelsen.
En asynkronmotor består av en stator, en rotor og endeskjold. Statoren, den faste delen av motoren, er sylindrisk i form. Den består av en kropp, en kjerne og en vikling. Kroppen er støpt stål eller støpejern. Statorens magnetiske krets er satt sammen av tynne plater av elektrisk stål. På den indre overflaten har den spor som statorviklingen passer inn i. Rotoren til en induksjonsmotor - den roterende delen - består av en stålaksel, en magnetisk krets laget av plater av elektrisk stål med stemplede spor. Rotorviklingen kan være kortsluttet eller fase. Den kortsluttede viklingen er laget av aluminium eller kobberstenger som er kortsluttet i begge ender av rotoren. Faserotoren har en trefaset vikling koblet til en stjerne. Viklingsledningene er koblet til ringene på akselen og kobles til en reostat eller annen enhet ved hjelp av børster. Den roterende rotoren er plassert på en felles aksel med statoren. Akselen roterer i lagerskjold. Tilkoblingen av statorviklingen utføres i en boks hvor begynnelsen av fasene C 1, C 2, C 3 og endene av fasene C 4, C 5, C 6 bringes ut. På fig. viser utformingen av disse konklusjonene (a) og måter å koble dem til hverandre på når faseviklingene kobles til en stjerne (b) og en trekant (c).
Hvis to spenninger er angitt i motorpasset, for eksempel 380/220, tilsvarer en stjerneforbindelse en høyere spenning, en trekantforbindelse til en mindre. I begge tilfeller er motorfasespenningen 220 V.
Trefase statorviklingen skaper et magnetfelt som roterer med en hastighet 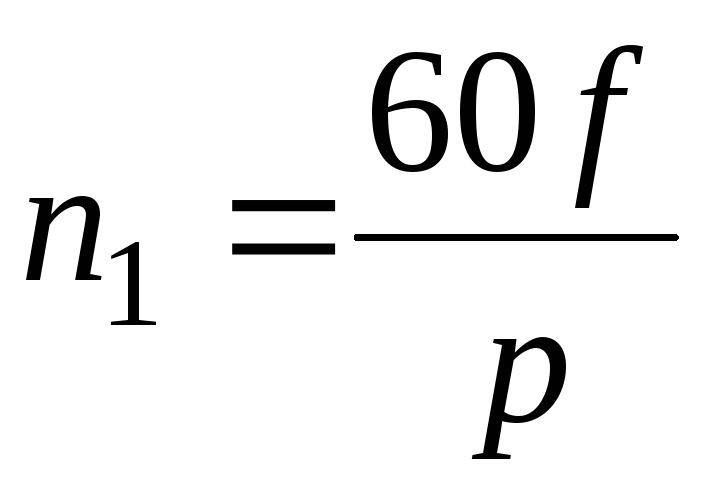 .
.
Elektromagnetisk interaksjon mellom statoren og rotoren oppstår bare når hastigheten til statorfeltet og rotasjonshastigheten til rotoren ikke er like.
Roterende magnetfelt til statoren til en asynkron maskin. Rotasjonsfrekvens for statorfeltet, slip (Kenskaper).
Grunnlaget for handlingen til en induksjonsmotor er et roterende magnetfelt. Prinsippet for å oppnå et roterende magnetfelt er at hvis faseforskyvede strømmer flyter gjennom et system av ledere fordelt i rommet langs en sirkel, så skapes et roterende felt i rommet.
R 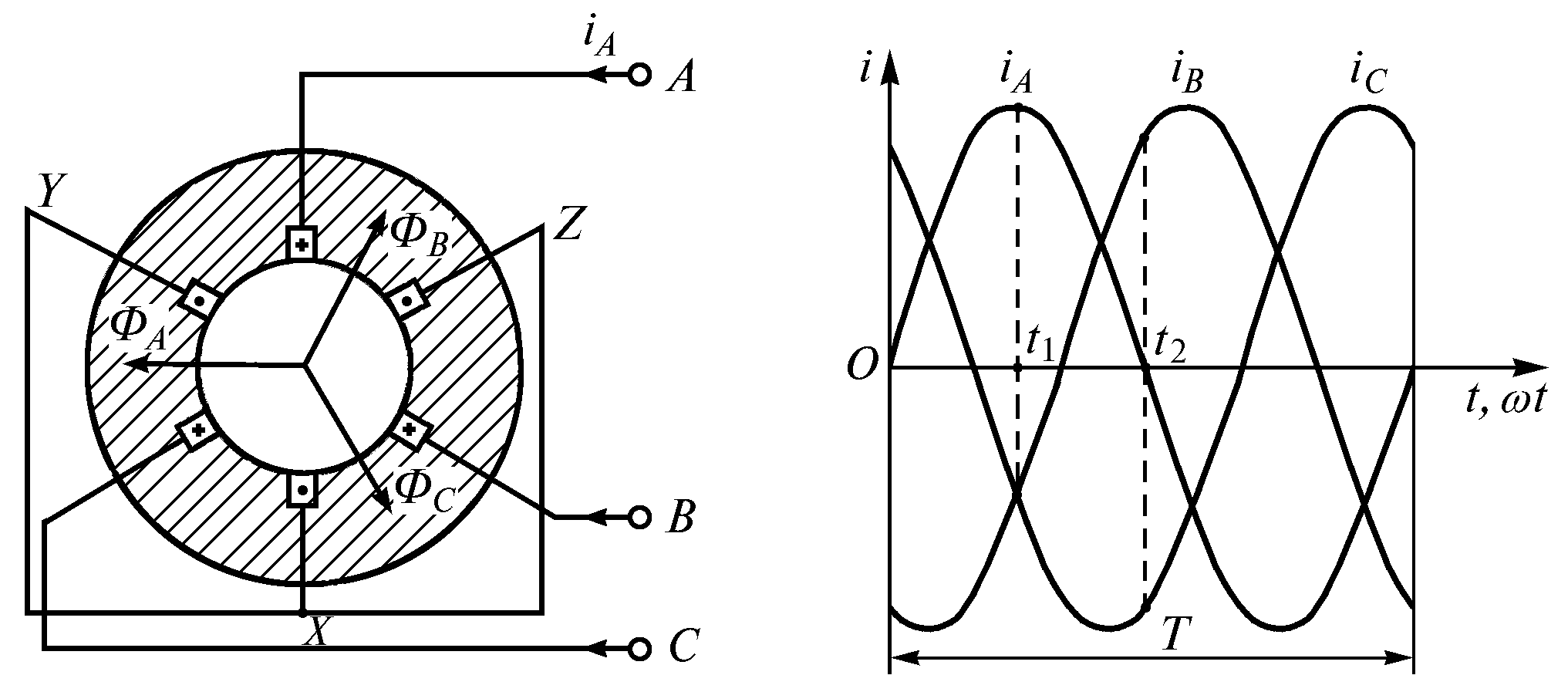 Vurder å skaffe et roterende felt i en trefasemotor. På fig. 1 viser trefaseviklinger EN–
X,
B
– Y,
C
– Z, hver i form av en enkelt spole. Et trefasesystem av strømmer leveres fra strømkilden til viklingene
Vurder å skaffe et roterende felt i en trefasemotor. På fig. 1 viser trefaseviklinger EN–
X,
B
– Y,
C
– Z, hver i form av en enkelt spole. Et trefasesystem av strømmer leveres fra strømkilden til viklingene  ;
;![]() ;
; .
.
Hvis fasene til statorviklingen er koblet til en 3-faset nettstrøm, oppstår strømmer som skaper et magnetfelt med induksjon:  ;
; ;. Komponenten av feltinduksjonen langs X-aksen er lik den algebraiske summen av projeksjonene på denne aksen av de øyeblikkelige verdiene til induksjonene til individuelle faser, dvs.
;. Komponenten av feltinduksjonen langs X-aksen er lik den algebraiske summen av projeksjonene på denne aksen av de øyeblikkelige verdiene til induksjonene til individuelle faser, dvs.
 . Tilsvarende finner vi projeksjonen på Y-aksen.
. Tilsvarende finner vi projeksjonen på Y-aksen.  . Som et resultat er den magnetiske induksjonen av statorfeltet lik:
. Som et resultat er den magnetiske induksjonen av statorfeltet lik:
Magnetfeltinduksjonen er konstant, og selve statorfeltet har projeksjoner på henholdsvis X- og Y-aksene: 
V- eller induksjon av skjærefeltet er plassert i en vinkel til y-aksen 
 ,
,
 , der T er perioden for gjeldende endring,
, der T er perioden for gjeldende endring,  -syklisk frekvens
-syklisk frekvens
På denne måten, trefase vikling, matet av strømmer forskjøvet med 120°, skaper et roterende magnetfelt. Den resulterende strømmen forblir uendret og er lik 1,5 av fasens maksimale strømning. Retningen til denne fluksen faller alltid sammen med retningen til den magnetiske fluksen til fasen der strømmen er maksimal i det gitte øyeblikket. Derfor, for å endre rotasjonsretningen, er det nødvendig å bytte to faser.
Eksemplene som vurderes refererer til en to-polet viklingsdesign () ved en feltrotasjonsfrekvens. I det generelle tilfellet er rotasjonsfrekvensen til feltet, hvor er antall polpar på maskinen; er frekvensen til statorstrømmen.
Verdi eller  kalt skyve asynkron maskin, hvor
kalt skyve asynkron maskin, hvor  - rotasjonsfrekvens for statorfeltet,
- rotasjonsfrekvens for statorfeltet,  - frekvens for rotasjon av rotoren.
- frekvens for rotasjon av rotoren.
Avhengig av forholdet og det er tre driftsmoduser: i motormodus; i generatormodus; i elektromagnetisk bremsemodus.
Arbeid i motormodus. De elektromagnetiske kreftene i samspillet mellom de magnetiske feltene til statoren og rotoren skaper et dreiemoment i rotasjonsretningen til statorfeltet. Hastigheten som motoren roterer med avhenger av belastningen. Ved tomgang blir hastigheten nesten lik, siden ved = 0 er EMF og strømmene i rotoren null og den elektromagnetiske interaksjonen forsvinner. Dermed opererer den asynkrone maskinen i motormodus innenfor området fra = 0 til, dvs. når du skyver fra +1 til 0. I dette tilfellet blir den elektriske energien som tilføres statoren fra nettverket omdannet til mekanisk energi på akselen.
Arbeid i generatormodus. La oss anta at statoren koblet til nettverket skaper et roterende magnetfelt, og rotoren drives i samme retning med en hastighet. I dette tilfellet vil slipingen være negativ, og EMF- og rotorstrømmene vil endre retning sammenlignet med driften i motormodus. Dreiemomentet på akselen blir bremsing i forhold til momentet til drivmotoren. En asynkron maskin fungerer som en generator. Den mekaniske energien som tilføres sjakten omdannes til elektrisk energi og overføres til nettverket. Dermed kan en asynkron maskin operere i generatormodus parallelt med nettverket innenfor grensene for otdo, dvs. når du glir av  før.
før.
Arbeid i elektromagnetisk bremsemodus. La oss anta at rotoren drives mot rotasjonsretningen til statorens magnetiske fluks. I dette tilfellet tilføres energi til den asynkrone maskinen fra to sider - elektrisk fra nettverket og mekanisk fra drivmotoren. Denne driftsmodusen kalles elektromagnetisk bremsemodus. Det oppstår når du glir fra til.
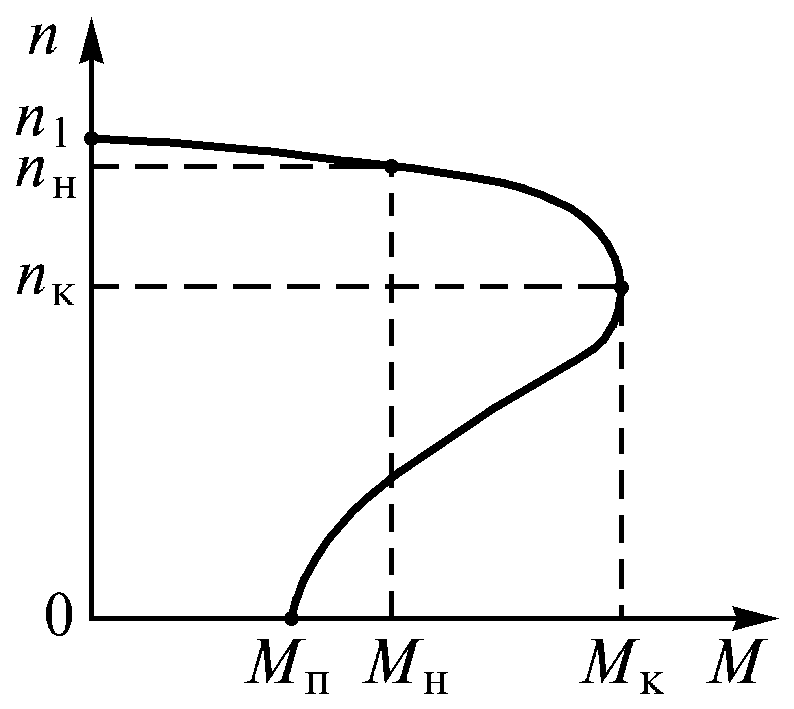
 - maksimalt dreiemoment
- maksimalt dreiemoment
 - Startmoment
- Startmoment
 - nominelt øyeblikk
- nominelt øyeblikk
Den mekaniske egenskapen til motoren er avhengigheten av rotorhastigheten på dreiemomentet på akselen. Siden tomgangsmomentet er lite under belastning, er den mekaniske karakteristikken representert av en avhengighet. Hvis vi tar forholdet i betraktning, da mekaniske egenskaper kan oppnås ved å presentere dens grafiske avhengighet i koordinater
En asynkron maskin har en stator og rotor atskilt med en luftspalte. Dens aktive deler er viklinger og en magnetisk krets (kjerne); alle andre deler er strukturelle, gir nødvendig styrke, stivhet, kjøling, mulighet for rotasjon, etc.
Statorviklingen er en trefaset (generelt flerfaset) vikling, hvis ledere er jevnt fordelt rundt omkretsen av statoren og lagt fase for fase i spor med en vinkelavstand på 120 °. Fasene til statorviklingen er koblet i henhold til standard "trekant" eller "stjerne" -skjemaer og koblet til et trefaset strømnettverk. Den magnetiske statorkretsen remagnetiseres i prosessen med å endre strømmen i statorviklingen, så den rekrutteres fra elektriske stålplater for å sikre minimale magnetiske tap. Hovedmetoden for å sette sammen den magnetiske kretsen til en pakke er blanding.
I henhold til utformingen av rotoren er asynkrone maskiner delt inn i to hovedtyper: med kortsluttet rotor og fase rotor. Begge typer har samme statordesign og skiller seg bare i utformingen av rotorviklingen. Den magnetiske rotorkretsen er laget på samme måte som statormagnetkretsen - fra elektriske stålplater.
asynkron maskin- en elektrisk vekselstrømsmaskin, hvis rotorhastighet ikke er lik (i motormodus mindre) med rotasjonsfrekvensen til magnetfeltet skapt av strømmen til statorviklingen.
I en rekke land er kommutatormaskiner også klassifisert som asynkrone maskiner. Et annet navn for asynkrone maskiner er induksjon på grunn av at strømmen i rotorviklingen induseres av statorens rotasjonsfelt. Asynkrone maskiner utgjør i dag størstedelen av elektriske maskiner. De brukes hovedsakelig som elektriske motorer og er de viktigste omdannere av elektrisk energi til mekanisk energi, og brukes hovedsakelig asynkrone motorer med en ekorn-burrotor (ADKZ).
Fordeler (for ADKZ):
- Enkel produksjon.
- Relativ billighet.
- Høy driftssikkerhet.
- Lave driftskostnader.
- Mulighet for å koble til nettverket uten omformere (for laster som ikke trenger hastighetskontroll).
Alle de ovennevnte fordelene er en konsekvens av fraværet av mekaniske kommutatorer i rotorkretsen og har ført til at de fleste av de elektriske motorene som brukes i industrien er asynkrone maskiner, utført av ADKZ.
Feil:
- Lite startøyeblikk.
- Betydelig startstrøm.
- Lav effektfaktor.
- Kompleksiteten til hastighetskontroll med nødvendig nøyaktighet.
- Maksimal motorhastighet er begrenset av nettfrekvensen (for ADKZ drevet direkte fra trefaset nettverk 50 Hz er 3000 rpm).
- Sterk avhengighet (kvadratisk) av det elektromagnetiske dreiemomentet på forsyningsspenningen (når spenningen endres med 2 ganger, endres dreiemomentet med 4 ganger; i DCT-er avhenger dreiemomentet av ankerforsyningsspenningen til første grad, noe som er mer gunstig) .
Den mest perfekte tilnærmingen for å eliminere de ovennevnte ulempene er å drive motoren gjennom en frekvensomformer, der kontroll utføres i henhold til komplekse algoritmer.
Vi anbefaler deg å lese
, diagnose, behandling Behandling av urogenital klamydia") Urogenital klamydia - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia
Urogenital klamydia - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva
Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva Å vente eller ikke vente på en fyr fra hæren. Hvorfor kan de få oppdrag fra hæren
Å vente eller ikke vente på en fyr fra hæren. Hvorfor kan de få oppdrag fra hæren Bakte epler med cottage cheese Bakte epler med cottage cheese
Bakte epler med cottage cheese Bakte epler med cottage cheese

