Con una potenza da decine di watt a diversi kilowatt, sono ampiamente utilizzati in vari elettrodomestici, azionamenti di ventilatori per scopi domestici e industriali, macchine per la lavorazione del legno, pompe, compressori, nastri trasportatori e piccole macchine. Il loro vantaggio è la possibilità di utilizzarli in luoghi e stanze dove non c'è rete trifase, ma è collegata una rete monofase a due fili.
Una parte significativa dei motori elettrici asincroni monofase viene prodotta sulla base di motori trifase seriali. ad esempio, i motori monofase della serie ABE sono realizzati sulla base di motori incorporati trifase AB, ecc. Non ci sono differenze significative nella progettazione della parte meccanica e dei circuiti magnetici di tali motori rispetto a motori elettrici asincroni di corrente trifase .
Condensatore el. motori
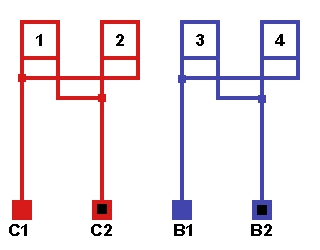
La principale differenza sta nella progettazione, nell'esecuzione e nel collegamento dell'avvolgimento dello statore. Per avviare motori elettrici asincroni monofase, viene spesso utilizzato uno speciale avvolgimento di avviamento, situato sullo statore insieme all'avvolgimento di lavoro principale, ma spostato di un certo angolo rispetto ad esso. Inizia ad avvolgere spesso connesso alla rete tramite condensatore, e dopo aver avviato e accelerato il motore, si spegne. In una serie di progetti, entrambi gli avvolgimenti funzionano e, al fine di aumentare l'efficienza d'uso e migliorare le caratteristiche dei motori monofase, è possibile lasciare l'avvolgimento di avviamento con condensatori inclusi nel suo circuito collegato alla rete per l'intero periodo di operazione. In questo caso, selezionando la capacità dei condensatori, nella modalità di funzionamento della macchina, una rotazione circolare o quasi circolare campo magnetico, quando la componente inversa del campo sarà completamente assente o sarà notevolmente indebolita. Di conseguenza, le prestazioni della macchina miglioreranno e aumenterà l'efficienza del suo utilizzo. Se al lavoro motore monofase entrambi i suoi avvolgimenti rimangono permanentemente collegati alla rete e un condensatore è collegato in serie con uno di essi, quindi viene chiamato tale motore condensatore(vedi fig.).
In un motore a condensatore, entrambi gli avvolgimenti funzionano. Dalla condizione per ottenere un campo circolare del loro numero di giri in caso generale diverso. La scelta di un condensatore può sembrare un compito arduo. Ci sono almeno due modi per farlo.
Il primo modo è selezionare empiricamente la capacità del condensatore. Criteri per valutare la scelta ottimale di capacità, corrente a vuoto e coppia di spunto. La coppia dovrebbe essere massima e la corrente a vuoto dovrebbe essere minima. Solitamente è sufficiente una stima della corrente a vuoto.
Il secondo modo per scegliere la capacità di un condensatore è il metodo di calcolo. Soffermiamoci su questo in modo più dettagliato. In questo caso, le tensioni sugli avvolgimenti devono essere sfasate di 90o, quindi
 jUa = Uβkwawa/kwβwβ. (1)
jUa = Uβkwawa/kwβwβ. (1)
Correnti di avvolgimento io e io sarà anche sfasato di 90° e creerà MDS
jIakwawa = Iβkwβwβ (2),
dove wa e wβ- numero di giri di avvolgimento α e β ;
kwa e kwβ coefficienti di avvolgimento per gli avvolgimenti α e β .
Moltiplicando i lati sinistro e destro delle uguaglianze (1) e (2), otteniamo
UαIα = UβIβ
Cioè, la potenza totale di entrambi gli avvolgimenti sarà uguale. Poiché gli avvolgimenti si trovano nelle stesse condizioni rispetto al rotore, anche le potenze attive da essi sviluppate saranno uguali, cioè
UαIαcosφα = UβIβcosφβ
da cui ne consegue φα = φβ .
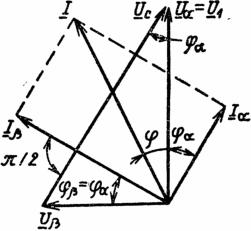
Inoltre, secondo la Fig.
Uα = U1 Uβ+Uñ = U1
e l'angolo di spostamento tra la corrente io e la tensione ai capi del condensatore Noiè 90°. Queste condizioni corrispondono al diagramma vettoriale. Secondo questo grafico
Us = Uβ /sinφβ
La capacità richiesta per creare un campo circolare è determinata dalla relazione
Iβ = Us /xc = (Uβ / sinφβ) ωC
Dove
C = Iβ sinφβ / (ωUβ)
La potenza del condensatore è
QC = Us Iβ = Uβ Iβ / sinφβ
Pertanto, la potenza del condensatore è uguale alla piena potenza del motore, cioè relativamente grande. Va notato che per un dato valore di capacità C il campo circolare viene creato solo ad uno specifico carico del motore (ad un valore di corrente). Ad altri carichi, il campo è ellittico e le prestazioni del motore sono ridotte. È possibile regolare la capacità con una variazione del carico, ma ciò complicherà il circuito del motore. Per ottenere un campo circolare all'avvio ea qualsiasi carico, i condensatori sono talvolta inclusi in due rami paralleli; sotto carico, un ramo funziona e all'avvio entrambi sono accesi. In motori a condensatore l'uso dei materiali è quasi uguale a quello di motore trifase uguale potenza, anche la loro efficienza è approssimativamente uguale e cosφ leggermente superiore per i motori a condensatore.
Per molti motori asincroni monofase, un condensatore aggiuntivo (di avviamento) è collegato al circuito dell'avvolgimento collegato alla rete tramite un condensatore per la durata dell'avviamento.
Principio di funzionamento e progettazione motore elettrico monofase.
Uno statore monofase standard ha due avvolgimenti a 90° l'uno rispetto all'altro. Uno di questi è considerato l'avvolgimento principale, l'altro - ausiliario o di avviamento. In base al numero di poli, ogni avvolgimento può essere suddiviso in più sezioni.
La figura mostra un esempio di un bipolare avvolgimento monofase con quattro sezioni nell'avvolgimento principale e due sezioni nell'ausiliario.
Limitazioni dei motori elettrici monofase.
DA Va ricordato che l'utilizzo di un motore elettrico monofase è sempre una sorta di compromesso. La progettazione dell'uno o dell'altro motore dipende, prima di tutto, dal compito da svolgere. Ciò significa che tutti i motori elettrici sono progettati in base a ciò che è più importante in ogni caso: ad esempio efficienza, coppia, duty cycle, ecc. A causa del campo pulsante, i motori monofase possono averne di più alto livello rumore rispetto ai motori bifase, che sono molto più silenziosi perché utilizzano un condensatore di avviamento. Il condensatore, attraverso il quale viene avviato il motore elettrico, contribuisce al suo buon funzionamento.
A differenza del trifase, ci sono alcune limitazioni per i motori elettrici monofase. In nessun caso i motori elettrici monofase dovrebbero funzionare al minimo, poiché si scaldano molto a bassi carichi, inoltre si sconsiglia di far funzionare il motore elettrico con un carico inferiore al 25% del pieno carico.
Email asincrone motori a poli schermati
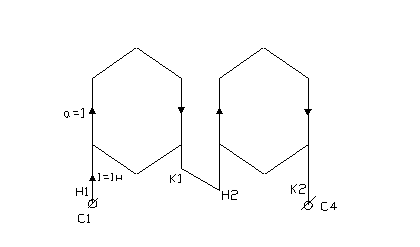
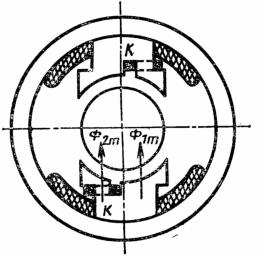 statore motore a induzione con poli schermati ha un design a polo saliente (vedi Fig.). Sui poli è posizionato un avvolgimento monofase, che è collegato rete monofase. Parte del polo copre una bobina K in cortocircuito. Il rotore del motore ha un avvolgimento convenzionale in cortocircuito a forma di gabbia di scoiattolo.
statore motore a induzione con poli schermati ha un design a polo saliente (vedi Fig.). Sui poli è posizionato un avvolgimento monofase, che è collegato rete monofase. Parte del polo copre una bobina K in cortocircuito. Il rotore del motore ha un avvolgimento convenzionale in cortocircuito a forma di gabbia di scoiattolo.
Il flusso magnetico di un polo del motore può essere rappresentato come due componenti. La parte del polo non coperta dalla bobina in cortocircuito penetra nel flusso Ф1m, creato dalla corrente dell'avvolgimento dello statore I1. L'altra parte del polo può essere considerata come un trasformatore, in cui avvolgimento primarioè l'avvolgimento dello statore e il secondario è una bobina in cortocircuito. Il flusso risultante di questa parte del polo Ф2m è uguale alla somma geometrica del flusso f"2m generato dalla corrente dell'avvolgimento dello statore I1, e flusso Фк,m dalla corrente Ik, indotto in una bobina cortocircuitata da un flusso f"2m.
 Come segue dal diagramma vettoriale (vedi Fig.), che è simile al diagramma vettoriale di un trasformatore, tra i flussi delle due parti del polo Ф1m e Ф2m a causa dell'azione schermante della bobina in cortocircuito, si ha uno sfasamento nel tempo di un angolo β
. Inoltre, gli assi di questi flussi sono spostati di un certo angolo nello spazio. Pertanto, il campo magnetico nella macchina ruoterà. Dal momento che i flussi magnetici Ф1m e Ф2m non sono uguali tra loro e l'angolo di spostamento tra di loro è inferiore a 90°, quindi il campo magnetico sarà ellittico. Di conseguenza, i motori con poli schermati presentano una serie di svantaggi: grandi dimensioni di ingombro, piccola coppia di spunto
, basso fattore di potenza (cos φ ≈ 0,4 ÷ 0,6) e bassa efficienza a causa di grandi perdite in una bobina in cortocircuito (ή ≈ 0,25 ÷ 0,4).
Come segue dal diagramma vettoriale (vedi Fig.), che è simile al diagramma vettoriale di un trasformatore, tra i flussi delle due parti del polo Ф1m e Ф2m a causa dell'azione schermante della bobina in cortocircuito, si ha uno sfasamento nel tempo di un angolo β
. Inoltre, gli assi di questi flussi sono spostati di un certo angolo nello spazio. Pertanto, il campo magnetico nella macchina ruoterà. Dal momento che i flussi magnetici Ф1m e Ф2m non sono uguali tra loro e l'angolo di spostamento tra di loro è inferiore a 90°, quindi il campo magnetico sarà ellittico. Di conseguenza, i motori con poli schermati presentano una serie di svantaggi: grandi dimensioni di ingombro, piccola coppia di spunto
, basso fattore di potenza (cos φ ≈ 0,4 ÷ 0,6) e bassa efficienza a causa di grandi perdite in una bobina in cortocircuito (ή ≈ 0,25 ÷ 0,4).
Qualche miglioramento nelle loro caratteristiche di avviamento e funzionamento può essere ottenuto utilizzando shunt magnetici in lamiera d'acciaio tra i poli, aumentando il traferro sotto la parte non schermata dei poli e posizionando due o tre spire cortocircuitate di larghezza diversa su ciascun polo. I motori con poli schermati sono disponibili in commercio da frazioni di watt a 300 W e sono utilizzati in ventilatori, lettori, registratori, ecc.
Formule per convertire un motore elettrico trifase in un condensatore monofase.

- Con questo ricalcolo di un motore elettrico trifase in uno monofase, il numero di rami paralleli non viene preso in considerazione, di conseguenza, il numero di rami paralleli negli avvolgimenti di lavoro e di avviamento è uguale al numero di paralleli rami nell'avvolgimento di un motore elettrico trifase.
Un esempio di conversione di un motore elettrico trifase in un condensatore monofase.
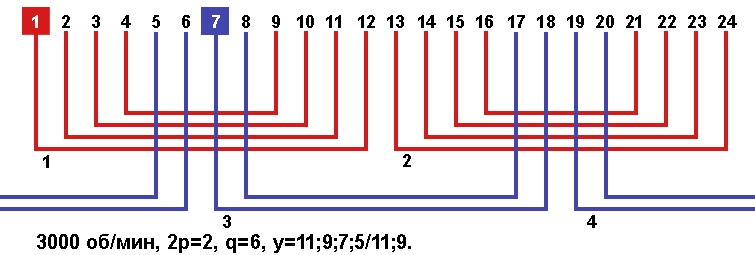
- Per un esempio di conversione di un condensatore trifase in un condensatore monofase, prendiamo un motore 5AI100S2U3 con una potenza di 4,0 kW. 3000 giri/min, tensione di alimentazione U=220/380, corrente A=14,6/8,15. Il motore elettrico ha i seguenti dati di avvolgimento: diametro filo d=0,8×2 (in due fili), spire nell'asola n=25, numero di rami paralleli a=1, passo di avvolgimento lungo le cave y=11;9, numero delle cave dello statore Z 1 =24.
- Per prima cosa è necessario calcolare lo schema di posa di un avvolgimento monofase, per un motore condensatore monofase è meglio scegliere uno schema di posa in cui l'avvolgimento di lavoro occupi 2/3 delle scanalature del nucleo dello statore e l'avviamento l'avvolgimento occupa 1/3 delle scanalature del nucleo dello statore Figura n. 1. Fase: lavorare l'avvolgimento y=11;9;7;5, iniziare l'avvolgimento y=11;9.

- Il ricalcolo di un motore elettrico trifase in un motore a condensatore monofase è completato. Si è scoperto un motore elettrico monofase con i seguenti dati di avvolgimento: avvolgimento di lavoro - il numero di giri nella scanalatura Nr=13, diametro del filo d=1,56; avvolgimento di partenza - numero di spire nell'asola Np=26, diametro del filo d=1,12, numero di rami paralleli negli avvolgimenti di lavoro e di partenza a=1.
- Per iniziare e operazione normale motore monofase, la rete di alimentazione deve sopportare la corrente di avviamento e la corrente a coppia di spunto sarà circa sette volte la corrente nell'avvolgimento di lavoro 15,6 × 7 \u003d 109,2 A. La tensione dei condensatori è di almeno 450 volt.
- Seleziona la capacità del lavoratore (Mer) e lanciatore (Sp) condensatori del motore al minimo (senza carico).
- Aumentando o diminuendo la capacità del condensatore, ottenere un buon avviamento del motore. Se il motore non si avvia (solitamente questo accade con i motori elettrici a 3000 giri/min), dovrai macinare tornio anelli del rotore in cortocircuito in alluminio. La sezione degli anelli di cortocircuito deve essere ridotta del 20-50%, aumentando così la resistenza del rotore e lo scorrimento. Solitamente, dopo aver aumentato la resistenza del rotore, il motore elettrico si avvia facilmente.
- Dopo che il motore si è avviato, misurare la corrente a vuoto nell'avvolgimento di lavoro del motore elettrico. Corrente a vuoto in monofase e trifase motori elettrici asincroni dipende dalla velocità di rotazione. Minore è la velocità del motore, più la corrente a vuoto è vicina alla corrente nominale del motore. Se la corrente a vuoto del motore elettrico a 3000 giri/min. circa il 40-60% della nominale, quindi la corrente a vuoto del motore elettrico a 250 giri/min. sarà di circa l'80-95%. corrente nominale indicato sul piatto. Poiché stiamo selezionando un condensatore di marcia per un motore monofase da 3000 giri/min, la corrente a vuoto dovrebbe essere il 40-60% della corrente massima nell'avvolgimento di lavoro. Dopo aver calcolato la corrente massima nell'avvolgimento di lavoro di un motore elettrico monofase è di 15,6 A, la corrente al minimo dovrebbe essere compresa tra 6 e 9 A.
- Cosa fare se il motore si avvia bene, ma la corrente nell'avvolgimento di lavoro al minimo è prossima o superiore a 15,6 A. Avviare il motore e, dopo l'accelerazione, scollegare alcuni condensatori, lasciare circa il 30-50% della capacità totale in operazione. Riducendo o aumentando la capacità del condensatore di lavoro, selezioniamo la corrente a vuoto di un motore elettrico monofase da 6 a 9 A. Il condensatore che rimane sempre nel circuito di avvolgimento di un motore elettrico monofase è chiamato a uno funzionante. (Mer), un condensatore utilizzato solo per avviare il motore elettrico - avviamento (Sp). Dopo aver installato il motore elettrico sull'apparecchiatura, è possibile effettuare la regolazione condensatore di avviamento nella direzione dell'aumento della capacità, la capacità del condensatore di lavoro non può essere modificata.
- La corrente a vuoto di un motore elettrico monofase è normale, la corrente in avvolgimento iniziale non deve superare 7,8 A.

Letteratura su questo argomento:
Devotchenko FS "Remake motori elettrici trifase a monofase con sostituzione avvolgimento." 1991
Kokorev AS "Manuale del giovane Wrapper macchine elettriche"1979
Meshcheryakov V.V., Chentsov I.M. "Ricalcolo di macchine elettriche e tabelle di dati di avvolgimento" 1950
introduzione
1. Assegnazione al progetto del corso
2. Preparazione dei dati di misurazione del nucleo magnetico
3. Scelta del tipo di avvolgimento
4. Calcolo dei dati di avvolgimento
5. Calcolo del numero ottimale di giri nell'avvolgimento di una fase
6. Calcolo del numero di giri in una sezione
7. Scelta dell'isolamento delle fessure e degli avvolgimenti terminali
8. Selezione del marchio e calcolo della sezione filo di avvolgimento
9. Calcolo delle dimensioni della sezione (lunghezza della bobina)
10. Calcolo della massa dell'avvolgimento
11. Resistenza elettrica avvolgimenti di una fase corrente continua freddo
12. Calcolo dei dati nominali
13. Compito per il wrapper
14. Calcolo di un avvolgimento a strato singolo
15. Ricalcolo di un motore asincrono per altri parametri
Letteratura
INTRODUZIONE
I motori asincroni sono i principali convertitori energia elettrica in meccanica e costituiscono la base dell'azionamento elettrico della maggior parte dei meccanismi utilizzati in tutti i settori dell'economia nazionale.
I motori asincroni consumano oltre il 40% dell'elettricità generata nella Repubblica di Bielorussia, la loro fabbricazione richiede una grande quantità di materiali scarsi: acciaio elettrico, rame per avvolgimenti, ecc., ma il costo della manutenzione delle apparecchiature installate è ridotto. Pertanto, la creazione di una serie di IM altamente economici e affidabili sono i compiti più importanti, e giusta scelta motori, il loro funzionamento e le riparazioni di alta qualità svolgono un ruolo nel risparmio di materiali e risorse di manodopera.
Motori asincroni scopo generale potenza da 0,06 a 400 kW con tensione fino a 1000 V - le macchine elettriche più utilizzate. Nel parco economico nazionale dei motori elettrici rappresentano il 90% in quantità e circa il 55% in termini di potenza. La necessità e, di conseguenza, la produzione di motori asincroni per tensioni fino a 1000 V in Bielorussia cresce di anno in anno.
La durata delle apparecchiature elettriche è piuttosto lunga (fino a 20 anni). Durante questo periodo, durante il funzionamento, alcuni elementi delle apparecchiature elettriche (isolamento) invecchiano, altri (cuscinetti) si consumano.
I processi di invecchiamento e usura disabilitano il motore elettrico. Questi processi dipendono da molti fattori: condizioni e modalità di funzionamento, Manutenzione eccetera. Uno dei motivi del guasto delle apparecchiature elettriche sono le modalità di emergenza: sovraccarico della parte di lavoro della macchina, corpi estranei che entrano nella macchina di lavoro, modalità di funzionamento in fase aperta, ecc. Il guasto dei motori elettrici, quando è impossibile sostituirli rapidamente, porta alla fermata delle linee di lavorazione dei prodotti e spesso a grandi perdite di materiale.
Le apparecchiature elettriche guaste vengono ripristinate. La particolarità della riparazione è che il motore viene calcolato prima della riparazione. Ciò è necessario per verificare che i dati disponibili sugli avvolgimenti del motore corrispondano ai dati di catalogo.
I dati ottenuti vengono confrontati con i dati di catalogo. Solo nel caso di una completa coincidenza di tutti i valori necessari e con piccole discrepanze tra di loro, è possibile iniziare a riparare il motore elettrico. La riparazione degli avvolgimenti, soprattutto durante l'ammodernamento, richiede una conoscenza abbastanza approfondita dei metodi di calcolo, la capacità di utilizzare razionalmente i materiali elettrici e di trovare le soluzioni più economiche.
1. ASSEGNAZIONE AL PROGETTO DEL CORSO.
Tabella 1. Dati iniziali per il progetto.
Dimensioni del circuito magnetico e della sua scanalatura:
D - Diametro interno del nucleo dello statore, mm.
D a - Diametro esterno del nucleo dello statore, mm.
l è la lunghezza totale del nucleo dello statore, mm.
Z - numero di scanalature, pz.
b - grande dimensione della larghezza della scanalatura, mm.
b" è la dimensione più piccola della larghezza della scanalatura, mm.
b w - larghezza della fessura della scanalatura, mm.
h è l'altezza totale della scanalatura, mm.
e è l'altezza della bocca della scanalatura, mm.
δ è lo spessore delle lamiere di acciaio, mm, e il tipo di isolamento è indicato in numeri.
Specifiche cliente:
n è la frequenza di rotazione del campo magnetico dello statore, min -1.
Uf - tensione di fase avvolgimenti dello statore,
U / Δ - schema di connessione dell'avvolgimento di fase, stella / triangolo.
f è la frequenza corrente, Hz.
Riso. 1. Schizzo del nucleo dello statore di un motore a induzione e del contorno della scanalatura.
2. PREPARAZIONE DEI DATI DI MISURA DEL CIRCUITO MAGNETICO
La preparazione dei dati di misurazione del circuito magnetico viene eseguita per comodità di eseguire calcoli successivi e include il calcolo di:
a) l'area del polo nel traferro (Q d),
b) l'area del polo nella zona dei denti dello statore (Q z),
c) area della sezione trasversale del dorso dello statore (Q c),
d) area libera della scanalatura (Q p), mm 2.
Le prime tre aree sono necessarie per calcolare i carichi magnetici, l'ultima per calcolare la sezione trasversale del filo dell'avvolgimento.
1. L'area del polo nel traferro.
Nel traferro, la resistenza al flusso magnetico su tutta l'area è uniforme:
(m2)dove l p è la lunghezza stimata del circuito magnetico, m
t - divisione dei poli
Non ci sono canali di raffreddamento
(mm)p è il numero di coppie di poli
(PCS)2. L'area del polo nella zona del dente.
Nella zona del dente dello statore, il flusso magnetico scorre attraverso lamiere di acciaio elettrico, pertanto l'area del polo sarà uguale al prodotto dell'area attiva del dente e del loro numero nel polo:
dove N z è il numero di denti per polo, pz
Q 1 z - area di un dente, m 2
(pz) (m 2)dove l a è la lunghezza attiva del dente
b z - larghezza media del dente
mdove Kz è il fattore di riempimento dell'acciaio, dipende dallo spessore della lamiera di acciaio elettrico e dal tipo di isolamento
b' z – dimensione del dente più piccola
b'' z – dimensione del dente maggiore
larghezza del dente nel punto stretto
3. L'area del circuito magnetico nella parte posteriore dello statore.
L'area della parte posteriore dello statore, perpendicolare al flusso magnetico, è uguale al prodotto della sua altezza e della lunghezza attiva del circuito magnetico:
(m2)dove h c è l'altezza del dorso dello statore
4. Area della scanalatura in chiaro.
L'area libera della scanalatura è necessaria per calcolare la sezione trasversale del filo dell'avvolgimento. Per determinare l'area della scanalatura, la sua sezione è divisa da linee assiali in semplici figure:
dove Qb, Qb' sono le aree dei semicerchi con diametri b e b', rispettivamente
Q t - dove le basi sono b e b ', e l'altezza:
3. SELEZIONE DEL TIPO DI AVVOLGIMENTO
La scelta avviene in base a:
Possibilità tecniche di avvolgimento in determinate condizioni;
Consumo minimo di filo per avvolgimento;
Potenza e tensione nominali;
tipo di scanalatura;
Vantaggi e svantaggi degli avvolgimenti;
fattibilità economica.
Lo schema degli avvolgimenti dello statore delle macchine elettriche trifase è suddiviso in:
In base al numero di lati attivi delle sezioni nella scanalatura, in monostrato (in cui il lato attivo di una bobina occupa l'intera scanalatura) e a doppio strato (il lato attivo occupa metà della scanalatura),
A seconda della dimensione del passo per avvolgimenti a passo pieno (a y=y') e a passo accorciato (a y Secondo la frequenza di rotazione del campo magnetico dello statore in velocità singola e multivelocità, In base al numero di sezioni nei gruppi di bobine (bobine di fase) per avvolgimenti con lo stesso numero di sezioni nel gruppo (q è un numero intero) e uguale a (q è un numero frazionario). A seconda del modo in cui vengono eseguiti gli avvolgimenti, si dividono anche in: Dima sciolta (o sciolta), sono anche detti avvolgimenti con sezioni morbide. Per tali avvolgimenti, le sezioni vengono posate un conduttore attraverso una fessura (fessura) di una scanalatura semichiusa. Viene utilizzato per macchine a bassa potenza, tensione fino a 500 V; Brocciatura, eseguita tirando il filo attraverso le scanalature, utilizzata per macchine con tensione fino a 10.000 V con scanalature chiuse o semichiuse. Il metodo di posa degli avvolgimenti è laborioso. Attualmente vengono utilizzati principalmente per la riparazione parziale degli avvolgimenti. Gli avvolgimenti con sezioni rigide, sezioni finite e isolate, che trasportano l'isolamento delle scanalature sulle parti attive, sono posizionate in scanalature aperte. Utilizzato per macchine di media e alta potenza con tensione fino a 5000 -10000 V e oltre. Secondo il metodo di posizionamento delle sezioni dei gruppi di bobine nel foro dello statore, nonché il posizionamento delle parti frontali, sono suddivisi in: concentrici, con la disposizione delle bobine (sezioni) una dentro l'altra e la disposizione delle parti frontali su due o tre piani, tali avvolgimenti sono arrotolati; dima, con le stesse sezioni dei gruppi bobine. Possono essere eseguiti sia semplici che ondeggianti. Se, in un avvolgimento a strato singolo modello, la separazione viene eseguita non in semigruppi, ma in singole bobine, otteniamo un circuito di avvolgimento del circuito. I principali vantaggi di un avvolgimento a strato singolo: 1. Mancanza di isolamento interstrato, che aumenta il fattore di riempimento della scanalatura e, di conseguenza, la corrente e la potenza del motore. 2. Facilità di fabbricazione. 3. Grande possibilità di utilizzare l'automazione durante la posa degli avvolgimenti. Screpolatura: 1. Aumento del consumo di materiale conduttivo. 2. Difficoltà ad accorciare l'altezza e, di conseguenza, a compensare le armoniche più alte del flusso magnetico. 3. Limitazione della possibilità di realizzare avvolgimenti di un numero frazionario di cave per polo e fase. 4. Produzione e installazione più laboriose di bobine per grandi motori elettrici ad alta tensione. Gli avvolgimenti a due strati sono realizzati principalmente con le stesse sezioni: anello e catena, meno spesso prendono quelli concentrici. I principali vantaggi di un avvolgimento a due strati rispetto a un avvolgimento a uno strato: 1. La possibilità di un eventuale accorciamento del passo, che consente: a) ridurre il consumo del filo di avvolgimento riducendo la lunghezza della parte frontale del tratto; b) ridurre le componenti armoniche superiori del flusso magnetico, ovvero ridurre le perdite nel circuito magnetico del motore. 2. La semplicità del processo tecnologico di fabbricazione delle bobine (molte operazioni possono essere meccanizzate). 3. La possibilità di avvolgere con quasi ogni q frazionario, che garantisce la fabbricazione dell'avvolgimento durante la riparazione di motori asincroni con una variazione della velocità del rotore. Inoltre, questo è uno dei modi per approssimare la forma del campo a una sinusoide. 4. La possibilità di formare un numero maggiore di rami paralleli. Gli svantaggi degli avvolgimenti a doppio strato includono: 1. Minore fattore di riempimento della scanalatura (dovuto alla presenza dell'isolante interstrato). 2. Qualche difficoltà durante la posa delle ultime sezioni dell'avvolgimento. 3. la necessità di sollevare l'intero gradino di avvolgimento se la parte inferiore del profilato è danneggiata. Per questi motivi, attualmente, nella pratica di riparazione delle macchine corrente alternata gli avvolgimenti a doppio strato sono i più utilizzati. Pertanto, scegliamo un avvolgimento ad anello a due strati. 4. CALCOLO DEI DATI DELL'AVVOLGIMENTO L'avvolgimento di un motore asincrono, situato nel circuito magnetico del suo statore, è costituito da tre avvolgimenti di fase indipendenti (A, B, C). L'avvolgimento di una macchina trifase AC è caratterizzato dai seguenti dati di avvolgimento: y - passo di avvolgimento; q è il numero di asole per polo e fase (pari al numero di sezioni del gruppo bobine); N è il numero di gruppi di bobine; a è il numero di gradi elettrici per slot; a è il numero di rami paralleli. 1. Passo di avvolgimento Il passo di avvolgimento (y) è la distanza, espressa in denti (o scanalature), tra i lati attivi di una stessa sezione: dove y' è il passo calcolato (uguale alla divisione dei poli espressa in denti); x - un numero arbitrario minore di uno, portando il passo calcolato (y') a un numero intero. In pratica, è consuetudine determinare il gradino nelle scanalature, quindi, quando si dispone il secondo lato della sezione, si trova nella scanalatura y + 1. Gli avvolgimenti a due strati vengono eseguiti con un accorciamento del passo. dove Ku è il coefficiente di accorciamento del passo dell'avvolgimento In pratica e calcoli si è stabilito che la curva più favorevole per variare il flusso magnetico si ottiene accorciando il passo diametrale (calcolato) di Ku=0.8: y=0.8×18=14.4, prendiamo y=14 2. Numero di slot per polo e fase. Il numero di slot per polo e fase (q) determina il numero di sezioni nel gruppo bobine: dove m è il numero di fasi Ogni bobina di avvolgimento è coinvolta nella creazione di due poli, poiché i conduttori attivi di uno dei suoi lati hanno un verso di corrente, mentre gli altri sono opposti. Quando q>1, l'avvolgimento è detto disperso, mentre le bobine di fase devono essere suddivise in sezioni il cui numero è pari a q. 3. Numero di gruppi di bobine Negli avvolgimenti a due strati, il numero di gruppi di bobine è meccanicamente raddoppiato, tuttavia, rispetto a un avvolgimento a strato singolo con il numero di spire in ciascuna sezione è due volte inferiore, quindi: dove N 1f (2) è il numero di gruppi di bobine in una fase di un avvolgimento a due strati. Poiché ogni coppia di poli è creata da tutte e tre le fasi della corrente alternata, quindi: 4. Numero di gradi elettrici per slot Nel foro dello statore di un motore asincrono, una coppia di poli è 360 0 el. Questo è chiaramente visibile nella Figura 2. Quando il conduttore passa sotto una coppia di poli nel foro dello statore completamente in un giro, l'EMF in esso (appare) cambia in modo sinusoidale. In questo caso, si verifica un ciclo completo di cambiamento, che è di 360 gradi elettrici (Figura 2). Il numero di gradi elettrici per slot o lo spostamento angolare tra slot adiacenti: 5. Numero di rami paralleli I rami paralleli nell'avvolgimento di un motore a induzione sono realizzati per ridurre la sezione trasversale di un filo convenzionale, inoltre, ciò consente di caricare meglio il sistema magnetico della macchina. Colleghiamo in serie tutti i gruppi di bobine di questa fase, quindi il numero di rami paralleli è 1 (a = 1) (Fig. 3). Nella figura, le lettere H e K indicano rispettivamente l'inizio e la fine dei gruppi di bobine. Riso. 3. Collegamento gruppo bobine Quando sono collegati in parallelo, il numero di rami paralleli può, in linea di principio, essere uguale al numero di gruppi di bobine in una fase N 1f. I gruppi di bobine della fase possono essere collegati e combinati (parte in serie e parte in parallelo), ma in questo caso, in ogni caso, il numero di gruppi di bobine in ogni ramo parallelo deve essere lo stesso, a = 2. Il numero di rami paralleli viene inserito quando è necessario ridurre la sezione del filo. Numero massimo di rami paralleli: e max =2×p=2×1=2, accetta a=1. 6. Il principio di costruzione di un circuito dell'avvolgimento dello statore di un motore asincrono trifase Per ottenere un campo magnetico rotante di un motore asincrono trifase, per qualsiasi schema di avvolgimento, è necessario: 1. Spostamento nello spazio del foro dello statore di un motore asincrono di avvolgimenti di fase, uno rispetto all'altro di 120 0 el. 2. Spostamento temporale delle correnti che scorrono attraverso questi avvolgimenti La prima condizione è soddisfatta dall'opportuno impilamento dei gruppi di bobine avvolgimento trifase, il secondo - collegando un motore asincrono a una rete di corrente trifase. Quando si costruisce un circuito, l'avvolgimento della prima fase può generalmente iniziare da qualsiasi slot. Pertanto, il primo lato attivo della sezione viene posizionato nella prima scanalatura. Posizioniamo il secondo lato attivo della sezione attraverso dieci denti nell'undicesimo solco. Un gruppo di bobine ha quattro sezioni, quindi la seconda e le sezioni successive occupano rispettivamente 2 e 12, 3 e 13, 4 e 14 slot. Il numero di gruppi di bobine di una fase sarà quattro (calcolato sopra) In un avvolgimento monostrato, il primo gruppo di bobine partecipa alla creazione della prima coppia di poli, il secondo deve creare la seconda coppia di poli, quindi la distanza tra loro deve essere pari ad una coppia di poli, ovvero 360 gradi elettrici. A differenza degli avvolgimenti a strato singolo, negli avvolgimenti a doppio strato, i gruppi di bobine della stessa fase vengono spostati non di 360 gradi elettrici, ma di 180. Pertanto, la seconda bobina della fase "A" parte dal 19° solco. L'avvolgimento delle fasi "B" e "C" viene eseguito in modo simile, ma vengono spostati, rispettivamente, di 120 e 240 gradi elettrici rispetto all'avvolgimento della fase "A", ovvero nelle scanalature sarà: 5. CALCOLO DEL NUMERO DI GIRI NELL'AVVOLGIMENTO DI UNA FASE b) Diagramma vettoriale di un motore a induzione. Quando la tensione U f viene applicata all'avvolgimento, la corrente a vuoto scorrerà attraverso di esso (Fig. 4). Poiché la tensione varia in modo sinusoidale, la corrente sarà variabile. A sua volta, creerà un flusso magnetico Ф nel sistema magnetico della macchina, che sarà anche variabile. Un flusso magnetico variabile Ф viene indotto nelle spire dell'avvolgimento, che lo ha creato EMF (E Ф), diretto alla tensione applicata opposta (la legge dell'induzione elettromagnetica). L'EMF dell'avvolgimento di fase E F sarà la somma dell'EMF delle singole spire E 1v E f \u003d å E 1v o E f \u003d E 1v × W f dove W f è il numero di spire nell'avvolgimento di una fase. Inoltre, la corrente I xx crea una caduta di tensione DU sulla resistenza attiva e reattiva dell'avvolgimento. Pertanto, la tensione U f applicata all'avvolgimento è bilanciata dall'EMF E F e dalla caduta di tensione nell'avvolgimento DU. Tutto questo è mostrato in forma vettoriale in un diagramma vettoriale semplificato (Figura 4). Da quanto sopra e dal diagramma vettoriale ne consegue che La caduta di tensione è del 2,5 ... 4% di Uf, ovvero in media circa il 3%, senza compromettere la precisione del calcolo, puoi prendere: E f = 0,97 × U f; dove E f è l'EMF dell'avvolgimento di fase, V U f - tensione di fase, V Valore EMF istantaneo di un giro: dove t - tempo, s Il flusso magnetico cambia secondo la legge: Ф=Ф m ×peccato×p×t, dove F m - il valore di ampiezza del flusso magnetico, Wb; w è la frequenza angolare di rotazione del campo; Il valore massimo dell'EMF di un giro sarà quando allora (perché Il valore effettivo differisce dal massimo di Poiché l'avvolgimento è disperso, parte del flusso magnetico F si dissipa, tenendo conto del coefficiente di distribuzione K p: Quasi tutti gli avvolgimenti a due strati sono realizzati con un passo accorciato. Ciò porta al fatto che ai confini dei poli di sezioni di fasi diverse che giacciono nello stesso solco, la direzione delle correnti sarà opposta. Di conseguenza, il flusso totale di queste sezioni sarà uguale a zero, il che ridurrà il flusso magnetico totale F. Questo fenomeno tiene conto del fattore di accorciamento K y: K su \u003d K p × K y \u003d 0,96 × 0,94 \u003d 0,9 quindi infine l'EMF di un giro è uguale a: Numero di giri per fase: Nell'espressione risultante, U f e f sono dati dal cliente, per il calcolo è necessario conoscere solo F. È distribuito uniformemente sotto il polo (Figura 5), tuttavia, se le aree di un rettangolo di lato B cf e a semicerchio con raggio B d sono uguali, l'intensità del campo magnetico sotto il polo sarà la stessa. Il valore dell'induzione magnetica media: В ср - valore medio dell'induzione magnetica nel traferro, Тl C b - il valore massimo dell'induzione magnetica nel traferro, T Dalla tabella "carichi elettromagnetici normalizzati di motori asincroni" per potenze da 1 a 10 kW. Accettiamo B b \u003d 0,7 Da qui il valore del flusso magnetico: Numero di giri per fase: Il numero preliminare di spire nella fase è 94,52 pezzi, un tale avvolgimento non è fattibile, poiché parte della spira non può essere posizionata nelle fessure dello statore. D'altra parte, quando si divide il numero di spire dell'avvolgimento di fase in sezioni, è necessario distribuirle uniformemente in modo che il numero di spire in tutte le sezioni dell'avvolgimento W sec sia lo stesso, tale avvolgimento è chiamato sezione uguale . La condizione di uguale sezione è soddisfatta in base all'espressione per il numero di conduttori attivi nella scanalatura: dove a è il numero di rami paralleli. Nella formula, i due al numeratore mostrano che la bobina ha due conduttori attivi. Affinché il numero di spire nelle sezioni sia lo stesso, è necessario arrotondare il numero di conduttori attivi nella scanalatura: Con un unico strato di avvolgimento fino a valore intero, Con un doppio strato - fino a un numero intero pari. Arrotondiamo il numero di conduttori nella scanalatura a un numero intero pari e prendiamo Np = 16 Dopo aver arrotondato il numero di conduttori nella scanalatura, specifichiamo il numero di spire nella fase Specifichiamo il flusso magnetico, poiché dipende dal numero di giri nella fase Specifichiamo il valore delle induzioni magnetiche B d, B z, B c. Induzione magnetica nel traferro: Induzione magnetica nella zona dei denti dello statore: Induzione magnetica nella parte posteriore dello statore: Li confrontiamo con i valori massimi consentiti. Tutte le opzioni per il calcolo delle induzioni magnetiche sono riassunte nella Tabella 2. Tabella 2 Carichi del circuito magnetico Nome Formula di calcolo Opzioni di calcolo Limiti Il numero di conduttori nella scanalatura, N p Il numero di giri nell'avvolgimento di una fase, W f La grandezza del flusso magnetico Ф a W f Induzione del traferro, V d Induzione nei denti, V z Induzione nella parte posteriore dello statore, V s Secondo i risultati del calcolo, la tabella mostra che l'opzione più ottimale è 2, in cui il motore calcolato fornirà la massima potenza per il suo sistema magnetico. Se il carico massimo è normale, questa sarà l'opzione migliore. Se l'induzione magnetica in qualche sezione è al di sotto della norma, cioè la sezione è sottocarico (3) e in questo caso l'acciaio del circuito magnetico del motore a induzione sarà sottoutilizzato, la sua potenza sarà sottovalutata. Se i carichi magnetici sono superiori alla norma di induzione in qualsiasi sezione, allora questa sezione è sovraccaricata e il motore si surriscalda, questa opzione (1) non è consentita. L'opzione 2 sarebbe la migliore. 6. CALCOLO DEL NUMERO DI GIRI IN UNA SEZIONE Con un avvolgimento a strato singolo, i conduttori di una sezione (W sec) occupano completamente la scanalatura, quindi il numero di spire nella sezione è uguale al numero di conduttori attivi nella scanalatura. Con un avvolgimento a due strati, i conduttori di due sezioni giacciono in una scanalatura, pertanto il numero di spire in una sezione di avvolgimento a due strati (W sec) è uguale alla metà del numero di conduttori nella scanalatura. 7. SELEZIONE DELL'ISOLAMENTO DELLA SCANALATURA E DELLE TESTE DI AVVOLGIMENTO Lo scopo di questo isolamento è fornire la necessaria rigidità elettrica tra gli avvolgimenti di diverse fasi, nonché gli avvolgimenti e il circuito magnetico (scatola) di un motore a induzione. Inoltre, deve soddisfare i requisiti di resistenza al calore, resistenza chimica, resistenza all'umidità, ecc. L'isolamento della scanalatura (Figura 6) è costituito da una scatola scanalata 1, una guarnizione interstrato 2 (se l'avvolgimento è a due strati), una guarnizione a cuneo 3 e un cuneo a fessura 4. Le guarnizioni di interfase sono installate anche nelle parti frontali sezioni o gruppi di bobine, isolamento all'interno dei collegamenti della macchina, nonché sotto la fasciatura nella fessura e nelle parti frontali degli avvolgimenti. Durante la riparazione della serie IM A, A0, A2, A02 con resistenza al calore dell'isolamento: A ed E (che sono ancora la maggioranza nella Repubblica di Bielorussia) hanno ricevuto il maggior uso, slot box di 3 strati di dialettica: Il primo strato (posto in una scanalatura sul circuito magnetico), ha lo scopo di proteggere il secondo strato dai danni delle lamiere di acciaio, questi materiali, innanzitutto, richiedono un'elevata resistenza meccanica (elettrocartone, mica, ecc.). Il secondo strato è il principale isolamento elettrico, richiede un'elevata resistenza elettrica (tessuti verniciati, film flessibili, ecc.). Il terzo strato è costituito da un dielettrico meccanicamente forte, che, come il primo, protegge il secondo strato dai danni, ma con conduttori attivi che sono posti nella scanalatura (cartone elettrico, carta per cavi, ecc.). La scatola della scanalatura deve adattarsi perfettamente alle pareti della scanalatura, non piegarsi durante la posa dell'avvolgimento, essere resistente a strappi, punzonature, delaminazione e sufficientemente scivolosa. Anche l'isolamento sotto la copertura è realizzato in tre strati e le guarnizioni di interfase nelle parti frontali dell'avvolgimento possono avere uno, due o tre strati, a seconda dei materiali utilizzati. I materiali isolanti elettrici per tutte le parti dell'avvolgimento specificate sono selezionati in base alla tensione nominale della macchina, alla classe di resistenza al calore, alle condizioni operative, alla presenza di materiali dielettrici e per motivi economici. Ampia applicazione nel moderno macchine elettriche tensione fino a 1000 V ha ricevuto film sintetici e materiali realizzati con il loro uso: materiali compositi. Possono ridurre significativamente lo spessore dell'isolamento grazie alla loro elevata resistenza elettrica e spesso meccanica, che aumenta il fattore di riempimento della scanalatura. Il film in polietilene tereftalato (lavsan) PET e il film-elettrocartone sono utilizzati principalmente per la produzione di scatole a fessura e guarnizioni. In questo caso, due strisce di film-elettrocartone vengono piegate con una pellicola all'interno. Il film di poliammide PM viene utilizzato in macchine elettriche con resistenza al calore di isolamento fino a 220 0 С. Il film fluoroplastico F-4EO, F-4EN ha un'elevata resistenza all'umidità, resistenza ai solventi, chimica media attivi e utilizzati in macchine speciali (ad esempio per lavorare in compressori freon) e nei casi in cui la resistenza al calore dell'isolamento dovrebbe essere superiore a 220 0 C. tuttavia, i film fluoroplastici sono morbidi e quindi vengono utilizzati per l'isolamento delle scanalature in combinazione con altri materiali più rigidi. I materiali compositi hanno proprietà meccaniche sufficientemente elevate, sono forniti in rotoli. I film PET-F e PSK-LP sono realizzati con film PET, incollati su entrambi i lati con carta in fibra fenilica (PSK-D), o carta in fibra lavsan senza impregnazione (PSK-L) o con impregnazione (PSK-LP). Il film di mica GIP-LSP-PL è uno strato di mica flogopite, incollato da un lato con fibra di vetro, e dall'altro con film PET, è ampiamente utilizzato per isolare gli avvolgimenti da sezioni rigide. Per le guarnizioni nelle parti frontali vengono utilizzati materiali la cui superficie ha un coefficiente di attrito maggiorato, in particolare carta per cavi, cartone elettrico sottile, film di mica, film di amianto (sono utilizzati nei motori delle serie A, A2, A4 ). Isolamento dei collegamenti interni alla macchina e delle estremità di uscita eseguito tubi isolanti. In luoghi in cui non sono soggetti a flessione, torsione e compressione (durante il collegamento del circuito), vengono utilizzati tubi verniciati delle seguenti marche: TLV e TLS (a base di calza di vetro e vernice ad olio) - per macchine con isolamento termico classe A per il funzionamento in condizioni normali ambiente; TES - per macchine con classe di resistenza al calore B di tutte le versioni; TKS - per macchine con classe di resistenza al calore F e H di design chimicamente resistente. I tubi a base di gomma organofluorurata TRF sono i più flessibili e resistenti alle attorcigliamenti. Per la protezione meccanica e il fissaggio dell'isolamento vengono utilizzati nastri in cotone, vetro e lavsan. I nastri di cotone vengono utilizzati solo in macchine con classe di resistenza al calore A e solo in forma impregnata. I nastri di vetro sono adatti per macchine con classi di resistenza al calore E, B, F e H di tutte le versioni. Per ridurre le emissioni di polvere dal nastro di vetro, sono impregnati di vernici durante l'isolamento. I nastri Lavsan sono stati sviluppati negli ultimi anni e vengono introdotti nella produzione. Possono sostituire non solo i nastri di vetro, ma anche i cavi. Possono essere utilizzati per avvolgimenti con classe di isolamento H. I nastri Lavsan non richiedono impregnazione. Spessore dei nastri lavsan: calicò - 0,14 mm, cambrico - 0,15 mm. Il più comunemente usato per gli avvolgimenti è il nastro lavsan in taffetà, è disponibile in larghezze di 20, 28, 30 mm. Con una larghezza di 20 mm, il carico di rottura di tale nastro è di 390 N. Un grande vantaggio dei nastri lavsan è il loro ritiro dopo il trattamento termico, con conseguente allungamento aggiuntivo dell'isolamento. Per collegare e fasciare gli avvolgimenti dello statore nelle parti frontali, vengono utilizzate calze di cotone per l'isolamento della classe di resistenza termica A e calze di corda di vetro per le classi di resistenza al calore B, F, H. Tenendo conto della tensione nominale, della classe di resistenza al calore, delle condizioni operative dell'IM, della presenza di materiali dielettrici e di considerazioni economiche, scegliamo un film di triacetato di cellulosa sintetica di 35 micron di spessore. Utilizziamo anche materiali compositi a base di film sintetici (scegliamo cartone sintetico film PSK-LP, spessore 0,30 mm). Isoleremo la connessione interna e le estremità di uscita con tubi isolanti elettrici TPP con un diametro interno di 2,5 mm. Per la protezione meccanica e il fissaggio dell'isolante utilizziamo nastri in cotone lavsan e vetro LES, spessore 0,08 mm. Per la legatura e il bendaggio utilizziamo calze di cotone ASEC (b) -1.0. Materiali selezionati per l'isolamento delle scanalature e delle estremità dell'avvolgimento: 1° strato - cartone elettrico EMU, spessore 2° strato - panno verniciato LHM-105, spesso 3° strato - cartone elettrico EMU, spess Rigidità elettrica del 1° strato: Rigidità elettrica del 2° strato: Rigidità elettrica del 3° strato: La rigidità elettrica totale della scatola isolante asolata: Verifica della rigidità elettrica del manicotto: perché 12>1.0+2 quindi l'isolamento soddisfa le condizioni impostate, inoltre si possono prelevare dielettrici con uno spessore inferiore. Tuttavia, data la necessità di garantire la resistenza meccanica richiesta dell'isolamento, i materiali selezionati possono essere approvati. 8. SELEZIONE DEL MARCHIO E CALCOLO DELLA SEZIONE DEL FILO PER AVVOLGIMENTO La scelta della marca del filo avviene in funzione della tensione nominale, della classe di resistenza al calore, della versione, della potenza del motore e di considerazioni economiche. Sezione trasversale stimata del filo con isolamento: dove K z è il fattore di riempimento della scanalatura; K s \u003d 0,48 Questo diametro non è nelle tabelle, quindi scegliamo il numero di sezioni parallele a' = 2 Diametro del filo calcolato con isolamento: Diametro filo isolato deve essere 1,5 ... 2 mm inferiore alla larghezza della scanalatura d'
Diametro standardizzato del filo isolato Sezione del filo recintato: Determinare il fattore di riempimento effettivo della scanalatura: Avvolgeremo l'avvolgimento del motore con un filo: 9. CALCOLO DELLE DIMENSIONI DELLA SEZIONE (LUNGHEZZA BOBINA) La determinazione della lunghezza della bobina è necessaria per impostare la dima nella produzione di sezioni di gruppi di bobine. Lunghezza media della bobina: dove l a è la lunghezza della fessura (attiva) della bobina, m In assenza di canali di raffreddamento trasversali nel circuito magnetico l l - lunghezza della parte frontale della bobina, m. dove k - fattore di correzione, T è la larghezza media della sezione, m. 10. CALCOLO DEL PESO DELL'AVVOLGIMENTO Il calcolo della massa dell'avvolgimento è necessario per ottenere il filo dell'avvolgimento dal magazzino. La massa del metallo dell'avvolgimento è determinata moltiplicando la densità del materiale conduttore per il volume del filo: dove g è la densità del materiale del conduttore, kg / m 3, (per rame - 8900 kg / m 3).Gli avvolgimenti a strato singolo sono realizzati principalmente con modelli semplici, modelli nella "guasta", catena, concentrici.
![]()
![]() 2×1=2
2×1=2 ![]()

Riso. 2. Cambiamento di campi elettromagnetici sotto i poli. ![]()
![]() .
.
![]() ;
; ![]()
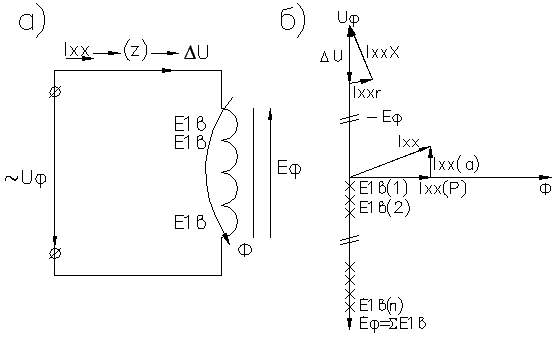
Riso. 4. a) Il circuito equivalente dell'avvolgimento di un motore asincrono; 
![]()
![]()
![]()
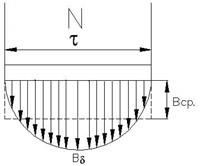
Riso. 5. Campo magnetico del polo.  (Wb) - coefficiente che tiene conto dell'uniformità della distribuzione del flusso magnetico sotto il polo.
(Wb) - coefficiente che tiene conto dell'uniformità della distribuzione del flusso magnetico sotto il polo.  PZ
PZ ![]() PZ
PZ  wb
wb  tl
tl  tl
tl ![]() tl
tl
![]()
![]()
![]()

Riso. 6. Isolamento dell'avvolgimento della fessura. ![]() kV;
kV; ![]() kV.
kV.  mm2
mm2  mm
mm  mm
mm ![]()

![]() (m)
(m)
Ti consigliamo di leggere
, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito
Aspettare o non aspettare un ragazzo dell'esercito Per quale motivo possono essere commissionati all'esercito Mele al forno con ricotta Mele al forno con ricotta
Mele al forno con ricotta Mele al forno con ricotta

