Ele sunt determinate în principal de modul în care este activată înfășurarea de excitație. În funcție de aceasta, motoarele electrice se disting:
1. cu stimulare independentă: înfăşurarea de excitaţie este alimentată de o sursă externă curent continuu(excitator sau redresor),
2. Cu excitație paralelă : înfășurarea câmpului este conectată în paralel cu înfășurarea armăturii,
3.: înfășurarea câmpului este conectată în serie cu înfășurarea armăturii,
4. cu entuziasm amestecat: are două înfășurări de excitație, una conectată în paralel cu înfășurarea armăturii și cealaltă în serie cu aceasta.
Toate aceste motoare electrice au același dispozitiv și diferă doar în implementarea înfășurării de excitație. Înfășurările de excitație ale acestor motoare electrice se realizează în același mod ca și pentru.
motor electric curent continuu cu stimulare independentă
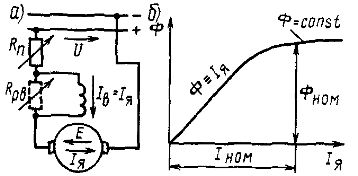
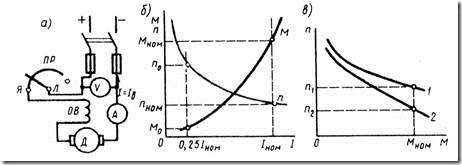
În acest motor electric (Fig. 1, a), înfășurarea armăturii este conectată la sursa principală de curent continuu (rețea de curent continuu, generator sau redresor) cu tensiunea U, iar înfășurarea de excitație este conectată la o sursă auxiliară cu tensiunea UB. Reostatul de control Rrv este inclus în circuitul de înfășurare de excitație, iar reostatul de pornire Rn este inclus în circuitul de înfășurare a armăturii.
Reostatul de reglare este utilizat pentru a regla viteza de rotație a armăturii motorului, iar reostatul de pornire este utilizat pentru a limita curentul din înfășurarea armăturii în timpul pornirii. trăsătură caracteristică motorul electric este că curentul său de excitație Iv nu depinde de curentul Ii din înfășurarea armăturii (curent de sarcină). Prin urmare, neglijând efectul de demagnetizare al reacției armăturii, putem presupune aproximativ că fluxul motorului Ф nu depinde de sarcină. Dependența cuplului electromagnetic M și a vitezei de rotație n de curentul Il vor fi liniare (Fig. 2, a). În consecință, caracteristica mecanică a motorului va fi și liniară - dependență n (M) (Fig. 2, b).
În absența unui reostat cu rezistență Rn în circuitul armăturii, viteza și caracteristicile mecanice vor fi rigide, adică cu un mic unghi de înclinare față de axa orizontală, deoarece căderea de tensiune IаΣRя în înfășurările mașinii incluse în circuitul armăturii la sarcina nominală este de numai 3-5 % din Unom. Aceste caracteristici (liniile drepte 1 din Fig. 2, a și b) se numesc naturale. Atunci când în circuitul armăturii este inclus un reostat cu rezistență Rn, panta acestor caracteristici crește, drept urmare se poate obține o familie de caracteristici de reostat 2, 3 și 4, corespunzătoare sensuri diferite Rn1, Rn2 și Rn3.
Orez. 1. Scheme schematice ale motoarelor electrice curent continuu cu excitație independentă (a) și paralelă (b).
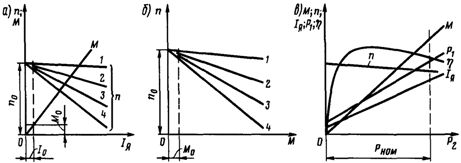
Orez. 2. Caracteristicile motoarelor electrice curent continuu cu excitație independentă și paralelă: a - viteză mare și cuplu, b - mecanic, c - de lucru mai multa rezistenta Rn, cu cât unghiul de înclinare este mai mare caracteristica reostatică, adică cu atât este mai moale.
Reostatul de reglare Rpv vă permite să modificați curentul de excitație al motorului Ib și fluxul magnetic al acestuia Ф. În acest caz, se va modifica și viteza de rotație n.
Nu sunt instalate întrerupătoare și siguranțe în circuitul de înfășurare de excitație, deoarece atunci când acest circuit se întrerupe, fluxul magnetic al motorului electric scade brusc (numai fluxul din magnetismul rezidual rămâne în el) și are loc un mod de urgență. Dacă motorul electric funcționează la ralanti sau cu o sarcină mică pe arbore, atunci viteza crește brusc (motorul funcționează sălbatic). În acest caz, curentul în înfășurarea armăturii Ia crește foarte mult și poate apărea un incendiu general. Pentru a evita acest lucru, protecția trebuie să deconecteze motorul de la sursa de alimentare.
O creștere bruscă a vitezei de rotație atunci când circuitul înfășurării de excitație este întreruptă se explică prin faptul că în acest caz fluxul magnetic Ф scade brusc (la valoarea fluxului Fost din magnetismul rezidual) și e. d.s. E și Iya actuală crește. Și deoarece tensiunea aplicată U rămâne neschimbată, viteza de rotație n va crește până la e. d.s. E nu va atinge o valoare aproximativ egală cu U (care este necesară pentru starea de echilibru circuit electric ancore, la care E= U - IаΣRя.
Când sarcina pe arbore este aproape de valoarea nominală, motorul electric se va opri în cazul unei întreruperi a circuitului de excitație, deoarece moment electromagnetic, pe care motorul îl poate dezvolta cu o scădere semnificativă a fluxului magnetic, scade și devine mai mic decât cuplul de sarcină pe arbore. În acest caz, curentul Ia crește și el brusc, iar mașina trebuie deconectată de la sursa de alimentare.
Trebuie remarcat faptul că turația de rotație n0 corespunde ralantiului ideal, atunci când motorul nu consumă energie electrică din rețea și cuplul său electromagnetic este zero. În condiții reale, în regim de ralanti, motorul consumă curentul de ralanti I0 din rețea, care este necesar pentru a compensa pierderi interne putere și dezvoltă un anumit moment M0 necesar pentru a depăși forțele de frecare din mașină. Prin urmare, în realitate, turația în gol este mai mică decât n0.
Dependența vitezei de rotație n și a cuplului electromagnetic M de puterea P2 (Fig. 2, c) de pe arborele motorului, după cum reiese din relațiile considerate, este liniară. Dependența curentului de înfășurare a armăturii Iya și puterea P1 de P2 sunt, de asemenea, aproape liniare. Curentul Ia și puterea P1 la P2 = 0 sunt curentul în gol I0 și puterea P0 consumată în gol. Curba randamentului are un caracter comun tuturor mașinilor electrice.
motor electric curent continuu cu excitaţie paralelă
În acest motor electric (vezi Fig. 1, b), înfășurările de câmp și de armătură sunt alimentate de la aceeași sursă de energie electrică cu tensiunea U. Reostatul de control Rpv este inclus în circuitul de înfășurare de câmp, iar reostatul de pornire Rp este inclus. în circuitul de înfăşurare a armăturii.
În motorul electric luat în considerare, există în esență o sursă de alimentare separată pentru circuitele de înfășurare a armăturii și excitație, drept urmare curentul de excitație Iv nu depinde de curentul de înfășurare a armăturii Iv. Prin urmare, un motor excitat în paralel va avea aceleași caracteristici ca un motor excitat independent. Cu toate acestea, un motor excitat în paralel funcționează corect numai atunci când este alimentat de o sursă de curent continuu cu tensiune constantă.
Când motorul electric este alimentat de la o sursă cu o tensiune variabilă (generator sau redresor controlat), o scădere a tensiunii de alimentare U determină o scădere corespunzătoare a curentului de excitație Iv și a fluxului magnetic F, ceea ce duce la o creștere a înfășurării armăturii. curent Ia. Aceasta limitează capacitatea de a controla viteza armăturii prin modificarea tensiunii de alimentare U. Prin urmare, motoarele electrice proiectate să fie alimentate de un generator sau de un redresor controlat trebuie să fie excitate independent.
motor electric curent continuu cu excitaţie secvenţială
Pentru limitarea curentului la pornire, în circuitul de înfășurare a armăturii este inclus un reostat de pornire Rp (Fig. 3, a), iar pentru controlul vitezei de rotație se poate conecta în paralel cu înfășurarea de câmp un reostat de reglare Rrv.
Orez. 3. Schema schematică a motorului electric curent continuu cu excitație în serie (a) și dependența fluxului său magnetic Ф de curentul Iа din înfășurarea armăturii (b)
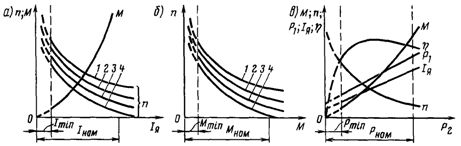
Orez. 4. Caracteristicile motorului electric curent continuu cu excitație secvențială: a - viteză mare și cuplu, b - mecanic, c - muncitori.
O caracteristică caracteristică a acestui motor electric este că curentul său de excitație Iv este egal sau proporțional (când reostatul Rpv este pornit) cu curentul de înfășurare a armăturii Ia, prin urmare fluxul magnetic Ф depinde de sarcina motorului (Fig. 3, b). ).
Cu curentul de înfășurare a armăturii I, mai mic (0,8-0,9) curent nominal Inom sistemul magnetic al mașinii nu este saturat și putem presupune că fluxul magnetic Ф se modifică direct proporțional cu curentul Iа. De aceea caracteristica vitezei motorul electric va fi moale - cu o creștere a curentului, viteza Ith n va scădea brusc (Fig. 4, a). Scăderea vitezei de rotație n are loc datorită creșterii căderii de tensiune IяΣRя. în rezistență internă Rya. circuitele de înfășurare a armăturii, precum și datorită creșterii fluxului magnetic F.
Momentul electromagnetic M cu o creștere a curentului Ia va crește brusc, deoarece în acest caz crește și fluxul magnetic F, adică momentul M va fi proporțional cu curentul Ia. Prin urmare, la un curent Ia mai mic de (0,8 N-0,9) Inom, caracteristica viteză are forma unei hiperbole, iar caracteristica moment are forma unei parabole.
La curenții Il > Inom, dependențele lui M și n față de Il sunt liniare, deoarece în acest mod circuitul magnetic va fi saturat și fluxul magnetic Ф nu se va modifica atunci când se schimbă curentul Il.
Caracteristica mecanică, adică dependența lui n de M (Fig. 4, b), poate fi construită pe baza dependențelor lui n și M de Ib. Pe lângă caracteristica naturală 1, este posibil să se obțină o familie de caracteristici de reostat 2, 3 și 4 prin includerea unui reostat cu rezistență Rp în circuitul de înfășurare a armăturii Aceste caracteristici corespund diferitelor valori ale Rn1, Rn2 și Rn3, în timp ce cu cât Rn este mai mare, cu atât caracteristica este mai mică.
Caracteristica mecanică a motorului considerat este moale și are un caracter hiperbolic. La sarcini mici, fluxul magnetic Ф scade foarte mult, viteza de rotație n crește brusc și poate depăși valoarea maximă admisă (motorul se epuizează). Prin urmare, astfel de motoare nu pot fi utilizate pentru a antrena mecanisme care funcționează în regim de ralanti și la sarcină mică (diverse mașini-unelte, transportoare etc.).
De obicei minim sarcina admisibila pentru motoarele de putere mare și medie este (0,2 .... 0,25) Inom. Pentru a preveni funcționarea motorului fără sarcină, acesta este conectat rigid la mecanismul de antrenare (angrenaj sau ambreiaj oarbă), utilizarea unei transmisii prin curea sau a unui ambreiaj cu frecare este inacceptabilă.
În ciuda acestui dezavantaj, motoarele excitate în serie sunt utilizate pe scară largă, mai ales acolo unde există modificări largi ale cuplului de sarcină și condiții dificile de pornire: în toate mecanismele de tracțiune (locomotive electrice, locomotive diesel, trenuri electrice, mașini electrice, stivuitoare electrice etc.), precum şi în acţionarea mecanismelor de ridicare a sarcinii (macarale, ascensoare etc.).
Acest lucru se explică prin faptul că, cu o caracteristică moale, o creștere a cuplului de sarcină duce la o creștere mai mică a consumului de curent și putere decât la motoarele cu excitație independentă și paralelă, prin urmare motoarele cu excitație în serie tolerează mai bine suprasarcinile. În plus, aceste motoare au un cuplu de pornire mare decât motoarele cu excitație paralelă și independentă, deoarece odată cu creșterea curentului înfășurării armăturii la pornire, fluxul magnetic crește, de asemenea, în mod corespunzător.
Dacă acceptăm, de exemplu, că curentul de pornire pe termen scurt poate fi de 2 ori curentul nominal de funcționare al mașinii și neglijăm efectul de saturație, reacția armăturii și căderea de tensiune în circuitul înfășurării sale, atunci într-un motor cu excitație în serie, cuplul de pornire va fi de 4 ori mai mare decât cel nominal (în atât curentul, cât și fluxul magnetic cresc de 2 ori), iar la motoarele cu excitație independentă și paralelă - doar de 2 ori mai mult.
În realitate, din cauza saturației circuitului magnetic, fluxul magnetic nu crește proporțional cu curentul, dar totuși cuplul de pornire al unui motor excitat în serie, celelalte lucruri fiind egale, va fi semnificativ mai mare decât cuplul de pornire al același motor cu excitație independentă sau paralelă.
Dependența lui n și M de puterea P2 pe arborele motorului (Fig. 4, c), după cum reiese din prevederile de mai sus, sunt neliniare, dependențele lui P1, Ip și η de P2 au aceeași formă ca și pentru motoare cu excitație paralelă.
motor electric curent continuu cu entuziasm amestecat
În acest motor electric (Fig. 5, a), fluxul magnetic Ф este creat ca urmare a acțiunii comune a două înfășurări de excitație - paralele (sau independente) și serie, prin care curenții de excitație Iv1 și Iv2 \u003d Iа
De aceea
![]()
unde Фposl este fluxul magnetic al înfășurării în serie, în funcție de curentul Il, Фpar este fluxul magnetic al înfășurării paralele, care nu depinde de sarcină (determinat de curentul de excitație Iв1).
Caracteristica mecanică a unui motor electric cu excitație mixtă (Fig. 5, b) este situată între caracteristicile motoarelor cu excitație paralelă (drept 1) și serie (curba 2). În funcție de raportul forțelor magnetomotoare ale înfășurărilor paralele și serie în modul nominal, este posibil să se aproximeze caracteristicile unui motor cu excitație mixtă la caracteristica 1 (curba 3 cu o mică ppm a înfășurării în serie) sau la caracteristica 2 (curba 4 pentru un mic ppm).cu înfășurare paralelă).
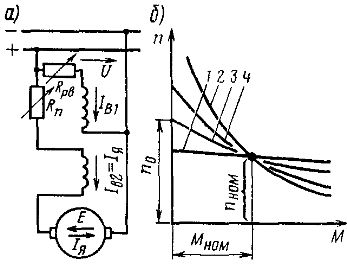
Orez. 5. Schema schematică a unui motor electric cu excitație mixtă (a) și caracteristicile sale mecanice (b)
Avantajul motorului curent continuu cu excitație mixtă este că, având o caracteristică mecanică moale, poate funcționa la ralanti, când Fposl = 0. În acest mod, frecvența de rotație a armăturii sale este determinată de fluxul magnetic Фpar și are o valoare limitată (motorul nu funcționează sălbatic).
[document]1.doc
Tema #2(modulul 5)
„Motor de curent continuu cu excitație în serie. Atribuirea elementelor. Principiul de funcționare"
gr.TP-07
Asmolkova O. A.
Semestrul I 2009
Motor DC cu excitație în serie. Atribuirea elementelor. Principiul de funcționare
1. Dispozitivul și scopul elementelor motorului de curent continuu
.
motor DC - mașină electrică , Mașină DC, transformând energie electrica DC in energie mecanică. Se compune, ca toate mașinile de curent continuu, dintr-un stator fix cu poli și un rotor rotativ (armatură) cu colector.
stator Mașina de curent continuu constă dintr-un cadru cilindric (carcasa), poli cu înfășurare de excitație și scuturi de capăt ( orez. 2.1.). Pe pat, polii principali (principali) sunt întăriți pentru a excita fluxul magnetic principal și alții suplimentari pentru a îmbunătăți comutarea motorului. Stâlpul principal constă dintr-un miez de stâlp din tablă de oțel și fixat pe cadru și o bobină de excitare. Miezul de la capătul liber este prevăzut cu o piesă polară pentru a crea distribuția necesară a inducției magnetice de-a lungul circumferinței armăturii. pat 3 este jugul mașinii, adică piesa care închide circuitul magnetic al fluxului principal Ф. Este realizat din oțel turnat, deoarece fluxul magnetic în acesta este relativ constant. Pe cadru sunt instalați stâlpi suplimentari între cei principali. Înfășurarea lor este conectată în serie cu înfășurarea armăturii. Scopul acestor poli este de a crea un câmp magnetic suplimentar. Acest lucru este necesar pentru ca periile de pe colector să nu strălucească.
Ancoră (rotorul) se numește partea mașinii, în înfășurarea căreia, atunci când se rotește față de principal camp magnetic EMF este indusă. Ancoră 5 Motorul de curent continuu este format dintr-un arbore de oțel, un miez dinți de oțel, o înfășurare așezată în canelurile sale și un colector montat pe arborele armăturii ( orez. 2.1.). Înfășurările de câmp sunt necesare pentru a asigura o interacțiune optimă între câmpurile magnetice ale rotorului și statorului (adică să creeze cuplul maxim pe rotor). parte caracteristică a motorului (sau oricare mașină electrică) DC este colectorul. Acesta este un cilindru gol asamblat din plăci de cupru în formă de pană izolate unele de altele. Plăcile distribuitoarelor sunt, de asemenea, izolate de arborele motorului. Acestea sunt conectate prin conductori la firele de înfășurare plasate în canelurile armăturii. Înfășurarea rotativă este conectată la circuitul extern printr-un contact de alunecare între perii și comutator. Colectorul din mașinile de curent continuu servește la rectificarea EMF variabilă indusă în înfășurarea armăturii rotative și la obținerea unui moment electromagnetic constant în direcție.
Orez. 2. 1. Dispozitiv cu motor DC:
1 - înfăşurare de excitaţie;2 - stalpi;3 - pat;4 - vârful stâlpului;5 - ancoră;6 - conductoare de înfăşurare de ancorare;
7 - miez de ancorare dintata;8 - spațiu de aer al mașinii
2. Principiul de funcționare al motorului DC
2.1 Informații generale
Când înfășurarea armăturii se rotește într-un câmp magnetic fix, este indusă în ea un EMF variabil, modificându-se cu frecvența:
Unde n- viteza de rotație a armăturii.
Când armătura se rotește, o EMF variabilă acționează între oricare două puncte ale înfășurării armăturii. Cu toate acestea, între periile de contact fixe, acționează o constantă EMF ca mărime și direcție E, egal cu suma valorilor instantanee ale EMF induse în toate spirele conectate în serie ale armăturii situate între aceste perii.
dependență de EMF E din fluxul magnetic al mașinii și viteza de rotație a armăturii are forma:
La conectarea înfășurării armăturii la o rețea cu tensiune U, EMF E va fi aproximativ egală cu tensiunea U, și viteza rotorului:
Prin urmare, datorită prezenței unui colector, atunci când o mașină de curent continuu funcționează într-un mod de motor, turația rotorului nu este strict legată de frecvența rețelei, dar poate varia într-o gamă largă prin modificarea tensiunii. Uși fluxul magnetic F. Axa de simetrie care separă polii unei mașini de curent continuu se numește neutru geometric.
Cu un circuit extern deschis, curentul din înfășurarea armăturii nu va curge, deoarece EMF indus în două părți ale înfășurării armăturii situate pe ambele părți ale neutrului geometric sunt direcționate opus și se compensează reciproc. Pentru a furniza tensiunea maximă de la înfășurarea armăturii către circuitul extern, acest circuit trebuie conectat la două puncte ale înfășurării armăturii, între care funcționează cea mai mare diferență de potențial, unde trebuie instalate periile. Când armătura se rotește, punctele se deplasează de la neutrul geometric, dar tot mai multe puncte noi de înfășurare se vor apropia de perii, între care acţionează EMF. E, astfel încât EMF din circuitul extern va fi neschimbat în mărime și direcție. Pentru a reduce ondulațiile EMF în timpul tranziției periilor de la o placă colectoare la alta, cel puțin 16 conductori activi sunt de obicei incluși în fiecare ramură paralelă a înfășurării armăturii.
Pe armătură, prin înfășurarea căreia curge curent eu, momentul electromagnetic actioneaza:
Când mașina funcționează în modul motor, cuplul electromagnetic se rotește.
2.2 Reacția armăturii motorului DC
La ralanti, fluxul magnetic din motor este creat numai de HC ^Fîn înfăşurările de excitaţie. În acest caz, fluxul magnetic F în cu un spațiu de aer constant între armătură și miezul stâlpului principal (ceea ce este tipic pentru multe mașini de curent continuu), este distribuit simetric în raport cu axa longitudinală a mașinilor.
Când mașina funcționează sub sarcină, un curent trece prin înfășurarea armăturii, iar NS-ul armăturii își creează propriul câmp magnetic. Se numește efectul câmpului armăturii asupra câmpului magnetic al mașinii reacție de ancorare. flux magnetic F aq creat de na ancora F aqîntr-o mașină cu doi poli, atunci când se instalează perii pe neutru, este îndreptată de-a lungul axul transversal mașini, deci câmpul magnetic al armăturii se numește transversal. Ca urmare a fluxului F aq distribuția simetrică a câmpului magnetic al mașinii este distorsionată, iar fluxul rezultat F a tăia este concentrat mai ales la marginile polilor principali. În acest caz, neutru fizic b-b(linia care leagă punctele cercului de armătură la care inducția este zero) este deplasată în raport cu geometria neutru a-a la un anumit unghi β (fig.2.2). La motoare, neutrul fizic este deplasat împotriva sensului de rotație.
Pe baza legii curent complet Armătura NS, care acționează în spațiul de aer la o distanță x de axa polilor principali este determinată de expresia:
Prin urmare, NS ancore F aq variază liniar de-a lungul circumferinței sale; sub mijlocul stâlpului principal este egal cu zero, iar în punctele în care sunt instalate periile are o valoare maximă. Inducția magnetică în aer
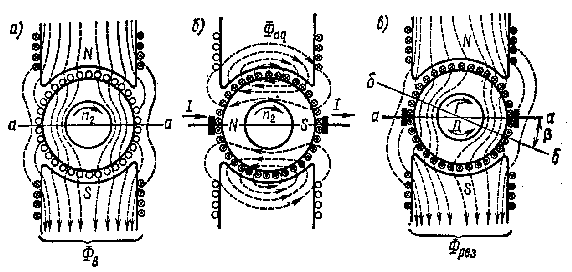
^ Fig2.2 - Câmpul magnetic al unui motor de curent continuu: a) din înfăşurarea de excitaţie; b) din înfăşurarea armăturii; c) rezultat (F în - flux magnetic la x.x.; F aq - flux magnetic creat de armătura NS; F a tăia - fluxul rezultat; a-a - neutru geometric; b-b - neutru fizic; β – unghiul de deplasare neutru b-b)
Clearance cu sistem magnetic nesaturat:
Unde este valoarea golului de aer în punctul x.
2.3 Cuplu motor DC
Dacă înfășurarea de câmp și armătura motorului sunt conectate la o rețea DC cu o tensiune ^u apoi, există un cuplu electromagnetic M Em. Cuplu util M pe arborele motorului este mai mică decât electromagnetică cu valoarea momentului de contracarare creat în mașină de forțele de frecare și egală cu momentul M Xîn modul x.x., adică M = M Em -M X .
Cuplul de pornire motorul trebuie să fie mai mare decât frâna statică M t în starea de repaus a rotorului, altfel armătura motorului nu va începe să se rotească. În stare de echilibru (la n = const) există un echilibru al momentelor M de rotație și M t de frânare:
M = M Em – M X = M t
Se știe de la mecanici că putere mecanică motorul poate fi exprimat în termeni de cuplu și viteză unghiulară
Prin urmare, cuplul util al motorului ^M(N m) exprimat în termeni de putere netă R(kW) și viteza n(rpm),
M=9550P/n
Să discutăm câteva probleme importante legate de pornirea și funcționarea motoarelor de curent continuu. Din ecuația stării electrice a motorului rezultă că
eu eu = (U -- E)/R eu
În modul de funcționare, curentul de armătură I I este limitat e. d.s. E, dacă n este aproximativ egal cu n nom. La momentul lansării, n = 0, e. d.s. E = 0și curent de pornire eu P = U/ R eu De 10-30 de ori mai mult decât nominal. Prin urmare, pornirea directă a motorului, adică conectarea directă a armăturii la tensiunea de rețea, este inacceptabilă. Pentru a limita curentul mare de pornire al armăturii, înainte de pornire este conectat un reostat de pornire în serie cu armătura. R P cu putina rezistenta. În acest caz, când E = O
eu P =U/(R eu - R P ) << U/R eu
Rezistența reostatului RP este selectat în funcție de curentul de armătură admis.
Pe măsură ce motorul accelerează până la turația nominală e. d.s. E crește, iar curentul scade și reostatul de pornire este îndepărtat treptat și complet (reostatele de pornire sunt proiectate pentru pornire pe termen scurt). Reglarea reostatului R regîntr-un circuit de excitație cu o rezistență relativ mare (zeci și sute de ohmi) înainte de pornirea motorului, acesta este complet îndepărtat astfel încât la pornire curentul de excitație și fluxul magnetic al statorului F au fost nominale. Acest lucru are ca rezultat o creștere a cuplului de pornire, ceea ce permite accelerarea rapidă și ușoară a motorului.
După pornire și accelerare, are loc o funcționare constantă a motorului, în care cuplul de frânare pe arbore ^ Mt va fi echilibrat de momentul dezvoltat de motor M Em , adică M Em == M t ( la n = const. )
Motoarele de curent continuu pot restabili starea de funcționare stabilă perturbată de o modificare a cuplului de frânare, adică pot dezvolta cuplu. M, egal cu noua valoare a cuplului de frânare M t la o viteză corespunzător nouă n".
Într-adevăr, dacă cuplul de frânare al sarcinii M t este mai mare decât cuplul motor M Em, atunci viteza armăturii va scădea. La tensiune constantă Uși curge F aceasta va determina o scădere. d.s. E armătură, crescând curentul și cuplul armăturii până la atingerea echilibrului, la care M Em = M t și n" < n. Când cuplul de frânare este redus la M t, modul de funcționare în regim stabil se stabilește în mod similar la M Em = M t"și n"> n" . Astfel, motoarele de curent continuu au proprietatea de autoreglare - poate dezvolta un cuplu egal cu cuplul de frânare.
2.4 Controlul frecvenței
Viteza armăturii unui motor de curent continuu este determinată pe baza ecuației stării electrice U= ER eu eu eu după înlocuirea lui e. d.s. E = sfn:

Căderea de tensiune a armăturii R eu eu eu mic: la sarcina nominală, nu depășește 0,03 - 0,07 U nom .
Astfel, viteza unui motor de curent continuu este direct proporțională cu tensiunea de rețea aplicată și invers proporțională cu fluxul magnetic al statorului. . Există două moduri de reglare a turației motorului: prin modificarea fluxului statorului F sau a tensiunii U furnizate motorului. Controlul vitezei prin modificarea câmpului magnetic al mașinii se realizează cu ajutorul unui reostat de reglare în circuitul de excitare a motorului. Tensiunea furnizată motorului este modificată prin reglarea tensiunii sursei.
Puteți adăuga un reostat suplimentar la circuitul armăturii. În acest caz, reostatul de pornire este înlocuit cu un balast R etc Un astfel de reostat îndeplinește atât funcțiile unui reostat de pornire, cât și ale unui reostat de reglare. În acest caz, ecuația frecvenței de rotație a armăturii pentru un motor de curent continuu are forma
De aici rezultă că reglarea turației motorului poate fi efectuată prin modificarea tensiunii de rețea, a rezistenței reostatului de balast sau a fluxului statorului.
Inversarea motorului. Din ecuația cuplului motorului M Em = kFeu eu rezultă că inversarea, adică schimbarea direcției de rotație a armăturii, poate fi efectuată prin schimbarea direcției curentului în înfășurarea de excitație (debit F) sau curent de armătură.
Pentru a inversa motorul „din mers”, direcția curentului armăturii este schimbată (prin comutarea cablurilor armăturii), iar înfășurarea de excitație nu este comutată, deoarece are o inductanță mare și întreruperea circuitului cu curent este inacceptabilă. Inversarea motorului deconectat se realizează și prin schimbarea direcției curentului în înfășurarea câmpului (comutarea ieșirilor acestuia).
3. Motor cu excitație în serie
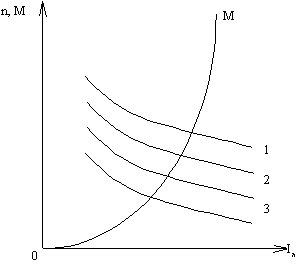
Într-un motor cu excitație în serie ( fig.2.3a) curentul de excitație este egal cu curentul de armătură: eu în =I A, deci fluxul magnetic Ф este o funcție a curentului de sarcină eu A. Natura acestei funcții variază în funcție de mărimea sarcinii. La eu A <(0,8...0,9) I nom când sistemul magnetic este nesaturat, f=k f eu A, și coeficientul de proporționalitate La fîntr-o gamă semnificativă de sarcini rămâne aproape constantă. Odată cu creșterea suplimentară a sarcinii, debitul F crescând mai încet decât eu A > eu nom) putem presupune că F=const. În conformitate cu aceasta, se schimbă și dependențele. n=f(I A ), M=f(I A) (orez. 2.3.b).
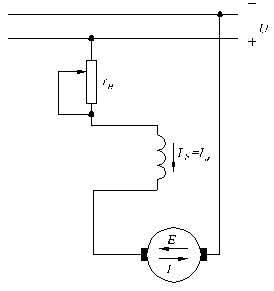
Orez. 2.3. - a) schema motorului cu excitaţie secvenţială; b) dependența cuplului și a vitezei sale de rotație de curentul armăturii (I eu – curent de armătură; eu în – curent de excitație;r n
- rezistenta la sarcina;
n- viteza de rotatie; 1 - caracteristică naturală; 2,3 - caracteristici reostatice corespunzătoare diferitelor valori ale rezistenței suplimentare r n ).
Pe lângă caracteristicile naturale 1, este posibil să se obțină o familie de caracteristici de reostat 2, 3 și 4 prin includerea rezistențelor suplimentare r n în circuitul armăturii.Cu cât valoarea lui r n este mai mare, cu atât caracteristica este mai mică.
La sarcini mici, viteza n crește brusc și poate depăși valoarea maximă admisă (motorul intră în „spațiere”). Prin urmare, astfel de motoare nu pot fi utilizate pentru a acționa mecanisme care funcționează în modul de ralanti și la sarcină mică.
Cu o caracteristică rigidă, viteza de rotație n aproape că nu depinde de momentul M, deci puterea:
![]() , Unde DIN 4
- constant.
, Unde DIN 4
- constant.
Cu o caracteristică moale a motorului, n este invers proporțional, drept urmare:
![]() , unde este o constantă.
, unde este o constantă.
Prin urmare, atunci când momentul de sarcină se modifică într-o gamă largă, puterea R 2 , si de aici puterea R 1 si curent eu A modificare pentru motoarele cu excitație în serie într-o măsură mai mică decât pentru un motor cu excitație paralelă, în plus, tolerează mai bine suprasarcinile.
În acest motor, înfășurarea câmpului este conectată în serie la circuitul armăturii (Fig. 29.9, A), de aceea flux magneticF depinde de curentul de sarcină I = I a = I in . La sarcini mici, sistemul magnetic al mașinii nu este saturat și dependența fluxului magnetic de curentul de sarcină este direct proporțională, adică. F = k f I A (k f- coeficient de proporţionalitate). În acest caz, găsim momentul electromagnetic:
Formula frecvenței de rotație va lua forma
 . (29.15)
. (29.15)
Pe fig. 29,9, b datele de performanță prezentate M = F(I) și n= (I) motor de excitație în serie. La sarcini mari, are loc saturarea sistemului magnetic al motorului. În acest caz, fluxul magnetic practic nu se modifică odată cu creșterea sarcinii, iar caracteristicile motorului devin aproape rectilinii. Caracteristica vitezei motorului cu excitație în serie arată că turația motorului se modifică semnificativ odată cu modificările sarcinii. Această caracteristică se numește moale.
Orez. 29.9. Motor de excitație secvențială:
A- schema circuitului; b- caracteristici de performanta; c - caracteristici mecanice; 1 - caracteristică naturală; 2 - caracteristică artificială
Odată cu o scădere a sarcinii motorului cu excitație secvențială, viteza de rotație crește brusc și, la o sarcină mai mică de 25% din valoarea nominală, poate atinge valori periculoase pentru motor („depășire ”). Prin urmare, funcționarea unui motor cu excitație în serie sau pornirea acestuia cu o sarcină pe arbore mai mică de 25% din valoarea nominală este inacceptabilă.
Pentru o funcționare mai fiabilă, arborele motorului cu excitație secvențială trebuie să fie conectat rigid la mecanismul de lucru prin intermediul unui cuplaj și al unui angrenaj. Utilizarea unei transmisii prin curea este inacceptabilă, deoarece dacă cureaua este ruptă sau resetată, motorul se poate „scăpa”. Având în vedere posibilitatea de a funcționa motorul la turații crescute, motoarele cu excitație în serie, conform GOST, sunt testate timp de 2 minute pentru a depăși viteza cu 20% peste maximul indicat pe plăcuța de identificare, dar nu mai puțin de 50% peste valoarea nominală.
Caracteristici mecanice motor de excitație în serie n=f(M) sunt prezentate în fig. 29,9, în. Curbe în scădere bruscă ale caracteristicilor mecanice ( natural 1 și artificial 2 ) asigură motorului cu excitație secvențială funcționare stabilă sub orice sarcină mecanică. Capacitatea acestor motoare de a dezvolta un cuplu mare proporțional cu pătratul curentului de sarcină este importantă, mai ales în condiții dificile de pornire și în timpul supraîncărcărilor, deoarece odată cu creșterea treptată a sarcinii motorului, puterea la intrarea acestuia crește mai lent. decât cuplul. Această caracteristică a motoarelor cu excitație în serie este unul dintre motivele lor aplicare largă ca motoare de tracțiune în transport, precum și motoare de macara în instalațiile de ridicare, adică în toate cazurile de acționare electrică cu condiții dificile de pornire și o combinație de sarcini semnificative pe arborele motorului cu o turație redusă.
Modificarea vitezei nominale a motorului de excitație în serie
 , (29.16)
, (29.16)
Unde n - viteza de rotatie la o sarcina motorului de 25% din nominala.
Viteza de rotație a motoarelor cu excitație în serie poate fi controlată prin schimbarea fiecăreia tensiune U, sau fluxul magnetic al înfăşurării de excitaţie. În primul caz, o ajustare reostat R rg (Fig. 29.10, A). Odată cu creșterea rezistenței acestui reostat, scade tensiunea la intrarea motorului și frecvența de rotație a acestuia. Această metodă de control este utilizată în principal la motoarele de putere mică. În cazul unei puteri semnificative a motorului, această metodă este neeconomică din cauza pierderilor mari de energie în R rg . In afara de asta, reostat R rg , calculat pe curentul de funcționare al motorului, se dovedește a fi greoi și costisitor.
Când mai multe motoare de același tip lucrează împreună, viteza de rotație este reglată prin schimbarea schemei de includere a acestora unul față de celălalt (Fig. 29.10, b). Deci, atunci când motoarele sunt conectate în paralel, fiecare dintre ele este sub tensiune de rețea completă, iar când două motoare sunt conectate în serie, fiecare motor reprezintă jumătate din tensiunea rețelei. Odată cu funcționarea simultană a unui număr mai mare de motoare, este posibil un număr mai mare de opțiuni de comutare. Această metodă de control al vitezei este utilizată la locomotivele electrice, unde sunt instalate mai multe motoare de tracțiune identice.
Este posibilă schimbarea tensiunii furnizate motorului atunci când motorul este alimentat de la o sursă de curent continuu cu tensiune reglată (de exemplu, conform unui circuit similar cu Fig. 29.6, A). Odată cu scăderea tensiunii furnizate motorului, caracteristicile sale mecanice se deplasează în jos, practic fără a le modifica curbura (Fig. 29.11).
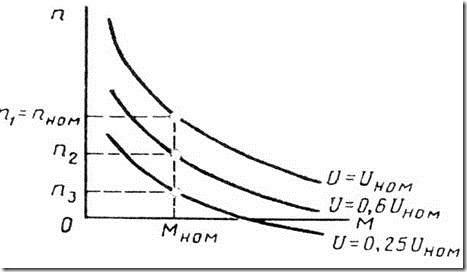
Orez. 29.11. Caracteristicile mecanice ale unui motor cu excitație în serie cu o modificare a tensiunii de intrare
Există trei moduri de a regla turația motorului prin modificarea fluxului magnetic: prin manevrarea înfășurării de excitație cu un reostat r rg , secționând înfășurarea de excitație și manevrarea înfășurării armăturii cu un reostat r w . Pornirea reostatului r rg , manevrarea înfăşurării de excitaţie (Fig. 29.10, în), precum și o scădere a rezistenței acestui reostat duce la o scădere a curentului de excitație Eu în \u003d I a - I rg , și în consecință, la o creștere a vitezei de rotație. Această metodă este mai economică decât cea anterioară (vezi Fig. 29.10, A), este folosit mai des si este estimat prin coeficientul de reglare
 .
.
De obicei, rezistența reostatului r rg luată astfel încât krg >= 50% .
La secţionarea înfăşurării câmpului (Fig. 29.10, G) oprirea unei părți din spirele înfășurării este însoțită de o creștere a vitezei de rotație. La manevrarea înfășurării armăturii cu un reostat r w (vezi fig. 29.10, în) creste curentul de excitatie I în \u003d I a + I rg , ceea ce determină o scădere a vitezei de rotație. Această metodă de reglare, deși oferă o reglementare profundă, este neeconomică și este folosită foarte rar.
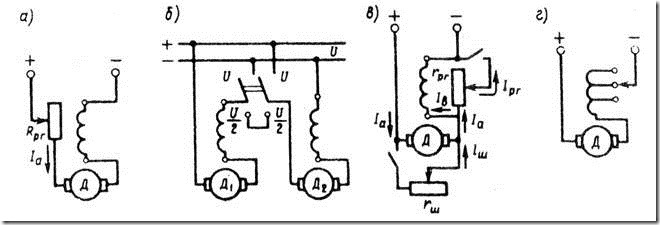
Orez. 29.10. Reglarea vitezei de rotație a motoarelor cu excitație în serie
Vă sfătuim să citiți
, diagnostic, tratament Tratamentul chlamydia urogenitală") Chlamydia urogenitală - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenitală
Chlamydia urogenitală - descriere, cauze, simptome (semne), diagnostic, tratament Tratamentul chlamydia urogenitală Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce
Beneficiile și semnificația hidroaminoacidului treoninei pentru corpul uman L treonina ce A aștepta sau nu a aștepta un tip din armată Din ce motiv pot fi comandați din armată
A aștepta sau nu a aștepta un tip din armată Din ce motiv pot fi comandați din armată Mere coapte cu brânză de vaci Mere coapte cu brânză de vaci
Mere coapte cu brânză de vaci Mere coapte cu brânză de vaci

