I mange tilfeller brukes trefase asynkronmotorer for frekvensomformere som ikke krever hastighetsregulering. Men asynkronmotorer har verdifulle fordeler: pålitelighet, lav pris, enkel design, høy effektivitet og relativt lav vekt. Av disse grunnene er det naturlig å prøve å bruke dem på stasjoner med variabel hastighet også.
Vi trenger mer spesifikk informasjon om hva ditt ønskede sluttresultat er. merke; Det er flere måter å øke hastigheten på trefase motor. Et mindre invasivt middel ville være å legge til en variabel frekvensomformer, noen ganger kalt en hastighetsomformer. Husk at når hastigheten øker, reduseres dreiemomentet hvis du overskrider motorens nominelle hastighet. Vi hjelper deg gjerne med å finne ut hvilken av disse tilnærmingene som passer best for din applikasjon. Hvis motoren din har en sentrifugalbryter i startkretsen, kan du ikke øke motorhastigheten mye.
- Dette er et ganske generelt spørsmål.
- Hvis du trenger Tilleggsinformasjon, Ring oss.
For å kontrollere hastigheten til asynkronmotorer med en ekorn-burrotor, brukes vanligvis frekvenskontrollmetoden, som er en jevn hastighetskontroll magnetfelt ved å regulere frekvensen til strømmen i statorviklingene, og metoden for å endre antall polpar av et roterende magnetfelt, hvor rotasjonsfrekvensen til magnetfeltet endres brått.
Vil problemet være at den elektriske motoren går veldig lavt ved 300rpm? Til og med høyden du bruker motoren i har betydning, da luften i større høyder er mindre tett og derfor ikke gir den samme kjøleeffekten. I fjellområder kan det være nødvendig å redusere belastningen selv ved full hastighet for å sikre tilstrekkelig motorkjøling. Spesifikasjonene til din applikasjon vil mest sannsynlig kreve bruk av en høyeffektiv motor og konstant hastighetsvifte. Kostnaden for en hjelpevifte vil avhenge av størrelsen på motorrammen og kan til og med kreve noe fabrikasjon for å finne ut hvordan den skal monteres. Takk for alle råd du kan gi meg!
For å kontrollere rotasjonshastigheten til asynkronmotorer med en faserotor, brukes metoden for reostatisk kontroll, som er en jevn kontroll av rotorslipingen ved å endre den aktive motstanden til faseviklingene.
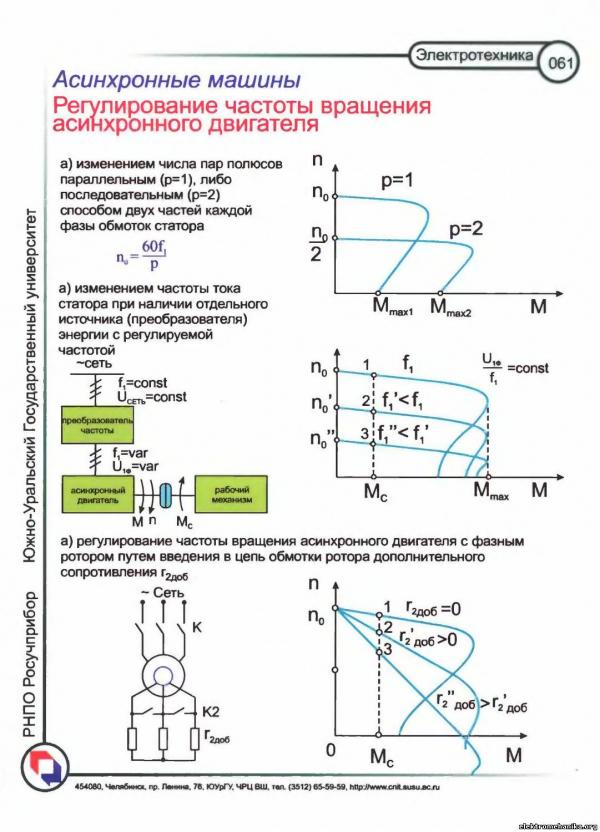
Frekvensregulering. Den mest lovende metoden for hastighetskontroll induksjonsmotor er stator AC frekvensregulering motor. Vinkelhastigheten til rotasjonsfeltet n = 2 f/r. Derfor, når strømfrekvensen f endres, endres vinkelhastigheten til feltet proporsjonalt. Men når man utfører frekvensstyring av strømmen, må det tas hensyn til at samtidig spenningsstyring er nødvendig. Dette skyldes det faktum at, i samsvar med uttrykk (14.10), fasens EMF, og dermed forsyningsspenningen, er proporsjonale med strømfrekvensen og strømningen. Siden fluksen må forbli den samme i alle moduser, må spenningen være (uten å ta hensyn til spenningsfallet i maskinen) proporsjonal med frekvensen. I tillegg er dette nødvendig slik at når motorhastigheten endres, endres ikke dreiemomentet.
flerpunkt enfase motor er faktisk ikke en flerhastighetsmotor, det er en flerspenningsmotor. Ved å bruke viklingskraner for å øke motstanden i kretsen, svekkes motoren og belastningen får motoren til å bremse ned. Fjern lasten og motoren vil gå med samme hastighet uavhengig av valgt kran. Hvis motoren brukes som viftemotor, kan en reostat legges til inngangsledningen ved å legge til en ekstern motstand og dempe motoren for å få ønsket hastighet. Hvis du foretrekker spesifikke hastigheter i stedet for en rekke hastigheter, kan du legge til prøve- og luftmotstandsmål. Bare husk at hvis arbeidsmengden endres, vil hastigheten også endre seg. Kan vi endre polen til 3-fase induksjonsmotoren?
For å vurdere arten av avhengigheten til dreiemomentet på frekvensen til strømmen i statorviklingene og på spenningen på den, neglisjerer vi i ligning (14.28) den aktive motstanden til statorviklingen g l Og induktive reaktanser spredning av statorviklingene x pac 1 og rotor x ras 2 og bruk uttrykket for slip-frekvensen (14.13):
Mvr= = A,
Fortell meg konsekvensene. Ja, du kan spole viklingen på nytt for å endre de magnetiske polene, men når du gjør det, må du endre noen få andre egenskaper ved viklingen. For å øke antall poler, må du endre rekkevidden, ledningsstørrelsen og svingene per spole for å holde bakjernet og tannens magnetiske flukstetthet på normale standarder. Ved å opprettholde samme antall omdreininger svekker du motoren, og reduserer dens evne til å produsere dreiemoment. Induksjonsmotor med ekorn-burrotor skaper en flott generator når den beveger seg over sin synkrone hastighet.
Hvor EN= konst.
Derfor, når du endrer frekvensen til strømmen, for å opprettholde dreiemomentet konstant, er det nødvendig å proporsjonalt endre spenningen på statoren; med andre ord vil betingelsen for å opprettholde et konstant motormoment under frekvensregulering være U 1 /f= konst. Hvis du justerer frekvensen til strøm og spenning, observerer den spesifiserte tilstanden, vil de mekaniske egenskapene til motoren forbli stive, og maksimalt øyeblikk nesten uavhengig av frekvens (den avtar betydelig bare ved en relativt lave frekvenser). Samtidig vil effekten endres proporsjonalt med frekvensen til strømmen, siden P 2 = M vr. For eksempel, når strømfrekvensen reduseres med en faktor på 2, halveres også motoreffekten på akselen.
De samme egenskapene som gjør denne motoren ønskelig fremfor andre typer motorer, gjør induksjonsgeneratoren ønskelig fremfor andre typer generatorer, nemlig den iboende styrken til ekornrammens design og enkelheten til kontrollsystemene.
En induksjonsmotor blir en generator når den kobles til strømnettet og deretter drives over sin synkrone hastighet av en eller annen drivkraft. Den første motoren kan være en turbin, en motor, en vindmølle eller noe som helst som kan gi dreiemomentet og hastigheten som trengs for å drive motoren inn i en overhastighetstilstand.
Regulering ved å endre antall stolper. En trinnvis endring i vinkelhastigheten til en induksjonsmotor over et bredt område er mulig på bekostning av å komplisere og øke kostnadene ved utformingen av en induksjonsmotor - dette er regulering ved å bytte antall polpar av motoren.
Ved en konstant nettverksfrekvens avhenger vinkelhastigheten til et roterende felt bare av antall polpar i dette feltet, bestemt av statorviklingen. Hvis to separate viklinger er plassert på statoren - danner en R damp, og den andre danner R" par av poler, ved å inkludere den første eller andre viklingen i nettverket, vil vi oppnå feltrotasjonsfrekvensen:
Ytelsen som generator vil være litt annerledes enn den som brukes som motor. Forskjellene kan være så små at de ikke kan detekteres med konvensjonelle feltmålingsmetoder. Den største fordelen med induksjonsgeneratoren er frekvensregulering. Hastigheten må kontrolleres synkron generator slik at dens frekvens ikke avviker fra den lineære frekvensen. Utgangsfrekvens og volt styres av kraftsystemet i induksjonsgeneratorer og er uavhengig av hastighetsendringer.
N 1 \u003d 60f / p eller n" 1 = 60f/p", derfor,
n1/p" 1 =p"/p,
motorens rotorhastigheter vil også variere tilsvarende. I dette tilfellet må viklingen av motorrotoren gjøres som et ekornhjul.
Antall poler til statorviklingene i dette tilfellet er gjensidig urelatert og kan velges hvilken som helst, avhengig av driftsforholdene til motoren. Selve reguleringen reduseres til en brå endring i motorfeltets rotasjonsfrekvens. Men rotorhastigheten kan ikke endres brått på grunn av tregheten til hele det elektriske drivsystemet. Først etter veksling begynner den tilsvarende endringen i rotorhastigheten.
Den selvregulerende effekten minimerer kompleksiteten til kontrollsystemet. Induksjonsgeneratorregulatorer er svært like de som brukes til en induksjonsmotor, med noen få unntak. Ved tap av elektrisk belastning vil drivmotorens dreiemoment raskt akselerere systemet til potensielt farlige hastigheter. En brems, regulator eller gass er nødvendig for å forhindre farlige hastigheter. Elektrisk bryter må være utstyrt for å begrense strømmen kortslutning. Ved kortslutningsfeil i kraftsystemet leverer generatoren en feilstrøm. Vanligvis strømbegrensende sikringer. Dreiemomentet til drivmotoren må begrenses for å hindre at generatoren blir overbelastet. Denne kontrollen kan være relatert til utformingen av drivmotoren eller kan være basert på tilbakemeldingssignaler fra generatorutgangen. I et ekstremt tilfelle kan drivmotoren presse generatorens dreiemoment, og forårsake en løpende hastighet. I noen tilfeller kan hastigheten til drivmotoren falle under generatorens synkronhastighet. Hvis dette skjer, vil generatoren bli drevet for å betjene systemet. Hvis en slik respons ikke er ønsket, kan strømmen kuttes med et reverseringsrelé, eller en overbelastningsclutch kan brukes for å la motoren gå uten belastning. Systemet skal være utstyrt med fartsbegrenser. . En induksjonsgenerator kan brukes som en motor for å akselerere systemet til driftshastighet, eller en drivkraft kan brukes for å gi akselerasjon.
For å vise denne forbigående prosessen tydeligere, konstruerer vi to mekaniske egenskaper asynkron maskin med et variabelt antall polpar: en karakteristikk som tilsvarer R par av stolper, og den andre p" = 1p par av stolper (henholdsvis Fig. 14.31, EN Og b). La oss anta at momentet på motorakselen forblir konstant når felthastigheten endres. Med en økning i sistnevnte, dvs. med overgang fra R" Til R par av poler, befinner motoren seg først i forhold nær start, og det oppstår en strømstøt.
I sistnevnte tilfelle er det ikke nødvendig å ta hensyn til startøyeblikket og strømmen i utformingen av maskinen. Dette gjør at designeren kan få maksimal ytelse ved full belastning. Induksjonsgeneratoren blir i økende grad brukt som et middel for å gjenvinne energi som ellers ville vært bortkastet. Den genererte strømmen kan forbrukes på stedet eller selges til forsyningssystemet som forsyner stedet. For å konvertere denne energien til elektrisk energi vind- og vanngeneratorer brukes.
Noen typiske bruksområder for induksjonsgeneratorer. Ved dampfeil kan generatoren brukes som motor for å drive pumpen. I tillegg vil pumpen forhindre at systemet går over hastighet ved bortfall av elektrisk belastning. Vannselskapet mener at de kan kjøpe strøm til lave priser om natten og selge strøm til høye priser i toppperioden på dagtid. Han bygger lave og høye lagertanker og installerer flere pumper. Om natten pumper han vann fra det lave bassenget til det høye bassenget, og kjøper strøm fra verktøyet. I høye perioder strømmer vann tilbake gjennom pumpene, og driver motorene som generatorer. Strøm selges til kraftverk. Denne kretsen er så enkel at den kan fjernstyres. Vinden blåser konstant mellom ørkenen og fjellene i California. En driftig mann skapte flere tårn med vindmøller som styrer induksjonsgeneratorer gjennom girkasser. Kraft genereres i forhold til vindhastighet og selges til et lokalt kraftverk. Tilfeldig bruk av induksjonsmotorer som generatorer bør unngås. Det er mulig at en bestemt motor ikke vil fungere godt som generator på grunn av intern magnetisk metning. Indre stress som en generator kan være høyere enn som en motor med samme klemmespenning. De magnetiske tetthetene i en maskin bestemmes av spenningen i det ekvivalente luftgapet. Det er over høyspenning i luftgapet kan føre til overdreven metning av maskinen, samt høye kjernetap og økte magnetiseringsstrømmer. Det kan antas at maskinen kan overopphetes ved svært lav belastning. Hvis en induksjonsmotor brukes som generator, må denne informasjonen være kjent for designeren slik at han kan ta passende hensyn til magnetiske tettheter. Induksjonsmotorer er vanligvis vurdert til 460 volt for bruk på et 480 volt system. Induksjonsgeneratorer må vurderes for systemspenningsklassifisering eller litt høyere, ikke lavere, da generatoren nå er strømkilden og ikke belastningen på kraftsystemet. Effekan brukes til å korrigere effektfaktoren til en generator på samme måte som for en induksjonsmotor. Men hvis det er en mulighet for at generatoren kan gå for høyt, enten den er koblet til strømsystemet eller ikke, må kondensatorene kobles til systemet gjennom en separat bryter, slik at når generatorbryteren åpnes, vil kondensatorene ikke kobles til generatoren. Under overhastighetsforhold kan kondensatorer overbelaste generatoren og forårsake ukontrollert høyspenning. Disse spenningene kan ødelegge generatorens isolasjonssystemer og kan også være farlige for annet utstyr og personell. Papirfabrikken har et betydelig lager av tilgjengelig brensel i bark og skrap. . Induksjonsgeneratorer er designet for spesifikke bruksområder og ikke for generell bruk.
Men når man flytter fra R Til R", dvs. med en reduksjon i rotasjonsfrekvensen til feltet, befinner maskinen seg først i forholdene til en generatormodus og fungerer, og gir energi til nettverket.
Denne modusen brukes noen ganger for rask og økonomisk bremsing av stasjonen.
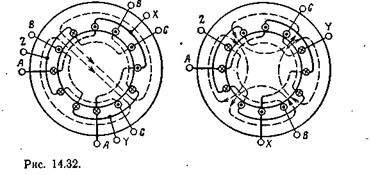
To separate viklinger leveres kun til statorene for laveffektsmotorer; for motorer med høy effekt er det mer hensiktsmessig å bytte spoler med samme vikling for å oppnå et annet antall polpar. På fig. 14.32 viser koblingskretsen trefase vikling fra to til fire poler. Å bytte viklingen i et annet forhold enn 1:2 krever en mer kompleks kretsendring og er mindre vanlig.
Ta kontakt med din lokale distributør eller salgsrepresentant for å sende inn en teknisk forespørsel. Kun de som kjenner forskjellene kan allerede velge riktig styringsmetode når de skal designe en stasjon – og dermed holde kostnadene så lave som mulig.
Når du designer et elektrisk drivsystem, er det avgjørende å bestemme presisjonskravene for applikasjonskontroll. Hvis kravene er transparente og spesifisert, kan drivsystemet sammenstilles og justeres med nødvendige komponenter. Hovedmålet er å velge de riktige komponentene med spesifikke kontrollkvalitetskrav på en kostnadsoptimalisert måte – dette er den eneste måten å unngå unødvendige utgifter hvis for eksempel kravene ble vurdert for høyt eller for lavt.
I de fleste tilfeller leveres statoren til en asynkron maskin med to uavhengige viklinger, som hver er byttet i forholdet 1: 2 eller på annen måte. Dermed har motoren fire hastighetstrinn, for eksempel 3000, > 1500, 1000 og 500 o/min.
Reostatisk regulering. I trefasede asynkronmotorer med faserotor brukes en reostatisk metode for å kontrollere rotorhastigheten. Dette oppnås ved å innføre en justerbar trefasereostat i kretsen til rotorens faseviklinger, som ved start av motoren (fig. 14.24). Men denne reostaten må være designet for en langtidsbelastning av rotorstrømmen, og ikke for en korttidsbelastning, som en startreostat. En økning i den aktive motstanden til rotorkretsen endrer karakteristikken M(s) - gjør den mykere (se fig. 14.25). Hvis, ved et konstant dreiemoment på motorakselen, økes den aktive motstanden til rotorkretsen ved gradvis å øke motstanden til reostaten (r p1< rs2< r р3), то рабочая точка будет смещаться с одной кривой M(er) til neste, tilsvarende den økte motstanden til rotorkretsen (fig. 14.25, punkter 1-4), i henhold til hvilken slipingen vil øke, og følgelig vil motorhastigheten reduseres.
På denne måten er det mulig å endre rotorhastigheten i området fra nominelt til fullt stopp. Men med denne reguleringsmetoden er relativt store energitap uunngåelige (se § 14.11). Roterende feltkraft R vr, s uten å ta hensyn til energitapene i statorkjernen, består den (se fig. 14.20) av effekttapene i lederne til rotorviklingen (se den tilsvarende kretsen i fig. 14.19);
R pr2 \u003d r "in2 (I" 2) 2
P fur \u003d r "i 2 (I" 2) 2.
Holdning
R pr 2 / R mek \u003d s / (l -s) \u003d (n 1 - n)/n
viser at deling av den mekaniske kraften avtar i direkte proporsjon med reduksjonen i rotorhastigheten, samtidig øker andelen effekttap i den aktive motstanden til rotorkretsen tilsvarende. Derfor, for å redusere motorhastigheten, for eksempel med 25%, er det nødvendig å inkludere en reostat i rotorkretsen med en slik aktiv motstand, der en fjerdedel av energien til det roterende magnetfeltet vil bli ubrukelig omdannet til varme. Ulempen med slik regulering kan også være det faktum at inkluderingen av en reostat i rotorkretsen gjør mekaniske egenskaper motoren er mykere, og reduserer derfor stabiliteten til hastigheten. Når reostaten er på, forårsaker små endringer i belastningen på akselen betydelige endringer i motorturtallet.
Det er posisjoner i elektriske installasjoner når du ikke klarer deg uten en likestrømsmotor. Det er denne elektriske motoren som kan justeres i henhold til rotasjonshastigheten til rotoren, som kreves i elektriske installasjoner. Riktignok har den mange mangler, og en av dem er den raske slitasjen på børstene hvis de ble installert med en krumning, og levetiden deres er ganske lav. Når den er slitt, oppstår det gnister, så en slik motor kan ikke brukes i eksplosive og støvete rom. Pluss en elektrisk motor likestrøm det koster dyrt. For å endre denne situasjonen, bruk en asynkronmotor og en frekvenskontroller for en asynkronmotor.
På nesten alle måter er elektriske motorer som opererer på vekselstrøm overlegne analoger på likestrøm. For det første er de mer pålitelige. For det andre har de mindre dimensjoner og vekt. For det tredje er prisen lavere. For det fjerde er de lettere å betjene og koble til.
Men de har en ulempe - dette er kompleksiteten ved å regulere hastigheten. I dette tilfellet vil ikke standardmetodene for å kontrollere frekvensen til asynkronmotorer fungere her, nemlig å endre spenningen, stille inn motstanden og så videre. Frekvenskontroll av en asynkron elektrisk motor var problemet nummer én. Selv om det teoretiske grunnlaget har vært kjent siden trettiårene av forrige århundre. Det hele kokte ned til kostnad. frekvensomformer. Alt endret seg da mikrokretser ble oppfunnet, ved hjelp av disse ble det mulig å sette sammen en frekvensomformer gjennom transistorer til en minimumskostnad.
Reguleringsprinsipp
Så måten å kontrollere hastigheten til en induksjonsmotor på er basert på én formel. Her er hun under.
ω=2πf/p, hvor
- ω er vinkelhastigheten for rotasjon av statoren;
- f er inngangsspenningsfrekvensen;
- p er antall polpar.
Det vil si at det viser seg at det er mulig å endre rotasjonshastigheten til den elektriske motoren bare ved å endre spenningsfrekvensen. Hva gir det i praksis? Den første er den jevne driften av motoren, spesielt når du starter utstyret, når selve motoren kjører under de høyeste belastningene. Den andre er økt slip. På grunn av dette øker effektiviteten, og tapet av kraftkarakteristikk reduseres.
Strukturen til frekvensregulatoren
Alle moderne frekvensomformere er bygget etter prinsippet om den såkalte dobbeltkonverteringen. Det er, vekselstrøm konverteres til DC gjennom en ukontrollert likeretter og filter. Videre, gjennom en pulsomformer (den er trefaset), finner den omvendte konverteringen av likestrøm til vekselstrøm sted. Selve omformeren består av seks strømbrytere (transistor). Så hver vikling av den elektriske motoren er koblet til visse likeretternøkler (positive eller negative). Det er omformeren som endrer frekvensen til spenningen som påføres statorviklingene. Faktisk er det gjennom den at frekvensreguleringen av den elektriske motoren skjer.

I denne enheten er krafttransistorer installert ved utgangen. De fungerer som nøkler. Hvis vi sammenligner dem med tyristorer, bør det bemerkes at førstnevnte genererer et signal i form av en sinusoid. Det er denne formen som skaper minimal forvrengning.
Nå er selve prinsippet om drift av frekvensomformeren. For å forstå dette, foreslår vi å demontere figuren nedenfor.
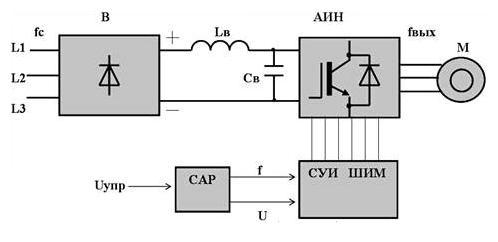
Så, la oss gå gjennom bildet, hvor
- "B" er en ukontrollert diode-type likeretter.
- "AIN" er en autonom omformer.
- "SUI PWM" - et system for pulsbreddekontroll.
- "SAR" - automatisk kontrollsystem.
- "Sv" - filterkondensator.
- "Lv" - gass.
Diagrammet viser veldig tydelig at omformeren regulerer spenningsfrekvensen på grunn av pulsbreddekontrollsystemet (det er høyfrekvent). Det er denne delen av regulatoren som er ansvarlig for å koble statorviklingene til den elektriske motoren vekselvis til den positive polen til likeretteren, deretter til den negative. Frekvensen av tilkobling til polene skjer langs en sinusformet kurve. I dette tilfellet bestemmes pulsfrekvensen nøyaktig av PWM-frekvensen. Slik fungerer frekvensregulering.

 - bruksanvisning Dexalgin hvordan du tar")



