For mengden dreiemoment induksjonsmotor faseforskyvningen mellom strømmen I 2 og e har stor innflytelse. d.s. E 2S rotor.
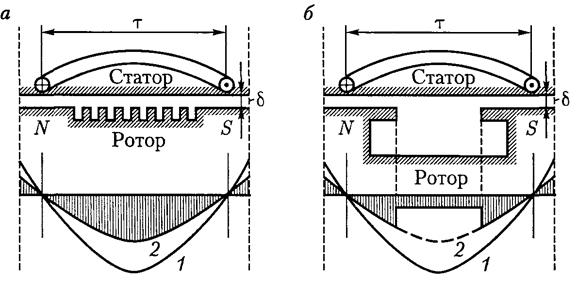
Tenk på tilfellet når induktansen til rotorviklingen er liten og derfor faseforskyvningen kan neglisjeres (fig. 223, a).
Det roterende magnetfeltet til statoren er her erstattet av feltet til N- og S-polene, roterende, la oss si, i retning med klokken. Ved å bruke høyrehåndsregelen bestemmer vi retningen e. d.s. og strømmer i rotorviklingen. Rotorstrømmer, som samhandler med et roterende magnetfelt, skaper et dreiemoment. Retningen til kreftene som virker på strømførende ledere bestemmes av venstrehåndsregelen. Som det fremgår av tegningen, vil rotoren under påvirkning av krefter rotere i samme retning som selve rotasjonsfeltet, det vil si med klokken.
Og ankeret er også en laminatenhet, vanligvis plassert på en aksel. Spolebørste magnetbryter Fig. En enkelt vikling er installert mellom motsatte poler av en enkel magnet. Når spolen er vertikalt innrettet, er den vanlige strømmen av elektroner fra den positive til den negative terminalen. Fôret er laget av børster som er i kontakt med segmentene. bytte om. Fra Faradays lov om elektromagnetisk induksjon - venstrehåndsregelen. toppen av spolen vil bli utsatt for en kraft fra høyre til venstre.
Tenk på det andre tilfellet, når induktansen til rotorviklingen er stor. I dette tilfellet vil faseforskyvningen mellom rotorstrømmen I 2 og e. d.s. rotor E 2S vil også være stor. I fig. 223, b, er magnetfeltet til statoren til en induksjonsmotor fortsatt vist i form av med klokken roterende poler N og S. Retningen til f.eks. d.s. forblir den samme som i fig. 223, a, men på grunn av forsinkelsen av strømmen i fase, aksen magnetfelt rotoren vil ikke lenger falle sammen med den nøytrale linjen til statorfeltet, men vil forskyves med en viss vinkel mot rotasjonen av magnetfeltet. Dette vil føre til at sammen med dannelsen av et dreiemoment rettet i én retning, vil noen ledere skape et motsatt dreiemoment.
Den nedre delen vil bli utsatt for kraft i motsatt retning. Siden spolen er designet for å rotere, vil disse kreftene skape et dreiemoment som vil få spolen til å rotere mot klokken. Bryterens rolle er å sikre strømmen av elektroner. alltid i riktig retning ettersom hver side av spolen markerer stavene dine. Bryteren inkluderer segmenter av bronse skilt fra myggisolerende ark. Kullbørstene får kontakt med en bryter.
Rotasjonsvinkel Momentendring under rotasjon. Hvis to 90° omdreininger brukes i kombinasjon med to separate magneter også ved 90°, er utgangsmomentet praktisk talt konstant. Ved å introdusere en andre spole trenger kommutatoren fire separate segmenter.
Det kan ses av dette at motorens totale dreiemoment under et faseskift mellom strøm og e. d.s. rotoren er mindre enn for tilfellet når I 2 og E 2S er i fase. Det kan bevises at dreiemomentet til en induksjonsmotor bare bestemmes av den aktive komponenten av rotorstrømmen, det vil si strømmen I 2 cos, og at det kan beregnes med formelen:
Totaltap gjennom bryteren skyldes både mekanisk friksjon og håndspenning. Begge tapene er imidlertid små hvis motoren er utstyrt med vifte. Synkronmotorer Synkronmotorer kalles slik fordi de opererer med en enkelt hastighet, det vil si rotasjonshastigheten til magnetfeltet. Produksjonen av et roterende magnetfelt kan utføres. ved bruk av tre statorspoler fordelt på 120° drevet av trefasestrøm. Rotasjonshastigheten til feltet avhenger av frekvensen til strømmen.
Den mekaniske utformingen er skjematisk vist i fig. Momentkarakteristikk for en synkronmotor. Det roterende magnetiske feltet indusert av statoren og rotorspolene, som kan sammenlignes med en stang-type permanent magnet som er på linje med den enkelt roterende fluksen som produseres i statoren. Når akselen aktiveres mekanisk, fjernes feltet generert av rotoren fra innretting med feltet generert av statoren. Kjennetegn synkrone motorer vanligvis presentert som variasjoner. Det kan sees av ligningen ovenfor at synkronmotorer ikke har startmoment og rotoren må roteres til synkron hastighet på andre måter.
Ф m - statormagnetisk fluks (og også omtrent lik den resulterende magnetiske fluksen til induksjonsmotoren);
Fasevinkel mellom e. d.s. og viklingsfasestrøm
C er en konstant koeffisient.
Etter bytte:
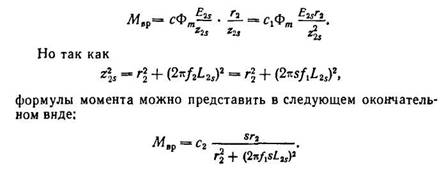
Fra det siste uttrykket kan man se at dreiemomentet til induksjonsmotoren avhenger av slipingen.
Fordelene med en synkronmotor er den enkle effektfaktoren kan kontrolleres. konstant rotasjonshastighet, uavhengig av påført belastning. Induksjonsmotorer Stator Induksjonsmotor ligner generator vekselstrøm og hvis bilen drives av strøm, produserer den en roterende magnetisk fluks. Rotoren kan være bur eller med sleperinger.
Skjematisk fremstilling av en induksjonsmotor. I en rammemotor er rotoren laminert og lederne har blanke eller blanke kobberstenger. aluminium mates gjennom sporene på rotoren. Stenger sveises i hver ende med ringer eller plater for å lage korte trådbunter. Skyvemaskinen har en laminert kjerne og trefase vikling, lik en stator, og koblet til tre ringer på akselen. Et skjema over en induksjonsmotor er vist med tre statorspoler med en avstand på 120° fra hverandre.
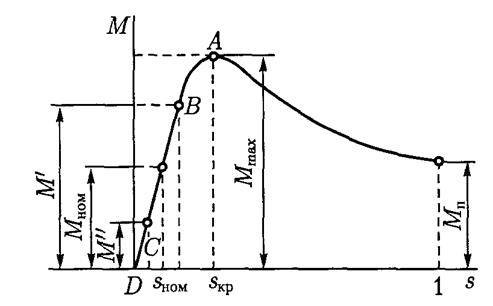
I fig. 224 viser kurve A for motordreiemoment versus slip. Det kan sees av kurven at i startøyeblikket, når s=l og n = 0, er motormomentet lite. Dette forklares av det faktum at i startøyeblikket er frekvensen av strømmen i rotorviklingen høyest og den induktive motstanden til viklingen er stor. Som et resultat har cos en liten verdi (fordi
Hvis statorspolene drives av en trefasestrøm, dannes et roterende magnetfelt i statoren. Figuren viser en enkelt rotorspole. I hvile vil rotasjonsfeltet indusere en spenning i rotorklokken når strømmen endres. Hvis spolen danner en lukket sløyfe, vil den induserte EMF-kraften indusere en strøm i spolen. Den resulterende kraften på lederen som strømmen går gjennom vil resultere i et øyeblikk, som vil være. få fart på rotoren. Rotorhastigheten vil øke til det elektromagnetiske dreiemomentet er balansert. til øyeblikket av mekanisk lasting.
|
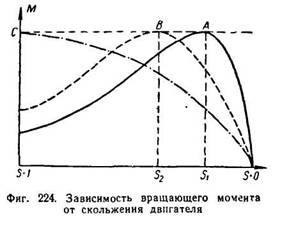
rad 0,1-0,2). Derfor, selv om startstrømmen er stor, vil startmomentet være lite.
Med noe slip S 1 vil motormomentet ha en maksimal verdi. Med en ytterligere reduksjon i slip, eller med andre ord, med en ytterligere økning i motorens rotasjonshastighet, vil dreiemomentet raskt avta.
En induksjonsmotor vil aldri nå synkron hastighet, siden det ville være relativ bevegelse mellom rotoren og rotasjonsfeltet til spolene, og dette ville indusere ingen elektromagnetiske EMF-krefter i rotorspolene og dermed ikke noe elektromagnetisk dreiemoment. Derfor kjører induksjonsmotorer alltid med en hastighet som er litt lavere enn den synkrone hastigheten.
Moment-moment-funksjonen er vist på figuren. Fulladet moment Glidende moment Fig. Momentkarakteristikk for en asynkronmotor. Når rotorhastigheten er lik synkron, = 0, er dreiemomentet null. Hvis rotorhastigheten faller under synkronisme, øker dreiemomentet tilnærmet lineært til en maksimal verdi bestemt av den totale belastningstiden og krever overskytende tap gjennom rotoren. En induksjonsmotor kan betraktes som en maskin med konstant hastighet. Faktisk er vanskeligheten med å endre hastigheten én. ulempe med en asynkronmotor.
For å forskyve og når s = 0, vil dreiemomentet til motoren også være lik null.
Det skal bemerkes at i en asynkronmotor kan en slip lik null praktisk talt ikke eksistere. Dette er kun mulig hvis rotoren er eksternt forsynt med et dreiemoment i rotasjonsretningen til statorfeltet.
Startmomentet kan økes hvis faseforskyvningen mellom strøm og e reduseres i startøyeblikket. d.s. rotor. Fra formelen
Problemer med asynkronmotorer. motorstart, motorbremsing, hastighetskontroll. Det kan også betraktes som en diskret, synkron versjon av motoren. Antall trinn som tas må samsvare med antall kontrollpulser som tilføres motorfasene. Rotasjonen utføres faktisk med et begrenset tidstrinn.
Når statorfasene påføres, genereres magnetiske felt som samhandler med de permanente magnetfluksene, og skaper dreiemomentkrefter som beveger rotoren. Fasemating utføres ved hjelp av polaritetspulser. interleaved, som kompliserer strukturen til kontrollenheten, kalt den bipolare kommandoen.
det kan sees at hvis, med en konstant induktiv motstand av rotorviklingen, den aktive motstanden økes, vil selve vinkelen reduseres, noe som vil føre til at motormomentet også vil øke. Dette brukes i praksis for å øke startmomentet til motoren. I startøyeblikket føres en aktiv motstand (startreostat) inn i rotorkretsen, som deretter fjernes så snart motoren øker turtallet.
Denne typen motor gir høyere motormoment og dreiemoment for å opprettholde rotoren selv i fravær av fasemating. Rotoren består av en aksialt magnetisert sylindrisk magnet. Vinkeltrinnet varierer fra 0,9 til -5°, men 1,8° er mest brukt.
Definisjon og konstruktive elementer. På en konvensjonell induksjonsmaskin skapes magnetfeltet av variabler elektriske strømmer. Viklingen av disse strømmene kalles primærvikling, som kan være enfase eller flerfase. Enfasemaskiner er bygget for lav effekt opp til noen få kilowatt. Konvensjonelle maskiner er trefasede.
Økning av startmomentet fører til at det maksimale dreiemomentet til motoren oppnås med mer slipp (punkt S2 i kurve B i FIG. 224). Ved å øke den aktive motstanden til rotorkretsen ved oppstart er det mulig å oppnå at maksimalt dreiemoment vil være i oppstartsøyeblikket (s = 1 kurve C).
Dreiemomentet til en induksjonsmotor er proporsjonalt med kvadratet av spenningen, så selv en liten reduksjon i spenning er ledsaget av en kraftig reduksjon i dreiemoment.
Den andre aktive delen av bilen er stedet der sekundærviklingen er plassert. Som regel fungerer den faste delen av maskinen som en induktor, og rotoren induseres. Den konvensjonelle induksjonsmaskinen er bygget i to former: induksjonsmaskiner med ringrotorer eller viklingsrotorer, hvor en flerfaset alternerende rotorvikling er koblet til sleperinger, og induksjonsmaskiner med en eller flere rotorer.
Den flerfasede induksjonsmaskinen kan fungere som en motor, generator eller elektromagnetisk brems. Den brukes i størst grad som motor og er den vanligste elektriske motoren på grunn av dens enestående kvaliteter, strukturelle enkelhet og sikre drift.
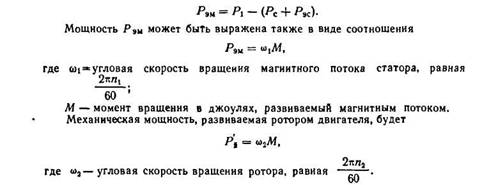
Strøm P 1 levert til statorviklingen til en induksjonsmotor er lik:
![]()
hvor m 1 er antall faser.
Motorstatoren har følgende energitap:
1) i statorviklingen R es. =m 1 I 1 2 r 1;
2) i statoren stål og hysterese og virvelstrømmer P C .
Kraften som tilføres rotoren er kraften til det roterende magnetfeltet, også kalt den elektromagnetiske kraften P eM .
Induksjonsmaskinen er bygget for spenninger opp til 10 kV, effekt fra noen få watt til titalls megawatt og fra flere hundre til hundre tusen omdreininger i minuttet. De nominelle dimensjonene er angitt på kjøretøyets indeksskilt. Det aktive strykejernet er en induksjonsmaskin som har en fast del, en stator, utstyrt med en mono eller trefase strøm, samt den bevegelige delen, rotoren.
Figur 1 viser en asynkronmotor med demontert veivaksel. I fig. 2 viser et lengdesnitt av en asynkron spolemotor med en spolerotor forsynt med ekorn-bur og børsteløfteinnretning på sleperingene. Induksjonsmaskinen har et konstant jern, som tas minst mulig og bestemmes av mekaniske hensyn. Bøsningen har verdier fra 0,2 til 2 mm, små verdier som tilsvarer maskiner med en effekt i størrelsesorden watt, og store verdier for kraftige maskiner med tøffe driftsforhold.
Den elektromagnetiske effekten er lik differansen mellom kraften som tilføres motoren og tapene i motorstatoren, dvs.
|
Forskjellen mellom Р eM og representerer de elektriske tapene i rotorviklingen Р eP, hvis vi neglisjerer tapene i rotorstålet på grunn av deres ubetydelighet (frekvensen av remagnetisering av rotoren er vanligvis veldig liten):
Vanlige biler med kraften til en vogn og store, kraftige biler med tunge forhold. Ryggene er halvlukkede. På maskiner med høyspenning kun åpne spor brukes, hvor spoler lages separat. Induksjonsmaskiner brukes nesten utelukkende i spoler og i to lag for å få et magnetfelt med et høyere harmonisk innhold minst mulig. Statorviklinger i to lag er ofte laget med kort stigning, og roterende to-lags rotorer med diametral stigning.
Innpakning i små til mellomstore bur gjøres ofte med rotorer med kort stigning og dobbeltlags diametral stigning. Transport i små og mellomstore kjøretøy utføres i stor skala i aluminium under trykk, samt i kobber, bronse eller messing.
Derfor er tapene i rotorviklingen proporsjonale med rotorens slip.
Hvis fra mekanisk kraft utviklet av rotoren, trekke fra de mekaniske tapene R mx på grunn av friksjon i rotorlagrene, friksjon på luft, etc., samt ytterligere tap R D som oppstår under belastning og på grunn av rotor-strøfelt, og tap forårsaket av: magnetiske feltpulsasjoner i statortennene og rotoren, så vil det være nyttig kraft på motorakselen, som vi betegner med P 2 .
Veivakselrotorer er enklere, sterkere og billigere enn ringringer, så når spesielle starthastigheter og endringer ikke er nødvendig, er de mye brukt i lav til middels kraftapplikasjoner. For å redusere støy brukes konvensjonelle slisser med størst mulig helling og skrånende mot generatorene, og ved mikromaskiner benyttes spesielle utforminger, for eksempel slisseløse rotorer bestående av flere radielle, aksiale eller tangentielle lag, hysteresemotorer og bolle- formede roterende motorer.
Effektiviteten til en induksjonsmotor kan bestemmes av formelen:

Fra det siste uttrykket kan man se at rotasjonsmomentet til en induksjonsmotor er proporsjonal med produktet av størrelsen på den roterende magnetiske fluksen, rotorstrømmen og cosinus til vinkelen mellom f.eks. d.s. rotoren og dens strøm,
Formen på bilen avhenger av typen bilkonstruksjon. Generelt har kjøretøy med lav til middels kraft skjoldmonterte kam som vist på figurene, mens store kjøretøy har separate statorer festet til en felles grunnplate. Små og mellomstore biler har vanligvis kulelager, mens store har glidende. Ved jevn kjøring brukes glidelagre også til små biler.
Støpejern og stål brukes som støpemateriale. Stål brukes både normalt og når de skal redusere vekten på en bil. Maskiner opp til 4 kW er ofte utstyrt med aluminiumshus. Induksjonsmaskinen fungerer i generator-, motor- eller bremsemodus i forhold til hastigheten til rotoren til rotoren i forhold til det synkrone magnetfeltet til det omvendte magnetfeltet. Når elektromagnetisk energi kommer inn i rotoren og mekanisk fungerer i friluft, oppstår motormodus.

Fra den ekvivalente kretsen til en asynkronmotor oppnås verdien av den reduserte rotorstrømmen, som vi gir uten bevis.
![]()
Den grafisk uttrykte avhengigheten av det elektromagnetiske momentet på slip kalles mekanisk karakteristikk induksjonsmotor (fig. 3.3).
Ris. 3.3. Mekanisk karakteristikk av asynkronmotor
En forenklet formel for å beregne det elektromagnetiske dreiemomentet til en induksjonsmotor (Kloss-formel) kan brukes til å bygge mekaniske egenskaper

I dette tilfellet bestemmes den kritiske glidningen av formelen
![]()
hvor λ m \u003d M max / M nom - overbelastningskapasitet til motoren.
Når du beregner den mekaniske karakteristikken, må det tas i betraktning at med glideverdier som overstiger den kritiske verdien, reduseres nøyaktigheten av beregningene kraftig. Dette skyldes en endring i parametrene til den ekvivalente kretsen til en asynkronmotor, forårsaket av magnetisk metning av statoren og rotortennene, og en økning i frekvensen av strømmen i rotorviklingen.
Formen på de mekaniske egenskapene til en induksjonsmotor avhenger i stor grad av størrelsen på spenningen som påføres statorviklingen U 1 (fig. 3.4) og den aktive motstanden til rotorviklingen r"2 (fig. 3.5).

Ris. 3.4. Spenningspåvirkning U 1 om de mekaniske egenskapene til induksjonsmotoren
Dataene gitt i katalogene for asynkronmotorer inneholder vanligvis ikke informasjon om parametrene til den ekvivalente kretsen, noe som gjør det vanskelig å bruke formler for å beregne det elektromagnetiske dreiemomentet. Derfor, for å beregne det elektromagnetiske øyeblikket, brukes ofte formelen

Ris. 3.5. Påvirkning av motstand r" 2 om de mekaniske egenskapene til induksjonsmotoren
De operasjonelle egenskapene til en induksjonsmotor bestemmes av dens ytelsesegenskaper: avhengigheten av rotasjonshastigheten n 2, akselmoment M 2, effektivitet og kraftfaktor cosφ 1 fra motorens nyttelast R 2 .
Ved beregning av parametrene for å bestemme ytelsen til induksjonsmotorer, brukes enten en grafisk metode basert på konstruksjonen av et kakediagram eller en analytisk metode.
Grunnlaget for å utføre noen av ytelsesberegningsmetodene er resultatene av åpen krets og kortslutningstester. Hvis motoren er designet, innhentes disse dataene i prosessen med beregningen.
Ved beregning av motstanden til motstander r ext, brukt i stator- eller faserotorkretser for å begrense startstrøm eller hastighetskontroll, bruk prinsippet: for denne spesielle asynkronmotoren, slip s proporsjonal med den aktive motstanden til rotorkretsen til denne motoren. I samsvar med dette, likestillingen
(r 2 + r ext) /s= r2/s ingen m,
Hvor r2- aktiv motstand til rotorens vikling ved driftstemperatur; s- skli når en motstand er satt inn i rotorkretsen med en motstand r ext.
Fra dette uttrykket får vi en formel for å beregne den aktive motstanden til tilleggsmotstanden g til 6, nødvendig for å oppnå en gitt økt slip s ved en gitt (nominell) belastning:
r ext = r 2 (s/s nom - 1).
Det er to metoder for å beregne startreostater: grafisk og analytisk.
Grafisk metode mer nøyaktig, men krever konstruksjon av en naturlig mekanisk karakteristikk og et startdiagram av motoren, som er forbundet med en stor mengde grafisk arbeid.
Analytisk metode beregning av startreostater er enklere, men mindre nøyaktig. Dette skyldes det faktum at metoden er basert på antakelsen om at arbeidsdelen av den naturlige mekaniske egenskapen til en induksjonsmotor er rett. Men når glidningen er nær kritisk, forårsaker denne forutsetningen en merkbar feil, som er jo mer signifikant jo nærmere startmomentet starter. M 1 til maksimalt dreiemoment M m ah. Derfor er den analytiske beregningsmetoden kun aktuelt for verdiene til det første startmomentet M 1 < 0,7 M m ah .
Motstanden til motstandene i stadiene av startreostaten:
tredje r ext3 = r 2 (Am-1);
sekund r ext2 = r legg til3 λ m;
først r ext1 = r legg til 2 λ m,
Hvor r 2 - aktiv motstand av faseviklingen til rotoren til induksjonsmotoren,
Hvor E 2 og Jeg 2nom - katalogdata for valgt motorstørrelse.
Motstanden til startreostaten på trinnene:
første R PR1 = r ext1 + r ext2 + r ext3 ;
andre R PR2 = r ext2 + r ext3
tredje R PR2 = r ext3.
For å begrense startstrømmen til asynkronmotorer med ekorn-burrotor bruk spesielle kretser for deres inkludering med elementer som begrenser startstrømmen. Alle disse metodene er basert på å redusere spenningen som påføres statorviklingen. De mest brukte kretsene med inkludering av motstander eller choker i de lineære ledningene til statoren (se fig. 3.14, b).Beregningen av den nødvendige motstanden til disse elementene for en gitt reduksjon i startstrømmen a, i forhold til dens naturlige verdi, utføres i henhold til formlene:
for motstander med aktiv motstand
R n = 
for choker
X L= 
Motorimpedans i kortslutningsmodus Z k, ohm,
Z k =U 1 /Jeg P
Her X til og r k - induktive og aktive komponenter av denne motstanden
R k = Z k cosφ k ; x k =
Reduksjon av kunstig startmoment når den er slått på R eller L vil være
α m = α 2 Jeg
Tabell 3.1
Således, hvis verdien α m er satt, som bestemmer verdien av det kunstige startmomentet M "n, så for å beregne de tilsvarende verdiene R eller x L du kan bruke formlene ovenfor, og erstatte i dem i stedet for α 2 Jeg, verdien av α m.
Elektrisk motstand motorviklinger gitt i katalogene tilsvarer vanligvis en temperatur på +20 °C. Men når man beregner egenskapene og parameterne til motorer, må motstanden til viklingene deres bringes til driftstemperaturen. I henhold til gjeldende standard tas driftstemperaturen avhengig av varmemotstandsklassen elektrisk isolasjon brukt i motoren: med varmebestandighetsklasse B er driftstemperaturen 75 ° C, og med varmebestandighetsklassene F og H - 115 ° C. Omberegning av viklingsmotstandene til driftstemperaturen utføres ved å multiplisere viklingsmotstanden ved en temperatur på 20 ° C, med oppvarmingskoeffisienten k t:
r= r 20k t .
Verdiene til denne koeffisienten tas avhengig av formålet med motorene og deres dimensjoner (høyden på rotasjonsaksen) (tabell 3.1).
SYNKRONØSE MASKINER
ENKLE KONSEPTER
Et karakteristisk trekk ved synkronmaskiner er en stiv forbindelse mellom rotorhastigheten n 1 og AC-frekvens i statorviklingen f 1:
n 1 = f 1 60/ R.
Med andre ord roterer det roterende magnetfeltet til statoren og rotoren til synkronmaskinen synkront, dvs. med samme frekvens.
I henhold til deres design er synkrone maskiner delt inn i fremtredende pol og ikke-fremspringende pol. I synkrone maskiner med fremtredende pol har rotoren uttalte poler som feltviklingsspolene er plassert på, matet likestrøm. Et karakteristisk trekk ved slike maskiner er forskjellen i magnetisk motstand langs den langsgående aksen (langs aksen til polene) og langs den tverrgående aksen (langs aksen som passerer i det interpolare rommet). Magnetisk motstand mot statorstrøm langs lengdeaksen dd mye mindre magnetisk motstand mot statorstrømning tverrgående akse qq. I synkrone maskiner med ikke-fremspringende pol er de magnetiske motstandene langs langsgående og tverrgående akser de samme, siden luftgapet for disse maskinene langs statoromkretsen er det samme.
Utformingen av statoren til en synkron maskin skiller seg i prinsippet ikke fra statoren asynkron maskin. I statorviklingen, under drift av maskinen, induseres EMF og strømmer flyter som skaper en magnetomotorisk kraft (MFF), hvis maksimale verdi er
F 1 =0,45m 1 Jeg 1 w 1 k rev1 / R
Denne MDS skaper et roterende magnetfelt, og i luftgapet δ maskinen lager en magnetisk induksjon, hvis distribusjonsplan innenfor hver poldeling t avhenger av utformingen av rotoren (fig. 4.1).
For en synkronmaskin med fremtredende pol er spenningsligningen gyldig:
Ú 1 =Ė 0 + Ė 1d+ Ė 1q+ Ė σ1 – İ 1 r 1
Hvor Ė 0 - hoved-EMF til synkronmaskinen, proporsjonal med hovedmagnetisk fluks til synkronmaskinen F 0 ; Ė 1 d - EMF for ankerreaksjonen til den synkrone maskinen langs lengdeaksen, proporsjonal med MMF for ankerreaksjonen langs lengdeaksen F 1d; Ė σ1 - ankerreaksjon EMF langs den tverrgående aksen, proporsjonal med ankerreaksjonen MMF langs den tverrgående aksen F 1q; Ė σ1 - EMF av lekkasje på grunn av tilstedeværelsen av en magnetisk fluks av lekkasje F 0, er verdien av denne EMF proporsjonal med den induktive motstanden til lekkasjen til statorviklingen X 1
Ė σ1 = jİ 1r
İ 1 r 1 - aktivt spenningsfall i statorfaseviklingen, vanligvis blir denne verdien neglisjert når du løser problemer på grunn av dens lille verdi.
Ris. 4.1. Grafer over fordelingen av magnetisk induksjon langs den tverrgående aksen
implisitt pol ( EN) og eksplisitt pol ( b)synkrone maskiner:
1 - MDS tidsplan; 2 - magnetisk induksjonsgraf
For en ikke-fremspringende pol synkronmaskin har spenningsligningen formen
Ú 1 =Ė 0 + Ė c- İ 1 r 1
Her
Ė c= Ė 1 + Ė σ1
Hvor Ė 1 - Armaturreaksjon emk fra en implisitt-pol synkron maskin. De betraktede spenningsligningene tilsvarer vektorspenningsdiagrammer. Disse diagrammene må bygges for å bestemme enten maskinens hovedemf E 0, eller statorviklingsspenning U 1. Det bør huskes at spenningsligningene og de tilsvarende vektordiagrammene ikke tar hensyn til den magnetiske metningen av magnetkretsen til en synkronmaskin, som, som du vet, påvirker verdien av induktive motstander, noe som får dem til å avta. Å gjøre rede for denne metningen er en vanskelig oppgave, derfor bruker de vanligvis ved beregning av EMF og spenninger til synkrone maskiner. praktisk diagram EMF, som tar hensyn til metningstilstanden til det magnetiske systemet, forårsaket av virkningen av ankerreaksjonen når synkronmaskinen er lastet. Når du konstruerer et praktisk EMF-diagram, blir magnetiseringskraften til ankerreaksjonen ikke dekomponert i langsgående og tverrgående komponenter, derfor kan dette diagrammet brukes både i beregningene av fremtredende pol og implisitt-polmaskiner.
Når de løser problemer knyttet til enten synkrongeneratorer koblet parallelt med nettverket, eller med synkronmotorer, bruker de vinkelegenskaper synkrone maskiner, som representerer avhengigheten av det elektromagnetiske dreiemomentet M fra belastningsvinkelen θ. I dette tilfellet bør det huskes at i synkrone maskiner med fremtredende pol er det to punkter: det viktigste M hoved og reaktiv M p, og i ikke-fremspringende polmaskiner - bare hovedpoenget:
![]()
Lastvinkel θ nom tilsvarer nominelt dreiemoment M ingen m. Det maksimale dreiemomentet til synkronmaskinen bestemmer overbelastningskapasiteten til synkronmaskinen, noe som er viktig for både synkrone generatorer opererer parallelt med nettverket, og for synkronmotorer. I ikke-fremspringende pol synkronmaskiner maksimalt øyeblikk tilsvarer belastningsvinkelen θ = 90°, i fremspringende polmaskiner θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного elektromagnetiske øyeblikk denne maskinen.
For å beregne den kritiske lastvinkelen, som bestemmer overbelastningskapasiteten til synkrone maskiner med fremtredende pol, kan du bruke uttrykket.





