โมเมนต์แม่เหล็กไฟฟ้า a มอเตอร์ซิงโครนัสเกิดขึ้นจากปฏิกิริยาของกระแสในขดลวดโรเตอร์ที่มีสนามแม่เหล็กหมุน
โมเมนต์แม่เหล็กไฟฟ้า เอ็มสัดส่วนกับกำลังแม่เหล็กไฟฟ้า:
 (3.40)
(3.40)
ความเร็วในการหมุนซิงโครนัสเชิงมุม
แทนที่ใน (3.39) ค่าของกำลังแม่เหล็กไฟฟ้า (3.33) เราได้รับ:
 , (3.41)
, (3.41)
กล่าวคือ โมเมนต์แม่เหล็กไฟฟ้าของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังของการสูญเสียไฟฟ้าในขดลวดของโรเตอร์
หากค่าของกระแสโรเตอร์ตามนิพจน์ (3.28) ถูกแทนที่ด้วย (3.41) เราจะได้สูตร โมเมนต์แม่เหล็กไฟฟ้าเครื่องอะซิงโครนัส (Nm):
 (3.42)
(3.42)
พารามิเตอร์ของวงจรสมมูลของเครื่องอะซิงโครนัส r 1 , r¢ 2 , x 1และ x¢ 2รวมอยู่ในนิพจน์ (3.42) เป็นค่าคงที่เนื่องจากค่าของพวกเขายังคงไม่เปลี่ยนแปลงในทางปฏิบัติเมื่อมีการเปลี่ยนแปลงโหลดของเครื่อง แรงดันไฟฟ้าที่ขดลวดสเตเตอร์สามารถถือได้ว่าเป็นค่าคงที่ U 1และความถี่ f1. ในแง่ของช่วงเวลา เอ็มตัวแปรเดียวคือสลิป สซึ่งสำหรับโหมดการทำงานที่แตกต่างกันของเครื่องอะซิงโครนัสสามารถรับค่าต่างๆ ในช่วงตั้งแต่ + ¥ ถึง -¥ (ดูรูปที่ 3.5)
พิจารณาการพึ่งพาแรงบิดในการลื่น M = ฉที่ U 1= คอนสตรัค, f1= const และค่าคงที่ของวงจรสมมูล การพึ่งพานี้เรียกว่า ลักษณะทางกลเครื่องอะซิงโครนัส การวิเคราะห์นิพจน์ (3.42) ซึ่งเป็นนิพจน์เชิงวิเคราะห์ของคุณลักษณะทางกล M = ฉแสดงว่าสำหรับค่าสลิป ส= 0 และ ส= ¥ โมเมนต์แม่เหล็กไฟฟ้า เอ็ม= 0 จากนี้ไปจะมีลักษณะทางกล M = ฉมีค่าสูงสุด
เพื่อกำหนดสลิปวิกฤต s crจำเป็นต้องหาอนุพันธ์อันดับ 1 ของ (3.42) ให้เท่ากับโมเมนต์สูงสุดและเท่ากับศูนย์: ผลที่ตามมา
 (3.43)
(3.43)
แทนที่ค่าของสลิปวิกฤต (ตาม 3.43) ลงในนิพจน์สำหรับโมเมนต์แม่เหล็กไฟฟ้า (3.42) หลังจากการแปลงเป็นชุด เราจะได้นิพจน์สำหรับโมเมนต์สูงสุด (N·m):
 (3.44)
(3.44)
ใน (3.43) และ (3.44) เครื่องหมายบวกสอดคล้องกับโหมดมอเตอร์ และเครื่องหมายลบไปยังโหมดเครื่องกำเนิดไฟฟ้าของการทำงานของเครื่องอะซิงโครนัส
สำหรับเครื่องอะซิงโครนัส วัตถุประสงค์ทั่วไปความต้านทานที่ใช้งานของขดลวดสเตเตอร์ r1น้อยกว่าผลรวมของปฏิกิริยารีแอกทีฟ: r1< < (x 1 + x¢ 2). จึงละเลยคุณค่า r1เราได้รับนิพจน์ที่ง่ายขึ้นสำหรับสลิปวิกฤต
 , (3.45)
, (3.45)
และแรงบิดสูงสุด (N·m)
 (3.46)
(3.46)
ข้าว. 3.10. การพึ่งพาโหมดการทำงานของเครื่องอะซิงโครนัสบนสลิป
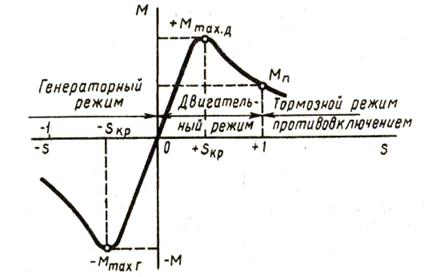
การวิเคราะห์นิพจน์ (3.44) แสดงว่า ช่วงเวลาสูงสุดมีเครื่องอะซิงโครนัสในโหมดเครื่องกำเนิดไฟฟ้ามากกว่าในโหมดมอเตอร์ ( M max Г > М maxD). ในรูป 3.4 แสดงลักษณะทางกลของเครื่องอะซิงโครนัส M = ฉที่ U 1= คอนสตรัค ลักษณะนี้ระบุโซนที่สอดคล้องกับโหมดการทำงานต่างๆ: โหมดมอเตอร์ (0< ส < 1), когда электромагнитный момент เอ็มกำลังหมุน โหมดเครื่องกำเนิดไฟฟ้า ( - ¥ < s < 0) и тормозной режим противовключением (1 < ส < + ¥), когда электромагнитный момент เอ็มเป็นการยับยั้ง
จาก (3.42) ตามมาว่าแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังสองของแรงดันไฟหลัก: เอ็ม ≡ ยู 1 2. สิ่งนี้ส่งผลกระทบอย่างมากต่อประสิทธิภาพของมอเตอร์: แม้แต่แรงดันไฟหลักที่ลดลงเล็กน้อยก็ทำให้แรงบิดของมอเตอร์แบบอะซิงโครนัสลดลงอย่างเห็นได้ชัด ตัวอย่างเช่น เมื่อแรงดันไฟหลักลดลง 10% เมื่อเทียบกับค่าเล็กน้อย ( U 1 = 0.9คุณหนู) แรงบิดแม่เหล็กไฟฟ้าของมอเตอร์ลดลง 19%: М¢ = 0.9 2 เอ็ม = 0.81เอ็ม, ที่ไหน เอ็ม— โมเมนต์ที่แรงดันไฟฟ้าของเครือข่ายและ เอ็ม¢ - แรงบิดที่แรงดันไฟฟ้าลดลง
ในการวิเคราะห์การทำงานของมอเตอร์แบบอะซิงโครนัส จะสะดวกกว่าในการใช้ลักษณะทางกล M = f(s),แสดงในรูป 3.5.
 |
ข้าว. 3.11. การพึ่งพาแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์เหนี่ยวนำบนสลิป
เมื่อมอเตอร์เชื่อมต่อกับเครือข่ายสนามแม่เหล็กสเตเตอร์โดยไม่มีแรงเฉื่อยจะเริ่มหมุนด้วยความถี่ซิงโครนัสทันที น 1ในเวลาเดียวกันโรเตอร์ของมอเตอร์ภายใต้อิทธิพลของแรงเฉื่อยในช่วงเวลาเริ่มต้นของการเริ่มต้นยังคงนิ่ง ( น 2= 0) และเลื่อน ส = 1.
แทนค่า (3.42) สลิป ส= 1 เราได้นิพจน์สำหรับแรงบิดเริ่มต้นของมอเตอร์แบบอะซิงโครนัส (N·m):
 (3.47)
(3.47)
ภายใต้การกระทำของช่วงเวลานี้ การหมุนของโรเตอร์ของมอเตอร์จะเริ่มขึ้น ในขณะที่สลิปลดลง และแรงบิดจะเพิ่มขึ้นตามลักษณะ M = ฉ. ที่สลิปวิกฤต s crช่วงเวลาถึงค่าสูงสุด M ma x.
ด้วยความเร็วในการหมุนที่เพิ่มขึ้นอีก (ลดการลื่น) ช่วงเวลา เอ็มเริ่มลดลงจนกระทั่งถึงค่าคงที่เท่ากับผลรวมของโมเมนต์ตอบโต้ที่ใช้กับโรเตอร์ของมอเตอร์: โมเมนต์ XX M0และแรงบิดโหลดที่มีประโยชน์ (แรงบิดบนเพลามอเตอร์) M 2, นั่นคือ
M \u003d M 0 + M 2 \u003d M st. (3.48)
ควรระลึกไว้เสมอว่าเมื่อสลิปใกล้เคียงกับความสามัคคี (โหมดเริ่มต้นของมอเตอร์) พารามิเตอร์ของวงจรสมมูลของมอเตอร์แบบอะซิงโครนัสจะเปลี่ยนค่าอย่างเห็นได้ชัด สาเหตุหลักมาจากสองปัจจัย: ความอิ่มตัวของแม่เหล็กที่เพิ่มขึ้นของชั้นฟันของสเตเตอร์และโรเตอร์ ซึ่งทำให้ความต้านทานการรั่วไหลของอุปนัยลดลง x 1และ x2และผลกระทบของการกระจัดของกระแสในแถบโรเตอร์ซึ่งนำไปสู่การเพิ่มขึ้นของความต้านทานเชิงรุกของขดลวดโรเตอร์ ร 2 ¢. ดังนั้นพารามิเตอร์ของวงจรสมมูลของมอเตอร์แบบอะซิงโครนัสที่ใช้ในการคำนวณแรงบิดแม่เหล็กไฟฟ้าตาม (3.42), (3.44) และ (3.46) จึงไม่สามารถนำมาใช้ในการคำนวณแรงบิดเริ่มต้นตาม (3.47)
ช่วงเวลาคงที่ M stเท่ากับผลรวมของโมเมนต์ตอบโต้กับการหมุนที่สม่ำเสมอของโรเตอร์ ( น 2= คอนสตรัท) สมมุติว่าโมเมนต์ตอบโต้บนเพลามอเตอร์ M 2สอดคล้องกับโหลดพิกัดของมอเตอร์ ในกรณีนี้ สภาวะคงตัวของการทำงานของเครื่องยนต์จะถูกกำหนดโดยจุดบนลักษณะทางกลที่มีพิกัด M = M ชื่อและ s = s นอม,ที่ไหน ม นอมและ นอม— ค่าเล็กน้อยของแรงบิดแม่เหล็กไฟฟ้าและสลิป
จากการวิเคราะห์ลักษณะทางกลก็มีดังนี้ การทำงานที่เสถียรของมอเตอร์เหนี่ยวนำเป็นไปได้โดยมีการลื่นน้อยกว่าวิกฤต (ส< s кр ) เช่น ในส่วน OA ของคุณสมบัติทางกล ความจริงก็คือมันอยู่ในพื้นที่นี้ที่การเปลี่ยนแปลงของภาระบนเพลามอเตอร์จะมาพร้อมกับการเปลี่ยนแปลงที่สอดคล้องกันในแรงบิดแม่เหล็กไฟฟ้า
ดังนั้นหากเครื่องยนต์ทำงานในโหมดปกติ ( ชื่อม; นอม) จากนั้นช่วงเวลาจะเท่ากัน: M ชื่อ \u003d M 0 + M 2. หากมีแรงบิดโหลดเพิ่มขึ้น M 2จนถึงค่า M¢2จากนั้นความเท่าเทียมกันของช่วงเวลาจะถูกละเมิดเช่น ม นอม< М 0 + М 2 และความเร็วของโรเตอร์จะเริ่มลดลง (สลิปจะเพิ่มขึ้น) สิ่งนี้จะนำไปสู่การเพิ่มขึ้นของแรงบิดแม่เหล็กไฟฟ้าเป็นค่า M¢ \u003d M 0 + M¢ 2, (จุด B) หลังจากนั้นโหมดการทำงานของเครื่องยนต์จะนิ่งอีกครั้ง
หากในระหว่างการทำงานของเครื่องยนต์ในโหมดปกติแรงบิดของโหลดลดลงเป็นค่า М¢¢ 2จากนั้นความเท่าเทียมกันของช่วงเวลาจะถูกละเมิดอีกครั้ง แต่ตอนนี้แรงบิดจะมากกว่าผลรวมของฝ่ายตรงข้าม: M ชื่อ > M 0 + M¢¢ 2. ความเร็วของโรเตอร์จะเริ่มเพิ่มขึ้น (สลิปจะลดลง) และจะทำให้แรงบิดแม่เหล็กไฟฟ้าลดลง เอ็มจนถึงค่า M¢¢ \u003d M 0 + M¢¢ 2(จุด C); โหมดการทำงานที่เสถียรจะถูกกู้คืนอีกครั้ง แต่ที่ค่าอื่น เอ็มและ ส.
การทำงานของมอเตอร์เหนี่ยวนำจะไม่เสถียรในระหว่างการลื่น s³s cr. ดังนั้นหากแรงบิดแม่เหล็กไฟฟ้าของเครื่องยนต์ M = M สูงสุดและลื่น s = s crจากนั้นโมเมนต์โหลดก็เพิ่มขึ้นเล็กน้อย M 2ทำให้เกิดสลิปเพิ่มขึ้น สจะทำให้แรงบิดแม่เหล็กไฟฟ้าลดลง เอ็ม. ตามมาด้วยสลิปที่เพิ่มขึ้นเรื่อยๆ ไปเรื่อยๆ จนกว่าสลิปจะถึงค่า ส= 1 นั่นคือ จนกว่าโรเตอร์ของมอเตอร์จะหยุด
ดังนั้น เมื่อแรงบิดแม่เหล็กไฟฟ้าถึงค่าสูงสุด ขีดจำกัดของการทำงานที่มั่นคงของมอเตอร์เหนี่ยวนำจะเข้ามา ดังนั้น เพื่อการทำงานที่เสถียรของเครื่องยนต์ จำเป็นต้องให้ผลรวมของโมเมนต์โหลดที่กระทำกับโรเตอร์น้อยกว่าแรงบิดสูงสุด: M st \u003d (M 0 + M 2)< М тах . แต่เพื่อให้การทำงานของมอเตอร์เหนี่ยวนำมีความน่าเชื่อถือและเพื่อให้การโอเวอร์โหลดแบบสุ่มในระยะสั้นไม่ทำให้มอเตอร์หยุดทำงาน จึงจำเป็นต้องมี ความจุเกิน.
ความจุเกินของมอเตอร์ λ ถูกกำหนดโดยอัตราส่วนของโมเมนต์สูงสุด M maxถึงชื่อ ม นอม. สำหรับ มอเตอร์เหนี่ยวนำความจุเกินวัตถุประสงค์ทั่วไปคือ = 1.7 ÷ 2.5
คุณควรใส่ใจกับความจริงที่ว่าการทำงานของเครื่องยนต์เมื่อเลื่อนขึ้น ส< s кр นั่นคือในส่วนการทำงานของคุณสมบัติทางกลนั้นประหยัดที่สุดเนื่องจากสอดคล้องกับค่าสลิปเล็กน้อยและด้วยเหตุนี้ค่าการสูญเสียทางไฟฟ้าในขดลวดของโรเตอร์จึงลดลง P e2 \u003d sP em.
การใช้สูตร (3.35) ในการคำนวณลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสนั้นไม่สามารถทำได้เสมอไป เนื่องจากพารามิเตอร์ของวงจรสมมูลของมอเตอร์มักจะไม่มีให้ในแคตตาล็อกและหนังสืออ้างอิง ดังนั้น สำหรับการคำนวณเชิงปฏิบัติ สูตรแรงบิดแบบง่ายจึงมักจะ ใช้แล้ว. สูตรนี้ตั้งอยู่บนสมมติฐานที่ว่าความต้านทานเชิงแอคทีฟของขดลวดสเตเตอร์ของมอเตอร์เหนี่ยวนำ r1= 0 ในขณะที่:
 (3.49)
(3.49)
สลิปวิกฤตถูกกำหนดโดยสูตร:
![]() . (3.50)
. (3.50)
การคำนวณคุณสมบัติทางกลจะง่ายกว่ามากหากดำเนินการในหน่วยสัมพัทธ์  . ในกรณีนี้ สมการคุณลักษณะทางกลมีรูปแบบดังนี้
. ในกรณีนี้ สมการคุณลักษณะทางกลมีรูปแบบดังนี้
 . (3.51)
. (3.51)
การใช้สูตรอย่างง่าย (3.51) เหมาะสมที่สุดเมื่อคำนวณส่วนการทำงานของคุณสมบัติทางกลระหว่างการเลื่อน ส< s кр เนื่องจากในกรณีนี้ข้อผิดพลาดไม่เกินค่าที่อนุญาตสำหรับการคำนวณทางเทคนิค เมื่อเลื่อน s > s crข้อผิดพลาดสามารถเข้าถึง 15-17%
ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสที่มีการเปลี่ยนแปลงของแรงดันไฟหลักและความต้านทานเชิงแอคทีฟของขดลวดโรเตอร์
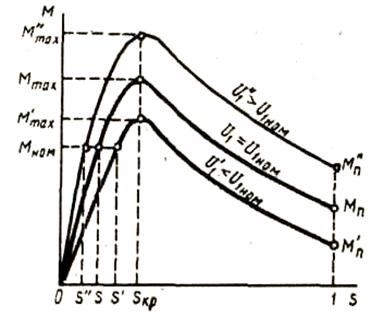
จาก (3.42), (3.44) และ (3.47) จะเห็นได้ว่าแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์เหนี่ยวนำตลอดจนค่าสูงสุดและเริ่มต้นนั้นเป็นสัดส่วนกับกำลังสองของแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์: เอ็ม ≡ ยู 1 2 .ในขณะเดียวกัน การวิเคราะห์นิพจน์ (3.43) แสดงว่าค่าของสลิปวิกฤตไม่ได้ขึ้นอยู่กับแรงดันไฟฟ้า ยู 1 .สิ่งนี้ทำให้เรามีโอกาสที่จะพล็อตลักษณะทางกล เอ็ม = ฉสำหรับ ค่านิยมที่แตกต่างกันแรงดันไฟฟ้า U 1(รูปที่ 3.12) ซึ่งตามมาด้วยความผันผวนของแรงดันไฟหลัก U 1เกี่ยวกับเขา ค่าเล็กน้อย U 1นอมไม่เพียงแต่จะมาพร้อมกับการเปลี่ยนแปลงในแรงบิดสูงสุดและแรงบิดเริ่มต้นเท่านั้น แต่ยังรวมถึงการเปลี่ยนแปลงความเร็วของโรเตอร์ด้วย
 |
ข้าว. 3.12. อิทธิพลของแรงดันไฟฟ้าต่อชนิดของลักษณะทางกลของมอเตอร์เหนี่ยวนำ
เมื่อแรงดันไฟหลักลดลง ความเร็วของโรเตอร์จะลดลง (สลิปเพิ่มขึ้น) แรงดันไฟฟ้า U 1มีอิทธิพลต่อการกำหนดช่วงเวลาสูงสุด ม.เช่นเดียวกับความจุเกินของเครื่องยนต์ ดังนั้นหากแรงดันไฟฟ้า U 1ลดลง 30% กล่าวคือ คุณ 1 \u003d 0.7U ชื่อจากนั้นแรงบิดสูงสุดของมอเตอร์เหนี่ยวนำจะลดลงครึ่งหนึ่ง:
M¢ สูงสุด = 0.7 2 M สูงสุด = 0.49M max.
โดยความจุโอเวอร์โหลดของมอเตอร์จะลดลงเท่าใด ตัวอย่างเช่น ที่แรงดันไฟฟ้าที่กำหนดของเครือข่าย ความจุโอเวอร์โหลด  จากนั้นเมื่อแรงดันไฟฟ้าลดลง 30% ความจุเกินของมอเตอร์
จากนั้นเมื่อแรงดันไฟฟ้าลดลง 30% ความจุเกินของมอเตอร์  , เช่น | เครื่องยนต์ไม่สามารถรับน้ำหนักได้
, เช่น | เครื่องยนต์ไม่สามารถรับน้ำหนักได้
จาก (3.44) ค่าของแรงบิดสูงสุดของมอเตอร์ไม่ได้ขึ้นอยู่กับความต้านทานของโรเตอร์ ร 2 .ส่วนสลิปวิกฤติ s cr,ดังจะเห็นได้จาก (3.43) เป็นสัดส่วนกับแนวต้าน ร 2 .ดังนั้นหากในมอเตอร์แบบอะซิงโครนัสความต้านทานเชิงแอคทีฟของวงจรโรเตอร์จะเพิ่มขึ้นเรื่อย ๆ ค่าของแรงบิดสูงสุดจะยังคงไม่เปลี่ยนแปลงและสลิปวิกฤตจะเพิ่มขึ้น (รูปที่ 3.13) ในกรณีนี้แรงบิดเริ่มต้นของเครื่องยนต์ เอ็ม พีเพิ่มขึ้นตามความต้านทานที่เพิ่มขึ้น ร¢ 2ถึงค่าบางอย่าง ในรูปจะตรงกับแนวต้าน ร¢ 2 IIIซึ่งแรงบิดเริ่มต้นมีค่าเท่ากับสูงสุด ด้วยความต้านทานที่เพิ่มขึ้นอีก ร¢ 2แรงบิดเริ่มต้นจะลดลง
 |
ข้าว. 3.13. อิทธิพลของความต้านทานเชิงแอคทีฟของขดลวดโรเตอร์ที่มีต่อลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
การวิเคราะห์กราฟ เอ็ม = ฉแสดงในรูป 3.13 ยังแสดงให้เห็นว่าการเปลี่ยนแปลงความต้านทานของโรเตอร์ ร¢ 2พร้อมกับการเปลี่ยนแปลงความเร็วในการหมุน: ด้วยการเพิ่มขึ้น ร¢ 2ด้วยโมเมนต์โหลดคงที่ M stสลิปเพิ่มขึ้นเช่น ความเร็วลดลง (คะแนน 1, 2, 3 และ 4).
อิทธิพลของความต้านทานเชิงแอคทีฟของขดลวดโรเตอร์ที่มีต่อรูปร่างของลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสถูกนำมาใช้ในการออกแบบมอเตอร์ ตัวอย่างเช่น มอเตอร์แบบอะซิงโครนัสสำหรับวัตถุประสงค์ทั่วไปต้องมีคุณลักษณะความเร็ว "แข็ง" (ดูรูปที่ 3.11) กล่าวคือ ทำงานโดยมีสลิปเล็กน้อย ทำได้โดยใช้ขดลวดโรเตอร์ที่มีความต้านทานแอกทีฟต่ำในมอเตอร์ รข 2.ในกรณีนี้ มอเตอร์จะมีประสิทธิภาพสูงขึ้นเนื่องจากการลดการสูญเสียทางไฟฟ้าในขดลวดของโรเตอร์ ( R e2 \u003d ม. 1 I¢ 2 2 r¢ 2). ค่าที่เลือก ร¢ 2ต้องให้มอเตอร์มีแรงบิดเริ่มต้นที่จำเป็น
หากจำเป็นต้องได้มอเตอร์ที่มีค่าแรงบิดเริ่มต้นเพิ่มขึ้น ความต้านทานเชิงแอคทีฟของขดลวดโรเตอร์จะเพิ่มขึ้น แต่ในขณะเดียวกันก็ได้รับเครื่องยนต์ที่มีค่าสลิปน้อยและด้วยประสิทธิภาพที่ต่ำกว่า
ถือว่าเป็นการพึ่งพา M \u003d f (U 1)และ M = ฉ(r 2 ")ยังมีความสำคัญในทางปฏิบัติอย่างมากเมื่อพิจารณาถึงประเด็นในการสตาร์ทและควบคุมความเร็วของการหมุนของมอเตอร์แบบอะซิงโครนัส
ลักษณะการทำงานของมอเตอร์แบบอะซิงโครนัส
ลักษณะสมรรถนะของมอเตอร์เหนี่ยวนำ (รูปที่ 3.14) แสดงการพึ่งพาความเร็วในการหมุนแบบกราฟิก น 2, ประสิทธิภาพ ชม., โมเมนต์ที่มีประโยชน์ (แรงบิดบนเพลา) M 2, ตัวประกอบกำลัง cosφ 1และกระแสสเตเตอร์ ฉัน 1, จากพลังที่มีประโยชน์ R 2ที่ U 1= const และ f1= คอนสตรัค

ข้าว. 3.14. ลักษณะการทำงานของมอเตอร์แบบอะซิงโครนัส
ลักษณะความเร็วn 2 \u003d f (P 2).
ความเร็วโรเตอร์ของมอเตอร์เหนี่ยวนำ
n 2 \u003d n 1 (1-s)
เลื่อนบน (3.33)
กล่าวคือ การลื่นของมอเตอร์และด้วยเหตุนี้ความเร็วจึงถูกกำหนดโดยอัตราส่วนของการสูญเสียไฟฟ้าในโรเตอร์ต่อกำลังแม่เหล็กไฟฟ้า อาร์เอ็ม.
ละเลยการสูญเสียทางไฟฟ้าในโรเตอร์ในโหมดว่างเราสามารถรับ R e2= 0 ดังนั้น s0 ≈ 0 และ น 20 ≈ น 1,. เมื่อโหลดบนเพลามอเตอร์เพิ่มขึ้นอัตราส่วน (8.1) จะเพิ่มขึ้นถึงค่า 0.01 ÷ 0.08 ที่พิกัดโหลด ตามการพึ่งพานี้ n 2 = ฉ (P 2)เป็นเส้นโค้งที่เอียงเล็กน้อยไปยังแกน x
อย่างไรก็ตามด้วยความต้านทานที่เพิ่มขึ้นของโรเตอร์ ร¢ 2ความชันของเส้นโค้งนี้จะเพิ่มขึ้น ในกรณีนี้ การเปลี่ยนแปลงความเร็วรอบ หน้า 2ระหว่างโหลดผันผวน R 2เพิ่ม. สิ่งนี้อธิบายได้ด้วยความจริงที่ว่าเมื่อเพิ่มขึ้น ร¢ 2การสูญเสียไฟฟ้าในโรเตอร์เพิ่มขึ้น [ดู (3.31)].
ประสิทธิภาพทางกล M 2 = f(P 2)
การพึ่งพาช่วงเวลาที่มีประโยชน์บนเพลามอเตอร์ M 2จากพลังสุทธิ R 2ถูกกำหนดโดยนิพจน์
 (3.53)
(3.53)
ที่ไหน R 2— พลังที่มีประโยชน์ W;
คือ ความถี่เชิงมุมของการหมุนของโรเตอร์
จากนิพจน์นี้ว่า if น 2= const แล้วกราฟ M 2 \u003d ฉ (P 2)เป็นเส้นตรง แต่ในมอเตอร์แบบอะซิงโครนัสที่มีโหลดเพิ่มขึ้น R 2ความเร็วของโรเตอร์ลดลง ดังนั้นช่วงเวลาที่มีประโยชน์บนเพลา M 2เมื่อโหลดเพิ่มขึ้น จะเพิ่มเร็วกว่าโหลดเล็กน้อย ดังนั้น กราฟ M 2 = ฉ(P2)มีลักษณะโค้งมน
การพึ่งพา cosφ 1 = f(P 2)
เนื่องจากกระแสสเตเตอร์ ฉัน 1มีส่วนประกอบที่เป็นปฏิกิริยา (อุปนัย) ที่จำเป็นในการสร้างสนามแม่เหล็กในสเตเตอร์ ตัวประกอบกำลังของมอเตอร์แบบอะซิงโครนัสมีค่าน้อยกว่าหนึ่ง
ค่าต่ำสุดของตัวประกอบกำลังไฟฟ้าสอดคล้องกับโหมด XX นี่คือคำอธิบายโดยข้อเท็จจริงที่ว่า XX . ปัจจุบัน ฉัน 0ภายใต้ภาระใด ๆ ยังคงไม่เปลี่ยนแปลงอย่างแท้จริง ดังนั้น ที่โหลดมอเตอร์ต่ำ กระแสสเตเตอร์จะมีขนาดเล็กและเป็นปฏิกิริยาส่วนใหญ่ ( ฉัน 1 ≈ ฉัน 0). เป็นผลให้การเปลี่ยนเฟสของกระแสสเตเตอร์ที่สัมพันธ์กับแรงดันไฟฟ้ามีความสำคัญ ( φ ≈ φ 0 ) น้อยกว่า 90° เพียงเล็กน้อยเท่านั้น (รูปที่ 3.15)
ตัวประกอบกำลังของมอเตอร์แบบอะซิงโครนัสในโหมด XX มักจะไม่เกิน 0.2 ด้วยการเพิ่มภาระบนเพลามอเตอร์ส่วนประกอบที่ใช้งานของกระแสจะเพิ่มขึ้น ฉัน 1และตัวประกอบกำลังเพิ่มขึ้นถึงค่าสูงสุด (0.80 ÷ 0.90) ที่โหลดใกล้กับค่าเล็กน้อย
 |
รูปที่ 3.15 แผนภาพเวกเตอร์ของมอเตอร์เหนี่ยวนำภายใต้ภาระเบา
ภาระที่เพิ่มขึ้นอีกมาพร้อมกับการลดลง cosφ 1ซึ่งอธิบายได้จากการเพิ่มขึ้นของความต้านทานอุปนัยของโรเตอร์ ( x 2s) โดยการเพิ่มสลิปและด้วยเหตุนี้ความถี่ของกระแสในโรเตอร์ เพื่อปรับปรุงตัวประกอบกำลังของมอเตอร์แบบอะซิงโครนัส เป็นสิ่งสำคัญอย่างยิ่งที่มอเตอร์จะทำงานเสมอ หรืออย่างน้อยก็เป็นส่วนสำคัญของเวลา โดยมีโหลดใกล้กับโหลดที่กำหนด
สิ่งนี้สามารถมั่นใจได้ก็ต่อเมื่อ ทางเลือกที่เหมาะสมกำลังเครื่องยนต์ หากเครื่องยนต์ทำงานน้อยเกินไปในช่วงเวลาที่สำคัญ ให้เพิ่มขึ้น cosφ 1แรงดันไฟฟ้าที่ใช้อย่างเหมาะสมกับมอเตอร์ U 1ลด.
ตัวอย่างเช่น ในมอเตอร์ที่ทำงานด้วยการเชื่อมต่อเดลต้าของขดลวดสเตเตอร์ สามารถทำได้โดยการเชื่อมต่อขดลวดสเตเตอร์ในดาวอีกครั้ง ซึ่งจะทำให้การลดลงใน แรงดันเฟสภายในเวลาที่กำหนด. ในกรณีนี้ ฟลักซ์แม่เหล็กของสเตเตอร์ และด้วยเหตุนี้ กระแสแม่เหล็กจึงลดลงประมาณหนึ่งปัจจัย นอกจากนี้ส่วนประกอบที่ใช้งานของกระแสสเตเตอร์เพิ่มขึ้นบ้าง ทั้งหมดนี้มีส่วนทำให้ตัวประกอบกำลังของเครื่องยนต์เพิ่มขึ้น
ในรูป 3.16 แสดงกราฟการพึ่งพา cosφ 1มอเตอร์แบบอะซิงโครนัสจากโหลดเมื่อเชื่อมต่อขดลวดสเตเตอร์กับดาว (เส้นโค้ง 1 ) และสามเหลี่ยม (curve 2).
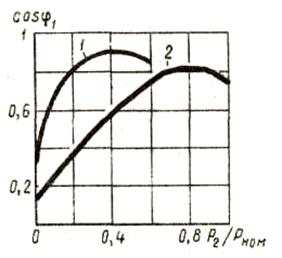
ข้าว. 3.16. ติดยาเสพติด cosφ 1จากโหลดเมื่อเชื่อมต่อสเตเตอร์ที่คดเคี้ยวกับดาว (1) และเดลต้า (2)
คำถามสำหรับการตรวจสอบตนเอง
1. อธิบายหลักการทำงานของเครื่องอะซิงโครนัส
2. อธิบายโหมดการทำงานของเครื่องอะซิงโครนัส
3. การเลื่อนของเครื่องอะซิงโครนัสเรียกว่าอะไร?
4. เขียนสมการแรงดันไฟฟ้าสำหรับมอเตอร์เหนี่ยวนำหรือไม่?
5. เขียนสมการ MMF และกระแสของมอเตอร์เหนี่ยวนำ
6. วาดวงจรสมมูลของมอเตอร์เหนี่ยวนำ
7. วาดไดอะแกรมเวกเตอร์ของมอเตอร์เหนี่ยวนำ
8. มีการสูญเสียอะไรบ้างในมอเตอร์แบบอะซิงโครนัส? วาดแผนภาพพลังงานสำหรับมอเตอร์เหนี่ยวนำ
9. เขียนสูตรสำหรับแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์เหนี่ยวนำ
10. วาดกราฟลักษณะทางกลของมอเตอร์เหนี่ยวนำ
11. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสเปลี่ยนแปลงอย่างไรขึ้นอยู่กับการเปลี่ยนแปลงของแรงดันไฟหลักและความต้านทานแอกทีฟของโรเตอร์?
12. วาดลักษณะการทำงานของมอเตอร์เหนี่ยวนำ
ลักษณะการทำงานของมอเตอร์แบบอะซิงโครนัส
ทำงานด้านวิศวกรรมไฟฟ้า
"ลักษณะการทำงานของมอเตอร์แบบอะซิงโครนัส"
บทนำ
เครื่องไฟฟ้าแบบอะซิงโครนัสเป็นเครื่องไฟฟ้ากระแสสลับซึ่งความเร็วของโรเตอร์ไม่เท่ากับความเร็วของสนามแม่เหล็กสเตเตอร์และขึ้นอยู่กับโหลด ส่วนใหญ่จะใช้เป็นเครื่องยนต์และเป็นเครื่องกำเนิดไฟฟ้า สเตเตอร์มีร่องซึ่งมีการพันขดลวดแบบเฟสเดียวหรือหลายเฟส ขดลวดนี้ออกแบบมาเพื่อสร้างสนามแม่เหล็กเคลื่อนที่ หมุนเป็นวงกลม - สำหรับเครื่องจักรสามเฟสและรูปวงรีที่เต้นเป็นจังหวะหรือหมุนเป็นวงรี - สำหรับเครื่องจักรแบบเฟสเดียว โรเตอร์เป็นส่วนหมุนของเครื่องจักรไฟฟ้า ซึ่งได้รับการออกแบบเพื่อสร้างสนามแม่เหล็กด้วย ซึ่งเมื่อทำปฏิกิริยากับสนามสเตเตอร์ จะนำไปสู่การสร้างแรงบิดแม่เหล็กไฟฟ้าที่กำหนดทิศทางของการแปลงพลังงาน สำหรับเครื่องปั่นไฟ ช่วงเวลานี้เป็นลักษณะการเบรก ซึ่งจะต่อต้านแรงบิดของตัวเสนอญัตติสำคัญ ซึ่งทำให้โรเตอร์เคลื่อนที่ ในทางกลับกัน สำหรับเครื่องยนต์ ช่วงเวลานี้กำลังขับเคลื่อน โดยเอาชนะแรงต้านของกลไกที่ขับเคลื่อนด้วยโรเตอร์
เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสเป็นเครื่องไฟฟ้าแบบอะซิงโครนัสที่ทำงานในโหมดเครื่องกำเนิดไฟฟ้า แหล่งเสริมของกระแสไฟฟ้าพลังงานต่ำและอุปกรณ์เบรก (ในไดรฟ์ไฟฟ้า)
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสเป็นเครื่องไฟฟ้าแบบอะซิงโครนัสที่ทำงานในโหมดมอเตอร์ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามเฟสที่พบมากที่สุด (คิดค้นในปี พ.ศ. 2432 โดย MO Dolivo-Dobrovolsky) มอเตอร์แบบอะซิงโครนัสค่อนข้างเรียบง่ายในการออกแบบและการทำงานที่เชื่อถือได้ แต่มีช่วงความเร็วที่จำกัดและตัวประกอบกำลังไฟฟ้าต่ำที่โหลดต่ำ กำลังจากเศษส่วนของ W ถึงหลายสิบ MW
1. มอเตอร์แบบอะซิงโครนัส
1.1 ความถี่การหมุนของสนามแม่เหล็กและโรเตอร์
อนุญาต n1คือ ความถี่การหมุนของสนามแม่เหล็ก ระบบกระแสสลับแบบหลายเฟสจะสร้างสนามแม่เหล็กหมุน ซึ่งความเร็วรอบต่อนาทีคือ n1=60f1/p โดยที่ f1 คือความถี่ของกระแส p คือจำนวนคู่ขั้วที่เกิดจากแต่ละเฟสของสเตเตอร์ คดเคี้ยว
n2- ความถี่ของการหมุนของโรเตอร์ หากโรเตอร์หมุนด้วยความถี่ไม่ เท่ากับความถี่การหมุนของสนามแม่เหล็ก (n2≠n1) จากนั้นความถี่นี้เรียกว่าอะซิงโครนัส ในมอเตอร์แบบอะซิงโครนัส เวิร์กโฟลว์สามารถทำงานได้ที่ความถี่แบบอะซิงโครนัสเท่านั้น
ระหว่างการทำงาน ความเร็วของโรเตอร์จะน้อยกว่าความเร็วของสนามเสมอ
(n2< n1)
1.2 หลักการทำงานของมอเตอร์แบบอะซิงโครนัส
ในมอเตอร์แบบอะซิงโครนัส สนามแม่เหล็กหมุนถูกสร้างขึ้นโดยระบบสามเฟสเมื่อเชื่อมต่อกับเครือข่ายกระแสสลับ สนามแม่เหล็กหมุนของสเตเตอร์ตัดผ่านตัวนำของขดลวดโรเตอร์และเหนี่ยวนำให้เกิดแรงเคลื่อนไฟฟ้าในนั้น หากขดลวดของโรเตอร์ถูกปิดโดยมีความต้านทานหรือไฟฟ้าลัดวงจร แสดงว่าอยู่ภายใต้การกระทำของแรงเคลื่อนไฟฟ้าเหนี่ยวนำ ผ่านปัจจุบัน อันเป็นผลมาจากปฏิสัมพันธ์ของกระแสในโรเตอร์ที่คดเคี้ยวด้วยการหมุน สนามแม่เหล็กขดลวดสเตเตอร์สร้างแรงบิดภายใต้อิทธิพลที่โรเตอร์เริ่มหมุนไปในทิศทางการหมุนของสนามแม่เหล็ก ในการเปลี่ยนทิศทางการหมุนของโรเตอร์ จำเป็นต้องสลับสายไฟสองในสามสายที่เชื่อมต่อขดลวดสเตเตอร์กับเครือข่ายโดยสัมพันธ์กับขั้วต่อเครือข่าย
1.3 อุปกรณ์ของมอเตอร์แบบอะซิงโครนัส
แกนสเตเตอร์คัดเลือกจากแผ่นเหล็กหนา 0.35 หรือ 0.5 มม. เพลทถูกประทับตราด้วยร่องและยึดเข้ากับโครงเครื่องยนต์ เตียงถูกติดตั้งบนฐานราก ตัวนำของขดลวดถูกวางในร่องตามยาวของสเตเตอร์ซึ่งเชื่อมต่อถึงกันเพื่อให้เกิดระบบสามเฟสขึ้น ในการเชื่อมต่อขดลวดสเตเตอร์กับเครือข่ายสามเฟส พวกเขาสามารถเชื่อมต่อกับดาวหรือเดลต้า ทำให้สามารถเปิดมอเตอร์ในเครือข่ายที่มีแรงดันไฟฟ้าต่างกันได้ สำหรับแรงดันไฟฟ้าที่ต่ำกว่า (220/127 V) ขดลวดสเตเตอร์จะเชื่อมต่อเป็นรูปสามเหลี่ยมสำหรับแรงดันไฟฟ้าที่สูงขึ้น (380/220 V) - ในดาว แกนโรเตอร์ทำจากแผ่นเหล็กหนา 0.5 มม. เพลตถูกประทับตราด้วยร่องและประกอบเป็นแพ็คเกจที่ติดตั้งบนเพลาของเครื่อง กระบอกสูบที่มีร่องตามยาวถูกสร้างขึ้นจากบรรจุภัณฑ์ซึ่งวางตัวนำของขดลวดโรเตอร์ ขึ้นอยู่กับชนิดของขดลวดโรเตอร์ เครื่องแบบอะซิงโครนัสสามารถเป็นได้ โรเตอร์เฟสและกรงกระรอกไม่สามารถรวมความต้านทานในขดลวดลัดวงจรได้ ในการพันเฟส ตัวนำจะเชื่อมต่อกัน ก่อตัวเป็นระบบสามเฟส ขดลวด สามขั้นตอนเชื่อมต่อกันด้วยดวงดาว ขดลวดโรเตอร์สามารถลัดวงจรหรือลัดวงจรได้ มอเตอร์ที่มีโรเตอร์แบบกรงกระรอกนั้นง่ายกว่าและถูกกว่า แต่มอเตอร์ที่มีโรเตอร์แบบเฟสจะมีคุณสมบัติในการสตาร์ทและควบคุมที่ดีกว่า (ใช้ที่กำลังสูง) พลังของมอเตอร์แบบอะซิงโครนัสมีตั้งแต่หลายสิบวัตต์ถึง 15,000 กิโลวัตต์ที่แรงดันไฟฟ้าที่ขดลวดสเตเตอร์สูงถึง 6 kV ข้อเสียของมอเตอร์แบบอะซิงโครนัสคือปัจจัยด้านพลังงานต่ำ
1.4 การทำงานของมอเตอร์แบบอะซิงโครนัสภายใต้ภาระ
n1คือ ความถี่การหมุนของสนามแม่เหล็กสเตเตอร์ n2- ความถี่ของการหมุนของโรเตอร์
n1 >n2
สนามแม่เหล็กสเตเตอร์หมุนไปในทิศทางเดียวกับโรเตอร์และเลื่อนสัมพันธ์กับโรเตอร์ด้วยความถี่ ns= n1 – n2
ความล่าช้าของโรเตอร์จากสนามแม่เหล็กหมุนของสเตเตอร์มีลักษณะเป็นสลิป S= ns / n1, => S = (n1 - n2) / n1
หากโรเตอร์อยู่กับที่ ดังนั้น n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
หากโรเตอร์หมุนพร้อมกันกับสนามแม่เหล็ก สลิป S= 0
ขณะเดินเบา นั่นคือ เมื่อไม่มีโหลดบนเพลามอเตอร์ สลิปจะเล็กน้อยและสามารถรับได้เท่ากับ 0 โหลดบนเพลาโรเตอร์สามารถเป็น เช่น เครื่องตัดกลึง มันสร้างแรงบิดในการเบรก หากแรงบิดและแรงบิดเบรกเท่ากัน มอเตอร์จะทำงานอย่างเสถียร หากภาระบนเพลาเพิ่มขึ้น แรงบิดในการเบรกจะมากกว่าแรงบิดและความเร็วของโรเตอร์ n2ลด. ตามสูตร S =(n1 - n2) / n1สลิปจะเพิ่มขึ้น เนื่องจากสนามแม่เหล็กของสเตเตอร์เลื่อนสัมพันธ์กับโรเตอร์ด้วยความถี่ ns= n1 – n2,จากนั้นมันจะข้ามตัวนำของโรเตอร์บ่อยขึ้นกระแสและแรงบิดของมอเตอร์จะเพิ่มขึ้นซึ่งในไม่ช้าจะเท่ากับแรงบิดเบรก เมื่อภาระลดลง แรงบิดเบรกจะน้อยกว่าแรงบิด เพิ่มขึ้น n2และลดลง เอส EMF ลดลงและกระแสของโรเตอร์และแรงบิดจะเท่ากับเบรกอีกครั้ง ฟลักซ์แม่เหล็กในช่องว่างอากาศของเครื่องจะคงที่โดยประมาณสำหรับการเปลี่ยนแปลงใดๆ ของโหลด
2. ลักษณะสมรรถนะของมอเตอร์แบบอะซิงโครนัส
ประสิทธิภาพของมอเตอร์เหนี่ยวนำขึ้นอยู่กับ
S - ลื่น
n2 - ความเร็วโรเตอร์
M - ช่วงเวลาที่พัฒนา
I1 การบริโภคในปัจจุบัน
อินพุตไฟ P1
COSφตัวประกอบกำลัง
จากขุมพลัง P2 บนเพลาเครื่อง
ลักษณะเหล่านี้จะถูกลบออกภายใต้สภาพธรรมชาติ ความถี่ปัจจุบัน f1 และแรงดันไฟฟ้า U1 ยังคงที่ เฉพาะโหลดบนเพลามอเตอร์เท่านั้นที่เปลี่ยนไป
เมื่อภาระบนเพลามอเตอร์เพิ่มขึ้น S จะเพิ่มขึ้น เมื่อเครื่องยนต์เดินเบา n2≈n1 และ S≈0 ที่พิกัดโหลด โดยปกติสลิปจะอยู่ที่ 3 ถึง 5%
เมื่อโหลดบนเพลามอเตอร์เพิ่มขึ้น ความเร็วในการหมุน n2 จะลดลง อย่างไรก็ตาม การเปลี่ยนแปลงความเร็วเมื่อโหลดเพิ่มขึ้นจาก 0 เป็นค่าเล็กน้อยนั้นน้อยมากและไม่เกิน 5% ดังนั้นลักษณะความเร็วของมอเตอร์เหนี่ยวนำจึงแข็ง เส้นโค้งมีความชันเล็กน้อยมากถึงแกนนอน
แรงบิด เอ็มที่พัฒนาโดยเครื่องยนต์ สมดุลด้วยแรงบิดเบรกบนเพลา ภูเขาและชั่วขณะ เอ็ม0จะเอาชนะความสูญเสียทางกล นั่นคือ M \u003d ภูเขา + M0 \u003d P2 /Ω2+ М0, ที่ไหน R2– กำลังเครื่องยนต์ที่มีประโยชน์ , Ω 2 - ความเร็วเชิงมุมของโรเตอร์ ที่ไม่ได้ใช้งาน ม= M0.เมื่อโหลดเพิ่มขึ้น แรงบิดก็เพิ่มขึ้นด้วย และเนื่องจากความเร็วของโรเตอร์ลดลงเล็กน้อย แรงบิดที่เพิ่มขึ้นจึงเกิดขึ้นเร็วกว่ากำลังที่มีประโยชน์บนเพลา
I1 ปัจจุบันที่มอเตอร์ใช้จากเครือข่ายจะแปรผันไม่เท่ากันตามภาระที่เพิ่มขึ้นบนเพลามอเตอร์ เมื่อไม่ได้ใช้งาน ตัวประกอบกำลัง COSφ จะมีขนาดเล็ก และกระแสมีองค์ประกอบปฏิกิริยาขนาดใหญ่ ที่โหลดต่ำบนเพลามอเตอร์ ส่วนประกอบแอคทีฟของกระแสสเตเตอร์จะน้อยกว่าส่วนประกอบที่ทำปฏิกิริยา ดังนั้นส่วนประกอบแอคทีฟของกระแสจึงมีผลเพียงเล็กน้อยต่อ I1 ปัจจุบัน ที่โหลดสูง ส่วนประกอบแอ็คทีฟของกระแสสเตเตอร์จะมีขนาดใหญ่กว่ารีแอกทีฟ และการเปลี่ยนแปลงของโหลดทำให้เกิดการเปลี่ยนแปลงที่สำคัญใน I1 ปัจจุบัน
การพึ่งพากราฟิคของพลังงานที่ใช้โดยมอเตอร์ P1 นั้นแสดงให้เห็นเป็นเส้นตรงเกือบเบี่ยงเบนขึ้นเล็กน้อยที่โหลดสูงซึ่งอธิบายได้จากการสูญเสียที่เพิ่มขึ้นในสเตเตอร์และขดลวดโรเตอร์ที่มีภาระเพิ่มขึ้น
การพึ่งพาตัวประกอบกำลัง COSφ กับโหลดบนเพลามอเตอร์มีดังนี้ ที่ไม่ได้ใช้งาน СOSφ มีขนาดเล็กประมาณ 0.2 เนื่องจากส่วนประกอบที่ทำงานอยู่ของกระแสสเตเตอร์เนื่องจากการสูญเสียพลังงานในเครื่องจึงมีขนาดเล็กเมื่อเทียบกับส่วนประกอบที่ทำปฏิกิริยาของกระแสซึ่งสร้างฟลักซ์แม่เหล็ก ด้วยการเพิ่มภาระบนเพลา СOSφ เพิ่มขึ้นถึงค่าสูงสุด 0.8–0.9 อันเป็นผลมาจากการเพิ่มขึ้นของส่วนประกอบที่ใช้งานของกระแสสเตเตอร์ ที่โหลดที่สูงมาก COSφ จะลดลงเล็กน้อยเนื่องจากเป็นผลมาจากการเพิ่มขึ้นอย่างมากในความถี่การลื่นและกระแสในโรเตอร์ ค่ารีแอกแตนซ์ของขดลวดของโรเตอร์จะเพิ่มขึ้น
กราฟแสดงประสิทธิภาพ η มีรูปแบบเดียวกับในเครื่องจักรหรือหม้อแปลงไฟฟ้าใดๆ เมื่อไม่ได้ใช้งาน ประสิทธิภาพ = 0 ด้วยการเพิ่มภาระบนเพลามอเตอร์ประสิทธิภาพจะเพิ่มขึ้นอย่างรวดเร็วแล้วลดลง ประสิทธิภาพถึงค่าสูงสุดที่โหลดดังกล่าว เมื่อการสูญเสียพลังงานในเหล็กและการสูญเสียทางกลซึ่งไม่ขึ้นอยู่กับโหลด เท่ากับการสูญเสียพลังงานในขดลวดสเตเตอร์และโรเตอร์ซึ่งขึ้นอยู่กับโหลด
บทคัดย่อที่คล้ายกัน:
ไมโครมอเตอร์สำหรับผู้บริหารแบบอะซิงโครนัสรุ่นต่างๆ: พร้อมโรเตอร์แบบกลวงที่ไม่ใช่แม่เหล็กและแบบแม่เหล็ก ด้วยขดลวดลัดวงจรเหมือนล้อกระรอก แบบแผนของร่องครึ่งปิดของวงจรแม่เหล็ก การสร้างสนามแม่เหล็กหมุนโดยสเตเตอร์สองเฟส
อุปกรณ์ของเครื่องอะซิงโครนัสสามเฟส, องค์ประกอบหลัก, โหมดและหลักการทำงาน, ประวัติการสร้างและการใช้งาน เวทีปัจจุบัน. ขั้นตอนและเงื่อนไขในการรับสนามแม่เหล็กหมุน การพึ่งพาแรงบิดแม่เหล็กไฟฟ้าบนสลิป
การหาโมเมนต์ความเฉื่อยรวมของกระปุกเกียร์ เครื่องกว้าน และโหลดลดลงเหลือเพลามอเตอร์ การคำนวณโมเมนต์ความต้านทานลดลงถึงเพลาระหว่างการขึ้นลง ค่ากำลังบนเพลากระปุก สาเหตุของความแตกต่างของกำลังเมื่อยกและลดภาระ
การคำนวณและการออกแบบมอเตอร์ การเลือกขนาดหลัก การคำนวณขดลวดสเตเตอร์ การคำนวณขนาดของโซนฟันของสเตเตอร์และการเลือกช่องว่างอากาศ การสร้างแบบจำลองเครื่องยนต์ในสภาพแวดล้อมของ MatLab Power System Blockset เช่นเดียวกับพารามิเตอร์โหมดเล็กน้อย
การป้องกันหลักและสำรองของเทอร์โบเจนเนอเรเตอร์
อุปกรณ์และอิมเมจเงื่อนไขของซิงโครนัส เครื่องสามเฟส. ตำแหน่งของขั้วสนามแม่เหล็กของสเตเตอร์และโรเตอร์ การพึ่งพาแรงบิดแม่เหล็กไฟฟ้าของเครื่องซิงโครนัสที่มุม รูปแบบของการรวมมอเตอร์ซิงโครนัสในการเบรกแบบไดนามิก
ข้อมูลทั่วไปเกี่ยวกับเครื่องอะซิงโครนัส (สองคดเคี้ยว เครื่องจักรไฟฟ้า กระแสสลับ). การออกแบบชิ้นส่วนแอคทีฟ ส่วนประกอบแบริ่ง อุปกรณ์อินพุตของไมโครมอเตอร์แบบอะซิงโครนัส 4АА50В2 หลักการทำงาน ขอบเขตการใช้งานและความสำคัญ
การออกแบบมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามเฟสด้วย โรเตอร์กรงกระรอก. ทางเลือกของมอเตอร์อะนาล็อก ขนาด โครงแบบ วัสดุวงจรแม่เหล็ก การหาค่าสัมประสิทธิ์การพันของสเตเตอร์ การคำนวณทางกลของเพลาและตลับลูกปืนกลิ้ง
การคำนวณมอเตอร์แบบอะซิงโครนัสกับโรเตอร์กรงกระรอก ทางเลือกของขนาดหลัก การคำนวณขนาดของโซนฟันของสเตเตอร์และช่องว่างอากาศ, โรเตอร์, กระแสแม่เหล็ก พารามิเตอร์โหมดการทำงาน การคำนวณความสูญเสีย ลักษณะการทำงานและการเริ่มต้น
ข้อมูลทั่วไปเกี่ยวกับเครื่องอะซิงโครนัส ข้อมูลทั่วไปเกี่ยวกับโหมดการทำงานของมอเตอร์แบบอะซิงโครนัส คำจำกัดความเชิงวิเคราะห์และแบบกราฟิกของโหมดการทำงานของเครื่องสร้างใหม่แบบอะซิงโครนัส
คุณสมบัติของการพัฒนามอเตอร์ไฟฟ้าแบบอะซิงโครนัสพร้อมโรเตอร์แบบกรงกระรอก 4А160S4У3 ตามเครื่องจักรทั่วไป การคำนวณแบบจำลองทางคณิตศาสตร์ของมอเตอร์แบบอะซิงโครนัสในรูปแบบของ Cauchy 5 ความเพียงพอของแบบจำลองการเริ่มต้นโดยตรงของมอเตอร์แบบอะซิงโครนัส
วิธีการคำนวณวงจรแม่เหล็ก เครื่องกำเนิดไฟฟ้าแบบซิงโครนัส, ทางเลือกของขนาดและการกำหนดค่า, การสร้างลักษณะของการทำให้เป็นแม่เหล็กของเครื่อง การกำหนดพารามิเตอร์ของขดลวด ประสิทธิภาพของการคำนวณความร้อนและการระบายอากาศ แบบประกอบของเครื่องกำเนิดไฟฟ้า
ไม่สามารถยอมรับได้หลายรายการ การเริ่มต้นแบบอะซิงโครนัสมอเตอร์ซิงโครนัสซึ่งนำไปสู่แรงดันไฟฟ้าตกที่สำคัญในระบบจ่าย ทำให้เกิดแรงแบบไดนามิกที่สำคัญในส่วนหน้าของขดลวดสเตเตอร์และอายุความร้อนของฉนวน
การสร้างแผนภาพโหลดของแอคชูเอเตอร์ การเลือกองค์ประกอบของวงจรไฟฟ้า การคำนวณลักษณะทางกล การประเมินความจำเป็นในการป้อนกลับความเร็ว การกำหนดประสิทธิภาพเฉลี่ยของระบบ กระบวนการชั่วคราวในไดรฟ์
ข้อมูลทั่วไปเกี่ยวกับอุปกรณ์ การควบคุมอัตโนมัติการกระตุ้นของเครื่องซิงโครนัส ปัจจัยที่มีผลต่อแรงดันไฟและวงจรจ่ายไฟ อุปกรณ์ผสมปัจจุบัน: การเปลี่ยนแปลงที่จำเป็นในลักษณะของเครื่องผสม
วงจรแม่เหล็กของมอเตอร์ ขนาด การกำหนดค่า วัสดุ แกนสเตเตอร์ โรเตอร์ และชิ้นขั้ว การคำนวณวงจรแม่เหล็ก ช่องว่างอากาศ ฟัน และสเตเตอร์กลับ ใช้งานอยู่และ ปฏิกิริยาอุปนัยขดลวดสเตเตอร์สำหรับสภาวะคงตัว
ทำงานด้านวิศวกรรมไฟฟ้า
"ลักษณะการทำงานของมอเตอร์แบบอะซิงโครนัส"
บทนำ
อะซิงโครนัส เครื่องไฟฟ้า- เป็นเครื่องไฟฟ้ากระแสสลับซึ่งความเร็วของโรเตอร์ไม่เท่ากับความเร็วของสนามแม่เหล็กสเตเตอร์และขึ้นอยู่กับโหลด ส่วนใหญ่จะใช้เป็นเครื่องยนต์และเป็นเครื่องกำเนิดไฟฟ้า สเตเตอร์มีร่องซึ่งมีการพันขดลวดแบบเฟสเดียวหรือหลายเฟส ขดลวดนี้ออกแบบมาเพื่อสร้างสนามแม่เหล็กเคลื่อนที่ หมุนเป็นวงกลม - สำหรับเครื่องจักรสามเฟสและรูปวงรีที่เต้นเป็นจังหวะหรือหมุนเป็นวงรี - สำหรับเครื่องจักรแบบเฟสเดียว โรเตอร์เป็นส่วนหมุนของเครื่องจักรไฟฟ้า ซึ่งได้รับการออกแบบเพื่อสร้างสนามแม่เหล็กด้วย ซึ่งเมื่อทำปฏิกิริยากับสนามสเตเตอร์ จะนำไปสู่การสร้างแรงบิดแม่เหล็กไฟฟ้าที่กำหนดทิศทางของการแปลงพลังงาน สำหรับเครื่องปั่นไฟ ช่วงเวลานี้เป็นลักษณะการเบรก ซึ่งจะต่อต้านแรงบิดของตัวเสนอญัตติสำคัญ ซึ่งทำให้โรเตอร์เคลื่อนที่ ในทางกลับกัน สำหรับเครื่องยนต์ ช่วงเวลานี้กำลังขับเคลื่อน โดยเอาชนะแรงต้านของกลไกที่ขับเคลื่อนด้วยโรเตอร์
เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสเป็นเครื่องไฟฟ้าแบบอะซิงโครนัสที่ทำงานในโหมดเครื่องกำเนิดไฟฟ้า แหล่งเสริม กระแสไฟฟ้าพลังงานต่ำและอุปกรณ์เบรก (ในไดรฟ์ไฟฟ้า)
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสเป็นเครื่องไฟฟ้าแบบอะซิงโครนัสที่ทำงานในโหมดมอเตอร์ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามเฟสที่พบมากที่สุด (คิดค้นในปี พ.ศ. 2432 โดย MO Dolivo-Dobrovolsky) มอเตอร์แบบอะซิงโครนัสค่อนข้างเรียบง่ายในการออกแบบและใช้งานได้อย่างน่าเชื่อถือ แต่มีช่วงความเร็วที่จำกัดและตัวประกอบกำลังไฟฟ้าต่ำที่โหลดเบา กำลังจากเศษส่วนของ W ถึงหลายสิบ MW
1. มอเตอร์แบบอะซิงโครนัส
1.1 ความถี่การหมุนของสนามแม่เหล็กและโรเตอร์
อนุญาต น 1 คือ ความถี่การหมุนของสนามแม่เหล็ก ระบบกระแสสลับแบบหลายเฟสจะสร้างสนามแม่เหล็กหมุน ซึ่งความเร็วรอบต่อนาทีคือ n1=60f1/p โดยที่ f1 คือความถี่ของกระแส p คือจำนวนคู่ขั้วที่เกิดจากแต่ละเฟสของสเตเตอร์ คดเคี้ยว
น 2 - ความถี่ของการหมุนของโรเตอร์ หากโรเตอร์หมุนด้วยความถี่ไม่เท่ากับความถี่ของการหมุนของสนามแม่เหล็ก (n2≠n1) ความถี่นี้จะเรียกว่าอะซิงโครนัส ในมอเตอร์แบบอะซิงโครนัส เวิร์กโฟลว์สามารถทำงานได้ที่ความถี่แบบอะซิงโครนัสเท่านั้น
ระหว่างการทำงาน ความเร็วของโรเตอร์จะน้อยกว่าความเร็วของสนามเสมอ
( น 2< น 1)
1.2 หลักการทำงานของมอเตอร์แบบอะซิงโครนัส
ในมอเตอร์แบบอะซิงโครนัส สนามแม่เหล็กหมุนถูกสร้างขึ้นโดยระบบสามเฟสเมื่อเชื่อมต่อกับเครือข่ายกระแสสลับ สนามแม่เหล็กหมุนของสเตเตอร์ตัดผ่านตัวนำของขดลวดโรเตอร์และเหนี่ยวนำให้เกิดแรงเคลื่อนไฟฟ้าในนั้น หากขดลวดของโรเตอร์ถูกปิดโดยมีความต้านทานหรือไฟฟ้าลัดวงจร แสดงว่าอยู่ภายใต้การกระทำของแรงเคลื่อนไฟฟ้าเหนี่ยวนำ ผ่านปัจจุบัน อันเป็นผลมาจากการทำงานร่วมกันของกระแสในขดลวดโรเตอร์กับสนามแม่เหล็กหมุนของขดลวดสเตเตอร์ทำให้เกิดแรงบิดภายใต้อิทธิพลที่โรเตอร์เริ่มหมุนไปในทิศทางของการหมุนของสนามแม่เหล็ก ในการเปลี่ยนทิศทางการหมุนของโรเตอร์ จำเป็นต้องสลับสายไฟสองในสามสายที่เชื่อมต่อขดลวดสเตเตอร์กับเครือข่ายโดยสัมพันธ์กับขั้วต่อเครือข่าย
1.3 อุปกรณ์ของมอเตอร์แบบอะซิงโครนัส
แกนสเตเตอร์คัดเลือกจากแผ่นเหล็กหนา 0.35 หรือ 0.5 มม. เพลทถูกประทับตราด้วยร่องและยึดเข้ากับโครงเครื่องยนต์ เตียงถูกติดตั้งบนฐานราก ตัวนำของขดลวดถูกวางในร่องตามยาวของสเตเตอร์ซึ่งเชื่อมต่อถึงกันเพื่อให้เกิดระบบสามเฟสขึ้น ในการเชื่อมต่อขดลวดสเตเตอร์กับ เครือข่ายสามเฟสพวกเขาสามารถเชื่อมต่อกับดาวหรือเดลต้า ทำให้สามารถเปิดมอเตอร์ในเครือข่ายที่มีแรงดันไฟฟ้าต่างกันได้ สำหรับแรงดันไฟฟ้าที่ต่ำกว่า (220/127 V) ขดลวดสเตเตอร์จะเชื่อมต่อเป็นรูปสามเหลี่ยมสำหรับแรงดันไฟฟ้าที่สูงขึ้น (380/220 V) - ในดาว แกนโรเตอร์ทำจากแผ่นเหล็กหนา 0.5 มม. เพลตถูกประทับตราด้วยร่องและประกอบเป็นแพ็คเกจที่ติดตั้งบนเพลาของเครื่อง กระบอกสูบที่มีร่องตามยาวถูกสร้างขึ้นจากบรรจุภัณฑ์ซึ่งวางตัวนำของขดลวดโรเตอร์ ขึ้นอยู่กับชนิดของขดลวดโรเตอร์ เครื่องอะซิงโครนัสอาจจะอยู่กับ เฟสและไฟฟ้าลัดวงจร โรเตอร์ไม่สามารถรวมความต้านทานในขดลวดลัดวงจรได้ ในการพันเฟส ตัวนำจะเชื่อมต่อกัน ก่อตัวเป็นระบบสามเฟส ขดลวดของสามเฟสเชื่อมต่อกันด้วยดาว ขดลวดโรเตอร์สามารถลัดวงจรหรือลัดวงจรได้ มอเตอร์ที่มีโรเตอร์แบบกรงกระรอกนั้นง่ายกว่าและถูกกว่า แต่มอเตอร์ที่มีโรเตอร์แบบเฟสจะมีคุณสมบัติในการสตาร์ทและควบคุมที่ดีกว่า (ใช้ที่กำลังสูง) พลังของมอเตอร์แบบอะซิงโครนัสมีตั้งแต่หลายสิบวัตต์ถึง 15,000 กิโลวัตต์ที่แรงดันไฟฟ้าที่ขดลวดสเตเตอร์สูงถึง 6 kV ข้อเสียของมอเตอร์แบบอะซิงโครนัสคือปัจจัยด้านพลังงานต่ำ
1.4 การทำงานของมอเตอร์แบบอะซิงโครนัสภายใต้ภาระ
น 1 คือ ความถี่การหมุนของสนามแม่เหล็กสเตเตอร์ น 2 - ความถี่ของการหมุนของโรเตอร์
น 1 > น 2
สนามแม่เหล็กสเตเตอร์หมุนไปในทิศทางเดียวกับโรเตอร์และเลื่อนสัมพันธ์กับโรเตอร์ด้วยความถี่ น ส = น 1 – น 2
ความล่าช้าของโรเตอร์จากสนามแม่เหล็กหมุนของสเตเตอร์มีลักษณะเป็นสลิป ส = น ส / น 1, => ส = ( น 1 – น 2) / น 1
หากโรเตอร์อยู่กับที่ ดังนั้น น 2 =0, ส = ( น 1 – น 2) / น 1, => ส = น 1 / น 1 =1
หากโรเตอร์หมุนพร้อมกันกับสนามแม่เหล็ก สลิป S= 0
ที่รอบเดินเบานั่นคือในกรณีที่ไม่มีโหลดบนเพลามอเตอร์การลื่นนั้นเล็กน้อยและสามารถรับได้เท่ากับ 0 ภาระบนเพลาโรเตอร์สามารถเป็นเช่นเครื่องตัด กลึง. มันสร้างแรงบิดในการเบรก หากแรงบิดและแรงบิดเบรกเท่ากัน มอเตอร์จะทำงานอย่างเสถียร หากภาระบนเพลาเพิ่มขึ้น แรงบิดในการเบรกจะมากกว่าแรงบิดและความเร็วของโรเตอร์ น 2 ลด. ตามสูตร ส = ( น 1 – น 2) / น 1 สลิปจะเพิ่มขึ้น เนื่องจากสนามแม่เหล็กของสเตเตอร์เลื่อนสัมพันธ์กับโรเตอร์ด้วยความถี่ น ส = น 1 – น 2, จากนั้นมันจะข้ามตัวนำของโรเตอร์บ่อยขึ้นกระแสและแรงบิดของมอเตอร์จะเพิ่มขึ้นซึ่งในไม่ช้าจะเท่ากับแรงบิดเบรก เมื่อภาระลดลง แรงบิดเบรกจะน้อยกว่าแรงบิด เพิ่มขึ้น น 2 และลดลง ส . EMF ลดลงและกระแสของโรเตอร์และแรงบิดจะเท่ากับเบรกอีกครั้ง ฟลักซ์แม่เหล็กในช่องว่างอากาศของเครื่องจะคงที่โดยประมาณสำหรับการเปลี่ยนแปลงใดๆ ของโหลด
2. ลักษณะสมรรถนะของมอเตอร์แบบอะซิงโครนัส
ประสิทธิภาพของมอเตอร์เหนี่ยวนำขึ้นอยู่กับ
S - ลื่น
n2 - ความเร็วโรเตอร์
M - ช่วงเวลาที่พัฒนา
I1 การบริโภคในปัจจุบัน
อินพุตไฟ P1
COSφตัวประกอบกำลัง
จากขุมพลัง P2 บนเพลาเครื่อง
ลักษณะเหล่านี้จะถูกลบออกภายใต้สภาพธรรมชาติ ความถี่ปัจจุบัน f1 และแรงดันไฟฟ้า U1 ยังคงที่ เฉพาะโหลดบนเพลามอเตอร์เท่านั้นที่เปลี่ยนไป
เมื่อภาระบนเพลามอเตอร์เพิ่มขึ้น S จะเพิ่มขึ้น เมื่อเครื่องยนต์เดินเบา n2≈n1 และ S≈0 ที่พิกัดโหลด โดยปกติสลิปจะอยู่ที่ 3 ถึง 5%
เมื่อโหลดบนเพลามอเตอร์เพิ่มขึ้น ความเร็วในการหมุน n2 จะลดลง อย่างไรก็ตาม การเปลี่ยนแปลงความเร็วเมื่อโหลดเพิ่มขึ้นจาก 0 เป็นค่าเล็กน้อยนั้นน้อยมากและไม่เกิน 5% นั่นเป็นเหตุผลที่ ลักษณะความเร็วมอเตอร์เหนี่ยวนำนั้นยาก เส้นโค้งมีความชันเล็กน้อยมากถึงแกนนอน
แรงบิด เอ็มที่พัฒนาโดยเครื่องยนต์ สมดุลด้วยแรงบิดเบรกบนเพลา ภูเขาและชั่วขณะ เอ็ม 0 จะเอาชนะความสูญเสียทางกล นั่นคือ M= ภูเขา + M 0 =ป 2 /Ω 2 + เอ็ม 0 , ที่ไหน R 2 – กำลังเครื่องยนต์ที่มีประโยชน์ , Ω 2 - ความเร็วเชิงมุมของโรเตอร์ ที่ไม่ได้ใช้งาน M=M 0. เมื่อโหลดเพิ่มขึ้น แรงบิดก็เพิ่มขึ้นด้วย และเนื่องจากความเร็วของโรเตอร์ลดลงเล็กน้อย แรงบิดที่เพิ่มขึ้นจึงเกิดขึ้นเร็วกว่ากำลังที่มีประโยชน์บนเพลา
I1 ปัจจุบันที่มอเตอร์ใช้จากเครือข่ายจะแปรผันไม่เท่ากันตามภาระที่เพิ่มขึ้นบนเพลามอเตอร์ เมื่อไม่ได้ใช้งาน ตัวประกอบกำลังของCOSφจะมีขนาดเล็ก และกระแสมีองค์ประกอบปฏิกิริยาขนาดใหญ่ ที่โหลดต่ำบนเพลามอเตอร์ ส่วนประกอบแอคทีฟของกระแสสเตเตอร์จะน้อยกว่าส่วนประกอบที่ทำปฏิกิริยา ดังนั้นส่วนประกอบแอคทีฟของกระแสจึงมีผลเพียงเล็กน้อยต่อ I1 ปัจจุบัน ที่โหลดสูง ส่วนประกอบแอ็คทีฟของกระแสสเตเตอร์จะมีขนาดใหญ่กว่ารีแอกทีฟ และการเปลี่ยนแปลงของโหลดทำให้เกิดการเปลี่ยนแปลงที่สำคัญใน I1 ปัจจุบัน
การพึ่งพากราฟิคของพลังงานที่ใช้โดยมอเตอร์ P1 นั้นแสดงให้เห็นเป็นเส้นตรงเกือบเบี่ยงเบนขึ้นเล็กน้อยที่โหลดสูงซึ่งอธิบายได้จากการสูญเสียที่เพิ่มขึ้นในสเตเตอร์และขดลวดของโรเตอร์ด้วยภาระที่เพิ่มขึ้น
การพึ่งพาตัวประกอบกำลัง COSφ กับโหลดบนเพลามอเตอร์มีดังนี้ ที่ไม่ได้ใช้งาน СOSφ มีขนาดเล็กประมาณ 0.2 เนื่องจากส่วนประกอบที่ทำงานอยู่ของกระแสสเตเตอร์เนื่องจากการสูญเสียพลังงานในเครื่องจึงมีขนาดเล็กเมื่อเทียบกับส่วนประกอบที่ทำปฏิกิริยาของกระแสซึ่งสร้างฟลักซ์แม่เหล็ก ด้วยการเพิ่มภาระบนเพลา СOSφ เพิ่มขึ้นถึงค่าสูงสุด 0.8–0.9 อันเป็นผลมาจากการเพิ่มขึ้นของส่วนประกอบที่ใช้งานของกระแสสเตเตอร์ ที่โหลดที่สูงมาก COSφ จะลดลงเล็กน้อยเนื่องจากเป็นผลมาจากการเพิ่มขึ้นอย่างมากในความถี่การลื่นและกระแสในโรเตอร์ ค่ารีแอกแตนซ์ของขดลวดของโรเตอร์จะเพิ่มขึ้น
กราฟแสดงประสิทธิภาพ η มีรูปแบบเดียวกับในเครื่องจักรหรือหม้อแปลงไฟฟ้าใดๆ เมื่อไม่ได้ใช้งาน ประสิทธิภาพ = 0 ด้วยการเพิ่มภาระบนเพลามอเตอร์ประสิทธิภาพจะเพิ่มขึ้นอย่างรวดเร็วแล้วลดลง คุ้มสุดๆประสิทธิภาพมาถึงที่ภาระดังกล่าว เมื่อการสูญเสียพลังงานในเหล็กและการสูญเสียทางกลซึ่งไม่ขึ้นอยู่กับโหลด เท่ากับการสูญเสียพลังงานในขดลวดสเตเตอร์และโรเตอร์ซึ่งขึ้นอยู่กับโหลด
โมเมนต์แม่เหล็กไฟฟ้า
.
สมบูรณ์ พลังงานกลเครื่องยนต์
เกิดขึ้นจากการหมุนของโรเตอร์ด้วยความเร็วเชิงมุม ω 2 ภายใต้การกระทำของโมเมนต์ M em i.e.
P ขน \u003d M em ω 2 (2.19)
กำลังนี้สามารถหาได้จากวงจรสมมูลเช่น พลังงานไฟฟ้าซึ่งโดดเด่นในเรื่องความต้านทานโหลดตามเงื่อนไข R ดี " คูณด้วยจำนวนเฟสสเตเตอร์:
P fur = m 1 (I 2 ") 2 R 2" (1-s) / s (2.20)
ตาม (2.19) และ (2.20) โดยคำนึงถึง (2.8) เราสามารถเขียน
M em \u003d (ม. 1 (ฉัน 2 ") 2 R 2 " / s) / ω 1 (2.21)
เมื่อคำนวณโมเมนต์ตามสูตร (2.21) กระแส ฉัน 2"ถูกกำหนดโดยวงจรสมมูล (รูปที่ 2.10) สำหรับสลิปที่สอดคล้องกัน
สูตร (2.21) สามารถแปลงได้โดยการแทนที่นิพจน์สำหรับกระแส ฉัน 2", ได้ภายใต้สมมติฐานบางประการจากวงจรสมมูล
M em \u003d (m 1 U 1 R 2 "/s) / ω 1 ((R 1 + CR 2 / s) 2 + (x 1 + Cx 2 ") 2) (2.22)
ค่าสัมประสิทธิ์ คซึ่งเข้าสู่สูตร (2.22) คือโมดูลัส ค่าสัมประสิทธิ์เชิงซ้อน จาก
= 1 + (z 1 /zม.)ที่ปรากฏในระหว่างการแปลง สมมุติฐานให้พิจารณาเฉพาะโมดูลัสของสัมประสิทธิ์ จาก
, เพราะ อาร์กิวเมนต์ในเครื่องจริงมีขนาดเล็กมาก ในเครื่องจักรจริง (ไม่รวมไมโครแมชชีน) จาก
= 1.03–1.08 และที่ การวิเคราะห์เชิงคุณภาพบางครั้งก็ใช้ จาก
=
1.
นิพจน์ (2.21) สามารถแปลงได้โดยการแสดงแรงดันตกคร่อมในโรเตอร์ ฉัน 2 "R 2" / sผ่าน EMF ตามสูตร (2.15) และ (2.16)
ผม 2 "R 2" /s \u003d E 2 "cos ψ 2 (2.23)
แทนที่ (2.23) เป็น (2.21) และดำเนินการแปลงโดยคำนึงถึง (2.18) และ (2.12) เราได้รับ
M em \u003d k F ม. ฉัน 2 "cos ψ 2 (2.24)
ที่ไหน k- ค่าสัมประสิทธิ์เชิงสร้างสรรค์
ดังที่เห็นได้จาก (2.24) โมเมนต์แม่เหล็กไฟฟ้าเป็นสัดส่วนโดยตรงกับฟลักซ์แม่เหล็กหลัก F mและส่วนประกอบที่ใช้งานของกระแสโรเตอร์ ฉัน 2" คอส ψ 2.
ได้สูตรแรงบิด (2.21), (2.22) และ (2.24) สำหรับโหมดมอเตอร์ แต่ก็ใช้ได้กับโหมดอื่นเช่นกัน โดยคำนึงถึงเครื่องหมายและช่วงของค่าสลิป ส. การพึ่งพาแรงบิดแม่เหล็กไฟฟ้าบนสลิปนั้นแสดงเป็นภาพกราฟิกในรูปที่ 2.11 (เส้นทึบ).
คุณลักษณะประเภทนี้อธิบายได้ง่ายโดยใช้สูตร (2.24) (2.15) และ (2.16) ด้วยสลิปที่เพิ่มขึ้นกระแสของโรเตอร์ ฉัน2เพิ่มขึ้นอย่างต่อเนื่อง แต่กลายเป็นอุปนัยมากขึ้นเรื่อย ๆ - ลดลง คอส ψ 2เมื่อความถี่ของกระแสในโรเตอร์เพิ่มขึ้นและตามความต้านทานอุปนัย เป็นผลให้ส่วนประกอบที่ใช้งานของกระแสโรเตอร์และดังนั้นแรงบิดแม่เหล็กไฟฟ้าจะเพิ่มขึ้นก่อนแล้วจึงเริ่มลดลง
สลิปที่โมเมนต์ถึงค่าสูงสุด M max เรียกว่าวิกฤต และแสดงโดย scr ในการกำหนด scr จำเป็นต้องใช้นิพจน์ (2.22) เพื่อหาอนุพันธ์ dM em /dsและเท่ากับศูนย์ คำตอบของสมการที่ได้คือ
s cr \u003d ±C R 2 " / √ (R 1 " + 2) (2.25)
ในการประมาณค่าแรก C 1 ≈ 1 และ R 1 ≈ 0 เราจะได้
s cr = ±R 2 " /(x 1+x2") (2.26)
มอเตอร์เหนี่ยวนำส่วนใหญ่ต้องการประสิทธิภาพสูง ดังนั้นความต้านทานเชิงแอคทีฟของขดลวดโดยเฉพาะ R 2 ซึ่งกำหนดระดับการสูญเสียทางไฟฟ้าในโรเตอร์มักจะมีขนาดเล็ก ในกรณีนี้ สลิปวิกฤตจะอยู่ในช่วง
เราแทนที่ (2.25) เป็น (2.22) และรับนิพจน์สำหรับช่วงเวลาสูงสุด:
M สูงสุด = ± m 1 U 1 2 /2 ω 1 C [± R 1 + √(R 1 2 +(x 1 + Cx 2) 2)] (2.27)
เครื่องหมาย "+" หมายถึงโหมดมอเตอร์ "-" - ไปยังโหมดเครื่องกำเนิดไฟฟ้า
อย่างที่คุณเห็น โมเมนต์สูงสุดเป็นสัดส่วนกับกำลังสอง แรงดันไฟไม่ขึ้นกับความต้านทานแอคทีฟของวงจรโรเตอร์ R2และเกิดขึ้นกับสลิปที่มากขึ้นความต้านทานของวงจรโรเตอร์ก็จะยิ่งมากขึ้น (รูปที่ 2.11 เส้นประ R2B >R2A).
แรงบิดเริ่มต้นเครื่องยนต์ เอ็มพีถูกกำหนดโดยนิพจน์ (2.22) สำหรับ s=1. ความหมาย เอ็มพีสัดส่วนกับกำลังสองของแรงดันไฟจ่ายและเพิ่มขึ้นตามการเพิ่มขึ้น R2(ดูรูปที่ 2.11) ถึงสูงสุดที่ s cr =1.
จัดอันดับสลิป snom ซึ่งสอดคล้องกับแรงบิดสูงสุด Mnom เพิ่มขึ้นตาม R 2 ที่เพิ่มขึ้น สิ่งนี้มาพร้อมกับการสูญเสียทางไฟฟ้าที่เพิ่มขึ้นในวงจรโรเตอร์และประสิทธิภาพที่ลดลง สำหรับมอเตอร์แบบอะซิงโครนัสที่มีสลิปวิกฤตต่ำ S nom = 0.02 - 0.06
สมการสมดุลของโมเมนต์บนเพลามอเตอร์
โมเมนต์แม่เหล็กไฟฟ้าที่พัฒนาโดยเครื่องยนต์จะเอาชนะโมเมนต์โหลด M n ที่ใช้กับเพลาเครื่องยนต์และโมเมนต์ความต้านทานของเครื่องยนต์ M 0 (แรงบิดรอบเดินเบา) ซึ่งกำหนดโดยการสูญเสียทางกลและการสูญเสียเพิ่มเติมในเครื่องยนต์ โมเมนต์ที่เป็นผลลัพธ์จะกำหนดค่าและเครื่องหมายของการเร่งความเร็วของโรเตอร์:
dω / dt \u003d (M em - M 0 - M n) / J (2.28)
ที่ไหน เจ- โมเมนต์ความเฉื่อยของชิ้นส่วนที่หมุนได้ - โรเตอร์และโหลด
นี่คือสมการเชิงอนุพันธ์ของการเคลื่อนที่ของไดรฟ์ไฟฟ้า ซึ่งประกอบด้วยมอเตอร์และโหลด ซึ่งแปลงเป็นรูปแบบ
M em \u003d M 0 + M n + J (dω / dt) (2.29)
เรียกว่า สมการสมดุลโมเมนต์บนเพลามอเตอร์.
ในสมการนี้:
M 0 + M n \u003d M st- โมเมนต์ความต้านทานคงที่
J(dω/dt)= M dynคือโมเมนต์การต่อต้านแบบไดนามิก
โมเมนต์แม่เหล็กไฟฟ้า ม เอ่อลบโมเมนต์ M0เรียกว่ามีประโยชน์หรือแรงบิดบนเพลาและแสดงว่า M2. จากสมการ (2.28) และ (2.29) จะได้ว่า
1) ถ้า ม เอ่อ = M st, แล้ว dω/dt = 0, ω
= const เช่น เครื่องยนต์ทำงานในโหมดคงที่ (คงที่) ในขณะที่ M2 = ม น;
2) ถ้า ม เอ่อ> M stจากนั้นความเร็วเชิงมุมของโรเตอร์จะเพิ่มขึ้นเช่น เครื่องยนต์ทำงานในโหมดชั่วคราว (ไดนามิก)
3) ถ้า ม เอ่อ< M stจากนั้นความเร็วเชิงมุมของโรเตอร์จะลดลงเช่น เครื่องยนต์กำลังทำงานในโหมดชั่วคราว
ที่ กรณีทั่วไปเมื่อรวบรวมสมการสมดุลของโมเมนต์ เราควรคำนึงถึงสัญญาณของโมเมนต์ ซึ่งกำหนดโดยทิศทางของการกระทำของโมเมนต์ที่สัมพันธ์กับทิศทางการหมุนเชิงบวก หากมอเตอร์สร้างแรงบิดแม่เหล็กไฟฟ้าที่กระทำในทิศทางบวก แรงบิดนั้นถือเป็นค่าบวก ( ม เอ่อ> 0). หากมอเตอร์เข้าสู่โหมดเบรก แรงบิดของมอเตอร์จะเริ่มทำงานในทิศทางตรงกันข้าม ( ม เอ่อ< 0).
โมเมนต์ความต้านทานคงที่ที่สร้างขึ้นโดยกลไกการทำงานและอุปกรณ์ส่งสัญญาณมีสองประเภท: ปฏิกิริยาและแอคทีฟ โมเมนต์ปฏิกิริยาของความต้านทานมักจะมุ่งตรงไปในทิศทางของการหมุนเสมอ กล่าวคือ เป็นตัวยับยั้ง ( M st< 0). К реактивным
моментам относятся моменты сил трения, в том числе в самом двигателе, моменты
сопротивления при резании металла на обрабатывающих станках и т.д. Активный момент
всегда действует в одном и том же направлении, независимо от направления вращения,
т.е. может либо препятствовать движению (M st> 0) หรือมีส่วนร่วม ( M st< 0). К активным
моментам относятся моменты сил тяжести, сил упругости пружин и т.д.
ลักษณะทางกล
สมการของคุณสมบัติทางกลตามธรรมชาติของมอเตอร์เหนี่ยวนำคือนิพจน์ (2.21) หรือ (2.22) โดยที่สลิป S ถูกแทนที่ด้วยความเร็วเชิงมุม ω 2ตาม (2.8) สำหรับ U 1 = const. กราฟลักษณะแสดงในรูปที่ 2.12, ก.

รูปที่ 2.12
ให้เราประเมินคุณสมบัติทางกลในแง่ของความเสถียร ความแข็งแกร่ง และความเป็นเส้นตรง
ถือว่ามอเตอร์ในไดรฟ์แบบเปิดทำงานได้อย่างเสถียร หากหลังจากขจัดสิ่งรบกวนแล้ว มอเตอร์จะกลับสู่จุดเริ่มต้นการทำงานโดยอัตโนมัติตามคุณลักษณะทางกล ลักษณะทางกลมอเตอร์ขึ้นอยู่กับความเร็วเชิงมุมของโรเตอร์กับแรงบิดแม่เหล็กไฟฟ้า: ω 2 \u003d ฉ (เอ็ม em). ลักษณะทางกลของโหลดขึ้นอยู่กับโมเมนต์ความต้านทานบนเพลามอเตอร์บนความเร็วเชิงมุม: M st \u003d f (ω 2).
ในทางทฤษฎี การทำงานในสภาวะคงตัวของเครื่องยนต์สามารถทำได้ที่จุด A 1และ A 2, ที่ไหน ม เอ่อ=M st.A. ปล่อยให้เครื่องยนต์ทำงานไปด้วยภาระ M st.A \u003d constณ จุดนั้น A 1และเกิดความปั่นป่วนขึ้นทำให้ความเร็วเชิงมุมเพิ่มขึ้น?? มอเตอร์จะสร้างแรงบิดที่สอดคล้องกับจุด A 1" และภาระคือโมเมนต์ความต้านทานที่สอดคล้องกับจุด A 1. โดยที่ ม เอ่อ<M stตามสมการสมดุลโมเมนต์ ความเร็วเชิงมุม ω 2ลดลงและเครื่องยนต์กลับสู่จุด A 1. กลับไปที่จุด A 1จะเกิดขึ้นด้วยการเพิ่มความเร็วเป็นลบ (point A 1"") หากเครื่องยนต์ทำงานพร้อมโหลดที่จุด A 2แล้วด้วยสิ่งรบกวนที่นำไปสู่ความเร็วที่เพิ่มขึ้น เครื่องยนต์จะสร้างแรงบิดที่สอดคล้องกับจุด A 2" และภาระคือโมเมนต์ความต้านทานที่สอดคล้องกับจุด A 2. โดยที่ ม เอ่อ>M stและความเร็วเชิงมุมยังคงเพิ่มขึ้น เครื่องยนต์เคลื่อนออกจากจุด A 2. กลับไปที่จุด A 2ไม่เกิดขึ้นแม้จะเพิ่มความเร็วเป็นลบ (point A 2"") ในกรณีนี้ ความเร็วจะลดลงเรื่อยๆ จนกว่าเครื่องยนต์จะหยุด
ดังนั้น ณ จุดนั้น A 1เครื่องยนต์ทำงานอย่างต่อเนื่องและตรงจุด A 2- ไม่เสถียร ในกรณีทั่วไป สัญญาณอย่างเป็นทางการของการทำงานที่มั่นคงของเครื่องยนต์คือความไม่เท่าเทียมกัน
(dM เอ็ม /dω 2)< (dM ст /dω 2) (2.30)
ด้วยโมเมนต์โหลดที่ไม่ขึ้นกับความเร็ว กล่าวคือ ที่ M st \u003d ข้อเสีย t, ความไม่เท่าเทียมกันนี้อยู่ในรูปแบบ
(dω 2 /dM ยาว)< 0 (2.31)
ตามแนวคิดเรื่องความเสถียรของเครื่องยนต์ในการขับแบบเปิด เป็นเรื่องปกติที่จะเรียกคุณลักษณะทางกลของเครื่องยนต์ว่าเสถียร หากช่วยให้เครื่องยนต์ทำงานได้อย่างเสถียรที่ M st \u003d const.
หากเราใช้เกณฑ์ความมั่นคงอย่างเป็นทางการ (2.31) ก็แสดงว่าสำหรับ M st \u003d constมั่นใจได้ถึงการทำงานที่มั่นคงของเครื่องยนต์ในพื้นที่จาก .เท่านั้น ω 1ก่อน ω 2cr. พล็อตจาก ω 2crมากถึง 0 ไม่เสถียร ช่วงการทำงานของแรงบิดและความเร็วของไดรฟ์ไฟฟ้าที่มีมอเตอร์แบบอะซิงโครนัสถูกเลือกไว้ภายในส่วนที่เสถียรของลักษณะทางกลของมอเตอร์ คะแนนโหลดสูงสุด ม นอมตั้งอยู่บนพื้นที่ทำงานในลักษณะที่ความจุเกิน K m \u003d M สูงสุด / M ชื่อ \u003d 1.7 -3.5. มีความต้านทานโรเตอร์ต่ำ R2ความเร็ววิกฤต ω 2cr \u003d (0.8 - 0.9) ω 1และพื้นที่ทำงานยาก ลักษณะทางกลโดยทั่วไปไม่เป็นเชิงเส้น แต่พื้นที่ทำงานใกล้เคียงกับเส้นตรง
ภายในพื้นที่ทำงาน เครื่องยนต์จะควบคุมตัวเอง การเพิ่มขึ้นของโมเมนต์ความต้านทานบนเพลามอเตอร์จาก M st.vก่อน M st.sทำให้ความเร็วเชิงมุมของโรเตอร์ลดลงจาก ω 2vก่อน ω 2s, การเพิ่มขึ้นของ EMF และกระแสเหนี่ยวนำในโรเตอร์โดยสนามหมุน และดังนั้น การเพิ่มขึ้นของโมเมนต์แม่เหล็กไฟฟ้าเป็นค่าที่เท่ากับค่าใหม่ของโมเมนต์ความต้านทาน (การเปลี่ยนจากจุด ที่อย่างแน่นอน จากเกี่ยวกับลักษณะทางกล)
ลักษณะการทำงาน
.
ลักษณะการทำงานของมอเตอร์เหนี่ยวนำคือการขึ้นต่อกันของความเร็วเชิงมุมของโรเตอร์ ω 2, ช่วงเวลาที่มีประโยชน์ M 2, ประสิทธิภาพ η
, ตัวประกอบกำลัง cos φ 1(ฟาย 1- การเปลี่ยนเฟสระหว่าง U 1และ ฉัน 1) และกระแสสเตเตอร์ ฉัน 1จากพลังที่มีประโยชน์ P2 ที่ U 1 = คุณหนูและ f1 = f nom(รูปที่ 2.12, ข). คุณลักษณะด้านประสิทธิภาพสามารถนำมาทดลองหรือคำนวณโดยใช้วงจรสมมูล
เมื่อเปลี่ยนจาก x.x. (ไม่ได้โหลดมอเตอร์) เข้าสู่โหมดโหลดเล็กน้อย ความเร็วเชิงมุมของโรเตอร์จะลดลงเล็กน้อยเนื่องจาก ω 2 \u003d (1 - s) ω 1, แ สนมตามที่ระบุไว้คือหน่วยเปอร์เซ็นต์ ดังนั้นช่วงเวลาที่มีประโยชน์ M 2 \u003d P 2 / ω 2เพิ่มขึ้นตามกฎหมายใกล้เคียงกับเส้นตรง การเปลี่ยนแปลงของกระแสสเตเตอร์ถูกกำหนดโดยการตอบสนองของโรเตอร์ ค่ากระแสที่ค่อนข้างสูงที่ไม่ได้ใช้งานนั้นเกิดจากการมีช่องว่างอากาศ ปัจจุบัน xx ส่วนใหญ่เป็นอุปนัยและต่ำตามลำดับ cos φ 10- ประมาณ 0.1 - 0.2 เมื่อโหลดเพิ่มขึ้น พลังงานไฟฟ้าที่ใช้งานจะเพิ่มขึ้นและ cos φ 1เติบโต - ค่าสูงสุดถึง 0.7 - 0.9 ปัจจุบันยังคงเป็นลักษณะอุปนัยที่ใช้งานอยู่ ( ฟาย 1>0) และเครือข่ายอุปทานโหลดด้วยกระแสปฏิกิริยา ประสิทธิภาพของเครื่องยนต์ η \u003d R 2 / R 1, ที่ไหน R 1- พลังงานไฟฟ้าที่ใช้งานโดยมอเตอร์ ด้วยพลังสมมาตร R 1 \u003d m 1 U 1 I 1 cos φ 1, ที่ไหน U 1, ฉัน 1- แรงดันเฟสและกระแส การพึ่งพาประสิทธิภาพด้านพลังงาน P 2 \u003d P 1 -Δp e -Δp m -Δp furมีลักษณะเหมือนกับหม้อแปลงไฟฟ้าเพราะ ในเครื่องยนต์ ความสูญเสียยังแบ่งออกเป็นการสูญเสียคงที่และการสูญเสียผันแปร สำหรับเครื่องจักรขนาดเล็กและขนาดกลาง ค่าสูงสุดของประสิทธิภาพ η
= 0.7 - 0.9 ในขณะที่ค่าที่ต่ำกว่าหมายถึงมอเตอร์ที่มีกำลังต่ำซึ่งมีความต้านทานของขดลวดที่ค่อนข้างสูงกว่า





