ส่งงานที่ดีของคุณในฐานความรู้เป็นเรื่องง่าย ใช้แบบฟอร์มด้านล่าง
นักศึกษา นักศึกษาระดับบัณฑิตศึกษา นักวิทยาศาสตร์รุ่นเยาว์ที่ใช้ฐานความรู้ในการศึกษาและการทำงานจะขอบคุณอย่างยิ่ง
โฮสต์ที่ http://www.allbest.ru/
ยูเครน สถาบันการศึกษาของรัฐการขนส่งทางรถไฟ
ศูนย์ฝึกอบรมวิทยาศาสตร์และการปฏิบัติ
จากสาขาวิชา "วิศวกรรมไฟฟ้า"
"เครื่องยนต์ กระแสตรงด้วยแรงกระตุ้นคู่ขนาน
วางแผน
1. บทนำ
2. การออกแบบมอเตอร์กระแสตรง
3.สตาร์ทเครื่องยนต์
4. ข้อมูลทางเทคนิคของมอเตอร์
5. ลักษณะของมอเตอร์กระแสตรง
6. ลักษณะทางกล
7. รายการวรรณกรรมที่ใช้แล้ว
มอเตอร์กระแสตรง (DC motor) คือตัวแปลงพลังงานไฟฟ้ากระแสตรงเป็นพลังงานกล การออกแบบเครื่องยนต์แสดงในรูปที่ 1 มันมีสามส่วนหลัก: สเตเตอร์ (ตัวเหนี่ยวนำ) เกราะและตัวสะสม
ตัวเหนี่ยวนำ (1) - ส่วนคงที่ของตัวเครื่องเป็นกระบอกเหล็กหล่อกลวงที่ทำจากเหล็กไฟฟ้าซึ่ง ข้างในแกน (เสา) ยึดด้วยสลักเกลียว บนแกนมีขดลวดกระตุ้น (OB) ที่เชื่อมต่อกับแปรง ตัวเหนี่ยวนำถูกออกแบบมาเพื่อสร้างหลัก สนามแม่เหล็ก. สมอ (2) (หมุนส่วนด้านในของเครื่อง) เป็นกระบอกสูบที่ประกอบขึ้นจากแผ่นเหล็ก วางสมอที่คดเคี้ยวในร่องของเกราะ ตัวสะสม (3) ถูกตรึงบนเพลาเดียวกันกับกระดอง ซึ่งเป็นทรงกระบอกกลวงที่ประกอบด้วยแผ่นทองแดง (แผ่น) แยกจากกันและจากเพลากระดองและเชื่อมต่อด้วยไฟฟ้ากับแต่ละส่วนของขดลวดกระดอง จุดประสงค์ของตัวรวบรวมคือการแก้ไขทางกลของ EMF ไซน์แบบแปรผันให้เป็นแรงดันคงที่ในขนาดและทิศทาง ซึ่งจะถูกลบออกไปยังวงจรภายนอกโดยใช้แปรงที่อยู่ติดกับตัวสะสม คุณสมบัติของมอเตอร์กระแสตรงส่วนใหญ่จะถูกกำหนดโดยวิธีการขับเคลื่อนของขดลวดสนาม ในการนี้มอเตอร์กระแสตรงแบ่งออกเป็น 2 ประเภท ได้แก่ ปลุกเร้าอิสระ(รูปที่ 2a) และการกระตุ้นตัวเอง (รูปที่ 2 b, c, d)
การกระตุ้นที่คดเคี้ยวใน DCT ที่มีการกระตุ้นอิสระนั้นได้รับพลังงานจากแหล่งจ่ายกระแสตรงที่แยกต่างหาก (จากวงจรเรียงกระแสเซมิคอนดักเตอร์ แบตเตอรี่หรือตัวกระตุ้น - เครื่องกำเนิด DC)
ใน DCT ที่กระตุ้นตัวเอง วงจรกระดองและตัวเหนี่ยวนำเชื่อมต่อด้วยไฟฟ้า กล่าวคือ ขดลวดกระตุ้นนั้นขับเคลื่อนโดย EMF ของกระดองของเครื่อง
ขึ้นอยู่กับ วงจรไฟฟ้าการเชื่อมต่อของขดลวดกระดองและตัวเหนี่ยวนำของเครื่องที่มีการกระตุ้นตัวเองแบ่งออกเป็นสามประเภท: ขนาน, อนุกรมและกระตุ้นแบบผสม (รูปที่ 2 b, c, d) DPT เหมือนกับเครื่องจักรไฟฟ้าทั้งหมด ที่สามารถย้อนกลับได้ กล่าวคือ พวกเขาไม่มีความสร้างสรรค์ที่สำคัญ
การเปลี่ยนแปลงสามารถทำงานได้ทั้งในโหมดของเครื่องกำเนิดไฟฟ้าและในโหมดของเครื่องยนต์ โหมดการทำงาน DPT พร้อมการกระตุ้นแบบขนาน พิจารณาการทำงานของ DPT ด้วยการกระตุ้นแบบขนาน (รูปที่ 2b) เมื่อมอเตอร์เชื่อมต่อกับเครือข่าย DC กระแสจะเกิดขึ้นในขดลวดทั้งสอง ในกรณีนี้ ในขดลวดกระตุ้น IB กระแสกระตุ้นจะสร้างสนามแม่เหล็กของตัวเหนี่ยวนำ
ปฏิสัมพันธ์ของกระแสกระดองกับสนามแม่เหล็กของตัวเหนี่ยวนำทำให้เกิดโมเมนต์แม่เหล็กไฟฟ้าของ ME
ฉัน = sFIYA, (1)
โดยที่ c คือสัมประสิทธิ์คงที่
IЯ - กระแสเกราะ;
Ф - ฟลักซ์แม่เหล็ก
โมเมนต์แม่เหล็กไฟฟ้าของ ME แตกต่างจากโมเมนต์ของ MW บนเพลามอเตอร์ด้วยค่าโมเมนต์ของการสูญเสียรอบเดินเบา MHH ซึ่งเนื่องจากความเล็กสามารถละเลยและสันนิษฐานได้ว่า
back-EMF E ถูกเหนี่ยวนำในตัวนำของกระดองหมุน:
โดยที่ n คือความเร็วในการหมุนของกระดอง
k เป็นปัจจัยคงที่
สมการสมดุลไฟฟ้าของเครื่องยนต์มีรูปแบบดังนี้
U \u003d E + IЯ RY \u003d knФ + IЯ RY, (3)
โดยที่ U คือแรงดันไฟหลัก
สตาร์ทเครื่องยนต์
เมื่อสตาร์ทเครื่องยนต์ กระดองจะหยุดนิ่งในช่วงแรก (n = 0) และให้ (2) EMF ของกระดอง E = knF = 0 ในกรณีนี้ตาม (3) กระแสเริ่มต้นของกระดอง IYaP นั้นใหญ่จนยอมรับไม่ได้เพราะ R มีขนาดเล็กและถูกกำหนดเป็น:
ดังนั้น เพื่อจำกัดกระแสเริ่มต้น ความต้านทานของรีโอสแตทสตาร์ท RP จึงถูกนำเข้าสู่วงจรอาร์เมเจอร์แบบอนุกรม ซึ่งได้รับการแนะนำอย่างเต็มที่ก่อนสตาร์ทเครื่องยนต์และส่งออกไปหลังจากที่เครื่องยนต์เร่งความเร็วเมื่อ EMF ด้านหลัง (E) เพิ่มขึ้น
การสตาร์ทเครื่องยนต์ดังกล่าวช่วยป้องกันขดลวดกระดองจากกระแสเริ่มต้นที่สูง INP และช่วยให้คุณได้รับฟลักซ์แม่เหล็กสูงสุดในโหมดนี้
หากสตาร์ทเครื่องยนต์ขณะเดินเบา ก็ไม่จำเป็นต้องพัฒนาแรงบิดสูงสุด MB บนเพลา ดังนั้นเครื่องยนต์สามารถสตาร์ทได้โดยการเพิ่มแรงดันไฟฟ้า U อย่างราบรื่น
ถอยหลังเครื่องยนต์.
การเปลี่ยนทิศทางการหมุนของมอเตอร์สามารถทำได้โดยการเปลี่ยนกระแสทั้งในขดลวดกระดองหรือในขดลวดสนามเพราะ สิ่งนี้จะเปลี่ยนสัญญาณของแรงบิด การเปลี่ยนแปลงทิศทางของกระแสในขดลวดทั้งสองพร้อมกันไม่เปลี่ยนทิศทางการหมุนของมอเตอร์ ควรเปลี่ยนปลายขดลวดหลังจากที่เครื่องยนต์ดับสนิทเท่านั้น
ระเบียบข้อบังคับความเร็วการหมุน.
จากนิพจน์ (3) เป็นไปได้ที่จะกำหนดความเร็วในการหมุนของเครื่องยนต์:
ขดลวดจ่ายกระแสตรงของมอเตอร์
จากสูตร (6) จะเห็นได้ว่าสามารถควบคุมความเร็วในการหมุนของมอเตอร์กระแสตรงได้โดยการเปลี่ยนแรงดันไฟหลัก ฟลักซ์แม่เหล็กกระตุ้น และความต้านทานของวงจรกระดอง วิธีที่ใช้กันมากที่สุดในการควบคุมความเร็วของการหมุนของมอเตอร์คือการเปลี่ยนฟลักซ์แม่เหล็กโดยใช้รีโอสแตตแบบปรับค่าในวงจรกระตุ้น
การลดกระแสกระตุ้นจะทำให้ฟลักซ์แม่เหล็กอ่อนลงและเพิ่มความเร็วในการหมุนของมอเตอร์ วิธีนี้ประหยัดเพราะ กระแสกระตุ้น (ในมอเตอร์กระตุ้นแบบขนาน) คือ 3-5% ของกระดอง IN และการสูญเสียความร้อนในลิโน่ควบคุมนั้นเล็กมาก คุณสมบัติหลักของ DC Motor พร้อม Parallel Excitation
การทำงานของมอเตอร์กระแสตรงที่มีการกระตุ้นแบบขนานนั้นประเมินโดยคุณสมบัติหลักดังต่อไปนี้:
ลักษณะการเดินเบา: (รูปที่ 3)
n0 = ѓ (IB) โดยที่ U = UN = const และ IЯ = I0,
โดยที่ n0 คือความเร็วรอบเดินเบา (ไม่โหลด)
I0 - ไม่มีกระแสโหลด 5 - 10% IH;
สหประชาชาติ - ค่าเล็กน้อยแรงดันไฟหลัก
โดยพิจารณาว่าเมื่อไม่ได้ใช้งานผลิตภัณฑ์ IЯRЯ มีขนาดเล็กเมื่อเทียบกับ U จากนั้นจาก (6) ความเร็วของเครื่องยนต์จะถูกกำหนดโดยความสัมพันธ์ผกผันกับฟลักซ์แม่เหล็ก Ф:
ด้วยการเพิ่มขึ้นของกระแสในขดลวดกระตุ้น ฟลักซ์แม่เหล็กจะเปลี่ยนไปตามเส้นโค้งการทำให้เป็นแม่เหล็ก Ф = ѓ (IВ) ดังนั้นความสัมพันธ์ระหว่างความเร็วในการหมุนของมอเตอร์ n และกระแสกระตุ้น IВ นั้นเกือบจะเกินความจริง ที่ค่าต่ำของกระแสกระตุ้น การปฏิวัติเปลี่ยนแปลงเกือบผกผัน ที่กระแสกระตุ้นสูง
ความอิ่มตัวของแม่เหล็กของเสาเหล็กมีผล และส่วนโค้งจะราบเรียบและวิ่งเกือบขนานกับแกน abscissa การเปลี่ยนแปลงที่คมชัด - การลดลงของกระแสกระตุ้นรวมถึงการหยุดชะงักของวงจรกระตุ้นโดยไม่ได้ตั้งใจตาม (9) อาจทำให้มอเตอร์ "ทำงาน" (เมื่อ IВ > 0 ดังนั้น Ф ก็มีแนวโน้มที่จะ 0, n > ?)
ลักษณะทางกล นี่คือการพึ่งพาความเร็วการหมุนของโรเตอร์กับแรงบิด MV บนเพลามอเตอร์ที่แรงดันไฟหลักคงที่และกระแสกระตุ้น:
n \u003d ѓ (MV) กับ U \u003d UH \u003d const, IВ \u003d const
สำหรับมอเตอร์กระตุ้นแบบขนาน โมเมนต์ MV เป็นสัดส่วนกับระดับแรกของกระแสเกราะ IЯ ดังนั้นลักษณะทางกลสามารถแสดงได้ด้วยการพึ่งพา n (Ib) ซึ่งเรียกว่าระบบเครื่องกลไฟฟ้าหรือความเร็ว (รูปที่ 4)
โหลด (แรงบิดเบรก) ใช้กับเพลามอเตอร์ ตาม (6) ที่ค่าคงที่ของกระแสกระตุ้นการลดลงของความเร็วการหมุน n เป็นผลมาจากแรงดันไฟฟ้าตกในวงจรกระดอง - IЯ·RЯ และปฏิกิริยาของกระดอง เมื่อโหลดเพิ่มขึ้น ความเร็วในการหมุนจะลดลงเล็กน้อยตามลำดับ 3-8% ลักษณะความเร็วนี้เรียกว่าเข้มงวด ลักษณะการควบคุม (รูปที่ 5) นี่คือการพึ่งพา IB กระแสกระตุ้นบน IA ปัจจุบันของกระดองที่ แรงดันคงที่เครือข่าย U และความเร็วในการหมุนคงที่ n:
IВ \u003d ѓ (IЯ) ที่ U \u003d UN, n \u003d const.
จากการวิเคราะห์ลักษณะภายนอก จะเห็นได้ว่าความเร็วในการหมุนลดลงตามภาระที่เพิ่มขึ้น
ลักษณะการควบคุมทำให้สามารถตัดสินได้ว่าจำเป็นต้องควบคุมกระแสในขดลวดกระตุ้นอย่างไรภายในขอบเขตใด เพื่อรักษาความเร็วในการหมุนให้คงที่
เทคนิคการทดลอง
ดำเนินการศึกษาโหมดการทำงานของ DPT ที่มีการกระตุ้นแบบขนาน
คอมเพล็กซ์การศึกษาโมดูลาร์ MUK-EP1 ซึ่งประกอบด้วย:
แหล่งจ่ายไฟ DC มอเตอร์ BPP1;
หน่วยจ่ายไฟสำหรับมอเตอร์แบบอะซิงโครนัส BPA1
ตัวเครื่องไฟฟ้า MA1-AP.
PL073U3 (220V, 180 วัตต์,
1500 รอบต่อนาที) การสลับขดลวดมอเตอร์อัตโนมัติและการเชื่อมต่อการวัด
อุปกรณ์ดำเนินการในบล็อก BPP1
ใช้เป็นภาระ มอเตอร์แบบอะซิงโครนัส(BP) ในโหมด เบรกแบบไดนามิก. การสลับอัตโนมัติของขดลวด BP และการเชื่อมต่อ เครื่องมือวัดจะดำเนินการในบล็อก BPA1
รูปแบบการทำงานของคอมเพล็กซ์หลังจากสลับบล็อกแสดงในรูปที่ 6
บรรณานุกรม
1. Katsman MM รถยนต์ไฟฟ้า. - ม.: สูงกว่า. โรงเรียน พ.ศ. 2536
2. Kopylov I.P. รถยนต์ไฟฟ้า. - ม.: Energoatomizdat, 1986
โฮสต์บน Allbest.ru
...เอกสารที่คล้ายกัน
หลักการทำงานและอุปกรณ์ของเครื่องกำเนิดไฟฟ้ากระแสตรง แรงเคลื่อนไฟฟ้าและแรงบิดแม่เหล็กไฟฟ้าของเครื่องกำเนิดไฟฟ้ากระแสตรง วิธีการกระตุ้นเครื่องกำเนิดไฟฟ้ากระแสตรง คุณสมบัติและลักษณะของเครื่องยนต์ ประเภทต่างๆเร้าอารมณ์
บทคัดย่อ เพิ่มเมื่อ 11/12/2552
การควบคุมความเร็วของมอเตอร์กระแสตรงโดยการเปลี่ยนฟลักซ์กระตุ้น การป้องกันกระแสไฟสูงสุดของไดรฟ์ไฟฟ้า ลักษณะความเร็วของเครื่องยนต์ แบบแผนของวงจรไฟฟ้าของมอเตอร์กระแสตรงและมอเตอร์แบบอะซิงโครนัส
ภาคเรียนที่เพิ่ม 03/30/2014
หลักการทำงานของเครื่องกำเนิดไฟฟ้ากระแสตรง ขดลวดสมอและกระบวนการกระตุ้นของเครื่อง DC คดเคี้ยวด้วยส่วน "ตาย" ตัวอย่างการวนรอบอย่างง่ายและการม้วนตัวของคลื่น มอเตอร์กระแสตรงพร้อม การกระตุ้นตามลำดับ.
การนำเสนอ, เพิ่ม 11/09/2013
การออกแบบและหลักการทำงาน เครื่องจักรไฟฟ้ากระแสตรง. ศึกษาลักษณะโหลด ลักษณะภายนอก และการควบคุม และคุณสมบัติการทำงานของเครื่องกำเนิดไฟฟ้าที่มีการกระตุ้นอิสระ คุณสมบัติของการสตาร์ทเครื่องยนต์ด้วยระบบกระตุ้นแบบขนาน
งานห้องปฏิบัติการ เพิ่ม 02/09/2014
ศึกษาลักษณะทางกลของมอเตอร์กระแสตรงที่มีการกระตุ้นแบบขนาน อิสระ และแบบอนุกรม โหมดเบรก มอเตอร์ไฟฟ้า กระแสสลับด้วยเฟสโรเตอร์ ศึกษาวงจรสตาร์ทมอเตอร์ ฟังก์ชันเวลา
งานห้องปฏิบัติการเพิ่ม 10/23/2009
หลักการทำงานและอุปกรณ์ของเครื่องกำเนิดไฟฟ้ากระแสตรง ประเภทของขดลวดกระดอง วิธีการกระตุ้นเครื่องกำเนิดไฟฟ้ากระแสตรง การย้อนกลับของเครื่อง DC มอเตอร์ของการกระตุ้นแบบขนาน อิสระ อนุกรม และแบบผสม
บทคัดย่อ เพิ่มเมื่อ 12/17/2009
การออกแบบมอเตอร์กระแสตรง แก่นของข้อดีหลัก ประเภทและระดับเสียงของขดลวดกระดอง จำนวนรอบที่คดเคี้ยว, แผ่นสะสม, สล็อต ลักษณะการสะกดจิตของมอเตอร์ มวลของขดลวดกระดองและตัวบ่งชี้ไดนามิกหลัก
ภาคเรียนที่เพิ่ม 05/21/2012
การจ่ายไฟของมอเตอร์ระหว่างการควบคุมความเร็วโดยการเปลี่ยนค่าแรงดันไฟจากแหล่งจ่ายไฟ DC ที่แยกออกมาต่างหาก การประยุกต์ใช้ตัวแปลงไทริสเตอร์ในไดรฟ์ไฟฟ้ากระแสตรง แบบแผนโครงสร้างตัวแปลงไทริสเตอร์
ภาคเรียนที่เพิ่ม 02/01/2015
การสร้างแบบจำลองการเริ่มต้นของมอเตอร์กระแสตรง DP-62 สำหรับไดรฟ์ของรถเข็นโลหะโดยใช้แพ็คเกจ SciLab บล็อกไดอะแกรมของโมเดล องค์ประกอบของมัน ข้อมูลหนังสือเดินทางของเครื่องยนต์ DP-62 ประเภทของการกระตุ้น ไดอะแกรมชั่วคราวการพล็อต
งานห้องปฏิบัติการเพิ่ม 06/18/2015
คุณสมบัติของการคำนวณมอเตอร์กระแสตรงจากตำแหน่งของวัตถุควบคุม การคำนวณตัวแปลงไทริสเตอร์ เซ็นเซอร์ไดรฟ์ไฟฟ้า และเซ็นเซอร์กระแส แบบแผนของมอเตอร์กระแสตรงที่มีการกระตุ้นอิสระ การสร้างแบบจำลองรูปร่างภายนอก
บทที่ 29
แนวคิดพื้นฐาน
เอ็ม, หมุน
antielectromotive
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
แต่ตาม (25.24)
![]()
![]() , (29.4)
, (29.4)
![]() .
.
เอ็ม, .
เช่น. ยูหรือการไหลลดลง F ;
ยู, F
F
สตาร์ทเครื่องยนต์
ยู .
รีโอสแตทเริ่มต้น
R โอ 1
![]() .
.
ในเวลาเดียวกันผ่านคันโยก Rและยาง W อาร์
,
เอ็มสัดส่วนโดยตรงกับการไหล F F
บทที่ 29
แนวคิดพื้นฐาน
เครื่องสะสมมีคุณสมบัติในการย้อนกลับ กล่าวคือ สามารถทำงานได้ทั้งในโหมดเครื่องกำเนิดไฟฟ้าและในโหมดเครื่องยนต์ ดังนั้นหากเครื่อง DC เชื่อมต่อกับแหล่งจ่ายไฟ DC กระแสจะปรากฏในขดลวดกระตุ้นและในขดลวดกระดองของเครื่อง ปฏิสัมพันธ์ของกระแสกระดองกับสนามกระตุ้นสร้างโมเมนต์แม่เหล็กไฟฟ้าบนกระดอง เอ็ม,ซึ่งไม่เบรกเหมือนในเครื่องปั่นไฟ แต่ หมุน
ภายใต้อิทธิพล โมเมนต์แม่เหล็กไฟฟ้าเกราะเครื่องจะเริ่มหมุน กล่าวคือ เครื่องจะทำงานในโหมดเครื่องยนต์ ใช้พลังงานไฟฟ้าจากเครือข่ายและแปลงเป็นพลังงานกล ในระหว่างการทำงานของเครื่องยนต์ กระดองจะหมุนในสนามแม่เหล็ก มีการเหนี่ยวนำ EMF ในขดลวดเกราะซึ่งสามารถกำหนดทิศทางได้โดยกฎ "มือขวา" โดยธรรมชาติแล้ว มันไม่ต่างจาก EMF ที่เหนี่ยวนำในขดลวดกระดองของเครื่องกำเนิดไฟฟ้า ในมอเตอร์ EMF ถูกควบคุมโดยกระแส ดังนั้นจึงเรียกว่า antielectromotiveแรง (back-EMF) ของเกราะ (รูปที่ 29.1)
สำหรับเครื่องยนต์ที่วิ่งด้วยความเร็วคงที่
![]() .
(29.1)
.
(29.1)
จาก (29.1) ตามมาว่าแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์นั้นสมดุลโดย EMF ด้านหลังของขดลวดกระดองและแรงดันตกในวงจรกระดอง ขึ้นอยู่กับ (29.1) กระดองปัจจุบัน
คูณสมการทั้งสองข้าง (29.1) ด้วยกระแสเกราะ เราจะได้ สมการกำลังสำหรับวงจรกระดอง:
![]() , (29.3)
, (29.3)
พลังงานในวงจรขดลวดกระดองอยู่ที่ไหน - พลังของการสูญเสียไฟฟ้าในวงจรกระดอง
เพื่อชี้แจงสาระสำคัญของนิพจน์ เราจะทำการเปลี่ยนแปลงต่อไปนี้:
![]() ,
,
![]() .
.
แต่ตาม (25.24)
![]()
![]() , (29.4)
, (29.4)
ความถี่เชิงมุมของการหมุนของกระดองอยู่ที่ไหน - กำลังแม่เหล็กไฟฟ้าของเครื่องยนต์
ดังนั้น นิพจน์คือ พลังงานแม่เหล็กไฟฟ้าของมอเตอร์
การแปลงนิพจน์ (29.3) โดยคำนึงถึง (29.4) เราได้รับ
![]() .
.
การวิเคราะห์สมการนี้แสดงให้เห็นว่าเมื่อโหลดบนเพลามอเตอร์เพิ่มขึ้น กล่าวคือ เมื่อแรงบิดแม่เหล็กไฟฟ้าเพิ่มขึ้น เอ็ม,เพิ่มกำลังในวงจรขดลวดกระดองเช่นกำลังที่อินพุตของมอเตอร์ แต่เนื่องจากแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์ยังคงไม่เปลี่ยนแปลง การเพิ่มขึ้นของภาระมอเตอร์จึงมาพร้อมกับกระแสที่เพิ่มขึ้นในขดลวดกระดอง .
ขึ้นอยู่กับวิธีการกระตุ้น มอเตอร์กระแสตรง เช่นเดียวกับเครื่องกำเนิดไฟฟ้า แบ่งออกเป็นมอเตอร์ที่มีการกระตุ้นจากแม่เหล็กถาวร (แม่เหล็ก) และด้วยการกระตุ้นด้วยแม่เหล็กไฟฟ้า หลังตามรูปแบบการเปิดขดลวดกระตุ้นที่สัมพันธ์กับขดลวดกระดองแบ่งออกเป็นมอเตอร์กระตุ้นแบบขนาน (ปัด) ซีรีย์ (อนุกรม) และผสม (ผสม)
ตามสูตร EMF ความเร็วมอเตอร์ (rpm)
แทนค่าจาก (29.1) เราจะได้ (rpm)
เช่น. ความเร็วของมอเตอร์แปรผันโดยตรงกับแรงดันและแปรผกผันกับฟลักซ์การกระตุ้นทางกายภาพนี้อธิบายได้จากความจริงที่ว่าการเพิ่มขึ้นของแรงดันไฟฟ้า ยูหรือการไหลลดลง Fทำให้เกิดความแตกต่างเพิ่มขึ้น ; สิ่งนี้นำไปสู่การเพิ่มขึ้นของกระแส [ดูรูปที่. (29.2)]. ด้วยเหตุนี้ กระแสไฟที่เพิ่มขึ้นจะเพิ่มแรงบิด และหากแรงบิดในการโหลดยังคงไม่เปลี่ยนแปลง ความเร็วของมอเตอร์จะเพิ่มขึ้น
จาก (29.5) ตามมาว่าสามารถควบคุมความเร็วของเครื่องยนต์ได้โดยการเปลี่ยนแรงดันไฟฟ้า ยู,ที่จ่ายให้กับมอเตอร์หรือฟลักซ์แม่เหล็กหลัก Fหรือความต้านทานไฟฟ้าในวงจรกระดอง
ทิศทางการหมุนของกระดองขึ้นอยู่กับทิศทางของฟลักซ์แม่เหล็กของการกระตุ้น Fและกระแสในขดลวดกระดอง ดังนั้นโดยการเปลี่ยนทิศทางของปริมาณเหล่านี้คุณสามารถเปลี่ยนทิศทางการหมุนของเกราะได้ โปรดทราบว่าการเปลี่ยนขั้วทั่วไปของวงจรที่สวิตช์มีดจะไม่เปลี่ยนทิศทางการหมุนของกระดองเนื่องจากสิ่งนี้จะเปลี่ยนทิศทางของกระแสทั้งในขดลวดกระดองและขดลวดกระตุ้นพร้อมกัน
สตาร์ทเครื่องยนต์
กระแสเกราะของมอเตอร์ถูกกำหนดโดยสูตร (29.2) ถ้ายอมรับ ยูและไม่เปลี่ยนแปลง ดังนั้นกระแสจะขึ้นอยู่กับหลัง EMF . กระแสถึงค่าสูงสุดเมื่อสตาร์ทเครื่องยนต์ ในช่วงเวลาเริ่มต้นของการสตาร์ท กระดองของมอเตอร์จะหยุดนิ่งและไม่มี EMF เกิดขึ้นในขดลวด ดังนั้น เมื่อมอเตอร์เชื่อมต่อโดยตรงกับเครือข่าย กระแสไหลเข้าจะเกิดขึ้นในขดลวดของกระดอง
โดยปกติความต้านทานจะน้อย ดังนั้นค่าของกระแสเริ่มต้นถึงค่าขนาดใหญ่ที่ยอมรับไม่ได้ สูงกว่า 10-20 เท่า จัดอันดับปัจจุบันเครื่องยนต์.
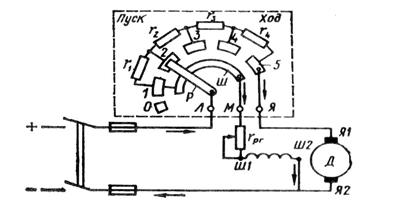
กระแสไฟเริ่มต้นขนาดใหญ่ดังกล่าวเป็นอันตรายต่อมอเตอร์มาก ประการแรก มันสามารถทำให้เกิดไฟไหม้ได้รอบด้านในเครื่อง และประการที่สอง ด้วยกระแสดังกล่าว แรงบิดเริ่มต้นที่ใหญ่เกินไปพัฒนาในมอเตอร์ ซึ่งมีผลกระทบต่อชิ้นส่วนที่หมุนของมอเตอร์ และสามารถทำลายพวกเขาด้วยกลไก และสุดท้าย กระแสนี้ทำให้แรงดันไฟฟ้าในเครือข่ายลดลงอย่างรวดเร็ว ซึ่งส่งผลเสียต่อการทำงานของผู้บริโภครายอื่นที่รวมอยู่ในเครือข่ายนี้ ดังนั้นการสตาร์ทเครื่องยนต์โดยการเชื่อมต่อโดยตรงกับเครือข่าย (การสตาร์ทแบบไม่รีโอสแตติก) จึงมักใช้สำหรับเครื่องยนต์ที่มีกำลังไม่เกิน 0.7-1.0 กิโลวัตต์ ในมอเตอร์เหล่านี้ เนื่องจากความต้านทานที่เพิ่มขึ้นของขดลวดกระดองและมวลการหมุนขนาดเล็ก กระแสเริ่มต้นจะสูงกว่ากระแสไฟที่กำหนดเพียง 3-5 เท่า ซึ่งไม่เป็นอันตรายต่อมอเตอร์ สำหรับมอเตอร์ที่มีกำลังมากกว่านั้น เมื่อสตาร์ทมอเตอร์ จะใช้จำกัดกระแสสตาร์ท รีโอสแตทเริ่มต้น(PR) รวมอยู่ในซีรีย์ในวงจรกระดอง (สตาร์ทแบบรีโอสแตติก)
ก่อนสตาร์ทเครื่องยนต์คุณต้องมีคันโยก Rวางรีโอสแตทไว้บนหน้าสัมผัสที่ไม่ได้ใช้งาน โอ(รูปที่ 29.2) จากนั้นเปิดสวิตช์มีด เลื่อนคันโยกไปที่หน้าสัมผัสกลางแรก 1
และวงจรกระดองมอเตอร์เชื่อมต่อกับเครือข่ายผ่านความต้านทานสูงสุดของลิโน่ ![]() .
.
ข้าว. 29.2. แบบแผนของการเปิดลิโน่เริ่มต้น
ในเวลาเดียวกันผ่านคันโยก Rและยาง Wขดลวดกระตุ้นเชื่อมต่อกับเครือข่ายซึ่งกระแสซึ่งในช่วงเริ่มต้นทั้งหมดไม่ขึ้นอยู่กับตำแหน่งของคันโยก อาร์เนื่องจากความต้านทานของบัสนั้นน้อยมากเมื่อเทียบกับความต้านทานของขดลวดกระตุ้น
กระแสอาร์เมเจอร์เริ่มต้นที่อิมพีแดนซ์ของรีโอสแตทเริ่มต้น
ด้วยการถือกำเนิดของกระแสในวงจรกระดองทำให้เกิดแรงบิดเริ่มต้นภายใต้อิทธิพลของการหมุนของกระดอง เมื่อความเร็วเพิ่มขึ้น back-emf จะเพิ่มขึ้น , ซึ่งทำให้กระแสสตาร์ทและแรงบิดสตาร์ทลดลง
เมื่อกระดองเครื่องยนต์เร่งความเร็ว ก้านปรับอุณหภูมิสตาร์ทจะเปลี่ยนไปที่ตำแหน่ง 2, 3 ฯลฯ ในตำแหน่ง 5 ของคันปรับอุณหภูมิ การสตาร์ทเครื่องยนต์จะสิ้นสุดลง ความต้านทานของลิโน่เริ่มต้นมักจะถูกเลือกเพื่อให้กระแสเริ่มต้นที่ใหญ่ที่สุดเกินกระแสที่กำหนดไม่เกิน 2-3 ครั้ง
เนื่องจากแรงบิดของมอเตอร์ เอ็มสัดส่วนโดยตรงกับการไหล F[ซม. (25.24)] จากนั้นเพื่ออำนวยความสะดวกในการสตาร์ทเครื่องยนต์ของการกระตุ้นแบบขนานและแบบผสมควรถอดความต้านทานของลิโน่ในวงจรกระตุ้นออกอย่างสมบูรณ์ กระแสกระตุ้น Fในกรณีนี้ได้รับ มูลค่าสูงสุดและมอเตอร์จะพัฒนาแรงบิดที่ต้องการด้วยกระแสกระดองที่ต่ำกว่า
ไม่แนะนำให้ใช้รีโอสแตตสตาร์ทเพื่อสตาร์ทมอเตอร์ที่มีกำลังมากกว่า เนื่องจากจะทำให้สูญเสียพลังงานอย่างมาก นอกจากนี้ ลิโน่สตาร์ทก็จะเทอะทะ ดังนั้นในเครื่องยนต์กำลังสูง การสตาร์ทเครื่องยนต์แบบไม่ใช้รีโอสแตตจึงถูกใช้โดยการลดแรงดันไฟฟ้าลง ตัวอย่างของสิ่งนี้คือการสตาร์ทมอเตอร์ฉุดของหัวรถจักรไฟฟ้าโดยเปลี่ยนจาก การเชื่อมต่อแบบอนุกรมเมื่อเริ่มต้นควบคู่ไปกับ ดำเนินการตามปกติ(ดู§ 29.6) หรือสตาร์ทเครื่องยนต์ในวงจรเครื่องกำเนิดไฟฟ้า-มอเตอร์ (ดู§ 29.4)
มอเตอร์กระตุ้นแบบขนาน
รูปแบบการเชื่อมต่อมอเตอร์กระตุ้นแบบขนานกับเครือข่ายแสดงในรูปที่ 29.3, ก.คุณลักษณะเฉพาะของมอเตอร์นี้คือกระแสในขดลวดสนาม (OB) ไม่ขึ้นอยู่กับกระแสโหลด (กระแสกระดอง) รีโอสแตทในวงจรกระตุ้นทำหน้าที่ควบคุมกระแสในขดลวดกระตุ้นและฟลักซ์แม่เหล็กของขั้วหลัก
คุณสมบัติสมรรถนะของเครื่องยนต์ถูกกำหนดโดย ลักษณะการทำงานซึ่งเข้าใจว่าเป็นการพึ่งพาความเร็วของการหมุน น, หมุนเวียน ฉัน, ช่วงเวลาที่มีประโยชน์ M2, แรงบิด เอ็มจากกำลังบนเพลามอเตอร์ R 2ที่ และ (รูปที่ 29.3, 6 ).
ในการวิเคราะห์การพึ่งพา และ ซึ่งมักจะเรียกว่าคุณลักษณะความเร็ว เราหันไปหาสูตร (29.5) ซึ่งจะเห็นได้ว่าด้วยแรงดันคงที่ ยูปัจจัยสองประการที่ส่งผลต่อความเร็ว: แรงดันตกคร่อมวงจรและฟลักซ์กระตุ้น F. ด้วยการเพิ่มภาระตัวเศษจะลดลงในขณะที่เนื่องจากปฏิกิริยาของเกราะตัวส่วนก็ลดลงเช่นกัน F. โดยทั่วไป การไหลลดลงที่เกิดจากปฏิกิริยากระดองมีขนาดเล็ก และปัจจัยแรกส่งผลต่อความเร็วมากกว่าวินาที ส่งผลให้ความเร็วของเครื่องยนต์พร้อมภาระที่เพิ่มขึ้น R 2ลดลง และกราฟจะเปลี่ยนเป็นรูปร่างล้มโดยมีส่วนนูนเล็กน้อยหันไปทางแกน x หากปฏิกิริยาของเกราะในเครื่องยนต์มาพร้อมกับการไหลที่ลดลงอย่างมีนัยสำคัญ Fจากนั้นความเร็วในการหมุนจะเพิ่มขึ้นตามภาระที่เพิ่มขึ้น ดังแสดงโดยเส้นโค้งประในรูปที่ 29.3, ข.อย่างไรก็ตามการพึ่งพาอาศัยกันดังกล่าวเป็นสิ่งที่ไม่พึงปรารถนาเนื่องจากตามกฎแล้วมันไม่เป็นไปตามเงื่อนไขสำหรับการทำงานที่มั่นคงของเครื่องยนต์: ด้วยการเพิ่มภาระในเครื่องยนต์ความเร็วในการหมุนจะเพิ่มขึ้นซึ่งนำไปสู่การเพิ่มขึ้นเพิ่มเติมใน โหลด ฯลฯ เช่น ความเร็วในการหมุน นเครื่องยนต์เพิ่มขึ้นอย่างไม่มีกำหนดและเครื่องยนต์จะ "ร้อนเกินไป" เพื่อให้ลักษณะความเร็วมีรูปร่างโค้งตกลง มอเตอร์ shunt บางตัวใช้ขดลวดกระตุ้นแบบเบา (ที่มีจำนวนรอบน้อย) ซึ่งเรียกว่า ขดลวดที่มีเสถียรภาพเมื่อเปิดขดลวดนี้โดยประสานกับขดลวดกระตุ้นคู่ขนาน MMF จะชดเชยผลกระทบจากการล้างอำนาจแม่เหล็กของปฏิกิริยากระดองเพื่อให้ฟลักซ์ Fยังคงไม่เปลี่ยนแปลงในทางปฏิบัติตลอดช่วงการโหลดทั้งหมด .. ตั้งแต่
หากเราละเลยปฏิกิริยาของสมอ (ตั้งแต่ ) เราก็ยอมรับได้ จากนั้นลักษณะทางกลของมอเตอร์กระตุ้นแบบขนานจะเป็นเส้นตรงซึ่งค่อนข้างเอียงไปที่แกน abscissa (รูปที่ 29.4 เอ). มุมเอียงของลักษณะทางกลยิ่งมาก ค่าความต้านทานที่รวมอยู่ในวงจรกระดองก็จะยิ่งมากขึ้น ลักษณะทางกลของเครื่องยนต์ในกรณีที่ไม่มีความต้านทานเพิ่มเติมในวงจรกระดองเรียกว่า เป็นธรรมชาติ(ตรง 1 ). ลักษณะทางกลของเครื่องยนต์ที่ได้จากการแนะนำความต้านทานเพิ่มเติมในวงจรกระดองเรียกว่า เทียม(โดยตรง 2 และ 3 ).
ประเภทของคุณสมบัติทางกลยังขึ้นอยู่กับค่าของฟลักซ์แม่เหล็กหลัก F. ดังนั้นเมื่อลดลง Fความเร็วในการหมุน x.x เพิ่มขึ้น และเพิ่มขึ้นพร้อมกัน กล่าวคือ ทั้งสองเงื่อนไขของสมการ (29.11) เพิ่มขึ้น สิ่งนี้นำไปสู่ความลาดเอียงของคุณสมบัติทางกลที่เพิ่มขึ้นอย่างรวดเร็วนั่นคือความแข็งแกร่งของมันลดลง (รูปที่ 29.4 ข).
เมื่อแรงดันกระดองเปลี่ยนแปลง ยูความเร็วในการหมุนเปลี่ยนแปลง แต่ยังคงไม่เปลี่ยนแปลง เป็นผลให้ความแข็งแกร่งของลักษณะทางกล (ถ้าเราละเลยอิทธิพลของปฏิกิริยากระดอง) จะไม่เปลี่ยนแปลง (รูปที่ 29.4 ใน), กล่าวคือ ลักษณะความสูงจะเปลี่ยนไปในขณะที่ยังคงขนานกัน
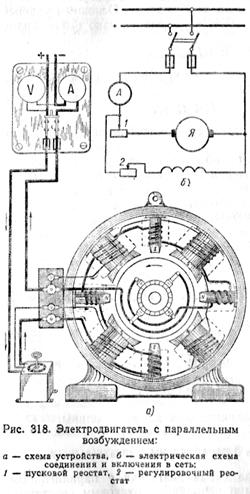
§ 138 มอเตอร์ไฟฟ้าพร้อมการกระตุ้นแบบขนาน
ในรูป 318 แสดงไดอะแกรมของมอเตอร์ที่มีการกระตุ้นแบบขนานและรีโอสแตตสตาร์ทที่รวมอยู่ในวงจรกระดอง เนื่องจากขดลวดกระตุ้นเชื่อมต่อแบบขนานกับเครือข่ายดังนั้นเมื่อ ความต้านทานคงที่วงจรกระตุ้นและแรงดันไฟหลัก ฟลักซ์แม่เหล็ก F ของมอเตอร์จะต้องคงที่
จากสูตร
จะเห็นได้ว่าค่าของตัวนับอี ดีเอส มอเตอร์จะลดลงตามกระแสกระดองที่เพิ่มขึ้น ทำให้ความเร็วของมอเตอร์ลดลงด้วย
อย่างไรก็ตามดังที่ได้กล่าวไว้ก่อนหน้านี้ขนาดของแรงดันไฟฟ้าตกในขดลวดกระดอง I a r a นั้นเล็กมากเมื่อเทียบกับแรงดันไฟฟ้า U ดังนั้นด้วยกระแสโหลดที่เพิ่มขึ้นความเร็วของเครื่องยนต์จะลดลงเล็กน้อย
ดังนั้น คุณสมบัติเฉพาะของมอเตอร์ที่มีการกระตุ้นแบบขนานคือความเร็วในการหมุนที่เกือบคงที่เมื่อโหลดบนเพลาเปลี่ยนไป โดยปกติความเร็วของเครื่องยนต์ประเภทนี้จะลดลงเพียง 3-5% เมื่อถึงโหลดเต็มที่
แรงบิดของมอเตอร์เป็นสัดส่วนกับผลคูณของกระแสกระดองและฟลักซ์แม่เหล็ก:
จากนี้จะเห็นได้ว่าแรงบิดของมอเตอร์ที่มีการกระตุ้นแบบขนานนั้นแปรผันตามกระแสของกระดอง:
ดังนั้นโดยแอมมิเตอร์ที่รวมอยู่ในวงจรกระดองเราสามารถตัดสินภาระเครื่องยนต์ได้
เครื่องยนต์จะมีความเร็วในการหมุนสูงสุดขณะเดินเบา หากความต้านทานของตัวปรับอุณหภูมิถูกขจัดออกไปโดยสิ้นเชิง การเปิดวงจรกระตุ้นจะทำให้ฟลักซ์แม่เหล็กของมอเตอร์ลดลงจนเหลือฟลักซ์แม่เหล็กตกค้างในปริมาณเล็กน้อย ตั้งแต่เคาน์เตอร์อี ดีเอส ควรจะเกือบเท่ากับแรงดันไฟหลัก จากนั้นเมื่อฟลักซ์แม่เหล็กลดลง ความเร็วในการหมุนของมอเตอร์จะเพิ่มขึ้นอย่างรวดเร็วและเป็นอันตรายต่อความแข็งแรงเชิงกลของมอเตอร์ ดังนั้นเมื่อใช้งานเครื่องยนต์จำเป็นต้องตรวจสอบสภาพที่ดีของวงจรกระตุ้น
การควบคุมความเร็วของมอเตอร์ shunt มักจะทำโดยการเปลี่ยนฟลักซ์ด้วยรีโอสแตตแบบแปรผันในวงจรภาคสนาม วิธีการควบคุมความเร็วนี้เป็นวิธีที่ประหยัดที่สุด มอเตอร์บางตัวมีการควบคุมความเร็วตั้งแต่ 1.5:1 ถึง 4:1 ตัวเลขแสดงอัตราส่วนของความเร็วสูงสุดถึงต่ำสุด ข้อจำกัดของการควบคุมส่วนใหญ่ถูกจำกัดโดยการเสื่อมสภาพของสภาวะการสลับและความแข็งแรงเชิงกลของเกราะ
การเปลี่ยนทิศทางการหมุนของมอเตอร์ด้วยการกระตุ้นแบบขนานสามารถทำได้โดยการเปลี่ยนทิศทางของกระแสในขดลวดกระตุ้นของเสาหรือโดยการเปลี่ยนทิศทางของกระแสในขดลวดกระดอง โดยปกติการเปลี่ยนแปลงของการหมุนจะดำเนินการในวิธีที่สองเนื่องจากการดำเนินการใด ๆ ที่มีขดลวดกระตุ้นเป็นอันตรายต่อเจ้าหน้าที่ปฏิบัติการและไม่พึงปรารถนาเนื่องจากลักษณะที่ปรากฏของ e ดีเอส การเหนี่ยวนำตัวเองซึ่งอาจทำให้เกิดการสลายตัวของฉนวนที่คดเคี้ยวและการเผาไหม้ของหน้าสัมผัส
มอเตอร์ที่มีการกระตุ้นแบบขนานใช้ในเครือข่าย DC เพื่อขับเคลื่อนเครื่องจักร กลไก (ถนนไฟฟ้าเหนือศีรษะ ปั๊ม พัดลม เครื่องทอผ้า โรงสีกลิ้ง รอกเหมือง) ที่ต้องการความเร็วคงที่ในการหมุนหรือการปรับความเร็วให้กว้าง
23 .Anchor ปฏิกิริยาของมัน อิทธิพลเชิงลบเกี่ยวกับการทำงานของมอเตอร์กระแสตรง วิธีชดเชยปฏิกิริยากระดอง
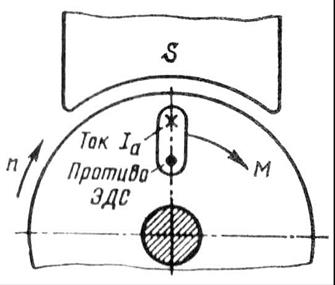
ปฏิกิริยากระดอง - ผลกระทบของสนามแม่เหล็กที่สร้างขึ้นโดยกระแสกระดองบนสนามแม่เหล็กของเสาหลักของเครื่อง ในโหมดว่างกระแสของกระดอง = 0 และสนามแม่เหล็กของเครื่องจะเกิดขึ้นจากขั้วหลักเท่านั้น (รูปที่ (a)) มีความสมมาตรเกี่ยวกับแกนของเสาหลักและเกี่ยวกับเรขาคณิตที่เป็นกลาง หากคุณปิดขดลวดกระตุ้นและเชื่อมต่อกระดองกับ แหล่งจ่ายไฟจากนั้นกระแสที่ไหลในขดลวดกระดองจะสร้างสนามแม่เหล็กดังแสดงในรูปที่ (b) Mag แกนของเสาของสนามนี้ตรงกับแกนของแปรงและตั้งฉากกับแกนของสนามของเสาหลัก การหมุนของเกราะไม่ส่งผลต่อรูปแบบของสนามเกราะเพราะ การกระจายกระแสในขดลวดกระดองยังคงที่ ในโหมดการทำงานของเครื่อง ขดลวดทั้งสองจะเปิดขึ้นและสนามแม่เหล็กจะเกิดขึ้นจากการสรุปทั้งสองฟิลด์ ส่งผลให้แกนของสนามแม่เหล็กหมุนไปในมุมบางมุม ศูนย์กลางกายภาพจะหมุนในมุมเดียวกัน ในโหมดมอเตอร์ นิวตรอนจะเลื่อนไปตามการหมุน อันเป็นผลมาจากการกระจัดส่วนหนึ่งของตัวนำของกิ่งขนานที่อยู่ระหว่างแปรงและเป็นกลางจะอยู่ใต้ขั้วของขั้วตรงข้ามและจะสร้างแรงบิดเบรกการเปลี่ยนแปลงในภาระของเครื่องจะนำไปสู่การเปลี่ยนแปลง ในกระแสเกราะและการเพิ่มขึ้นหรือลดลงในสนามแม่เหล็กที่สอดคล้องกัน ดังนั้นมุมจะเปลี่ยนไปตามภาระนอกจากการกระจัดที่เป็นกลางแล้วปฏิกิริยาของเกราะยังลดฟลักซ์แม่เหล็กโดยรวมเนื่องจากสนามใต้เสาหลักบิดเบี้ยว ภายใต้ขอบด้านหนึ่งของเสาจะอ่อนตัวลงและใต้อีกข้างหนึ่งจะเพิ่มขึ้น แต่ความแรงของสนามเนื่องจากความอิ่มตัวของขอบของขั้วนั้นน้อยกว่าการอ่อนตัวและฟลักซ์แม่เหล็กที่เกิดขึ้นจะลดลงซึ่งส่งผลเสียต่อประสิทธิภาพพลังงานของ เครื่อง การกระจัดของเป็นกลางทางกายภาพก็ส่งผลเสียต่อกระบวนการเปลี่ยนที่มีประสิทธิภาพมากที่สุด วิธีการลด อิทธิพลของปฏิกิริยาสมอคือ ขดลวดชดเชย. เข้ากับร่องพิเศษของเสาหลักและเชื่อมต่อแบบอนุกรมกับวงจรกระดอง สนามแม่เหล็กของขดลวดชดเชยอยู่ตรงข้ามและชดเชยสนามแม่เหล็กของกระดอง กระแสชดเชยที่คดเคี้ยว = กระแสอาร์เมเจอร์ ดังนั้นการชดเชยจะเกิดขึ้นในทุกโหมดตั้งแต่รอบเดินเบาจนถึงโหลดเต็ม เป็นผลให้สนามของเครื่องจักรใต้เสาหลักยังคงไม่เปลี่ยนแปลงในทางปฏิบัติ อีกวิธีหนึ่ง - เพิ่ม การกวาดล้างระหว่างขอบเสาหลักกับสมอ เพื่อรักษาการไหลด้วยช่องว่างที่เพิ่มขึ้น จำเป็นต้องเพิ่ม MMF ของขดลวดกระตุ้น
เครื่องจักรไฟฟ้ากระแสตรง
เครื่องกำเนิดไฟฟ้าที่มีการกระตุ้นแบบขนาน
สูตรการคำนวณ:
กระแสที่กำหนดโดยเครื่องกำเนิดไปยังเครือข่าย:
ศ. เครื่องกำเนิด: E \u003d U + Iya ∙Rya
กำลังส่งไปยังเครือข่าย: P2 \u003d U ∙ I \u003d I 2 ∙ R
กำลังขับมอเตอร์: P1 = P2/ η
การสูญเสียพลังงานในขดลวดกระดอง:
Rya \u003d ฉัน 2 ฉัน ∙ Rya
การสูญเสียพลังงานในสนามที่คดเคี้ยว:
Рв = U ∙Iв = I 2 в∙ Rв
การสูญเสียทั้งหมด: ΣP = P1 - ...
ร2.
ประสิทธิภาพเครื่องกำเนิดไฟฟ้า:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
มอเตอร์ที่มีการกระตุ้นแบบขนาน
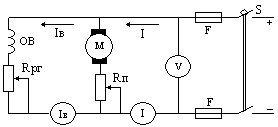
สูตรการคำนวณ:
กระแสไฟของมอเตอร์: I \u003d Ia + Iv
แรงดันเครื่องยนต์: U \u003d E + Ii ∙Rya
พลังงานที่ใช้จากเครือข่าย: Р1 = U∙I
กำลังเพลา: P 2 = P 1 ∙η
โมเมนต์บนเพลามอเตอร์:
M \u003d 9550 ∙ P 2 / n 2
ประสิทธิภาพของเครื่องยนต์:
η \u003d P 2 / P 1 \u003d (U∙I-ΣP) / U∙I
ตัวอย่างที่ 6.1เครื่องกำเนิดไฟฟ้ากระแสตรงที่มีการกระตุ้นแบบขนานจะพัฒนาแรงดันไฟฟ้าที่กำหนด Un = 220 V เครื่องกำเนิดไฟฟ้าโหลดด้วยโหลด Rn = 2.2 Ohm ความต้านทานขดลวดกระดอง Rya = 0.2 Ohm, ขดลวดกระตุ้น Rv = 220 Ohm ประสิทธิภาพเครื่องกำเนิดไฟฟ้า η = 0.87 กำหนดปริมาณต่อไปนี้:
1.โหลดปัจจุบัน; 2. กระดองปัจจุบัน; 3. กระแสกระตุ้น; 4. เครื่องกำเนิดแรงเคลื่อนไฟฟ้า;
พลังงาน 5.net; 6. การใช้พลังงาน; 7. การสูญเสียทั้งหมดในเครื่องกำเนิดไฟฟ้า 8. การสูญเสียในขดลวดกระดอง; 9. การสูญเสียในการกระตุ้นที่คดเคี้ยว
1.โหลดปัจจุบัน:
2. กระแสกระตุ้น:
![]()
3. กระแสเกราะ: Iа \u003d I - Iv \u003d 100 - 1 \u003d 99 A.
4. เครื่องกำเนิด EMF:
E \u003d U + Ii ∙ Rya \u003d 220 + 99 0.1 \u003d 229.9 V.
5.พลังงานสุทธิ:
Р2 = Un ∙ I = 220 ∙ 100 = 22000 W = 22 kW
6. การใช้พลังงาน:
7. การสูญเสียทั้งหมดในเครื่องกำเนิด:
ΣP \u003d P1 - P2 \u003d 25.87 - 22 \u003d 3.87 กิโลวัตต์
8. ความสูญเสียในขดลวดกระดอง:
Rya \u003d Iya 2 ∙Rya \u003d 99 2 ∙0.2 \u003d 1960.2 W.
9. การสูญเสียในการกระตุ้นที่คดเคี้ยว:
Pv = Un ∙ Iv = 220 ∙ 1 = 220 W.
คำตอบ: ฉัน = 100A; Iv \u003d 1 A; Ia = 99 A; อี = 229.9 โวลต์; P2 = 22 กิโลวัตต์;
P1 = 25.87 กิโลวัตต์; ΣР = 3.87 กิโลวัตต์; รยา = 1960.2 W; Pv \u003d 220 W.
ตัวอย่าง 6.2มะเดื่อ 8.2 มอเตอร์ DC ของการกระตุ้นแบบขนานทำงานจากเครือข่าย Un = 220 V. Armature speed n2 = 1450 rpm กระแสไฟของมอเตอร์ I \u003d 500 A, อาร์เมเจอร์แบ็คอีเอ็มเอฟ E \u003d 202 V, ความต้านทานของขดลวดกระตุ้น Rv \u003d 44 โอห์ม ประสิทธิภาพของเครื่องยนต์
η = 0.88 กำหนด: 1. กระแสกระตุ้น; 2. กระดองปัจจุบัน; 3. ความต้านทานขดลวดกระดอง; 4. การใช้พลังงาน; 5.พลังเพลาที่เป็นประโยชน์; 6 การสูญเสียทั้งหมดในมอเตอร์; 7. การสูญเสียในขดลวดกระดอง; 8. การสูญเสียในขดลวดกระดอง; 9.แรงบิดบนเพลา
1. กระแสกระตุ้น:
![]()
2. กระดองปัจจุบัน:
Ia \u003d I - Iv \u003d 500 -5 \u003d 495 A.
3. ความต้านทานขดลวดกระดอง:
4. การใช้พลังงานจากเครือข่าย:
P1 \u003d Un ∙ I \u003d 220 ∙ 500 \u003d 110,000 W \u003d 110 kW
5. กำลังเพลาสุทธิ:
Р2 = P1 ∙ η = 110 ∙ 0.87 = 95.7 กิโลวัตต์
6. การสูญเสียทั้งหมดในมอเตอร์:
ΣP \u003d P1 - P2 \u003d 110 - 95.7 \u003d 14.3 กิโลวัตต์
เราแนะนำให้คุณอ่าน
 ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น
ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่
การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่ การวินิจฉัยการรักษาการรักษา urogenital chlamydia") Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia
Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร
ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร

