สำหรับปริมาณแรงบิด มอเตอร์เหนี่ยวนำการเปลี่ยนเฟสระหว่างกระแส I 2 และ e มีอิทธิพลอย่างมาก ดีเอส โรเตอร์ E 2S
พิจารณากรณีที่ความเหนี่ยวนำของขดลวดของโรเตอร์มีขนาดเล็ก ดังนั้นจึงละเลยการเปลี่ยนเฟสได้ (รูปที่ 223, a)
สนามแม่เหล็กที่หมุนของสเตเตอร์จะถูกแทนที่ด้วยสนามของขั้ว N และ S ซึ่งหมุนตามเข็มนาฬิกา ใช้กฎของมือขวากำหนดทิศทาง e. ดีเอส และกระแสในโรเตอร์ที่คดเคี้ยว กระแสของโรเตอร์ซึ่งมีปฏิสัมพันธ์กับสนามแม่เหล็กหมุนสร้างแรงบิด ทิศทางของแรงที่กระทำต่อตัวนำกระแสไฟฟ้าที่กำหนดโดยกฎมือซ้าย ดังที่เห็นได้จากภาพวาด โรเตอร์ภายใต้การกระทำของแรงจะหมุนไปในทิศทางเดียวกับสนามที่หมุน นั่นคือตามเข็มนาฬิกา
และกระดองยังเป็นชุดลามิเนตซึ่งมักจะอยู่บนเพลา สวิตช์แม่เหล็กแปรงคอยล์ มีการติดตั้งขดลวดเดี่ยวระหว่างขั้วตรงข้ามของแม่เหล็กอย่างง่าย เมื่อขดลวดอยู่ในแนวตั้ง การไหลของอิเล็กตรอนตามปกติจะมาจากขั้วบวกไปยังขั้วลบ ฟีดทำด้วยแปรงที่สัมผัสกับส่วนต่างๆ สวิตซ์. จากกฎการเหนี่ยวนำแม่เหล็กไฟฟ้าของฟาราเดย์ - กฎมือซ้าย ส่วนบนของไส้กระสวยจะถูกบังคับจากขวาไปซ้าย
พิจารณากรณีที่สองเมื่อความเหนี่ยวนำของขดลวดโรเตอร์มีขนาดใหญ่ ในกรณีนี้เฟสจะเลื่อนระหว่างกระแสของโรเตอร์ I 2 และ e ดีเอส โรเตอร์ E 2S ก็จะมีขนาดใหญ่เช่นกัน ในรูป 223, b, สนามแม่เหล็กของสเตเตอร์ของมอเตอร์เหนี่ยวนำยังคงแสดงอยู่ในรูปแบบของเสาหมุนตามเข็มนาฬิกา N และ S ทิศทางของ e ดีเอส ยังคงเหมือนเดิมตามในรูป 223, a แต่เนื่องจากกระแสในเฟสล่าช้า แกน สนามแม่เหล็กโรเตอร์จะไม่ตรงกับเส้นที่เป็นกลางของสนามสเตเตอร์อีกต่อไป แต่จะเลื่อนไปตามมุมบางมุมกับการหมุนของสนามแม่เหล็ก สิ่งนี้จะนำไปสู่ความจริงที่ว่าพร้อมกับการก่อตัวของแรงบิดในทิศทางเดียวตัวนำบางตัวจะสร้างแรงบิดที่ตรงกันข้าม
ส่วนล่างจะถูกบังคับไปในทิศทางตรงกันข้าม เนื่องจากขดลวดถูกออกแบบมาให้หมุน แรงเหล่านี้จะสร้างแรงบิดซึ่งจะทำให้ขดลวดหมุนไปในทิศทางทวนเข็มนาฬิกา บทบาทของสวิตช์คือเพื่อให้แน่ใจว่าการไหลของอิเล็กตรอน ไปในทิศทางที่ถูกต้องเสมอ เนื่องจากกระสวยแต่ละข้างทำเครื่องหมายที่เสาของคุณ สวิตช์ประกอบด้วยส่วนของสีบรอนซ์ที่แยกจากแผ่นฉนวนกันยุง แปรงถ่านสัมผัสกับสวิตช์
มุมการหมุน แรงบิดเปลี่ยนระหว่างการหมุน หากใช้การหมุน 90° สองครั้งร่วมกับแม่เหล็กสองตัวที่แยกจากกันที่ 90° แรงบิดเอาต์พุตจะคงที่ในทางปฏิบัติ โดยการแนะนำขดลวดที่สอง สับเปลี่ยนต้องมีสี่ส่วนแยกกัน
จากสิ่งนี้จะเห็นได้ว่าแรงบิดทั้งหมดของมอเตอร์ในระหว่างการเปลี่ยนเฟสระหว่างกระแสและ e ดีเอส โรเตอร์มีขนาดเล็กกว่าเคสเมื่อ I 2 และ E 2S อยู่ในเฟส สามารถพิสูจน์ได้ว่าแรงบิดของมอเตอร์เหนี่ยวนำถูกกำหนดโดยส่วนประกอบที่ทำงานอยู่ของกระแสโรเตอร์เท่านั้น นั่นคือ กระแส I 2 cos และสามารถคำนวณได้โดยสูตร:
การสูญเสียทั้งหมดผ่านสวิตช์เกิดจากทั้งแรงเสียดทานทางกลและความเค้นของมือ อย่างไรก็ตาม ความสูญเสียทั้งสองมีน้อยหากมอเตอร์ติดตั้งพัดลม มอเตอร์ซิงโครนัสได้รับการตั้งชื่อตามชื่อดังกล่าวเนื่องจากทำงานด้วยความเร็วเดียว นั่นคือความเร็วของการหมุนของสนามแม่เหล็ก สามารถผลิตสนามแม่เหล็กหมุนได้ ใช้ขดลวดสเตเตอร์ 3 ตัว เว้นระยะ 120 องศาโดยกระแสไฟสามเฟส ความเร็วในการหมุนของสนามขึ้นอยู่กับความถี่ของกระแส
การออกแบบทางกลแสดงเป็นแผนผังในรูปที่ ลักษณะแรงบิดสำหรับมอเตอร์ซิงโครนัส สนามแม่เหล็กหมุนที่เกิดจากขดลวดสเตเตอร์และโรเตอร์ ซึ่งสามารถเปรียบเทียบได้กับแม่เหล็กถาวรประเภทแท่งซึ่งอยู่ในแนวเดียวกับฟลักซ์หมุนเดี่ยวที่ผลิตในสเตเตอร์ เมื่อเพลาถูกกระตุ้นด้วยกลไก สนามที่สร้างโดยโรเตอร์จะถูกลบออกจากแนวเดียวกับสนามที่สร้างโดยสเตเตอร์ ลักษณะเฉพาะ มอเตอร์ซิงโครนัสมักจะนำเสนอในรูปแบบต่างๆ จากสมการข้างต้นจะเห็นได้ว่ามอเตอร์ซิงโครนัสไม่มีแรงบิดเริ่มต้น และต้องหมุนโรเตอร์เป็นความเร็วซิงโครนัสด้วยวิธีอื่น
Ф m - ฟลักซ์แม่เหล็กสเตเตอร์ (และประมาณเท่ากับฟลักซ์แม่เหล็กที่เกิดขึ้นของมอเตอร์เหนี่ยวนำ);
มุมเฟสระหว่าง e. ดีเอส และกระแสเฟสที่คดเคี้ยว
C คือสัมประสิทธิ์คงที่
หลังการทดแทน:
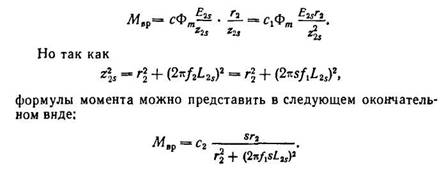
จากนิพจน์สุดท้าย จะเห็นได้ว่าแรงบิดของมอเตอร์เหนี่ยวนำขึ้นอยู่กับสลิป
ข้อดีของมอเตอร์ซิงโครนัสคือความสะดวกในการควบคุมตัวประกอบกำลัง ความเร็วในการหมุนคงที่โดยไม่คำนึงถึงภาระที่ใช้ มอเตอร์เหนี่ยวนำ สเตเตอร์ มอเตอร์เหนี่ยวนำคล้ายกับเครื่องกำเนิดไฟฟ้า กระแสสลับและถ้ารถถูกขับเคลื่อนด้วยกระแสไฟ จะทำให้เกิดฟลักซ์แม่เหล็กที่หมุนได้ โรเตอร์สามารถใส่ในกรงหรือใช้วงแหวนกันลื่น
แผนผังแสดงมอเตอร์เหนี่ยวนำ ในมอเตอร์แบบเฟรม โรเตอร์เคลือบด้วยลามิเนต และตัวนำมีแท่งทองแดงเปลือยหรือเปลือย อลูมิเนียมถูกป้อนผ่านช่องของโรเตอร์ แท่งเชื่อมที่ปลายแต่ละด้านด้วยวงแหวนหรือแผ่นเพื่อทำเป็นมัดลวดสั้น เครื่องเลื่อนมีแกนเคลือบและ ขดลวดสามเฟสคล้ายกับสเตเตอร์และเชื่อมต่อกับวงแหวนสามวงบนเพลา แผนผังของมอเตอร์เหนี่ยวนำแสดงให้เห็นว่ามีขดลวดสเตเตอร์สามขดลวดโดยเว้นระยะห่างกัน 120°
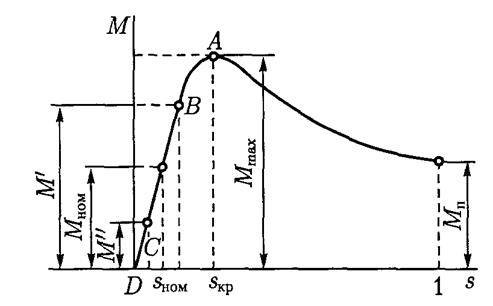
ในรูป 224 แสดงเส้นโค้ง A ของแรงบิดมอเตอร์เทียบกับสลิป จะเห็นได้จากเส้นโค้งว่าในขณะที่สตาร์ท เมื่อ s=l และ n = 0 แรงบิดของมอเตอร์มีขนาดเล็ก นี่คือคำอธิบายโดยข้อเท็จจริงที่ว่าในขณะที่เริ่มต้น ความถี่ของกระแสในขดลวดโรเตอร์จะสูงที่สุดและความต้านทานอุปนัยของขดลวดมีขนาดใหญ่ ส่งผลให้ cos มีค่าน้อย (เพราะ
หากขดลวดสเตเตอร์ขับเคลื่อนด้วยกระแสไฟสามเฟส สนามแม่เหล็กหมุนจะถูกสร้างขึ้นในสเตเตอร์ รูปแสดงขดลวดโรเตอร์เดี่ยว ในช่วงเวลาที่เหลือ สนามหมุนจะทำให้เกิดแรงดันไฟฟ้าในกระดิ่งของโรเตอร์เมื่อกระแสเปลี่ยนไป ถ้าขดลวดก่อตัวเป็นวงปิด แรง EMF ที่เหนี่ยวนำจะเหนี่ยวนำให้เกิดกระแสในขดลวด แรงลัพธ์บนตัวนำที่กระแสไหลผ่านจะส่งผลในครู่หนึ่งซึ่งจะเป็น เร่งความเร็วของโรเตอร์ ความเร็วของโรเตอร์จะเพิ่มขึ้นจนกว่าแรงบิดแม่เหล็กไฟฟ้าจะสมดุล จนถึงช่วงเวลาของการโหลดทางกล
|
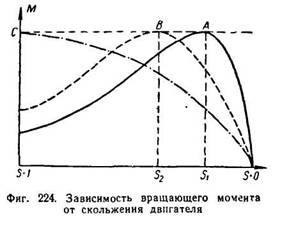
แถว 0.1-0.2) ดังนั้นแม้ว่ากระแสไฟเริ่มต้นจะมีขนาดใหญ่ แต่แรงบิดในการสตาร์ทก็จะน้อย
ด้วยสลิป S 1 แรงบิดของมอเตอร์จะมีค่าสูงสุด เมื่อการลื่นไถลลดลงอีกหรือกล่าวอีกนัยหนึ่งด้วยความเร็วรอบการหมุนของเครื่องยนต์ที่เพิ่มขึ้น แรงบิดจะลดลงอย่างรวดเร็ว
มอเตอร์เหนี่ยวนำจะไม่มีวันไปถึงความเร็วซิงโครนัส เนื่องจากจะเป็นการเคลื่อนที่สัมพัทธ์ระหว่างโรเตอร์กับสนามการหมุนของขดลวด ซึ่งจะทำให้ไม่มีแรง EMF แม่เหล็กไฟฟ้าในขดลวดของโรเตอร์ ดังนั้นจึงไม่มีแรงบิดแม่เหล็กไฟฟ้า ดังนั้นมอเตอร์เหนี่ยวนำจะทำงานที่ความเร็วน้อยกว่าความเร็วซิงโครนัสเล็กน้อย
ฟังก์ชันแรงบิด-แรงบิดแสดงอยู่ในรูป แรงบิดที่ชาร์จเต็ม แรงบิดเลื่อน รูปที่ ลักษณะแรงบิดสำหรับมอเตอร์แบบอะซิงโครนัส เมื่อความเร็วของโรเตอร์เท่ากับซิงโครนัส = 0 แรงบิดจะเป็นศูนย์ หากความเร็วของโรเตอร์ต่ำกว่าการซิงโครไนซ์ แรงบิดจะเพิ่มขึ้นเป็นเส้นตรงโดยประมาณจนถึงค่าสูงสุดที่กำหนดโดยเวลาโหลดทั้งหมดและต้องการการสูญเสียที่มากเกินไปผ่านโรเตอร์ มอเตอร์เหนี่ยวนำถือได้ว่าเป็นเครื่องจักรที่มีความเร็วคงที่ อันที่จริง ความยากในการเปลี่ยนความเร็วเป็นหนึ่งเดียว ข้อเสียของมอเตอร์แบบอะซิงโครนัส
ในการเซและเมื่อเลื่อน s = 0 แรงบิดของเครื่องยนต์ก็จะเท่ากับศูนย์เช่นกัน
ควรสังเกตว่าในมอเตอร์แบบอะซิงโครนัสจะไม่มีสลิปเท่ากับศูนย์ สิ่งนี้เป็นไปได้ก็ต่อเมื่อโรเตอร์ได้รับแรงบิดจากภายนอกในทิศทางการหมุนของสนามสเตเตอร์
แรงบิดเริ่มต้นสามารถเพิ่มได้หากในขณะที่เริ่มต้นเฟสเปลี่ยนระหว่างกระแสและ e ดีเอส โรเตอร์ จากสูตร
ปัญหาเกี่ยวกับมอเตอร์แบบอะซิงโครนัส การสตาร์ทเครื่องยนต์ การเบรกของเครื่องยนต์ การควบคุมความเร็ว นอกจากนี้ยังสามารถคิดได้ว่าเป็นมอเตอร์แบบซิงโครนัสแบบไม่ต่อเนื่อง จำนวนขั้นตอนต้องตรงกับจำนวนพัลส์ควบคุมที่ใช้กับเฟสของมอเตอร์ การหมุนจะดำเนินการจริงด้วยขั้นตอนเวลาที่จำกัด
เมื่อใช้เฟสสเตเตอร์ สนามแม่เหล็กจะถูกสร้างขึ้นซึ่งโต้ตอบกับฟลักซ์แม่เหล็กถาวร ทำให้เกิดแรงบิดที่เคลื่อนโรเตอร์ การป้อนเฟสจะดำเนินการโดยใช้พัลส์ขั้ว interleaved ซึ่งทำให้โครงสร้างของอุปกรณ์ควบคุมซับซ้อน เรียกว่าคำสั่งไบโพลาร์
จะเห็นได้ว่าหากมีความต้านทานอุปนัยคงที่ของขดลวดของโรเตอร์ ความต้านทานเชิงแอคทีฟจะเพิ่มขึ้น มุมเองก็จะลดลง ซึ่งจะนำไปสู่ความจริงที่ว่าแรงบิดของมอเตอร์จะเพิ่มขึ้นเช่นกัน ใช้ในทางปฏิบัติเพื่อเพิ่มแรงบิดในการสตาร์ทเครื่องยนต์ ในขณะที่สตาร์ท ความต้านทานแบบแอ็คทีฟ (รีโอสแตตสตาร์ท) จะถูกใส่เข้าไปในวงจรโรเตอร์ ซึ่งจะถูกลบออกทันทีที่เครื่องยนต์เพิ่มความเร็ว
มอเตอร์ประเภทนี้ให้แรงบิดและแรงบิดของมอเตอร์สูงขึ้นเพื่อรักษาโรเตอร์แม้ในกรณีที่ไม่มีเฟสป้อน โรเตอร์ประกอบด้วยแม่เหล็กทรงกระบอกแม่เหล็กตามแนวแกน ขั้นบันไดเชิงมุมมีตั้งแต่ 0.9 ถึง -5° แต่ส่วนใหญ่ใช้ 1.8°
ความหมายและองค์ประกอบเชิงสร้างสรรค์ บนเครื่องเหนี่ยวนำทั่วไป สนามแม่เหล็กถูกสร้างขึ้นโดยตัวแปร กระแสไฟฟ้า. ความคดเคี้ยวของกระแสน้ำเหล่านี้เรียกว่า ขดลวดปฐมภูมิซึ่งสามารถเป็นเฟสเดียวหรือหลายเฟสก็ได้ เครื่องจักรแบบเฟสเดียวสร้างขึ้นสำหรับพลังงานต่ำถึงสองสามกิโลวัตต์ เครื่องจักรทั่วไปเป็นแบบสามเฟส
การเพิ่มแรงบิดเริ่มต้นจะทำให้ได้แรงบิดสูงสุดของมอเตอร์ที่มีการลื่นมากขึ้น (จุด S 2 ของเส้นโค้ง B ในรูปที่ 224) โดยการเพิ่มความต้านทานเชิงแอ็คทีฟของวงจรโรเตอร์เมื่อสตาร์ทเครื่อง เป็นไปได้ที่จะบรรลุแรงบิดสูงสุดในขณะที่สตาร์ทเครื่อง (s = 1 โค้ง C)
แรงบิดของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังสองของแรงดันไฟ ดังนั้นแม้แรงดันไฟฟ้าที่ลดลงเล็กน้อยก็มาพร้อมกับแรงบิดที่ลดลงอย่างรวดเร็ว
ส่วนที่ใช้งานที่สองของรถคือสถานที่ที่ ขดลวดทุติยภูมิ. ตามกฎแล้ว ส่วนคงที่ของเครื่องทำหน้าที่เป็นตัวเหนี่ยวนำและโรเตอร์จะถูกเหนี่ยวนำ เครื่องเหนี่ยวนำแบบธรรมดาสร้างขึ้นในสองรูปแบบ: เครื่องเหนี่ยวนำที่มีโรเตอร์แบบวงแหวนหรือโรเตอร์แบบคดเคี้ยว โดยที่โรเตอร์โรเตอร์แบบสลับหลายเฟสเชื่อมต่อกับวงแหวนสลิป และเครื่องเหนี่ยวนำที่มีโรเตอร์ตั้งแต่หนึ่งตัวขึ้นไป
เครื่องเหนี่ยวนำหลายเฟสสามารถทำงานเป็นมอเตอร์ เครื่องกำเนิดไฟฟ้า หรือเบรกแม่เหล็กไฟฟ้า มันถูกใช้เป็นมอเตอร์ในระดับสูงสุดและเป็นมอเตอร์ไฟฟ้าทั่วไปเนื่องจากคุณสมบัติที่โดดเด่น ความเรียบง่ายของโครงสร้าง และการทำงานที่ปลอดภัย
กำลัง P 1 ที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์เหนี่ยวนำเท่ากับ:
![]()
โดยที่ m 1 คือจำนวนเฟส
สเตเตอร์ของมอเตอร์มีการสูญเสียพลังงานดังต่อไปนี้:
1) ในขดลวดสเตเตอร์ R es =m 1 I 1 2 r 1 ;
2) ในเหล็กสเตเตอร์และฮิสเทรีซิสและกระแสน้ำวน พี ซี .
พลังงานที่จ่ายให้กับโรเตอร์คือพลังของสนามแม่เหล็กหมุนหรือที่เรียกว่าพลังงานแม่เหล็กไฟฟ้า P eM
เครื่องเหนี่ยวนำถูกสร้างขึ้นสำหรับแรงดันไฟฟ้าสูงถึง 10 kV กำลังไฟตั้งแต่ไม่กี่วัตต์จนถึงหลายสิบเมกะวัตต์และตั้งแต่หลายแสนถึงหนึ่งแสนรอบต่อนาที ขนาดที่ระบุจะระบุไว้บนแผ่นดัชนีรถ เตารีดแบบแอกทีฟเป็นเครื่องเหนี่ยวนำที่มีส่วนคงที่ สเตเตอร์ พร้อมกับโมโนหรือ กระแสไฟสามเฟสเช่นเดียวกับชิ้นส่วนที่เคลื่อนไหว โรเตอร์
รูปที่ 1 แสดงมอเตอร์แบบอะซิงโครนัสพร้อมเพลาข้อเหวี่ยงที่ถอดประกอบ ในรูป 2 แสดงส่วนตามยาวของมอเตอร์คอยล์แบบอะซิงโครนัสพร้อมโรเตอร์คอยล์ที่มีกรงกระรอกและอุปกรณ์ยกแปรงบนวงแหวนลื่น เครื่องเหนี่ยวนำมีเหล็กคงที่ซึ่งใช้น้อยที่สุดและพิจารณาจากการพิจารณาทางกล บุชชิ่งมีค่าตั้งแต่ 0.2 ถึง 2 มม. ค่าเล็กน้อยที่สัมพันธ์กับเครื่องจักรที่มีกำลังวัตต์ และค่ามากสำหรับเครื่องจักรอันทรงพลังที่มีสภาพการทำงานที่รุนแรง
กำลังไฟฟ้าแม่เหล็กไฟฟ้าเท่ากับความแตกต่างระหว่างกำลังที่จ่ายให้กับมอเตอร์กับการสูญเสียในสเตเตอร์ของมอเตอร์ กล่าวคือ
|
ความแตกต่างระหว่าง Р eM และแสดงถึงการสูญเสียทางไฟฟ้าในขดลวดของโรเตอร์ Р eP หากเราละเลยการสูญเสียในเหล็กโรเตอร์เนื่องจากไม่มีนัยสำคัญ (ความถี่ remagnetization ของโรเตอร์มักจะมีขนาดเล็กมาก):
รถยนต์ธรรมดาที่มีพลังของเกวียนและรถยนต์ขนาดใหญ่ทรงพลังพร้อมสภาพการทำงานที่หนักหน่วง สันเขาเป็นแบบกึ่งปิด บนเครื่องด้วย ไฟฟ้าแรงสูงใช้เฉพาะช่องเปิดที่ทำขดลวดแยกกัน เครื่องเหนี่ยวนำใช้เฉพาะในขดลวดและในสองชั้นเพื่อให้ได้สนามแม่เหล็กที่มีเนื้อหาฮาร์มอนิกที่สูงขึ้นให้น้อยที่สุด ขดลวดสเตเตอร์ในสองชั้นมักทำด้วยระยะพิทช์สั้น และโรเตอร์โรเตอร์สองชั้นแบบโรตารี่ที่มีระยะพิทช์แบบไดอะเมตริก
การห่อในกรงขนาดเล็กถึงขนาดกลางมักทำด้วยโรเตอร์พิตช์ระยะพิทช์สั้นและเส้นผ่านศูนย์กลาง 2 ชั้น การขนส่งในยานพาหนะขนาดเล็กและขนาดกลางดำเนินการในขนาดใหญ่ด้วยอะลูมิเนียมภายใต้แรงกดดัน เช่นเดียวกับในทองแดง ทองแดง หรือทองเหลือง
ดังนั้นการสูญเสียในการหมุนของโรเตอร์จึงเป็นสัดส่วนกับสลิปของโรเตอร์
ถ้ามาจาก พลังงานกลพัฒนาโดยโรเตอร์ ลบการสูญเสียทางกล R mx เนื่องจากแรงเสียดทานในตลับลูกปืนของโรเตอร์ แรงเสียดทานในอากาศ ฯลฯ รวมถึงการสูญเสียเพิ่มเติม R D ที่เกิดขึ้นภายใต้ภาระและเนื่องจากสนามเร่ร่อนของโรเตอร์ และการสูญเสียที่เกิดจาก: การเต้นของสนามแม่เหล็ก ในฟันสเตเตอร์และโรเตอร์จากนั้นจะมีกำลังที่มีประโยชน์บนเพลามอเตอร์ซึ่งเราแสดงด้วย P 2 .
โรเตอร์เพลาข้อเหวี่ยงนั้นเรียบง่ายกว่า แข็งแกร่งกว่า และราคาถูกกว่าวงแหวนแบบวงแหวน ดังนั้นเมื่อไม่ต้องการความเร็วเริ่มต้นพิเศษและการเปลี่ยนแปลงใดๆ โรเตอร์เหล่านี้จึงถูกใช้อย่างกว้างขวางในการใช้พลังงานต่ำถึงปานกลาง เพื่อลดเสียงรบกวน สล็อตแบบธรรมดาจะใช้กับทางลาดที่มากที่สุดเท่าที่จะเป็นไปได้และเอียงไปทางเครื่องกำเนิดไฟฟ้า และในกรณีของไมโครแมชชีน จะมีการใช้การออกแบบพิเศษ เช่น โรเตอร์แบบไม่มีร่อง ซึ่งประกอบไปด้วยชั้นแนวรัศมี แนวแกนหรือแนวสัมผัสหลายชั้น มอเตอร์ฮิสเทรีซิส และโถชักโครก - มอเตอร์แบบโรตารี่รูปทรง
ประสิทธิภาพของมอเตอร์เหนี่ยวนำสามารถกำหนดได้โดยสูตร:

จากนิพจน์สุดท้าย จะเห็นได้ว่าโมเมนต์ของการหมุนของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับผลคูณของขนาดของฟลักซ์แม่เหล็กที่หมุนอยู่ กระแสของโรเตอร์ และโคไซน์ของมุมระหว่าง e ดีเอส โรเตอร์และกระแสของมัน
รูปร่างของรถขึ้นอยู่กับประเภทของโครงสร้างรถ โดยทั่วไปแล้ว ยานพาหนะที่ใช้พลังงานต่ำถึงปานกลางจะมีกล้องติดเกราะตามที่เห็นในรูป ในขณะที่ยานพาหนะขนาดใหญ่มีสเตเตอร์แยกต่างหากติดอยู่กับแผ่นฐานทั่วไป รถยนต์ขนาดเล็กและขนาดกลางมักจะมีตลับลูกปืน ในขณะที่รถยนต์ขนาดใหญ่จะมีตลับลูกปืนแบบเลื่อน เมื่อใช้การวิ่งที่ราบรื่น ตลับลูกปืนธรรมดาก็ใช้สำหรับรถยนต์ขนาดเล็กเช่นกัน
เหล็กหล่อและเหล็กกล้าใช้เป็นวัสดุหล่อ มีการใช้เหล็กทั้งแบบปกติและเมื่อมีวัตถุประสงค์เพื่อลดน้ำหนักของยานพาหนะ เครื่องจักรที่มีขนาดไม่เกิน 4 kW มักติดตั้งตัวเรือนอะลูมิเนียม เครื่องเหนี่ยวนำทำงานในโหมดเครื่องกำเนิดไฟฟ้า มอเตอร์ หรือเบรกที่สัมพันธ์กับความเร็วของโรเตอร์ของโรเตอร์ที่สัมพันธ์กับสนามแม่เหล็กซิงโครนัสของสนามแม่เหล็กย้อนกลับ เมื่อพลังงานแม่เหล็กไฟฟ้าเข้าสู่โรเตอร์และทำงานโดยอัตโนมัติในที่โล่ง โหมดมอเตอร์จะเกิดขึ้น

จากวงจรสมมูลของมอเตอร์แบบอะซิงโครนัส จะได้ค่าของกระแสโรเตอร์ที่ลดลง ซึ่งเราให้โดยไม่มีการพิสูจน์
![]()
กราฟแสดงการพึ่งพาโมเมนต์แม่เหล็กไฟฟ้าบนสลิปเรียกว่า ลักษณะทางกลมอเตอร์เหนี่ยวนำ (รูปที่ 3.3)
ข้าว. 3.3. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
สามารถใช้สูตรคำนวณแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์เหนี่ยวนำอย่างง่าย (สูตร Kloss) เพื่อสร้าง ลักษณะทางกล

ในกรณีนี้ สลิปวิกฤตถูกกำหนดโดยสูตร
![]()
โดยที่ λ m \u003d M max / M nom - ความจุเกินของเครื่องยนต์
เมื่อคำนวณลักษณะทางกล ควรระลึกไว้เสมอว่าด้วยค่าสลิปที่เกินค่าวิกฤต ความแม่นยำของการคำนวณจะลดลงอย่างรวดเร็ว นี่เป็นเพราะการเปลี่ยนแปลงในพารามิเตอร์ของวงจรสมมูลของมอเตอร์แบบอะซิงโครนัส ซึ่งเกิดจากการอิ่มตัวของแม่เหล็กของสเตเตอร์และฟันของโรเตอร์ และการเพิ่มขึ้นของความถี่ของกระแสในขดลวดของโรเตอร์
รูปร่างของลักษณะทางกลของมอเตอร์เหนี่ยวนำส่วนใหญ่ขึ้นอยู่กับขนาดของแรงดันไฟฟ้าที่ใช้กับขดลวดสเตเตอร์ ยู 1 (รูปที่ 3.4) และความต้านทานเชิงรุกของขดลวดโรเตอร์ r"2 (รูปที่ 3.5)

ข้าว. 3.4. อิทธิพลของแรงดันไฟฟ้า ยู 1 เกี่ยวกับลักษณะทางกลของมอเตอร์เหนี่ยวนำ
ข้อมูลที่ระบุในแคตตาล็อกสำหรับมอเตอร์แบบอะซิงโครนัสมักจะไม่มีข้อมูลเกี่ยวกับพารามิเตอร์ของวงจรสมมูล ซึ่งทำให้ยากต่อการใช้สูตรในการคำนวณแรงบิดแม่เหล็กไฟฟ้า ดังนั้นในการคำนวณโมเมนต์แม่เหล็กไฟฟ้าจึงมักใช้สูตรนี้

ข้าว. 3.5. อิทธิพลของการต่อต้าน ร" 2 เกี่ยวกับลักษณะทางกลของมอเตอร์เหนี่ยวนำ
คุณสมบัติการทำงานของมอเตอร์แบบอะซิงโครนัสถูกกำหนดโดยลักษณะการทำงาน: การพึ่งพาความเร็วในการหมุน น 2 ,แรงบิดของเพลา เอ็ม 2 ประสิทธิภาพและตัวประกอบกำลัง cosφ 1 จากน้ำหนักบรรทุกของเครื่องยนต์ R 2 .
เมื่อคำนวณพารามิเตอร์เพื่อกำหนดประสิทธิภาพของมอเตอร์เหนี่ยวนำ จะใช้วิธีกราฟิกตามการสร้างแผนภูมิวงกลมหรือวิธีการวิเคราะห์
พื้นฐานสำหรับการดำเนินการตามวิธีการคำนวณประสิทธิภาพใดๆ คือผลลัพธ์ของการทดสอบวงจรเปิดและไฟฟ้าลัดวงจร หากเครื่องยนต์ได้รับการออกแบบ ข้อมูลเหล่านี้จะได้รับในกระบวนการคำนวณ
เมื่อคำนวณความต้านทานของตัวต้านทาน r ext ใช้ในวงจรสเตเตอร์หรือเฟสโรเตอร์เพื่อจำกัดกระแสสตาร์ทหรือการควบคุมความเร็ว ใช้หลักการ: สำหรับมอเตอร์แบบอะซิงโครนัสโดยเฉพาะนี้ สลิป สสัดส่วนกับความต้านทานเชิงแอคทีฟของวงจรโรเตอร์ของเครื่องยนต์นี้ ตามนี้ ความเท่าเทียมกัน
(r 2 + rต่อ) /s= r2/sชื่อ
ที่ไหน r2- ความต้านทานเชิงรุกของโรเตอร์ที่คดเคี้ยวที่อุณหภูมิการทำงาน ส-ลื่นเมื่อใส่ตัวต้านทานเข้าไปในวงจรโรเตอร์ที่มีความต้านทาน rต่อ
จากนิพจน์นี้ เราได้รับสูตรสำหรับคำนวณความต้านทานเชิงแอ็คทีฟของตัวต้านทานเพิ่มเติม g ถึง 6 ซึ่งจำเป็นเพื่อให้ได้สลิปที่เพิ่มขึ้นที่กำหนด สที่โหลดที่กำหนด (จัดอันดับ):
rต่อ = r 2 (s/s นาม - 1).
มีสองวิธีในการคำนวณรีโอสแตตเริ่มต้น: แบบกราฟิกและเชิงวิเคราะห์
วิธีกราฟิกแม่นยำยิ่งขึ้น แต่ต้องมีการสร้างลักษณะทางกลตามธรรมชาติและไดอะแกรมเริ่มต้นของเครื่องยนต์ ซึ่งเกี่ยวข้องกับงานกราฟิกจำนวนมาก
วิธีวิเคราะห์การคำนวณรีโอสแตตเริ่มต้นนั้นง่ายกว่า แต่แม่นยำน้อยกว่า นี่เป็นเพราะวิธีการนี้ขึ้นอยู่กับสมมติฐานของความตรงของส่วนการทำงานของลักษณะทางกลตามธรรมชาติของมอเตอร์เหนี่ยวนำ แต่เมื่อการเลื่อนใกล้ถึงวิกฤต สมมติฐานนี้ทำให้เกิดข้อผิดพลาดที่เห็นได้ชัดเจน ซึ่งยิ่งมีนัยสำคัญ ยิ่งแรงบิดเริ่มต้นยิ่งใกล้ เอ็ม 1 ถึงแรงบิดสูงสุด เอ็ม ม. ดังนั้นวิธีคำนวณเชิงวิเคราะห์จึงใช้ได้กับค่าของแรงบิดเริ่มต้นเริ่มต้นเท่านั้น เอ็ม 1 < 0.7 เอ็ม อ่าาา .
ความต้านทานของตัวต้านทานในขั้นตอนของลิโน่สตาร์ท:
ที่สาม rต่อ 3 = r 2 (λ ม. - 1);
ที่สอง rต่อ2 = rเพิ่ม3 λ ม.;
แรก rต่อ 1 = rเพิ่ม2 λ ม.
ที่ไหน r 2 - ความต้านทานเชิงแอคทีฟของเฟสที่คดเคี้ยวของโรเตอร์ของมอเตอร์เหนี่ยวนำ
ที่ไหน อี 2 และ ฉัน 2nom - ข้อมูลแคตตาล็อกสำหรับขนาดมอเตอร์ที่เลือก
ความต้านทานของลิโน่สตาร์ทตามขั้นตอน:
แรก R PR1 = rต่อ 1 + rต่อ 2 + rต่อ 3 ;
วินาที R PR2 = rต่อ 2 + rต่อ3
ที่สาม R PR2 = rต่อ 3
เพื่อจำกัดกระแสเริ่มต้นของมอเตอร์แบบอะซิงโครนัสด้วย โรเตอร์กรงกระรอกใช้วงจรพิเศษเพื่อรวมองค์ประกอบที่จำกัดกระแสเริ่มต้น วิธีการทั้งหมดนี้มีพื้นฐานมาจากการลดแรงดันไฟฟ้าที่ใช้กับขดลวดสเตเตอร์ วงจรที่ใช้กันอย่างแพร่หลายมากที่สุดโดยมีตัวต้านทานหรือโช้กอยู่ในสายไฟเชิงเส้นของสเตเตอร์ (ดูรูปที่ 3.14 ข) การคำนวณความต้านทานที่ต้องการขององค์ประกอบเหล่านี้สำหรับการลดกระแสเริ่มต้นที่กำหนด a เทียบกับค่าธรรมชาติจะดำเนินการตามสูตร:
สำหรับตัวต้านทานที่มีความต้านทานแบบแอคทีฟ
Rน = 
สำหรับสำลัก
Xล= 
อิมพีแดนซ์ของมอเตอร์ในโหมดลัดวงจร Z k โอห์ม
Z k = คุณ 1 /ฉัน พี
ที่นี่ Xถึงและ r k - ส่วนประกอบอุปนัยและแอคทีฟของความต้านทานนี้
R k = Z k cosφ k ; x k =
ลดแรงบิดเริ่มต้นเทียมเมื่อเปิดเครื่อง R หรือ หลี่ จะ
α m = α 2 ผม
ตารางที่3.1
ดังนั้นหากตั้งค่า α m ซึ่งกำหนดค่าของแรงบิดเริ่มต้นเทียม M "n ให้คำนวณค่าที่สอดคล้องกัน R ก็ไม่เช่นกัน x หลี่คุณสามารถใช้สูตรข้างต้นแทนค่า α 2 . ได้ ผม, ค่าของ α m.
ความต้านทานไฟฟ้าขดลวดมอเตอร์ที่ระบุในแคตตาล็อกมักจะสัมพันธ์กับอุณหภูมิ +20 °C แต่เมื่อคำนวณคุณสมบัติและพารามิเตอร์ของมอเตอร์ ความต้านทานของขดลวดจะต้องถูกนำไปที่อุณหภูมิการทำงาน ตามมาตรฐานปัจจุบัน อุณหภูมิในการทำงานจะขึ้นอยู่กับระดับความต้านทานความร้อน ฉนวนไฟฟ้าใช้ในเครื่องยนต์: ด้วยความต้านทานความร้อนระดับ B อุณหภูมิในการทำงานคือ 75 ° C และด้วยระดับความต้านทานความร้อน F และ H - 115 ° C การคำนวณความต้านทานของขดลวดต่ออุณหภูมิการทำงานใหม่ทำได้โดยการคูณความต้านทานของขดลวดที่อุณหภูมิ 20 ° C โดยค่าสัมประสิทธิ์ความร้อน k t:
r= r 20k ที
ค่าสัมประสิทธิ์นี้ขึ้นอยู่กับวัตถุประสงค์ของเครื่องยนต์และขนาด (ความสูงของแกนหมุน) (ตารางที่ 3.1)
เครื่องซิงโครนัส
แนวคิดพื้นฐาน
คุณลักษณะเฉพาะของเครื่องซิงโครนัสคือการเชื่อมต่อที่เข้มงวดระหว่างความเร็วของโรเตอร์ น 1 และความถี่ AC ในขดลวดสเตเตอร์ ฉ 1:
น 1 = ฉ 1 60/ R.
กล่าวอีกนัยหนึ่งสนามแม่เหล็กหมุนของสเตเตอร์และโรเตอร์ของเครื่องซิงโครนัสหมุน พร้อมกันนั่นคือด้วยความถี่เดียวกัน
ตามการออกแบบ เครื่องซิงโครนัสจะแบ่งออกเป็นเสาเด่นและเสาไม่เด่น ในเครื่องซิงโครนัสแบบซิงโครนัสแบบขั้วเด่น โรเตอร์มีขั้วที่เด่นชัดซึ่งเป็นที่ตั้งของขดลวดสนาม กระแสตรง. ลักษณะเฉพาะของเครื่องจักรดังกล่าวคือความแตกต่างของความต้านทานแม่เหล็กตามแกนตามยาว (ตามแกนของเสา) และตามแนวแกนตามขวาง (ตามแกนที่ผ่านในช่องว่างระหว่างขั้ว) ความต้านทานแม่เหล็กต่อการไหลของสเตเตอร์ตามแกนตามยาว ddความต้านทานแม่เหล็กน้อยกว่ามากต่อการไหลของสเตเตอร์ แกนตามขวาง คิวคิวในเครื่องซิงโครนัสแบบไม่มีขั้ว ความต้านทานแม่เหล็กตามแกนตามยาวและตามขวางจะเท่ากัน เนื่องจากช่องว่างอากาศสำหรับเครื่องเหล่านี้ตามแนวเส้นรอบวงของสเตเตอร์จะเท่ากัน
โดยหลักการแล้วการออกแบบสเตเตอร์ของเครื่องซิงโครนัสไม่แตกต่างจากสเตเตอร์ เครื่องอะซิงโครนัส. ในขดลวดสเตเตอร์ ระหว่างการทำงานของเครื่องจักร EMF จะถูกเหนี่ยวนำและกระแสไหลที่สร้างแรงแม่เหล็ก (MFF) ซึ่งค่าสูงสุดคือ
F 1 =0,45ม 1 ฉัน 1 w 1 k รอบ 1 / R
MDS นี้สร้างสนามแม่เหล็กหมุนและในช่องว่างอากาศ δ เครื่องสร้างการเหนี่ยวนำแม่เหล็ก ซึ่งกำหนดการกระจายภายในแต่ละขั้ว t ขึ้นอยู่กับการออกแบบของโรเตอร์ (รูปที่ 4.1)
สำหรับเครื่องซิงโครนัสขั้วเด่น สมการความเค้นนั้นใช้ได้:
Ú 1 =Ė 0 + Ė 1d+ Ė 1q+ Ė σ1 – İ 1 r 1
ที่ไหน Ė 0 - EMF หลักของเครื่องซิงโครนัส สัดส่วนกับฟลักซ์แม่เหล็กหลักของเครื่องซิงโครนัส F 0 ; Ė 1 d - EMF ของปฏิกิริยากระดองของเครื่องซิงโครนัสตามแกนตามยาว สัดส่วนกับ MMF ของปฏิกิริยากระดองตามแกนตามยาว F 1 วัน; Ė σ1 - ปฏิกิริยากระดอง EMF ตามแกนตามขวาง, สัดส่วนกับปฏิกิริยากระดอง MMF ตามแกนขวาง F 1q; Ė σ1 - EMF ของการรั่วไหลเนื่องจากมีการรั่วไหลของสนามแม่เหล็ก F 0 ค่าของ EMF นี้เป็นสัดส่วนกับความต้านทานการรั่วของขดลวดสเตเตอร์ X 1
Ė σ1 = เจİ 1r
İ 1 r 1 - แรงดันตกคร่อมในขดลวดเฟสสเตเตอร์ โดยปกติค่านี้จะถูกละเลยเมื่อแก้ปัญหาเนื่องจากมีค่าน้อย
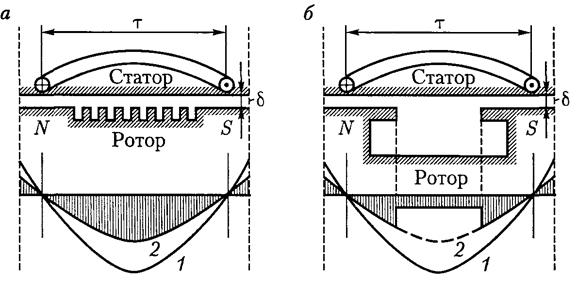
ข้าว. 4.1. กราฟการกระจายตัวเหนี่ยวนำแม่เหล็กตามแกนตามขวาง
ขั้วโดยปริยาย ( เอ) และขั้วที่ชัดเจน ( ข)เครื่องซิงโครนัส:
1 - กำหนดการ MDS; 2 - กราฟการเหนี่ยวนำแม่เหล็ก
สำหรับเครื่องซิงโครนัสแบบไม่มีขั้ว สมการความเค้นมีรูปแบบ
Ú 1 =Ė 0 + Ė ค- İ 1 r 1
ที่นี่
Ė ค= Ė 1 + Ė σ1
ที่ไหน Ė 1 - แรงเคลื่อนไฟฟ้าของอาร์เมเจอร์ของเครื่องซิงโครนัสขั้วโดยนัย สมการความเค้นที่พิจารณาแล้วสอดคล้องกับไดอะแกรมความเค้นเวกเตอร์ ต้องสร้างไดอะแกรมเหล่านี้เพื่อกำหนดแรงเคลื่อนไฟฟ้าหลักของเครื่อง อี 0 หรือแรงดันขดลวดสเตเตอร์ ยู 1. ควรระลึกไว้เสมอว่าสมการแรงดันไฟฟ้าและไดอะแกรมเวกเตอร์ที่สอดคล้องกันไม่ได้คำนึงถึงความอิ่มตัวของแม่เหล็กของวงจรแม่เหล็กของเครื่องซิงโครนัส ซึ่งดังที่คุณทราบ ส่งผลต่อค่าความต้านทานอุปนัย ทำให้พวกเขา ลด. การบัญชีสำหรับความอิ่มตัวนี้เป็นงานที่ยาก ดังนั้นในการคำนวณ EMF และแรงดันไฟฟ้าของเครื่องซิงโครนัสมักจะใช้ แผนภาพการปฏิบัติ EMF ซึ่งคำนึงถึงสถานะของความอิ่มตัวของระบบแม่เหล็ก ซึ่งเกิดจากการกระทำของปฏิกิริยากระดองเมื่อโหลดเครื่องซิงโครนัส เมื่อสร้างไดอะแกรม EMF ที่ใช้งานได้จริง แรงแม่เหล็กของปฏิกิริยาอาร์เมเจอร์จะไม่ถูกสลายไปเป็นส่วนประกอบตามยาวและตามขวาง ดังนั้น แผนภาพนี้จึงสามารถใช้ได้ทั้งในการคำนวณของขั้วเด่นและขั้วโดยนัย
เมื่อแก้ปัญหาที่เกี่ยวข้องกับเครื่องกำเนิดไฟฟ้าแบบซิงโครนัสที่เชื่อมต่อแบบขนานกับเครือข่ายหรือกับมอเตอร์ซิงโครนัสจะใช้ ลักษณะเชิงมุมเครื่องซิงโครนัสแทนการพึ่งพาโมเมนต์แม่เหล็กไฟฟ้า เอ็ม จากมุมโหลด θ ในกรณีนี้ ควรจำไว้ว่าในเครื่องซิงโครนัสเสาเด่นมีสองจุด: หลัก เอ็ม หลักและปฏิกิริยา เอ็ม p และในเครื่องที่ไม่สำคัญ - เฉพาะประเด็นหลัก:
![]()
มุมโหลด θ nom สอดคล้องกับแรงบิดที่กำหนด เอ็ม น. แรงบิดสูงสุดของเครื่องซิงโครนัสกำหนดความจุเกินของเครื่องซิงโครนัสซึ่งเป็นสิ่งสำคัญสำหรับทั้งสอง เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสทำงานควบคู่ไปกับเครือข่ายและสำหรับมอเตอร์ซิงโครนัส ในเครื่องซิงโครนัสขั้วที่ไม่เด่น ช่วงเวลาสูงสุดสอดคล้องกับมุมโหลด θ = 90° ในเครื่องขั้วเด่น θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного โมเมนต์แม่เหล็กไฟฟ้าเครื่องนี้.
ในการคำนวณมุมโหลดวิกฤต ซึ่งกำหนดความจุโอเวอร์โหลดของเครื่องซิงโครนัสแบบขั้วเด่น คุณสามารถใช้นิพจน์ได้
เราแนะนำให้คุณอ่าน
 ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น
ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่
การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่ การวินิจฉัยการรักษาการรักษา urogenital chlamydia") Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia
Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร
ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร

