สำหรับทุกคน มอเตอร์เหนี่ยวนำสามารถกำหนดโหมดระบุได้เช่น โหมดการทำงานระยะยาวซึ่งเครื่องยนต์ไม่ร้อนเกินอุณหภูมิที่ตั้งไว้ ช่วงเวลา M ที่ได้รับการจัดอันดับซึ่งสอดคล้องกับโหมดระบุจะถูกเรียก ช่วงเวลาเล็กน้อย สลิปพิกัดที่สอดคล้องกันสำหรับมอเตอร์แบบอะซิงโครนัสที่มีกำลังปานกลางคือ s H0M = 0.02 ... 0.06 เช่น พิกัดความเร็ว n และโอห์มอยู่ภายใน
น นอม = n 0 (1 - s 0) \u003d (0.94 ... 0.98) p 0
อัตราส่วนของแรงบิดสูงสุดต่อค่าเล็กน้อยต่อ m = = Mmax / M เรียกว่าความจุเกินของมอเตอร์แบบอะซิงโครนัส โดยปกติ k m \u003d 1.8 ... .2.5
เมื่อสตาร์ทเครื่อง กล่าวคือ เมื่อสตาร์ทเครื่องและระหว่างการเร่งความเร็ว มอเตอร์แบบอะซิงโครนัสจะอยู่ในสภาวะที่แตกต่างจากสภาวะการทำงานปกติอย่างมาก แรงบิดที่พัฒนาโดยมอเตอร์จะต้องเกินโมเมนต์ความต้านทานของโหลด มิฉะนั้น มอเตอร์จะไม่สามารถเร่งความเร็วได้ ดังนั้น จากมุมมองของการสตาร์ทเครื่องยนต์ แรงบิดในการสตาร์ทจึงมีบทบาทสำคัญ
อัตราส่วนของแรงบิดเริ่มต้น M p ที่พัฒนาโดยเครื่องยนต์ในสถานะหยุดนิ่งคือที่ n \u003d 0 ต่อแรงบิดที่กำหนด k p \u003d M p / M nom เรียกว่าหลายหลากของแรงบิดเริ่มต้น
โมเมนต์สูงสุด M max เรียกว่าช่วงเวลาวิกฤตของเครื่องอะซิงโครนัส การทำงานของเครื่องที่มีแรงบิดเกินพิกัดสามารถทำได้ในช่วงเวลาสั้น ๆ เท่านั้น มิฉะนั้นอายุการใช้งานของเครื่องจะลดลงเนื่องจากความร้อนสูงเกินไป
อันเป็นผลมาจากการทำงานร่วมกันของฟลักซ์แม่เหล็กหมุนกับกระแสที่เหนี่ยวนำโดยมันในตัวนำของขดลวดโรเตอร์ แรงที่เกิดขึ้นซึ่งกระทำต่อตัวนำเหล่านี้ในทิศทางสัมผัส ให้เราหาค่าของโมเมนต์ที่สร้างขึ้นโดยแรงเหล่านี้บนเพลาของเครื่องจักร
พลังงานแม่เหล็กไฟฟ้าที่ส่งไปยังโรเตอร์โดยสนามแม่เหล็กหมุนจะเท่ากับ:
ที่ M เอ่อ - โมเมนต์แม่เหล็กไฟฟ้าทำหน้าที่เกี่ยวกับโรเตอร์
ตามวงจรสมมูลของเฟสเดียวของเครื่อง:
จากนิพจน์เหล่านี้ เราพบว่า:
รับกระแสโรเตอร์ปัจจุบัน EMF ปฏิกิริยาอุปนัยเราได้รับ:
เราแนะนำโมเมนต์ความเสียดทานที่คงที่และละเลย เราเป็นตัวแทนของนิพจน์สำหรับช่วงเวลาบนก้านในรูปแบบ:
ถ้าฟลักซ์แม่เหล็ก Ф แสดงเป็นเวเบอร์ กระแส I 2 - ในหน่วยแอมแปร์ แรงบิดจะเป็นนิวตันเมตร (Nm)
แรงบิดของเครื่องขึ้นอยู่กับโหลด f, I 2 และ แต่สามารถแสดงเป็นฟังก์ชันของตัวแปรเดียวได้ เนื่องจากเป็นตัวแปรสำหรับมอเตอร์เหนี่ยวนำ จึงสะดวกที่สุดในการเลือกสลิป ส.
ตามสูตรที่ศึกษาก่อนหน้านี้:
สมมติว่าความถี่เครือข่ายไม่เปลี่ยนแปลง เราแนะนำ
36. วิธีการควบคุมความเร็วของการหมุนนรกด้วยการลัดวงจร โรเตอร์
37.เริ่มต้นและควบคุมความเร็วของการหมุนของความดันโลหิตด้วย fr.
การควบคุมโดยการเปลี่ยนสลิปทำได้โดยการเปลี่ยนความต้านทาน R p ของตัวปรับอุณหภูมิในวงจรโรเตอร์
การนำลิโน่เข้าสู่วงจรโรเตอร์จะเปลี่ยนการพึ่งพาแรงบิด M บนสลิป s โดยไม่ส่งผลต่อขนาดของแรงบิดสูงสุด สามลักษณะ M(s): ลักษณะธรรมชาติ (ไม่ใช่รีโอสแตต) 1 สอดคล้องกับขดลวดโรเตอร์ลัดวงจร (ความต้านทานรีโอสแตต = 0) ลักษณะรีโอสแตติก (เทียม) 2 และ 3 สอดคล้องกับขั้นตอนที่หนึ่งและสองของลิโน่ที่แนะนำ
การนำลิโน่เข้าสู่วงจรโรเตอร์มีผลดีต่อกระแสเริ่มต้น โดยลดลงประมาณ 2 เท่าเมื่อเทียบกับ IM ที่ลัดวงจร
ข้อเสียของวิธีนี้: 1) ประสิทธิภาพต่ำเนื่องจากการสูญเสียในลิโน่ R p ; 2) ลดความแข็งแกร่งของลักษณะทางกล 3) ปรับความเร็วลงได้เท่านั้น
การสตาร์ทมอเตอร์แบบอะซิงโครนัสด้วยเฟสโรเตอร์การสตาร์ทมอเตอร์แบบอะซิงโครนัสแตกต่างอย่างมากจากสภาวะการทำงานปกติ แรงบิดของมอเตอร์เมื่อสตาร์ทต้องเกินแรงบิดต้านทานโหลด แรงบิดเริ่มต้นมีบทบาท ลักษณะการเริ่มต้นที่สำคัญประการที่สองคือกระแสเริ่มต้น อัตราส่วนกระแสเริ่มต้นสำหรับมอเตอร์ด้วย โรเตอร์กรงกระรอกถึง 5-7 ซึ่งอาจไม่เป็นที่ยอมรับสำหรับมอเตอร์หรือสำหรับเครือข่าย และอาจสร้างความแตกต่างในความนุ่มนวลของการสตาร์ท การสตาร์ทมอเตอร์ด้วยโรเตอร์แบบเฟสจะดำเนินการผ่านรีโอสแตตแบบ 3 เฟส ซึ่งแต่ละเฟสจะเชื่อมต่อผ่านแปรงและวงแหวนไปยังเฟสหนึ่งของโรเตอร์ เมื่อเริ่มต้นการสตาร์ท รีโอสแตตจะถูกใส่เข้าไปจนสุด เมื่อสตาร์ทเครื่องแล้ว จะถูกลบออก และโรเตอร์ทั้งสามเฟสจะลัดวงจร จำนวนขั้นตอนของตัวปรับอุณหภูมิมีมากกว่าสองขั้นตอน และกระบวนการเปลี่ยนเมื่อเริ่มต้นทำงานมักจะเป็นไปโดยอัตโนมัติ การแนะนำความต้านทานแบบแอคทีฟในวงจรโรเตอร์เฟสจะเพิ่มแรงบิดและทำให้การสตาร์ทราบรื่นและจำกัดกระแสเริ่มต้น วิธีการเริ่มต้นนี้มีข้อดีหลายประการ แต่ใช้ได้กับมอเตอร์ที่มีเฟสโรเตอร์เท่านั้น
39.40. อุปกรณ์หลักการทำงานของเครื่องยนต์ กระแสตรง. วิธีการกระตุ้น EMF ของขดลวดกระดองและแรงบิดแม่เหล็กไฟฟ้า การออกแบบและหลักการทำงานของมอเตอร์กระแสตรง มอเตอร์กระแสตรงประกอบด้วยชิ้นส่วนคงที่ - สเตเตอร์และส่วนที่หมุนได้ - กระดองที่คั่นด้วยช่องว่างอากาศ เสาเพิ่มเติมหลักติดอยู่กับพื้นผิวด้านในของสเตเตอร์ เสาหลักที่มีขดลวดกระตุ้นสร้างฟลักซ์แม่เหล็กหลัก F ในเครื่อง และเสาเพิ่มเติมเพื่อลดการเกิดประกายไฟ
เกราะประกอบด้วยเพลา, แกน, ขดลวดและตัวสะสม ตัวสะสมประกอบด้วยแผ่นทองแดงที่แยกจากกันซึ่งเชื่อมต่อกับส่วนของขดลวดกระดอง พู่กันแบบตายตัวถูกทับบนตัวสะสม เชื่อมต่อขดลวดกระดองกับวงจรไฟฟ้าภายนอก อันเป็นผลมาจากการทำงานร่วมกันของกระแสเกราะ Iya และฟลักซ์แม่เหล็ก Ф แรงบิดถูกสร้างขึ้น M = CmFIa โดยที่ Cm คือค่าคงที่โมเมนต์ซึ่งขึ้นอยู่กับข้อมูลการออกแบบของเครื่อง แรงบิด M ของเครื่องยนต์สมดุลโดยโมเมนต์ความต้านทาน Ms ของเครื่องจักรที่ทำงาน เมื่อกระดองหมุนด้วยความถี่ n ขดลวดของมันจะข้ามฟลักซ์แม่เหล็ก Ф และตามกฎของการเหนี่ยวนำแม่เหล็กไฟฟ้า ตัวนับ EMF จะถูกเหนี่ยวนำ E \u003d CeFp โดยที่ Ce เป็นค่าคงที่เชิงสร้างสรรค์
แรงดันไฟฟ้าที่อาร์มาเจอร์ ezhimax U เท่ากับผลรวมของ EMF และแรงดันตกคร่อมความต้านทานของวงจรสมอ U=E +RyaIya=CeFn ดังนั้นกระแสของกระดอง Ia=(U-CeFn)/Rya และ ความเร็ว n=(U-RyaIya)/CeF/
เครื่องกำเนิดไฟฟ้ากระแสตรงขึ้นอยู่กับวิธีการจัดหาขดลวดกระตุ้น:
| เอบีซีดี) |
ข้าว. 50. การกระตุ้นของเครื่องกำเนิดไฟฟ้า: a - อิสระ, b - ขนาน, c - อนุกรม, d - ผสม
ที่ ปลุกเร้าอิสระ OB ขับเคลื่อนโดยแหล่งภายนอก ใช้ในกรณีที่จำเป็นต้องควบคุมกระแสกระตุ้น I และแรงดันไฟฟ้า U ที่แคลมป์ของเครื่องในช่วงกว้าง กระแสกระดองเท่ากับกระแสโหลด ผม ผม \u003d ผม n (รูปที่ 50, a)
เครื่องกำเนิดไฟฟ้าที่ตื่นเต้นในตัวเองมี OB ที่ขับเคลื่อนโดยตัวสร้างเอง
เมื่อเปิด OB ขนานกับขดลวดกระดอง เรามีเครื่องกำเนิดไฟฟ้าด้วย การกระตุ้นแบบขนาน(รูปที่ 50, b) ซึ่ง ฉัน ฉัน \u003d ฉัน n + ฉัน ค. สำหรับเครื่องจักรที่ทรงพลังของการทำงานปกติ I มักจะอยู่ที่ 1-3% และสำหรับเครื่องจักรขนาดเล็ก - มากถึงหลายสิบ% ของกระแสเกราะ ที่เครื่องกำเนิดไฟฟ้าด้วย การกระตุ้นตามลำดับ(รูปที่ 50, c) ORP เชื่อมต่อแบบอนุกรมกับสมอ นั่นคือ
ฉัน ฉัน \u003d ฉัน n \u003d ฉันค
เครื่องกำเนิดไฟฟ้าที่มีการกระตุ้นแบบผสมมีขดลวดกระตุ้นสองเส้น OB เชื่อมต่อแบบขนานกับกระดองและ ORP อื่นอยู่ในอนุกรม (รูปที่ 50, d) ตัวหลักมักจะเป็น OB ORP ดึงดูดเครื่องด้วยกระแสโหลดที่เพิ่มขึ้น ซึ่งชดเชยแรงดันตก U ในขดลวดกระดองและผลการล้างอำนาจแม่เหล็กของปฏิกิริยากระดอง
แรงดันไฟฟ้า U 1 ที่ใช้กับเฟสของขดลวดสเตเตอร์นั้นสมดุลโดย EMF E 1 หลัก EMF การรั่วไหลและแรงดันตกคร่อมความต้านทานที่ใช้งานของขดลวดสเตเตอร์:
ในการหมุนของโรเตอร์ สมการที่คล้ายกันจะมีลักษณะดังนี้:
แต่เนื่องจากปิดโรเตอร์โรเตอร์ แรงดันไฟฟ้า U 2 \u003d 0 และถ้าเราพิจารณาด้วยว่า E 2s \u003d SE 2 และ x 2s \u003d Sx 2 สมการสามารถเขียนใหม่เป็น:
![]()
สมการของกระแสของมอเตอร์เหนี่ยวนำจะทำซ้ำสมการที่คล้ายกันสำหรับหม้อแปลง:
28 แรงบิดมอเตอร์แบบอะซิงโครนัส
แรงบิดในมอเตอร์เหนี่ยวนำถูกสร้างขึ้นโดยปฏิสัมพันธ์ของกระแสโรเตอร์กับสนามแม่เหล็กของเครื่อง แรงบิดสามารถแสดงทางคณิตศาสตร์ในแง่ของกำลังแม่เหล็กไฟฟ้าของเครื่อง:
ที่ไหน w 1 =2pn 1 /60 - ความถี่เชิงมุมของการหมุนของสนาม ในทางกลับกัน น 1 =f 1 60/รูเปีย, แล้ว
![]()
แทนในสูตร เอ็ม 1 การแสดงออก Rเอม=Pe2/สและหารด้วย 9.81 เราจะได้:
![]()
สมการแรงบิดของมอเตอร์เหนี่ยวนำ
ตามมาด้วยว่าแรงบิดของมอเตอร์นั้นแปรผันตามการสูญเสียทางไฟฟ้าในโรเตอร์ แทนที่ค่าปัจจุบันในสูตรสุดท้าย ฉัน 2 ’ :
เราได้รับสมการแรงบิดของมอเตอร์เหนี่ยวนำ:
ที่ไหน ยู 1 - แรงดันเฟสของขดลวดสเตเตอร์
29 .ลักษณะทางกลของมอเตอร์เรียกว่าการพึ่งพาความเร็วของโรเตอร์กับแรงบิดบนเพลา n = f (M2) เนื่องจากแรงบิดรอบเดินเบามีขนาดเล็กภายใต้ภาระ ดังนั้น M2 ≈ M และ ลักษณะทางกลแสดงโดยการพึ่งพา n = f (M) หากเราคำนึงถึงความสัมพันธ์ s = (n1 - n) / n1 จากนั้นคุณสมบัติทางกลสามารถรับได้โดยการนำเสนอการพึ่งพาแบบกราฟิกในพิกัด n และ M (รูปที่ 1)
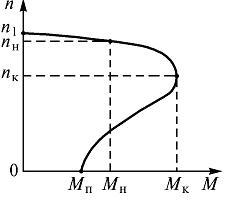
ข้าว. 1. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
ลักษณะทางกลตามธรรมชาติของมอเตอร์เหนี่ยวนำสอดคล้องกับวงจรหลัก (หนังสือเดินทาง) ของการรวมและพารามิเตอร์เล็กน้อยของแรงดันไฟฟ้า ลักษณะประดิษฐ์จะได้รับหากมีองค์ประกอบเพิ่มเติม: ตัวต้านทาน, เครื่องปฏิกรณ์, ตัวเก็บประจุ เมื่อมอเตอร์ได้รับแรงดันไฟฟ้าที่ไม่มีพิกัด คุณลักษณะจะแตกต่างจากลักษณะทางกลตามธรรมชาติ
ลักษณะทางกลมีความสะดวกมากและ เครื่องมือที่มีประโยชน์ในการวิเคราะห์โหมดสถิตและไดนามิกของไดรฟ์ไฟฟ้า
30 ลักษณะทางกลและการควบคุมตนเองของมอเตอร์. กราฟที่เชื่อมโยงปริมาณทางกล - ความเร็วและแรงบิด - เรียกว่าลักษณะทางกลของมอเตอร์เหนี่ยวนำ (รูปที่ 7) n = ƒ (M) การควบคุมตนเองของมอเตอร์แบบอะซิงโครนัสมีดังนี้ ให้เครื่องยนต์ทำงานอย่างมั่นคงในบางโหมด พัฒนาความเร็ว n1 และแรงบิด M1 ด้วยการหมุนที่สม่ำเสมอ โมเมนต์นี้จึงเท่ากับแรงบิดเบรก M t1, เช่น. M1=M t 1, n1= คอนเซ็ท การเพิ่มแรงบิดในการเบรกเป็น M2 จะทำให้ความเร็วของเครื่องจักรลดลง เนื่องจากแรงบิดในการเบรกจะมากกว่าแรงบิด ด้วยความเร็วที่ลดลง สลิปจะเพิ่มขึ้น ซึ่งจะทำให้ EMF และกระแสไฟในโรเตอร์เพิ่มขึ้น สิ่งนี้จะเพิ่มแรงบิดของเครื่องยนต์ กระบวนการนี้สิ้นสุดลงเมื่อแรงบิด M2 ที่พัฒนาโดยเครื่องยนต์มีค่าเท่ากับ M t 2. ในกรณีนี้ ความเร็วในการหมุนจะถูกตั้งไว้ต่ำกว่า n1 คุณสมบัติของสมดุลอัตโนมัติระหว่างการเบรกและแรงบิดเรียกว่า การควบคุมตนเอง.
บนแท่นวางในห้องปฏิบัติการ เครื่องยนต์มีเบรกไฟฟ้า ซึ่งประกอบด้วยแม่เหล็กไฟฟ้า ซึ่งอยู่ในช่องว่างที่แผ่นดิสก์หมุน วางอยู่บนเพลาเครื่องยนต์ ด้วยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับขดลวดแม่เหล็กไฟฟ้าด้วยที่จับของตัวเปลี่ยนรูปแบบอัตโนมัติ สามารถเปลี่ยนแรงเบรกได้ ซึ่งช่วงเวลาดังกล่าวคือ: M TORM \u003d F r (N m)
โดยที่ F คือแรง (แรง) ที่กระทำต่อเส้นรอบวงของรอก (N);
r - รัศมีรอกเท่ากับ 0.18 ม. พลังที่มีประโยชน์บนเพลามอเตอร์:
ที่ไหน น- ความเร็วรอบเครื่องยนต์ rpm.
โดยที่ƒ - ความถี่เครือข่าย (เท่ากับ 50 Hz)
R- จำนวนเสาคู่ของขดลวดสเตเตอร์ (เท่ากับ 2)
n 1 - ความเร็วซิงโครนัสของการหมุน สนามแม่เหล็ก.
ความเร็วของเครื่องยนต์ถูกกำหนดโดยใช้เครื่องวัดวามเร็ว สลิปคำนวณโดยสูตร:
31 ลักษณะการทำงานเรียกว่า การพึ่งพาพลังงาน, ถูกใช้โดยมอเตอร์, กระแสไฟฟ้าที่ใช้ไป I, ตัวประกอบกำลัง, ความเร็วของมอเตอร์, ประสิทธิภาพและแรงบิด M จากกำลังที่มีประโยชน์ของมอเตอร์ที่มอบให้กับเพลา ลักษณะการทำงานเป็นตัวกำหนดคุณสมบัติการทำงานพื้นฐานของมอเตอร์เหนี่ยวนำ ลักษณะการทำงานของมอเตอร์เหนี่ยวนำกำลังปานกลางแสดงในรูปที่ 8.8. พฤติกรรมของพวกเขาอธิบายได้ดังนี้ ที่โหลดเบา กระแสมอเตอร์ I (กระแสไม่มีโหลด) สามารถอยู่ระหว่าง 20% ถึง 70% ของกระแสไฟที่กำหนด เมื่อโหลดเพิ่มขึ้น กระแสในวงจรโรเตอร์จะเพิ่มขึ้น ซึ่งทำให้กระแสเพิ่มขึ้นเกือบตามสัดส่วน ฉันในวงจรสเตเตอร์

รูปที่ 8.8 แรงบิดของมอเตอร์ () เกือบจะเป็นสัดส่วนกับโหลดเช่นกัน แต่ที่โหลดสูง ความเป็นเส้นตรงของกราฟจะถูกรบกวนบ้างโดยการลดความเร็วของเครื่องยนต์ ลักษณะการทำงานเป็นการแสดงออกถึงความสัมพันธ์ระหว่างกำลังที่พัฒนาโดยมอเตอร์และการเลื่อนเฟสระหว่างกระแสสเตเตอร์และแรงดันไฟ มอเตอร์แบบอะซิงโครนัสเช่นหม้อแปลงไฟฟ้าใช้กระแส I จากเครือข่ายซึ่งอยู่นอกเฟสอย่างมีนัยสำคัญเมื่อใช้แรงดันไฟฟ้า ตัวอย่างเช่น ในโหมดปกติ ด้วยการเพิ่มภาระบนเพลามอเตอร์ ส่วนประกอบที่ทำงานอยู่ของกระแสโรเตอร์และสเตเตอร์จะเพิ่มขึ้น . ถึงค่าสูงสุดที่ .
เพิ่มขึ้นอีก มูลค่าจะลดลงบ้าง เนื่องจากการเพิ่มขึ้นของสลิป s ซึ่งทำให้เกิดการเพิ่มขึ้นของค่ารีแอกแตนซ์ของขดลวดโรเตอร์ และด้วยเหตุนี้ การเปลี่ยนเฟส . จากเพิ่มขึ้นและเพิ่มขึ้น กล่าวคือ จะลดลง
พฤติกรรม ลักษณะการทำงานอธิบายได้ดังนี้ ค่าของประสิทธิภาพถูกกำหนดโดยอัตราส่วนของพลังงานที่มีประโยชน์ต่อพลังงานที่ใช้จากเครือข่าย
ค่านี้เรียกว่าการสูญเสียพลังงาน นอกเหนือจากการสูญเสียในเหล็กของสเตเตอร์และโรเตอร์เนื่องจากการพลิกกลับของสนามแม่เหล็กและกระแสน้ำวนซึ่งเมื่อรวมกับการสูญเสียทางกลถือได้ว่าคงที่แล้วยังมีการสูญเสียทองแดงในมอเตอร์แบบอะซิงโครนัส ,
เหล่านั้น. ในขดลวดสเตเตอร์และโรเตอร์ ซึ่งแปรผันตามกำลังสองของกระแสที่ไหลดังนั้นจึงขึ้นอยู่กับโหลด ในระหว่างรอบเดินเบา เช่นเดียวกับในหม้อแปลงไฟฟ้า การสูญเสียในเหล็กมีมากกว่า และเท่ากับกระแสที่ไม่มีโหลดซึ่งมีน้อย ด้วยโหลดขนาดเล็กบนเพลา การสูญเสียทองแดงยังคงน้อย ดังนั้นประสิทธิภาพที่กำหนดโดยสูตร ![]() (8.5)
(8.5)
เพิ่มขึ้นอย่างรวดเร็วในตอนแรก เมื่อการสูญเสียคงที่เท่ากับการสูญเสียที่ขึ้นอยู่กับภาระ , ประสิทธิภาพ ถึงมูลค่าสูงสุด เมื่อโหลดเพิ่มขึ้นอีก การสูญเสียพลังงานผันแปรจะเพิ่มขึ้นอย่างมากอันเป็นผลมาจากประสิทธิภาพ ลดลงอย่างเห็นได้ชัด ลักษณะของการเสพติด ) สามารถอธิบายได้จากความสัมพันธ์ . ถ้าประสิทธิภาพ เป็นค่าคงที่ จากนั้นจะมีความสัมพันธ์เชิงเส้นตรงระหว่าง และ แต่เนื่องจากประสิทธิภาพ ขึ้นอยู่กับและการพึ่งพานี้ในขั้นต้นจะเพิ่มขึ้นอย่างรวดเร็วและเมื่อโหลดเพิ่มขึ้นอีกเล็กน้อยจะเปลี่ยนไปเล็กน้อยเส้นโค้ง ) ครั้งแรกเพิ่มขึ้นอย่างช้า ๆ แล้วเพิ่มขึ้นอย่างรวดเร็ว
32 เมื่อใดก็ได้ วงจรไฟฟ้าผลรวมของกำลังของแหล่งพลังงานไฟฟ้าทั้งหมดจะต้องเท่ากับผลรวมของกำลังของตัวรับและส่วนประกอบเสริมทั้งหมด เมื่อได้รับนิพจน์กำลังแล้วจึงเป็นไปได้ที่จะเขียนสมการสมดุลกำลังไฟฟ้าสำหรับวงจรไฟฟ้าใด ๆ ในรูปแบบทั่วไป:
Σ อี → ฉัน → + Σ ยู ← ฉัน → = Σ อี ← ฉัน → + Σ ยู → ฉัน → + Σ ฉัน 2 ร.
สมการ (1.35) สามารถเขียนได้ทั้งสำหรับทิศทาง EMF แรงดันและกระแสจริง และสำหรับกรณีที่บางทิศทางถูกเลือกโดยพลการ ในกรณีแรกเงื่อนไขทั้งหมดจะเป็นค่าบวกและองค์ประกอบที่สอดคล้องกันของวงจรจะเป็นแหล่งหรือตัวรับพลังงานไฟฟ้า ในทางกลับกัน หากคำศัพท์บางคำถูกเขียนขึ้นโดยคำนึงถึงทิศทางเชิงบวกที่เลือกโดยพลการ องค์ประกอบที่เกี่ยวข้องจะต้องถูกพิจารณาว่าเป็นแหล่งที่มาและผู้รับที่ตั้งใจไว้ จากการคำนวณหรือการวิเคราะห์ บางส่วนอาจกลายเป็นค่าลบ นี่จะหมายความว่าแหล่งที่คาดว่าจะเป็นอ่างล้างมือ และอ่างล้างมือที่คาดว่าเป็นแหล่ง
33 การสตาร์ทมอเตอร์แบบอะซิงโครนัสมาพร้อมกับกระบวนการชั่วคราวของเครื่องที่เกี่ยวข้องกับการเปลี่ยนแปลงของโรเตอร์จากสถานะพักไปเป็นสถานะการหมุนที่สม่ำเสมอ ซึ่งแรงบิดของเครื่องยนต์จะปรับสมดุลโมเมนต์ของแรงต้านทานบนเพลาเครื่อง เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสจะมีการใช้พลังงานไฟฟ้าเพิ่มขึ้นจากเครือข่ายการจ่ายไฟฟ้า ซึ่งไม่เพียงแต่ใช้ไปในการเอาชนะแรงบิดเบรกที่ใช้กับเพลาและครอบคลุมการสูญเสียในมอเตอร์แบบอะซิงโครนัสเท่านั้น แต่ยังรวมถึงการสื่อสารพลังงานจลน์บางอย่างด้วย ไปยังชิ้นส่วนที่เคลื่อนไหวของหน่วยการผลิต ดังนั้นเมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสจะต้องพัฒนาแรงบิดที่เพิ่มขึ้น สำหรับ มอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์แรงบิดเริ่มต้นเริ่มต้นซึ่งสอดคล้องกับสลิป sp = 1 ขึ้นอยู่กับความต้านทานเชิงแอ็คทีฟของตัวต้านทานแบบปรับได้ที่นำเข้าสู่วงจรโรเตอร์
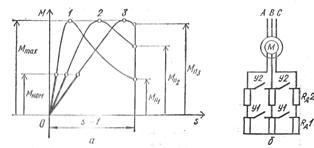
ข้าว. 1. การสตาร์ทมอเตอร์แบบอะซิงโครนัสสามเฟสด้วยโรเตอร์เฟส: a - กราฟของการพึ่งพาแรงบิดของมอเตอร์ด้วยเฟสโรเตอร์บนสลิปที่ความต้านทานเชิงแอคทีฟต่างๆ ของตัวต้านทานในวงจรโรเตอร์ b - ไดอะแกรมของการรวม ตัวต้านทานและหน้าสัมผัสปิดการเร่งความเร็วในวงจรโรเตอร์ ดังนั้นด้วยการเร่งความเร็วแบบปิดหน้าสัมผัส U1, U2 เช่น เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสที่มีวงแหวนหน้าสัมผัสลัดวงจรแรงบิดเริ่มต้นเริ่มต้น Mp1 = (0.5 -1.0) Mnom และกระแสเริ่มต้นเริ่มต้น Ip = (4.5 - 7) Inom และ มากกว่า. แรงบิดเริ่มต้นขนาดเล็ก มอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์โรเตอร์อาจไม่เพียงพอที่จะขับเคลื่อนหน่วยการผลิตแล้วเร่งความเร็ว และกระแสเริ่มต้นที่สำคัญจะทำให้ความร้อนเพิ่มขึ้น ขดลวดมอเตอร์ซึ่งจำกัดความถี่ของการเปิดเครื่อง และในเครือข่ายที่ใช้พลังงานต่ำจะทำให้แรงดันไฟฟ้าตกชั่วคราวซึ่งไม่พึงปรารถนาสำหรับการทำงานของเครื่องรับอื่นๆ สถานการณ์เหล่านี้อาจเป็นสาเหตุที่ไม่รวมการใช้มอเตอร์แบบอะซิงโครนัสกับโรเตอร์เฟสที่มีกระแสไฟเริ่มต้นขนาดใหญ่เพื่อขับเคลื่อนกลไกการทำงาน การแนะนำตัวต้านทานแบบปรับได้ซึ่งเรียกว่าตัวต้านทานเริ่มต้นในวงจรโรเตอร์ของมอเตอร์ไม่เพียง แต่ลดกระแสเริ่มต้นเริ่มต้น แต่ยังเพิ่มแรงบิดเริ่มต้นเริ่มต้นซึ่งสามารถเข้าถึงแรงบิดสูงสุด Mmax (รูปที่ 1, a, เส้นโค้ง 3 ) หากสลิปวิกฤตของมอเตอร์ที่มีเฟสโรเตอร์คือ sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1 โดยที่ Rd" คือความต้านทานเชิงแอ็คทีฟของตัวต้านทานที่อยู่ในเฟสของ ขดลวดโรเตอร์ของมอเตอร์ลดลงถึงเฟสของขดลวดสเตเตอร์ การเพิ่มขึ้นในความต้านทานเชิงรุกของตัวต้านทานเริ่มต้นนั้นไม่สามารถทำได้ เนื่องจากจะทำให้แรงบิดเริ่มต้นเริ่มต้นลดลงและจุดออกของแรงบิดสูงสุดในพื้นที่ลื่น s > 1 ซึ่งไม่รวมความเป็นไปได้ของการเร่งความเร็วของโรเตอร์ ความต้านทานเชิงรุกที่ต้องการของตัวต้านทานสำหรับการสตาร์ทมอเตอร์ด้วยเฟสโรเตอร์นั้นพิจารณาจากข้อกำหนดของการสตาร์ท ซึ่งสามารถทำได้ง่ายเมื่อ Mp = (0.1 - 0.4) Mnom ปกติถ้า Mp - (0.5 - 0.75) Mnom และหนักที่ Mp ≥ Mnom เพื่อรักษาแรงบิดขนาดใหญ่เพียงพอโดยมอเตอร์ที่มีเฟสโรเตอร์ในระหว่างการเร่งความเร็วของหน่วยการผลิต เพื่อลดระยะเวลาของกระบวนการชั่วคราวและลดความร้อนของมอเตอร์ จำเป็นต้องค่อยๆ ลดความต้านทานแอคทีฟของการสตาร์ท ตัวต้านทาน การเปลี่ยนแปลงแรงบิดที่อนุญาตในระหว่างการเร่งความเร็ว M(t) ถูกกำหนดโดยสภาวะทางไฟฟ้าและทางกลที่จำกัดแรงบิดสูงสุดจำกัด M > 0.85 Mmax แรงบิดในการสลับ M2 > > Ms (รูปที่ 2) เช่นเดียวกับการเร่งความเร็ว

ข้าว. 2. ลักษณะการเริ่มต้นของมอเตอร์แบบอะซิงโครนัสสามเฟสพร้อมโรเตอร์เฟส การสลับตัวต้านทานการสตาร์ทนั้นทำได้โดยการเปิดคอนแทคเตอร์เร่งความเร็ว Y1, Y2 ตามลำดับ ที่เวลา t1, t2 นับจากวินาทีที่เครื่องยนต์สตาร์ท เมื่อในระหว่างการเร่งความเร็ว แรงบิด M จะเท่ากับโมเมนต์สวิตชิ่ง M2 ด้วยเหตุนี้ ในระหว่างการสตาร์ทเครื่องทั้งหมด แรงบิดสูงสุดทั้งหมดจึงเท่ากัน และแรงบิดสวิตชิ่งทั้งหมดจะเท่ากัน เนื่องจากแรงบิดและกระแสของมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์มีความเกี่ยวข้องกัน จึงเป็นไปได้ที่จะตั้งค่าขีดจำกัดกระแสไฟสูงสุด I1 \u003d (1.5 - 2.5) Inom และกระแสสลับ I2 ในระหว่างการเร่งความเร็วของโรเตอร์ซึ่งควรให้ ช่วงเวลาเปลี่ยน M2\u003e Mc การตัดการเชื่อมต่อของมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์จากเครือข่ายการจ่ายไฟมักจะดำเนินการกับวงจรโรเตอร์ที่ลัดวงจร เพื่อหลีกเลี่ยงแรงดันไฟเกินในเฟสของขดลวดสเตเตอร์ ซึ่งอาจเกินแรงดันไฟฟ้าที่กำหนดของเฟสเหล่านี้ 3-4 เท่า หากวงจรโรเตอร์เปิดอยู่ในขณะที่ดับเครื่องยนต์
34 การควบคุมความถี่วิธีการควบคุมความเร็วนี้ช่วยให้สามารถใช้มอเตอร์แบบอะซิงโครนัสที่เชื่อถือได้และราคาถูกที่สุดกับโรเตอร์กรงกระรอก อย่างไรก็ตาม ในการเปลี่ยนความถี่ของแรงดันไฟ จำเป็นต้องใช้แหล่งกระแสความถี่แปรผัน ในขณะที่รุ่นหลังใช้เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสที่มีความเร็วตัวแปรหรือเครื่องแปลงความถี่ - ไฟฟ้าหรือแบบคงที่ซึ่งทำบนวาล์วเซมิคอนดักเตอร์ควบคุม (ไทริสเตอร์) ปัจจุบันเครื่องแปลงความถี่มีวงจรที่ค่อนข้างซับซ้อนและมีราคาค่อนข้างสูง อย่างไรก็ตาม การพัฒนาอย่างรวดเร็วของเทคโนโลยีเซมิคอนดักเตอร์กำลังช่วยให้เราหวังว่าจะมีการปรับปรุงตัวแปลงความถี่ต่อไป ซึ่งเปิดโอกาสให้ ประยุกต์กว้างการควบคุมความถี่ คำอธิบายโดยละเอียดของกฎหมายควบคุมสำหรับการควบคุมความถี่และการวิเคราะห์การทำงานของมอเตอร์แบบอะซิงโครนัสเมื่อขับเคลื่อนโดยตัวแปลงความถี่มีอยู่ใน § 4.13 และ 4.14 ระเบียบโดยการเปลี่ยนจำนวนเสากฎระเบียบนี้ช่วยให้คุณได้รับการเปลี่ยนแปลงความเร็ว ในรูป แสดง 4.35 วงจรที่ง่ายที่สุด(สำหรับเฟสเดียว) ซึ่งให้คุณเปลี่ยนจำนวนเสาของสเตเตอร์ที่คดเคี้ยวสองครั้ง เมื่อต้องการทำเช่นนี้ แต่ละเฟสของขดลวดสเตเตอร์จะแบ่งออกเป็นสองส่วน ซึ่งจะเปลี่ยนจากการเชื่อมต่อแบบอนุกรมเป็นแบบขนาน เห็นได้จากรูปว่า เมื่อเปิดขดลวด 1-2 และ 3-4 ในกิ่งขนานสองกิ่ง จำนวนขั้วจะลดลงครึ่งหนึ่ง ส่งผลให้ความถี่ของการหมุนของสนามแม่เหล็กเพิ่มขึ้นเป็นสองเท่าเมื่อทำการสลับ จำนวนรอบที่เชื่อมต่อแบบอนุกรมในแต่ละเฟสจะลดลงครึ่งหนึ่ง แต่เนื่องจากความเร็วในการหมุนเพิ่มขึ้นเป็นสองเท่า EMF ที่เหนี่ยวนำในเฟสยังคงไม่เปลี่ยนแปลง ดังนั้นมอเตอร์ที่ความเร็วทั้งสองสามารถเชื่อมต่อกับเครือข่ายด้วยแรงดันไฟฟ้าเดียวกันได้ เพื่อไม่ให้เปลี่ยนการหมุนของโรเตอร์ให้ทำหลัง ไฟฟ้าลัดวงจร. หากคุณต้องการความเร็วสามหรือสี่ระดับ ขดลวดอีกอันจะถูกวางบนสเตเตอร์ โดยการเปลี่ยนซึ่งคุณจะได้รับความถี่เพิ่มเติมสองความถี่ มอเตอร์เหนี่ยวนำที่เปลี่ยนขั้วเรียกว่า หลายความเร็ว. การควบคุมโดยการรวมลิโน่ไว้ในวงจรโรเตอร์. เมื่อรวมความต้านทานแบบแอคทีฟเพิ่มเติมไว้ในวงจรโรเตอร์ Rต่อ 1 , Rต่อ 2 , R add3 และอื่น ๆ เปลี่ยนรูปแบบของการพึ่งพา M = ฉและลักษณะทางกล น 2 = ฉ(M)เครื่องยนต์ (รูปที่ 4.37, a) ในขณะเดียวกันก็มีโมเมนต์โหลดบ้าง เอ็ม n ใบการแข่งขัน ส 1 , ส 2 , ส 3 , ..., ใหญ่กว่าสลิป ส e เมื่อเครื่องยนต์ทำงานในลักษณะที่เป็นธรรมชาติ (เมื่อ Rต่อ = 0) ดังนั้นความเร็วของเครื่องยนต์ในสภาวะคงที่จึงลดลงจาก น อีก่อน พี 1 พี 2 , พี่ 3 ,... (รูปที่ 4.37, ข). วิธีการควบคุมนี้ใช้ได้กับมอเตอร์สลิปแหวนเท่านั้น ช่วยให้คุณเปลี่ยนความเร็วได้อย่างราบรื่นในช่วงกว้าง ข้อเสียของมันคือ: ก) การสูญเสียพลังงานจำนวนมากในลิโน่ควบคุม; b) ลักษณะทางกล "อ่อน" มากเกินไปของเครื่องยนต์ที่มีความต้านทานสูงในวงจรโรเตอร์ ในบางกรณี สิ่งหลังไม่เป็นที่ยอมรับ เนื่องจากการเปลี่ยนแปลงเล็กน้อยในแรงบิดโหลดสอดคล้องกับการเปลี่ยนแปลงที่สำคัญของความเร็ว
35 เครื่องกำเนิดแบบอะซิงโครนัส- นี่คือเครื่องจักรไฟฟ้าแบบอะซิงโครนัส (เครื่องยนต์เอล) ที่ทำงานในโหมดเครื่องกำเนิดไฟฟ้า ด้วยความช่วยเหลือของมอเตอร์ขับเคลื่อน (ในกรณีของเราคือกังหันลม) โรเตอร์ของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสจะหมุนไปในทิศทางเดียวกับสนามแม่เหล็ก ในกรณีนี้การลื่นของโรเตอร์จะกลายเป็นค่าลบ แรงบิดในการเบรกจะปรากฏขึ้นบนเพลาของเครื่องอะซิงโครนัส และเครื่องกำเนิดไฟฟ้าจะถ่ายเทพลังงานไปยังเครือข่าย เพื่อความตื่นตัว แรงเคลื่อนไฟฟ้าวงจรเอาท์พุตใช้การสะกดจิตที่เหลือของโรเตอร์ สำหรับสิ่งนี้จะใช้ตัวเก็บประจุ เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสไม่ไวต่อการลัดวงจร ตัวสร้างแบบอะซิงโครนัสง่ายกว่าตัวสร้างแบบซิงโครนัส (ตัวอย่างเช่น เครื่องกำเนิดไฟฟ้ารถยนต์): หากตัวเหนี่ยวนำวางอยู่บนโรเตอร์ โรเตอร์ของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสจะดูเหมือนมู่เล่ทั่วไป เครื่องกำเนิดไฟฟ้าดังกล่าวได้รับการปกป้องจากสิ่งสกปรกและความชื้นได้ดีกว่าทนต่อ ไฟฟ้าลัดวงจรและโอเวอร์โหลดและแรงดันเอาต์พุตของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสมีระดับความผิดเพี้ยนที่ไม่ใช่เชิงเส้นต่ำกว่า วิธีนี้ช่วยให้คุณใช้เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสไม่เพียงแต่ให้พลังงานแก่อุปกรณ์อุตสาหกรรมที่ไม่สำคัญต่อรูปร่างของแรงดันไฟฟ้าขาเข้าเท่านั้น แต่ยังเชื่อมต่อกับอุปกรณ์อิเล็กทรอนิกส์ด้วย เป็นเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสที่เป็นแหล่งกระแสในอุดมคติสำหรับอุปกรณ์ที่มีโหลดแบบแอคทีฟ (โอห์มมิก): เครื่องทำความร้อนไฟฟ้า เครื่องแปลงการเชื่อม หลอดไส้, อุปกรณ์อิเล็กทรอนิกส์, วิศวกรรมคอมพิวเตอร์และวิทยุ ประโยชน์ของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัส. ข้อดีเหล่านี้รวมถึงปัจจัยที่ชัดเจนต่ำ (ค่าสัมประสิทธิ์ฮาร์มอนิก) ซึ่งแสดงลักษณะการมีอยู่เชิงปริมาณของฮาร์โมนิกที่สูงขึ้นในแรงดันเอาต์พุตของเครื่องกำเนิดไฟฟ้า ฮาร์โมนิกที่สูงขึ้นทำให้เกิดการหมุนที่ไม่สม่ำเสมอและทำให้มอเตอร์ไฟฟ้าร้อนขึ้นโดยเปล่าประโยชน์ เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสสามารถมีปัจจัยที่ชัดเจนได้ถึง 15% และปัจจัยที่ชัดเจนของเครื่องกำเนิดแบบอะซิงโครนัสไม่เกิน 2% ดังนั้นเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสจึงผลิตพลังงานที่มีประโยชน์ในทางปฏิบัติเท่านั้น ข้อดีอีกประการของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสคือไม่มีขดลวดหมุนและชิ้นส่วนอิเล็กทรอนิกส์ที่ไวต่ออิทธิพลภายนอกและมักจะเกิดความเสียหายได้ง่าย นั่นเป็นเหตุผลที่ เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสสึกหรอน้อยและสามารถให้บริการเป็นเวลานานมาก เอาต์พุตของเครื่องกำเนิดไฟฟ้าของเราคือ 220/380V AC ทันที ซึ่งสามารถใช้โดยตรงกับเครื่องใช้ในครัวเรือน (เช่น เครื่องทำความร้อน) เพื่อชาร์จแบตเตอรี่ เชื่อมต่อกับโรงเลื่อย และสำหรับการทำงานแบบขนานกับเครือข่ายแบบเดิม ในกรณีนี้ คุณจะต้องจ่ายส่วนต่างที่ใช้ไปจากเครือข่ายและสร้างโดยกังหันลม เพราะ เนื่องจากแรงดันไฟฟ้ามาถึงพารามิเตอร์ทางอุตสาหกรรมทันที คุณจึงไม่จำเป็นต้องใช้ตัวแปลงต่างๆ (อินเวอร์เตอร์) เมื่อเครื่องกำเนิดลมเชื่อมต่อโดยตรงกับโหลดของคุณ ตัวอย่างเช่น คุณสามารถเชื่อมต่อโดยตรงกับโรงเลื่อย และทำงานราวกับว่าคุณเชื่อมต่อกับเครือข่าย 380V ในที่ที่มีลมแรง ดังที่คุณทราบ เพื่อลดเวลาเบรกเมื่อหยุดเครื่องจักรและกลไกการผลิต มักใช้เบรกแบบกลไก การลดเวลาเบรก โดยเฉพาะอย่างยิ่งในกรณีของรอบการทำงานสั้น ส่งผลให้ผลิตภาพของเครื่องจักรและกลไกเพิ่มขึ้นอย่างมาก ข้อเสียของเบรกแบบกลไกคือการสึกหรออย่างรวดเร็วของพื้นผิวการถู ความซับซ้อนและความจำเป็นในการปรับแรงเบรกเป็นระยะ ความต้องการพื้นที่เพิ่มเติมสำหรับการวางเบรกและการเชื่อมต่อกับกลไก ข้อเสียทั้งหมดข้างต้นจะหมดไป หากตามวัตถุประสงค์ที่ระบุไว้ แทนที่จะใช้เบรกแบบกลไก คุณสมบัติของมอเตอร์ไฟฟ้าถูกใช้ในการทำงานในโหมดเบรก กล่าวคือ เพื่อทำงานเป็นหลักในฐานะเครื่องกำเนิดไฟฟ้า และพัฒนาไม่ใช่แรงบิด แต่เป็น แรงบิดเบรก ในเครื่องจักรสำหรับยกและขนย้ายจำนวนมาก (เครน ลิฟต์ บันไดเลื่อน ฯลฯ) ที่ซึ่งการเคลื่อนไหวภายใต้อิทธิพลของแรงโน้มถ่วงเป็นไปได้ อัตราการโหลดที่ลดลงอย่างต่อเนื่องและสม่ำเสมอจะรับประกันได้โดยใช้แรงบิดเบรกของมอเตอร์ไฟฟ้า มอเตอร์กระแสตรงสามารถทำงานในโหมดเบรกสามโหมด:
ในโหมดฝ่ายค้าน;
ในโหมดเครื่องกำเนิดไฟฟ้าที่มีการส่งออกพลังงานไปยังเครือข่าย
อยู่ในโหมด เบรกแบบไดนามิก.
ในโหมดการเบรกใดๆ มอเตอร์ไฟฟ้าทำงานเป็นเครื่องกำเนิดไฟฟ้า แปลง ตัวอย่างเช่น พลังงานจลน์ของชิ้นส่วนที่เคลื่อนไหว หรือพลังงานศักย์ของโหลดจากมากไปหาน้อยเป็นพลังงานไฟฟ้า
36 เมื่อเครื่องยนต์ถอยหลังขณะเคลื่อนที่โดยเปลี่ยนสวิตช์ การเบรกจะเกิดขึ้นจากความเร็วที่กำหนดเป็นศูนย์ก่อน จากนั้นจึงเร่งความเร็วในอีกทางหนึ่ง การเบรกดังกล่าวยังสามารถใช้เบรกในช่วงที่เรียกว่า ฝ่ายค้าน. ในระหว่างการพลิกกลับหรือการเบรก มอเตอร์เหนี่ยวนำแบบกรงกระรอกจะมีกระแสที่สำคัญ ดังนั้น ตามสภาพความร้อนของเครื่องยนต์เหล่านี้ จำนวนการพลิกกลับต่อชั่วโมงไม่เกินสิบ เพื่อจำกัดกระแสและเพิ่มแรงบิด ความต้านทานจะถูกนำเข้าสู่วงจรเฟสโรเตอร์ของมอเตอร์แบบอะซิงโครนัส ลองพิจารณาสามวิธีหลักในการเบรกด้วยไฟฟ้าของมอเตอร์แบบอะซิงโครนัส เบรกโดยการต่อต้าน ตามที่ระบุไว้ จะดำเนินการเมื่อสตาร์ทเครื่องยนต์ขณะเดินทาง ในกรณีนี้ สนามแม่เหล็กจะหมุนไปในทิศทางตรงกันข้ามที่สัมพันธ์กับทิศทางการหมุนของมอเตอร์ และแรงบิดของมอเตอร์ก็เบรก - มันขัดกับทิศทางของการหมุน เบรกเครื่องกำเนิดไฟฟ้า เกิดขึ้นเมื่อเปลี่ยนเครื่องยนต์หลายความเร็วขณะเคลื่อนที่จากความเร็วที่สูงขึ้นไปเป็นความเร็วที่ต่ำลงเช่น เมื่อเปลี่ยนเครื่องจากเสาจำนวนน้อยเป็นเสาที่ใหญ่ขึ้น ในช่วงเวลาแรกของการเปลี่ยนความเร็วของเครื่องยนต์จะสูงกว่าความเร็วของสนามมาก กล่าวคือ สลิปกลายเป็นลบและเครื่องจะสลับไปที่โหมดเครื่องกำเนิดไฟฟ้า การเบรกเกิดขึ้นพร้อมกับการเปลี่ยนแปลงของพลังงานจลน์ของชิ้นส่วนที่หมุนเป็น พลังงานไฟฟ้าซึ่งลบการสูญเสียในเครื่องให้กับเครือข่าย การเบรกของเครื่องกำเนิดไฟฟ้าสามารถอยู่ในลิฟต์ยกได้เมื่อลดภาระหนักลง เร่งเครื่องยนต์ให้มีความเร็วเกินซิงโครนัส จากนั้นเครื่องจะเริ่มส่งพลังงานให้กับเครือข่ายโดยโหลดจากมากไปน้อย การเบรกของเครื่องกำเนิดไฟฟ้าสามารถทำได้ที่ความเร็วโอเวอร์ซิงโครนัสเท่านั้น หากต้องดับเครื่องยนต์เมื่อสิ้นสุดการเบรก เมื่อสิ้นสุดการเบรก เราควรเปลี่ยนไปใช้การเบรกแบบกลไกหรือการเบรกด้วยไฟฟ้าประเภทอื่น (ไดนามิก การสลับสับเปลี่ยน) หากจำเป็น การยึดตำแหน่งในตอนท้ายทำได้โดยใช้เบรกแบบกลไกเท่านั้น ที่ เบรกแบบไดนามิก ขดลวดสเตเตอร์ของมอเตอร์ถูกตัดการเชื่อมต่อจาก เครือข่ายสามเฟสและรวมอยู่ในเครือข่ายกระแสสลับโดยตรงหรือเฟสเดียว ในกรณีนี้สามารถเชื่อมต่อเฟสของขดลวดสเตเตอร์ได้หลายวิธี ขดลวดสเตเตอร์ซึ่งขับเคลื่อนโดยกระแสตรงจะสร้างสนามแม่เหล็กที่อยู่กับที่ เช่นเดียวกับระหว่างการทำงานปกติของเครื่องยนต์ สนามการหมุนของมันจะลากโรเตอร์ไปพร้อมกับมัน สนามหยุดนิ่งระหว่างการเบรกแบบไดนามิกทำให้โรเตอร์หยุดอย่างรวดเร็ว พลังงานจลน์ชิ้นส่วนที่หมุนได้จะถูกแปลงเป็นความร้อนที่ปล่อยออกมาในวงจรโรเตอร์เนื่องจากกระแสที่เกิดจากสนามสเตเตอร์คงที่ มั่นใจได้ถึงความนุ่มนวลของการเบรกโดยการควบคุมแรงดันไฟฟ้าที่ขั้วสเตเตอร์ นอกจากนี้ แรงบิดในการเบรกของมอเตอร์ที่มีเฟสโรเตอร์ยังสามารถควบคุมโดยลิโน่ในวงจรโรเตอร์ได้อีกด้วย ข้อเสียของการเบรกแบบไดนามิกคือความต้องการแหล่งจ่ายไฟ DC แรงดันต่ำ
37 เครื่องซิงโครนัส- เป็นเครื่องไฟฟ้ากระแสสลับ ความเร็วโรเตอร์เท่ากับความถี่การหมุนของสนามแม่เหล็กในช่องว่างอากาศ ส่วนหลักของเครื่องซิงโครนัสคือเกราะและตัวเหนี่ยวนำ การออกแบบที่พบบ่อยที่สุดคือแบบที่กระดองตั้งอยู่บนสเตเตอร์และมีตัวเหนี่ยวนำบนโรเตอร์แยกจากกันด้วยช่องว่างอากาศ กระดองคือขดลวดไฟฟ้ากระแสสลับตั้งแต่หนึ่งเส้นขึ้นไป ในมอเตอร์ กระแสที่จ่ายให้กับกระดองจะสร้างสนามแม่เหล็กหมุนที่จับคู่กับสนามของตัวเหนี่ยวนำ และทำให้พลังงานถูกแปลง สนามเกราะมีผลต่อสนามของตัวเหนี่ยวนำและเรียกอีกอย่างว่า สนามปฏิกิริยาสมอ. ในเครื่องกำเนิดไฟฟ้า สนามปฏิกิริยาสมอจะถูกสร้างขึ้น กระแสสลับเหนี่ยวนำให้เกิดขดลวดกระดองจากตัวเหนี่ยวนำ ตัวเหนี่ยวนำประกอบด้วยขั้ว - แม่เหล็กไฟฟ้ากระแสตรงหรือแม่เหล็กถาวร (ในไมโครแมชชีน) ตัวเหนี่ยวนำเครื่องซิงโครนัสมีสองแบบที่แตกต่างกัน: ขั้วเด่นหรือขั้วที่ไม่เด่น เครื่องเสาเด่นมีความโดดเด่นด้วยความจริงที่ว่าเสานั้นเด่นชัดและมีการออกแบบคล้ายกับเสาของเครื่อง DC ด้วยการออกแบบเสาโดยนัย ขดลวดกระตุ้นจะพอดีกับร่องของแกนเหนี่ยวนำ คล้ายกับการม้วนของใบพัดของเครื่องอะซิงโครนัสที่มีเฟสโรเตอร์ โดยมีความแตกต่างเพียงอย่างเดียวคือมีช่องว่างระหว่างเสาที่ไม่ใช่ เต็มไปด้วยตัวนำ (ที่เรียกว่า ฟันใหญ่). การออกแบบเสาที่ไม่โดดเด่นนั้นใช้ในเครื่องจักรความเร็วสูงเพื่อลดภาระทางกลบนเสา เพื่อลดความต้านทานแม่เหล็กนั่นคือเพื่อปรับปรุงทางเดินของฟลักซ์แม่เหล็กจะใช้แกนเฟอร์โรแมกเนติกของโรเตอร์และสเตเตอร์ โดยทั่วไปแล้วจะเป็นโครงสร้างเหล็กเคลือบด้วยไฟฟ้า (ซึ่งประกอบจากแผ่นแยกต่างหาก) เหล็กไฟฟ้ามีคุณสมบัติที่น่าสนใจหลายประการ โดยเฉพาะอย่างยิ่ง มีปริมาณซิลิกอนสูงเพื่อเพิ่มความต้านทานไฟฟ้าและลดกระแสไหลวน
การกระทำของสนามแม่เหล็กบนขดลวดที่มีกระแสไฟฟ้าทำให้สามารถใช้เพื่อกำหนดได้ โมดูลเหนี่ยวนำแม่เหล็กการหมุนขดลวดในสนามแม่เหล็กแสดงว่ามีแรงอย่างน้อยสองแรงกระทำกับมัน ผลลัพธ์ของแรงเหล่านี้จะถูกนำมาใช้ที่จุด A และ B (รูปที่ 6.8) แรงบิดกระทำต่อขดลวดจะเท่ากับผลคูณของแรงเหล่านี้ F̅ถึงรัศมีวงเลี้ยว ร.จุดนี้ไม่ต้องคำนวณ สามารถวัดได้โดยใช้คอยล์สปริงหรืออุปกรณ์ที่มีความละเอียดอ่อนอื่นๆ สำหรับวัดแรงบิดเชิงกลที่เชื่อมต่อกับคอยล์
การทดลองแสดงให้เห็นว่าขดลวดที่มีกระแสในสนามแม่เหล็กจะหมุนเสมอเพื่อให้ทิศทางของขดลวดปกติ นตรงกับทิศทางการเหนี่ยวนำแม่เหล็กของสนามที่กำลังศึกษาอยู่ บี.แน่นอนว่าในกรณีนี้ แรงบิดจะเป็นศูนย์ จะมีค่าสูงสุดเมื่อมุมระหว่างการเหนี่ยวนำแม่เหล็ก B̅และปกติ นจะเป็น 90°
การเหนี่ยวนำแม่เหล็กสามารถกำหนดได้โดยการกระทำของสนามแม่เหล็กบนกระแสที่มีกระแส
โดยไม่ต้องเปลี่ยนความแรงของกระแสในตัวนำ เราจะตรวจสอบว่าค่านั้นขึ้นอยู่อย่างไร แรงบิดสูงสุดจากพารามิเตอร์ของคอยล์
เมื่อวางขดลวดไว้ที่ระยะห่างจากตัวนำกระแสไฟฟ้าเราจะวัดแรงบิดสูงสุด Mmaxสำหรับค่ากระแสที่แน่นอนในขดลวด ฉัน 1. ลองเพิ่มกระแสในขดลวดเป็นสองเท่า ที่ ฉัน 2 = 2ฉัน 1โมเมนต์เชิงกลสูงสุดจะเท่ากับ M สูงสุด 2 = 2M สูงสุด 1. เช่นเดียวกันจะถูกสังเกตด้วยการเพิ่มความแข็งแกร่งในปัจจุบัน 3, 4, 5 เท่า ทางนี้, ค่าแรงบิดสูงสุดซึ่งทำหน้าที่เกี่ยวกับขดลวดกับกระแสจะเป็น สัดส่วนกับกระแสในขดลวด
เอ็มแม็กซ์~ฉันวิต
แรงบิด การกระทำกับขดลวดในสนามแม่เหล็กเป็นสัดส่วนกับความแรงของกระแสในนั้นวัสดุจากเว็บไซต์
หากเราเปลี่ยนคอยล์นี้ด้วยอีกอันหนึ่งด้วยพื้นที่ที่ใหญ่ขึ้นหรือเล็กลง S vitเราจะสังเกตเห็นการเพิ่มขึ้นหรือลดลงของค่าแรงบิดสูงสุดที่สอดคล้องกัน ทางนี้,
แรงบิดสูงสุด ซึ่งทำปฏิกิริยากับขดลวดในสนามแม่เหล็กเป็นสัดส่วนกับพื้นที่ของมัน:
เอ็มแม็กซ์~เอส วิต.
เมื่อรวมผลลัพธ์ของการวิจัยทั้งสองขั้นตอนเข้าด้วยกัน เราจะได้
เอ็มแม็กซ์~ฉันวิตเอส วิต.
ในหน้านี้ เนื้อหาในหัวข้อ:
แรงดันไฟฟ้า U 1 ที่ใช้กับเฟสของขดลวดสเตเตอร์นั้นสมดุลโดย EMF E 1 หลัก EMF การรั่วไหลและแรงดันตกคร่อมความต้านทานที่ใช้งานของขดลวดสเตเตอร์:
ในการหมุนของโรเตอร์ สมการที่คล้ายกันจะมีลักษณะดังนี้:
แต่เนื่องจากปิดโรเตอร์โรเตอร์ แรงดันไฟฟ้า U 2 \u003d 0 และถ้าเราพิจารณาด้วยว่า E 2s \u003d SE 2 และ x 2s \u003d Sx 2 สมการสามารถเขียนใหม่เป็น:
![]()
สมการของกระแสของมอเตอร์เหนี่ยวนำจะทำซ้ำสมการที่คล้ายกันสำหรับหม้อแปลง:
28 แรงบิดมอเตอร์แบบอะซิงโครนัส
แรงบิดในมอเตอร์เหนี่ยวนำถูกสร้างขึ้นโดยปฏิสัมพันธ์ของกระแสโรเตอร์กับสนามแม่เหล็กของเครื่อง แรงบิดสามารถแสดงทางคณิตศาสตร์ในแง่ของกำลังแม่เหล็กไฟฟ้าของเครื่อง:
ที่ไหน w 1 =2pn 1 /60 - ความถี่เชิงมุมของการหมุนของสนาม ในทางกลับกัน น 1 =f 1 60/รูเปีย, แล้ว
![]()
แทนในสูตร เอ็ม 1 การแสดงออก Rเอม=Pe2/สและหารด้วย 9.81 เราจะได้:
![]()
สมการแรงบิดของมอเตอร์เหนี่ยวนำ
ตามมาด้วยว่าแรงบิดของมอเตอร์นั้นแปรผันตามการสูญเสียทางไฟฟ้าในโรเตอร์ แทนที่ค่าปัจจุบันในสูตรสุดท้าย ฉัน 2 ’ :
เราได้รับสมการแรงบิดของมอเตอร์เหนี่ยวนำ:
ที่ไหน ยู 1 - แรงดันเฟสของขดลวดสเตเตอร์
29 .ลักษณะทางกลของมอเตอร์เรียกว่าการพึ่งพาความเร็วของโรเตอร์กับแรงบิดบนเพลา n = f (M2) เนื่องจากแรงบิดรอบเดินเบามีน้อยภายใต้ภาระ ดังนั้น M2 ≈ M และลักษณะทางกลจึงแสดงด้วยการพึ่งพา n = f (M) หากเราคำนึงถึงความสัมพันธ์ s = (n1 - n) / n1 จากนั้นคุณสมบัติทางกลสามารถรับได้โดยการนำเสนอการพึ่งพาแบบกราฟิกในพิกัด n และ M (รูปที่ 1)
ข้าว. 1. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
ลักษณะทางกลตามธรรมชาติของมอเตอร์เหนี่ยวนำสอดคล้องกับวงจรหลัก (หนังสือเดินทาง) ของการรวมและพารามิเตอร์เล็กน้อยของแรงดันไฟฟ้า ลักษณะประดิษฐ์จะได้รับหากมีองค์ประกอบเพิ่มเติม: ตัวต้านทาน, เครื่องปฏิกรณ์, ตัวเก็บประจุ เมื่อมอเตอร์ได้รับแรงดันไฟฟ้าที่ไม่มีพิกัด คุณลักษณะจะแตกต่างจากลักษณะทางกลตามธรรมชาติ
ลักษณะทางกลเป็นเครื่องมือที่สะดวกและมีประโยชน์มากในการวิเคราะห์โหมดสถิตและไดนามิกของไดรฟ์ไฟฟ้า
30 ลักษณะทางกลและการควบคุมตนเองของมอเตอร์. กราฟที่เชื่อมโยงปริมาณทางกล - ความเร็วและแรงบิด - เรียกว่าลักษณะทางกลของมอเตอร์เหนี่ยวนำ (รูปที่ 7) n = ƒ (M) การควบคุมตนเองของมอเตอร์แบบอะซิงโครนัสมีดังนี้ ให้เครื่องยนต์ทำงานอย่างมั่นคงในบางโหมด พัฒนาความเร็ว n1 และแรงบิด M1 ด้วยการหมุนที่สม่ำเสมอ โมเมนต์นี้จึงเท่ากับแรงบิดเบรก M t1, เช่น. M1=M t 1, n1= คอนเซ็ท การเพิ่มแรงบิดในการเบรกเป็น M2 จะทำให้ความเร็วของเครื่องจักรลดลง เนื่องจากแรงบิดในการเบรกจะมากกว่าแรงบิด ด้วยความเร็วที่ลดลง สลิปจะเพิ่มขึ้น ซึ่งจะทำให้ EMF และกระแสไฟในโรเตอร์เพิ่มขึ้น สิ่งนี้จะเพิ่มแรงบิดของเครื่องยนต์ กระบวนการนี้สิ้นสุดลงเมื่อแรงบิด M2 ที่พัฒนาโดยเครื่องยนต์มีค่าเท่ากับ M t 2. ในกรณีนี้ ความเร็วในการหมุนจะถูกตั้งไว้ต่ำกว่า n1 คุณสมบัติของสมดุลอัตโนมัติระหว่างการเบรกและแรงบิดเรียกว่า การควบคุมตนเอง.
บนแท่นวางในห้องปฏิบัติการ เครื่องยนต์มีเบรกไฟฟ้า ซึ่งประกอบด้วยแม่เหล็กไฟฟ้า ซึ่งอยู่ในช่องว่างที่แผ่นดิสก์หมุน วางอยู่บนเพลาเครื่องยนต์ ด้วยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับขดลวดแม่เหล็กไฟฟ้าด้วยที่จับของตัวเปลี่ยนรูปแบบอัตโนมัติ สามารถเปลี่ยนแรงเบรกได้ ซึ่งช่วงเวลาดังกล่าวคือ: M TORM \u003d F r (N m)
โดยที่ F คือแรง (แรง) ที่กระทำต่อเส้นรอบวงของรอก (N);
r - รัศมีรอกเท่ากับ 0.18 ม. พลังที่มีประโยชน์บนเพลามอเตอร์:
ที่ไหน น- ความเร็วรอบเครื่องยนต์ rpm.
โดยที่ƒ - ความถี่เครือข่าย (เท่ากับ 50 Hz)
R- จำนวนเสาคู่ของขดลวดสเตเตอร์ (เท่ากับ 2)
n 1 - ความเร็วซิงโครนัสของสนามแม่เหล็กหมุน
ความเร็วของเครื่องยนต์ถูกกำหนดโดยใช้เครื่องวัดวามเร็ว สลิปคำนวณโดยสูตร:
31 ลักษณะการทำงานพวกเขาเรียกการพึ่งพากำลังที่เครื่องยนต์ใช้, กระแสไฟที่ใช้ไป, ตัวประกอบกำลัง, ความเร็วของเครื่องยนต์, ประสิทธิภาพและแรงบิด M เกี่ยวกับกำลังที่มีประโยชน์ของเครื่องยนต์ที่ปล่อยบนเพลา ลักษณะการทำงานเป็นตัวกำหนดคุณสมบัติการทำงานพื้นฐานของมอเตอร์เหนี่ยวนำ ลักษณะการทำงานของมอเตอร์เหนี่ยวนำกำลังปานกลางแสดงในรูปที่ 8.8. พฤติกรรมของพวกเขาอธิบายได้ดังนี้ ที่โหลดเบา กระแสมอเตอร์ I (กระแสไม่มีโหลด) สามารถอยู่ระหว่าง 20% ถึง 70% ของกระแสไฟที่กำหนด เมื่อโหลดเพิ่มขึ้น กระแสในวงจรโรเตอร์จะเพิ่มขึ้น ซึ่งทำให้กระแสเพิ่มขึ้นเกือบตามสัดส่วน ฉันในวงจรสเตเตอร์
รูปที่ 8.8 แรงบิดของมอเตอร์ () เกือบจะเป็นสัดส่วนกับโหลดเช่นกัน แต่ที่โหลดสูง ความเป็นเส้นตรงของกราฟจะถูกรบกวนบ้างโดยการลดความเร็วของเครื่องยนต์ ลักษณะการทำงานเป็นการแสดงออกถึงความสัมพันธ์ระหว่างกำลังที่พัฒนาโดยมอเตอร์และการเลื่อนเฟสระหว่างกระแสสเตเตอร์และแรงดันไฟ มอเตอร์แบบอะซิงโครนัสเช่นหม้อแปลงไฟฟ้าใช้กระแส I จากเครือข่ายซึ่งอยู่นอกเฟสอย่างมีนัยสำคัญเมื่อใช้แรงดันไฟฟ้า ตัวอย่างเช่น ในโหมดปกติ ด้วยการเพิ่มภาระบนเพลามอเตอร์ ส่วนประกอบที่ทำงานอยู่ของกระแสโรเตอร์และสเตเตอร์จะเพิ่มขึ้น . ถึงค่าสูงสุดที่ .
เพิ่มขึ้นอีก มูลค่าจะลดลงบ้าง เนื่องจากการเพิ่มขึ้นของสลิป s ซึ่งทำให้เกิดการเพิ่มขึ้นของค่ารีแอกแตนซ์ของขดลวดโรเตอร์ และด้วยเหตุนี้ การเปลี่ยนเฟส . จากเพิ่มขึ้นและเพิ่มขึ้น กล่าวคือ จะลดลง
อธิบายลักษณะการทำงานของลักษณะการทำงานดังนี้ ค่าของประสิทธิภาพถูกกำหนดโดยอัตราส่วนของพลังงานที่มีประโยชน์ต่อพลังงานที่ใช้จากเครือข่าย
ค่านี้เรียกว่าการสูญเสียพลังงาน นอกเหนือจากการสูญเสียในเหล็กของสเตเตอร์และโรเตอร์เนื่องจากการพลิกกลับของสนามแม่เหล็กและกระแสน้ำวนซึ่งเมื่อรวมกับการสูญเสียทางกลถือได้ว่าคงที่แล้วยังมีการสูญเสียทองแดงในมอเตอร์แบบอะซิงโครนัส ,
เหล่านั้น. ในขดลวดสเตเตอร์และโรเตอร์ ซึ่งแปรผันตามกำลังสองของกระแสที่ไหลดังนั้นจึงขึ้นอยู่กับโหลด ในระหว่างรอบเดินเบา เช่นเดียวกับในหม้อแปลงไฟฟ้า การสูญเสียในเหล็กมีมากกว่า และเท่ากับกระแสที่ไม่มีโหลดซึ่งมีน้อย ด้วยโหลดขนาดเล็กบนเพลา การสูญเสียทองแดงยังคงน้อย ดังนั้นประสิทธิภาพที่กำหนดโดยสูตร ![]() (8.5)
(8.5)
เพิ่มขึ้นอย่างรวดเร็วในตอนแรก เมื่อการสูญเสียคงที่เท่ากับการสูญเสียที่ขึ้นอยู่กับภาระ , ประสิทธิภาพ ถึงมูลค่าสูงสุด เมื่อโหลดเพิ่มขึ้นอีก การสูญเสียพลังงานผันแปรจะเพิ่มขึ้นอย่างมากอันเป็นผลมาจากประสิทธิภาพ ลดลงอย่างเห็นได้ชัด ลักษณะของการเสพติด ) สามารถอธิบายได้จากความสัมพันธ์ . ถ้าประสิทธิภาพ เป็นค่าคงที่ จากนั้นจะมีความสัมพันธ์เชิงเส้นตรงระหว่าง และ แต่เนื่องจากประสิทธิภาพ ขึ้นอยู่กับและการพึ่งพานี้ในขั้นต้นจะเพิ่มขึ้นอย่างรวดเร็วและเมื่อโหลดเพิ่มขึ้นอีกเล็กน้อยจะเปลี่ยนไปเล็กน้อยเส้นโค้ง ) ครั้งแรกเพิ่มขึ้นอย่างช้า ๆ แล้วเพิ่มขึ้นอย่างรวดเร็ว
32 ในวงจรไฟฟ้าใดๆ ผลรวมของกำลังของแหล่งพลังงานไฟฟ้าทั้งหมดจะต้องเท่ากับผลรวมของกำลังของตัวรับและส่วนประกอบเสริมทั้งหมด เมื่อได้รับนิพจน์กำลังแล้วจึงเป็นไปได้ที่จะเขียนสมการสมดุลกำลังไฟฟ้าสำหรับวงจรไฟฟ้าใด ๆ ในรูปแบบทั่วไป:
Σ อี → ฉัน → + Σ ยู ← ฉัน → = Σ อี ← ฉัน → + Σ ยู → ฉัน → + Σ ฉัน 2 ร.
สมการ (1.35) สามารถเขียนได้ทั้งสำหรับทิศทาง EMF แรงดันและกระแสจริง และสำหรับกรณีที่บางทิศทางถูกเลือกโดยพลการ ในกรณีแรกเงื่อนไขทั้งหมดจะเป็นค่าบวกและองค์ประกอบที่สอดคล้องกันของวงจรจะเป็นแหล่งหรือตัวรับพลังงานไฟฟ้า ในทางกลับกัน หากคำศัพท์บางคำถูกเขียนขึ้นโดยคำนึงถึงทิศทางเชิงบวกที่เลือกโดยพลการ องค์ประกอบที่เกี่ยวข้องจะต้องถูกพิจารณาว่าเป็นแหล่งที่มาและผู้รับที่ตั้งใจไว้ จากการคำนวณหรือการวิเคราะห์ บางส่วนอาจกลายเป็นค่าลบ นี่จะหมายความว่าแหล่งที่คาดว่าจะเป็นอ่างล้างมือ และอ่างล้างมือที่คาดว่าเป็นแหล่ง
33 การสตาร์ทมอเตอร์แบบอะซิงโครนัสมาพร้อมกับกระบวนการชั่วคราวของเครื่องที่เกี่ยวข้องกับการเปลี่ยนแปลงของโรเตอร์จากสถานะพักไปเป็นสถานะการหมุนที่สม่ำเสมอ ซึ่งแรงบิดของเครื่องยนต์จะปรับสมดุลโมเมนต์ของแรงต้านทานบนเพลาเครื่อง เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสจะมีการใช้พลังงานไฟฟ้าเพิ่มขึ้นจากเครือข่ายการจ่ายไฟฟ้า ซึ่งไม่เพียงแต่ใช้ไปในการเอาชนะแรงบิดเบรกที่ใช้กับเพลาและครอบคลุมการสูญเสียในมอเตอร์แบบอะซิงโครนัสเท่านั้น แต่ยังรวมถึงการสื่อสารพลังงานจลน์บางอย่างด้วย ไปยังชิ้นส่วนที่เคลื่อนไหวของหน่วยการผลิต ดังนั้นเมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสจะต้องพัฒนาแรงบิดที่เพิ่มขึ้น สำหรับ มอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์แรงบิดเริ่มต้นเริ่มต้นซึ่งสอดคล้องกับสลิป sp = 1 ขึ้นอยู่กับความต้านทานเชิงแอ็คทีฟของตัวต้านทานแบบปรับได้ที่นำเข้าสู่วงจรโรเตอร์
ข้าว. 1. การสตาร์ทมอเตอร์แบบอะซิงโครนัสสามเฟสด้วยโรเตอร์เฟส: a - กราฟของการพึ่งพาแรงบิดของมอเตอร์ด้วยเฟสโรเตอร์บนสลิปที่ความต้านทานเชิงแอคทีฟต่างๆ ของตัวต้านทานในวงจรโรเตอร์ b - ไดอะแกรมของการรวม ตัวต้านทานและหน้าสัมผัสปิดการเร่งความเร็วในวงจรโรเตอร์ ดังนั้นด้วยการเร่งความเร็วแบบปิดหน้าสัมผัส U1, U2 เช่น เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสที่มีวงแหวนหน้าสัมผัสลัดวงจรแรงบิดเริ่มต้นเริ่มต้น Mp1 = (0.5 -1.0) Mnom และกระแสเริ่มต้นเริ่มต้น Ip = (4.5 - 7) Inom และ มากกว่า. แรงบิดเริ่มต้นขนาดเล็กของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีเฟสโรเตอร์อาจไม่เพียงพอต่อการขับเคลื่อนหน่วยการผลิตแล้วเร่งความเร็ว และกระแสเริ่มต้นที่มีนัยสำคัญจะทำให้ขดลวดมอเตอร์ร้อนขึ้น ซึ่งจะจำกัดความถี่ของการเปิดเครื่อง และในเครือข่ายที่ใช้พลังงานต่ำจะนำไปสู่การทำงานที่ไม่พึงประสงค์ของตัวรับอื่นๆ แรงดันไฟฟ้าตกชั่วคราว สถานการณ์เหล่านี้อาจเป็นสาเหตุที่ไม่รวมการใช้มอเตอร์แบบอะซิงโครนัสกับโรเตอร์เฟสที่มีกระแสไฟเริ่มต้นขนาดใหญ่เพื่อขับเคลื่อนกลไกการทำงาน การแนะนำตัวต้านทานแบบปรับได้ซึ่งเรียกว่าตัวต้านทานเริ่มต้นในวงจรโรเตอร์ของมอเตอร์ไม่เพียง แต่ลดกระแสเริ่มต้นเริ่มต้น แต่ยังเพิ่มแรงบิดเริ่มต้นเริ่มต้นซึ่งสามารถเข้าถึงแรงบิดสูงสุด Mmax (รูปที่ 1, a, เส้นโค้ง 3 ) หากสลิปวิกฤตของมอเตอร์ที่มีเฟสโรเตอร์คือ sc \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1 โดยที่ Rd" คือความต้านทานเชิงแอ็คทีฟของตัวต้านทานที่อยู่ในเฟสของ ขดลวดโรเตอร์ของมอเตอร์ลดลงถึงเฟสของขดลวดสเตเตอร์ การเพิ่มขึ้นในความต้านทานเชิงรุกของตัวต้านทานเริ่มต้นนั้นไม่สามารถทำได้ เนื่องจากจะทำให้แรงบิดเริ่มต้นเริ่มต้นลดลงและจุดออกของแรงบิดสูงสุดในพื้นที่ลื่น s > 1 ซึ่งไม่รวมความเป็นไปได้ของการเร่งความเร็วของโรเตอร์ ความต้านทานเชิงรุกที่ต้องการของตัวต้านทานสำหรับการสตาร์ทมอเตอร์ด้วยเฟสโรเตอร์นั้นพิจารณาจากข้อกำหนดของการสตาร์ท ซึ่งสามารถทำได้ง่ายเมื่อ Mp = (0.1 - 0.4) Mnom ปกติถ้า Mp - (0.5 - 0.75) Mnom และหนักที่ Mp ≥ Mnom เพื่อรักษาแรงบิดขนาดใหญ่เพียงพอโดยมอเตอร์ที่มีเฟสโรเตอร์ในระหว่างการเร่งความเร็วของหน่วยการผลิต เพื่อลดระยะเวลาของกระบวนการชั่วคราวและลดความร้อนของมอเตอร์ จำเป็นต้องค่อยๆ ลดความต้านทานแอคทีฟของการสตาร์ท ตัวต้านทาน การเปลี่ยนแปลงแรงบิดที่อนุญาตในระหว่างการเร่งความเร็ว M(t) ถูกกำหนดโดยสภาวะทางไฟฟ้าและทางกลที่จำกัดแรงบิดสูงสุดจำกัด M > 0.85 Mmax ช่วงเวลาการเปลี่ยน M2 > > Ms (รูปที่ 2) เช่นเดียวกับการเร่งความเร็ว
ข้าว. 2. ลักษณะการเริ่มต้นของมอเตอร์แบบอะซิงโครนัสสามเฟสพร้อมโรเตอร์เฟส การสลับตัวต้านทานการสตาร์ทนั้นทำได้โดยการเปิดคอนแทคเตอร์เร่งความเร็ว Y1, Y2 ตามลำดับ ที่เวลา t1, t2 นับจากวินาทีที่เครื่องยนต์สตาร์ท เมื่อในระหว่างการเร่งความเร็ว แรงบิด M จะเท่ากับโมเมนต์สวิตชิ่ง M2 ด้วยเหตุนี้ ในระหว่างการสตาร์ทเครื่องทั้งหมด แรงบิดสูงสุดทั้งหมดจึงเท่ากัน และแรงบิดสวิตชิ่งทั้งหมดจะเท่ากัน เนื่องจากแรงบิดและกระแสของมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์มีความเกี่ยวข้องกัน จึงเป็นไปได้ที่จะตั้งค่าขีดจำกัดกระแสไฟสูงสุด I1 \u003d (1.5 - 2.5) Inom และกระแสสลับ I2 ในระหว่างการเร่งความเร็วของโรเตอร์ซึ่งควรให้ ช่วงเวลาเปลี่ยน M2\u003e Mc การตัดการเชื่อมต่อของมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์จากเครือข่ายการจ่ายไฟมักจะดำเนินการกับวงจรโรเตอร์ที่ลัดวงจร เพื่อหลีกเลี่ยงแรงดันไฟเกินในเฟสของขดลวดสเตเตอร์ ซึ่งอาจเกินแรงดันไฟฟ้าที่กำหนดของเฟสเหล่านี้ 3-4 เท่า หากวงจรโรเตอร์เปิดอยู่ในขณะที่ดับเครื่องยนต์
34 การควบคุมความถี่วิธีการควบคุมความเร็วนี้ช่วยให้สามารถใช้มอเตอร์แบบอะซิงโครนัสที่เชื่อถือได้และราคาถูกที่สุดกับโรเตอร์กรงกระรอก อย่างไรก็ตาม ในการเปลี่ยนความถี่ของแรงดันไฟ จำเป็นต้องใช้แหล่งกระแสความถี่แปรผัน ในขณะที่รุ่นหลังใช้เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสที่มีความเร็วตัวแปรหรือเครื่องแปลงความถี่ - ไฟฟ้าหรือแบบคงที่ซึ่งทำบนวาล์วเซมิคอนดักเตอร์ควบคุม (ไทริสเตอร์) ปัจจุบันเครื่องแปลงความถี่มีวงจรที่ค่อนข้างซับซ้อนและมีราคาค่อนข้างสูง อย่างไรก็ตาม การพัฒนาอย่างรวดเร็วของเทคโนโลยีเซมิคอนดักเตอร์กำลังช่วยให้เราหวังว่าจะมีการปรับปรุงตัวแปลงความถี่ต่อไป ซึ่งจะเปิดโอกาสสำหรับการใช้การควบคุมความถี่อย่างแพร่หลาย คำอธิบายโดยละเอียดของกฎหมายควบคุมสำหรับการควบคุมความถี่และการวิเคราะห์การทำงานของมอเตอร์แบบอะซิงโครนัสเมื่อขับเคลื่อนโดยตัวแปลงความถี่มีอยู่ใน § 4.13 และ 4.14 ระเบียบโดยการเปลี่ยนจำนวนเสากฎระเบียบนี้ช่วยให้คุณได้รับการเปลี่ยนแปลงความเร็ว ในรูป 4.35 แสดงวงจรที่ง่ายที่สุด (สำหรับหนึ่งเฟส) ซึ่งช่วยให้คุณสามารถเปลี่ยนจำนวนขั้วของขดลวดสเตเตอร์ได้สองครั้ง เมื่อต้องการทำเช่นนี้ แต่ละเฟสของขดลวดสเตเตอร์จะแบ่งออกเป็นสองส่วน ซึ่งจะเปลี่ยนจากการเชื่อมต่อแบบอนุกรมเป็นแบบขนาน เห็นได้จากรูปว่า เมื่อเปิดขดลวด 1-2 และ 3-4 ในกิ่งขนานสองกิ่ง จำนวนขั้วจะลดลงครึ่งหนึ่ง ส่งผลให้ความถี่ของการหมุนของสนามแม่เหล็กเพิ่มขึ้นเป็นสองเท่าเมื่อทำการสลับ จำนวนรอบที่เชื่อมต่อแบบอนุกรมในแต่ละเฟสจะลดลงครึ่งหนึ่ง แต่เนื่องจากความเร็วในการหมุนเพิ่มขึ้นเป็นสองเท่า EMF ที่เหนี่ยวนำในเฟสยังคงไม่เปลี่ยนแปลง ดังนั้นมอเตอร์ที่ความเร็วทั้งสองสามารถเชื่อมต่อกับเครือข่ายด้วยแรงดันไฟฟ้าเดียวกันได้ เพื่อไม่ให้เปลี่ยนการหมุนของโรเตอร์ให้ทำหลัง ไฟฟ้าลัดวงจร. หากคุณต้องการความเร็วสามหรือสี่ระดับ ขดลวดอีกอันจะถูกวางบนสเตเตอร์ โดยการเปลี่ยนซึ่งคุณจะได้รับความถี่เพิ่มเติมสองความถี่ มอเตอร์เหนี่ยวนำที่เปลี่ยนขั้วเรียกว่า หลายความเร็ว. การควบคุมโดยการรวมลิโน่ไว้ในวงจรโรเตอร์. เมื่อรวมความต้านทานแบบแอคทีฟเพิ่มเติมไว้ในวงจรโรเตอร์ Rต่อ 1 , Rต่อ 2 , R add3 และอื่น ๆ เปลี่ยนรูปแบบของการพึ่งพา M = ฉและลักษณะทางกล น 2 = ฉ(M)เครื่องยนต์ (รูปที่ 4.37, a) ในขณะเดียวกันก็มีโมเมนต์โหลดบ้าง เอ็ม n ใบการแข่งขัน ส 1 , ส 2 , ส 3 , ..., ใหญ่กว่าสลิป ส e เมื่อเครื่องยนต์ทำงานในลักษณะที่เป็นธรรมชาติ (เมื่อ Rต่อ = 0) ดังนั้นความเร็วของเครื่องยนต์ในสภาวะคงที่จึงลดลงจาก น อีก่อน พี 1 พี 2 , พี่ 3 ,... (รูปที่ 4.37, ข). วิธีการควบคุมนี้ใช้ได้กับมอเตอร์สลิปแหวนเท่านั้น ช่วยให้คุณเปลี่ยนความเร็วได้อย่างราบรื่นในช่วงกว้าง ข้อเสียของมันคือ: ก) การสูญเสียพลังงานจำนวนมากในลิโน่ควบคุม; b) ลักษณะทางกล "อ่อน" มากเกินไปของเครื่องยนต์ที่มีความต้านทานสูงในวงจรโรเตอร์ ในบางกรณี สิ่งหลังไม่เป็นที่ยอมรับ เนื่องจากการเปลี่ยนแปลงเล็กน้อยในแรงบิดโหลดสอดคล้องกับการเปลี่ยนแปลงที่สำคัญของความเร็ว
35 เครื่องกำเนิดแบบอะซิงโครนัส- นี่คือเครื่องจักรไฟฟ้าแบบอะซิงโครนัส (เครื่องยนต์เอล) ที่ทำงานในโหมดเครื่องกำเนิดไฟฟ้า ด้วยความช่วยเหลือของมอเตอร์ขับเคลื่อน (ในกรณีของเราคือกังหันลม) โรเตอร์ของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสจะหมุนไปในทิศทางเดียวกับสนามแม่เหล็ก ในกรณีนี้การลื่นของโรเตอร์จะกลายเป็นค่าลบ แรงบิดในการเบรกจะปรากฏขึ้นบนเพลาของเครื่องอะซิงโครนัส และเครื่องกำเนิดไฟฟ้าจะถ่ายเทพลังงานไปยังเครือข่าย เพื่อกระตุ้นแรงเคลื่อนไฟฟ้าในวงจรเอาท์พุต จะใช้การสะกดจิตที่เหลือของโรเตอร์ สำหรับสิ่งนี้จะใช้ตัวเก็บประจุ เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสไม่ไวต่อการลัดวงจร เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสง่ายกว่าเครื่องกำเนิดไฟฟ้าแบบซิงโครนัส (เช่น เครื่องกำเนิดไฟฟ้ารถยนต์): หากเครื่องกำเนิดไฟฟ้าแบบหลังมีตัวเหนี่ยวนำวางอยู่บนโรเตอร์ โรเตอร์ของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสจะดูเหมือนล้อช่วยแรงแบบธรรมดา เครื่องกำเนิดไฟฟ้าดังกล่าวได้รับการปกป้องจากสิ่งสกปรกและความชื้นได้ดีกว่า ทนทานต่อการลัดวงจรและการโอเวอร์โหลด และแรงดันไฟขาออกของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสมีระดับการบิดเบือนที่ไม่เป็นเชิงเส้นต่ำกว่า วิธีนี้ช่วยให้คุณใช้เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสไม่เพียงแต่ให้พลังงานแก่อุปกรณ์อุตสาหกรรมที่ไม่สำคัญต่อรูปร่างของแรงดันไฟฟ้าขาเข้าเท่านั้น แต่ยังเชื่อมต่อกับอุปกรณ์อิเล็กทรอนิกส์ด้วย เป็นเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสที่เป็นแหล่งกระแสในอุดมคติสำหรับอุปกรณ์ที่มีโหลดแบบแอคทีฟ (โอห์มมิก): เครื่องทำความร้อนไฟฟ้า เครื่องแปลงการเชื่อม หลอดไส้ อุปกรณ์อิเล็กทรอนิกส์ วิศวกรรมคอมพิวเตอร์และวิทยุ ประโยชน์ของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัส . ข้อดีเหล่านี้รวมถึงปัจจัยที่ชัดเจนต่ำ (ค่าสัมประสิทธิ์ฮาร์มอนิก) ซึ่งแสดงลักษณะการมีอยู่เชิงปริมาณของฮาร์โมนิกที่สูงขึ้นในแรงดันเอาต์พุตของเครื่องกำเนิดไฟฟ้า ฮาร์โมนิกที่สูงขึ้นทำให้เกิดการหมุนที่ไม่สม่ำเสมอและทำให้มอเตอร์ไฟฟ้าร้อนขึ้นโดยเปล่าประโยชน์ เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสสามารถมีปัจจัยที่ชัดเจนได้ถึง 15% และปัจจัยที่ชัดเจนของเครื่องกำเนิดแบบอะซิงโครนัสไม่เกิน 2% ดังนั้นเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสจึงผลิตพลังงานที่มีประโยชน์ในทางปฏิบัติเท่านั้น ข้อดีอีกประการของเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสคือไม่มีขดลวดหมุนและชิ้นส่วนอิเล็กทรอนิกส์ที่ไวต่ออิทธิพลภายนอกและมักจะเกิดความเสียหายได้ง่าย ดังนั้นเครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสจึงไม่เกิดการสึกหรอและสามารถให้บริการได้เป็นเวลานาน เอาต์พุตของเครื่องกำเนิดไฟฟ้าของเราคือ 220/380V AC ทันที ซึ่งสามารถใช้โดยตรงกับเครื่องใช้ในครัวเรือน (เช่น เครื่องทำความร้อน) เพื่อชาร์จแบตเตอรี่ เชื่อมต่อกับโรงเลื่อย และสำหรับการทำงานแบบขนานกับเครือข่ายแบบเดิม ในกรณีนี้ คุณจะต้องจ่ายส่วนต่างที่ใช้ไปจากเครือข่ายและสร้างโดยกังหันลม เพราะ เนื่องจากแรงดันไฟฟ้ามาถึงพารามิเตอร์ทางอุตสาหกรรมทันที คุณจึงไม่จำเป็นต้องใช้ตัวแปลงต่างๆ (อินเวอร์เตอร์) เมื่อเครื่องกำเนิดลมเชื่อมต่อโดยตรงกับโหลดของคุณ ตัวอย่างเช่น คุณสามารถเชื่อมต่อโดยตรงกับโรงเลื่อย และทำงานราวกับว่าคุณเชื่อมต่อกับเครือข่าย 380V ในที่ที่มีลมแรง ดังที่คุณทราบ เพื่อลดเวลาเบรกเมื่อหยุดเครื่องจักรและกลไกการผลิต มักใช้เบรกแบบกลไก การลดเวลาเบรก โดยเฉพาะอย่างยิ่งในกรณีของรอบการทำงานสั้น ส่งผลให้ผลิตภาพของเครื่องจักรและกลไกเพิ่มขึ้นอย่างมาก ข้อเสียของเบรกแบบกลไกคือการสึกหรออย่างรวดเร็วของพื้นผิวการถู ความซับซ้อนและความจำเป็นในการปรับแรงเบรกเป็นระยะ ความต้องการพื้นที่เพิ่มเติมสำหรับการวางเบรกและการเชื่อมต่อกับกลไก ข้อเสียทั้งหมดข้างต้นจะหมดไป หากตามวัตถุประสงค์ที่ระบุไว้ แทนที่จะใช้เบรกแบบกลไก คุณสมบัติของมอเตอร์ไฟฟ้าถูกใช้ในการทำงานในโหมดเบรก กล่าวคือ เพื่อทำงานเป็นหลักในฐานะเครื่องกำเนิดไฟฟ้า และพัฒนาไม่ใช่แรงบิด แต่เป็น แรงบิดเบรก ในเครื่องจักรสำหรับยกและขนย้ายจำนวนมาก (เครน ลิฟต์ บันไดเลื่อน ฯลฯ) ที่ซึ่งการเคลื่อนไหวภายใต้อิทธิพลของแรงโน้มถ่วงเป็นไปได้ อัตราการโหลดที่ลดลงอย่างต่อเนื่องและสม่ำเสมอจะรับประกันได้โดยใช้แรงบิดเบรกของมอเตอร์ไฟฟ้า มอเตอร์กระแสตรงสามารถทำงานในโหมดเบรกสามโหมด:
ในโหมดฝ่ายค้าน;
ในโหมดเครื่องกำเนิดไฟฟ้าที่มีการส่งออกพลังงานไปยังเครือข่าย
ในโหมดเบรกแบบไดนามิก
ในโหมดการเบรกใดๆ มอเตอร์ไฟฟ้าทำงานเป็นเครื่องกำเนิดไฟฟ้า แปลง ตัวอย่างเช่น พลังงานจลน์ของชิ้นส่วนที่เคลื่อนไหว หรือพลังงานศักย์ของโหลดจากมากไปหาน้อยเป็นพลังงานไฟฟ้า
36 เมื่อเครื่องยนต์ถอยหลังขณะเคลื่อนที่โดยเปลี่ยนสวิตช์ การเบรกจะเกิดขึ้นจากความเร็วที่กำหนดเป็นศูนย์ก่อน จากนั้นจึงเร่งความเร็วในอีกทางหนึ่ง การเบรกดังกล่าวยังสามารถใช้เบรกในช่วงที่เรียกว่า ฝ่ายค้าน. ในระหว่างการพลิกกลับหรือการเบรก มอเตอร์เหนี่ยวนำแบบกรงกระรอกจะมีกระแสที่สำคัญ ดังนั้น ตามสภาพความร้อนของเครื่องยนต์เหล่านี้ จำนวนการพลิกกลับต่อชั่วโมงไม่เกินสิบ เพื่อจำกัดกระแสและเพิ่มแรงบิด ความต้านทานจะถูกนำเข้าสู่วงจรเฟสโรเตอร์ของมอเตอร์แบบอะซิงโครนัส ลองพิจารณาสามวิธีหลักในการเบรกด้วยไฟฟ้าของมอเตอร์แบบอะซิงโครนัส เบรกโดยการต่อต้าน ตามที่ระบุไว้ จะดำเนินการเมื่อสตาร์ทเครื่องยนต์ขณะเดินทาง ในกรณีนี้ สนามแม่เหล็กจะหมุนไปในทิศทางตรงกันข้ามที่สัมพันธ์กับทิศทางการหมุนของมอเตอร์ และแรงบิดของมอเตอร์ก็เบรก - มันขัดกับทิศทางของการหมุน เบรกเครื่องกำเนิดไฟฟ้า เกิดขึ้นเมื่อเปลี่ยนเครื่องยนต์หลายความเร็วขณะเคลื่อนที่จากความเร็วที่สูงขึ้นไปเป็นความเร็วที่ต่ำลงเช่น เมื่อเปลี่ยนเครื่องจากเสาจำนวนน้อยเป็นเสาที่ใหญ่ขึ้น ในช่วงเวลาแรกของการเปลี่ยนความเร็วของเครื่องยนต์จะสูงกว่าความเร็วของสนามมาก กล่าวคือ สลิปกลายเป็นลบและเครื่องจะสลับไปที่โหมดเครื่องกำเนิดไฟฟ้า การเบรกเกิดขึ้นพร้อมกับการแปลงพลังงานจลน์ของชิ้นส่วนที่หมุนไปเป็นพลังงานไฟฟ้า ซึ่งให้เครือข่ายลบการสูญเสียในเครื่อง การเบรกของเครื่องกำเนิดไฟฟ้าสามารถอยู่ในลิฟต์ยกได้เมื่อลดภาระหนักลง เร่งเครื่องยนต์ให้มีความเร็วเกินซิงโครนัส จากนั้นเครื่องจะเริ่มส่งพลังงานให้กับเครือข่ายโดยโหลดจากมากไปน้อย การเบรกของเครื่องกำเนิดไฟฟ้าสามารถทำได้ที่ความเร็วโอเวอร์ซิงโครนัสเท่านั้น หากต้องดับเครื่องยนต์เมื่อสิ้นสุดการเบรก เมื่อสิ้นสุดการเบรก เราควรเปลี่ยนไปใช้การเบรกแบบกลไกหรือการเบรกด้วยไฟฟ้าประเภทอื่น (ไดนามิก การสลับสับเปลี่ยน) หากจำเป็น การยึดตำแหน่งในตอนท้ายทำได้โดยใช้เบรกแบบกลไกเท่านั้น ที่ เบรกแบบไดนามิก ขดลวดสเตเตอร์ของมอเตอร์ถูกตัดการเชื่อมต่อจากเครือข่ายสามเฟสและเชื่อมต่อกับเครือข่ายกระแสตรงหรือไฟฟ้ากระแสสลับแบบเฟสเดียว ในกรณีนี้สามารถเชื่อมต่อเฟสของขดลวดสเตเตอร์ได้หลายวิธี ขดลวดสเตเตอร์ซึ่งขับเคลื่อนโดยกระแสตรงจะสร้างสนามแม่เหล็กที่อยู่กับที่ เช่นเดียวกับระหว่างการทำงานปกติของเครื่องยนต์ สนามการหมุนของมันจะลากโรเตอร์ไปพร้อมกับมัน สนามหยุดนิ่งระหว่างการเบรกแบบไดนามิกทำให้โรเตอร์หยุดอย่างรวดเร็ว พลังงานจลน์ของชิ้นส่วนที่หมุนได้จะถูกแปลงเป็นความร้อนที่ปล่อยออกมาในวงจรโรเตอร์เนื่องจากกระแสที่เกิดจากสนามสเตเตอร์คงที่ มั่นใจได้ถึงความนุ่มนวลของการเบรกโดยการควบคุมแรงดันไฟฟ้าที่ขั้วสเตเตอร์ นอกจากนี้ แรงบิดในการเบรกของมอเตอร์ที่มีเฟสโรเตอร์ยังสามารถควบคุมโดยลิโน่ในวงจรโรเตอร์ได้อีกด้วย ข้อเสียของการเบรกแบบไดนามิกคือความต้องการแหล่งจ่ายไฟ DC แรงดันต่ำ
37 เครื่องซิงโครนัส- เป็นเครื่องไฟฟ้ากระแสสลับ ความเร็วโรเตอร์เท่ากับความถี่การหมุนของสนามแม่เหล็กในช่องว่างอากาศ ส่วนหลักของเครื่องซิงโครนัสคือเกราะและตัวเหนี่ยวนำ การออกแบบที่พบบ่อยที่สุดคือแบบที่กระดองตั้งอยู่บนสเตเตอร์และมีตัวเหนี่ยวนำบนโรเตอร์แยกจากกันด้วยช่องว่างอากาศ กระดองคือขดลวดไฟฟ้ากระแสสลับตั้งแต่หนึ่งเส้นขึ้นไป ในมอเตอร์ กระแสที่จ่ายให้กับกระดองจะสร้างสนามแม่เหล็กหมุนที่จับคู่กับสนามของตัวเหนี่ยวนำ และทำให้พลังงานถูกแปลง สนามเกราะมีผลต่อสนามของตัวเหนี่ยวนำและเรียกอีกอย่างว่า สนามปฏิกิริยาสมอ. ในเครื่องกำเนิดไฟฟ้า สนามปฏิกิริยาของกระดองถูกสร้างขึ้นโดยกระแสสลับที่เกิดขึ้นในขดลวดกระดองจากตัวเหนี่ยวนำ ตัวเหนี่ยวนำประกอบด้วยขั้ว - แม่เหล็กไฟฟ้ากระแสตรงหรือแม่เหล็กถาวร (ในไมโครแมชชีน) ตัวเหนี่ยวนำเครื่องซิงโครนัสมีสองแบบที่แตกต่างกัน: ขั้วเด่นหรือขั้วที่ไม่เด่น เครื่องเสาเด่นมีความโดดเด่นด้วยความจริงที่ว่าเสานั้นเด่นชัดและมีการออกแบบคล้ายกับเสาของเครื่อง DC ด้วยการออกแบบเสาโดยนัย ขดลวดกระตุ้นจะพอดีกับร่องของแกนเหนี่ยวนำ คล้ายกับการม้วนของใบพัดของเครื่องอะซิงโครนัสที่มีเฟสโรเตอร์ โดยมีความแตกต่างเพียงอย่างเดียวคือมีช่องว่างระหว่างเสาที่ไม่ใช่ เต็มไปด้วยตัวนำ (ที่เรียกว่า ฟันใหญ่). การออกแบบเสาที่ไม่โดดเด่นนั้นใช้ในเครื่องจักรความเร็วสูงเพื่อลดภาระทางกลบนเสา เพื่อลดความต้านทานแม่เหล็กนั่นคือเพื่อปรับปรุงทางเดินของฟลักซ์แม่เหล็กจะใช้แกนเฟอร์โรแมกเนติกของโรเตอร์และสเตเตอร์ โดยทั่วไปแล้วจะเป็นโครงสร้างเหล็กเคลือบด้วยไฟฟ้า (ซึ่งประกอบจากแผ่นแยกต่างหาก) เหล็กไฟฟ้ามีคุณสมบัติที่น่าสนใจหลายประการ โดยเฉพาะอย่างยิ่ง มีปริมาณซิลิกอนสูงเพื่อเพิ่มความต้านทานไฟฟ้าและลดกระแสไหลวน





