การใช้งาน: ในครัวเรือนและอุตสาหกรรมไดรฟ์ไฟฟ้าและแหล่งจ่ายไฟ Essence: เครื่องอะซิงโครนัสกับ โรเตอร์กรงกระรอกประกอบด้วยสเตเตอร์ที่มีขดลวดหลายเฟสกระจายในทิศทางตามแนวแกนและโรเตอร์ที่มีแกนนำไฟฟ้าในแนวแกนและองค์ประกอบปิด องค์ประกอบปิดอาจอยู่ในรูปของวงแหวนหรือแท่งเกลียว สเตเตอร์ที่มีขดลวดสามารถแบ่งย่อยตามช่องว่างตามแนวรัศมีตามยาวออกเป็นสองส่วนหรือมากกว่า ซึ่งในบางกรณีอาจมีความก้าวหน้าทางเทคโนโลยีมากกว่า 7w.p. f-ly, 8 ป่วย
ในทางกลับกัน การเปิดตัวประเภทนี้มีความยืดหยุ่นสูง เนื่องจากปรับจำนวนได้ง่ายและ รูปร่างกราฟแสดงเวลาต่อเนื่องกัน ความจำเป็นทางกลหรือทางไฟฟ้า โดยทั่วไป ทิศทางของการหมุนจะกลับด้านโดยการเปลี่ยนกระแส ซึ่งทำให้สนามเกราะกลับด้าน
ในมอเตอร์แบบกรงกระรอกสามเฟส ทิศทางการหมุนของมอเตอร์จะกลับกัน หากมีการสลับสองเฟสของวงจรจ่ายไฟสามวงจร โดยทั่วไปแล้ว การลงทุนเหล่านี้ทำด้วยคอนแทคเตอร์ ทำให้เกิดวงจรที่ซับซ้อนซึ่งต้องการความรู้ที่ลึกซึ้งยิ่งขึ้นและการศึกษามอเตอร์ไฟฟ้าที่ไม่ตกอยู่ภายใต้ระดับนี้
การประดิษฐ์นี้เกี่ยวข้องกับอะซิงโครนัส เครื่องจักรไฟฟ้าและสามารถนำมาใช้ในไดรฟ์ไฟฟ้าความเร็วสูงในประเทศและอุตสาหกรรมตลอดจนโรงไฟฟ้าที่มีไดรฟ์ความเร็วสูง
เครื่องสะสมที่มีชื่อเสียงของการออกแบบต่างๆ (1). ให้ความเร็วในการหมุนที่สูงพอๆ กับมอเตอร์ พวกมันมีข้อเสียที่สำคัญเช่น ความน่าเชื่อถือต่ำ เทคโนโลยีต่ำ ความซับซ้อนของการบำรุงรักษา อายุการใช้งานสั้นเนื่องจากการมีชุดตัวเก็บแปรง
สนามแม่เหล็กของสเตเตอร์ ความเร็วซิงโครนัสคงที่และขึ้นอยู่กับความถี่ของแรงดันไฟฟ้า เครือข่ายไฟฟ้าที่ต่อมอเตอร์และจำนวนขั้วคู่ของมอเตอร์ อย่างในกรณี มอเตอร์สามเฟส, ความเร็วซิงโครนัสของมอเตอร์เหนี่ยวนำเฟสเดียวทั้งหมดถูกกำหนดโดยสมการ
เครื่องซิงโครนัสสามารถทำงานเป็นเครื่องกำเนิดไฟฟ้าหรือเป็นมอเตอร์ได้ มอเตอร์นี้มีลักษณะเฉพาะเนื่องจากความเร็วในการหมุนเป็นสัดส่วนโดยตรงกับความถี่ของแหล่งจ่ายไฟหลัก กระแสสลับใครส่งมาให้. มอเตอร์ซิงโครนัสใช้แนวคิดเดียวกันกับสนามแม่เหล็กหมุนที่สร้างโดยสเตเตอร์ แต่ตอนนี้โรเตอร์ประกอบด้วยแม่เหล็กไฟฟ้าหรือแม่เหล็กถาวรที่หมุนไปพร้อมกับสนามของสเตเตอร์
ใกล้เคียงกับที่เสนอมากที่สุดคือเครื่องอะซิงโครนัสที่มีโรเตอร์กรงกระรอกที่มีสเตเตอร์แบบเฟอร์โรแมกเนติกพร้อมช่องและวางขดลวดกระดองแบบหลายเฟสโรเตอร์ที่มีแกนแกนนำไฟฟ้าและองค์ประกอบล็อคในรูปแบบของวงแหวน (2) เครื่องจักรเช่นเครื่องยนต์นั้นปราศจากการขาดตัวสะสมเนื่องจากไม่มีตัวสะสมและแปรงมันเรียบง่ายและเชื่อถือได้ อย่างไรก็ตาม ข้อเสียเปรียบที่สำคัญของมันคือความจริงที่ว่าเมื่อขับเคลื่อนจากเครือข่ายความถี่ f จะไม่สามารถให้ความเร็วในการหมุนโดยพื้นฐาน n> 60f rpm และในฐานะเครื่องกำเนิด - ความถี่แรงดันไฟฟ้า f< n/60 Гц, и как следствие этого, имеет ограниченную область применения.
ประกอบด้วยขดลวดไฟฟ้ากระแสสลับสามเฟสที่เรียกว่าขดลวดเหนี่ยวนำและวงจรแม่เหล็กที่เกิดขึ้นจากการซ้อนแผ่นแม่เหล็ก ส่วนที่หมุนได้ คุณสมบัติที่เหลือของโรเตอร์นั้นสัมพันธ์กับจุดประสงค์เพื่อให้ได้สนามระหว่างโรเตอร์กับสเตเตอร์ของลักษณะไซน์และขึ้นอยู่กับชนิดของเครื่องซิงโครนัส: เครื่องจักรที่มีเสายื่นออกมา: โรเตอร์คือการขยายตัวของขั้วที่ส่งผลให้ ช่องว่างอากาศผันแปร ประกอบด้วยวงจรแม่เหล็กที่เกิดขึ้นจากการซ้อนแผ่นแม่เหล็กที่บางกว่าสเตเตอร์ ซึ่งป้องกันไม่ให้เครื่องทำงานด้วยความเร็วที่แตกต่างจากการซิงโครไนซ์
จุดมุ่งหมายของการประดิษฐ์นี้คือการขยายขอบเขตโดยที่ยังคงความเรียบง่ายและความน่าเชื่อถือ
เป้าหมายนี้ทำได้โดยความจริงที่ว่าสล็อตของสเตเตอร์ของเครื่องถูกทำมุมเอียงตามแนวเกลียวตามแนวแกนของเครื่องและขดลวดกระดองและแท่งปิดขององค์ประกอบโรเตอร์จะกระจายไปในทิศทางแกนและ องค์ประกอบปิดของโรเตอร์ถูกวางไว้ในชั้นพื้นผิวที่ทำงานอยู่ ในกรณีนี้ แท่งปิดขององค์ประกอบโรเตอร์สามารถทำได้ในรูปแบบของวงแหวนที่อยู่ในร่องวงแหวนซึ่งตั้งฉากกับแกนของเครื่อง นอกจากนี้ องค์ประกอบที่ปิดก้านโรเตอร์ยังสามารถทำขึ้นในรูปแบบของแท่งเกลียว โดยวางไว้ในร่องที่ทำขึ้นเป็นพิเศษสำหรับพวกเขา โดยเอียงไปตามวิถีโคจรตามแนวแกนของเครื่องจักรและต่อด้วยไฟฟ้ากับแท่งแกนที่ทางแยก ขดลวดกระดองของเครื่องประกอบด้วยส่วนต่างๆ ซึ่งแต่ละส่วนประกอบด้วยส่วนที่เป็นเกลียวและส่วนหน้าตรง และส่วนหน้าของส่วนต่างๆ จะถูกวางไว้ในร่องตามแนวแกนที่ทำขึ้นเป็นพิเศษสำหรับพวกเขาในสเตเตอร์ ช่องว่างอากาศตามเส้นรอบวงของสเตเตอร์เจาะในบริเวณส่วนปลายของขดลวดกระดอง (ร่องแกนของสเตเตอร์) ควรทำไม่สม่ำเสมอโดยการลดขนาดรัศมีของสเตเตอร์ ควรทำร่องตามแนวแกนของสเตเตอร์ที่มีค่าความลึกใกล้เคียงกับขนาดรัศมีของสเตเตอร์หรือผ่านในทิศทางแนวรัศมีด้วยการก่อตัวของช่อง สเตเตอร์และขดลวดกระดองสามารถแบ่งออกตามช่องว่างตามยาวออกเป็นสองส่วนหรือมากกว่า และส่วนของแต่ละส่วนของขดลวดกระดองประกอบด้วยสองส่วนที่ใช้งานอยู่และสองส่วนหน้าผากที่อยู่ในช่องว่างที่ระบุ หากองค์ประกอบปิดของโรเตอร์เป็นเกลียว ขั้นตอนและทิศทางของ "สกรู" ของสเตเตอร์และร่องโรเตอร์ที่มีวิถีโคจรควรเหมือนกัน
และระบบการบินและการนำทาง
เครื่องโรตารี่แบบเรียบ: ขดลวดกระตุ้นกระจายเป็นขดลวดหลาย ๆ อันจัดเรียงเป็นมุมต่างกัน การทำงานของเครื่องซิงโครนัสแตกต่างอย่างมากจากการทำงานของเครื่องแบบอะซิงโครนัส แม่เหล็กถาวร มอเตอร์ซิงโครนัสถูกใช้เมื่อต้องการความเร็วคงที่
ในฐานะที่เป็นมอเตอร์: ในกรณีนี้ เครื่องซิงโครนัสจะขับเคลื่อนด้วยความเร็วของการซิงโครไนซ์ เครื่องอะซิงโครนัสหรือที่เรียกว่าเครื่องเหนี่ยวนำเป็นเครื่องไฟฟ้ากระแสสลับที่ไม่มีการเชื่อมต่อระหว่างสเตเตอร์และโรเตอร์ เครื่องโรเตอร์กรงขาวเรียกอีกอย่างว่าเครื่องแยกหรือเครื่องทำงาน คำว่าอะซิงโครนัสมาจากข้อเท็จจริงที่ว่าความเร็วโรเตอร์ของเครื่องเหล่านี้ไม่ได้ถูกกำหนดโดยความถี่ของกระแสที่ไหลผ่านสเตเตอร์อย่างแน่นอน
ภาพที่ 1 แสดงตัวอย่างการออกแบบตัวเครื่อง รูปที่ 2 - ตัวอย่างของเครื่องโรเตอร์ที่มีองค์ประกอบปิดวงแหวน (แผนผัง) รูปที่ 3 - ตัวอย่างของโรเตอร์เครื่องที่มีองค์ประกอบปิดเป็นเกลียว (ตามแผนผัง); ในรูป 4 - ตัวอย่างวงจรขดลวดกระดองของเครื่องที่มีอัตราส่วน n c /f = 120 rpm Hz; รูปที่ 5 เป็นภาพขั้วของสนามแม่เหล็กของขดลวดตามรูปที่ 4 ในช่องว่างอากาศ (กวาดไปตามเส้นรอบวง) รูปที่ 6 เป็นมุมมองของเครื่องที่มีสเตเตอร์แบ่งออกเป็นสองส่วนจากส่วนท้ายเมื่อถอดเกราะออก รูปที่ 7 เป็นตัวอย่างของวงจรขดลวดกระดองสำหรับเครื่องที่มีสเตเตอร์แบ่งออกเป็นสองส่วนและอัตราส่วน n c /f = 120 rpm Hz (การสแกนแบบวงกลม) รูปที่ 8 เป็นตัวอย่างวงจรขดลวดกระดองที่มีอัตราส่วน n c /f = 240 rpm Hz
เครื่องซิงโครนัสประกอบด้วยส่วนที่หมุน โรเตอร์ และส่วนที่ตายตัวของสเตเตอร์ โรเตอร์อาจประกอบด้วยแม่เหล็กถาวรหรืออาจประกอบด้วยขดลวดด้วย กระแสตรงและวงจรแม่เหล็ก ในการสร้างกระแสจะใช้แรงภายนอกเพื่อหมุนโรเตอร์: สนามแม่เหล็กที่หมุนของมันทำให้เกิดกระแสสลับในขดลวดสเตเตอร์ ความเร็วของสนามหมุนนี้เรียกว่า "ความเร็วซิงโครไนซ์"
ตัวควบคุมความเร็วไฟฟ้า
ไดรฟ์แบบปรับความเร็วได้คืออุปกรณ์อิเล็กทรอนิกส์สำหรับควบคุมความเร็วและแรงบิดของมอเตอร์กระแสสลับโดยกำหนดความถี่และแรงดันที่ต้องการหรือกระแสอินพุต การใช้งานมีตั้งแต่เครื่องยนต์ที่เล็กที่สุดไปจนถึงใหญ่ที่สุด เช่น คอมเพรสเซอร์ อย่างไรก็ตาม ควรสังเกตว่าประมาณหนึ่งในสี่ของการใช้ไฟฟ้าของโลกนั้นคิดเป็นสัดส่วนโดยมอเตอร์ไฟฟ้าที่ใช้ในอุตสาหกรรม ไดรฟ์แบบปรับความเร็วได้จะไม่สปริงในขณะที่ลดการใช้พลังงาน
เครื่องอะซิงโครนัสที่มีโรเตอร์กรงกระรอกมีสเตเตอร์แบบเฟอร์โรแมกเนติก 1 (ดูรูปที่ 1) พร้อมขดลวดกระดองแบบหลายเฟส 2 (ในตัวอย่างของรูปที่ 1 - สามเฟส) และโรเตอร์ 3 สเตเตอร์ 1 ได้รับการแก้ไข ในตัวเรือน 4 และทำด้วยช่อง 5, 6 และ 7 ตามจำนวนเฟส A, B และ C ของขดลวด 2 ร่องถูกยกนูนตามแนวเกลียวตามแนวแกนของเครื่อง โดยพื้นฐานแล้ว ชั้นร่องฟันของสเตเตอร์เป็นแบบ multi-start (m คือแบบลีดอิน โดยที่ m คือจำนวนเฟสของขดลวดกระดอง) โครงสร้างขดลวด และเฟส A, B และ C ของขดลวด 2 ซึ่งอยู่ในร่องเกลียว 5, 6 และ 7 ตามลำดับ ถูกกระจายไปในแนวแกน โรเตอร์ 3 ในชั้นผิวแอกทีฟมีขดลวดลัดวงจรซึ่งประกอบด้วยแท่งแกนนำไฟฟ้า 8 กระจายรอบเส้นรอบวงและปิดแท่ง 8 องค์ประกอบ 9 กระจายในทิศทางตามแนวแกน เมื่อองค์ประกอบปิด 9 นี้สามารถสร้างเป็นวงแหวนได้ (ดูรูปที่ 2) ซึ่งค่อนข้างล้ำหน้าทางเทคโนโลยี นอกจากนี้ยังเป็นไปได้ที่จะสร้างองค์ประกอบปิด 9 ในรูปแบบของแท่งเกลียว (ดูรูปที่ 3) ซึ่งมีโครงสร้างที่ซับซ้อนมากขึ้นและมีความก้าวหน้าทางเทคโนโลยีน้อยกว่า แต่ให้ประสิทธิภาพของเครื่องจักรที่ดีขึ้นโดยการเพิ่มความเหนี่ยวนำร่วมกันของขดลวดสเตเตอร์และโรเตอร์ อันที่จริงร่องเกลียวสำหรับองค์ประกอบปิดดังกล่าวก่อให้เกิดโครงสร้างเกลียวหลายจุดของชั้นผิวของโรเตอร์ (ในตัวอย่าง รูปที่ 3 - หกเริ่ม) เครื่องพันเกลียว 2 เครื่องกระจายไปตามแนวแกนของส่วนที่ 10 (ดูรูปที่ 4) ซึ่งเชื่อมต่อกันในลักษณะปกติ ส่วนที่ 10 นั้นแท้จริงแล้วเป็นกึ่งม้วนโดยมีส่วนที่ใช้งานได้เป็นรูปเกลียว 11 เอียงตามแนวเกลียวและส่วนหน้าตรง 12 ส่วนหน้า 12 ถูกวางไว้ในร่อง 13 ที่ทำขึ้นเป็นพิเศษสำหรับพวกเขา (ดูรูปที่ 1) เนื่องจากเส้นแนวแกนของส่วนหน้าของขดลวดกระดอง (แกนสล็อต 13) เป็นขอบเขตของการเปลี่ยนแปลงอย่างกะทันหันในขั้วของสนามสเตเตอร์ (ดูรูปที่ 5) ซึ่งนำไปสู่การสร้างเบรก แรงบิดในเครื่อง จากนั้นเพื่อลดช่วงเวลาที่กำหนด ช่องว่างอากาศในบริเวณนี้จะไม่เท่ากันโดยการลดขนาดรัศมีของสเตเตอร์ (ดูรูปที่ 1)
ความเร็วในการหมุนของสนามสเตเตอร์
อย่างที่คุณจินตนาการได้ เครื่องยนต์แบบอะซิงโครนัสในปัจจุบันได้เปลี่ยนแปลงไปมากตั้งแต่การทำงานของผู้ที่มองไปที่เปลของพวกเขา อันที่จริง ความเป็นพ่อแม่ของเขาถูกแบ่งระหว่างวิศวกรที่มีความสามารถ 3 คน ซึ่งแต่ละคนต่างก็นำคุณค่าที่สำคัญมาผลิตอุปกรณ์ของเขา ซึ่งปัจจุบันได้รับความนิยมอย่างมากสำหรับวัตถุประสงค์ต่างๆ
โดยเฉพาะอย่างยิ่ง เราเป็นหนี้กับหลักการของสามเฟสที่ 120 ° ในที่สุด Mikhail Dolivo-Dobrovolsky จะนำความคิดทั้งสองมารวมกันและสร้างสามเฟสแรก a มอเตอร์ซิงโครนัสด้วยโรเตอร์กรงกระรอกซึ่งเราจะพูดถึงรายละเอียดเพิ่มเติมด้านล่าง เกิดจากการผสมผสานของความคิดนี้ที่เครื่องยนต์แบบอะซิงโครนัสถือกำเนิดขึ้น ซึ่งปรากฏอยู่ในทุกอุตสาหกรรมและสำหรับการใช้งานของผู้บริโภคในปัจจุบัน แต่ก็ไม่ชนะล่วงหน้า
เนื่องจากส่วนหน้า 12 ของขดลวดกระดองในโรเตอร์สร้างสนามสองขั้วซึ่งทำให้เกิดแรงบิดในการเบรกในเครื่องจากนั้นจึงลดหรือขจัดปรากฏการณ์ที่ไม่พึงประสงค์นี้ร่องแกน 13 ของสเตเตอร์จึงทำขึ้นโดยมีความลึกใกล้เคียง ค่าขนาดรัศมีของสเตเตอร์หรือผ่านการก่อตัวของช่อง (ดูเส้นประในพื้นที่ของร่อง 13 ในรูปที่ 1) จากมุมมองของความสามารถในการผลิตและการบำรุงรักษาอาจเป็นการแบ่งที่เหมาะสมของสเตเตอร์ 1 และขดลวดกระดอง 2 ช่องว่างตามแนวรัศมี 14 ตามยาวเป็นสองส่วน (รูปที่ 6) ขึ้นไป ในกรณีนี้ ส่วนของขดลวดสมอ 2 แต่ละส่วนประกอบด้วยสองส่วนที่ทำงาน 15 และส่วนหน้าสองส่วน 16 ซึ่งวางไว้ในช่วงเวลา 14 (ดูรูปที่ 6 และ 7) ในกรณีของการดำเนินการขององค์ประกอบปิด 9 ของขดลวดโรเตอร์ 3 (ดูรูปที่ 3) เพื่อให้แน่ใจว่าสูงสุด โมเมนต์แม่เหล็กไฟฟ้าเครื่องขอแนะนำให้ทำตามขั้นตอนของ "สกรู" ของร่องเกลียวของสเตเตอร์และโรเตอร์เหมือนกัน การผสมเครื่องนั้นเหมาะสมกับการจัดเรียงแผ่นตามแนวรัศมีตามแนวยาว การออกแบบเครื่องที่มีสเตเตอร์ภายนอกและโรเตอร์ภายในได้รับการอธิบายไว้ข้างต้น อย่างไรก็ตาม ยังเป็นไปได้ที่จะออกแบบด้วยสเตเตอร์ภายในและโรเตอร์ภายนอก ซึ่งอาจจะดีกว่าด้วยเหตุผลทางเทคโนโลยีหรือเหตุผลอื่นๆ
แม้จะมีความสะดวกและต้นทุนในการผลิตสูงและมีอัตราการใช้น้อย แต่มอเตอร์เหนี่ยวนำก็มีข้อเสียบางประการที่ทำให้การพัฒนาช้าลง ซึ่งบางครั้งก็ทำให้ได้เปรียบกับเทคโนโลยีซิงโครนัสกระแสหลักของคู่แข่ง ขับเคลื่อนโดยกระแสตรง มีแรงบิดเพียงเล็กน้อยเมื่อสตาร์ท ภายใต้เงื่อนไขเดียวกัน เขารู้วิธีส่งเฉพาะอัตราคงที่โดยไม่มีการเปลี่ยนแปลงใดๆ ที่เป็นไปได้ โชคดีที่ความก้าวหน้าทางเทคนิคเกี่ยวกับอุปกรณ์อิเล็กทรอนิกส์กำลังนำไปสู่การใช้หลักการของความถี่ตัวแปร แต่ยังรวมถึงการควบคุมการไหล เพื่อบังคับให้มีแรงบิดสูงแม้ตอนสตาร์ท เพื่อให้มอเตอร์เหนี่ยวนำสามารถดึงขึ้นล่วงหน้าได้อีกครั้ง
การประดิษฐ์นี้มีพื้นฐานมาจากแนวคิดในการรับความเร็วในการหมุนสูงในเครื่องอะซิงโครนัสที่ ความถี่ต่ำ ah ของแรงดันไฟฟ้า (มอเตอร์) และในทางกลับกัน ความถี่แรงดันต่ำที่ ความถี่สูงการหมุน (เครื่องกำเนิดไฟฟ้า) โดยการสร้างสนามแม่เหล็กแบบเกลียวตามแนวแกนซึ่งเคลื่อนที่ไปในแนวแกน การเคลื่อนที่ตามแนวแกนของสนามดังกล่าวสัมพันธ์กับวงจรโรเตอร์เบื้องต้นจะเท่ากับการหมุนของมัน (ดูรูปที่ 5) ในกรณีนี้ ขึ้นอยู่กับระยะพิทช์ของ "สกรู" ของสนาม การกระจัดตามแนวแกนโดยการแบ่งขั้วหนึ่งส่วนจะเท่ากับการหมุนด้วยจำนวนรอบที่แน่นอน ทั้งนี้ขึ้นอยู่กับระยะพิทช์ของ "สกรู" ของสนาม ตัวอย่างเช่น การย้ายสนามโดยการแบ่งขั้วหนึ่งด้วยสนาม "สกรู" เท่ากับการแบ่งขั้วจะเทียบเท่ากับการหมุนหนึ่งรอบด้วยขั้นตอน 0.5 - สองรอบ ฯลฯ เนื่องจากระยะพิทช์ของ "สกรู" ของสนามถูกกำหนดโดยระยะห่างของ "สกรู" ของขดลวดกระดอง (สล็อตสเตเตอร์) เท่านั้น - ค่าเหล่านี้มีค่าเท่ากัน - จากนั้นความสัมพันธ์ระหว่างความถี่แรงดันไฟฟ้า ฉ และความถี่การหมุนของสนามสเตเตอร์ (ความถี่การหมุนแบบซิงโครนัส) n c ถูกกำหนดจากเหตุผลต่อไปนี้
เนื่องจากมีการเปลี่ยนแปลงเล็กน้อย เนื่องจากในทางเทคนิค มีเพียงโรเตอร์เท่านั้นที่แตกต่างกัน เครื่องยนต์จะรองรับจำนวนเครื่องยนต์เท่ากัน ในท้ายที่สุด รถไฟความเร็วสูงจะได้รับประโยชน์จากการเพิ่มประสิทธิภาพที่ชัดเจนและกำลังเพิ่มขึ้นเล็กน้อยจาก 800kW เป็น 280kW
เช่นเดียวกับลูกพี่ลูกน้องของมอเตอร์ซิงโครนัส สเตเตอร์ประกอบด้วยขดลวด ซึ่งโดยทั่วไปจะมี 3 ซึ่งสลับกันโดยกระแสสลับจะทำให้เกิดสนามแม่เหล็กหมุน โรเตอร์ประกอบขึ้นจากตัวนำอะลูมิเนียมหรือทองแดงที่แข็งซึ่งติดตั้งในรูปแบบสั้นและตาหมากรุก จึงมีชื่อเล่นว่า "โรเตอร์กรงกระรอก"
การเคลื่อนที่ของสนามสเตเตอร์ด้วยระยะพิทช์ของ "สกรู" t B1 = ต่อการแบ่งขั้ว (เท่ากัน) สอดคล้อง (เท่ากัน) กับการหมุนของสนามหนึ่งรอบและเวลา 1/2f c = 1/20 f min โดยคำนึงถึงการพึ่งพาอาศัยกันตามสัดส่วนของการหมุนของสนามบนระยะห่างสัมพัทธ์ของ "สกรู" ของสนาม (ช่อง) ของสเตเตอร์ t B1 / ที่แสดงด้านบน ความถี่การหมุนของสนาม (ความถี่การหมุนแบบซิงโครนัส) ถูกกำหนดดังนี้: n c =120f/t B1 =120fn B1 rpm โดยที่ n B1 =/t B1 คือจำนวนรอบของช่องสเตเตอร์ต่อเสา
หากโรเตอร์อะลูมิเนียมหล่อขึ้นในโรงหล่อ โลหะผสมของทองแดงจะถูกชดเชยจนกระทั่งเมื่อไม่นานมานี้ด้วยเหตุผลทางเทคนิค ตอนนี้ เพื่อเพิ่มผลผลิต พวกเขายังผลิตในอุตสาหกรรม สนามแม่เหล็กหมุนของสเตเตอร์จะทำให้เกิดสนามแม่เหล็กเหนี่ยวนำในโรเตอร์ นอกจากนี้ คำว่า "motor armature" และ "motor rotor" ยังใช้ในลักษณะที่เท่าเทียมกัน โดยสนามแม่เหล็กหลังมีแนวโน้มที่จะตรงกับตัวบ่งชี้สเตเตอร์ แต่ไม่สามารถจับได้: นี่คือการเลื่อนหลุด
การเลือกเชิงกลยุทธ์ของผู้ผลิต
ดังนั้นความเร็วของโรเตอร์จะน้อยกว่าเวลาเสมอเมื่อวิ่งในสเตเตอร์ สถานการณ์นี้เองที่ทำให้มอเตอร์แบบอะซิงโครนัสมีชื่อ มอเตอร์เหนี่ยวนำน่าจะประหยัดที่สุดในการผลิต นอกจากนี้ยังเป็นอุตสาหกรรมที่มีค่าอุตสาหกรรมที่มีเสถียรภาพมากที่สุด เนื่องจากไม่มีแม่เหล็กในโรเตอร์ซึ่งทำจากแผ่นเหล็กแม่เหล็กและอลูมิเนียมและมักเป็นทองแดงน้อยกว่า
ในตัวอย่างที่พิจารณา โดยที่ n B1 =/t B1 =1 ที่ความถี่ f = 50 Hz n c = = 6000 rpm ซึ่งไม่สามารถจัดหาให้ในเครื่องอะซิงโครนัสได้ โดยการเปลี่ยน n B1 เป็นไปได้ที่จะบรรลุอัตราส่วนใดๆ n c /f
ควรสังเกตว่าในแง่ของกระบวนการทางกายภาพการทำงานของเครื่องในทุกโหมด (เครื่องยนต์, เครื่องกำเนิดไฟฟ้า, เบรค) ไม่แตกต่างจากการทำงานของเครื่องอะซิงโครนัสทั่วไปซึ่งโรเตอร์หมุนด้วยสลิปที่สัมพันธ์กับสเตเตอร์ที่หมุน สนาม.
โหมดการทำงานของเครื่องอะซิงโครนัส
มีความต้องการเพิ่มขึ้นอย่างมาก วัตถุดิบซึ่งประกอบเป็นแม่เหล็กที่ทรงพลังที่สุด เป็นข้อได้เปรียบด้านเสถียรภาพด้านราคาที่แน่นอน - "แรร์เอิร์ธ" เหล่านี้มีชื่อไม่ดีมาก “แผ่นดิน” เป็นประวัติศาสตร์ ตัวมันเองมีการปรับตัวที่ไม่ดีอยู่แล้ว เหล่านี้เป็นแร่ธาตุที่ค่อนข้างแพร่หลายบนโลก
สิ่งที่เป็นปัญหาและอธิบายราคาขององค์ประกอบเหล่านี้คือปริมาณขององค์ประกอบเหล่านี้ต่ำมากเนื่องจากการฝากเงิน กล่าวโดยย่อ มีอยู่มากมายบนดาวเคราะห์สีน้ำเงินของเรา แต่มีอยู่ทั่วไปในเส้นเลือดเล็กๆ ทำให้มีราคาแพงมากที่จะเอารัดเอาเปรียบ
เนื่องจากความเรียบง่ายและความน่าเชื่อถือ เช่นเดียวกับความเป็นไปได้ที่จะได้รับความเร็วสูงในทางทฤษฎีที่ความถี่ไฟต่ำและแรงดันไฟฟ้าของความถี่ต่ำใดๆ ที่ความเร็วสูง เครื่องจักรที่เสนอในฐานะเครื่องยนต์สามารถหาได้ ประยุกต์กว้างในไดรฟ์ไฟฟ้าสำหรับใช้ในครัวเรือน (เครื่องผสม เครื่องบดกาแฟ เครื่องเป่าผม ฯลฯ) แทนมอเตอร์สะสมที่ไม่น่าเชื่อถือ เช่นเดียวกับในไดรฟ์ไฟฟ้าความเร็วสูงอุตสาหกรรมขนาดกลางและขนาดใหญ่ (เครื่องนวดข้าว เครื่องหมุนเหวี่ยง ฯลฯ) ซึ่งสามารถใช้ตัวแปลงความถี่ได้ ไม่รวมและเป็นเครื่องกำเนิดไฟฟ้า - ในโรงไฟฟ้าที่มีไดรฟ์ความเร็วสูง (กังหัน) ซึ่งไม่รวมตัวลดขนาด
รูปที่ 2 โรเตอร์กรงกระรอก
นอกจากนี้ การใช้งานยังทำให้เป็นแหล่งยุทธศาสตร์ทางภูมิศาสตร์ที่ทุกคนพยายามจะยึดครองในประเทศต่างๆ ซึ่งบางแห่งไม่มีระบอบประชาธิปไตยที่มั่นคง นี่คือเหตุผลที่ผู้ผลิตเครื่องยนต์กำลังมองหาการจำกัดหรือแจกจ่ายดินที่หายากเหล่านี้มากขึ้นเรื่อยๆ
มอเตอร์เหนี่ยวนำไม่ใช้แม่เหล็ก ดังนั้นจึงมีภูมิคุ้มกันต่อปัญหาแรร์เอิร์ธและสามารถอ้างได้ว่าถูกที่สุดในการผลิตชุดอุปกรณ์ไฟฟ้าทั้งหมด แต่ยังมีความคล้ายคลึงกัน เพราะถ้าตัวมอเตอร์เองไม่แพง ก็ไม่สามารถพูดได้เหมือนกันสำหรับอุปกรณ์อิเล็กทรอนิกส์ที่จำเป็นในการจัดการการเปลี่ยนแปลงความเร็ว วัสดุที่จำเป็นนี้ ยกเว้นการใช้งานในความเร็วคงที่สามเฟส ทั่วโลกสูญเสียความได้เปรียบทางการเงินของโซลูชันแบบอะซิงโครนัส
1. ASYNCHRONOUS MACHINE ที่มี ROTOR แบบปิดสั้น ซึ่งประกอบด้วยสเตเตอร์ที่มีแกนเฟอร์โรแมกเนติกที่มีชั้นผิวแอคทีฟทรงกระบอกที่มีร่องและขดลวดแบบหลายเฟสวางอยู่ในนั้น และโรเตอร์มีศูนย์กลางกับสเตเตอร์ที่มีแกนเฟอร์โรแมกเนติกและเป็นสื่อนำไฟฟ้า แกนแกนในชั้นผิวแอกทีฟและองค์ประกอบปิดของแท่งซึ่งมีลักษณะเฉพาะว่า เพื่อที่จะขยายขอบเขตโดยให้อัตราส่วนของความเร็วในการหมุนต่อความถี่แรงดันไฟฟ้าที่กำหนดในขณะที่ยังคงความเรียบง่ายและความน่าเชื่อถือ ช่องสเตเตอร์จะทำมุมเอียงตามแนวแกน เส้นทางเกลียวไปตามแกนของเครื่องและขดลวดสเตเตอร์และแท่งปิดขององค์ประกอบโรเตอร์จะกระจายไปในทิศทางตามแนวแกนและวางโรเตอร์ขององค์ประกอบปิดในชั้นพื้นผิวที่ทำงานอยู่
ในรถยนต์ไฟฟ้าไม่สามารถลื่นไถลได้ หลังจากที่คุณดำเนินการอย่างละเอียดแล้ว การออกแบบนี้แสดงให้เห็นถึงประสิทธิภาพที่น่าทึ่งมากว่าศตวรรษ หากสามารถเลี้ยวด้วยความเร็วสูง ก็สามารถให้แรงบิดที่สำคัญมากตั้งแต่เริ่มต้น ทำให้เหมาะสำหรับระบบขับเคลื่อนไฟฟ้า
ในทางกลับกัน เครื่องยนต์ความร้อนจะไม่สามารถแม้แต่จะออกมาพร้อมกับต้นทุนการผลิตที่สูงขึ้น การซ่อมบำรุงและการบริโภคซึ่งจะแสดงให้เห็นอย่างชัดเจนในความไม่ชอบของเขา ลักษณะเฉพาะ มอเตอร์เหนี่ยวนำรถเปิดประทุน? การออกแบบทั้งหมดมุ่งสู่การบรรลุประสิทธิภาพและประสิทธิภาพสูงสุด ดังนั้นก้านสูบของโรเตอร์จึงทำจากทองแดง มันไม่ได้เป็นสิ่งที่แปลกใหม่ ยกเว้นว่าที่นี่ทองแดงถูกหล่อด้วยแรงดันในโรงหล่อบนโรเตอร์โดยตรง
2. เครื่องตามข้อถือสิทธิข้อที่ 1 มีลักษณะเฉพาะว่าแท่งปิดขององค์ประกอบโรเตอร์ทำในรูปแบบของวงแหวนที่อยู่ในร่องวงแหวนที่ทำในแกนตั้งฉากกับแกนของเครื่อง
3. เครื่องตามข้อถือสิทธิข้อที่ 1 มีลักษณะเฉพาะว่าแท่งปิดขององค์ประกอบโรเตอร์ทำขึ้นในรูปแบบของแท่งเกลียวที่วางอยู่ในร่องที่ทำเป็นแนวเฉียงตามแนวเกลียวตามแกนของเครื่อง และต่อด้วยไฟฟ้ากับแกน แท่งที่จุดสี่แยกกับพวกเขา
การออกแบบเครื่องจักรอะซิงโครนัสด้วยโรเตอร์กรงกระรอก
นี่คือมูลค่าปัจจุบันในแง่ของคุณภาพของผลิตภัณฑ์ แผ่นพับเพื่อสร้างสเตเตอร์และโรเตอร์มีความบางเป็นพิเศษและมีจำนวนมากขึ้นเพื่อลดการสูญเสียกระแสน้ำวน ที่เกิดจากสนามแม่เหล็กจะนำไปสู่การสูญเสียพลังงานหากประกอบจากเหล็กก้อนเดียว
เราเข้าใจถึงประสิทธิภาพและสมรรถนะที่ดีที่สุดจากโซ่ลากแบบธรรมดาของรถเปิดประทุนคันนี้ ด้วยความก้าวหน้าอย่างต่อเนื่องทุกปี ประสิทธิภาพของมอเตอร์เหนี่ยวนำอยู่ที่ประมาณ 88% เมื่อรถสปอร์ตที่ดีที่สุดที่มีเครื่องยนต์สันดาปภายในที่ล้ำสมัยแทบจะไม่ถึง 30%
4. เครื่องตามข้อถือสิทธิข้อที่ 1 ถึง 3 มีลักษณะเฉพาะว่าขดลวดสเตเตอร์ทำจากส่วนต่างๆ ซึ่งแต่ละส่วนประกอบด้วยส่วนที่ใช้งานเป็นเกลียวและส่วนหน้าตรง และส่วนหน้าของส่วนต่างๆ จะวางอยู่ในร่องตามแนวแกน ทำในสเตเตอร์
5. เครื่องตามข้อถือสิทธิข้อที่ 1 ถึง 4 มีลักษณะเฉพาะว่าช่องว่างอากาศตามเส้นรอบวงของสเตเตอร์เจาะในบริเวณส่วนหน้าของขดลวดสเตเตอร์นั้นไม่สม่ำเสมอโดยการลดขนาดรัศมีของสเตเตอร์
6. เครื่องตามข้อถือสิทธิข้อที่ 1 ถึง 5 มีลักษณะเฉพาะตรงที่ร่องแกนของสเตเตอร์ทำด้วยความลึกใกล้เคียงกับขนาดเรเดียลของสเตเตอร์ หรือผ่านในทิศทางแนวรัศมีด้วยการก่อตัวของช่อง
รูปแบบโครงสร้างของการทำงานของเครื่องจักรไฟฟ้า
ข้อมูลพื้นฐานเกี่ยวกับมอเตอร์อะซิงโครนัสอนุกรม
โหมดการทำงานของเครื่องอะซิงโครนัส
หลักการทำงานของเครื่องอะซิงโครนัส
อุปกรณ์ของเครื่องอะซิงโครนัส
บรรยาย #2
ระบบนำทาง
สาขาอีร์คุตสค์ของ MSTU GA
อีร์คุตสค์ 2550
เครื่องจักรไฟฟ้าแบบอะซิงโครนัส
รถยนต์ไฟฟ้า
บรรยาย #9
และการบินและระบบนำทาง
ภาควิชาระบบไฟฟ้าการบิน
สาขาอีร์คุตสค์
การบินพลเรือน
มหาวิทยาลัยเทคนิคแห่งรัฐมอสโก
ตามระเบียบวินัย
สำหรับนักศึกษาพิเศษ 160903
เก้าอี้ ระบบไฟฟ้าการบินและการควบคุมการบิน
อนุมัติ
หัวหน้าภาควิชาโรงไฟฟ้านิวเคลียร์และ ป.ป.ช
ผู้สมัครสาขาวิทยาศาสตร์เทคนิค รองศาสตราจารย์ Mishin S.V.
« 14 » มาร์ธา 2008 ก.
ตามระเบียบวินัย: รถยนต์ไฟฟ้า
หัวข้อบรรยาย: เครื่องจักรไฟฟ้าแบบอะซิงโครนัส (2 ชั่วโมง)
วรรณกรรม
1. Kopylov B.V. รถยนต์ไฟฟ้า. ม., 2531
โรคเอดส์ แอป พลิเค TCO
1. การติดตั้งมัลติมีเดีย
หารือในที่ประชุมของภาควิชา
« 14 » มาร์ธา 2008 เมือง หมายเลขโปรโตคอล 8/07
เครื่องอะซิงโครนัสประกอบด้วยสองส่วนหลักที่คั่นด้วยช่องว่างอากาศ: สเตเตอร์แบบอยู่กับที่และโรเตอร์หมุน แต่ละส่วนเหล่านี้มีแกนและขดลวด ในกรณีนี้ ขดลวดสเตเตอร์เชื่อมต่อกับเครือข่ายและเป็นไปตามที่เคยเป็นมา และขดลวดของโรเตอร์เป็นเรื่องรอง เนื่องจากพลังงานเข้ามาจากขดลวดสเตเตอร์เนื่องจากการเชื่อมต่อทางแม่เหล็กระหว่างขดลวดเหล่านี้
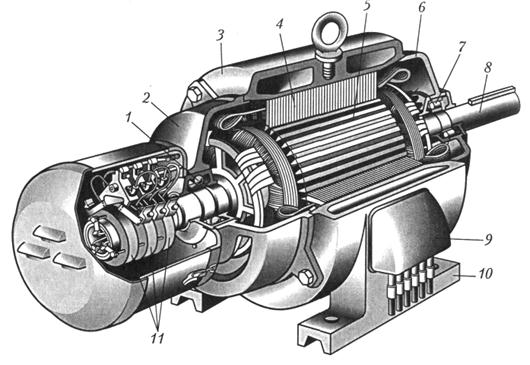
ตามการออกแบบ มอเตอร์แบบอะซิงโครนัสแบ่งออกเป็นสองประเภท: มอเตอร์ที่มีโรเตอร์แบบกรงกระรอกและมอเตอร์ที่มีเฟสโรเตอร์ พิจารณาอุปกรณ์ของมอเตอร์แบบอะซิงโครนัสสามเฟสที่มีโรเตอร์กรงกระรอก (รูปที่ 1) เครื่องยนต์ประเภทนี้นิยมใช้กันมากที่สุด
รูปที่ 1 อุปกรณ์ของมอเตอร์แบบอะซิงโครนัสสามเฟสพร้อมโรเตอร์กรงกระรอก:
1, 11 - แบริ่ง; 2 - เพลา; 3, 9 - โล่แบริ่ง; 4 - กล่องขั้ว; 5 - แกนโรเตอร์ที่มีขดลวดลัดวงจร 6 - แกนสเตเตอร์พร้อมขดลวด 7 - ร่างกาย; 8 - ขดลวดสเตเตอร์; 10 - แฟน; 12 - ปลอกพัดลม; 13 - พื้นผิวซี่โครงด้านนอกของร่างกาย; 14 - อุ้งเท้า; 15 - กลอนกราวด์
ส่วนที่อยู่กับที่ของเครื่องยนต์ - สเตเตอร์ - ประกอบด้วยตัวเรือน 7 และแกน 6 พร้อม ขดลวดสามเฟส 8. ตัวเรือนเครื่องยนต์หล่อจากโลหะผสมอลูมิเนียมหรือเหล็กหล่อหรือทำด้วยการเชื่อม เครื่องยนต์ที่พิจารณามีการออกแบบแบบปิด ดังนั้นพื้นผิวของร่างกายจึงมีซี่โครงตามยาวจำนวนหนึ่งซึ่งมีวัตถุประสงค์เพื่อเพิ่มพื้นผิวการระบายความร้อนของเครื่องยนต์
ในตัวเรือนมีแกนสเตเตอร์ 6 ซึ่งมีโครงสร้างเป็นลามิเนต: แผ่นเหล็กไฟฟ้าแผ่นบางที่มีความหนาปกติ 0.5 มม. ประทับตราด้วยชั้นเคลือบฉนวนประกอบในแพ็คเกจและยึดด้วยวงเล็บพิเศษหรือตามยาว เชื่อมตามพื้นผิวด้านนอกของบรรจุภัณฑ์ การออกแบบแกนกลางนี้มีส่วนช่วยในการลดกระแสน้ำวนที่เกิดขึ้นในระหว่างการทำให้เป็นแม่เหล็กอีกครั้งของแกนกลางด้วยการหมุน สนามแม่เหล็ก. บนพื้นผิวด้านในของแกนสเตเตอร์มีร่องตามยาวซึ่งมีส่วนที่เป็นร่องของขดลวดสเตเตอร์ซึ่งเชื่อมต่อตามลำดับโดยส่วนหน้าที่อยู่นอกแกนกลางที่ด้านปลาย
ในรูสเตเตอร์มีส่วนที่หมุนได้ของเครื่องยนต์ - โรเตอร์ประกอบด้วยเพลา 2 และแกน 5 ที่มีขดลวดลัดวงจร ขดลวดดังกล่าวเรียกว่า "ล้อกระรอก" เป็นชุดของแท่งโลหะ (อลูมิเนียมหรือทองแดง) ที่อยู่ในร่องของแกนโรเตอร์ซึ่งปิดทั้งสองด้านด้วยวงแหวนลัดวงจร (รูปที่ 2, a) แกนโรเตอร์ยังมีโครงสร้างเป็นลามิเนต แต่แผ่นโรเตอร์ไม่ได้เคลือบด้วยวานิชที่เป็นฉนวน แต่มีฟิล์มออกไซด์บางๆ อยู่บนพื้นผิว นี่เป็นฉนวนที่เพียงพอในการจำกัดกระแสน้ำวน เนื่องจากขนาดของมันมีขนาดเล็กเนื่องจากความถี่ต่ำของการพลิกกลับของการทำให้เป็นแม่เหล็กของแกนโรเตอร์ ตัวอย่างเช่น ที่ความถี่เมน 50 Hz และสลิปเล็กน้อย 6% ความถี่ remagnetization ของแกนโรเตอร์คือ 3 Hz
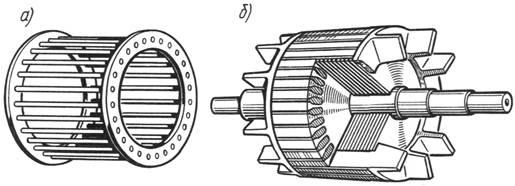
รูปที่ 2 โรเตอร์กรงกระรอก:
a - คดเคี้ยว "กรงกระรอก"; b - โรเตอร์ที่มีขดลวดทำโดยการฉีดขึ้นรูป
การหมุนโรเตอร์กรงกระรอกในมอเตอร์ส่วนใหญ่ทำได้โดยการหล่อแกนโรเตอร์ที่ประกอบขึ้นด้วยโลหะผสมอะลูมิเนียมหลอมเหลว ในเวลาเดียวกัน วงแหวนลัดวงจรและใบพัดระบายอากาศถูกหล่อพร้อมกันกับแท่งที่คดเคี้ยว (รูปที่ 2, b)
เพลาโรเตอร์หมุนในตลับลูกปืนกลิ้ง 1 และ 11 ซึ่งอยู่ในส่วนป้องกันตลับลูกปืน 3 และ 9
เครื่องยนต์ถูกทำให้เย็นลงโดยการเป่าที่พื้นผิวครีบด้านนอกของตัวเครื่อง 13 การไหลของอากาศถูกสร้างขึ้นโดยพัดลมแบบแรงเหวี่ยง 10 ที่หุ้มด้วยปลอก 12 ที่พื้นผิวด้านท้ายของปลอกนี้มีรูสำหรับรับอากาศ มอเตอร์ที่มีกำลังตั้งแต่ 15 กิโลวัตต์ขึ้นไป นอกจากมอเตอร์แบบปิดแล้ว ยังสร้างรุ่นที่มีการป้องกันด้วยการระบายอากาศในตัว ในโล่แบริ่งของมอเตอร์เหล่านี้มีรู (มู่ลี่) ซึ่งอากาศจะถูกขับผ่านช่องภายในของมอเตอร์โดยใช้พัดลม ในกรณีนี้ อากาศจะ "ล้าง" ชิ้นส่วนที่ให้ความร้อน (ขดลวด แกนกลาง) ของเครื่องยนต์ และการระบายความร้อนจะมีประสิทธิภาพมากกว่าการเป่าลมจากภายนอก
ปลายของขดลวดเฟสถูกนำออกมาที่ขั้วของกล่องขั้วต่อ 4. โดยปกติ มอเตอร์แบบอะซิงโครนัสได้รับการออกแบบให้รวมอยู่ใน เครือข่ายสามเฟสสำหรับแรงดันไฟฟ้าที่แตกต่างกันสองแบบ ซึ่งแตกต่างกันตามปัจจัย ตัวอย่างเช่น มอเตอร์ได้รับการออกแบบให้เชื่อมต่อกับเครือข่ายสำหรับแรงดันไฟฟ้า 380/660 V. ถ้าเครือข่าย แรงดันไฟฟ้า 660 V ขดลวดสเตเตอร์ควรเชื่อมต่อกับดาวและถ้าเป็น 380 V ให้ใช้รูปสามเหลี่ยม ในทั้งสองกรณี แรงดันไฟฟ้าบนขดลวดของแต่ละเฟสจะเท่ากับ 380 โวลต์ ข้อสรุปของขดลวดเฟสจะถูกวางไว้บนแผงในลักษณะที่สะดวกในการต่อขดลวดเฟสโดยใช้จัมเปอร์โดยไม่ต้องข้ามส่วนหลัง (รูปที่ 3). ในมอเตอร์กำลังต่ำบางรุ่น จะมีแคลมป์เพียงสามตัวในกล่องขั้วต่อ ในกรณีนี้ มอเตอร์สามารถเชื่อมต่อกับเครือข่ายสำหรับหนึ่งแรงดันไฟฟ้า (การเชื่อมต่อของขดลวดสเตเตอร์ของมอเตอร์ดังกล่าวที่มีดาวหรือเดลต้าถูกสร้างขึ้นภายในมอเตอร์)

รูปที่ 3 ตำแหน่งของขั้วขดลวดสเตเตอร์ (a) และตำแหน่งของจัมเปอร์
เมื่อเชื่อมต่อสเตเตอร์ที่คดเคี้ยวกับดาวและสามเหลี่ยม (b)
เครื่องยนต์ติดตั้งที่จุดติดตั้งโดยใช้ขา 14 (ดูรูปที่ 1) หรือโดยใช้หน้าแปลน ในกรณีหลัง หน้าแปลนถูกสร้างขึ้นบนแผ่นบังลูกปืน (โดยปกติอยู่ที่ด้านข้างของปลายเพลาที่ยื่นออกมา) โดยมีรูสำหรับติดตั้งเครื่องยนต์บนเครื่องทำงาน เพื่อปกป้องบุคลากรปฏิบัติการจากการบาดเจ็บที่อาจเกิดขึ้น ไฟฟ้าช็อตมอเตอร์มาพร้อมกับกราวด์กราวด์ 15 (อย่างน้อยสองตัว) แผนภูมิวงจรรวมการรวมในเครือข่ายสามเฟสของมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอกแสดงในรูปที่ 4, a.
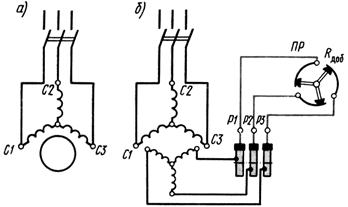
รูปที่ 4 แผนผังของการรวมมอเตอร์แบบอะซิงโครนัสสามเฟสกับโรเตอร์กรงกระรอก (a) และเฟส (b) โรเตอร์
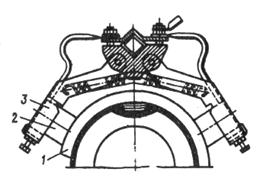
มอเตอร์แบบอะซิงโครนัสสามเฟสอีกประเภทหนึ่ง - มอเตอร์ที่มีเฟสโรเตอร์ - โครงสร้างแตกต่างจากมอเตอร์ที่พิจารณาส่วนใหญ่ในอุปกรณ์โรเตอร์ (รูปที่ 5) สเตเตอร์ของมอเตอร์นี้ยังประกอบด้วยตัวเรือน 3 และแกน 4 พร้อมขดลวดสามเฟส มีเกราะป้องกันแบริ่ง 2 และ 6 พร้อมตลับลูกปืนกลิ้ง 1 และ 7 ฟุต 10 และกล่องขั้วต่อ 9 ติดอยู่กับตัวเครื่อง 3 อย่างไรก็ตาม โรเตอร์มีการออกแบบที่ซับซ้อนมากขึ้น แกนเคลือบ 5 ที่มีขดลวดสามเฟสจับจ้องอยู่ที่เพลา 8 คล้ายกับขดลวดสเตเตอร์ ขดลวดนี้เชื่อมต่อด้วยดาวและปลายเชื่อมต่อกับวงแหวนเลื่อนสามอัน 11 ซึ่งอยู่บนเพลาและแยกออกจากกันและจากเพลา เพื่อให้มีการสัมผัสทางไฟฟ้ากับการหมุนของโรเตอร์ที่หมุนอยู่ แหวนลื่นแต่ละอัน 1 (รูปที่ 6) มักจะมีแปรง 2 อัน 2 วางไว้ในที่ยึดแปรง 3. ที่จับแปรงแต่ละอันมีสปริงที่ช่วยให้แน่ใจว่าแปรงถูกกดเข้ากับแหวนสลิป ด้วยแรงบางอย่าง
มอเตอร์เหนี่ยวนำที่มีเฟสโรเตอร์มีความซับซ้อนและเชื่อถือได้น้อยกว่า แต่มีคุณสมบัติในการควบคุมและการสตาร์ทได้ดีกว่ามอเตอร์ที่มีโรเตอร์แบบกรงกระรอก แผนผังของการรวมในเครือข่ายสามเฟสของมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์แสดงในรูปที่ 4, b. ขดลวดโรเตอร์ของมอเตอร์นี้เชื่อมต่อกับลิโน่สตาร์ท ฯลฯ ซึ่งสร้างความต้านทานเพิ่มเติมในวงจรโรเตอร์ R ต่อ .
แผ่นยึดติดอยู่กับตัวมอเตอร์แบบอะซิงโครนัส ซึ่งระบุประเภทของมอเตอร์ ผู้ผลิต ปีที่ผลิต และข้อมูลที่ระบุ (กำลังสุทธิ แรงดันไฟฟ้า กระแส ตัวประกอบกำลัง ความเร็ว และประสิทธิภาพ)
รูปที่ 5 อุปกรณ์ของมอเตอร์แบบอะซิงโครนัสสามเฟสพร้อมโรเตอร์เฟส:
1, 7 - แบริ่ง; 2, 6 - โล่แบริ่ง; 3 - ร่างกาย; 4 - แกนสเตเตอร์พร้อมขดลวด 5 – แกนโรเตอร์; 8 - เพลา; 9 - กล่องขั้ว; 10 - อุ้งเท้า; 11 - วงแหวนติดต่อ
เราแนะนำให้คุณอ่าน
 ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น
ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่
การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่ การวินิจฉัยการรักษาการรักษา urogenital chlamydia") Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia
Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร
ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร

