มอเตอร์ไฟฟ้าเป็นแรงขับเคลื่อนหลักของไดรฟ์ไฟฟ้า บทความนี้จะอธิบายเกี่ยวกับการเลือกมอเตอร์ไฟฟ้าสำหรับกลไกเชิงเส้น
| ประเภทของเครื่องกลไฟฟ้า | รวมประเภทเครื่องยนต์ |
| ATL 10, BSA 10 |
มีและไม่มีเบรก |
|
AC 1 เฟส, AC 3 เฟส, DS 24/12 V มีและไม่มีเบรก |
|
|
ไฟฟ้ากระแสสลับ 3 เฟส มีและไม่มีเบรก |
|
| UAL 0 UBA 0 | DS 24 V 12 V มีและไม่มีเบรก |
|
AC 1 เฟส, AC 3 เฟส, DS 24/12 V มีและไม่มีเบรก |
ลักษณะทางเทคนิคหลัก
ก่อนเลือกมอเตอร์ จำเป็นต้องเข้าใจลักษณะทางกายภาพดังต่อไปนี้:
กำลังไฟพิกัด - พลังงานกลซึ่งวัดบนเพลาแสดงเป็นหน่วยวัตต์หรือกิโลวัตต์ อย่างไรก็ตาม ในบางผลิตภัณฑ์ กำลังคำนวณเป็นแรงม้า
แรงดันไฟฟ้าที่กำหนด - แรงดันไฟฟ้าที่ต้องใช้กับขั้วมอเตอร์ตามข้อกำหนด
แรงบิดคงที่(แรงบิดเริ่มต้น) คือแรงบิดขั้นต่ำที่มอเตอร์สามารถให้ได้ โดยที่โรเตอร์ไม่ได้ใช้งานและที่แรงดันไฟฟ้าความถี่ที่กำหนด
แรงบิดปานกลาง- ค่าต่ำสุดของแรงบิดที่พัฒนาจากการจ่ายมอเตอร์ด้วยแรงดันไฟฟ้าและความถี่ที่กำหนด จาก 0 รอบต่อนาทีเป็นความเร็วที่สอดคล้องกับแรงบิดสูงสุด
แรงบิดสูงสุด - ช่วงเวลาสูงสุดซึ่งมอเตอร์สามารถพัฒนาได้ระหว่างการทำงานโดยใช้แรงดันไฟฟ้าและความถี่ที่กำหนด
พิกัดแรงบิด- แรงบิดสอดคล้องกับกำลังรับการจัดอันดับและความเร็วที่กำหนด
แรงบิดที่กำหนดคำนวณโดยใช้สูตร:
Pn - กำลังไฟพิกัด kW
n- จำนวนรอบที่กำหนด rpm
ความเร็วซิงโครนัสคำนวณจากการติดตาม สูตร:
![]()
f - ฟีดความถี่ Hz
p - จำนวนคู่ของเสา
แผนภาพแรงบิด

สภาพการใช้งาน
ความชื้น - อุปกรณ์ไฟฟ้าต้องทำงานที่ความชื้นสัมพัทธ์ 30% ถึง 90% (ไม่กลั่นตัว)
จำเป็นต้องกำจัดผลกระทบด้านลบจากการควบแน่นโดยไม่ได้ตั้งใจโดยใช้ตู้ป้องกันของอุปกรณ์ไฟฟ้า หรือหากจำเป็น ให้ใช้มาตรการเพิ่มเติม (เช่น อุปกรณ์ทำความร้อนในตัวหรือระบบปรับอากาศ รูระบายน้ำ)
ระดับความสูงและอุณหภูมิที่ระบุในแคตตาล็อกพลังงานมีไว้สำหรับการใช้งานปกติที่ระดับความสูงต่ำกว่า 1,000 เมตรเหนือระดับน้ำทะเล และที่อุณหภูมิห้องตั้งแต่ +5 °C ถึง +40 °C สำหรับมอเตอร์ที่มีกำลังไฟต่ำกว่า 0.6 kW หรือที่อุณหภูมิ ตั้งแต่ -15 °C ถึง 40 °C สำหรับมอเตอร์ที่มีกำลังไฟพิกัดเท่ากับหรือมากกว่า 0.6 กิโลวัตต์ ภายใต้สภาวะการทำงานอื่นๆ (ระดับความสูงและ/หรืออุณหภูมิที่สูงขึ้น) ค่าจะเปลี่ยนไปตามค่าสัมประสิทธิ์ที่แสดงบนกราฟ

มอเตอร์สามเฟสหรือเฟสเดียวมีทิศทางการเคลื่อนที่ตามเข็มนาฬิกา ทวนเข็มนาฬิกา - ตามคำขอ
แรงดันไฟฟ้า - ความถี่: การเปลี่ยนแปลงสูงสุดของการจ่ายแรงดันไฟ +/-10% ด้วยพิกัดความเผื่อนี้ มอเตอร์จะจ่ายกำลังไฟฟ้าตามพิกัด การทำงานระยะยาวภายในขีดจำกัดเหล่านี้อาจทำให้อุณหภูมิเพิ่มขึ้น 10 องศาเซลเซียส ขดลวดมาตรฐานได้รับการจัดอันดับสำหรับ 230/400V, 50Hz แรงดันไฟฟ้าความถี่อื่น ๆ สามารถขอได้
ความเร็ว - แรงบิด: ยกเว้นรุ่นสี่ขั้ว มอเตอร์เป็นอุปกรณ์มาตรฐาน ไม่แนะนำให้ใช้แรงบิดที่สูงกว่าพิกัดที่กำหนด
ขดลวดสเตเตอร์ทำด้วยอีนาเมล ลวดทองแดง(คลาส H, 200 องศา) โดยมีโพลิเอไมด์อีเทอร์โพลีเอไมด์ดัดแปลง
ฉนวนคลาส F เคลือบด้วยโพลีเมอร์ ซึ่งให้การป้องกันความเครียดจากไฟฟ้าสถิตและความเค้นเชิงกลในระดับสูง ขดลวดมีความแน่น ไม่มีช่องลมและการถ่ายเทความร้อนในระดับสูง วัสดุอื่น ๆ ที่ใช้ในการผลิตขดลวดจำนวนมากมีฉนวนคลาส B แต่เราใส่คลาส H ตามคำขอ
มอเตอร์เขตร้อนและทางทะเล: การป้องกันระดับสูง ซึ่งใช้สำหรับมอเตอร์ที่ทำงานในสภาพอากาศเขตร้อนที่มีความชื้นสูงและสภาพการทำงานที่ไม่เอื้ออำนวย ขดลวดเคลือบด้วยชั้นของกลีเซอโรฟทาลิกคุณภาพสูง ซึ่งมีคุณสมบัติในการป้องกันที่ดีเยี่ยม
| ยี่ห้อ | รูปภาพ | ประเภทของ | แรงดันและความถี่ | ช่วงของขนาดและความสามารถ | หมายเหตุ |
| เอ็ม | อะซิงโครนัส มอเตอร์ไฟฟ้าสามเฟสการออกแบบอุตสาหกรรมทั่วไป |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V รอบต่อนาที: 3000/1500/1000/750 |
ขนาดมม.: 50-160 กำลัง, กิโลวัตต์: 0.02-18.7 |
ขนาด 71-160 ปรับให้เหมาะกับการใช้งาน ด้วยการควบคุมความถี่ พัดลมเพลา ระดับการป้องกัน IP 55F |
|
| ป. | มอเตอร์ไฟฟ้าหลายจังหวะแบบอะซิงโครนัสสามเฟส |
V/Hz: 400/50 +/- 10%V 3000/1000, 3000/750, 1000/750, 3000/750 |
ขนาดมม.: 63-160 กำลัง, กิโลวัตต์: 0.06-18.7 |
พัดลมเพลามอเตอร์ ระดับการป้องกัน IP55F | |
| MQ | มอเตอร์ไฟฟ้าสามเฟสแบบอะซิงโครนัสพร้อมปลอกสี่เหลี่ยม |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V รอบต่อนาที: 1500 |
ขนาดมม.: 63-90 กำลัง, กิโลวัตต์: 0.18-1.5 |
ขนาด 80-90 ถูกดัดแปลงเพื่อใช้กับการควบคุมความถี่ พัดลมเพลา ระดับการป้องกัน IP55F |
|
| MM | อะซิงโครนัส มอเตอร์ไฟฟ้าเฟสเดียวด้วยตัวเก็บประจุในตัว |
V/Hz: 230/50 +/- 5%V รอบต่อนาที: 3000/1500/1000 |
ขนาดมม.: 50-100 กำลัง, กิโลวัตต์: 0.045 - 2.2 |
พัดลมเพลา. ระดับการป้องกัน IP55F จัดส่งพร้อมติดตั้งในตัว หรือตัวเก็บประจุแบบเสียบ |
|
|
พร้อมรีเลย์ตัดกระแสไฟ |
V/Hz: 230/50 +/- 5%V รอบต่อนาที:3000/1500/1000 |
ขนาดมม.: 63-100 กำลัง, กิโลวัตต์: 0.187 - 2.2 |
การระบายอากาศแบบบังคับ ระดับการป้องกัน IP55F มาพร้อมกับหรือ ตัวเก็บประจุแบบเสียบ สวิตช์แรงเหวี่ยง รีเลย์จ่ายไฟ/รีเลย์ปิดในตัว |
||
| MDE | มอเตอร์ไฟฟ้าเฟสเดียวแบบอะซิงโครนัสพร้อมรีเลย์อิเล็กทรอนิกส์ในตัว |
V/Hz: 230/50 +/- 5%V รอบต่อนาที: 3000/1500/1000 |
ขนาดมม.: 63-100 กำลัง, กิโลวัตต์: 0.187 - 2.2 |
พัดลมเพลา. ระดับการป้องกัน IP55F มาพร้อมกับคอนเดนเซอร์ในตัวหรือที่แนบมา พร้อมกับรีเลย์สตาร์ทแบบอิเล็กทรอนิกส์ |
|
| MA | มอเตอร์ไฟฟ้าสามเฟสแบบอะซิงโครนัสพร้อมเบรก |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V รอบต่อนาที: 3000/1500/1000/750 |
ขนาดมม.: 55-160 กำลัง, กิโลวัตต์: 0.02 - 18.7 |
พัดลมเพลา. ระดับการป้องกัน IP55F ระดับการป้องกันเบรก IP44 ตามคำขอ IP55 เป็นไปได้ |
|
| MADP | มอเตอร์ไฟฟ้าหลายจังหวะแบบอะซิงโครนัสสามเฟสพร้อมระบบเบรก |
V/Hz: 400/50 +/- 10%V รอบต่อนาที: 3000/1500, 1500/1000, 1500/750, 3000/1000, 3000/750, 1000/750, 3000/500 |
ขนาดมม.: 63-160 กำลัง, กิโลวัตต์: 0.06 - 18.7 |
จัดส่งพร้อมเบรกคู่และปล่อยด้วยมือ |
|
| MMA | มอเตอร์ไฟฟ้าเฟสเดียวแบบอะซิงโครนัสพร้อมเบรก |
V/Hz: 230/50 +/- 5%V รอบต่อนาที: 3000/1500/1000 |
ขนาดมม.: 50-100 กำลัง, กิโลวัตต์: 0.09 - 2.2 |
พัดลมเพลา. ระดับการป้องกัน IP55F ระดับการป้องกันเบรก IP44 ตามคำขอ IP55 เป็นไปได้ จัดส่งพร้อมเบรกคู่และปล่อยด้วยมือ |
|
|
มอเตอร์ไฟฟ้าเฟสเดียวแบบอะซิงโครนัสพร้อมสวิตช์แรงเหวี่ยง พร้อมรีเลย์ตัดไฟพร้อมเบรก |
V/Hz: 230/50 +/- 5%V รอบต่อนาที: 3000/1500/1000 |
ขนาดมม.: 63-100 กำลัง, กิโลวัตต์: 0.187 - 2.2 |
พัดลมเพลา. ระดับการป้องกัน IP55F ระดับการป้องกันเบรก IP44 ตามคำขอ IP55 เป็นไปได้ จัดส่งพร้อมเบรกคู่และปล่อยด้วยมือ |
||
|
มอเตอร์ไฟฟ้าเฟสเดียวแบบอะซิงโครนัสพร้อมรีเลย์อิเล็กทรอนิกส์ในตัว พร้อมเบรค |
V/Hz: 230/50 +/- 5%V รอบต่อนาที: 3000/1500/1000 |
ขนาดมม.: 63-122 กำลัง, กิโลวัตต์: 0.187 - 2.2 |
พัดลมเพลา. ระดับการป้องกัน IP55F ระดับการป้องกันเบรก IP44 ตามคำขอ IP55 เป็นไปได้ จัดส่งพร้อมเบรกคู่และปล่อยด้วยมือ |
||
|
มอเตอร์ควบคุมเวกเตอร์ (เซอร์โวมอเตอร์) |
เครือข่ายเฟสเดียว: V/Hz: 230/50-60 +/-10% V เครือข่ายสามเฟส: V/Hz: 400/50-60 +/-10% V รอบต่อนาที: 3000 |
ขนาดมม.: 63 - 160 โมเมนต์ N * m: 2.6 - 42 |
การเขียนโปรแกรมผ่านรีโมทคอนโทรลหรือคอมพิวเตอร์ |
||
|
มอเตอร์ไฟฟ้าที่มีตัวเข้ารหัสในตัว |
เครือข่ายเฟสเดียว: V/Hz: 230/50-60 +/-10% V เครือข่ายสามเฟส: V/Hz: 400/50-60 +/-10% V รอบต่อนาที: 3000 |
ขนาดมม.: 63 - 160 โมเมนต์ N * m: 2.6 - 160 |
รักษาแรงบิดที่ความเร็วรอบจาก 0 ถึงสูงสุด ความแม่นยำในการวางตำแหน่งสูง บังคับระบายอากาศ |
||
|
มอเตอร์ไฟฟ้าพร้อมตัวควบคุมความเร็วในตัว |
เครือข่ายเฟสเดียว: V/Hz: 230/50-60 +/- 10% V เครือข่ายสามเฟส: V/Hz: 400/50-60 +/-10% V จำนวนเสา: 2/4/6 |
ขนาดมม.: 71 - 112 โมเมนต์, กิโลวัตต์: 0.12 - 4 |
มอเตอร์ไฟฟ้ารุ่นราคาถูกพร้อมระบบควบคุมความถี่ บังคับระบายอากาศ เบรกในตัว, อุปกรณ์ป้องกันความร้อน รีโมท. |
ตามหมวดหมู่ทั้งหมด แบรนด์ เซ็นเซอร์ความดัน ตัวเข้ารหัส หน่วยตัวเก็บประจุ ซอฟต์สตาร์ท ตัวแปลงความถี่ ปั๊ม เซอร์กิตเบรกเกอร์เทอร์โมสตัท สถานีย่อยหม้อแปลงหม้อแปลงไฟฟ้า Gearmotors สถานีควบคุม ตู้ไฟฟ้า เงื่อนไข มอเตอร์ไฟฟ้า
พารามิเตอร์ที่สำคัญอย่างหนึ่งของมอเตอร์ไฟฟ้า ซึ่งสำคัญพอๆ กับการเลือกมอเตอร์ไฟฟ้าก็คือแรงบิด ค่านี้กำหนดโดยผลคูณของแรงที่ใช้กับแขนก้านบังคับและขึ้นอยู่กับระดับของโหลดเท่านั้น หากในเครื่องยนต์สันดาปภายใน โหลดนี้มาจากเพลาข้อเหวี่ยง ค่าแรงบิดจะได้มาจากกระแสกระตุ้น ในกรณีนี้ ขนาดของโมเมนต์นี้จะขึ้นอยู่กับความเร็วของอุปกรณ์ที่หมุนในสนามแม่เหล็กของสเตเตอร์ เรียกว่าโรเตอร์ แรงบิดแบ่งออกเป็น:
- คงที่ (เริ่มต้น) - ช่วงเวลาที่ไม่ได้ใช้งานขั้นต่ำ
- ระดับกลาง - พัฒนาค่าระหว่างการทำงานของเครื่องยนต์จาก 0 รอบต่อนาทีเป็นค่าสูงสุดในค่าแรงดันเล็กน้อย
- สูงสุด - พัฒนาระหว่างการทำงานของเครื่องยนต์
- ระบุ - สอดคล้อง ค่าเล็กน้อยกำลังและรอบต่อนาที
ในการคำนวณค่าแรงบิดที่กำหนดเป็น "kgm" (กิโลกรัมต่อเมตร) หรือ "Nm" (นิวตันต่อเมตร) คู่มือไฟฟ้าจำนวนมากมีสูตรพิเศษที่คำนึงถึงนอกเหนือจากการกระทำหลักของการหมุน สนามแม่เหล็กปัจจัยต่างๆ หลายประการ เช่น
- แรงดันเครือข่าย
- ค่าความต้านทานอุปนัยและแอคทีฟ
- ขึ้นอยู่กับการเพิ่มสลิป
แต่การเติบโตของสลิปไม่ได้ทำให้เกิดโมเมนตัมสูงเสมอไป บ่อยครั้งเมื่อถึงค่าวิกฤตจะสังเกตเห็นการลดลงอย่างรวดเร็ว ปรากฏการณ์นี้เรียกว่าโมเมนต์พลิกกลับ หนึ่งในอุปกรณ์ที่รักษาความเร็วของการหมุนของโรเตอร์และด้วยเหตุนี้ขนาดของแรงบิดจึงเท่ากับ ตัวแปลงความถี่ซึ่งปัจจุบันมีการใช้กันอย่างแพร่หลายในทุกพื้นที่ซึ่งความสำเร็จของงานการผลิตหลายอย่างขึ้นอยู่กับการควบคุมของเครื่องยนต์
การเลือกมอเตอร์ไฟฟ้าสำหรับแรงบิด
สำหรับตัวเลือกที่จำเป็นสำหรับการปฏิบัติงานบางอย่างของมอเตอร์ไฟฟ้า พิจารณาคุณลักษณะเกือบทั้งหมดตั้งแต่ตัวบ่งชี้กำลังจนถึงพารามิเตอร์น้ำหนักและขนาด แต่ละองค์ประกอบมีความสำคัญในทางของตัวเองในการแก้ความแตกต่าง แรงบิดก็สำคัญไม่แพ้กัน เนื่องจากแรงบิดนั้นเกี่ยวข้องโดยตรงกับการปฏิวัติในอัตราส่วน: ยิ่งรอบตัวเองมากเท่าไหร่ ช่วงเวลาก็จะน้อยลงเท่านั้น การเลือกมอเตอร์ไฟฟ้าจะขึ้นอยู่กับความแตกต่างดังต่อไปนี้:
- จากความต้องการความเร็ว ในกรณีนี้ จะเป็นประโยชน์มากกว่าในการเลือกมอเตอร์สำหรับแรงบิดต่ำสำหรับผู้ที่ทำงานโดยใช้แรงต่ำและที่ความเร็วสูง และด้วยแรงบิดเริ่มต้นปานกลางหรือสูงสำหรับผู้ที่ทำงานในโหมดขั้นสูง ที่ความเร็วต่ำ
- แรงดันไฟฟ้าเริ่มต้น ที่นี่คำนึงถึงแรงหลักเช่นในการควบคุมลิฟต์ควรเลือกมอเตอร์ความเร็วสูง แรงบิดเริ่มต้นสามารถยกของหนักได้ตั้งแต่เริ่มต้น แม้ว่าหลายคน บทความเกี่ยวกับมอเตอร์ไฟฟ้าขอแนะนำให้ใช้ซอฟต์สตาร์ทเตอร์ที่สามารถป้องกันการโอเวอร์โหลดที่ไม่ต้องการได้
เป็นที่น่าจดจำว่าตัวเลือกไม่ได้ทำตามตัวบ่งชี้ตัวใดตัวหนึ่ง แม้ว่าจะเน้นที่สัมพันธ์กับแรงบิดก็ตาม เนื่องจากตัวบ่งชี้แต่ละตัวจะปรับทิศทางตามจูงใจในการทำงานของอุปกรณ์ขับเคลื่อนไฟฟ้าและปริมาณงานในการดำเนินงานทางสถิติและแบบไดนามิก เงื่อนไขที่องค์กรกำหนดเอง
ในส่วนนี้ เราได้โพสต์บทความที่เลือกสรรซึ่งเกี่ยวกับแนวคิดที่สำคัญดังกล่าวในทฤษฎีของไดรฟ์แบบอะซิงโครนัสในช่วงเวลาหนึ่ง ที่นี่ผู้อ่านจะพบเนื้อหาที่เปิดเผยความหมายของคำศัพท์แต่ละคำไม่ทางใดก็ทางหนึ่งที่เกี่ยวข้องกับแนวคิดของช่วงเวลา นอกจากนี้ เราได้จัดกลุ่มบทความที่มีสูตรซึ่งคุณสามารถคำนวณค่าเฉพาะของช่วงเวลาหรือสร้างการพึ่งพาได้ เพื่อความชัดเจนยิ่งขึ้น คุณสามารถหาตัวอย่างที่แสดงการใช้สูตรในการคำนวณตัวบ่งชี้เฉพาะได้ที่นี่
โหลดโมเมนต์เป็นโมเมนต์ที่เกิดจากการหมุน ระบบเครื่องกลติดกับเพลา มอเตอร์เหนี่ยวนำ. ช่วงเวลาแห่งการต่อต้านถูกพบเป็นคำพ้องความหมายในวรรณคดี แรงบิดของโหลดขึ้นอยู่กับพารามิเตอร์ทางเรขาคณิตและทางกายภาพของตัวเครื่องที่รวมอยู่ในห่วงโซ่จลนศาสตร์ที่ติดอยู่กับเพลามอเตอร์ ตามกฎแล้ว เมื่อคำนวณโมเมนต์ความต้านทาน เป็นเรื่องปกติที่จะนำไปที่เพลามอเตอร์
แรงบิดเบรก- ช่วงเวลาที่พัฒนา เครื่องอะซิงโครนัสในโหมดเบรก ในวรรณคดี มีคำพ้องความหมายสำหรับคำว่า: แรงบิดเบรก ภายในกรอบของทฤษฎี มอเตอร์ไฟฟ้าแบบอะซิงโครนัสพิจารณาโหมดการเบรก 3 โหมด: การเบรกแบบสร้างใหม่ ไดนามิก และกระแสย้อนกลับ
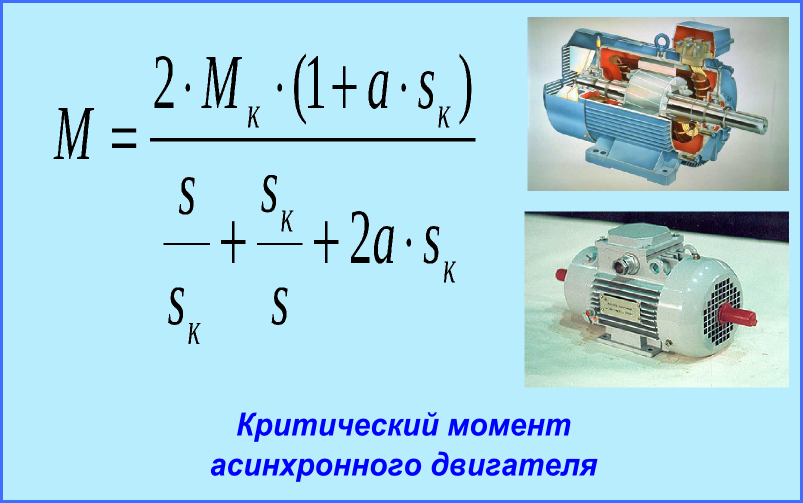 โมเมนต์สำคัญของมอเตอร์เหนี่ยวนำ – มูลค่าสูงสุดโมเมนต์ที่พัฒนาโดยมอเตอร์ไฟฟ้า ช่วงเวลาที่มาถึงค่านี้ที่สลิปวิกฤต หากแรงบิดโหลดบนเพลามอเตอร์มากกว่าแรงบิดวิกฤต มอเตอร์จะหยุดทำงาน
โมเมนต์สำคัญของมอเตอร์เหนี่ยวนำ – มูลค่าสูงสุดโมเมนต์ที่พัฒนาโดยมอเตอร์ไฟฟ้า ช่วงเวลาที่มาถึงค่านี้ที่สลิปวิกฤต หากแรงบิดโหลดบนเพลามอเตอร์มากกว่าแรงบิดวิกฤต มอเตอร์จะหยุดทำงาน
 แรงบิดสูงสุดของมอเตอร์แบบอะซิงโครนัส- โมเมนต์ที่เกิดขึ้นบนเพลามอเตอร์ที่กำลังไฟพิกัดและความเร็วที่กำหนด ข้อมูลที่ได้รับการจัดอันดับเป็นที่เข้าใจกันว่าเป็นข้อมูลที่กำหนดเมื่อเครื่องยนต์ทำงานในโหมดที่ได้รับการออกแบบและผลิต
แรงบิดสูงสุดของมอเตอร์แบบอะซิงโครนัส- โมเมนต์ที่เกิดขึ้นบนเพลามอเตอร์ที่กำลังไฟพิกัดและความเร็วที่กำหนด ข้อมูลที่ได้รับการจัดอันดับเป็นที่เข้าใจกันว่าเป็นข้อมูลที่กำหนดเมื่อเครื่องยนต์ทำงานในโหมดที่ได้รับการออกแบบและผลิต
| แนวคิดของช่วงเวลา |
 โมเมนต์แม่เหล็กไฟฟ้า- โมเมนต์ที่เกิดขึ้นบนเพลามอเตอร์เมื่อไหลผ่านขดลวด กระแสไฟฟ้า. คำพ้องความหมายสำหรับคำนี้มีอยู่ในวรรณคดี: แรงบิดของมอเตอร์หรือแรงบิดของมอเตอร์ไฟฟ้า มักพบการแปรผันที่มีการกำหนดรายละเอียดมากขึ้น: แรงบิดแม่เหล็กไฟฟ้าหรือแรงบิดแม่เหล็กไฟฟ้า
โมเมนต์แม่เหล็กไฟฟ้า- โมเมนต์ที่เกิดขึ้นบนเพลามอเตอร์เมื่อไหลผ่านขดลวด กระแสไฟฟ้า. คำพ้องความหมายสำหรับคำนี้มีอยู่ในวรรณคดี: แรงบิดของมอเตอร์หรือแรงบิดของมอเตอร์ไฟฟ้า มักพบการแปรผันที่มีการกำหนดรายละเอียดมากขึ้น: แรงบิดแม่เหล็กไฟฟ้าหรือแรงบิดแม่เหล็กไฟฟ้า
นี่เป็นหนึ่งในพารามิเตอร์หลักของทฤษฎีนี้ ซึ่งกำหนดความสามารถของมอเตอร์แบบอะซิงโครนัสในการหมุนโหลดที่เชื่อมต่อกับเพลาในโหมดสถิตและไดนามิกที่ต้องการ ด้วยเหตุนี้ เมื่อตัดสินใจว่าจะใช้มอเตอร์สำหรับงานเฉพาะหรือไม่ ควรพิจารณาธรรมชาติของพฤติกรรมของแรงบิดแม่เหล็กไฟฟ้าด้วย ในยามที่ กรณีทั่วไป โมเมนต์แม่เหล็กไฟฟ้าบนเพลามอเตอร์ถูกกำหนดโดยสูตร: Mem \u003d (? Ef x If) /? 2
 ภายในกรอบทฤษฎีสมัยใหม่ของอะซิงโครนัส เครื่องจักรไฟฟ้าใช้คำศัพท์จำนวนหนึ่งที่เกี่ยวข้องกับแนวคิดของช่วงเวลา คำเหล่านี้บางคำอ้างถึงโมเมนต์ที่สร้างขึ้นบนเพลา (บนโรเตอร์) ของมอเตอร์ไฟฟ้า คำศัพท์อีกกลุ่มหนึ่งกำหนดช่วงเวลาที่สร้างขึ้นโดยภาระทางกลที่เชื่อมต่อกับเพลาของมอเตอร์ไฟฟ้า
ภายในกรอบทฤษฎีสมัยใหม่ของอะซิงโครนัส เครื่องจักรไฟฟ้าใช้คำศัพท์จำนวนหนึ่งที่เกี่ยวข้องกับแนวคิดของช่วงเวลา คำเหล่านี้บางคำอ้างถึงโมเมนต์ที่สร้างขึ้นบนเพลา (บนโรเตอร์) ของมอเตอร์ไฟฟ้า คำศัพท์อีกกลุ่มหนึ่งกำหนดช่วงเวลาที่สร้างขึ้นโดยภาระทางกลที่เชื่อมต่อกับเพลาของมอเตอร์ไฟฟ้า
คำเหล่านี้กำหนดทั้งโมเมนต์ที่พัฒนาโดยเครื่องยนต์และสถานะต่างๆ ของโมเมนต์บนเพลาเอาท์พุตของเครื่องยนต์ สถานะ หมายถึง ค่าของช่วงเวลาที่จุดวิกฤต ตัวอย่างเช่น แรงบิดที่กำหนดหรือแรงบิดเริ่มต้น
, การวินิจฉัย, การรักษา, การรักษาโรคหนองในเทียม")




