Sono determinati principalmente dal modo in cui viene attivato l'avvolgimento di eccitazione. A seconda di ciò, i motori elettrici si distinguono:
1. con stimolazione indipendente: l'avvolgimento di eccitazione è alimentato da una sorgente esterna corrente continua(eccitatore o raddrizzatore),
2. Insieme a eccitazione parallela : l'avvolgimento di campo è collegato in parallelo all'avvolgimento dell'indotto,
3. : l'avvolgimento di campo è collegato in serie all'avvolgimento dell'indotto,
4. con eccitazione mista: ha due avvolgimenti di eccitazione, uno collegato in parallelo con l'avvolgimento dell'indotto e l'altro in serie con esso.
Tutti questi motori elettrici hanno lo stesso dispositivo e differiscono solo per l'implementazione dell'avvolgimento di eccitazione. Gli avvolgimenti di eccitazione di questi motori elettrici vengono eseguiti allo stesso modo di.
motore elettrico corrente continua con stimolazione indipendente
In questo motore elettrico (Fig. 1, a), l'avvolgimento dell'indotto è collegato alla sorgente CC principale (rete CC, generatore o raddrizzatore) con tensione U e l'avvolgimento di eccitazione è collegato a una sorgente ausiliaria con tensione UB. Il reostato di controllo Rrv è incluso nel circuito dell'avvolgimento di eccitazione e il reostato di avviamento Rn è incluso nel circuito dell'avvolgimento dell'indotto.
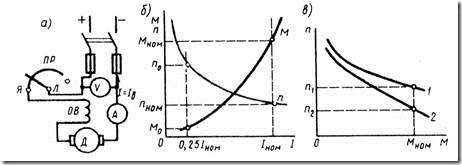
Il reostato di regolazione viene utilizzato per regolare la velocità di rotazione dell'indotto del motore e il reostato di avviamento viene utilizzato per limitare la corrente nell'avvolgimento dell'indotto durante l'avvio. tratto caratteristico motore elettrico è che la sua corrente di eccitazione Iv non dipende dalla corrente Ii nell'avvolgimento dell'indotto (corrente di carico). Pertanto, trascurando l'effetto smagnetizzante della reazione dell'indotto, possiamo approssimativamente supporre che il flusso del motore Ф non dipenda dal carico. Le dipendenze della coppia elettromagnetica M e della velocità di rotazione n dalla corrente Il saranno lineari (Fig. 2, a). Di conseguenza, anche la caratteristica meccanica del motore sarà lineare - dipendenza n (M) (Fig. 2, b).
In assenza di un reostato con resistenza Rn nel circuito dell'indotto, la velocità e le caratteristiche meccaniche saranno rigide, cioè con un piccolo angolo di inclinazione rispetto all'asse orizzontale, poiché la caduta di tensione IаΣRя negli avvolgimenti della macchina inclusa nel circuito dell'indotto a il carico nominale è solo il 3-5% di Unom. Queste caratteristiche (linee rette 1 in Fig. 2, aeb) sono dette naturali. Quando nel circuito dell'indotto è incluso un reostato con resistenza Rn, la pendenza di queste caratteristiche aumenta, per cui è possibile ottenere una famiglia di caratteristiche del reostato 2, 3 e 4, corrispondente a significati diversi Rn1, Rn2 e Rn3.
Riso. 1. Schemi schematici di motori elettrici corrente continua con eccitazione indipendente (a) e parallela (b).
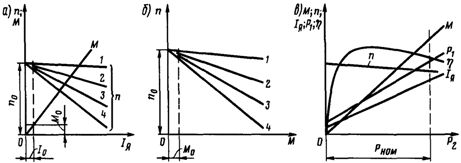
Riso. 2. Caratteristiche dei motori elettrici corrente continua con eccitazione indipendente e parallela: a - alta velocità e coppia, b - meccanica, c - funzionante più resistenza Rn, maggiore è l'angolo di inclinazione che ha la caratteristica reostatica, cioè più morbida è.
Il reostato di regolazione Rpv consente di modificare la corrente di eccitazione del motore Ib e il suo flusso magnetico Ф In questo caso cambierà anche la velocità di rotazione n.
Nel circuito dell'avvolgimento di eccitazione non sono installati interruttori e fusibili, poiché quando questo circuito si interrompe, il flusso magnetico del motore elettrico diminuisce drasticamente (al suo interno rimane solo il flusso del magnetismo residuo) e si verifica una modalità di emergenza. Se il motore elettrico funziona al minimo o con un piccolo carico sull'albero, la velocità aumenta bruscamente (il motore si scatena). In questo caso, la corrente nell'avvolgimento dell'indotto Ia aumenta notevolmente e può verificarsi un incendio a tutto tondo. Per evitare ciò, la protezione deve scollegare il motore dalla fonte di alimentazione.
Un forte aumento della velocità di rotazione quando il circuito dell'avvolgimento di eccitazione è interrotto è spiegato dal fatto che in questo caso il flusso magnetico Ф diminuisce bruscamente (al valore del flusso Fost dal magnetismo residuo) ed e. ds E e l'attuale Iya aumenta. E poiché la tensione applicata U rimane invariata, la velocità di rotazione n aumenterà fino a e. ds E non raggiungerà un valore approssimativamente uguale a U (necessario per lo stato di equilibrio circuito elettrico ancore, in cui E= U - IаΣRя.
Quando il carico sull'albero è prossimo a quello nominale, il motore elettrico si fermerà in caso di interruzione del circuito di eccitazione, poiché momento elettromagnetico, che il motore può sviluppare con una significativa diminuzione del flusso magnetico, diminuisce e diventa inferiore al momento di carico sull'albero. In questo caso, anche la corrente Ia aumenta notevolmente e la macchina deve essere scollegata dalla fonte di alimentazione.
Si noti che il regime di rotazione n0 corrisponde al minimo ideale, quando il motore non consuma energia elettrica dalla rete e la sua coppia elettromagnetica è zero. In condizioni reali, al minimo, il motore consuma dalla rete la corrente a vuoto I0, necessaria per compensare perdite interne potenza, e sviluppa un certo momento M0 necessario per vincere le forze di attrito nella macchina. Pertanto, in realtà, il regime del minimo è inferiore a n0.
La dipendenza della velocità di rotazione n e della coppia elettromagnetica M dalla potenza P2 (Fig. 2, c) sull'albero motore, come risulta dalle relazioni considerate, è lineare. Anche le dipendenze della corrente dell'avvolgimento dell'indotto Iya e della potenza P1 su P2 sono quasi lineari. La corrente Ia e la potenza P1 a P2 = 0 sono la corrente a vuoto I0 e la potenza P0 consumata a vuoto. La curva di efficienza ha un carattere comune a tutte le macchine elettriche.
motore elettrico corrente continua con eccitazione parallela
In questo motore elettrico (vedi Fig. 1, b), gli avvolgimenti di campo e di armatura sono alimentati dalla stessa fonte di energia elettrica con tensione U. Il reostato di controllo Rpv è incluso nel circuito dell'avvolgimento di eccitazione e il reostato di avviamento Rp è incluso nel circuito di avvolgimento dell'indotto.
Nel motore elettrico in esame, essenzialmente, pasti separati circuiti dell'indotto e avvolgimenti di eccitazione, per cui la corrente di eccitazione Iv non dipende dalla corrente dell'avvolgimento dell'indotto Iv. Pertanto, un motore ad eccitazione parallela avrà le stesse caratteristiche di un motore ad eccitazione indipendente. Tuttavia, un motore eccitato in parallelo funziona correttamente solo se alimentato da una sorgente CC a tensione costante.
Quando il motore elettrico è alimentato da una sorgente a tensione variabile (generatore o raddrizzatore controllato), una diminuzione della tensione di alimentazione U provoca una corrispondente diminuzione della corrente di eccitazione Iv e del flusso magnetico F, che porta ad un aumento dell'avvolgimento dell'indotto attuale Ia. Ciò limita la possibilità di controllare la velocità dell'indotto variando la tensione di alimentazione U. Pertanto, i motori elettrici progettati per essere alimentati da un generatore o da un raddrizzatore controllato devono essere eccitati in modo indipendente.
motore elettrico corrente continua con eccitazione sequenziale
Per limitare la corrente all'avviamento, nel circuito dell'avvolgimento dell'indotto è incluso un reostato di avviamento Rp (Fig. 3, a) e per controllare la velocità è possibile collegare un reostato di regolazione Rrv in parallelo all'avvolgimento di eccitazione.
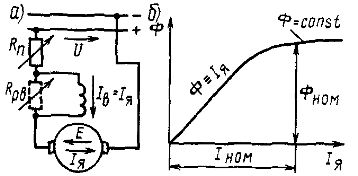
Riso. 3. Schema schematico del motore elettrico corrente continua con eccitazione seriale (a) e la dipendenza del suo flusso magnetico Ф dalla corrente Iа nell'avvolgimento dell'indotto (b)
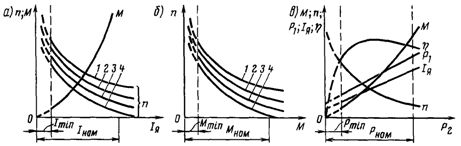
Riso. 4. Caratteristiche del motore elettrico corrente continua con eccitazione sequenziale: a - alta velocità e coppia, b - meccanica, c - lavoratori.
Una caratteristica di questo motore elettrico è che la sua corrente di eccitazione Iv è uguale o proporzionale (quando il reostato Rpv è acceso) alla corrente dell'avvolgimento dell'indotto Ia, quindi il flusso magnetico Ф dipende dal carico del motore (Fig. 3, b ).
Con corrente di avvolgimento I, minore (0,8-0,9) corrente nominale Inom il sistema magnetico della macchina non è saturo e possiamo supporre che il flusso magnetico Ф cambi in proporzione diretta alla corrente Iа. Pertanto, la caratteristica di velocità del motore elettrico sarà morbida: con un aumento della corrente, la Ith frequenza di rotazione n diminuirà drasticamente (Fig. 4, a). La diminuzione della velocità di rotazione n si verifica a causa dell'aumento della caduta di tensione IяΣRя. in resistenza interna Ria. circuiti di avvolgimento dell'indotto, nonché a causa di un aumento del flusso magnetico F.
Il momento elettromagnetico M con un aumento della corrente Ia aumenterà notevolmente, poiché in questo caso aumenta anche il flusso magnetico F, ovvero il momento M sarà proporzionale alla corrente Ia. Pertanto, a una corrente Ia inferiore a (0,8 N-0,9) Inom, la caratteristica di velocità ha la forma di un'iperbole e la caratteristica del momento ha la forma di una parabola.
Alle correnti Il > Inom, le dipendenze di M ed n da Il sono lineari, poiché in questa modalità il circuito magnetico sarà saturato e il flusso magnetico Ф non cambierà al variare della corrente Il.
La caratteristica meccanica, cioè la dipendenza di n da M (Fig. 4, b), può essere costruita sulla base delle dipendenze di n e M da Ib. Oltre alla caratteristica naturale 1, è possibile ottenere una famiglia di caratteristiche del reostato 2, 3 e 4 inserendo nel circuito dell'avvolgimento dell'indotto un reostato con resistenza Rp. Queste caratteristiche corrispondono a diversi valori di Rn1, Rn2 e Rn3, mentre maggiore è Rn, minore è la caratteristica.
La caratteristica meccanica del motore considerato è morbida e ha un carattere iperbolico. A bassi carichi, il flusso magnetico Ф diminuisce notevolmente, la velocità di rotazione n aumenta bruscamente e può superare il valore massimo consentito (il motore esaurisce la marcia). Pertanto, tali motori non possono essere utilizzati per azionare meccanismi funzionanti al minimo e a basso carico (varie macchine utensili, nastri trasportatori, ecc.).
Di solito minimo carico consentito per motori di grande e media potenza è (0,2 .... 0,25) Inom. Per evitare che il motore funzioni senza carico, è rigidamente collegato al meccanismo di trasmissione (cambio o frizione cieca), l'uso di una trasmissione a cinghia o di una frizione a frizione è inaccettabile.
Nonostante questo inconveniente, i motori ad eccitazione in serie trovano largo impiego, soprattutto dove vi sono ampie variazioni della coppia di carico e condizioni di avviamento difficili: in tutti gli azionamenti di trazione (locomotive elettriche, locomotive diesel, treni elettrici, auto elettriche, carrelli elevatori elettrici, ecc.), così come negli azionamenti di meccanismi di sollevamento carichi (gru, ascensori, ecc.).
Ciò è spiegato dal fatto che con una caratteristica morbida, un aumento della coppia di carico porta ad un minore aumento del consumo di corrente e potenza rispetto ai motori con eccitazione indipendente e parallela, quindi i motori con eccitazione in serie tollerano meglio i sovraccarichi. Inoltre, questi motori hanno una coppia di spunto elevata rispetto ai motori con eccitazione parallela e indipendente, poiché con un aumento della corrente dell'avvolgimento dell'indotto all'avvio, aumenta di conseguenza anche il flusso magnetico.
Se accettiamo, ad esempio, che la corrente di avviamento a breve termine può essere 2 volte la corrente nominale di funzionamento della macchina, e trascuriamo l'effetto della saturazione, la reazione dell'indotto e la caduta di tensione nel circuito del suo avvolgimento, allora in un motore con eccitazione in serie, la coppia di spunto sarà 4 volte maggiore del nominale (in Sia la corrente che il flusso magnetico aumentano 2 volte) e nei motori con eccitazione indipendente e parallela - solo 2 volte di più.
In realtà, a causa della saturazione del circuito magnetico, il flusso magnetico non aumenta proporzionalmente alla corrente, ma comunque la coppia di spunto di un motore con eccitazione in serie, a parità di condizioni, sarà significativamente maggiore della coppia di spunto dello stesso motore con eccitazione indipendente o parallela.
Le dipendenze di n e M dalla potenza P2 sull'albero motore (Fig. 4, c), come risulta dalle disposizioni precedenti, sono non lineari, le dipendenze di P1, Ip e η da P2 hanno la stessa forma di motori ad eccitazione parallela.
motore elettrico corrente continua con eccitazione mista
In questo motore elettrico (Fig. 5, a), il flusso magnetico Ф viene creato come risultato dell'azione congiunta di due avvolgimenti di eccitazione - paralleli (o indipendenti) e serie, attraverso i quali le correnti di eccitazione Iv1 e Iv2 \u003d Ib
Ecco perchè
![]()
dove Фposl è il flusso magnetico dell'avvolgimento in serie, a seconda della corrente Il, Фpar è il flusso magnetico dell'avvolgimento parallelo, che non dipende dal carico (determinato dalla corrente di eccitazione Iв1).
La caratteristica meccanica di un motore elettrico con eccitazione mista (Fig. 5, b) si trova tra le caratteristiche dei motori con eccitazione parallela (retta 1) e serie (curva 2). A seconda del rapporto tra le forze magnetomotrici degli avvolgimenti in parallelo e in serie nel modo nominale, è possibile approssimare le caratteristiche di un motore con eccitazione mista alla caratteristica 1 (curva 3 con un basso ppm dell'avvolgimento in serie) o alla caratteristica 2 (curva 4 per un piccolo ppm) con avvolgimento parallelo).
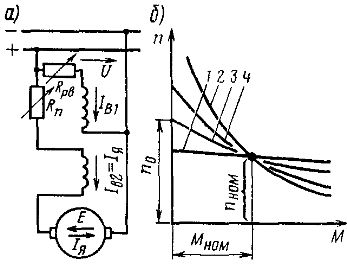
Riso. 5. Schema di un motore elettrico ad eccitazione mista (a) e sue caratteristiche meccaniche (b)
Il vantaggio del motore corrente continua con eccitazione mista è che, avendo una caratteristica meccanica morbida, può funzionare al minimo, quando Fposl = 0. In questa modalità, la frequenza di rotazione della sua armatura è determinata dal flusso magnetico Фpar e ha un valore limitato (il motore non si scatena).
[documento]1.doc
Compiti a casa #2(modulo 5)
“Motore in corrente continua con eccitazione in serie. Assegnazione di elementi. Principio di funzionamento"
gr.TP-07
Asmolkova O.A.
I semestre 2009
Motore a corrente continua con eccitazione in serie. Assegnazione di elementi. Principio di funzionamento
1. Dispositivo e scopo degli elementi del motore CC
.
motore a corrente continua - macchina elettrica , macchina a corrente continua, trasformando energia elettrica CC in energia meccanica. È costituita, come tutte le macchine in corrente continua, da uno statore fisso a poli e da un rotore rotante (indotto) con collettore.
statore La macchina a corrente continua è costituita da un telaio cilindrico (cassa), poli con avvolgimento di eccitazione e protezioni terminali ( Riso. 2.1.). Sul letto, i poli principali (principali) sono rinforzati per eccitare il flusso magnetico principale e quelli aggiuntivi per migliorare la commutazione nel motore. Il polo principale è costituito da un'anima del polo in lamiera d'acciaio imbullonata al telaio e da una bobina di eccitazione. Il nucleo all'estremità libera è dotato di un'espansione polare per creare la distribuzione richiesta dell'induzione magnetica lungo la circonferenza dell'armatura. letto 3 è il giogo della macchina, cioè la parte che chiude il circuito magnetico del flusso principale Ф. È realizzato in acciaio fuso, poiché il flusso magnetico al suo interno è relativamente costante. Ulteriori pali sono installati sul telaio tra quelli principali. Il loro avvolgimento è collegato in serie con l'avvolgimento dell'indotto. Lo scopo di questi poli è creare un campo magnetico aggiuntivo. Ciò è necessario affinché le spazzole sul collettore non brillino.
Ancora (rotore) è chiamato la parte della macchina, nel cui avvolgimento, quando ruota rispetto al principale campo magnetico I campi elettromagnetici sono indotti. Ancora 5 Il motore a corrente continua è costituito da un albero in acciaio, un nucleo dentato in acciaio, un avvolgimento disposto nelle sue scanalature e un collettore montato sull'albero dell'indotto ( Riso. 2.1.). Gli avvolgimenti di campo sono necessari per garantire un'interazione ottimale tra i campi magnetici del rotore e dello statore (cioè creare momento massimo sul rotore). parte caratteristica del motore (o qualsiasi macchina elettrica) DC è il collettore. Questo è un cilindro cavo assemblato da lastre di rame a forma di cuneo isolate l'una dall'altra. Anche le piastre del collettore sono isolate dall'albero motore. Sono collegati da conduttori ai fili di avvolgimento posti nelle scanalature dell'armatura. L'avvolgimento rotante è collegato al circuito esterno tramite un contatto strisciante tra le spazzole e il commutatore. Il collettore nelle macchine a corrente continua serve a rettificare l'EMF variabile indotto nell'avvolgimento dell'indotto rotante e ad ottenere un momento elettromagnetico costante nella direzione.
Riso. 2. 1. Dispositivo motore CC:
1 - avvolgimento di eccitazione;2 - pali;3 - letto;4 - punta del palo;5 - ancora;6 - conduttori per avvolgimento di ancora;
7 - nucleo di ancoraggio dentato;8 - traferro della macchina
2. Principio di funzionamento del motore a corrente continua
2.1 Informazioni generali
Quando l'avvolgimento dell'indotto ruota in un campo magnetico fisso, viene indotto un EMF variabile, che cambia con la frequenza:
Dove n- velocità di rotazione dell'indotto.
Quando l'indotto ruota, un EMF variabile agisce tra due punti qualsiasi dell'avvolgimento dell'indotto. Tuttavia, tra le spazzole a contatto fisso, agisce una costante EMF in grandezza e direzione e, pari alla somma dei valori istantanei dell'EMF indotto in tutte le spire collegate in serie dell'indotto posto tra queste spazzole.
Dipendenza da campi elettromagnetici e dal flusso magnetico della macchina e la velocità di rotazione dell'indotto ha la forma:
Quando si collega l'avvolgimento dell'indotto a una rete con tensione u, EMF e sarà approssimativamente uguale alla tensione u e velocità del rotore:
Pertanto, a causa della presenza di un collettore, quando una macchina in corrente continua funziona in modalità motore, la velocità del rotore non è strettamente correlata alla frequenza di rete, ma può variare in un ampio intervallo variando la tensione u e flusso magnetico F. L'asse di simmetria che separa i poli di una macchina a corrente continua è chiamato neutro geometrico.
Con un circuito esterno aperto, la corrente nell'avvolgimento dell'indotto non scorrerà, poiché i campi elettromagnetici indotti in due parti dell'avvolgimento dell'indotto situati su entrambi i lati del neutro geometrico sono diretti in modo opposto e si compensano reciprocamente. Per fornire la massima tensione dall'avvolgimento dell'indotto al circuito esterno, questo circuito deve essere collegato a due punti dell'avvolgimento dell'indotto, tra i quali interviene la maggiore differenza di potenziale, dove devono essere installate le spazzole. Quando l'armatura ruota, i punti si spostano dal neutro geometrico, ma sempre più nuovi punti di avvolgimento si avvicineranno alle spazzole, tra le quali agisce l'EMF e, quindi l'EMF nel circuito esterno sarà invariato in intensità e direzione. Per ridurre le ondulazioni EMF durante il passaggio delle spazzole da una piastra collettore all'altra, in ogni ramo parallelo dell'avvolgimento dell'indotto sono solitamente inclusi almeno 16 conduttori attivi.
Sull'armatura, attraverso l'avvolgimento di cui scorre la corrente io, il momento elettromagnetico agisce:
Quando la macchina funziona in modalità motore, la coppia elettromagnetica è in rotazione.
2.2 Reazione dell'indotto del motore CC
Al minimo, il flusso magnetico nel motore è creato solo da HC ^F negli avvolgimenti di eccitazione. In questo caso, il flusso magnetico F in con un traferro costante tra l'indotto e il nucleo del polo principale (tipico per molte macchine a corrente continua), è distribuito simmetricamente rispetto all'asse longitudinale delle macchine.
Quando la macchina funziona sotto carico, una corrente passa attraverso l'avvolgimento dell'indotto e il NS dell'indotto crea il proprio campo magnetico. Viene chiamato l'effetto del campo dell'indotto sul campo magnetico della macchina reazione di ancoraggio. flusso magnetico F aq creato da na ancora F aq in una macchina a due poli, quando si installano le spazzole sul neutro, è diretto lungo asse trasversale macchine, quindi il campo magnetico dell'armatura è detto trasversale. Come risultato del flusso F aq la distribuzione simmetrica del campo magnetico della macchina è distorta e il flusso risultante F tagliareè concentrato principalmente ai bordi dei poli principali. In questo caso, il fisico neutrale b-b(la linea che collega i punti del cerchio di armatura in cui l'induzione è zero) è spostata rispetto alla geometria neutro a-a ad una certa angolazione β (fig.2.2). Nei motori, il neutro fisico è spostato contro il senso di rotazione.
Basato sulla legge piena corrente L'armatura NS, che agisce nel traferro a una distanza x dall'asse dei poli principali è determinata dall'espressione:
Pertanto, NS ancora F aq varia linearmente lungo la sua circonferenza; sotto la metà del polo principale è uguale a zero, e nei punti in cui sono installate le spazzole ha un valore massimo. Induzione magnetica in aria
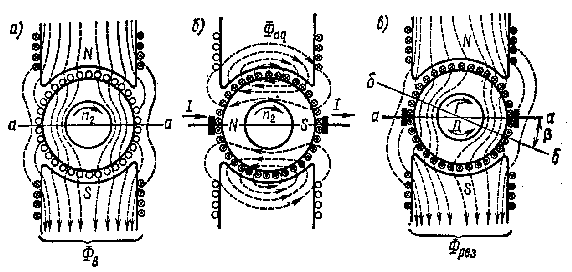
^ Fig2.2 - Il campo magnetico di un motore a corrente continua: a) dall'avvolgimento di eccitazione; b) dall'avvolgimento dell'indotto; c) risultante (F in - flusso magnetico a x.x.; F aq - flusso magnetico creato dall'armatura NS; F tagliare - flusso risultante; a-a - neutro geometrico; bb - fisico neutro; β – angolo di spostamento neutro b-b)
Gioco con sistema magnetico insaturo:
Dove è il valore del traferro nel punto x.
2.3 Coppia del motore a corrente continua
Se l'avvolgimento di campo e l'indotto del motore sono collegati a una rete CC con una tensione ^U quindi, c'è una coppia elettromagnetica M em. Coppia utile M sull'albero motore è minore di quella elettromagnetica per il valore del momento contrastante creato nella macchina dalle forze di attrito e uguale al momento M X in modalità x.x., cioè M = M em -M X .
Coppia di spunto motore deve essere maggiore del freno statico M t nello stato di riposo del rotore, altrimenti l'indotto del motore non inizierà a ruotare. In regime stazionario (al n = const) esiste un equilibrio dei momenti M rotanti e M t frenanti:
M = M em - M X = M t
È noto dai meccanici che potenza meccanica motore può essere espresso in termini di coppia e velocità angolare
Pertanto, la coppia utile del motore ^M(N m) espresso in termini di potenza netta R(kW) e velocità n(giri/min),
M=9550P/n
Discutiamo di alcune questioni importanti relative all'avvio e al funzionamento dei motori CC. Dall'equazione dello stato elettrico del motore, ne consegue che
io io = (U -- E)/R io
Nel modo operativo, la corrente di armatura I I è limitata e. ds e, se n è approssimativamente uguale a n nom. Al momento del lancio, n = 0, e. ds E = 0 e corrente di avviamento io P = u/ R io 10-30 volte più del nominale. Pertanto, l'avviamento diretto del motore, ovvero il collegamento diretto dell'indotto alla tensione di rete, è inaccettabile. Per limitare l'elevata corrente di avviamento dell'indotto, un reostato di avviamento è collegato in serie all'indotto prima dell'avvio. R P con poca resistenza. In questo caso, quando E = O
io P =U/(R io - R P ) << U/R io
Resistenza del reostato RP viene selezionato in base alla corrente di armatura consentita.
Quando il motore accelera alla velocità nominale e. ds e aumenta e la corrente diminuisce e il reostato di avviamento viene gradualmente e completamente rimosso (i reostati di avviamento sono calcolati per accensioni a breve termine). Regolazione del reostato R reg in un circuito di eccitazione con una resistenza relativamente alta (decine e centinaia di ohm), prima di avviare il motore, viene completamente rimosso in modo che all'avvio la corrente di eccitazione e il flusso magnetico dello statore F erano nominali. Ciò porta ad un aumento della coppia di spunto, che assicura un'accelerazione facile e veloce del motore.
Dopo l'avviamento e l'accelerazione, si verifica un funzionamento a regime del motore, in cui la coppia frenante sull'albero ^ mt sarà bilanciato dal momento sviluppato dal motore M em , cioè. M em == M t ( a n = const. )
I motori a corrente continua possono ripristinare lo stato di funzionamento stazionario disturbato da una variazione della coppia frenante, ovvero possono sviluppare coppia M, pari al nuovo valore della coppia frenante M t a una velocità corrispondentemente nuova n".
Infatti se la coppia frenante del carico M t è maggiore della coppia del motore M em, quindi la velocità dell'indotto diminuirà. A tensione costante u e flusso F questo causerà una diminuzione. ds e armatura, aumentando la corrente e la coppia dell'armatura fino a raggiungere l'equilibrio, a cui M em = M t e n" < n. Quando la coppia frenante viene ridotta a M t, la modalità di funzionamento a regime stazionario si imposta analogamente a M em = M t" e n"> n" . Pertanto, i motori CC hanno la proprietà di autoregolazione - può sviluppare una coppia pari alla coppia frenante.
2.4 Controllo della frequenza
La velocità dell'indotto di un motore a corrente continua è determinata in base all'equazione dello stato elettrico u= eR io io io dopo aver sostituito e in esso. ds E = sfn:

Caduta di tensione dell'indotto R io io io piccolo: al carico nominale, non supera 0,03 - 0,07 u nom .
Pertanto, la velocità di un motore a corrente continua è direttamente proporzionale alla tensione di rete applicata e inversamente proporzionale al flusso magnetico dello statore . Esistono due modi per regolare il regime del motore: modificando il flusso statorico F o la tensione U fornita al motore. Il controllo della velocità variando il campo magnetico della macchina viene effettuato tramite un reostato di regolazione nel circuito di eccitazione del motore. La tensione fornita al motore viene modificata regolando la tensione della sorgente.
È possibile aggiungere un reostato aggiuntivo al circuito dell'indotto. In questo caso, il reostato di avviamento viene sostituito da una zavorra R eccetera Un tale reostato svolge le funzioni sia di reostato di avviamento che di reostato di regolazione. In questo caso, l'equazione della frequenza di rotazione dell'indotto per un motore CC ha la forma
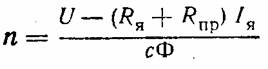
Da ciò ne consegue che la regolazione del regime del motore può essere effettuata variando la tensione di rete, la resistenza del reostato ballast o il flusso statorico.
Inversione del motore. Dall'equazione della coppia del motore M em = KFio io ne consegue che l'inversione, cioè la variazione del senso di rotazione dell'indotto, può essere effettuata variando la direzione della corrente nell'avvolgimento di eccitazione (flusso F) o corrente di armatura.
Per invertire il motore "in movimento", viene modificata la direzione della corrente di armatura (commutando i cavi di armatura) e l'avvolgimento di eccitazione non viene commutato, poiché ha una grande induttanza e l'interruzione del suo circuito con la corrente è inaccettabile. L'inversione del motore scollegato viene eseguita anche cambiando la direzione della corrente nell'avvolgimento di campo (commutando le sue uscite).
3. Motore con eccitazione in serie
In un motore con eccitazione in serie ( fig.2.3a) la corrente di eccitazione è uguale alla corrente di armatura: io in = io un, quindi il flusso magnetico Ф è una funzione della corrente di carico io un. La natura di questa funzione varia a seconda dell'entità del carico. In io un <(0,8...0,9) I nom quando il sistema magnetico è insaturo, f=k f io un, e il coefficiente di proporzionalità Per f in una gamma significativa di carichi rimane pressoché costante. Con un ulteriore aumento del carico, il flusso F crescendo più lentamente di io un > io nom) possiamo presumerlo F=cost. Di conseguenza, cambiano anche le dipendenze. n=f(I un ), M=f(I un) (Riso. 2.3.b).
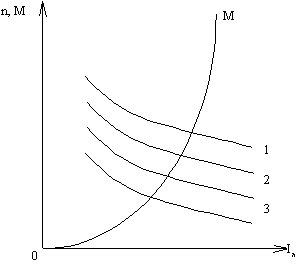
Riso. 2.3. - a) schema del motore con eccitazione sequenziale; b) la dipendenza della sua coppia e velocità di rotazione dalla corrente di armatura (I io – corrente di armatura; io in – corrente di eccitazione;r n
– resistenza al carico;
n- velocità di rotazione; uno - caratteristica naturale; 2,3 - caratteristiche reostatiche corrispondenti a diversi valori di resistenza aggiuntiva r n ).
Oltre alle caratteristiche naturali 1, è possibile ottenere una famiglia di caratteristiche reostatiche 2, 3 e 4 inserendo nel circuito dell'indotto resistenze aggiuntive rn n. Maggiore è il valore di r n, minore è la caratteristica.
A bassi carichi, la velocità n aumenta bruscamente e può superare il valore massimo consentito (il motore va in "spaziatura"). Pertanto, tali motori non possono essere utilizzati per azionare meccanismi che funzionano in modalità inattiva e a basso carico.
Con caratteristica rigida, la velocità di rotazione n quasi non dipende dal momento M, quindi la potenza:
![]() , dove DA 4
- costante.
, dove DA 4
- costante.
Con una caratteristica morbida del motore, n è inversamente proporzionale, per cui:
![]() , dove è una costante.
, dove è una costante.
Pertanto, quando il momento del carico cambia su un ampio intervallo, la potenza R 2 , e quindi il potere R 1 e attuale io un cambio per motori con eccitazione in serie in misura minore rispetto a un motore con eccitazione parallela, inoltre, tollerano meglio i sovraccarichi.
In questo motore, l'avvolgimento di campo è collegato in serie al circuito dell'indotto (Fig. 29.9, un), Ecco perchè flusso magneticoF dipende dalla corrente di carico io = io a = io dentro . A bassi carichi, il sistema magnetico della macchina non è saturo e la dipendenza del flusso magnetico dalla corrente di carico è direttamente proporzionale, cioè F = k f io un (K f- coefficiente di proporzionalità). In questo caso troviamo il momento elettromagnetico:
La formula della frequenza di rotazione assumerà la forma
 . (29.15)
. (29.15)
Sulla fig. 29.9, b dati sulle prestazioni presentati M = F(I) e n= (io) motore di eccitazione in serie. A carichi elevati, si verifica la saturazione del sistema magnetico del motore. In questo caso, il flusso magnetico praticamente non cambia all'aumentare del carico e le caratteristiche del motore diventano quasi rettilinee. La caratteristica della velocità del motore di eccitazione in serie mostra che la velocità del motore cambia in modo significativo al variare del carico. Questa caratteristica è chiamata morbido.
Riso. 29.9. Motore ad eccitazione sequenziale:
un- schema elettrico; b- caratteristiche di performance; c - caratteristiche meccaniche; 1 - caratteristica naturale; 2 - caratteristica artificiale
Con una diminuzione del carico del motore ad eccitazione sequenziale, la velocità di rotazione aumenta bruscamente e, con un carico inferiore al 25% del valore nominale, può raggiungere valori pericolosi per il motore ("overshoot ”). Pertanto, il funzionamento di un motore ad eccitazione in serie o il suo avviamento con un carico sull'albero inferiore al 25% del valore nominale è inaccettabile.
Per un funzionamento più affidabile, l'albero del motore ad eccitazione sequenziale deve essere rigidamente collegato al meccanismo di lavoro mediante un giunto e un ingranaggio. L'uso di una trasmissione a cinghia è inaccettabile, poiché se la cinghia è rotta o ripristinata, il motore potrebbe "esaurirsi". Data la possibilità di far funzionare il motore a velocità maggiori, i motori ad eccitazione in serie, secondo GOST, vengono testati per 2 minuti per superare la velocità del 20% al di sopra del massimo indicato sullo scudo di fabbrica, ma non meno del 50% al di sopra del valore nominale.
Caratteristiche meccaniche motore di eccitazione in serie n=f(M) sono presentati in fig. 29.9, in. Curve di caratteristiche meccaniche in forte calo ( naturale 1 e artificiale 2 ) forniscono al motore ad eccitazione sequenziale un funzionamento stabile sotto qualsiasi carico meccanico. La proprietà di questi motori di sviluppare una grande coppia proporzionale al quadrato della corrente di carico è importante, soprattutto in condizioni di avviamento difficili e durante i sovraccarichi, poiché con un graduale aumento del carico del motore, la potenza al suo ingresso aumenta più lentamente rispetto alla coppia. Questa caratteristica dei motori ad eccitazione in serie è uno dei motivi della loro ampia applicazione come motori di trazione nei trasporti, nonché motori per gru negli impianti di sollevamento, ovvero in tutti i casi di azionamento elettrico con condizioni di avviamento difficili e una combinazione di carichi significativi sull'albero motore a bassa velocità.
Cambio di velocità nominale del motore di eccitazione in serie
 , (29.16)
, (29.16)
dove n - velocità di rotazione a un carico del motore del 25% del nominale.
La velocità di rotazione dei motori di eccitazione in serie può essere controllata cambiando entrambi tensione U, o il flusso magnetico dell'avvolgimento di eccitazione. Nel primo caso, un aggiustamento reostato R rg (Fig. 29.10, un). Con un aumento della resistenza di questo reostato, la tensione all'ingresso del motore e la frequenza della sua rotazione diminuiscono. Questo metodo di controllo è utilizzato principalmente nei motori di piccola potenza. Nel caso di una potenza del motore significativa, questo metodo è antieconomico a causa delle grandi perdite di energia Rrg . Oltretutto, reostato R rg , calcolato sulla corrente di esercizio del motore, risulta essere ingombrante e costoso.
Quando più motori dello stesso tipo lavorano insieme, la velocità di rotazione viene regolata modificando lo schema della loro inclusione l'uno rispetto all'altro (Fig. 29.10, b). Quindi, quando i motori sono collegati in parallelo, ciascuno di essi è a piena tensione di rete e quando due motori sono collegati in serie, ogni motore rappresenta la metà della tensione di rete. Con il funzionamento simultaneo di un numero maggiore di motori, è possibile un numero maggiore di opzioni di commutazione. Questo metodo di controllo della velocità viene utilizzato nelle locomotive elettriche, dove sono installati diversi motori di trazione identici.
È possibile modificare la tensione fornita al motore quando il motore è alimentato da una sorgente CC con tensione regolata (ad esempio, secondo un circuito simile a Fig. 29.6, un). Al diminuire della tensione fornita al motore, le sue caratteristiche meccaniche diminuiscono, praticamente senza modificarne la curvatura (Fig. 29.11).
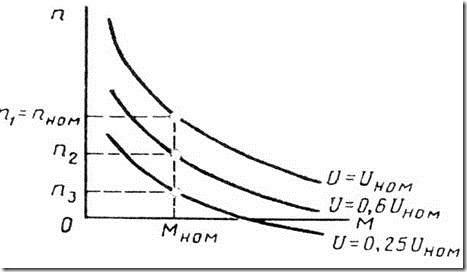
Riso. 29.11. Caratteristiche meccaniche di un motore ad eccitazione in serie con variazione della tensione di ingresso
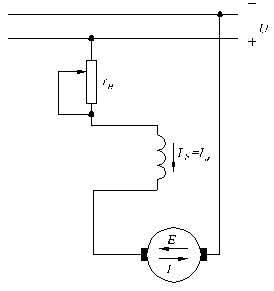
Esistono tre modi per regolare il regime del motore modificando il flusso magnetico: deviando l'avvolgimento di eccitazione con un reostato r rg , sezionando l'avvolgimento di eccitazione e deviando l'avvolgimento dell'indotto con un reostato r w . Accendere il reostato r rg , deviando l'avvolgimento di eccitazione (Fig. 29.10, in), così come una diminuzione della resistenza di questo reostato porta ad una diminuzione della corrente di eccitazione Io in \u003d io a - io rg , e di conseguenza, ad un aumento della velocità di rotazione. Questo metodo è più economico del precedente (vedi Fig. 29.10, un), è usato più spesso ed è stimato dal coefficiente di regolazione
 .
.
Di solito la resistenza del reostato r rg preso in modo che krg >= 50% .
Quando si seziona l'avvolgimento di campo (Fig. 29.10, G) lo spegnimento di parte dei giri dell'avvolgimento è accompagnato da un aumento della velocità di rotazione. Quando si sposta l'avvolgimento dell'indotto con un reostato r w (vedi fig. 29.10, in) la corrente di eccitazione aumenta Io in \u003d io a + io rg , che provoca una diminuzione della velocità di rotazione. Questo metodo di regolazione, sebbene fornisca una regolazione profonda, è antieconomico e viene utilizzato molto raramente.
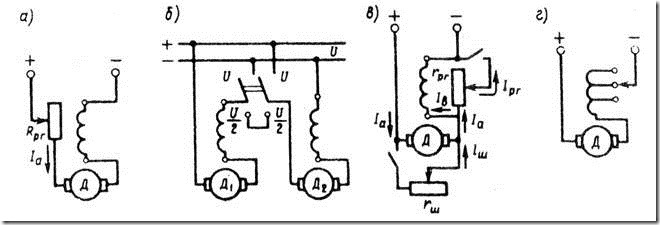
Riso. 29.10. Regolazione della velocità di rotazione dei motori ad eccitazione in serie
Ti consigliamo di leggere
 Caratteristiche psicologiche dei bambini in adolescenza
Caratteristiche psicologiche dei bambini in adolescenza Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola
Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa

