Clasificación del sistema regulación automática
Los sistemas de control automático utilizados en tecnología moderna, son bastante variados. Expansión rápida propósito funcional propósito funcional de los sistemas automáticos, que se hizo posible, en particular, debido a la introducción de la tecnología informática, aumenta el número de clases de sistemas realizadas. En estas condiciones, es casi imposible dar una clasificación completa y detallada de los sistemas de control automático. Las clasificaciones que se han aplicado con éxito en el pasado reciente ahora se están volviendo demasiado estrechas y no cubren los nuevos sistemas que se están desarrollando e implementando.
Cualquier clasificación se basa en ciertas características de clasificación. Desde el punto de vista de la generalidad de la clasificación de los sistemas de control automático, la característica de clasificación más conveniente es la información utilizada sobre el objeto de regulación. Cabe señalar que casi todos los sistemas automáticos son dispositivos no lineales que contienen tanto variables como parámetros distribuidos, en los que el valor de las variables en un momento dado puede depender no solo del valor actual, sino también de los valores pasados de estos. variables
Cada sistema automático se caracteriza por un algoritmo de funcionamiento, un conjunto de prescripciones que determinan la naturaleza del cambio en la variable controlada en función del impacto.
Dependiendo de la naturaleza del cambio en los componentes de la influencia motriz, los sistemas automáticos se dividen en cuatro clases:
- sistemas automáticos de estabilización, en los que la acción maestra es valor constante, y el valor controlado se mantiene automáticamente sin cambios con un cambio arbitrario en la carga y las condiciones externas. La carga del objeto regulado (par de carga en el eje del motor, carga del generador) en los sistemas de estabilización suele ser el principal efecto perturbador que afecta más fuertemente al valor controlado;
- sistemas de regulación programada, en los que la fuerza motriz y el valor regulado cambian según una ley predeterminada. Un sistema automático de software se puede considerar como un sistema de estabilización, en el que la tarea de estabilización se complica con la tarea de cambiar la variable controlada de acuerdo con un programa dado. Cambiar el valor controlado de acuerdo con el programa se logra agregando al sistema algún elemento de un dispositivo de software que cambia la acción de configuración en el tiempo de acuerdo con una ley predeterminada;
- los servosistemas implican cambiar la variable controlada de acuerdo con el cambio en la fuerza motriz, cuya ley de cambio es una función desconocida. Así, el servosistema, al igual que el sistema de software, reproduce la acción maestra. Sin embargo, este efecto en el sistema de seguimiento no cambia según un programa predeterminado, sino arbitrariamente. Por ejemplo, la antena del radar gira para seguir a la aeronave, cuya trayectoria no se conoce de antemano, es decir, la “sigue”. De aquí es de donde proviene el sistema de seguimiento de nombres. Las influencias maestras y los valores controlados de los servosistemas pueden tener un carácter diverso en su naturaleza física. Además, el valor controlado por su naturaleza física puede diferir de la acción de establecimiento.
-
Los sistemas de control óptimo proporcionan un mantenimiento óptimo del valor regulado según uno u otro criterio de optimización.
Según el modelo matemático que describe los procesos en los sistemas automáticos, se dividen en:
- sistemas automáticos lineales, cuyo modelo matemático se compone de ecuaciones diferenciales lineales o linealizadas. Si en la ecuación de la dinámica de cualquier eslabón de un sistema automático lineal hay al menos uno o varios coeficientes variables en el tiempo, entonces se obtiene un sistema automático lineal con parámetros variables. Si algún enlace se describe mediante ecuaciones diferenciales parciales lineales, entonces el sistema automático será un sistema automático lineal con parámetros distribuidos. Por el contrario, un sistema automático lineal ordinario es un sistema automático de parámetros agrupados. Si se describe la dinámica de cualquier enlace en el sistema automático ecuación lineal con un argumento retrasado, entonces el sistema automático se llama sistema automático lineal con retraso;
- sistemas automáticos no lineales, cuyo modelo matemático se compone de no lineales ecuaciones diferenciales. Los sistemas automáticos no lineales incluyen todos los sistemas automáticos, en cuyos enlaces existen características estáticas de cualquiera de los muchos tipos de no linealidad. Los no lineales pueden ser sistemas automáticos con parámetros variables, con parámetros distribuidos, con retardo, impulso y sistemas automáticos digitales, si se viola la linealidad de la ecuación dinámica en algún lugar de ellos.
Clasificación de los sistemas de control automático.
Cada sistema automático consta de una serie de enlaces, interconectados de forma adecuada. Cada enlace individual tiene una entrada y una salida que determinan el impacto y la transferencia de información de un enlace a otro. A caso general cualquier enlace puede tener varias entradas y salidas. Las cantidades de entrada y salida pueden ser de cualquier naturaleza física.
Durante el funcionamiento del sistema automático, los valores de entrada y salida cambian con el tiempo. La dinámica del proceso de conversión de señal en este enlace se describe mediante alguna ecuación que relaciona la variable de salida con la variable de entrada. El conjunto de ecuaciones y características de todos los eslabones describe la dinámica de los procesos de control o regulación en todo el sistema como un todo.
Las principales características de la división de los sistemas automáticos en grandes clases según la naturaleza de los procesos dinámicos internos son las siguientes:
- continuidad o discreción de los procesos dinámicos en el tiempo;
- linealidad o no linealidad de las ecuaciones que describen la dinámica de los procesos de control.
Dependiendo de la naturaleza del cambio en las señales de control, los sistemas automáticos se dividen en tres clases:
- sistemas continuos (analógicos), que se describen mediante ecuaciones diferenciales ordinarias y en el proceso de regulación, la estructura de todas las conexiones en el sistema permanece sin cambios. Las señales a la salida de los enlaces individuales de tal sistema son funciones continuas de influencias y tiempo. Existe una conexión funcional continua entre los enlaces a la entrada y salida del sistema automático. En este caso, la ley de cambio en el valor de salida en el tiempo puede ser arbitraria, dependiendo de la forma de cambio en el valor de entrada y de la forma de la ecuación de dinámica de enlace. Para que el sistema automático en su conjunto sea continuo, es necesario, en primer lugar, que las características estáticas de todos los enlaces sean continuas;
- sistemas discretos (digitales), que se describen mediante ecuaciones en diferencias diferenciales y en ellos, en intervalos de tiempo discretos, el circuito de acción de control se abre o se cierra. En los sistemas discretos, la apertura del circuito de acción se realiza de forma forzada y periódica mediante dispositivos especiales de interrupción. Dichos sistemas contienen elementos de impulso y realizan la cuantificación de la señal tanto en términos de nivel como de tiempo. Un enlace que convierte una señal de entrada continua en una secuencia de pulsos se denomina enlace de pulsos. Si el enlace posterior del sistema automático también es discreto, entonces no solo la salida, sino también el valor de entrada serán discretos. Los sistemas automáticos discretos incluyen sistemas automáticos de control de impulsos, así como sistemas automáticos para computadoras de control. Estos últimos dan el resultado del cálculo en la salida discretamente, a ciertos intervalos, en forma de números para valores numéricos discretos individuales de la cantidad de salida;
- sistemas de relés (discretos-continuos), que se describen mediante ambos tipos de ecuaciones. En estos sistemas, la apertura o cierre del circuito de acción se realiza por uno de los enlaces del sistema con un valor continuo de la acción de entrada. La apertura o el cierre se realiza mediante un relé o un enlace con una característica de relé. El relé se activa en ciertos valores de influencias en su órgano sensible. Los sistemas de relés realizan la cuantificación de las señales en el tiempo. La característica estática del enlace de retransmisión tiene puntos de ruptura.
Cada una de estas tres clases de sistemas automáticos se divide en subclases:
- sistemas automáticos estacionarios con parámetros agrupados o distribuidos;
- sistemas automáticos no estacionarios con parámetros agrupados o distribuidos.
En el estudio, cálculo y síntesis de los sistemas automáticos, se debe tener en cuenta que la teoría y los diversos métodos aplicados a los sistemas automáticos lineales ordinarios se encuentran muy desarrollados. Por lo tanto, en aras de la simplicidad del cálculo, siempre es deseable reducir el problema a una forma que permita aprovechar al máximo los métodos de estudio de los sistemas automáticos lineales ordinarios. Por lo general, las ecuaciones de dinámica de todos los eslabones de un sistema automático se intentan reducir a las lineales ordinarias, y solo para algunos eslabones, donde esto es inaceptable o donde se introduce especialmente un eslabón lineal o no lineal especial, estas propiedades especiales se tienen en cuenta.
Sin embargo, esto no significa en absoluto que al diseñar nuevos sistemas automáticos, uno deba esforzarse por sistemas automáticos lineales ordinarios. Por el contrario, es bastante obvio que los sistemas automáticos lineales ordinarios tienen capacidades limitadas. La introducción de enlaces lineales y no lineales especiales puede dar al sistema automático mejores cualidades. Los sistemas automáticos con no linealidades especialmente introducidas y los sistemas automáticos discretos, incluidos aquellos con computadoras de control y sistemas automáticos basados en microprocesadores, tienen posibilidades especialmente ricas.
Según el tipo y número de señales, los sistemas de control automático se dividen en:
- sistemas de un solo circuito en los que hay un valor ajustable;
- sistemas de circuitos múltiples en los que hay varias retroalimentaciones principales o locales;
- los sistemas de regulación incoherente están destinados a la regulación de varias cantidades, no están conectados entre sí y solo pueden interactuar a través de un objeto común de regulación.
a) en sistemas dependientes de control incoherente, un cambio en una de las variables controladas afecta el cambio en otras. Por lo tanto, en dichos sistemas, los procesos regulatorios no pueden considerarse de forma aislada unos de otros;
b) en sistemas independientes de control incoherente, el cambio en uno de los valores controlados no depende del cambio en los otros;
- los sistemas de regulación conectada asumen la presencia de varios reguladores, cuyos valores regulados tienen conexiones mutuas entre sí, realizadas además del objeto de la regulación.
Según la presencia o ausencia de un error de regulación, los ATS se dividen en:
- los sistemas estáticos son aquellos sistemas que asumen la presencia de un error de control constante (caída). característica distintiva trabajar sistema estático es que el equilibrio del sistema se puede alcanzar cuando valores diferentes cantidad regulada y cada valor de la cantidad regulada corresponde a un solo valor del organismo regulador;
- los sistemas astáticos son tales sistemas que, para varios valores de influencia externa en el objeto, no hay desviación del valor controlado del valor requerido. En tales sistemas, el estado de equilibrio tiene lugar en un solo valor de la variable controlada igual al dado, y el cuerpo regulador debe poder ocupar diferentes posiciones en el mismo valor de la variable controlada.
Principios del control automático
El principio de funcionamiento de cualquier sistema de control automático es detectar desviaciones de los valores controlados que caracterizan la operación del objeto regulado o el flujo del proceso del modo requerido y, al mismo tiempo, actuar sobre el objeto o proceso regulado. de tal manera que se eliminen estas desviaciones.
En el proceso de gestión, siempre hay Cantidades fisicas que necesitan ser cambiados de una manera estrictamente definida.
Los sistemas de control automático deben, en base a la medición de los valores regulados, formar acciones de control sobre el objeto regulado. El cambio del comportamiento del objeto regulado se puede llevar a cabo de acuerdo con los principios de ciclos abiertos o cerrados.
En un sistema automático abierto la acción de control se forma sobre la base del valor del valor especificado. En tales sistemas, no hay conexión entre la entrada y la salida. Como resultado, el flujo del proceso de control en sistemas abiertos no depende de los resultados, es decir, de cómo el sistema realiza sus funciones. En un sistema automático abierto, solo tiene lugar una acción directa: del operador al objeto regulado, de la entrada a la salida. El ejemplo más simple- el proceso de encender la iluminación eléctrica en la habitación.
Para que el valor regulado y(t) del objeto regulado tome el valor requerido, se aplica una acción de entrada x(t) a su entrada. Sin embargo, en la práctica, el valor controlado y(t) del objeto regulado se desvía del valor requerido por varias razones. Una de estas razones es la influencia de varios tipos de influencias perturbadoras externas f(t) sobre el objeto de regulación. Otra razón es la influencia de cambiar los parámetros del objeto regulado u otros elementos del sistema, es decir, la influencia de perturbaciones paramétricas (factores de ganancia, constantes de tiempo, etc.). La tercera razón que provoca la desviación de la variable controlada se debe al cambio en el valor requerido de la variable controlada (cambio en la temperatura requerida del horno de endurecimiento, cambio arbitrario en las coordenadas angulares del objetivo). Si el valor requerido de la variable regulada cambia, entonces para un cambio correspondiente en su valor real, es necesario cambiar la acción de control h(t) en la entrada del objeto regulado. Cuando la acción de control cambia en la entrada del objeto de control, que tiene inercia, ocurre un proceso transitorio, durante el cual el valor controlado no corresponderá al valor requerido.
La desviación del valor controlado del valor deseado puede ocurrir no solo en modo transitorio, sino también en modo dinámico constante, cuando el valor requerido cambia, por ejemplo, a una velocidad constante o aceleración constante. La desviación del valor controlado bajo la influencia de las razones enumeradas puede alcanzar valores inaceptablemente grandes, en los que se viola el proceso técnico proporcionado por el objeto. Por lo tanto, surge el problema de reducir las desviaciones de los valores de salida de los objetos de los valores requeridos. Esta tarea es la tarea principal de la gestión (regulación).
Es obvio que la necesidad de una acción de control surge en aquellos casos en que el proceso objeto de regulación se desvía de las prescripciones dadas por el algoritmo de funcionamiento.
El algoritmo de control en tales sistemas automáticos está determinado por las propiedades de los enlaces individuales o la naturaleza de las señales de entrada. Muchos sistemas automáticos funcionan según el principio de control de bucle abierto, que tienen un algoritmo de acciones predeterminado. Por ejemplo, arrancar un motor de combustión interna, encender un compresor en una locomotora, alimentar arena debajo juegos de ruedas, el proceso de carga de la batería, etc. Para el funcionamiento normal de tales sistemas automáticos, se deben observar una serie de medidas.
En este sistema, la acción de control puede ser generada por una persona. Comparando los valores reales y requeridos de la variable controlada, una persona puede identificar la desviación entre ellos, y de acuerdo con la magnitud y el signo de esta desviación, se determina la magnitud de la acción de control.
En primer lugar, la correspondencia completa entre los valores establecidos y reales de la variable controlada solo puede tener lugar si las características de los enlaces individuales del sistema automático son estables y se excluye la influencia de perturbaciones externas.
En segundo lugar, deben ajustarse cuidadosamente, es decir, cada posición del dispositivo de accionamiento debe corresponder estrictamente al valor de la variable controlada. Sin embargo, guardar los ajustes cuando las piezas están desgastadas o los elementos envejecen, así como cuando cambia la temperatura ambiente presenta una tarea difícil. Por lo tanto, los sistemas de lazo abierto no pueden proporcionar una alta precisión de control. No miden el resultado causado por la acción de control, y no toman acciones que influyan en este resultado para que corresponda al deseado.
En los sistemas automáticos cerrados, el valor controlado se compara con su valor establecido y se forma una acción de control sobre la base de la señal de error. El progreso del proceso de control automático depende de los resultados de esta comparación.
Para implementar dicho algoritmo de control, se introduce una conexión en el diseño del sistema automático, que se denomina retroalimentación, porque transmite una señal desde la salida del objeto regulado a la entrada del sistema automático en la dirección opuesta a la dirección de transmisión de la acción de control al objeto regulado.
La forma más fácil es plantar un operador humano que desempeñará el papel de retroalimentación, por ejemplo, en el proceso de control manual. vehículo ya sea un automóvil, un tractor, una locomotora, un avión o una nave espacial. En este caso, comparando las lecturas dispositivos de control, midiendo el valor real de la variable controlada (velocidad, potencia, empuje, altitud de vuelo, etc.), con su valor dado, el operador humano realiza un impacto adicional sobre el objeto controlado para lograr la desviación mínima de la variable controlada del valor establecido.
|

Por un lado, las acciones de un operador humano son elementalmente simples y, por otro lado, monitorear una multitud de dispositivos es bastante tedioso y puede ser realizado fácilmente por un dispositivo automático especial que compara el punto de ajuste y el valor real de los controlados. variable y, a partir de ella, forma una acción de control sobre el objeto regulado. Así aparecieron los primeros reguladores automáticos, destinados a sustituir el trabajo monótono e ineficaz de una persona con dispositivo automático. Tal dispositivo es regulador automático.
El objeto de regulación y el regulador automático forman un sistema cerrado.
En los sistemas automáticos cerrados, las acciones de un operador humano se reducen a la configuración inicial de un modo dado y al monitoreo general de los procesos en el sistema automático. La precisión de la regulación en sistemas automáticos cerrados, es decir, la precisión de mantener la relación funcional requerida entre la entrada y la salida, depende principalmente de la precisión con la que se compara el valor requerido y el real de la variable controlada.
Los sistemas de control automático de circuito cerrado difieren en el principio de regulación:
- por desviación;
- por indignación;
- combinado.
Sistemas de control automático basados en el principio de desviación, son los principales en la práctica de la automatización de varias instalaciones de producción. Se caracterizan por la presencia de realimentación, que suministra parte de la señal de salida a la entrada del sistema automático y forma un lazo de control cerrado. La esencia de este principio de control es que el valor real de la variable controlada se compara constantemente con su valor. h valor dado. Si existe una diferencia entre estos valores por encima de un umbral predeterminado, el sistema desarrolla una acción regulatoria encaminada a eliminar esa diferencia o reducirla a un cierto valor aceptable.
|

El valor requerido del valor regulado del sistema automático y(t) está determinado por la fuerza impulsora x(t) proveniente del dispositivo impulsor. La desviación del valor controlado y(t) del valor establecido puede ser causada tanto por la influencia de varios tipos de influencias perturbadoras como por un cambio en la acción de ajuste x(t). Para reducir o eliminar esta desviación, es necesario desarrollar una acción de control adecuada h(t) y aplicarla a la entrada del objeto de control. La acción de control cuando se usa el principio de control de desviación se genera como resultado de convertir la desviación Dx(t) de la variable controlada del valor establecido.
En los sistemas automáticos que funcionan según el principio de desviación, la acción de control h(t) se obtiene como resultado de la transformación de la señal de desviación, y no del propio factor que provocó la desviación, por ejemplo, la acción perturbadora f(t) (es decir, como resultado de la transformación de la consecuencia, y no de la causa misma), por lo que no puede tener un efecto inverso sobre el objeto sin demora en comparación con el efecto perturbador. En consecuencia, el principio de control de desviación no permite eliminar completamente la desviación, es decir, lograr una invariancia absoluta.
En los sistemas automáticos que funcionan según el principio de desviación, la acción de control se obtiene como resultado de la transformación de la desviación, que puede ser causada por varios factores. Por lo tanto, en estos sistemas, la desviación disminuye, independientemente de cuál de los factores la provoque. Dado que en los sistemas automáticos que funcionan según el principio de desviación, las desviaciones que se producen cuando cambian los parámetros de los elementos del sistema automático también disminuyen, entonces los sistemas automáticos cerrados serán menos sensibles a los cambios en los parámetros de sus elementos en comparación con los sistemas automáticos abiertos. , donde no se compensan las desviaciones causadas por cambios en los parámetros de sus elementos.
Los sistemas automáticos que funcionan según este principio tienen una alta precisión en el mantenimiento del valor controlado (debido a la presencia de un control constante de la diferencia entre los valores establecidos y reales), pero baja velocidad.
El bajo rendimiento de estos sistemas se debe a que
1. El circuito cerrado de control automático, creado por el controlador automático y la retroalimentación, incluye el objeto de regulación. En la práctica, el objeto de la regulación es casi siempre el eslabón más inercial del sistema automático;
2. No reaccionan a la causa que provoca la discrepancia entre el setpoint y el valor real de la variable controlada, sino a la consecuencia - la discrepancia entre el setpoint y el valor real de la variable controlada.
Para construir un sistema de control automático que funcione según el principio de desviación, en igualdad de condiciones, se requiere una cantidad mínima de información inicial sobre el objeto de la regulación. Casi toda la información sobre el objeto de la regulación se transmite a través de la retroalimentación. La presencia de realimentación se caracteriza por el hecho de que la aplicación de alguna influencia sobre el automatismo conlleva una contraacción que restablece el estado de todo el automatismo.
En el caso más simple, el controlador automático compara la señal de salida del sistema automático con la señal de referencia para averiguar qué tan correctamente el sistema automático realiza su tarea. La presencia de realimentación en un sistema automático cambia sus características estáticas y dinámicas. Gracias a la retroalimentación, un sistema automático puede ser más preciso y rápido, o viceversa, más lento. Puede hacer que el sistema automático sea estable o inestable.
Los sistemas que funcionan según el principio de desviación tienen las siguientes ventajas:
1) reducir la desviación de la variable controlada del valor requerido, independientemente de qué factores (influencias perturbadoras externas, cambios en los parámetros de los elementos del sistema, cambios en la acción de configuración) lo causaron;
2) son menos sensibles a los cambios en los parámetros de los elementos del sistema, en comparación con los sistemas abiertos.
Los sistemas que funcionan según el principio de desviación tienen las siguientes desventajas:
1) en sistemas simples de un solo lazo con el principio de control por desviación, no se puede lograr la invariancia absoluta;
2) en sistemas con principio de regulación por desviación, como en sistemas cerrados, surge el problema de la estabilidad.
Debido a las importantes ventajas del sistema con el principio de regulación por desviación, son ampliamente utilizados en tecnología.
Sistemas de control automático que funcionan según el principio de compensación de perturbaciones., están diseñados para reducir la influencia de las influencias perturbadoras en el objeto regulado midiendo estas influencias y compensando su influencia debido al impacto artificial inverso en el objeto regulado.
Al desarrollar este principio, los ingenieros partieron del supuesto de que para reducir o eliminar la desviación del valor controlado del valor establecido causada por la influencia de uno u otro factor, es necesario que la acción de control sea una función determinada de este factor y las características del objeto regulado.
Cuando se regula según el principio de compensación de perturbaciones, el problema es compensar la influencia de la perturbación en el valor controlado.
La información de trabajo en estos sistemas son influencias perturbadoras, mala influencia que están sujetos a compensación. Por lo tanto, en estos sistemas es posible compensar completamente la influencia de la acción perturbadora sobre la variable controlada, es decir, es posible lograr la invariancia (independencia) de la cantidad controlada con respecto a esta acción perturbadora. El método considerado puede compensar la influencia de cada una de las influencias perturbadoras por separado. Sin embargo, en la práctica, normalmente no es posible compensar la influencia de todas las influencias perturbadoras, ya que una parte importante de las influencias no se pueden medir, y al intentar compensar todas las posibles influencias perturbadoras, se obtiene un sistema extremadamente complejo.
Dichos sistemas automáticos requieren información inicial aún más completa que los sistemas automáticos que funcionan según el principio de desviación. De hecho, para compensar la influencia de cualquier perturbación en estado estacionario, y más aún en condiciones transitorias, es necesario conocer exactamente esta influencia.
En este caso, se selecciona una (principal) o dos (no más) perturbaciones y se determina cómo afectan a la variable controlada. La acción de control aplicada al objeto de regulación por el órgano ejecutivo depende de la perturbación para que los cambios en el valor controlado no sobrepasen los límites especificados. Dichos sistemas son simples y estables en operación, pero no son capaces de responder a otras perturbaciones que provocan una desviación de la variable controlada.
|

El principio de la compensación de perturbaciones es que para reducir o eliminar la desviación Dx(t) de la variable controlada respecto del valor de consigna provocada por la acción perturbadora f(t), se mide este efecto y, como resultado de su transformación, se genera la acción de control h(t) que, aplicada a la entrada del objeto regulado, provoca una desviación compensatoria del valor controlado y(t) de signo contrario a la desviación provocada por la influencia perturbadora f(t ). La perturbación f(t) se mide utilizando un compensador de perturbaciones. Algunos sistemas automáticos incluyen explícitamente actuadores y controles.
La señal sobre la perturbación хв(t) en el sumador se suma (resta) con la acción maestra, lo que determina el valor requerido de la variable controlada. El efecto total Dx(t) con la ayuda de un controlador automático (para este principio de control, en la mayoría de los casos, el controlador automático es un amplificador de potencia) se amplifica al valor necesario para obtener el modo de operación requerido del objeto regulado . La acción de control h(t) así formada entra en la entrada del objeto regulado y compensa la influencia de la acción perturbadora.
Un sistema automático que funciona según el principio de compensación de perturbaciones es un sistema automático de bucle abierto. En él, el proceso de regulación no depende de los resultados de la operación del sistema automático (no se mide el valor controlado y no se actúa si no corresponde al valor requerido) y solo se observa un efecto directo.
Un sistema automático que funciona según este principio tiene una alta velocidad, pero una baja precisión en el mantenimiento del valor controlado. La alta velocidad está garantizada por el hecho de que el controlador automático no reacciona al efecto de la influencia de la influencia perturbadora (desviación de la variable controlada), sino a la causa: el cambio en la acción perturbadora, preparando el objeto de control de antemano para una posible desviación de la variable controlada.
Los sistemas automáticos que funcionan según el principio de compensación de perturbaciones tienen las siguientes ventajas:
1) permitirle compensar completamente las principales influencias perturbadoras, es decir, en estos sistemas es posible lograr la invariancia de la variable controlada con respecto a las influencias perturbadoras;
2) en ellos, como en cualquier sistema abierto, no hay problema de estabilidad.
Los sistemas automáticos que funcionan según el principio de compensación de perturbaciones tienen las siguientes desventajas:
1) eliminan la influencia de solo las principales influencias perturbadoras, para las cuales se crean canales de compensación;
2) hay una desviación del valor controlado del valor requerido como resultado de un cambio en las influencias perturbadoras secundarias, para las cuales no hay canales de compensación;
3) en estos sistemas, como en los sistemas abiertos, aparecen desviaciones del valor controlado con un cambio en las características del objeto y elementos del sistema automático;
4) la aplicación del principio de control de perturbaciones se limita a objetos cuyas características se conocen o pueden determinarse.
Los sistemas que funcionan según el principio de compensación de perturbaciones tienen aplicaciones particulares.
Sistemas de control automático que funcionan según el principio combinado., combine el principio de compensación de perturbaciones y el principio de desviación. Dichos sistemas automáticos combinan los aspectos positivos de los principios de control automático discutidos anteriormente y eliminan sus deficiencias.
|
En tales sistemas, además del lazo de control de desviación cerrado principal, el sistema automático combinado contiene un lazo de compensación para una o más perturbaciones. La cantidad de información de trabajo en el sistema automático combinado es mayor que en los sistemas anteriores. Aquí, la información sobre la influencia perturbadora se agrega a la información operativa sobre la desviación de la variable controlada.
En los sistemas automáticos combinados, el principio de regulación por desviación se implementa con la ayuda de la retroalimentación principal y el principio de control por perturbación con la ayuda de enlaces de compensación. Si el error más significativo es causado por la acción perturbadora f(t), entonces se introduce una conexión para esta perturbación, pero si tal error se obtiene debido a un cambio en la acción de ajuste x(t), entonces la conexión para la la acción de ajuste está determinada por el algoritmo de control automático.
En los sistemas automáticos combinados, la conexión de compensación de la perturbación principal (acción impulsora) elimina el componente del error causado por esta perturbación (cambio de la influencia impulsora), y como resultado de la acción de retroalimentación, los errores causados por influencias perturbadoras secundarias, para los que no existen conexiones de compensación, se reducen. Si con la ayuda de enlaces de compensación no se eliminan por completo los errores causados por las principales influencias perturbadoras (ajuste), entonces los errores residuales también se reducen con la ayuda de la retroalimentación.
Para formar una acción de control en sistemas automáticos combinados, se utilizan tanto información directa sobre las principales influencias perturbadoras (cambio en la acción maestra) como la desviación de la variable controlada del valor requerido causada por todas las influencias perturbadoras (cambio en la acción maestra). . De este modo:
1) en sistemas automáticos combinados, con la ayuda de enlaces compensatorios, es posible lograr una compensación total de los errores causados por las principales influencias perturbadoras y maestras (es posible lograr la invariancia);
2) junto con la posibilidad de compensación total de errores causados por las influencias principales, en sistemas automáticos combinados, con la ayuda de retroalimentación, los errores causados por influencias perturbadoras secundarias, para las cuales no hay conexiones de compensación, así como errores subcompensados de las principales influencias, se reducen;
3) si se violan las condiciones para compensar la acción perturbadora, el error resultante se reduce mediante un sistema automático cerrado, es decir, los sistemas automáticos combinados son menos sensibles a los cambios en los parámetros de los canales abiertos que los sistemas automáticos abiertos;
4) debido a la presencia de canales de compensación abiertos en los sistemas automáticos combinados, el problema de la estabilidad no es tan agudo como en los sistemas automáticos cerrados.
Naturalmente, la precisión de la regulación, alcanzable en sistemas combinados, es mayor que la precisión de todos los demás sistemas automáticos. En la práctica, tales sistemas automáticos son complejos y costosos.
Por lo tanto, los sistemas automáticos combinados son los sistemas más avanzados con una alta precisión en el mantenimiento del valor controlado. Sobre los principios considerados, no solo se construyen sistemas técnicos de control automático, sino también sistemas de control en la sociedad y sistemas regulatorios en organismos vivos. Por lo tanto, los métodos de investigación sistemas tecnicos la regulación automática hasta cierto punto se puede utilizar para estudiar los sistemas de control en la sociedad y la vida silvestre.
Introducción 5
Desarrollo de un diagrama funcional de un sistema de control automático (ACS) 6
Desarrollo de ecuaciones diferenciales y funciones de transferencia de elementos del sistema. 7
Desarrollo diagrama de bloques 11 rupias
Transformación del esquema estructural de la ACS a la forma canónica 12
Análisis de estabilidad ACS por criterios algebraicos 13
Cálculo y construcción de procesos transitorios a lo largo de los canales de influencias reguladoras y perturbadoras. quince
Evaluación transitoria de la calidad 17
aplicación de gráficos 19
Referencias 22
Introducción
En el diseño funcional de los sistemas de control automático, los métodos de la teoría del control automático se utilizan con mayor frecuencia. El sistema automático consta de una serie de dispositivos técnicos con ciertas propiedades funcionales y dinámicas. Para su descripción y estudio, un sistema automático se representa por un determinado conjunto de elementos dotados de las propiedades correspondientes.
Los objetos técnicos reales se describen mediante ecuaciones diferenciales y algebraicas no lineales. Pero dado que en la etapa inicial de diseño, se resuelven las tareas de evaluación preliminar de soluciones técnicas y pronósticos, se pueden usar modelos matemáticos relativamente simples para estos fines. En este sentido, las ecuaciones no lineales del modelo matemático están sujetas a linealización.
La descripción de los sistemas automáticos se simplifica mucho utilizando los métodos del cálculo operativo. Usando la transformada de Laplace, la ecuación diferencial lineal se reduce a ecuación algebraica con variables complejas.
Desarrollo de un diagrama funcional de un sistema de control automático (sar)
ACS puede representarse por dos partes principales: el objeto de regulación y el dispositivo regulador: el regulador.
El estado del objeto está determinado por una serie de valores que caracterizan:
Impacto en el objeto de los dispositivos de regulación;
Influencia en el objeto del entorno externo;
El flujo de procesos dentro del propio objeto.
En general, el objeto de la regulación puede ser representado por el siguiente esquema:
Arroz. 1. Esquema del objeto de regulación
Donde Z es la totalidad de las influencias externas controladas;
F - influencias externas incontroladas;
X – influencias regulatorias;
U - valores ajustables.
En nuestro caso, el objeto (generador de CC) tiene un efecto ajustable (corriente forzada i c) y un valor ajustable (voltaje de sujeción U n) y se denomina simple o de conexión única.
El comportamiento del objeto regulado se puede considerar en los modos de estática y dinámica. Un diagrama funcional es un diagrama en el que cada elemento funcional del sistema corresponde a un enlace determinado. El diagrama esquemático del ATS desarrollado se muestra en el apéndice gráfico.
Para este ACS, el diagrama funcional se ve así:
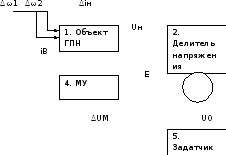
Figura 2. Diagrama funcional del ATS
Donde 1 - el objeto de la regulación - un generador de voltaje constante;
2 – divisor de tensión;
3 - dispositivo de comparación, es un nodo estimulante;
4 - amplificador (en nuestro caso, un amplificador magnético con automagnetización);
5 - setter - dispositivo para configurar la instalación.
La corriente de carga del amplificador magnético es una variable de control, por lo que no hay actuador en el diagrama funcional.
Principio de funcionamiento:
El valor regulado es el voltaje U n en las terminales del generador, que se compara con el voltaje de referencia U 0 a través del divisor K (U 1) el desajuste E se alimenta al devanado de control del amplificador magnético. La carga del amplificador magnético es la corriente en el devanado de excitación del excitador del generador auxiliar.
El ajuste viene dado por el divisor de tensión regulable R 1 , que establece la correspondencia entre la tensión regulada U n y la tensión de referencia U 0 .
Las influencias perturbadoras e incontroladas son: caída de tensión en los devanados del generador causada por la corriente de carga i n; interferencia causada por la corriente de carga i n; interferencia causada por un cambio en la velocidad de rotación de los ejes del generador ω 1 y ω 2 ; fluctuación de la tensión de alimentación del amplificador magnético ∆U n.
De acuerdo con la tarea en nuestro diagrama funcional, los valores de entrada y salida se indican para cada bloque funcional. También se muestran las acciones de las influencias perturbadoras.
Según el principio de regulación sistemas de control automático se dividen en cuatro clases.
1. Sistema de estabilización automática: un sistema en el que el controlador mantiene un valor fijo constante del parámetro controlado.
2. Sistema de control de programa: un sistema que proporciona un cambio en el parámetro controlado de acuerdo con una ley predeterminada (en el tiempo).
3. Sistema de seguimiento: un sistema que proporciona un cambio en el parámetro controlado dependiendo de algún otro valor.
4. Sistema de control extremo: un sistema en el que el regulador mantiene el valor de la variable controlada que es óptimo para las condiciones cambiantes.
para regulación régimen de temperatura Se utilizan instalaciones de calefacción eléctrica, principalmente sistemas de las dos primeras clases.
Los sistemas automáticos de control de temperatura se pueden dividir en dos grupos según el tipo de acción: Regulación intermitente y continua.
Reguladores automáticos para caracteristicas funcionales se dividen en cinco tipos: posicionales (relé), proporcionales (estáticas), integrales (aestáticas), isodrómicas (proporcionales-integrales), isodrómicas con avance y con primera derivada.
Los reguladores posicionales se denominan ACS intermitentes y otros tipos de reguladores se denominan ACS continuos. A continuación se presentan las principales características de los controladores posicionales, proporcionales, integrales e isodrómicos, que son los más utilizados en los sistemas automáticos de control de temperatura.
(Fig. 1) consta de un objeto de control 1, un sensor de temperatura 2, un dispositivo de programación o un ajustador de nivel de temperatura 4, un controlador 5 y un actuador 8. En muchos casos, un amplificador primario 3 se coloca entre el sensor y el dispositivo de programación, y entre el controlador y dispositivo ejecutivo- amplificador secundario 6. El sensor adicional 7 se usa en sistemas de control isodrómico.
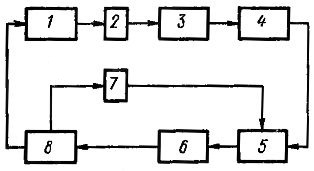
Arroz. 1. Diagrama funcional del control automático de temperatura.
Controladores de temperatura posicionales (relé)
Los reguladores posicionales son aquellos en los que el órgano regulador puede ocupar dos o tres cargos específicos. En las instalaciones de calefacción eléctrica se utilizan reguladores de dos y tres posiciones. Son simples y fiables en funcionamiento.
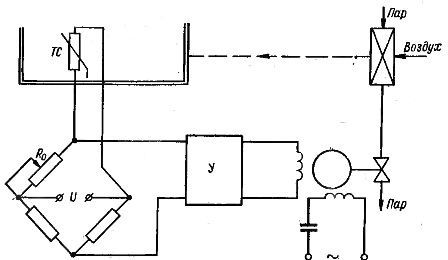
En la fig. 2 mostrados diagrama de circuito Regulación de dos posiciones de la temperatura del aire.
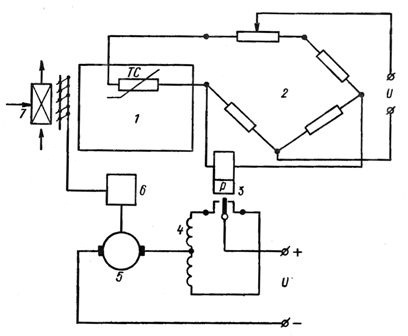
Arroz. 2. Diagrama esquemático del control de temperatura del aire de encendido y apagado: 1 - objeto de control, 2 - puente de medición, 3 - relé polarizado, 4 - devanados de excitación del motor, 5 - armadura del motor, 6 - reductor, 7 - calorífico.
Para controlar la temperatura en el objeto regulado se utiliza la resistencia térmica TS, la cual se encuentra incluida en uno de los brazos del puente de medición 2. Los valores de la resistencia del puente se seleccionan para que a una temperatura dada el puente está balanceada, es decir, el voltaje en la diagonal del puente es cero. Cuando la temperatura sube, el relé polarizado 3, incluido en la diagonal del puente de medición, enciende uno de los devanados 4 del motor eléctrico. corriente continua, que, con la ayuda del reductor 6, cierra válvula de aire frente al calentador 7. Cuando baja la temperatura, la válvula de aire se abre completamente.
Con el control de temperatura de dos posiciones, la cantidad de calor suministrada se puede establecer solo en dos niveles: máximo y mínimo. La cantidad máxima de calor debe ser más de la necesaria para mantener la temperatura controlada deseada, y la mínima debe ser menor. En este caso, la temperatura del aire fluctúa alrededor del valor establecido, es decir, el llamado modo auto oscilatorio(Fig. 3, a).
Las líneas correspondientes a las temperaturas τ n y τ in definen los límites inferior y superior de la zona muerta. Cuando la temperatura del objeto regulado, disminuyendo, alcanza el valor τ n, la cantidad de calor suministrada aumenta instantáneamente y la temperatura del objeto comienza a aumentar. Habiendo alcanzado el valor τ en, el regulador reduce el suministro de calor y la temperatura desciende.
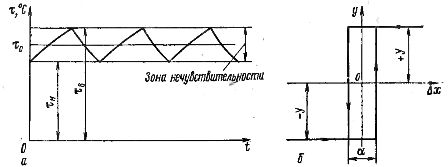
Arroz. 3. Tiempo de respuesta del control de encendido y apagado (a) y respuesta estática del controlador de encendido y apagado (b).
La tasa de aumento y disminución de la temperatura depende de las propiedades del objeto regulado y de su característica de tiempo (curva de aceleración). Las fluctuaciones de temperatura no van más allá de la zona muerta si los cambios en el suministro de calor provocan inmediatamente cambios de temperatura, es decir, si no hay retraso del objeto controlado.
Con una disminución en la zona muerta, la amplitud de las fluctuaciones de temperatura disminuye hasta cero en τ n = τ c. Sin embargo, esto requiere que el suministro de calor varíe a una frecuencia infinitamente alta, lo que es extremadamente difícil de implementar en la práctica. En todos los objetos reales de regulación hay un retraso. El proceso de regulación en ellos procede aproximadamente de la siguiente manera.
Cuando la temperatura del objeto regulado cae al valor τ n, el suministro de calor cambia instantáneamente; sin embargo, debido a la demora, la temperatura continúa disminuyendo durante algún tiempo. Luego sube al valor τ en el que el suministro de calor disminuye instantáneamente. La temperatura continúa aumentando durante algún tiempo, luego, debido a la reducción del suministro de calor, la temperatura desciende y el proceso se repite nuevamente.
En la fig. 3, b se muestra característica estática del controlador de encendido/apagado. De ello se deduce que el impacto reglamentario sobre el objeto puede tomar solo dos valores: máximo y mínimo. En el ejemplo considerado, el máximo corresponde a la posición en la que la válvula de aire (ver Fig. 2) está completamente abierta, el mínimo, cuando la válvula está cerrada.
El signo de la acción de control está determinado por el signo de la desviación del valor regulado (temperatura) de su valor establecido. La magnitud de la acción de control es constante. Todos los controladores de encendido y apagado tienen una zona de histéresis α, que se produce debido a la diferencia en las corrientes de operación y liberación del relé electromagnético.
Ejemplo de uso del control de temperatura de encendido/apagado:
Controladores de temperatura proporcionales (estáticos)
En los casos en que se requiera una alta precisión de control o cuando un proceso de autooscilación sea inaceptable, aplique controladores con proceso de control continuo. Éstos incluyen reguladores proporcionales (reguladores P) adecuado para controlar una amplia variedad de procesos tecnológicos.
En los casos en que se requiere una alta precisión de control o cuando un proceso autooscilante es inaceptable, se utilizan reguladores con un proceso de control continuo. Estos incluyen reguladores proporcionales (reguladores P), adecuados para regular una amplia variedad de procesos tecnológicos.
En los sistemas de control automático con reguladores P, la posición del cuerpo regulador (y) es directamente proporcional al valor del parámetro controlado (x):
y=k1х,
donde k1 es el factor de proporcionalidad (ganancia del controlador).
Esta proporcionalidad se produce hasta que el cuerpo regulador alcanza sus posiciones extremas (finales de carrera).
La velocidad de movimiento del cuerpo regulador es directamente proporcional a la tasa de cambio del parámetro controlado.
En la fig. 4 muestra un diagrama esquemático de un sistema para controlar automáticamente la temperatura ambiente usando un controlador proporcional. La temperatura ambiente se mide con una termorresistencia TC incluida en el circuito puente de medida 1.

Arroz. 4. Esquema de control proporcional de la temperatura del aire: 1 - puente de medición, 2 - objeto de control, 3 - intercambiador de calor, 4 - motor de condensador, 5 - amplificador sensible a la fase.
A una temperatura dada, el puente está equilibrado. Cuando la temperatura controlada se desvía del valor establecido, aparece una tensión de desequilibrio en la diagonal del puente, cuya magnitud y signo dependen de la magnitud y el signo de la desviación de temperatura. Este voltaje es amplificado por un amplificador sensible a la fase 5, a cuya salida el devanado de un bifásico motor condensador 4 actuadores.
El actuador mueve el elemento de control, cambiando el flujo de refrigerante en el intercambiador de calor 3. Simultáneamente con el movimiento del elemento de control, cambia la resistencia de uno de los brazos del puente de medición, como resultado de lo cual cambia la temperatura, en que el puente está equilibrado.
Así, debido a una retroalimentación rígida, cada posición del cuerpo regulador corresponde a su propio valor de equilibrio de la temperatura controlada.
Un controlador proporcional (estático) se caracteriza por regulación desigual residual.
En el caso de una desviación abrupta de la carga del valor establecido (en el momento t1), el parámetro controlado volverá después de un cierto período de tiempo (el momento t2) a un nuevo valor estable (Fig. 4). Sin embargo, esto solo es posible con una nueva posición del ente regulador, es decir, con un nuevo valor del parámetro controlado, que difiera del valor establecido por δ.

Arroz. 5. Características temporales del control proporcional
La desventaja de los controladores proporcionales es que cada valor de parámetro corresponde a una sola posición específica del regulador. Para mantener el valor establecido del parámetro (temperatura) cuando cambia la carga (consumo de calor), es necesario que el cuerpo regulador tome una posición diferente correspondiente al nuevo valor de carga. Esto no sucede en un controlador proporcional, lo que resulta en una desviación residual de la variable controlada.
Integral (reguladores astáticos)
Integral (astático) se denominan reguladores a aquellos en los que, cuando el parámetro se desvía del valor establecido, el cuerpo regulador se mueve más o menos lentamente y todo el tiempo en una dirección (dentro de la carrera de trabajo) hasta que el parámetro vuelve a tomar el valor establecido. La dirección de carrera del cuerpo regulador cambia solo cuando el parámetro pasa por el valor establecido.
En los reguladores integrales de acción eléctrica se suele crear artificialmente una zona muerta, dentro de la cual un cambio en un parámetro no provoca el movimiento del cuerpo regulador.
La velocidad de movimiento del cuerpo regulador en el regulador integral puede ser constante y variable. Una característica del controlador integral es la ausencia de una relación proporcional entre los valores establecidos del parámetro controlado y la posición del organismo regulador.
En la fig. 6 muestra un diagrama esquemático de un sistema de control de temperatura automático usando un controlador integrado. En él, a diferencia del circuito de control de temperatura proporcional (ver Fig. 4), no hay retroalimentación dura.
Arroz. 6. Esquema regulación integral temperatura del aire
En un controlador integral, la velocidad del cuerpo regulador es directamente proporcional a la desviación del parámetro controlado.
El proceso de control de temperatura integral con un cambio abrupto en la carga (consumo de calor) se muestra en la fig. 7 con la ayuda de las características del tiempo. Como se puede ver en el gráfico, la variable controlada con control integral vuelve lentamente al valor establecido.

Arroz. 7. Características temporales de la regulación integral
Controladores isodrómicos (proporcionales-integrales)
Regulación isodrómica tiene las propiedades de regulación proporcional e integral. La velocidad de movimiento del cuerpo regulador depende de la magnitud y velocidad de la desviación del parámetro controlado.
Si el parámetro controlado se desvía del valor establecido, la regulación se realiza de la siguiente manera. Inicialmente, el cuerpo regulador se mueve dependiendo de la magnitud de la desviación del parámetro controlado, es decir, se produce una regulación proporcional. Luego, el cuerpo regulador realiza un movimiento adicional, que es necesario para eliminar la falta de uniformidad residual (regulación integral).
Se puede obtener un sistema de control de temperatura del aire isodrómico (Fig. 8) reemplazando la retroalimentación rígida en el circuito de control proporcional (ver Fig. 5) con una retroalimentación elástica (desde el regulador hasta el deslizador de resistencia de retroalimentación). La realimentación eléctrica en el sistema isodrómico se realiza mediante un potenciómetro y se introduce en el sistema de control a través de un circuito que contiene la resistencia R y la capacitancia C.
Durante los procesos transitorios, la señal de retroalimentación, junto con la señal de desviación de parámetros, afecta a los elementos posteriores del sistema (amplificador, motor eléctrico). Cuando el cuerpo regulador está estacionario, en cualquier posición que esté, a medida que se carga el capacitor C, la señal de retroalimentación decae (en el estado estacionario es igual a cero).
Arroz. 8. Esquema de control de temperatura del aire isodrómico.
Es típico para el control isodrómico que la falta de uniformidad del control (error relativo) disminuya con el aumento del tiempo, acercándose a cero. En este caso, la realimentación no provocará desviaciones residuales del valor controlado.
Por lo tanto, el control isodrómico conduce a resultados mucho mejores que el control proporcional o integral (sin mencionar el control posicional). El control proporcional debido a la presencia de retroalimentación rígida ocurre casi instantáneamente, isodrómico, lentamente.
Sistemas de software para el control automático de la temperatura
Para implementar el control del programa, es necesario influir continuamente en la configuración (punto de referencia) del controlador para que el valor controlado cambie de acuerdo con una ley predeterminada. Para ello, la unidad de sintonización del controlador se suministra con un elemento de software. Este dispositivo sirve para establecer la ley de cambio del valor dado.
Durante la calefacción eléctrica, el actuador ACS puede actuar para encender o apagar secciones de los elementos de calefacción eléctrica, cambiando así la temperatura de la instalación calentada de acuerdo con un programa dado. El control por software de la temperatura y la humedad del aire es muy utilizado en instalaciones de clima artificial.
La teoría moderna del control automático es la parte principal de la teoría del control. El sistema de control automático consiste en un objeto ajustable y controles que actúan sobre el objeto cuando cambia una o más variables ajustables. Bajo la influencia de las señales de entrada (control o perturbación), las variables controladas cambian. El propósito de la regulación es formar tales leyes, bajo las cuales las variables reguladas de salida diferirían poco de los valores requeridos. La solución de este problema en muchos casos se complica por la presencia de perturbaciones aleatorias (ruido). En este caso, es necesario elegir una ley de control en la que las señales de control pasen por el sistema con bajas distorsiones y las señales de ruido prácticamente no se transmitan.
La teoría del control automático ha recorrido un largo camino en su desarrollo. En la etapa inicial, se crearon métodos para analizar la estabilidad, calidad y precisión de la regulación de sistemas lineales continuos. Entonces los métodos de análisis de discreto y discreto- sistemas continuos. Se puede notar que los métodos para calcular sistemas continuos se basan en métodos de frecuencia, y los métodos para calcular sistemas discretos y continuos discretos se basan en métodos de transformada z.
Actualmente se están desarrollando métodos para el análisis de sistemas de control automático no lineales. La violación del principio de superposición en sistemas no lineales, la presencia de una serie de regímenes alternos (dependiendo del impacto) de movimientos estables, inestables y autooscilaciones complican su análisis. El diseñador encuentra dificultades aún mayores al calcular sistemas de control extremos y autoajustables.
Tanto la teoría del control automático como la teoría del control se incluyen en la ciencia bajo el nombre general de "cibernética técnica", que ahora ha recibido un desarrollo significativo. La cibernética técnica estudia los patrones generales de los complejos sistemas de control dinámico para fines tecnológicos y procesos de producción. cibernética técnica, Control automático y el control automático se están desarrollando en dos direcciones principales: la primera está asociada con el progreso y la mejora constantes en el diseño de elementos y la tecnología de su fabricación; el segundo, con el uso más racional de estos elementos o sus grupos, que es la tarea de diseñar sistemas.
El diseño de sistemas de control automático puede realizarse de dos formas: por el método de análisis, cuando, con una estructura de sistema preseleccionada (por cálculo o modelado), se determinan sus parámetros;
por el método de síntesis, cuando, de acuerdo con los requisitos, se elige inmediatamente la mejor estructura y parámetros para el sistema. Ambos métodos son ampliamente uso práctico y por lo tanto están completamente cubiertos en este libro.
Determinar los parámetros de un sistema, cuando se conocen su estructura y los requisitos para todo el sistema como un todo, se refiere al problema de la síntesis. La solución a este problema con un objeto de control lineal se puede encontrar utilizando, por ejemplo, métodos de frecuencia, el método del lugar geométrico de las raíces o estudiando las trayectorias de las raíces de la ecuación característica de un sistema cerrado. Selección de un dispositivo corrector por síntesis en el aula funciones racionales fraccionarias variable compleja se puede realizar utilizando métodos gráfico-analíticos. Los mismos métodos hacen posible sintetizar dispositivos correctivos que suprimen modos periódicos inestables y auto-oscilantes en sistemas no lineales.
Los métodos de síntesis se desarrollaron aún más sobre la base de los principios de programación máxima y dinámica, cuando se determina la ley de control óptima desde el punto de vista de un criterio de calidad dado, que proporciona el límite superior de la calidad del sistema, que debe ser buscado al diseñarlo. Sin embargo, la solución de este problema prácticamente no siempre es posible debido a la complejidad de la descripción matemática de los procesos físicos en el sistema, la imposibilidad de resolver el problema de optimización en sí mismo y las dificultades en la implementación técnica de la ley de control no lineal encontrada. Cabe señalar que la implementación de leyes de control complejas solo es posible cuando se incluye una computadora digital en el bucle del sistema. La creación de sistemas extremos y autoajustables también está asociada al uso de computadoras analógicas o digitales.
La formación de sistemas de control automático, por regla general, se realiza sobre la base de métodos analíticos de análisis o síntesis. En esta etapa de diseño de sistemas de control, con base en los supuestos aceptados, se compila un modelo matemático del sistema y se selecciona su estructura preliminar. Dependiendo del tipo de modelo (lineal o no lineal), se elige un método de cálculo para determinar los parámetros que proporcionan los indicadores especificados de estabilidad, precisión y calidad. Después de eso, el modelo matemático se refina y, utilizando los medios modelo matematico determinar procesos dinámicos en sistema Bajo la acción de varias señales de entrada, se toman las características de frecuencia y se comparan con las calculadas. Luego se establecen finalmente los márgenes de estabilidad del sistema en fase y módulo y se encuentran los principales indicadores de calidad.
Además, establecer acciones de control típicas en el modelo; eliminar las características de precisión. Sobre la base de modelos matemáticos, se elaboran los requisitos técnicos para el equipo del sistema. Se ensambla un controlador a partir del equipo fabricado y se transfiere a un modelado seminatural, en el que el objeto de control se recopila en forma de modelo matemático.
En base a las características obtenidas como resultado del modelado HIL, se toma una decisión sobre la idoneidad del controlador para trabajar con un objeto real de regulación. La selección final de los parámetros del controlador y su ajuste se realiza en condiciones naturales durante el desarrollo experimental del sistema de control.
El desarrollo de la teoría de control automático basada en las ecuaciones de estado y transformadas z, el principio máximo y el método de programación dinámica mejora el método de diseño de sistemas de control y permite crear sistemas automáticos altamente eficientes para la mayoría diversas industrias Economía nacional.
Los sistemas de control automático obtenidos de esta manera aseguran la alta calidad de los productos, reducen su costo y aumentan la productividad laboral.
Le recomendamos que lea
, diagnóstico, tratamiento Tratamiento de la clamidia urogenital") Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital
Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué
Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército?
Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército? Manzanas al horno con requesón Manzanas al horno con requesón
Manzanas al horno con requesón Manzanas al horno con requesón

