Mayroong ilang mga klase ng mga de-koryenteng converter, kung saan praktikal na gamit natagpuan ang tinatawag na inductive analogues. Sa kanila, ang conversion ng enerhiya ay nangyayari dahil sa conversion ng induction ng windings, na isang mahalagang bahagi ng yunit mismo. Ang windings ay matatagpuan sa dalawang elemento - sa stator at rotor. Kaya, ano ang pagkakaiba sa pagitan ng isang stator at isang rotor (ano sila at ano ang kanilang mga pag-andar?).
Sa ganitong paraan, ang electrical peak load ay nabawasan sa isang ikatlo, ang pagkonsumo ng enerhiya ay nananatiling magkapareho. Ang mga mamimili ng kuryente gaya ng mga amusement park ay karaniwang sinisingil ayon sa kanilang pinakamataas na load sa Europe at maaaring makabuluhang bawasan ang kanilang mga gastos sa pagpapatakbo sa pamamagitan ng pag-iimbak ng enerhiya. Bilang isang mapagkukunan, gumamit siya ng isang set ng 320 galvanic cells. Dahil sa mataas na presyo ng baterya, kailangan niyang ihinto ang pagsubok. Ngayon hindi natin magagawa nang walang mga de-koryenteng motor, ginagamit ang mga ito halos lahat ng dako.
Ang pinakasimpleng kahulugan ng dalawang bahagi ng isang transduser ay ang kanilang pag-andar. Ang lahat ay simple dito: ang stator (electric motor o generator) ay isang nakapirming bahagi, ang rotor ay palipat-lipat. Sa karamihan ng mga kaso, ang huli ay matatagpuan sa loob ng dating, at may maliit na agwat sa pagitan nila. Mayroong tinatawag na mga yunit na may panlabas na rotor, na isang umiikot na singsing, sa loob kung saan mayroong isang nakapirming stator.
Ang mga de-koryenteng motor ay mga makina na nagko-convert enerhiyang elektrikal sa mekanikal na enerhiya. Ang enerhiya ay nasasayang sa init ng Joule, Foucault currents, hysteresis, sparks, atbp. bawat de-koryenteng motor ay binubuo ng isang nakapirming bahagi na tinatawag na stator at isang gumagalaw na bahagi na tinatawag na rotor o armature na umiikot sa loob ng stator. paglaktaw kuryente sa pamamagitan ng stator winding at rotor winding, dalawang magnetic field ang nabuo, na nakikipag-ugnayan sa isa't isa na may kaakit-akit at nakakasuklam na pwersa, upang ang rotor ay umiikot.
Ang mga asynchronous na de-koryenteng motor ay kabilang sa mga pinaka ginagamit na motor. Ang stator ay nasa anyo ng isang guwang na silindro, na binubuo ng mga espesyal na sheet na halos 0.5 mm ang kapal, na insulated ng pintura o pintura. Sa mga grooves na matatagpuan sa paligid ng periphery ng stator, ang isang three-turn insulation ng insulated copper o aluminum conductors ay ibinigay, kung saan dumadaloy ang isang three-phase alternating current. Ang rotor ay binubuo ng parehong mga plato at may hugis ng isang buong silindro. May mga grooves sa ibabaw nito at ang isang three-phase winding ay ipinasok, katulad ng stator winding, o ang mga hubad na tansong rod ay ipinasok sa mga grooves, na konektado sa magkabilang dulo na may mga tansong singsing.
Mga uri ng mga converter
Bakit napakahalaga na isaalang-alang ang mga pananaw upang maunawaan kung paano naiiba ang stator ng isang de-koryenteng motor sa gumagalaw na bahagi nito. Ang buong punto ay iyon mga tampok ng disenyo Ang mga de-koryenteng motor ay may maraming, ang parehong naaangkop sa mga generator (ito ay mga converter mekanikal na enerhiya sa electric, ang mga de-koryenteng motor ay may kabaligtaran na pag-andar).
Ang mga windings ng anchor ay gawa sa mataas na conductive metal rods, na ilang sandali ay naayos sa mga dulo ng anchor. Ang paikot-ikot ay kahawig ng isang hawla at tinutukoy bilang isang anchor o anchor. Ang umiikot na magnetic field ng stator ay nagdudulot ng mga makabuluhang alon sa anchor winding. Ayon sa batas ni Lenz, mayroon magnetic pwersa kumikilos sa mga konduktor ng anchor, at ang anchor ay umiikot sa direksyon ng pag-ikot magnetic field. Gayunpaman, ang rotor ay hindi maaaring iikot sa parehong dalas ng field. Sinasabi namin na siya ay may isang tiyak na miss.
Gayunpaman, sa pagtaas ng bilis ng rotor, ang pagkakaiba sa bilis ng rotor at ang umiikot na magnetic field ay unti-unting bababa, ngunit binabawasan din ang bilis ng pagtawid ng lubid ng mga inductive na linya, at sa gayon ay binabawasan ang sapilitan na kasalukuyang at ang mga epekto ng puwersa ng umiikot na magnetic. field, at ang bilis ng rotor mula sa isang tiyak na punto ng oras ay hindi na tataas. . Ang rotor ay hindi tumatakbo parallel sa umiikot na magnetic field.

Kaya, ang mga de-koryenteng motor ay nahahati sa AC at direktang kasalukuyang. Ang una, sa turn, ay nahahati sa kasabay, asynchronous at kolektor. Para sa dating, ang angular na bilis ng pag-ikot ng stator at rotor ay pantay. Sa pangalawa, ang dalawang tagapagpahiwatig na ito ay hindi pantay. Sa mga uri ng kolektor, mayroong isang tinatawag na frequency converter at ang bilang ng mga phase ng isang mekanikal na uri sa disenyo, na tinatawag na isang kolektor. Kaya ang pangalan ng unit. Siya ang direktang konektado sa mga windings ng rotor ng engine at stator nito.
Animation ng tatlong yugto induction motor. Ang aluminyo ay hindi isang ferromagnetic na materyal, kaya ang pag-ikot nito ay hindi maipaliwanag sa parehong paraan tulad ng pag-ikot ng magnet. Sa isang umiikot na magnetic field, ang iba't ibang mga boltahe ay na-induce sa iba't ibang bahagi ng aluminum cylinder. Ang mga cylinder ay nagsisimulang sumailalim sa tinatawag na eddy currents, na sa isang umiikot na magnetic field ay lumikha ng isang puwersa na umiikot sa silindro. Ito ay mas malaki, mas malaki ang bilis ng motor ay mas mabagal kaysa sa bilis ng umiikot na magnetic field.
Para sa kadahilanang ito, ito ay isang induction motor na ang motor ay walang kasabay na bilis. Ang bilis nito ay nag-iiba depende sa pagkarga. Sa pamamagitan ng pagpapalit ng dalawang-phase na mga wire sa mga terminal ng motor, ang direksyon ng pag-ikot ng rotating field ay nababaligtad at ang motor ay umiikot sa kabaligtaran na direksyon. Sa pamamagitan ng disenyo, ang mga induction motor ay maaaring mabago sa single-phase induction motor, na angkop para sa maliliit na appliances tulad ng mga washing machine.
Ang mga DC machine sa rotor ay may parehong kolektor. Ngunit sa kaso ng mga generator, ito ay gumaganap ng mga function ng isang converter, at sa kaso ng mga electric motors, ang mga function ng isang inverter.
Kung ang isang de-koryenteng yunit ay isang makina kung saan ang rotor lamang ang umiikot, kung gayon ang pangalan nito ay one-dimensional. Kung ang dalawang elemento ay umiikot sa magkasalungat na direksyon, kung gayon ang apparatus na ito ay tinatawag na two-dimensional o birotative.
Ang malaking praktikal na kahalagahan ng three-phase currents ay ginagawang posible na magdisenyo ng simple at makapangyarihang mga de-koryenteng motor na nagko-convert ng elektrikal na enerhiya sa mekanikal na enerhiya. Ang mga ito ay batay sa paggalaw ng mga conductor kung saan ang isang electric current ay dumadaan sa isang magnetic field, na hinihimok ng isang kasalukuyang sa stator winding.
Isaalang-alang ang sitwasyon sa Fig. Tatlong coils na ang mga palakol ay nasa isang anggulo sa isa't isa at ang mga windings ay konektado sa isang bituin. Ang mga coil na ito ay konektado sa tatlong-phase na boltahe mula sa isa pang pinagmulan. Ang kasalukuyang dumadaan sa mga coils ay lumilikha ng magnetic field sa pagitan nila. Kung maglalagay tayo ng magnet sa field na ito, magsisimula itong umikot sa parehong dalas ng alternating current. Ang magnet ay umiikot nang sabay-sabay sa magnetic field. Ang pag-ikot ng isang magnetic field ay isang magnetic field na ang magnetic induction vector ay pana-panahong nagbabago. Mayroong umiikot na magnetic field dito.
Mga asynchronous na motor
Upang maunawaan ang mga konsepto ng rotor ng motor at stator nito, kinakailangang isaalang-alang ang isa sa mga uri ng mga electrical converting machine. Dahil ang mga asynchronous na de-koryenteng motor ay kadalasang ginagamit sa mga kagamitan sa produksyon at mga kasangkapan sa sambahayan, kung gayon ito ay nagkakahalaga ng pagsasaalang-alang sa kanila.

Ang dulong punto ng magnetic induction vector ay gumagalaw sa isang bilog. Sa fig. Ipinapakita ng 186 ang timing ng coil current sa itaas at ibaba ng umiikot na magnetic field. Katulad nito, maaari mong mahanap ang direksyon ng mga linya ng induction sa iba pang mga punto ng oras. Three-phase electric motor ay may dalawang pangunahing bahagi.
Stator - ay may katulad na disenyo tulad ng generator stator. Rotor - isang silindro ng mga grooved steel sheet kung saan naka-install ang mga windings. Ang isang tinatawag na separator winding ay ginagamit, na nilikha, halimbawa, sa pamamagitan ng pagbuhos ng tinunaw na aluminyo sa mga grooves. Ang solidification nito ay lumilikha ng isang conductive cage ng malakas na aluminum rods, na konektado sa rotor head na may aluminum rings. Ang paikot-ikot na anchor ay may hindi gaanong pagtutol at ang isang motor na may ganitong uri ng rotor ay tinatawag na isang maikling manggas na motor.
Kaya ano ang isang asynchronous na motor? Ito ay karaniwang isang cast-iron case kung saan ang magnetic circuit ay pinindot. Ang mga espesyal na grooves ay ginawa sa loob nito, kung saan ang stator winding, na binuo mula sa tansong wire, ay umaangkop. Ang mga grooves ay inilipat nang may kaugnayan sa isa't isa ng 120º, kaya tatlo lamang ang mga ito. Bumubuo sila ng tatlong yugto.
Ang rotor, sa turn, ay isang silindro na binuo mula sa mga sheet ng bakal (naselyohang de-koryenteng bakal), at naka-mount sa isang bakal na baras, na, naman, ay naka-install sa mga bearings kapag assembling ang electric engine. Depende sa kung paano binuo ang phase windings ng unit, ang mga rotor ng motor ay maaaring phase o short-circuited.
Walang mga conductor para sa rotor. Ang rotor na ito ay parang hawla para kay Ježek sa isang hawla, isang misteryo na lumilitaw sa mga aklat ni Jaroslav Foglar. Dahil sa maliit na pagtutol ng anchor, ang umiikot na magnetic field ay nag-uudyok ng malalaking alon sa paikot-ikot. Nagreresulta ito sa isang malaking magnetic force na nagiging sanhi ng pag-ikot ng rotor. Gayunpaman, ang armature ay hindi umiikot sa dalas ng umiikot na magnetic field. Kung ito ang kaso, walang pagbabago sa magnetic flux ng winding na sapilitan ng kasalukuyang at samakatuwid ang sanhi ng pag-ikot ay mawawala.
Kinakailangan na lumipat ang armature na may kaugnayan sa umiikot na magnetic field, i.e. "Pakiramdam" ang isang hindi nakatigil na magnetic field. Kung ito ay umikot nang sabay-sabay, "naramdaman" nito ang nakatigil na field. Kung ang isang magnet ay ginagamit bilang isang rotor, ang kasabay na pag-ikot ay nangyayari upang lumikha ng isang kasabay na motor.
- Ang isang phase rotor ay isang silindro kung saan ang mga coil ay pinagsama-sama, inilipat na may kaugnayan sa bawat isa ng 120º. Kasabay nito, ang tatlong slip ring ay naka-install sa disenyo nito, na hindi nakikipag-ugnay sa alinman sa baras o sa bawat isa. Sa isang gilid, ang mga dulo ng tatlong windings ay nakakabit sa mga singsing, at sa kabilang banda, mga graphite brush, na nasa sliding contact na may kaugnayan sa mga singsing. Ang isang halimbawa ng naturang makina ay ang mga crane motor na may phase rotor.
- Ang rotor ng squirrel-cage ay binuo mula sa mga tungkod na tanso na magkasya sa mga uka. Kasabay nito, ang mga ito ay konektado sa pamamagitan ng isang espesyal na singsing na gawa sa tanso.
Sa kaibahan sa kasabay na pag-ikot ng magnet, ang tatlong-phase na anchor ng de-koryenteng motor ay palaging umiikot sa mas mababang dalas, ang tinatawag na asynchronously. Ang mga motor na ito ay tinatawag na three-phase asynchronous na motor. Ang katangian ng halaga ng asynchronous na motor, ay tinatawag na slip c at tinutukoy ng ratio kung saan ang bilis ng pag-ikot ng umiikot na mg. bilis ng field at rotor. Ang slip ay maaaring ipahayag bilang isang porsyento.
Kung ang armature ay hindi magtagumpay sa anumang pagtutol sa panahon ng pag-ikot, ibig sabihin, kapag ang aparato ay nasa standby mode, ang slip ay maliit at ang anchor winding ay dumadaan sa isang maliit na kasalukuyang. Kapag ang motor ay na-load, ang slip ay tumataas, ang paikot-ikot ay nag-uudyok ng mas maraming kasalukuyang, at ang pag-ikot ng rotor ay pinananatili na may higit na magnetic force.
Sa kaibahan sa kasabay na pag-ikot ng magnet, ang tatlong-phase na anchor ng de-koryenteng motor ay palaging umiikot sa mas mababang dalas, ang tinatawag na asynchronously. Ang mga motor na ito ay tinatawag na three-phase asynchronous na motor. Ang value na katangian ng isang asynchronous electric motor ay tinatawag na slip c at tinutukoy ng ratio kung saan ang bilis ng pag-ikot ng umiikot na mg. bilis ng field at rotor. Ang slip ay maaaring ipahayag bilang isang porsyento.
Ang asynchronous electric motor na may phase rotor ay ang may-ari ng malalaking sukat at timbang. Ngunit mayroon itong mahusay na mga katangian tungkol sa pagsisimula at pagsasaayos ng mga torque. Ang mga makina na may rotor ng squirrel-cage ay itinuturing na pinaka maaasahan ngayon. Ang mga ito ay simple sa disenyo, at samakatuwid ay mura. Ang kanilang tanging disbentaha ay ang malaking panimulang kasalukuyang, na ngayon ay nilalabanan sa pamamagitan ng pagkonekta sa stator windings mula sa isang bituin patungo sa isang delta. Iyon ay, ang pagsisimula ay ginawa kapag konektado ng isang bituin, pagkatapos ng isang hanay ng mga rebolusyon, isang paglipat sa isang delta ay ginawa.
Mga kaugnay na post: 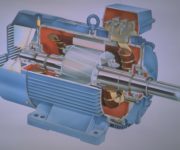
Paikot-ikot ng isang de-koryenteng produkto (aparato) - isang hanay ng mga pagliko o coil na nakaayos sa isang tiyak na paraan at konektado, na idinisenyo upang lumikha o gumamit ng isang magnetic field, o upang makakuha ng isang ibinigay na halaga ng paglaban ng isang produktong elektrikal (aparato).Winding coil ng isang electrical product (device) - isang winding ng isang electrical product (device) o bahagi nito, na ginawa bilang isang hiwalay na structural unit(GOST 18311-80).
Ang artikulo ay nagsasabi tungkol sa aparato ng stator at rotor windings mga de-koryenteng makina alternating current.
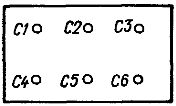
Ang isang stator na may labindalawang puwang, na ang bawat isa ay naglalaman ng isang konduktor, ay schematically na ipinapakita sa Fig. 1, a. Ang mga koneksyon sa pagitan ng mga konduktor na inilatag sa mga grooves ay ipinahiwatig para sa isa lamang sa tatlong yugto; ang simula ng mga phase A, B, C ng winding ay itinalagang C1, C2, C3; nagtatapos - C4, C5, C6. Ang mga bahagi ng paikot-ikot na inilatag sa mga grooves (ang aktibong bahagi ng paikot-ikot) ay karaniwang ipinapakita sa anyo ng mga rod, at ang mga koneksyon sa pagitan ng mga konduktor sa mga grooves (mga koneksyon sa dulo) ay ipinapakita bilang isang solidong linya.
Ang stator core ay may anyo ng isang guwang na silindro, na isang pakete o isang serye ng mga pakete (na pinaghihiwalay ng mga duct ng bentilasyon) mula sa mga sheet ng electrical steel. Para sa mga makina ng maliit at katamtamang kapangyarihan, ang bawat sheet ay naselyohang sa anyo ng isang singsing na may mga grooves kasama ang panloob na circumference. Sa fig. Ang 1b ay nagpapakita ng stator sheet na may mga grooves ng isa sa mga hugis na ginamit.
kanin. 1. Ang lokasyon ng paikot-ikot sa mga puwang ng stator at ang pamamahagi ng mga alon sa mga konduktor
Hayaang maging maximum ang agarang halaga ng kasalukuyang iA ng unang yugto sa isang punto ng oras at ang kasalukuyang ay nakadirekta mula sa simula ng yugto ng C1 hanggang sa pagtatapos nito C4. Isasaalang-alang namin ang kasalukuyang ito bilang positibo.
Ang pagtukoy sa mga instant na alon sa mga phase bilang mga projection ng umiikot na mga vector papunta sa nakapirming axis ON (Fig. 1, c), nakita namin na ang mga alon ng phase B at C ay negatibo sa isang naibigay na oras, ibig sabihin, sila ay nakadirekta mula sa mga dulo ng mga yugto hanggang sa simula.
Sundin natin ang Fig. 1, d pagbuo ng isang umiikot na magnetic field. Sa isinasaalang-alang na sandali ng oras, ang kasalukuyang ng phase A ay nakadirekta mula sa simula nito hanggang sa katapusan, i.e. kung sa mga konduktor 1 at 7 ito ay napupunta mula sa amin lampas sa eroplano ng pagguhit, pagkatapos ay sa mga konduktor 4 at 10 ito ay napupunta mula sa likod ng eroplano ng pagguhit sa amin (tingnan. Fig. 1, a at d).
Sa phase B, ang kasalukuyang sa puntong ito ng oras ay napupunta mula sa dulo ng phase hanggang sa simula nito. Sa pamamagitan ng pagkonekta sa mga konduktor ng ikalawang yugto ayon sa modelo ng una, maaari itong makuha na ang kasalukuyang ng phase B ay dumadaan sa mga konduktor 12, 9, 6, 3; sa parehong oras, sa pamamagitan ng conductors 12 at 6, ang kasalukuyang dumadaloy mula sa amin sa kabila ng eroplano ng pagguhit, at sa pamamagitan ng conductors 9 at 3 - sa amin. Ang larawan ng pamamahagi ng mga alon sa phase C ay makukuha ayon sa sample ng phase B.
Ang mga direksyon ng agos ay ibinibigay sa fig. 1,d; ang mga putol-putol na linya ay nagpapakita ng mga magnetic na linya ng patlang na nilikha ng mga alon ng stator; ang mga direksyon ng mga linya ay tinutukoy ng panuntunan ng kanang tornilyo. Makikita mula sa figure na ang mga conductor ay bumubuo ng apat na grupo na may parehong kasalukuyang direksyon at ang bilang ng mga pole 2p ng magnetic system ay apat. Ang mga lugar ng stator kung saan lumalabas ang mga magnetic lines dito ay ang mga north pole, at ang mga lugar kung saan pumapasok ang magnetic lines sa stator ay ang mga south pole. Ang arko ng bilog ng stator, na inookupahan ng isang poste, ay tinatawag na dibisyon ng poste.
Ang magnetic field sa iba't ibang mga punto ng circumference ng stator ay iba. Ang larawan ng pamamahagi ng magnetic field sa kahabaan ng circumference ng stator ay paulit-ulit na pana-panahon pagkatapos ng bawat double pole division 2τ; arc angle 2τ ay kinuha bilang 360 electrical degrees. Dahil may mga p double pole division sa kahabaan ng circumference ng stator, 360 geometric degrees ay katumbas ng 360p electrical degrees, at isang geometric degree ay katumbas ng p electrical degrees.
Sa fig. Ipinapakita ng 1d ang mga magnetic na linya para sa ilang nakapirming sandali ng oras. Kung isasaalang-alang natin ang larawan ng magnetic field para sa isang bilang ng mga sunud-sunod na sandali ng oras, makikita natin na ang field ay umiikot sa isang pare-pareho ang bilis.
Hanapin natin ang bilis ng pag-ikot ng field. Pagkatapos ng isang oras na katumbas ng kalahati ng panahon ng alternating current, ang mga direksyon ng lahat ng mga alon ay nagbabago sa kabaligtaran, kaya ang mga magnetic pole ay nagbabago ng mga lugar, ibig sabihin, sa kalahati ng panahon, ang magnetic field ay umiikot sa isang bahagi ng rebolusyon na katumbas ng 1 /2ρ. Sa isang panahon ng alternating current, ang field ay umiikot ng 1/ρ ng isang pagliko. Pagkatapos sa isang segundo ang field ay gumagawa ng 1/ρ revolutions, kung saan ang f ay ang dalas ng alternating current. Samakatuwid, ang bilis ng pag-ikot ng stator magnetic field, ibig sabihin, ang kasabay na bilis, ay (sa mga rebolusyon bawat minuto)
Ang bilang p ng mga pares ng pole ay maaari lamang maging integer, kaya sa dalas ng, halimbawa, 50 Hz, ang kasabay na bilis ay maaaring 3000; 1500; 1000 rpm, atbp.
kanin. 2. Detalyadong diagram ng isang three-phase single-layer winding
Ang isang katangiang dami na tumutukoy sa pagganap ng paikot-ikot ay ang bilang ng mga puwang sa bawat poste at yugto, ibig sabihin, ang bilang ng mga puwang na inookupahan ng paikot-ikot ng bawat yugto sa loob ng isang dibisyon ng poste:
kung saan ang z ay ang bilang ng mga puwang ng stator.
Ang paikot-ikot na ipinapakita sa fig. Ang 1a ay may sumusunod na data:
Kahit na para sa pinakasimpleng paikot-ikot na ito, ang spatial na pagguhit ng mga konduktor at ang kanilang mga koneksyon ay nagiging kumplikado, kaya karaniwan itong pinapalitan ng isang pinalawak na diagram, kung saan ang mga paikot-ikot na konduktor ay ipinapakita na hindi matatagpuan sa isang cylindrical na ibabaw, ngunit sa isang eroplano (a cylindrical na ibabaw na may mga grooves at isang paikot-ikot na "unfolds" sa isang eroplano). Sa fig. 2, at isang detalyadong diagram ng itinuturing na stator winding ay ibinigay.
Sa nakaraang figure, para sa pagiging simple, ipinakita na ang bahagi ng phase A ng paikot-ikot, na inilatag sa mga grooves 1 at 4, ay binubuo lamang ng dalawang konduktor, iyon ay, ng isang pagliko. Sa katotohanan, ang bawat bahagi ng paikot-ikot sa bawat poste ay binubuo ng w turn, ibig sabihin, ang bawat pares ng mga slot ay naglalaman ng w conductor na pinagsama sa isang coil. Samakatuwid, kapag nag-bypass sa isang pinalawak na scheme, halimbawa, phase A mula sa slot 1, kailangan mong i-bypass ang mga slot 1 at 4 w beses bago lumipat sa slot 7. Ang distansya sa pagitan ng mga gilid ng pagliko ng isang coil, o ang winding pitch, ang y ay ipinapakita sa fig. 1, d; ito ay karaniwang ipinahayag sa bilang ng mga puwang.
kanin. 3. Kalasag asynchronous na makina
Ipinapakita sa fig. 1 at 2, ang stator winding ay tinatawag na single-layer, dahil umaangkop ito sa bawat uka sa isang layer. Upang mailagay ang mga frontal na bahagi na intersecting sa eroplano, sila ay nakatungo sa iba't ibang mga ibabaw (Larawan 2, b). Ang single-layer windings ay ginawa gamit ang isang hakbang na katumbas ng poste division y = τ: (Larawan 2, a), o ang hakbang na ito ay katumbas ng average na dibisyon ng poste para sa iba't ibang coils ng parehong yugto, kung y > 1 , y . Sa kasalukuyan, ang double-layer windings ay mas karaniwan.
Ang simula at dulo ng bawat isa sa tatlong yugto ng paikot-ikot ay ipinapakita sa kalasag ng makina, kung saan mayroong anim na clamp (Larawan 3). Tatlong linear wire mula sa tatlong-phase na network. Ang mga mas mababang clamp na C4, C5, C6 (mga dulo ng phase) ay maaaring konektado sa isang punto ng dalawang pahalang na jumper, o ang bawat isa sa mga clamp na ito ay konektado sa pamamagitan ng isang vertical jumper sa itaas na clamp na nakahiga sa itaas nito.
Sa unang kaso, ang tatlong yugto ng stator ay bumubuo ng isang koneksyon sa bituin, sa pangalawang kaso, isang koneksyon sa delta. Kung, halimbawa, ang isang stator phase ay idinisenyo para sa isang boltahe ng 220 V, kung gayon boltahe ng linya ang network kung saan nakakonekta ang motor ay dapat na 220 V kung ang stator ay nakabukas sa pamamagitan ng isang tatsulok; kapag ito ay naka-on sa pamamagitan ng isang bituin, ang boltahe ng linya ng network ay dapat na
![]()
Kapag ikinonekta ang stator sa isang bituin, ang neutral na wire ay hindi ibinibigay, dahil ang motor ay isang simetriko na pagkarga para sa network.
Ang rotor ng isang asynchronous machine ay binuo mula sa naselyohang mga sheet ng insulated electrical steel sa isang baras o sa isang espesyal na sumusuportang istraktura. Ang radial gap sa pagitan ng stator at rotor ay ginawang maliit hangga't maaari upang matiyak ang mababang magnetic resistance sa landas ng magnetic flux na tumatagos sa magkabilang bahagi ng makina.
Ang pinakamaliit na puwang na pinapayagan ng mga teknolohikal na kinakailangan ay mula sa ikasampu ng isang milimetro hanggang ilang milimetro, depende sa kapangyarihan at mga sukat ng makina. Ang mga conductor ng rotor winding ay inilalagay sa mga grooves kasama ang mga generatrice ng rotor nang direkta sa ibabaw nito upang matiyak ang pinakamalaking koneksyon sa pagitan ng rotor winding at ang umiikot na field.
Ang mga asynchronous na makina ay ginawa parehong may phase at may rotor ng squirrel-cage.

kanin. 4. Phase rotor
Ang phase rotor ay, bilang panuntunan, three-phase winding, gumanap, tulad ng isang stator, na may parehong bilang ng mga pole. Ang paikot-ikot ay konektado sa pamamagitan ng isang bituin o isang tatsulok; ang tatlong dulo ng winding ay dinadala sa tatlong insulated slip ring na umiikot sa machine shaft. Sa pamamagitan ng mga brush na naka-mount sa nakatigil na bahagi ng makina at dumudulas sa mga slip ring, ang isang three-phase na pagsisimula o pagsasaayos ng rheostat ay kasama sa rotor, ibig sabihin, ang aktibong pagtutol ay ipinakilala sa bawat yugto ng rotor. Hitsura phase rotor ay ipinapakita sa fig. 4, tatlong slip ring ang makikita sa kaliwang dulo ng baras. Ang mga asynchronous na motor na may isang phase rotor ay ginagamit kung saan kinakailangan ang makinis na kontrol ng bilis ng hinimok na mekanismo, pati na rin sa madalas na pagsisimula ng motor sa ilalim ng pagkarga.
Ang disenyo ng isang squirrel-cage rotor ay mas simple kaysa sa isang phase rotor. Para sa isa sa mga istruktura sa Fig. 5, a ay nagpapakita ng hugis ng mga sheet mula sa kung saan ang rotor core ay binuo. Sa kasong ito, ang mga butas na malapit sa panlabas na circumference ng bawat sheet ay bumubuo ng mga longitudinal grooves sa core. Ang aluminyo ay ibinubuhos sa mga grooves na ito, pagkatapos na tumigas, ang mga longitudinal conductive rod ay nabuo sa rotor. Sa magkabilang dulo ng rotor, ang mga aluminyo na singsing ay inihagis nang sabay-sabay, na nag-short-circuiting sa mga aluminum rod. Ang resultang conductive system ay karaniwang tinatawag na squirrel cage.
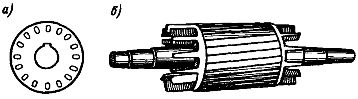
kanin. 5. Rotor ng squirrel-cage
Ang squirrel-cage squirrel-cage rotor ay ipinapakita sa fig. 5 B. Sa mga dulo ng rotor, ang mga blades ng bentilasyon ay nakikita, na pinagsama sa mga singsing na short-circuit. Sa kasong ito, ang mga puwang ay beveled sa pamamagitan ng isang slot division kasama ang rotor. Ang squirrel cage ay simple, walang sliding contact, kaya ang three-phase asynchronous na motors na may squirrel-cage rotor ay ang cheapest, simple at pinaka-maaasahan; sila ang pinakakaraniwan.
Pinapayuhan ka naming basahin
 Mga sikolohikal na katangian ng mga bata sa pagdadalaga
Mga sikolohikal na katangian ng mga bata sa pagdadalaga Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan
Paglipat ng bata sa ibang paaralan - ang pamamaraan at mga kinakailangang dokumento Kung ililipat ang isang bata sa ibang paaralan, diagnosis, paggamot Paggamot ng urogenital chlamydia") Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia
Chlamydia urogenital - paglalarawan, sanhi, sintomas (signs), diagnosis, paggamot Paggamot ng urogenital chlamydia Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano
Ang mga benepisyo at kahalagahan ng hydroamino acid threonine para sa katawan ng tao L threonine ano

