Прост алгоритъм на дискретния PID контролер
Поддържа се от всички AVR микроконтролери
PID функцията използва 534 байта флаш памет и 877 процесорни цикъла (IAR - оптимизация на малък размер)
1. Въведение
Това ръководство описва проста реализация на дискретно пропорционално-интегрално-производен (PID) контролер.
При работа с приложения, където изходният сигнал на системата трябва да се променя в съответствие с референтната стойност, е необходим алгоритъм за управление. Примери за такива приложения са блок за управление на двигател, контролен блок за температура, налягане, поток на течност, скорост, сила или други променливи. PID контролерът може да се използва за управление на всяка измерена променлива.
Много решения се използват в областта на управлението от дълго време, но PID контролерите могат да се превърнат в "индустриален стандарт" поради своята простота и добра производителност.
За получаване Допълнителна информацияза PID контролери и техните приложения, читателят трябва да направи справка с други източници, като например PID контролери от K. J. Astrom & T. Hagglund (1995)
Фигура 1-1.Типични реакции на PID регулатор към стъпкова промяна в еталонния сигнал
2. ПИД контролер
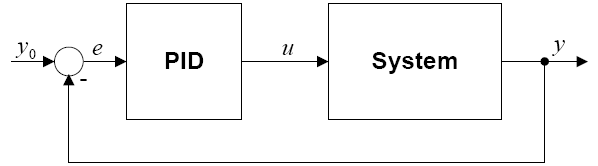
Фигура 2-1 показва диаграма на система с PID контролер. PID контролерът сравнява измерената стойност на процеса Y с дадена референтна стойност Y0. След това разликата или грешката E се обработва, за да се изчисли нов процес на въвеждане U. Този нов процес на въвеждане ще се опита да доближи стойността на измерения процес до определената стойност.
Алтернатива на системата за управление със затворен контур е системата за управление с отворен цикъл. Отвореният контролен контур (без обратна връзка) в много случаи не е задоволителен и приложението му често е невъзможно поради свойствата на системата.
Фигура 2-1. PID система за управление със затворен контур
За разлика от простите алгоритми за управление, PID контролерът може да управлява процес въз основа на неговата история и скорост на промяна. Това дава по-точен и стабилен метод на управление.
Основната идея е, че контролерът получава информация за състоянието на системата с помощта на сензор. След това изважда измерената стойност от референтната стойност, за да изчисли грешката. Грешката ще бъде обработена по три начина: обработка на настоящето време чрез пропорционалния член, връщане в миналото с помощта на интегралния член и предвиждане на бъдещето с помощта на диференциалния член.
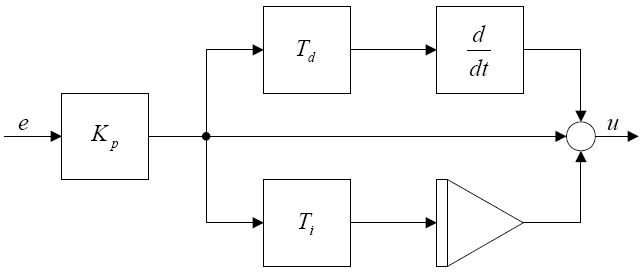
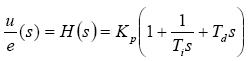
Фигура 2-2 показва електрическата схема на PID контролер, където Tp, Ti и Td са съответно пропорционалните, интегралните и производните времеконстанти.
Фигура 2-2.Диаграма на PID контролера
2.1 Пропорционално
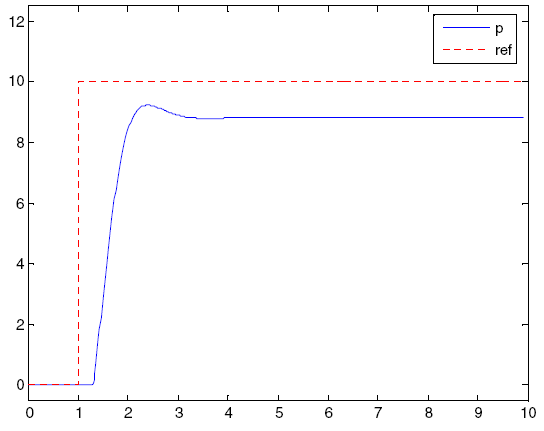
Пропорционалният член (P) дава управляващ сигнал, пропорционален на изчислената грешка. Използването само на едно пропорционално управление винаги дава стационарна грешка, освен когато управляващият сигнал е нула и стойността на системния процес е равна на изискваната стойност. На фиг. 2-3 се появява стационарна грешка в стойността на системния процес след промяна в опорния сигнал (ref). Използването на твърде голям P-член ще доведе до нестабилна система.Фигура 2-3. P реакция на контролера на стъпкова промяна в еталонния сигнал
2.2 Интегрален термин
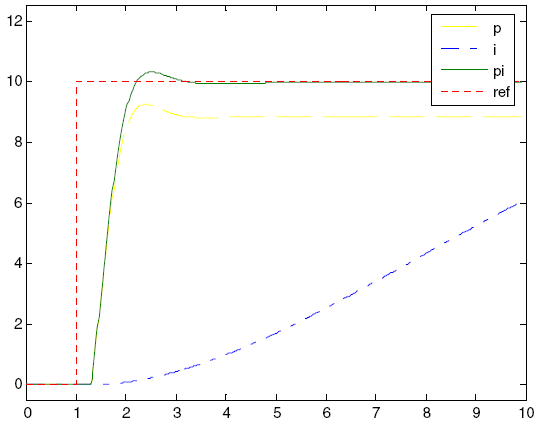
Интегралният компонент (I) представлява предишните грешки. Сумирането на грешката ще продължи, докато стойността на системния процес стане равна на желаната стойност. Обикновено интегралният компонент се използва заедно с пропорционалния компонент в така наречените PI регулатори. Използването само на интегралния компонент дава бавен отговор и често осцилираща система. Фигура 2-4 показва стъпковия отговор на I и PI контролерите. Както можете да видите, отговорът на PI контролера няма стационарна грешка, а отговорът на I контролера е много бавен.
Фигура 2-4.Реакцията на I- и PI регулатора на стъпкова промяна в контролираната стойност
2.3 Производен термин
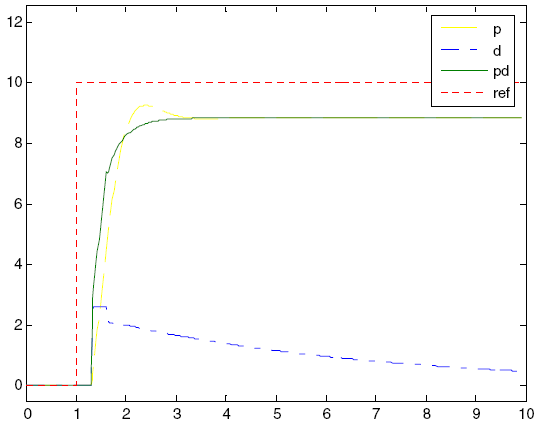
Диференциалният член (D) е скоростта на промяна на грешката. Добавянето на този компонент подобрява реакцията на системата при внезапна промяна в нейното състояние. Диференциалният термин D обикновено се използва с P или PI алгоритми, като PD или PID контролери. Голям диференциален компонент D обикновено дава нестабилна система. Фигура 2-5 показва реакциите на D и PD контролера. Реакцията на PD контролера дава по-бързо увеличение на стойността на процеса от P контролера. Имайте предвид, че диференциалният член D се държи по същество като високочестотен филтър за сигнала за грешка и по този начин лесно прави системата нестабилна и по-податлива на шум.
Фигура 2-5.Реакция на D- и PD-регулатора на стъпкова промяна в еталонния сигнал
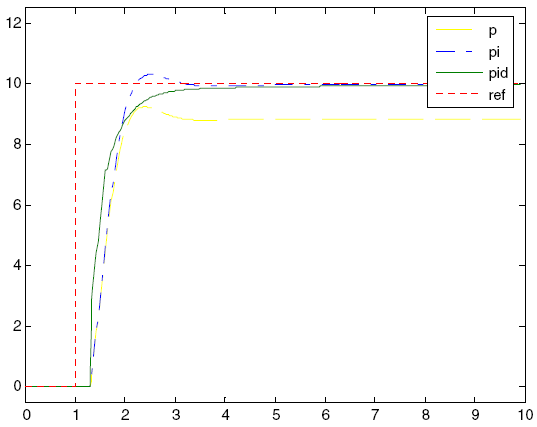
PID контролерът дава най-добра производителност, защото използва всички компоненти заедно. Фигура 2-6 сравнява P, PI и PID контролерите. PI подобрява P чрез премахване на стационарната грешка, а PID подобрява PI с по-бърз отговор.
Фигура 2-6.Реакция на P-, PI- и PID контролера на стъпкова промяна в еталонния сигнал
2.4. Настройки
Най-добрият начин да намерите необходимите параметри на PID алгоритъма е да използвате математически модел на системата. Често обаче няма подробно математическо описание на системата и настройките на параметрите на PID регулатора могат да бъдат направени само експериментално. Намирането на параметри за PID контролер може да бъде трудна задача. Тук голямо значениеразполагат с данни за свойствата на системата и различни условиянейната работа. Някои процеси не трябва да позволяват на променливата на процеса да превишава зададената точка. Други процеси трябва да сведат до минимум потреблението на енергия. Също така най-важното изискване е стабилността. Процесът не трябва да се колебае при никакви обстоятелства. Освен това стабилизирането трябва да настъпи в рамките на определено време.
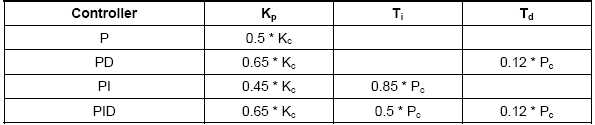
Има някои методи за настройка на PID контролера. Изборът на метод ще зависи до голяма степен от това дали процесът може да бъде офлайн за настройка или не. Методът на Ziegler-Nichols е добре известен неофлайн метод за настройка. Първата стъпка в този метод е да настроите усилването на I и D на нула, като увеличите усилването на P до постоянна и стабилна осцилация (колкото е възможно по-близо). След това критичното усилване Kc и периодът на трептене Pc се записват и стойностите на P, I и D се коригират с помощта на таблица 2-1.
Таблица 2-1.Изчисляване на параметрите по метода на Циглер-Николс
Често е необходима допълнителна настройка на параметрите, за да се оптимизира работата на PID контролера. Читателят трябва да отбележи, че има системи, при които PID контролерът няма да работи. Това може да са нелинейни системи, но като цяло често възникват проблеми с PID управлението, когато системите са нестабилни и ефектът на входния сигнал зависи от състоянието на системата.
2.5. Дискретен PID контролер
Дискретният PID контролер ще прочете грешката, ще изчисли и ще изведе управляващия сигнал за времето за вземане на проби T. Времето за вземане на проби трябва да бъде по-малко от най-малката времева константа в системата.
2.5.1. Описание на алгоритъма
За разлика от простите алгоритми за управление, PID контролерът може да манипулира управляващия сигнал въз основа на историята и скоростта на промяна на измерения сигнал. Това дава по-точен и стабилен метод на управление.
Фигура 2-2 показва схемата на схемата на PID контролера, където Tp, Ti и Td са съответно пропорционалните, интегралните и производните времеконстанти.
Трансферната функция на системата, показана на фигура 2-2, е:
Ние приближаваме интегралните и диференциалните компоненти, за да получим дискретна форма
За да се избегне тази промяна в референтната стойност на процеса, която прави нежелана бърза промяна на контролния вход, контролерът се подобрява само на базата на извлечения член на стойностите на процеса:
3. Внедряване на PID контролер в C
Към този документ е приложено работещо приложение на C. Пълно описание на изходния код и информация за компилация могат да бъдат намерени във файла "readme.html".
Фигура 3-1.Блок-схема на демонстрационно приложение
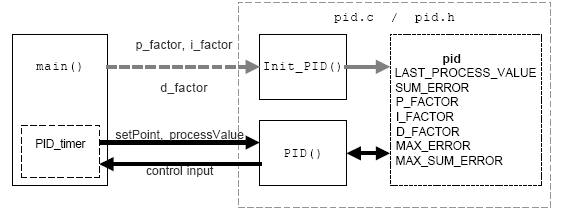
Фигура 3-1 показва опростена диаграма на демонстрационното приложение.
PID контролерът използва структура за съхраняване на своя статус и параметри. Тази структура се инициализира от основната функция и само указател към нея се предава на функциите Init_PID() и PID().
Функцията PID() трябва да се извиква за всеки времеви интервал T, това се задава от таймер, който задава флага PID_timer, когато времето за проба е изтекло. Когато флагът PID_timer е зададен, главната програма чете референтната стойност на процеса и системната стойност на процеса, извиква функцията PID() и извежда резултата към контролния вход.
За да се увеличи точността, p_factor, i_factor и d_factor се увеличават 128 пъти. Резултатът от PID алгоритъма по-късно се намалява чрез разделяне на 128. Стойността на 128 се използва за осигуряване на оптимизация на компилация.
![]()
В допълнение, влиянието на Ifactor и Dfactor ще зависи от времето T.
3.1. Интегрално навиване
Когато входният процес, U, достигне достатъчно висока стойност, той става ограничен. Или от вътрешния цифров диапазон на PID контролера, или от изходния диапазон на контролера, или потиснат в усилвателите. Това ще се случи, ако има достатъчно голяма разлика между измерената и референтната стойност, обикновено защото процесът има повече смущения, отколкото системата може да понесе.
Ако администраторът използва интегрален термин, тази ситуация може да бъде проблематична. В такава ситуация интегралният член постоянно ще се сумира, но при липса на големи нарушения PID контролерът ще започне да компенсира процеса, докато интегралната сума се върне към нормалното.
Този проблем може да бъде решен по няколко начина. В този пример максималната интегрална сума е ограничена и не може да бъде по-голяма от MAX_I_TERM. Правилен размер MAX_I_TERM ще зависи от системата.
4. Допълнително развитие
Представеният тук PID контролер е опростен пример. Контролерът трябва да работи добре, но някои приложения може да изискват контролерът да бъде още по-надежден. Може да е необходимо да се добави корекция на насищане в интегралния член, базиран само на пропорционалния член на стойността на процеса.
При изчисляването на Ifactor и Dfactor времето за вземане на проби T е част от уравнението. Ако използваното време за вземане на проби T е много по-малко или по-голямо от 1 секунда, точността на Ifactor или Dfactor ще бъде недостатъчна. Възможно е да се пренапише PID и алгоритъмът за мащабиране, така че да се запази точността на интегралните и диференциалните членове.
5. Справочна литература
K. J. Astrom & T. Hagglund, 1995: PID контролери: теория, дизайн и настройка.
Международно общество за измерване и кон.
6. Файлове
AVR221.rarПревод на Кирил Владимиров по желание
Лекция 30Внедряване на PID регулатор и цифрово филтриране в контролери
Микропроцесорните контролери дават възможност за реализиране както на дискретни и аналогови контролери, така и на нелинейни и самонастройващи се контролери. Основният проблем на цифровото управление е да се намери подходящата структура на контролера и неговите параметри. Софтуерното внедряване на контролни алгоритми за тези параметри обикновено е сравнително проста задача.
Всеки регулатор трябва да включва и средства за защита, които предотвратяват опасното развитие на процеса под действието на регулатора в аварийни ситуации.
Много ТП се характеризират с няколко входни и изходни параметъра. Често вътрешните връзки и взаимодействието на съответните сигнали не са критични и процесът може да се контролира с набор от прости контролери, като всеки контур се използва в системи за директно цифрово управление.
Линейните регулатори с един вход/изход могат да бъдат представени в обобщен вид
където uе изходът на контролера (контролна променлива), u се зададената стойност и при– изходен сигнал на процеса (контролирана променлива). Параметър Ппредставлява заповедта на регулатора.
Един обикновен PID регулатор може да се разглежда като специален случай на обобщен дискретен регулатор с П= 2.
Помислете за регулатор, състоящ се от две части: обратна връзка (обратна връзка) Ж Facebook (с), който обработва грешката д , и цикъл на подаване напред Ж FF (с), който контролира промените в действието на настройката и добавя коригиращ член към управляващия сигнал, така че системата да реагира по-бързо на промените в настройката. За този контролер, контролното действие U (с ) е сумата от два сигнала
Този израз може да бъде пренаписан като
където U Е 1 (с) е изпреварващ сигнал, базиран на референтната стойност (настройващо действие), a U Е 2 (с) е сигнал за обратна връзка.
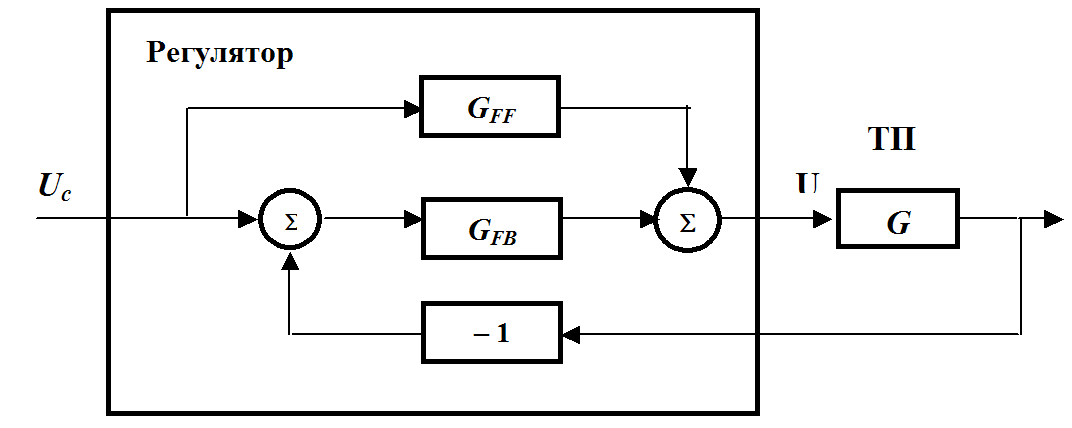
Фиг.30.1.Контролер, съдържащ управляваща верига за подаване, базирана на референтна стойност (зададена точка) и верига за обратна връзка, базирана на изхода на процесаа
Контролерът има два входни сигнала U ° С (с) и Y(с) и следователно може да се опише с две трансферни функции Ж Е 1 (с) и Ж Р (с).
|
|
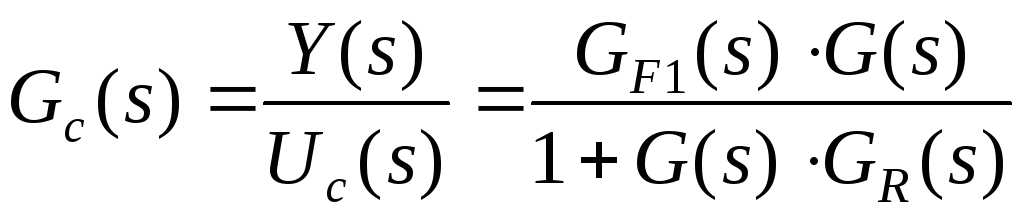
Тъй като контролерът с PF (30.3) се дължи на Ж Е 1 (с) повече регулируеми коефициенти от конвенционален регулатор, тогава затворената система за управление има по-добри характеристики.
Позицията на полюсите на системата за обратна връзка може да се променя с помощта на регулатора Ж Р (с), и контролера за предварителна връзка Ж Е 1 (с) добавя нови нули към системата. Следователно системата за управление може бързо да реагира на промени в сигнала на задачата, ако Ж Е 1 (с) е избран правилно.
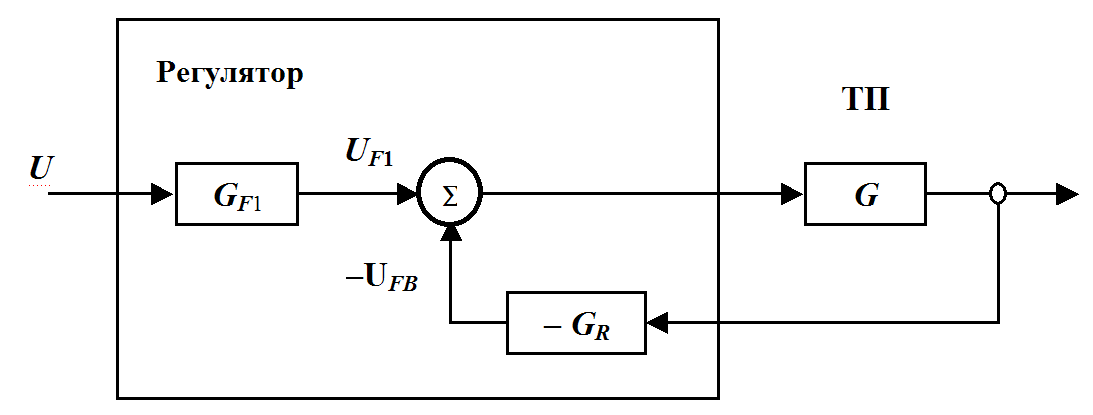
Фиг.30.2. Структура на линеен регулатор с директно управление и обратна връзка
Благодарение на използването на такъв контролер е възможно да се създават високоточни (серво) системи за управление чрез електрически задвижвания, роботи или металорежещи машини. За тях е важно реакцията на изхода от процеса да е бърза и точна за всяка промяна в справката.
Ако числителят и знаменателят на PF Ж Р (с), и Ж Е 1 (с) в (23.3) да бъдат изразени чрез полиноми в с , тогава описанието на контролера след трансформации може да бъде представено в следната форма
Ж 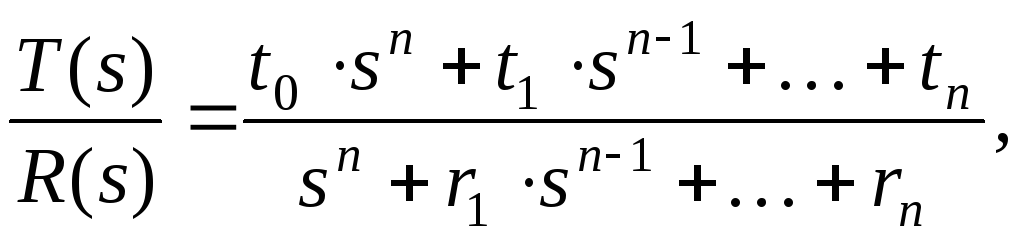
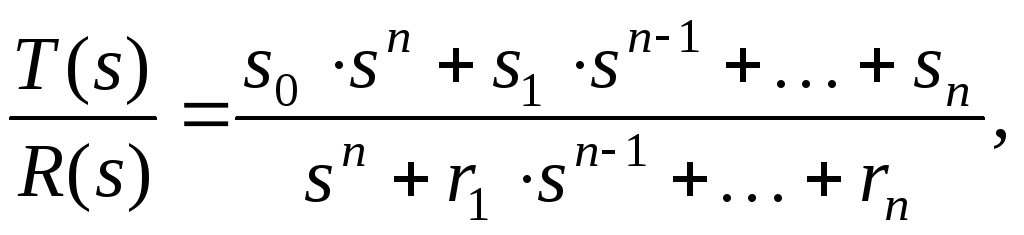 де
де
r аз ,с аз ,T аз – параметри на PF полиноми, с– Оператор на Лаплас.
Регулаторът, съответстващ на уравнение (30.4), може да бъде представен като обобщен контролер (общ контролер)
PF на процеса може да се изрази като
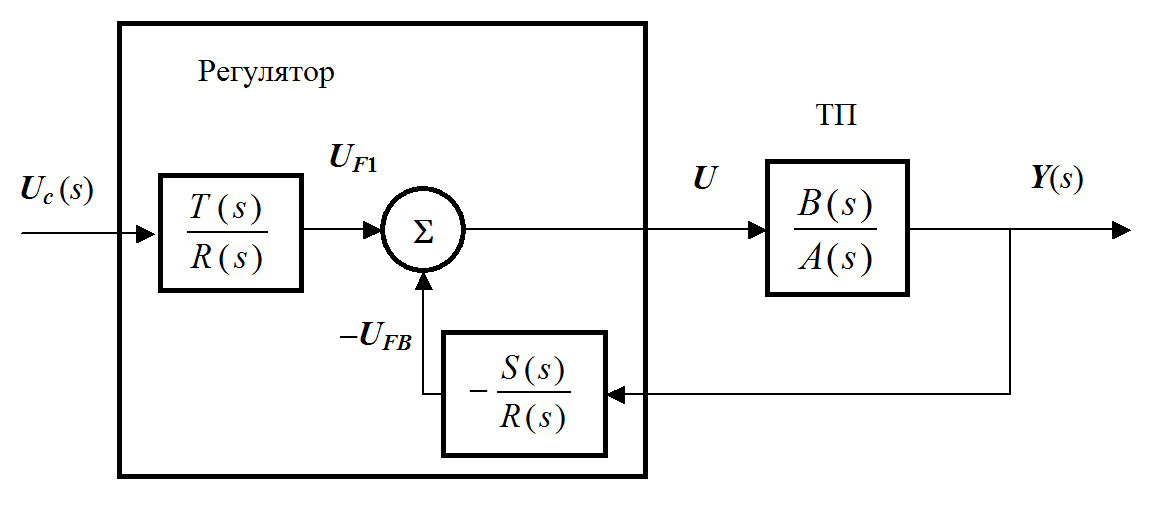
Фиг.30.3. Структурата на линеен контролер с директно управление и обратна връзка под формата на PF
Ако Р(с),С(с) и T(с) имат достатъчно висок ред, т.е. достатъчен брой "копчета за настройка", PF на затворена система може да варира в широк диапазон. Ред на регулатора Птрябва да е същият като оригиналния процес. Да, бране Р(с) и С(с), може произволно да се промени знаменателят на PF на затворена система. Теоретично това означава, че полюсите на една затворена система могат да бъдат изместени на всяко място в комплексната равнина. (На практика максималната амплитуда и скорост на промяна на управляващия сигнал ограничава свободата на движение на полюсите.)
В резултат на това нестабилна система с полюс с положителна реална част може да бъде стабилизирана с помощта на SU.
30.1. Реализация на PID контролер
На първо място, трябва да се разработи модел на дискретен контролер и да се определи подходяща честота на дискретизация. Амплитудата на изходната стойност на регулатора трябва да бъде между минималната и максималната допустима стойност. Често е необходимо да се ограничи не само изходният сигнал, но и скоростта на изменение поради физическите възможности на МИ и да се предотврати прекомерното им износване.
Промяната на настройките на параметрите и превключването от автоматична към ръчна работа или други промени в работните условия не трябва да водят до смущения в контролирания процес.
Регулаторите могат да бъдат създадени в аналогова технология на базата на операционни усилватели или като цифрови устройства на базата на микропроцесори. Те обаче имат почти еднакъв външен вид - малък здрав корпус, който позволява монтаж в индустриална среда.
Въпреки че цифровите технологии имат много предимства, аналоговият подход е основата на цифровите решения. Предимствата на цифровите контролери включват възможността да ги свързват помежду си чрез комуникационни канали, което позволява обмен на данни и дистанционно управление. Интересуваме се от програми за цифров PID контролер
Дискретен модел PID регулатор . Необходим е за софтуерната реализация на аналоговия контролер. Ако контролерът е проектиран на базата на аналогово описание и след това е изграден неговият дискретен модел, при достатъчно малки интервали на вземане на проби, производните по време се заменят с крайни разлики, а интегрирането се заменя със сумиране. Изходната грешка на процеса се изчислява за всяка проба
д(к)=u ° С (к) – г(к) .
В този случай интервалът на вземане на проби t ссе счита за константа и всички промени на сигнала, които може да са възникнали по време на интервала на вземане на проби, не се вземат предвид.
Има два вида алгоритъм на PID регулатора - позиционен и инкрементален
Алгоритъм на позиционния PID регулатор. В позиционния алгоритъм ( позиция форма) изходният сигнал е абсолютната стойност на управляващата променлива MI. Дискретният PID регулатор има формата
u(к)=u 0 +u П (к)+u аз (к)+u д (к).
В този случай интервалът на вземане на проби ts се счита за постоянен и всички промени в сигнала, които биха могли да възникнат по време на интервала на вземане на проби, не се вземат предвид.
Дори при нулева контролна грешка, изходният сигнал е различен от нула и се определя от отместването u 0 .
Пропорционалната част на регулатора има формата
u П (к)= К∙ д(к).
Интегралната част се апроксимира с крайни разлики
u аз (к) = u аз (к – 1) + К∙ (T с / T аз) ∙ д(к)= u аз (к – 1) + К∙ а∙ д(к).
Стойността на втория член е малка T с и голям T азможе да стане много малък, така че трябва да осигурите необходимата точност на машинното му представяне.
Диференциалната част на PID регулатора се апроксимира от разликата назад
u д (к) =b∙ u д (к – 1) – К∙ (T д / T с) ∙ (1– b)∙ [г(к)– г(к – 1)],
|
|
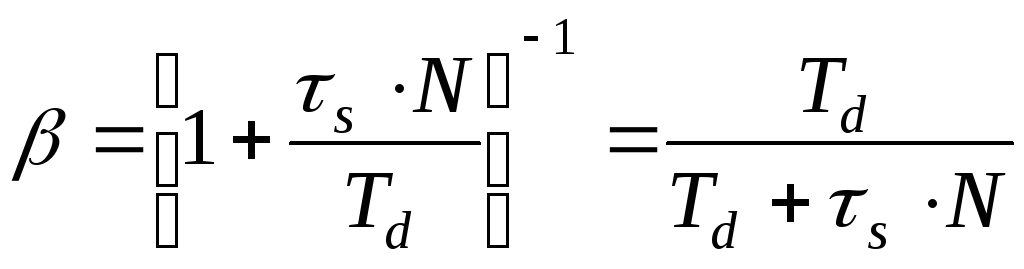
Стойност T д / н = T fе нормализирана нпъти) времеконстантата на филтъра при апроксимацията на диференциалния компонент на закона за управление чрез апериодична връзка от първи ред. Номер нвзети в диапазона от 5 до 10. Стойността bе в диапазона от 0 до 1.
алгоритъм за увеличаване. Той изчислява само промяната в своя изходен сигнал. Алгоритъм за увеличаване ( инкрементален форма) PID контролерът е удобен за използване, ако IM е вид интегратор, като например стъпков двигател. Друг пример за такъв MI е клапан, чието отваряне и затваряне се контролира от импулси и който поддържа позицията си при липса на входни сигнали.
В алгоритъма за нарастване се променят само управляващият изходен сигнал от момента на време ( к – 1) до момента к. Алгоритъмът на контролера е написан като
Δ u аз (к) = u (к) – u (к – 1) =Δ u П (к) + Δ u аз (к) + Δ u д (к).
Пропорционалната част на алгоритъма за нарастване се изчислява от уравнението
Δ u П (к) = u П (к) – u П (к – 1) =К∙ [д(к)– д(к – 1)] = К∙ Δ д(к).
Неразделна част – от уравнението
Δ u аз (к) = u аз (к) – u аз (к – 1) =К∙ а∙ д(к).
Диференциалната част е от уравнението
Δ u д (к) =b Δ u д (к – 1) – К∙ (T д / T с)∙(1– b)∙ [Δ г(к)– Δ г(к – 1),
Δ г(к) =г(к)– г(к – 1).
Алгоритъмът е много прост. За неговото приложение като правило са достатъчни операции с плаваща запетая с обикновена точност. Няма проблеми поради насищане. При превключване от ръчен режим към автоматичен регулатор, който изчислява стъпките, не се изисква присвояване на начална стойност на управляващия сигнал ( u 0 в позиционния алгоритъм).
IM може да бъде поставен в желаната позиция по време на стартиране както с ръчно, така и с автоматично управление. Малък недостатък на алгоритъма за нарастване е необходимостта да се вземе предвид интегралната компонента.
Референтната стойност се намалява както в пропорционалната, така и в диференциалната част, като се започне от втората проба, след като е била променена. Следователно, ако се използва контролер, базиран на инкрементален алгоритъм без интегрален компонент, контролираният процес може да се отклони от референтната стойност.
Определяне на честотата на дискретизация в SN . Това е повече изкуство, отколкото наука. Твърде ниската честота на дискретизация намалява ефективността на управлението, особено способността на системата за управление да компенсира смущенията. Но ако интервалът на вземане на проби надвиши времето за реакция на процеса, смущението може да повлияе на процеса и да изчезне, преди контролерът да предприеме коригиращо действие. Следователно, когато се определя честотата на дискретизация, е важно да се вземе предвид както динамиката на процеса, така и характеристиките на смущението.
От друга страна, твърде високата честота на дискретизация води до повишено натоварване на компютъра и износване на IM.
По този начин определянето на честотата на дискретизация е компромис между изискванията на динамиката на процеса и наличната производителност на компютрите и технологичните механизми. Стандартните цифрови контролери, работещи с малък брой контролни вериги (8 до 16), използват фиксирана честота на дискретизация от порядъка на части от секундата.
Съотношението сигнал/шум също влияе върху честотата на дискретизация. При ниски стойности на това съотношение, т.е. при висок шум, трябва да се избягва висока честота на дискретизация, тъй като отклоненията в измервателния сигнал е по-вероятно да бъдат свързани с високочестотен шум, а не с реални промени във физическия процес.
Счита се, че адекватната честота на дискретизация е свързана с честотната лента или времето за установяване на системата за управление със затворен контур. Основните правила препоръчват честотата на вземане на проби да бъде 6-10 пъти по-висока от честотната лента или времето за установяване да бъде поне пет интервала на вземане на проби.
В случай, че е приемливо допълнително фазово забавяне от 5-15°, е валидно следното правило
T с · ω с = 0,15 – 0,5 ,
където ω с – честотна лента на системата (на ниво 3 dB), T с – период на квантуване или интервал на вземане на проби. (Този подход се използва в много промишлени цифрови единични и многоконтурни PID контролери.)
Ограничение на управляващия сигнал . Има две предпоставки за ограничаване на управляващия сигнал:
1) амплитудата на изходния сигнал не може да надвишава обхвата на DAC на изхода на компютъра;
2) обхватът на работа на MI също винаги е ограничен. Вентилът не се отваря повече от 100%; двигателят не може да се захранва с неограничен ток и напрежение.
Следователно алгоритъмът за управление трябва да включва някаква функция, която ограничава изходния сигнал. В някои случаи трябва да се дефинира мъртва зона или мъртва зона.
Ако се използва контролер с инкрементален алгоритъм, тогава промените в управляващия сигнал може да са толкова малки, че MI да не може да ги обработи. Ако управляващият сигнал е достатъчен, за да повлияе на MI, препоръчително е да се избягват малки, но чести операции, които могат да ускорят износването му.
Едно просто решение е да се сумират малки промени в контролната променлива и да се издаде управляващ сигнал MI само след надвишаване на някаква прагова стойност. Въвеждането на мъртва зона има смисъл само ако надвишава резолюцията на ЦАП-а на изхода на компютъра
Предотвратяване на интегрално насищане. Интегрално спиране възниква, когато PI или PID контролерът трябва да компенсира грешка, която е извън диапазона на контролираната променлива за дълго време. Тъй като мощността на регулатора е ограничена, грешката е трудна за неутрализиране.
Ако контролната грешка остане знак за дълго време, стойността на интегралния компонент на PID регулатора става много голяма. Това се случва, ако управляващият сигнал е толкова ограничен, че изчисленият изход на регулатора се различава от реалния изход на MI.
Тъй като интегралната част става нула известно време след като стойността на грешката е променила знака, интегралната наситеност може да доведе до големи превишавания. Интегралното насищане е резултат от нелинейности в системата, свързани с изрязване на изходния контролен сигнал и може никога да не се наблюдава в линейна система.
Влиянието на интегралната част може да бъде ограничено чрез условна интеграция. Докато грешката е достатъчно голяма, нейната интегрална част не е необходима за формиране на управляващия сигнал, но пропорционалната част е достатъчна за управление.
Неразделната част, използвана за елиминиране на стационарни грешки, е необходима само в случаите, когато грешката е относително малка. При условно интегриране този компонент се взема предвид в крайния сигнал само ако грешката не надвишава определена прагова стойност. За големи грешки PI контролерът работи като P контролер. Изборът на прагова стойност за активиране на интегралния член не е лесна задача. При аналоговите контролери условното интегриране се извършва с помощта на ценеров диод (ограничител), който е свързан паралелно с кондензатор във веригата за обратна връзка на операционния усилвател в интегриращия блок на контролера. Такава схема ограничава приноса на интегрирания сигнал.
В цифровите PID контролери интегралното насищане е по-лесно да се избегне. Интегралната част се регулира при всеки интервал на вземане на проби, така че изходът на контролера да не надвишава определена граница.
Контролният сигнал първо се изчислява с помощта на алгоритъм на PI контролер и след това се проверява дали надвишава зададените граници:
u = u мин , ако u д < u мин ;
u = u д , ако u мин ≤ u д < u макс ;
u = u макс , ако u д ≤ u макс ;
След ограничаване на изходния сигнал интегралната част на регулатора се нулира. По-долу е примерна програма за PI контролер със защита от насищане.
Докато управляващият сигнал остава в зададените граници, последният оператор в програмния текст не засяга интегралната част на контролера.
(*инициализация*) c1:=K*taus/Ti;
(*регулатор*)
Ipart:= Ipart + c1*e;
ud:=K*e+Ipart; (*изчисление на контролен сигнал*)
ако (уд иначе ако (уд<
umax) then u:= ud Ipart:=u-K*e; (* корекция на неразделна част "анти-насищане" *) Илюстрация на проблема с интегралното насищане за позициониращо задвижване с PI контролер е по-нататък на фиг. 30.4. Плавно превключване на режимите на работа.
При превключване от ръчен към автоматичен режим изходът на контролера може да скочи, дори ако грешката при управление е нула. Причината е, че интегралният член в алгоритъма на контролера не винаги е равен на нула. Контролерът е динамична система, а неразделната част е един от елементите на вътрешното състояние, който трябва да се знае при промяна на режима на управление. Скокът в изходната стойност на контролера може да бъде предотвратен и промяната на режима в този случай се нарича безударен преход (безударен трансфер). Възможни са две ситуации: а) преминаване от ръчен към автоматичен режим или обратно; б) промяна на параметрите на контролера. Плавен преход в случай а) за аналогов контролер се постига чрез ръчно привеждане на процеса до състояние, при което измерената изходна стойност е равна на референтната стойност. Процесът се поддържа в това състояние, докато изходът на контролера е нула. В този случай интегралната част също е нула и тъй като грешката е нула, се постига плавен преход. Тази процедура е валидна и за цифрови контролери. Друг метод е бавното привеждане на референтната стойност до необходимата крайна стойност. Първо, референтната стойност се настройва равна на текущото измерване и след това постепенно се регулира ръчно до желаната стойност. Ако тази процедура се изпълнява достатъчно бавно, интегралната част от сигнала на контролера остава толкова малка, че се осигурява плавен преход. Недостатъкът на този метод е, че изисква доста дълго време, което зависи от естеството на процеса. Ограничаване на скоростта на промяна на управляващия сигнал
. В много системи за управление е необходимо да се ограничи както амплитудата, така и скоростта на промяна на управляващия сигнал. За целта се използват специални защитни схеми, свързани след канала за ръчно въвеждане на референтната стойност. u ° С (T) и предаване на филтрирания сигнал към контролера u Л (T), както е показано на фиг. 30.5. В резултат на това процесът "вижда" този контролен сигнал вместо ръчно въведения. Този метод обикновено се използва при регулиране на електрически задвижвания. Ограничаването на скоростта на промяна на сигнала може да се постигне с обикновена обратна връзка. Сигнал за ръчно управление u ° С (T), действащ като еталон, се сравнява с валиден контролен сигнал u Л (T). Първо, тяхната разлика е ограничена от границите ueмини uдмо. След това получената стойност се интегрира, като интегралът се апроксимира с крайна сума. Алгоритъмът за ограничаване на скоростта на промяна е следният: ако (е< uemin) then uelim:= uemin
(*функция ограничения*)
else if (ue < uemax) then uelim:= ue иначе uelim:= uemax; uL = uL_old + taus*uelim; Изчислителни характеристики на алгоритъма на ПИД регулатора.
Цифровата реализация на PID контролера, поради последователния характер на изчисленията, води до закъснения, които не се срещат в аналоговата технология. В допълнение, някои ограничения (защита от насищане и алгоритми за мек преход) изискват изходът на регулатора и MI пикап да се появят едновременно. Следователно изчислителните забавяния трябва да бъдат сведени до минимум. За да направите това, някои елементи на цифровия регулатор се изчисляват преди времето за вземане на проби. За регулатор със защита от насищане интегралната част може да бъде изчислена предварително, като се използват предни разлики u аз
(k + 1)
=u аз (к)+cедин · д
(к)
+ ° С 2 ·
[u
(к)
– u д
(к)
] , където u
– ограничена стойност u д
; T T
е коефициент, наречен времева константа за проследяване. Диференциалната част изглежда така ° С 3
=
(1–
b)
· К· T д
/T с
;
х
(к- 1) =
b·
u д (к- 1)+c 3 · г
(к- 1). променлива хмогат да бъдат актуализирани веднага след момента във времето к х
(к) =
b·
х(к- 1)+c 3 (1 –
b)
· г
(к). По този начин, u д (к
+
1)
може да се изчисли от (24.2) веднага щом се получи резултатът от измерването г(к
+
1). Необходима е оптимизация на изчисленията, тъй като цифровият регулатор понякога трябва да извършва няколко хиляди контролни операции в секунда. При тези условия е важно някои коефициенти да са налични веднага, вместо да се преизчисляват всеки път. Освен това индустриалните регулатори нямат най-бързите процесори ( аз 386, 486). Следователно редът и видът на изчисленията влияят значително върху скоростта на контролните операции. PID алгоритъм
. Пример за програма на PID контролер в Pascal. Изчисляване на коефициентите ° С 1 ,° С 2 и ° С 3 трябва да се направи само ако се променят параметрите на контролера К,
T аз
,
T ди T f. Алгоритъмът на контролера се изпълнява по време на всяка проба. Програмата има защита срещу насищане на интегралния компонент. (*Предварително изчисляване на коефициентите*) c1:=K*таус /
Ti; (* Уравнение 23.7 *) с2:= taus /
Tt; (* Уравнение 24.1 *) бета:=Td /
(Td+taus*N); (* Уравнение 24.1 *) c3:= K*Td*(l-бета) /
таус; (* Уравнение 24.2 *) c4:= c3*(1 - бета); (* локална константа*) (* Алгоритъм за управление *) uc:=ADinput(ch1); (* вход на референтна стойност, аналогов вход *) y:= AD_input(ch2); (* вход за измерване, аналогов вход *) e:= uc-y; (* изчисляване на контролната грешка *) ppart:= K*e; (*пропорционална част*) dpart:= x - (c3*y); (* диференциална част, *) ud:=uO+ppart+ipart+dpart; (* изход на регулатора преди изрязване*)if(ud Студенти, докторанти, млади учени, които използват базата от знания в обучението и работата си, ще ви бъдат много благодарни. Хоствано на http://www.allbest.ru Министерство на образованието и науката на Руската федерация Федерална държавна бюджетна образователна институция висше професионално образование "КУБАН ДЪРЖАВЕН УНИВЕРСИТЕТ" (FGBOU VPO "KubGU") ЗАКЛЮЧИТЕЛНА КВАЛИФИКАЦИОННА РАБОТА ЗА БАКАЛАВЪР Разработка и проектиране на ПИД регулатори Работата е извършена от Роман Валериевич Пресняков научен съветник д-р физ.-мат. науки, професор Е.Н. Тумаев Контрольор канд. физ.-мат. науки, доц. А. А. Мартинов Краснодар 2015 г Заключителна квалификационна работа 83 страници, 29 снимки, 42 източника. PID УПРАВЛЕНИЕ, ВГРАДЕНИ СИСТЕМИ, МИКРОКОНТРОЛЕРИ, СОФТУЕРНИ МОДУЛИ, MSP430, ПРЕКЪСВАНЕ Обектът на изследване на крайната квалификационна работа е изучаването на общите принципи на изграждане на пропорционално-интегрално-диференциални технологични регулатори и проектиране на алгоритъм за температурни регулатори на базата на евтини микроконтролери MSP430 (Texas Instruments). В статията е направен преглед на средствата на съвременните микроконтролери и принципите на тяхната работа. Извършен е анализ на проблемите на хардуерната и софтуерната реализация на технологични микропроцесорни контролери. Дадени са препоръки за проектиране на микропроцесорни измервателни и контролни уреди и създаване на софтуер за вградени системи. Предложен е вариант на реализация на алгоритъма на ПИД регулатора. Отличителна черта е използването на алгоритми, които изключват използването на числа с плаваща запетая. Обозначения и съкращения Въведение 2. Функции на чувствителността. Цифрово Pid уравнение 2.2 Дискретна форма на контролера. Цифрово PID уравнение 3. Нормативно качество 3.1 Отслабване на влиянието на външните смущения. Критерии за качество 4. Настройка на параметрите на контролера. основни принципи 4.1 Избор на параметри на контролера. Ръчни и автоматични настройки 5. Програмиране на вградени системи 5.1 Общи принципи за разработване на вградени системи 5.2 Етапи на създаване на софтуер за вградени системи 5.3 Йерархия на изпълнимия код във вградените системи 6. Алгоритъм на създадения софтуер 6.1 Описание на алгоритъма на работа на PID температурния регулатор, базиран на микроконтролера MSP430F149 Заключение Списък на използваните източници Обозначения и съкращения температурен контролер микроконтролер микроконтролер PID алгоритъм Пропорционално-интегрално-диференциален алгоритъм слой за хардуерна абстракция (слой за хардуерна абстракция) Интегрирана среда за разработка (интегрирана среда за разработка) широчинно импулсна модулация програмируем логически контролер надзорен контрол и събиране на данни (надзорен контрол и събиране на данни) сериен периферен интерфейс (сериен периферен интерфейс) интерфейс за програмиране на приложения (интерфейс за програмиране на приложения) автоматизирано работно място софтуер ВЪВЕДЕНИЕ Управлението на технологичните процеси с помощта на регулатори, работещи по пропорционално-интегрално-диференциалния закон (PID регулатори), позволява поддържане на необходимата технологична стойност с достатъчно висока точност и приемлива шумоустойчивост към външни смущаващи влияния. Съвременните PID контролери се изпълняват както като софтуерен модул на SCADA система, изпълнявана на автоматизирана работна станция (AWS) или програмируем логически контролер (PLC), така и като отделни контролери за процеси, разположени на локални и централни контролни шкафове. Като основни елементи за обработка и управление на информацията често се използват микропроцесори с ограничена функционалност, което поставя проблема с липсата на хардуерни ресурси и оскъпяването на системата. Целта на тази работа е да се разгледат принципите за изграждане на пропорционално-интегрално-производни регулатори и да се разработят, въз основа на прегледа, принципите за създаване на температурен PID регулатор. При създаването на температурен PID регулатор са използвани програмируем микропроцесорен технологичен измервателен регулатор F0303.2 на базата на микроконтролера MSP430F149, програматор MSP-FET430UIF, компаратор на напрежение P3003 с диапазон на изходното напрежение от 10 nV до 11.111110 V и клас на точност 0.0005 . Програмата за микроконтролер е създадена в интегрирана среда за разработка IAR Embedded Workbench за MSP430 6. Техническата документация е получена от уебсайта на производителя на микроконтролера. За пълното внедряване на PID управление в микропроцесорно устройство е необходимо внедряването на следните подсистеми: Подсистема за измерване Подсистема за обработка на PID алгоритъм Подсистема за потребителски интерфейс за управление Подсистема за извеждане на регулаторно въздействие 1. Принципи на създаване на ПИД регулатори 1.1 Общи въпроси на внедряването на PID регулатори За практическа реализация е необходимо да се вземат предвид характеристиките, генерирани от реалните условия на приложение и техническо изпълнение. Тези характеристики включват: Краен динамичен обхват на промените във физическите променливи в системата (напр. ограничена мощност на нагревателя, ограничен капацитет на вентила); Не винаги е възможно да се промени знакът на контролното действие (например често няма хладилник в системата за поддържане на температурата, двигателят може да няма обратен ход, не всеки самолет има система с отрицателна тяга); Ограничена точност на измерване, което изисква специални мерки за извършване на операцията за диференциране с приемлива грешка; Наличието на типични нелинейности в почти всички системи: насищане (ограничаване на динамичния обхват на променливите промени), ограничаване на скоростта на набиране, хистерезис и обратна реакция; Технологична дисперсия и случайни изменения на параметрите на регулатора и обекта; Дискретна реализация на контролера; Необходимостта от плавно (безударно) превключване на режимите на управление; 1.2 Производен монтаж на PID Проблемът с цифровото диференциране е доста стар и често срещан както в цифровите, така и в аналоговите контролери. Неговата същност се състои в това, че производната обикновено се изчислява като разлика между две променливи с близка величина, така че относителната грешка на производната винаги се оказва по-голяма от относителната грешка на численото представяне на диференцируемата променлива. По-специално, ако входът на диференциатора получи синусоидален сигнал A * sin (sht), тогава на изхода получаваме A * w * cos (sht), т.е. с увеличаване на честотата w, амплитудата на сигнала при производителността на диференциатора се увеличава. С други думи, диференциаторът усилва високочестотните смущения, късите изблици и шума. Ако смущенията, усилени от диференциатора, са извън работния честотен диапазон на PID контролера, тогава те могат да бъдат отслабени с помощта на високочестотен филтър. Структурното изпълнение на диференциатор с филтър е показано на фигура 1. Тук т.е. трансферната функция на получения диференциатор D(s) може да бъде представена като произведение на трансферната функция на идеален диференциатор и трансферната функция на филтър от първи ред: където коефициентът N задава граничната честота на филтъра и обикновено се избира равен на 2…20; T/N -- времеконстанта на филтъра; s е комплексната честота. По-голямо затихване на високочестотния шум може да се постигне с отделен филтър, който е свързан последователно с PID контролера. Обикновено се използва филтър от втори ред с предавателна функция Времеконстантата на филтъра е избрана равна на TF = Ti/N, където N = 2…20, Ti е интеграционната константа на PID контролера. Препоръчително е да не избирате граничната честота на филтъра под честотата 1/Ti, тъй като това усложнява изчисляването на параметрите на контролера и границата на стабилност. Фигура 1 - Структурно изпълнение на диференциалния член на PID регулатора В допълнение към диференциалния шум, работата на PID контролера се влияе от шума от измерването. Чрез веригата за обратна връзка тези шумове влизат във входа на системата и след това се появяват като дисперсия на управляващата променлива u. Високочестотният шум е вреден, тъй като предизвиква ускорено износване на тръбопроводната арматура и електродвигателите. Тъй като контролният обект обикновено е нискочестотен филтър, шумът от измерването рядко преминава през контролния контур към изхода на системата. Те обаче увеличават грешката на измерване y(t) и намаляват точността на регулиране. В PID регулаторите шумът със спектър в нискочестотната област, причинен от външни влияния върху обекта на управление, и високочестотният шум, свързан с електромагнитни смущения, шум на захранващите и заземяващите шини, с дискретизация на измерения сигнал и разграничават се други причини. Нискочестотният шум се моделира като външно смущение d(s), високочестотният шум се моделира като шум от измерване n(s). 1.3 Вграден възел на PID контролера. интегрална наситеност При стабилен режим на работа и с малки смущения повечето системи с PID контролери са линейни. Процесът на влизане в режим обаче почти винаги изисква отчитане на нелинейността на типа „ограничение“. Тази нелинейност се дължи на естествени ограничения на мощността, скоростта, оборотите в минута, ъгъла на въртене, площта на напречното сечение на клапана, динамичния диапазон и т.н. Контролният контур в система, която е в насищане (когато променливата е достигнала лимита), се оказва отворен, тъй като когато променливата на входа на връзката с лимита се промени, нейната изходна променлива остава непроменена. Най-типичното проявление на режима на ограничаване е така нареченото "интегрално насищане", което се получава, когато системата достигне режим в контролери с ненулева константа на интегриране Ti? 0. Интегралното насищане води до забавяне на преходния процес (Фигури 2 и 3). Подобен ефект възниква поради ограничението на пропорционалния и интегралния член на PID регулатора (фигури 4 и 5). Интегралното насищане обаче често се разбира като набор от ефекти, свързани с нелинейност от типа „ограничение“. T 1 = 0.1 s; Т2 =0.05 s; L = 0.02 s; К = 2; Ti = 0.06 s; Td = 0 Фигура 2 - Отговорът на изходната променлива y(t) към скока на входното действие r(t) за PI контролера при условие на ограничаване на мощността на входа на обекта u(t) и без ограничение (второ обект на поръчка) T1 = 0,1 s; T2 = 0,05 s; L = 0.02 s; К = 2; Ti = 0.06 s; Td = 0 Фигура 3 - Сигнал на входа на обекта u(t) с и без ограничение на мощността (обект от втори ред) К = 10; Ti = 0.014 s; Td = 0,3 s; T1 = 0,1 s; T2 = 0,05 s; L = 0,02 s Фигура 4 - Отговорът на изходната променлива y(t) към скока на входното действие r(t) за PID регулатора при условие на ограничаване на мощността на входа на обекта u(t) и без ограничение (второ обект на поръчка) T1 = 0,1 s; T2 = 0,05 s; L = 0.02 s; К = 10; Ti = 0.014 s; Td = 0,3 s Фигура 5 - Сигналът на входа на обекта u(t) в контура с PID контролера при условие на ограничение на мощността и без (обект от втори ред) и втори ред където Kp е коефициентът на пренос в стационарно състояние; T, T1, T2 - времеконстанти; L - транспортно забавяне. Същността на проблема с интегралното насищане е, че ако сигналът на входа на управляващия обект u(t) е влязъл в зоната на насищане (ограничение) и сигналът за несъответствие r(t) - y(t) не е равен на нула, интеграторът продължава да интегрира, тоест сигналът се увеличава на изхода си, но този сигнал не участва в процеса на регулиране и не засяга обекта поради ефекта на насищане. Системата за управление в този случай става еквивалентна на отворена система, чийто входен сигнал е равен на нивото на насищане на управляващия сигнал u(t). За топлинни системи долната граница обикновено е нулева топлинна мощност, докато PID контролерът изисква „отрицателна топлинна мощност“, която да бъде приложена към обекта, тоест охлаждане на обекта. Ефектът на интегралното насищане е известен отдавна. В аналоговите регулатори елиминирането му беше доста трудно, тъй като в тях проблемът не можеше да бъде решен алгоритмично, а беше решен само хардуерно. С появата на микропроцесорите проблемът може да се реши много по-ефективно. Методите за премахване на интегралното насищане обикновено са обект на изобретения, принадлежат към търговската тайна на производствените компании и са защитени с патенти. Ограничаване на скоростта на нарастване на входното действие. Тъй като максималната стойност на входното действие върху контролния обект u(t) намалява с намаляване на разликата r(t) - y(t), за да елиминирате ограничаващия ефект, можете просто да намалите скоростта на нарастване на сигнала на зададената точка r(t), например, с помощта на филтър. Недостатъкът на този метод е намаляването на скоростта на системата, както и невъзможността да се елиминира интегралното насищане, причинено от външни смущения, а не от сигнала на заданието. Когато управляващото действие върху обекта достигне насищане, обратната връзка се прекъсва и интегралният компонент продължава да расте, дори ако е трябвало да падне при липса на насищане. Следователно, един от методите за елиминиране на интегралното насищане е, че контролерът следи големината на управляващото въздействие върху обекта и веднага щом достигне насищане, контролерът въвежда софтуерна забрана за интегриране на интегралния компонент. Компенсация на насищане с допълнителна обратна връзка. Ефектът на интегралното насищане може да бъде отслабен чрез наблюдение на състоянието на задвижващия механизъм, влизащ в насищане, и компенсиране на сигнала, приложен към входа на интегратора. Структурата на система с такъв компенсатор е показана на фигура 6. Фигура 6 - Компенсация на ефекта на интегралното насищане с помощта на допълнителна обратна връзка за предаване на сигнала за грешка es към входа на интегратора Принципът на неговата работа е следният. Системата генерира сигнал за несъответствие между входа и изхода на задвижващия механизъм es = u - v. Сигналът на изхода на задвижващия механизъм се измерва или изчислява с помощта на математически модел (Фигура 6). Ако es = 0, това е еквивалентно на липса на компенсатор и получаваме нормален PID контролер. Ако изпълнително устройствонасища, тогава v > u и es< 0. При этом сигнал на входе интегратора уменьшается на величину ошибки es, что приводит к замедлению роста сигнала на выходе интегратора, уменьшению сигнала рассогласования и величины выброса на переходной характеристике системы (рисунки 7 и 8). Постоянная времени Ts определяет степень компенсации сигнала рассогласования. Фигура 7 - Отговор на системата на единичен скок r(t) за различни стойности на времевата константа Ts К = 7; Ti = 0.01 s; Td = 0,1 s T1 = 0,1 s; T2 = 0,05 s; L = 0,01 s Фигура 8 - Отговор на системата на сигнала за грешка es (обект от втори ред, параметри на контролера: В някои контролери входът u на устройството за сравнение es е отделен като отделен вход - „вход за проследяване“, което е удобно при изграждане на сложни системи за управление и при каскадно свързване на няколко контролера. Условна интеграция. Този метод е обобщение на алгоритмичната забрана за интегриране. След настъпване на забраната интегралният компонент остава постоянен, на същото ниво, на което е бил в момента на възникване на забраната за интегриране. Обобщението е, че забраната за интегриране възниква не само при достигане на насищане, но и при определени други условия. Такова условие може да бъде например постигането чрез сигнала за грешка e или изходната променлива y на определена зададена стойност. При изключване на процеса на интеграция е необходимо да се следи състоянието на интегратора в момента на изключването му. Ако натрупа грешка и степента на насищане се увеличи, тогава интеграцията се изключва. Ако в момента на изключване степента на насищане намалее, тогава интеграторът остава включен. Фигура 9 показва пример на преходен процес в система с изключен интегратор, когато изходната стойност y(t) достигне дадена стойност (y = 0, y = 0.2, y = 0.8). Фигура 9 - Отговор на единичен скок r(t) на система с насищане на задвижващия механизъм при различни нива на изключване на интегратора y Ограничен интегратор. Представен е вариант на изпълнение на PI регулатора с помощта на интегратор в обратната връзка. Ако тази схема е допълнена с ограничител (Фигура 10), тогава сигналът u на изхода никога няма да надхвърли границите, определени от праговете на ограничителя, което намалява превишаването на преходния отговор на системата (Фигура 12). Фигура 11 показва модификация на такъв ограничител. Моделът на ефекта на изрязване може да бъде подобрен, ако след превишаване на нивото, при което възниква изрязването, сигналът на изхода на модела се намали (Фигура 13). Това ускорява възстановяването на системата от режим на насищане. Фигура 10 - Модификация на интегратора с ограничител (паралелно) Фигура 11 - Модификация на интегратора с ограничител (последователно) Фигура 12 - Отговор на единичен скок r(t) на система, съдържаща интегратор с горно ограничение Uup Фигура 13 - Подобрена трансферна функция на модел на клипинг ефект 1.4 Граница на стабилност на системата. Критерий на Найкуист Възможността за загуба на стабилност е основният недостатък на системите с обратна връзка. Следователно осигуряването на необходимата граница на стабилност е най-важната стъпка в разработването и настройката на PID контролера. Стабилността на система с PID регулатор е способността на системата да се върне към проследяване на зададената точка след прекратяване на външни влияния. В контекста на това определение външните влияния означават не само външни смущения, действащи върху обекта, но и всякакви смущения, действащи върху която и да е част от затворената система, включително шум от измерване, нестабилност на зададената времева точка, шум от вземане на проби и квантуване, шум и грешка в изчисленията. Всички тези смущения предизвикват отклонения на системата от равновесното положение. Ако след прекратяване на тяхното влияние системата се връща в равновесно положение, тогава се счита за стабилна. Когато се анализира стабилността на PID регулаторите, обикновено се ограничава до изследване на реакцията на системата към стъпкова промяна в зададената стойност r(t), шума от измерването n(t) и външните смущения d(t). Загубата на устойчивост се проявява като неограничено нарастване на управляваната величина на обекта или като нейно трептене с нарастваща амплитуда. В производствени условия опитите да се постигне стабилност на система с PID регулатор емпирично, без неговата идентификация, не винаги водят до успех (на първо място, това се отнася за системи с обект от висок ред или обекти, които са трудни за идентифициране , както и системи с голямо транспортно забавяне) . Изглежда, че стабилността е мистично свойство, което не винаги може да бъде контролирано. Ако обаче процесът се идентифицира достатъчно точно, тогава мистицизмът изчезва и анализът на стабилността се свежда до анализ на диференциално уравнение, описващо затворен контур с обратна връзка. От практически интерес е анализът на границата на стабилност, т.е. определянето на числените стойности на критериите, които ви позволяват да посочите колко далеч е системата от състоянието на нестабилност. Най-пълната информация за границата на стабилност на системата може да бъде получена чрез решаване на диференциално уравнение, което описва затворена система при външни смущения. Този процес обаче отнема твърде много време, поради което за линейни системи се използват опростени методи за оценка на границата на стабилност без решаване на уравнения. Ще разгледаме два метода за оценка: използване на ходографа на сложната отворена честотна характеристика (критерий на Найкуист) и използване на логаритмична честотна характеристика и фазова характеристика (графики на Боде). Една стабилна система може да стане нестабилна при малки промени в нейните параметри, например поради тяхната технологична дисперсия. Следователно, по-нататък ще анализираме функцията на чувствителност на система с PID контролер, която ни позволява да идентифицираме условията, при които системата става груба (нечувствителна към промени в нейните параметри). Система, която поддържа дадена граница на стабилност в целия диапазон от промени в параметрите поради тяхното технологично изменение, стареене, условия на работа, в целия диапазон от промени в параметрите на натоварването, както и в целия диапазон от смущения, действащи върху системата в реални условия. условия на работа, се нарича здрав. Понякога здравината и грубостта се използват като еквивалентни понятия. Критерий на Найкуист. Да разгледаме система, състояща се от контролер R и контролен обект P (Фигура 14), който се получава чрез елиминиране на веригата на сигнала на зададената точка от класическа система с PID контролер. Ще приемем, че обратната връзка е отворена и за да я затворим, е достатъчно да свържем точките x и y. Нека сега приемем, че на входа x е даден сигнал След това, преминавайки през контролера и контролния обект, този сигнал ще се появи на изхода y с променена амплитуда и фаза във формата: y(t) =? |G(jw0)|sin(w0t + ?), (4) където G(jsh) = R(jsh)P(jsh) е комплексната честотна характеристика (CFC) на системата, ? = arg(G(jш0)) - CCH аргумент, |G(jш0)| - CFC модул на честота w0. Така при преминаване през регулатора и обекта амплитудата на сигнала ще се променя пропорционално на модула, а фазата - на стойността на аргумента CFC. Фигура 14 - Структура на система за управление с отворена верига с PID контролер за анализ на стабилността Ако сега затворим точките x и y, тогава сигналът ще циркулира в затворен контур и условието y(t) = x(t) ще бъде изпълнено. Ако освен това |G(jш0)| ? 1 и? \u003d 180 °, т.е. след преминаване през цикъла сигналът влиза във входа на контролера в същата фаза, както в предишния цикъл, след което след всяко преминаване през контура амплитудата на синусоидалния сигнал ще се увеличи, докато достигне граница на обхвата на линейността на системата, след което формата на трептене става различна от синусоидална. В този случай методът на хармонична линеаризация може да се използва за анализ на стабилността, когато се разглежда само първият хармоник на изкривения сигнал. В стационарно състояние, след като амплитудата на трептенията е ограничена, поради равенството y(t) = x(t), ще бъде изпълнено следното условие: |G(jw0)|=1, т.е. G(jw0)= - 1 (5) Като решите уравнението G(jw0) = -1, можете да намерите честотата на трептенията w0 в затворена система. Комплексната честотна характеристика G(jш) е изобразена графично под формата на ходограф (диаграма на Найкуист) - графика в координатите Re и Im (Фигура 15). Стрелката на линията на ходографа показва посоката на движение на "молива" с нарастваща честота. Точката G(jw0) = -1, която съответства на условието за наличие на незатихващи трептения в системата, на тази графика има координати Re = -1 и Im = 0. Следователно критерият за устойчивост на Найкуист се формулира, както следва : верига, която е стабилна в отворено състояние, ще остане стабилна и след затварянето си, ако нейният CFC в отворено състояние не покрива точката с координати [-1, j0]. По-стриктно, когато се движите по траекторията на ходографа в посока на нарастваща честота, точката [-1, j0] трябва да остане отляво, така че затворената верига да е стабилна. К=6; T1 = T2 = 0,1 s; L = 0,01 s Фигура 15 - Три ходографа на CFC на отворена система G(jw) за обект от втори ред Фигура 16 показва реакциите на затворена система с три различни ходографа (Фигура 15) на една стъпка на заданието. И в трите случая системата е стабилна, но скоростта на затихване на трептенията и формата на прехода процесът им е различен. Интуитивно е ясно, че система с параметри Ti = 0,01 s, Td = 0,1 s е най-близо до преминаване в състояние на незатихващи трептения с малка промяна в параметрите. Ето защо при проектирането на PID регулатор е важно да се осигури не толкова стабилност, колкото неговия резерв, който е необходим за нормалното функциониране на системата в реални условия. Маржът на стабилност се оценява като степента на отдалеченост на CFC от критичната точка [-1, j0]. Ако |G(jш0)|< 1, то можно найти, во сколько раз осталось увеличить передаточную функцию, чтобы результирующее усиление вывело систему в колебательный режим: gm|G(jщ0)| = 1, откуда Маржът на усилване gm е стойността, с която трансферната функция на отворена система G(jsh180) трябва да бъде умножена, така че нейният модул при честота на фазово изместване от 180 ° (sh180) да стане равен на 1. Ако при честота от w180 усилването при отворена верига е G(jsh180) = -1/gm (фиг. 15), тогава допълнително усилване от gm ще доведе системата до точка [-1, j0], тъй като (-1/gm) gm = -1. Концепцията за фазов запас се въвежда по подобен начин: това е минималната стойност m, с която е необходимо да се увеличи фазовото изместване в отворена система arg(G(jw)), така че общото фазово изместване да достигне 180°, т.е. Знакът „+“ преди arg(G(jш1)) е защото arg(G(jш1))< 0. Для оценки запаса устойчивости используют также минимальное расстояние sm от кривой годографа до точки [-1, j0] (рисунок 15). На практика се считат за приемливи стойностите gm = 2...5,m = 30...60°, sm = 0,5...0,8 За графиката на фигура 15 тези критерии имат следните стойности: Gm1 = 12,1; m1 = 15°; sm1 = 0,303 (за случая Ti = 0,01 s, Gm2 = 11,8; m2 = 47,6°; sm2 = 0,663 (за случая Ti = 0,05 s, Gm3 = 1,5; m3 = 35,2°; sm3 = 0,251 (за случая Ti = 0,05 s, Ако кривата на ходографа пресича реалната ос в няколко точки, тогава за да оцените границата на стабилност, вземете тази, която е най-близо до точката [-1, j0]. При по-сложен ходограф може да се използва оценка на границата на стабилност като граница на забавяне. Маржът на забавяне е минималното забавяне, добавено към цикъла, за да го направи нестабилен. Най-често този критерий се използва за оценка на границата на стабилност на системи с предиктора на Смит. Критерий за стабилност на честотата За графично представяне на предавателната функция на отворена система и оценка на границата на стабилност могат да се използват логаритмична честотна характеристика и фазова характеристика (Фигура 17). За да се оцени фазовият запас, първо, като се използва честотната характеристика, се намира честотата u1 (честота на срязване или единична честота на усилване), при която G(ju1) = 1, след което съответният фазов запас се намира от PFC. За да оцените границата на усилване, първо, като използвате PFC, намерете честотата w180, при която фазовото изместване е 180 °, след това намерете границата на усилване от честотната характеристика. Фигура 17 показва примери на графични конструкции за оценка на печалбата и маржа на фазата за системата, чиито ходографи са показани на фигура 15. Ако фазовият марж на отворената верига е 0° или маржът на усилване е 1, системата ще бъде нестабилна след затваряне на обратната връзка. Фигура 16 - Преходна реакция на затворена система, която има ходографи, показани на фигура 15 2. Функции на чувствителността. уравнение на цифровия PID контролер 2.1 Функции на чувствителността. здравина. Безударно превключване на режимите на управление Трансферната функция на реален обект P(s) може да се промени по време на работа със стойността DP(s), например поради промени в натоварването на вала на двигателя, броя на яйцата в инкубатора, нивото или състава на течността в автоклава, поради стареене и износване на материала, поява на луфтове, промени в смазването и др. Правилно проектираната автоматична система за управление трябва да поддържа качествените си показатели не само в идеални условия, но и при наличието на изброените вредни фактори. Да се оцени влиянието на относителна промяна в трансферната функция на обекта DP / P върху трансферната функция на затворената система Gcl y(s) = r(s), Gcl(s) = (8) намерете диференциала dGcl: Разделяйки двете страни на това равенство на Gcl и замествайки Gcl = PR/(1+PR) в дясната страна, получаваме: Фигура 17 - Оценка на усилването и маржа на фазата за система с ходограф, показан на Фигура 15 От (10) се вижда значението на коефициента S - той характеризира степента на влияние на относителното изменение на предавателната функция на обекта върху относителното изменение на предавателната функция на затворения контур, т.е. S е коефициентът на чувствителността на затворения контур към изменението на предавателната функция на обекта. Тъй като коефициентът S \u003d S (jsh) зависи от честотата, той се нарича функция на чувствителност. Както следва от (10), Нека въведем обозначението: Стойността T се нарича допълнителна (допълнителна) функция на чувствителност, тъй като S + T = 1. Функцията на чувствителност ви позволява да оцените промяната в свойствата на системата след затваряне на обратната връзка. Тъй като трансферната функция на отворена система е равна на G = PR, а на затворена система Gcl = PR/(1+PR), тогава тяхното съотношение е Gcl/G = S. По същия начин за отворена система трансферната функция от входа на смущенията d към изхода на затворена система е (вижте) P(s)/(1 + P(s)R(s)), а отворената верига е P(s), така че тяхното съотношение също е S. За трансферната функция от входа на шума от измерването n към изхода на системата може да се получи същото съотношение S. По този начин, знаейки формата на функцията S(jw) (например Фигура 18), можем да кажем как потискането на външни влияния върху системата ще се промени за различни честоти след затваряне на обратната връзка. Очевидно шумовете, лежащи в честотния диапазон, в който |S(jш)| > 1, след затваряне обратната връзка ще се увеличи и шумът с честоти, при които |S(jш)|< 1, после замыкания обратной связи будут ослаблены. Най-лошият случай (най-голямото усилване на външни влияния) ще се наблюдава при максималната честота Ms на модула на функцията на чувствителност (Фигура 18): Максимумът на функцията на чувствителност може да бъде свързан с границата на стабилност sm (Фигура 15). За това обръщаме внимание на факта, че |1 + G(jш)| представлява разстоянието от точката [-1, j0] до текущата точка на ходографа на функцията G(jш). Следователно минималното разстояние от точка [-1, j0] до функция G(jш) е равна на: Сравнявайки (13) и (14), можем да заключим, че sm = 1/Ms. Ако модулът G(jsh) намалява с увеличаване на честотата, тогава, както може да се види от Фигура 15, (1-sm) ? 1/gm. Замествайки тук съотношението sm = 1/Ms, получаваме оценка на маржа на печалба, изразен като максимума на функцията на чувствителност: По подобен начин, но с по-груби предположения, можем да напишем оценката на фазовия марж по отношение на максимума на функцията на чувствителност: Например за Ms = 2 получаваме gm ? 2 и? 29°. Фигура 18 - Функции на чувствителността за системата с ходографи, показана на Фигура 13 Устойчивостта е способността на системата да поддържа дадена граница на стабилност с промени в нейните параметри, причинени от промяна в натоварването (например, когато натоварването на пещта се променя, нейните времеви константи се променят), технологично разпространение на параметрите и тяхното стареене, външни влияния , грешки в изчисленията и грешка на обектния модел. Използвайки концепцията за чувствителност, можем да кажем, че устойчивостта е ниска чувствителност на границата на стабилност към промените в параметрите на даден обект. Ако параметрите на обекта се променят в малки граници, когато е възможно да се използва замяната на диференциала с ограничено увеличение, ефектът от промените в параметрите на обекта върху предавателната функция на затворената система може да се оцени с помощта на функция на чувствителност (10). По-специално може да се заключи, че при тези честоти, където модулът на функцията на чувствителност е малък, ефектът от промените в параметрите на обекта върху предавателната функция на затворена система и съответно върху границата на стабилност ще бъде малък. За да оценим въздействието на големи промени в параметрите на обекта, представяме трансферната функция на обекта под формата на два термина: P = P0 + DP, (17) където P0 е изчислената трансферна функция, DP е отклонението от P0, което трябва да бъде стабилна трансферна функция. Тогава усилването на цикъла на отворена система може да бъде представено като G = RP0 + RDP = G0 + RDP. Тъй като разстоянието от точка [-1, j0] до текущата точка А на ходографа на невъзмутената система (за която DP = 0) е равно на |1 + G0| (Фигура 19), условието за стабилност за система с отклонение на усилването на веригата RDP може да бъде представено като: |RDP|< |1+G0|, където T е допълнителна функция на чувствителност (12). Накрая можем да напишем съотношението: което трябва да бъде изпълнено, за да може системата да остане стабилна, когато параметрите на процеса се променят със стойността на DP(jsh). Намаляване на нули и полюси. Тъй като функцията за пренос на отворена верига G = RP е продукт на две функции за прехвърляне, които в общ случайима както числител, така и знаменател, тогава е възможно да се съкратят полюсите, които лежат в дясната полуравнина или са близо до нея. Тъй като в реални условия, когато има разпръскване на параметрите, такова намаление се извършва неточно, може да възникне ситуация, когато теоретичен анализ води до заключението, че системата е стабилна, въпреки че всъщност с малко отклонение на параметрите на процеса от изчислените стойности, тя става нестабилна. Следователно, всеки път, когато полюсите се намаляват, е необходимо да се проверява стабилността на системата с реално разсейване на параметрите на обекта. Фигура 19 - Обяснение на извеждането на съотношението (18) Вторият ефект от скъсяването на полюсите е появата на значителна разлика между времето за установяване на преходния процес в затворена система под въздействието на сигнал на задание и външни смущения. Следователно е необходимо да се провери реакцията на синтезирания регулатор под въздействието не само на сигнала на заданието, но и на външни смущения. Безударно превключване на режимите на управление. В PID контролерите може да има режими, когато техните параметри се променят рязко. Например, когато е необходимо да се промени интеграционната константа в работеща система или когато след ръчно управление на системата е необходимо да се премине към автоматичен режим. В описаните случаи могат да възникнат нежелани превишавания на контролираната променлива, ако не се вземат специални мерки. Следователно възниква проблемът с плавното („безударно“) превключване на режимите на работа или параметрите на контролера. Основният метод за решаване на проблема е изграждането на такава структура на контролера, когато промяната на параметрите се извършва преди етапа на интегриране. Например, с променящ се параметър Ti = Ti (t), интегралният член може да бъде написан в две форми: I(t) = или I(t) = . В първия случай, когато Ti (t) се промени рязко, интегралният член ще се промени рязко, във втория случай той ще се промени плавно, тъй като Ti (t) е под интегралния знак, чиято стойност не може да се промени рязко. Подобен метод е реализиран в инкременталната форма на PID регулатора (виж раздел "Инкрементална форма на цифровия PID регулатор") и в серийната форма на PID регулатора, където интегрирането се извършва на последния етап от изчислението на управлението. 2.2 Уравнение на дискретния регулатор от цифровия PID регулатор Непрекъснатите променливи са удобни за използване за анализ и синтез на PID контролери. За техническа реализация е необходимо да се премине към дискретна форма на уравнения, тъй като основата на всички контролери е микроконтролер, контролер или компютър, който работи с променливи, получени от аналогови сигнали след тяхното квантуване по време и семплиране на ниво. Поради крайното време за изчисляване на управляващото действие в микроконтролера и забавянето на аналогово-цифровото преобразуване между момента на постъпване на аналоговия сигнал на входа на контролера и появата на управляващото въздействие на неговия изход, възниква нежелано забавяне. се появява, което увеличава общото забавяне в управляващия контур и намалява границата на стабилност. Основният ефект, който се появява по време на семплирането и който често се „преоткрива” е появата на псевдочестоти в спектъра на квантования сигнал в случай, че честотата на квантуване не е достатъчно висока. Подобен ефект се получава при заснемане на въртящо се колело на кола. Честотата на сигнала на псевдонима е равна на разликата между честотата на смущението и честотата на квантуване.В този случай високочестотният сигнал на смущение се измества към нискочестотната област, където се наслагва върху полезния сигнал и създава голям проблеми, тъй като е невъзможно да се филтрира на този етап. За да се елиминира ефектът на псевдонима, е необходимо да се инсталира аналогов филтър преди входа на аналогово-цифровия преобразувател, който да намали шума най-малко с един порядък при честота, равна на половината от честотата на квантуване. Обикновено се използва филтър на Батъруърт от втори или по-висок ред. Второто решение на проблема е да се увеличи честотата на квантуване, така че да е поне 2 пъти (според теоремата на Котелников) по-висока от максималната честота на спектъра на смущението. Това позволява прилагането на цифров нискочестотен филтър след квантуване. При такава честота на дискретизация полученият цифров сигнал е напълно еквивалентен на аналоговия по отношение на количеството информация и всички свойства на аналоговия контролер могат да бъдат разширени към цифровия. Преход към уравнения с крайни разлики. Преходът към дискретни променливи в уравненията на аналоговия контролер се извършва чрез замяна на производни и интеграли с техните дискретни двойници. Ако уравнението е написано в операторна форма, тогава първо се прави преход от областта на изображението към оригиналната област. В този случай операторът за диференциране се заменя с производна, операторът за интегриране се заменя с интеграл. Има много начини за приближаване на производни и интеграли чрез техните дискретни двойници, които са описани в курсовете по числени методи за решаване на диференциални уравнения. В PID регулаторите най-често срещаните са най-простите видове приближение на производната чрез крайна разлика и интеграла чрез крайна сума. Помислете за интегралния термин на PID контролера: Разграничавайки двете части по отношение на времето, получаваме Заменяйки диференциалите в този израз с крайни разлики (леви разлики), получаваме където индексът i означава, че дадената стойност е взета във време ti (обърнете внимание, че тук и по-долу индексът i в Ti не означава номера на времевата стъпка, а интегрален коефициент PID контролер). От последния израз получаваме: Така следващата стойност на интеграла може да се изчисли, като се знае предишната и стойността на грешката в предишния момент. Такава формула обаче има тенденция да натрупва грешка в изчислението с течение на времето, ако съотношението Dt/Ti не е достатъчно малко. Друга формула за интегриране е по-стабилна - с правилни разлики, когато стойността на грешката се взема едновременно с изчисления интеграл: Помислете за диференциалния член на PID контролер с филтър: Преминавайки в тази формула от изображения към оригинали, получаваме: Заменяйки диференциалите с крайни нараствания, получаваме уравнението на разликата: Забележете, че за конвергенцията на итеративния процес (21) е необходимо, че Когато Dt > Td/N, итеративният процес (21) става осцилаторен, което е неприемливо за PID регулатора. Уравнението на разликата, получено с помощта на правилните разлики, има най-добрите характеристики: Тук условието за конвергенция е изпълнено за всички Dt и не възникват колебания за никакви стойности на параметрите. В допълнение, последната формула ви позволява да "изключите" диференциалния компонент в PID контролера, като зададете Td = 0, което не може да бъде направено в израз (21), тъй като в този случай се получава деление на нула. Можете да използвате още по-прецизни формули за числено диференциране и интегриране, познати от курса по числени методи за решаване на уравнения. Стойността на цикъла на квантуване Dt е избрана възможно най-малка, което подобрява качеството на регулиране. За да се осигури добро качество на регулиране, то не трябва да бъде повече от 1/15...1/6 от времето за установяване на преходната реакция на обекта на ниво 0,95 или 1/4...1/6 от стойност на транспортното закъснение. Въпреки това, с увеличаване на честотата на квантуване с повече от 2 пъти в сравнение с горната честота на спектъра на смущаващи сигнали (според теоремата на Котелников), няма по-нататъшно подобряване на качеството на регулиране. Ако на входа на регулатора няма филтър против нагласи, тогава честотата на квантуване се избира 2 пъти по-висока от горната гранична честота на спектъра на шума, за да се използва цифрово филтриране. Трябва също така да се има предвид, че изпълнителното устройство трябва да има време да работи през времето Dt. Ако контролерът се използва не само за регулиране, но и за алармена сигнализация, тогава цикълът на квантуване не може да бъде по-малък от допустимото закъснение за работа на алармения сигнал. При малък цикъл на квантуване грешката при изчисляване на производната се увеличава. За да го намалите, можете да използвате изглаждането на получените данни върху няколко събрани точки преди етапа на диференциация. Уравнение на цифровия PID регулатор. Въз основа на горното уравнението на дискретния PID регулатор може да бъде написано като: където i е номерът на времевата стъпка. За да стартираме алгоритъма, обикновено избираме uD0 = 0, I0 = 0, e0 = 0, но може да има и други начални условия, в зависимост от значението на конкретен контролен проблем. Обърнете внимание, че алгоритъмът, получен чрез просто заместване на операторите за диференциране и интегриране в уравнението на класическия PID контролер крайни разлики и крайни суми има слаба стабилност и ниска точност, както беше показано по-рано. Въпреки това, когато честотата на вземане на проби се увеличава, разликата между горните два алгоритъма се изтрива. Инкрементална форма на цифров PID контролер. Доста често, особено в невронни мрежи и размити регулатори, уравнението на PID регулатора се използва под формата на зависимост на увеличението на управляващата променлива от грешката на управлението и нейните производни (без интегрален член).Това представяне е удобно, когато външно устройство играе ролята на интегратор, например конвенционален или стъпков двигател. Ъгълът на завъртане на неговата ос е пропорционален на стойността на управляващия сигнал и времето. При размитите контролери, когато формулира размити правила, експертът може да формулира зависимостта на управляващата променлива от стойността на производната, но не може да формулира зависимостта от интегралната стойност, тъй като интегралът „помни“ цялата история на промяната на грешката, която човек не може да си спомни. Инкременталната форма на PID регулатора се получава чрез диференциране на уравнение (25): За да се получи грешка при нулево управление, трябва да се инсталира интегратор на изхода на инкременталния контролер (Фигура 20): Фигура 20 - Инкрементална форма на PID контролера Преминавайки получените изрази към крайни разлики, получаваме дискретната форма на инкременталния PID регулатор: където Dui+1 = ui+1 - ui; Dei = ei - ei-1. По-стабилно и точно диференциално уравнение може да се получи чрез заместване на изрази за ui+1 и ui от (24) във формулата Dui+1 = ui+1 - ui. Инкременталната форма на контролера е удобна за използване в микроконтролери, тъй като в нея по-голямата част от изчисленията се извършват на стъпки, които могат да бъдат представени с дума с малък брой двоични цифри. За да получите стойността на контролната променлива, можете да извършите кумулативно сумиране на последния етап от изчисленията: ui+1 = ui + Dui+1. Преди да се изчислят параметрите на регулатора, е необходимо да се формулират целта и критериите за качество на регулиране, както и ограниченията върху величината и скоростта на промяна на променливите в системата. Традиционно основните показатели за качество се формулират въз основа на изискванията за формата на реакция на затворена система към стъпкова промяна в зададената точка. Този критерий обаче е много ограничен. По-специално, той не казва нищо за степента на затихване на шума от измерването или влиянието на външни смущения; може да даде погрешна представа за устойчивостта на системата. Следователно, за да се опише напълно или да се тества система с PID регулатор, са необходими редица допълнителни показатели за качество, които ще бъдат разгледани по-късно. В общия случай изборът на показатели за качество не може да бъде напълно формализиран и трябва да се извърши въз основа на смисъла на проблема, който се решава. 3. Нормативно качество 3.1 Критерии за ефективност Отслабване на влиянието на външни смущения Изборът на критерий за качество на управление зависи от целта, за която се използва регулаторът. Целта може да бъде: Поддържане на постоянна стойност на параметър (например температура); Проследяване на зададената точка или софтуерно управление; Управление на клапата в резервоар за течност и др. За конкретна задача най-важният фактор може да бъде: Форма на реакция на външни смущения (време за установяване, превишаване, време за реакция и др.); Форма на отговора на шума от измерването; Форма на отговор на сигнала на заданието; Устойчивост по отношение на разпространението на параметрите на обекта на управление; Спестяване на енергия в контролирана система; Минимизиране на шума от измерването. За класически PID регулатор параметрите, които са най-добри за наблюдение на зададената точка, обикновено са различни от параметрите, които са най-добри за намаляване на влиянието на външни смущения. За да бъдат едновременно оптимални и двата параметъра, е необходимо да се използват PID регулатори с две степени на свобода. Прецизното проследяване на промените в заданието е необходимо в системите за управление на движението, в роботиката; в системи за управление на процеси, където зададената точка обикновено остава непроменена за дълго време, се изисква максимално отслабване на влиянието на товара (външни смущения); в системите за управление на резервоари за течност се изисква да се осигури ламинарен поток (минимизиране на дисперсията на изходната променлива на регулатора) и др. Както е показано в подраздела, обратната връзка отслабва влиянието на външните смущения в |S(jш)| пъти, с изключение на тези честоти, при които |S(jw)|. Външни смущения могат да бъдат приложени към обект в много различни части от него, но когато конкретното местоположение е неизвестно, се счита, че смущението действа върху входа на обекта. В този случай реакцията на системата към външни смущения се определя от трансферната функция от входа на външните смущения към изхода на системата: Тъй като външните смущения обикновено се намират в нискочестотната част на спектъра, където |S(jш)| и, следователно, T, тогава изразът (28) може да бъде опростен: По този начин, за да се отслаби влиянието на външните смущения (по-специално влиянието на товара), може да се намали интеграционната константа Ti. Във времевата област отговорът на външни смущения се оценява от отговора на единичен скок d(t). Намаляване на ефекта от шума при измерване: Трансферната функция от точката на прилагане на шума към изхода на системата е: Поради намаляването на честотната характеристика на обекта с високи честотифункцията на чувствителността клони към 1 (Фигура 18). Следователно е невъзможно да се намали ефектът от шума от измерването чрез обратна връзка. Тези шумове обаче лесно се елиминират чрез използването на нискочестотни филтри и подходящо екраниране и заземяване. Затворената система остава стабилна, когато параметрите на обекта се променят със стойността на DP(jw), ако е изпълнено условие (18). Критерии за качество във времевата област. За да се оцени качеството на регулиране в затворена система с PID контролер, обикновено се използват поетапно входно действие и редица критерии за описание на формата на преходния процес (Фигура 21): Максимална грешка при управление и времето Tmax, в което грешката достига този максимум; Интегрирана абсолютна грешка Интеграл на квадратната грешка Декремент d (това е отношението на първия максимум към втория, типична стойност d=4 или повече) отбелязваме, че в литературата се срещат и други дефиниции на декремента на затихване, по-специално като или като b/a коефициент в експонентата на степента, описваща обвивката на затихналите трептения; Статична грешка e0 (това е постоянна грешка в равновесието, т.е. в постоянен или статичен режим на системата); Време на установяване Te с дадена грешка es (това е времето, след което грешката на управлението не надвишава зададената стойност es; обикновено es = 1%, по-рядко 2% или 5% - съответно времето за установяване се обозначава с T0. 01, T0.02, T0.05); Превишаване emax (това е превишението на първия пик над стойността на стационарното състояние на променливата, обикновено изразено като процент от стойността на стационарното състояние); Време на нарастване Tr (това е интервалът от време, през който изходната променлива нараства от 10 до 90% от стойността си в стабилно състояние); Периодът на затихналите трептения Tcl (строго погледнато, затихналите трептения не са периодични, следователно тук периодът се разбира като разстоянието между два съседни максимума на преходната характеристика). Фигура 21 - Критерии за качество на регулиране във времевата област За системите за управление на движението функцията за рампа се използва по-често като тестов сигнал, отколкото функцията за скок, тъй като електромеханичните системи обикновено имат ограничена скорост на нарастване на изходната стойност. Горепосочените критерии се използват за оценка на качеството на отговора както на промените в зададената стойност, така и на въздействието на външни смущения и шум от измерване. Критерии за качество на честотата. В честотната област обикновено се използват следните критерии, получени от графиката на амплитудно-честотната характеристика на затворена система y (u) (Фигура 22): Ширина на честотната лента u-3dB (или u0.7) на ниво -3 dB (или на ниво 1/ = 0.7) - честотна лента от 0 до u-3dB = u0.7, в рамките на която кривата на честотната характеристика намалява с нула повече от 3 dB спрямо стойността му при нулева честота y(0); Осцилация M - съотношението на максималната (пикова) стойност на честотната характеристика ymax към нейната стойност при нулева честота y(0), т.е. в стабилно състояние типичните стойности са M = 1,5...1,6; Резонансната честота на системата wp е честотата, при която честотната характеристика достига своя максимум ymax = y(wp). Честотните критерии на реалните регулатори не могат да бъдат еднозначно свързани с времевите критерии поради нелинейности (обикновено това са нелинейности от “ограничаващ” тип) и алгоритми за елиминиране на интегралния ефект на насищане. Въпреки това е приблизително възможно да се установят следните връзки между критериите в честотната и времевата област: Честотата на максималната трансферна характеристика на затворена система приблизително съответства на периода на затихнали колебания на отговора на стъпковия вход - h; Колкото по-бавно затихват вибрациите, толкова по-голям е осцилаторният индекс М. Избор на параметри на контролера. AT обща теория автоматично управлениеструктурата на контролера се избира въз основа на модела на обекта за управление. В този случай по-сложните управляващи обекти съответстват на по-сложните контролери. В нашия случай структурата на контролера вече е зададена - обмисляме PID контролер. Тази структура е много проста, така че PID контролерът не винаги може да даде добро качествоуправление, въпреки че PID контролерите се използват в по-голямата част от индустриалните приложения. Видове и приложение на сензори автоматично управлениережимни параметри на технологичните процеси химическо производство. Принципът на действие на измервателните сензори, терморегулаторите, модулните ключове. Средства за защита на електрически инсталации. дисертация, добавена на 26.04.2014 г Запознаване с етапите на изчисляване на настройките на типичните регулатори в едноконтурна система за автоматично реагиране. Характеристики на избора на типа промишлен регулатор. Методи за конструиране на област на устойчивост в равнината на параметрите за настройка на регулатора. дисертация, добавена на 17.06.2013 г Анализ на свойствата на обекта на управление, типични регулатори и избор на тип регулатор. Изчисляване на оптимални параметри на настройките на контролера. Зависимост на регулиращото въздействие от отклонението на контролираната величина. Интегрални и пропорционални регулатори. курсова работа, добавена на 11.02.2014 г Проектиране на устройство за измерване на температурата в помещението. Изборът на температурен сензор, микроконтролер и платка за отстраняване на грешки. Проучване на работата на вградения температурен датчик. Разработване на софтуер. Функционална организация на програмата. курсова работа, добавена на 26.12.2013 г Проектиране на модел на електродвигател с изчислени параметри в среда Simulink. Симулация на работа на двигателя с различни натоварвания (смущаващ въртящ момент). Изчисляване на параметри и оптимални регулатори и качествени показатели за редица характеристики. курсова работа, добавена на 24.06.2012 г Изчисляване на комплексната честотна характеристика на обекта в необходимия честотен диапазон. Определяне на границата на стабилност на затворен автоматична системарегулиране. Оценка на качеството на управление при използване на PI и PID регулатори и избор на най-добрия. курсова работа, добавена на 12.04.2014 г Ускорителна характеристика на обекта на регулиране и определяне на параметри, характеризиращи инерционните свойства на обекта. Изчисляване на настройките на регулаторите по амплитудно-фазовата характеристика на регулирания обект. Изчисляване на показателите за качество на ATS. курсова работа, добавена на 22.10.2012 г Синтез на пропорционално-интегрално-диференциален регулатор, който осигурява показатели за точност и качество на управление на затворена система. Амплитудно-честотна характеристика, динамичен анализи преходния процес на коригираната система. курсова работа, добавена на 08/06/2013 Изчисляване на параметрите за настройка на PI-регулатор за обект от втори ред. Аналитично изчисляване и внедряване на програмата в среда MatLab, която определя параметрите на регулатора и преходния процес. Критерии за качество на преходния процес на затворена система. лабораторна работа, добавена на 29.09.2016 г Класификация на електромагнитни окачвания. Изграждане на математически модел на щанда. Програмна реализация на пропорционално-интегрално-диференциален регулатор. Описание на микроконтролера ATmega 328 и платката Arduino. Монтаж и пускане в експлоатация на щанда. PID контролерът е най-простият контролер, който има ефективни аналогови хардуерни реализации и следователно е най-широко използваният. За работата си изисква задаване на 3 коефициента за конкретен обект, което ви позволява да изберете процеса на регулиране според изискванията. Имайки просто физическо значение и проста математическа нотация, той се използва широко и често в регулатори на температурата, регулатори на газовия поток и други системи, където се изисква да се поддържа определен параметър на дадено ниво, с възможни преходимежду различни предварително зададени нива. Разбира се, има по-сложни контролери, които ви позволяват да достигнете зададените параметри по-точно и бързо и с по-малко превишаване, както и като вземете предвид нелинейността или хистерезиса на контролирания обект, но те имат по-голяма изчислителна сложност и са по-трудни нагласям. Въпреки своята простота както на физическото значение, така и на математическата нотация: При софтуерната реализация на PID контролера често се допускат грешки, които се случват дори в проверени устройства за автоматизация. Освен това е изключително лесно да се провери качеството на изпълнение на PID регулатора. Обмисли най-простият пример: термостат. За да се тества качеството му, най-подходящ е бърз обект с ниска инерция и ниска мощност. Класика в жанра: обикновена крушка от 100 W със завинтена към нея тънка термодвойка (XA). И първото нещо, което трябва да проверите на PID контролера, е деградацията на PID до просто P-регулатор. Тоест задаваме интегралния и диференциалния коефициент на нула и задаваме пропорционалния на максимума. Включваме регулатора, проверяваме: текущата температура е 22 градуса, настройката е 16 градуса. Лампата не свети. Започваме да започваме да увеличаваме настройката: 16.1, 16.3, 16.7, 18 ... 19 ... светлината свети. Как?! Където?! Спираме - изключваме. И така се запознахме първа класическа грешкавнедряване на PID контролера. Малко математическо отклонение: нека си припомним отново интегралната нотация, посочена по-горе. Ние го прилагаме програмно, което означава дискретно. Тоест със завидна редовност измерваме входната стойност, сравняваме я със зададената, изчисляваме ефекта, издаваме, повтаряме. Така че е необходимо да се премине от интегралната форма към схемата с крайни разлики. При преход обикновено се използва челен преход: Използването на директна формула ще изисква, първо, да се изчисли и съхрани интегралът на несъответствията за голям период от време, и второ, ще изисква високопрецизна работа с плаваща запетая (тъй като интегралният коефициент Ki винаги е< 1), либо операции деления (представляя коэффициент в форме 1/Ki) большой разрядности. Всё это требует вычислительных ресурсов, коих в embedded как правило сильно ограничено… Поэтому, вместо реализации прямой схемы, реализуют рекуррентную формулу: И така, обратно към нашия регулатор. И така, има регулируем обект: електрическа крушка. За да се контролира захранването, подавано към него, се използва прост подход: захранването (220V 50Hz) се подава през триака към товара. Симисторът се изключва в момента, в който полувълната премине през нула, и остава изключен, докато не бъде подаден сигнал към управляващия електрод. Така, колкото по-рано след началото на полувълната подадем управляващ сигнал, толкова повече енергия от тази полувълна ще достигне до контролирания обект. Чрез правилно синхронизиране на линейността на областта на полувълната от времето X до края на полувълната, ние сме в състояние да изведем мощност от 0 до 100% с точността, с която изчислихме таблицата за линеаризация. Така че можем да изведем мощност от 0 до 100%. В реални обекти често е невъзможно да се даде 100% от мощността - например, това е изпълнено с изгаряне на нагревателния елемент. Следователно всички устройства имат настройка за минимална и максимална изходна мощност на обект. И така, след изчисляване на U(n) съгласно горната формула, се добавя още едно ограничение на резултата: Причината е банална: в момента на прехода от дискретна към схема с крайни разлики ние „слагаме в скоби“ операцията по изчисляване на интеграла и на всяка стъпка добавяме производната към натрупаната сума U(n-1). След като му наложихме ограничение, ние всъщност анулираме целия изчислен интеграл. (Е, не колко нулираме, колко довеждаме до диапазона 0-100, което в случая не е важно). Така диференцираме PID регулатора, а диференциалния ускорител остава. Това, което всъщност изглежда като обикновен диференциален регулатор - мощността се подава пропорционално на промяната в зададената точка или контролираната променлива, а не пропорционално на разликата между зададената точка и контролираната променлива. Заключение #1: Изчисляването на U(n) не може да бъде ограничено. За да ограничите мощността, подавана към изходното устройство, трябва да се зададе отделна променлива. Сега, след като имаме Urn, за ограничена мощност, качваме отново, продължаваме да тестваме. Докато чакаме и бавно осъзнаваме, че явно сме попаднали на някои „Класическа става №2“™ крушката бавно пламва, отива на 100% мощност и остава така - не може да даде 600 градуса. Връщаме се отново към нашата разностна схема. U(n) = U(n-1) + Kp*(dE + ...) . Към текущата изчислена стойност на въздействието се добавя остатъчната разлика, умножена по коефициента на пропорционалност. Имахме задание 60, температура 60, тоест нулево несъответствие. Изходната мощност също беше нула. И тогава изведнъж, внезапно, зададената точка беше увеличена до 600 градуса. несъответствието рязко стана 540 градуса, те също го умножиха по коефициента на пропорционалност ... и излетяха от капацитета за съхранение на U (n). Не се смейте, като използвате математика с фиксирана запетая вместо с плаваща запетая. С разлика от 540 градуса и работа през 1/16, с коефициент на пропорционалност 20, получаваме ... 540 * 20 * 16 = 172800 и ако имаме 16-битов U (n) и дори знак едно, тогава всъщност в резултат на изчислението получихме A300h = -8960. Опачки. Вместо голям плюс - осезаем такъв минус. Заключение #2: Изчисленията трябва да се правят с правилна опора за преливане. Препълнено? Ограничете ограничението на броя, със сигурност не увивайте. И така, увеличихме битовата дълбочина U (n), преведохме, зашихме, стартирахме. Крушката още не е изстинала напълно, там е 80 градуса, настройката е същата 600. Крушката светва ... и угасва. Светва и гасне. Как така? Настройката е 600, крушката е 80 - и поддържа собствените си 80 доста добре! Как е това?! Очевидно се измъкнахме Грешка #3. И отново едно лирико-математическо отклонение. И така, това е нашата разностна схема: U(n) = G(U(n-1), dE(n)) . Още веднъж: новата стойност на въздействието е сумата от миналото въздействие и определено въздействие, в зависимост от разликата между остатъчното в текущия момент и предишното. Какъв е предишният момент? И какъв е предишният момент от предишния? Е, спомнете си училището. Доказателство по индукция. Ако е възможно да се конструира доказателство за K+1, като се приеме, че доказателството за K е правилно, Идокажете отделно какво е вярно за K=0, тогава доказателството е вярно. И така, как да изчислим U(0)? Често срещано решение: нулирайте всичко, прочетете зададената точка от флаш паметта и зададените точки, изчакайте 1 цикъл на запитване и прочетете X(0). Ето, нулата е готова, сега работим. И... И не правилно. Защо? Тъй като повтарящата се формула се отблъсква от промените в остатъка. И след като инициализирахме с нула и заредихме текущите стойности, загубихме началните условия. Това е всичко - вместо да поддържа абсолютната стойност на температурата на ниво, равно на абсолютната зададена точка, контролерът започва да поддържа температурата равна на началната температура плюс разликата в зададената точка. Тоест беше 80 градуса и настройката беше 200, включих устройството - държи 80. Промених настройката на 240 - започна да държи 120. Правилно инициализиране на схемата за разлика: задайте _всичко_ на нула. Това е Заключение #3: правилно инициализиране на стартовите условия. правилно ли е Е, добре, добре ... Още веднъж ... Задаваме настройката на 20. Чакаме охлаждане ... Изключваме го. Включи. И така, красота: ток 20, зададена точка 20. Задайте скок 600. Да се стоплим. 100, 120 ... задайте настройката на 20. Изключи се, отиде да се охлади. Изчакваме малко (120… 110… 100… 90… 80…) и задаваме настройката на 100. Да се затоплим… 105 градуса, изключено. Спри се. И защо държи 105? При нас сега работи само пропорционалният компонент. При правилно изпълнение от физическия смисъл на процеса, осцилаторният процес не може да поддържа настройката по-висока от зададената. строго по-долу. И държи 5 градуса повече от зададеното. Спазва се Шега #4. И така, нека си спомним какво имахме по-горе: Заключение №2: U(n) не може да бъде ограничено. И извод No3: при преливане пак трябва да ограничите. Да да. В противен случай "работната точка" се измества за ограничен момент. Какво да правя? Повишаване на ранга? Е, ако има достатъчно изчислителна мощност. Необходимо ли е? Всъщност какво лошо има в това U(n) = 9999,99, а не 29999,99? Общо взето, само че загубихме 20 000. Но сега, за да работим, просто трябва да свалим 100% от мощността така или иначе, нали? Правилно. Това означава, че няма проблем с ограничението в полка, стига да не се отдалечаваме от лимита. По този начин, в случай на препълване, трябва да се зададе флаг и при достигане например на половината от обхвата (т.е. когато U (n) след 9999.9 падне под 5000.00), отново да се инициализира веригата. Тоест, изхвърлете историята, кажете, че n=0 и вижте Заключение № 3 по-горе. Един любознателен ум вече е разбрал, че в случая пълна схема, когато и трите компонента не са равни на нула, нулирайки итеративния процес в процеса, ние също нулираме натрупания интеграл на интегралния компонент. Въпреки това, поради факта, че нулираме много предварително, той ще има време да се натрупа по време на допълнителното производство на остатъка. И не е съвсем правилно да се натрупва интеграл на „големи“ етапи, тъй като целта на интегралния компонент е да „избере“ несъответствието, което пропорционалният компонент не може да изработи отделно. Заключение #4: ако по някаква причина U(n) е ограничено, веригата трябва да се инициализира отново, веднага щом веригата се върне към нормалното. В следващия бр: необходимо ли е да се прилага схема за разлика? Детайлно изпълнение на директна дискретна схема с прости и разбираеми регулируеми коефициенти, с пряк физически смисъл, който лесно изчислява управляващото действие при честота от 25Hz на процесор ADuC847 (бърз 8-битов контролер, с ядро 8051), оставяйки много процесорно време за други процеси. (Снимките, изобразяващи формули, са взети от статиятаИзпратете добрата си работа в базата знания е лесно. Използвайте формата по-долу
Подобни документи
където E(n) = X(n) - X0(n) - това е големината на несъответствието между текущата и зададената стойност на контролирания параметър.
използването на рекурсивна формула дава възможност да се намали количеството на изчисленията и битовата дълбочина на междинните стойности.
ако Un< Umin then Un:= Umin; if Un>Umax след това Un:= Umax;
След това изчислената Un е необходимата изходна мощност в текущия момент. Та-дам! Именно тази реализация създава описаната по-горе грешка.
Включваме регулатора, проверяваме: текущата температура е 22 градуса, настройката е 16 градуса. Лампата не свети.
Започваме да добавяме настройката: 16.1, 16.4, 17, 18, 20, 22, 24 (опа! светна! ура!), 28, 30, 40, 60 ... Красота! Върши работа!
Гледаме процеса - оказа се около 60, увисва малко напред-назад, но държи. Изглежда всичко е красиво. Издишваме, проверяваме управлението от компютъра: задаваме 600 градуса. И... Лампата изгасва. Как така? Настройка 600, текуща 60, но лампичката не свети?
X(0) = 0, X0(0) = 0. U(0) = 0. E(0)=X(0)-X0(0)=0.
И в първия цикъл на изчисления зададената точка и текущата стойност, така да се каже, се появяват внезапно:
X(1) = 80. X0(1)=200. U(1) = U(0)+Kp*(E(1)-E(0)) = U(0)+Kp*(X(1)-X0(1)-E(0)) = 0 + 20*(200 - 80 - 0) = 2400
Сега веригата работи правилно.
Съветваме ви да прочетете
 Психологически характеристики на децата в юношеска възраст
Психологически характеристики на децата в юношеска възраст Преместване на дете в друго училище - процедурата и необходимите документи Дали да се премести дете в друго училище
Преместване на дете в друго училище - процедурата и необходимите документи Дали да се премести дете в друго училище, диагноза, лечение. Лечение на урогенитална хламидия") Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение. Лечение на урогенитална хламидия
Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение. Лечение на урогенитална хламидия Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво
Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво

