หลักการทำงานของมอเตอร์ไฟฟ้า
มอเตอร์ไฟฟ้า – เป็นเพียงอุปกรณ์สำหรับการแปลงที่มีประสิทธิภาพ พลังงานไฟฟ้าเป็นเครื่องกล
การเปลี่ยนแปลงนี้มีพื้นฐานมาจากสนามแม่เหล็ก มอเตอร์ไฟฟ้าใช้แม่เหล็กถาวรและแม่เหล็กไฟฟ้า และใช้คุณสมบัติทางแม่เหล็กของวัสดุต่างๆ เพื่อสร้างอุปกรณ์ที่น่าทึ่งเหล่านี้
มอเตอร์ไฟฟ้ามีหลายประเภท เราสังเกตสองคลาสหลัก: AC และ DC
มอเตอร์ไฟฟ้ากระแสสลับ (กระแสสลับ) ต้องการแหล่งพลังงานในการทำงาน กระแสสลับหรือแรงดันไฟ (คุณสามารถหาแหล่งดังกล่าวในใด ๆ เต้ารับไฟฟ้าในบ้าน).
มอเตอร์ไฟฟ้าของคลาส DC (กระแสตรง) ต้องใช้แหล่งจ่ายกระแสตรงหรือแรงดันไฟในการทำงาน (คุณสามารถหาแหล่งจ่ายดังกล่าวในแบตเตอรี่ใดก็ได้)
ยูนิเวอร์แซลมอเตอร์สามารถใช้งานได้จากแหล่งใด ๆ
ไม่เพียงแต่การออกแบบของมอเตอร์จะแตกต่างกันเท่านั้น แต่วิธีการควบคุมความเร็วและแรงบิดก็ต่างกันด้วย แม้ว่าหลักการของการแปลงพลังงานจะเหมือนกันในทุกประเภท
อุปกรณ์และหลักการทำงานของมอเตอร์ไฟฟ้าที่ง่ายที่สุด
การออกแบบมอเตอร์ไฟฟ้าขึ้นอยู่กับผลกระทบที่ Michael Faraday ค้นพบในปี พ.ศ. 2364 ว่าปฏิกิริยาของกระแสไฟฟ้าและแม่เหล็กสามารถทำให้เกิดการหมุนอย่างต่อเนื่อง หนึ่งในเครื่องยนต์แรกๆ ที่พบว่าใช้งานได้จริงคือเครื่องยนต์ของ Boris Semenovich Jacobi (1801–1874) ซึ่งวางเรือลำหนึ่งซึ่งมีผู้โดยสาร 12 คนอยู่บนเรือ อย่างไรก็ตามสำหรับการใช้มอเตอร์ไฟฟ้าอย่างแพร่หลายจำเป็นต้องมีแหล่งไฟฟ้าราคาถูก - เครื่องกำเนิดแม่เหล็กไฟฟ้า
หลักการทำงานของมอเตอร์ไฟฟ้านั้นง่ายมาก: การหมุนเกิดจากการดึงดูดของแม่เหล็กและแรงผลักที่กระทำระหว่างขั้วของแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้ (โรเตอร์) กับเสาที่สอดคล้องกันของภายนอก สนามแม่เหล็กสร้างโดยแม่เหล็กไฟฟ้าคงที่ (หรือแม่เหล็กถาวร) - สเตเตอร์
ส่วนที่หมุนของเครื่องไฟฟ้าเรียกว่าโรเตอร์ (หรืออาร์มาเจอร์) และส่วนที่อยู่กับที่เรียกว่าสเตเตอร์ ในมอเตอร์กระแสตรงแบบธรรมดา คอยล์ยูนิตทำหน้าที่เป็นโรเตอร์และแม่เหล็กถาวรทำหน้าที่เป็นสเตเตอร์
ความยากอยู่ที่การทำให้เครื่องยนต์หมุนได้อย่างต่อเนื่อง และสำหรับสิ่งนี้จำเป็นต้องตรวจสอบให้แน่ใจว่าขั้วของแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้ซึ่งดึงดูดไปยังขั้วตรงข้ามของสเตเตอร์จะเปลี่ยนเป็นขั้วตรงข้ามโดยอัตโนมัติ - จากนั้นโรเตอร์จะไม่หยุดนิ่ง แต่จะหมุนต่อไป - โดยความเฉื่อยและ ภายใต้การกระทำของแรงผลักที่เกิดขึ้นในขณะนั้น
ตัวสะสมใช้สำหรับเปลี่ยนเสาโรเตอร์โดยอัตโนมัติ เป็นเพลตคู่หนึ่งจับจ้องอยู่ที่เพลาโรเตอร์ซึ่งต่อกับขดลวดของโรเตอร์ กระแสไฟฟ้าถูกส่งไปยังเพลตเหล่านี้ผ่านหน้าสัมผัสที่รวบรวมกระแส (แปรง) เมื่อโรเตอร์หมุน 180° แผ่นเพลตจะเปลี่ยนตำแหน่ง ซึ่งจะเปลี่ยนทิศทางของกระแสโดยอัตโนมัติและส่งผลให้ขั้วของแม่เหล็กไฟฟ้าเคลื่อนที่ได้ เนื่องจากขั้วแม่เหล็กจะผลักกัน ขดลวดจึงยังคงหมุนต่อไป และขั้วของมันถูกดึงดูดไปยังขั้วที่ตรงกันซึ่งอยู่อีกด้านหนึ่งของแม่เหล็ก
มอเตอร์ไฟฟ้าที่ง่ายที่สุด
มอเตอร์ไฟฟ้าที่ง่ายที่สุดทำงานเฉพาะบน กระแสตรง(จากแบตเตอรี่) กระแสไหลผ่านห่วงที่อยู่ระหว่างขั้วของแม่เหล็กถาวร ปฏิสัมพันธ์ของสนามแม่เหล็กของเฟรมกับกระแสและแม่เหล็กทำให้เฟรมหมุน หลังจากการเลี้ยวแต่ละครั้ง นักสะสมจะเปลี่ยนหน้าสัมผัสของเฟรม ซึ่งเหมาะกับแบตเตอรี่ ดังนั้นเฟรมจะหมุน
ในมอเตอร์บางตัว ใช้แม่เหล็กไฟฟ้าแทนแม่เหล็กถาวรเพื่อสร้างสนามแม่เหล็ก ขดลวดของแม่เหล็กไฟฟ้าดังกล่าวเรียกว่าขดลวดกระตุ้น
มอเตอร์ไฟฟ้าถูกใช้ทุกที่ แม้แต่ที่บ้าน คุณสามารถหามอเตอร์ไฟฟ้าจำนวนมากได้ มอเตอร์ไฟฟ้าใช้ในนาฬิกา ในพัดลม เตาอบไมโครเวฟ, ใน เครื่องซักผ้าในพัดลมคอมพิวเตอร์ ในเครื่องปรับอากาศ ในเครื่องคั้นน้ำผลไม้ ฯลฯ ฯลฯ มอเตอร์ไฟฟ้าที่ใช้ในอุตสาหกรรมสามารถระบุได้ไม่สิ้นสุด ขนาดทางกายภาพมีตั้งแต่ขนาดของหัวไม้ขีดไปจนถึงขนาดของเครื่องยนต์หัวรถจักร
มอเตอร์ไฟฟ้าอุตสาหกรรมที่แสดงด้านล่างทำงานได้ทั้งกระแสตรงและกระแสสลับ สเตเตอร์ของมันคือแม่เหล็กไฟฟ้าที่สร้างสนามแม่เหล็ก ขดลวดของมอเตอร์เชื่อมต่อผ่านแปรงไปยังแหล่งพลังงาน พวกเขาหมุนโรเตอร์เป็นมุมเล็กๆ ทีละตัว และโรเตอร์จะหมุนอย่างต่อเนื่อง

เครื่องมือวัดทางไฟฟ้า
เครื่องมือวัดไฟฟ้า -ประเภทของอุปกรณ์ที่ใช้วัดปริมาณไฟฟ้าต่างๆ
กลุ่มอุปกรณ์แม่เหล็กไฟฟ้ามีอยู่ทั่วไปมากที่สุด หลักการทำงานซึ่งใช้ครั้งแรกโดย F. Kohlrausch ในปี พ.ศ. 2427 ขึ้นอยู่กับการเคลื่อนที่ของชิ้นส่วนเหล็กที่เคลื่อนที่ได้ภายใต้อิทธิพลของฟลักซ์แม่เหล็กที่สร้างขึ้นโดยขดลวดซึ่งผ่านกระแส การนำหลักการนี้ไปปฏิบัติจริงนั้นมีความหลากหลาย
การกระทำการปรับทิศทางของสนามแม่เหล็กบนวงจรที่มีกระแสใช้ในเครื่องมือวัดทางไฟฟ้าของระบบแมกนีโตอิเล็กทริก - แอมมิเตอร์ โวลต์มิเตอร์ ฯลฯ
อุปกรณ์ของอุปกรณ์ระบบแม่เหล็ก
อุปกรณ์วัดของระบบแมกนีโตอิเล็กทริกจัดเรียงดังนี้
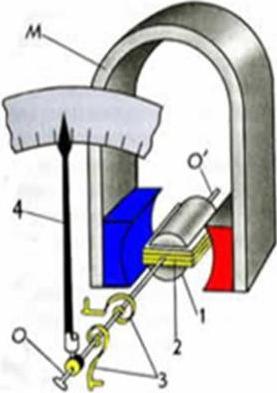
พวกเขานำโครงอลูมิเนียมน้ำหนักเบา 2 อันเป็นรูปสี่เหลี่ยมผืนผ้ามาพันด้วยลวดเส้นเล็ก ๆ เฟรมถูกติดตั้งบนสองแกน O และ O "ซึ่งติดลูกศรของอุปกรณ์ 4 ไว้ด้วย แกนนั้นยึดด้วยสปริงเกลียวบาง ๆ สองตัว 3. แรงยืดหยุ่นของสปริงทำให้เฟรมกลับสู่สมดุล ตำแหน่งในกรณีที่ไม่มีกระแสจะถูกเลือกเพื่อให้เป็นสัดส่วนกับมุมเบี่ยงเบนของลูกศรจากความสมดุลของตำแหน่งขดลวดจะถูกวางไว้ระหว่างขั้วของแม่เหล็กถาวร M พร้อมปลายรูปทรงของทรงกระบอกกลวงด้านใน ขดลวดเป็นทรงกระบอกเหล็กอ่อน 1.การออกแบบนี้ให้ทิศทางรัศมีของเส้นเหนี่ยวนำแม่เหล็กในบริเวณที่เกิดการหมุนของขดลวด (ดูรูป)

เป็นผลให้ที่ตำแหน่งใด ๆ ของขดลวด แรงที่กระทำต่อมันจากด้านข้างของสนามแม่เหล็กมีค่าสูงสุดและที่ความแรงของกระแสคงที่จะคงที่ เวกเตอร์ F และ -F แสดงถึงแรงที่กระทำต่อขดลวดจากสนามแม่เหล็กและหมุนมัน ขดลวดที่มีกระแสจะหมุนจนกว่าแรงยืดหยุ่นจากด้านข้างของสปริงจะปรับสมดุลแรงที่กระทำบนเฟรมจากด้านข้างของสนามแม่เหล็ก โดยการเพิ่มกำลังกระแสในเฟรม 2 เท่า เฟรมจะหมุนผ่านมุมที่ใหญ่เป็นสองเท่า ทั้งนี้เป็นเพราะ F m ~I.
แรงที่กระทำต่อเฟรมด้วยกระแสจะเป็นสัดส่วนโดยตรงกับความแรงของกระแส กล่าวคือ คุณสามารถวัดความแรงของกระแสในเฟรมได้โดยการปรับเทียบอุปกรณ์
ในทำนองเดียวกันคุณสามารถตั้งค่าให้อุปกรณ์วัดแรงดันไฟฟ้าในวงจรได้หากคุณปรับมาตราส่วนเป็นโวลต์และต้องเลือกความต้านทานของลูปกับกระแสให้มากเมื่อเทียบกับความต้านทานของวงจรที่เรา วัดแรงดันไฟฟ้า
การทำงานของมอเตอร์ไฟฟ้าและเครื่องยนต์สันดาปภายใน
เครื่องยนต์สันดาปภายใน
วันนี้เราไม่สามารถทำได้หากไม่มีรถยนต์ อย่างไรก็ตามพวกเขาทั้งหมดแตกต่างกัน รูปร่างขนาดและกำลัง แต่หลักการทำงานของเครื่องยนต์นั้นโดยพื้นฐานแล้วเหมือนกัน วันนี้เราจะพูดถึงการทำงานของเครื่องยนต์ ท้ายที่สุดอาจมีหลายคนสนใจหลักการทำงานของมัน เครื่องยนต์เป็นกลไกที่ซับซ้อน แต่เราจะเข้าใจองค์ประกอบหลักและองค์ประกอบหลัก
เครื่องยนต์มีสองประเภทหลัก: สองจังหวะและสี่จังหวะ ในเครื่องยนต์สองจังหวะ รอบการทำงานทั้งหมด (กระบวนการของการบริโภคส่วนผสมเชื้อเพลิง ไอเสียก๊าซ การล้าง) เกิดขึ้นระหว่างการหมุนเพลาข้อเหวี่ยงหนึ่งครั้งในสองรอบหลัก เครื่องยนต์ประเภทนี้ไม่มีวาล์ว (เช่นเดียวกับในเครื่องยนต์สันดาปภายในสี่จังหวะ) บทบาทของลูกสูบนั้นเล่นโดยลูกสูบซึ่งเมื่อเคลื่อนที่จะปิดทางเข้าออกและหน้าต่างล้าง ดังนั้นจึงง่ายกว่าในการออกแบบ
พลังของเครื่องยนต์สองจังหวะที่มีขนาดกระบอกสูบและความเร็วของเพลาเท่ากันในทางทฤษฎีนั้นเป็นสองเท่าของเครื่องยนต์สี่จังหวะเนื่องจากรอบการทำงานจำนวนมากขึ้น อย่างไรก็ตาม การใช้จังหวะลูกสูบที่ไม่สมบูรณ์เพื่อการขยายตัว การปลดปล่อยกระบอกสูบจากก๊าซตกค้างที่แย่ที่สุด และค่าใช้จ่ายส่วนหนึ่งของพลังงานที่สร้างขึ้นสำหรับการเป่าทำให้กำลังเพิ่มขึ้นเพียง 60–70%
ดังนั้น ให้พิจารณาการออกแบบเครื่องยนต์สันดาปภายในแบบสองจังหวะ ดังแสดงในรูปที่ 1:
เครื่องยนต์ประกอบด้วยข้อเหวี่ยงซึ่งเพลาข้อเหวี่ยงและกระบอกสูบติดตั้งอยู่บนตลับลูกปืนทั้งสองด้าน ลูกสูบเคลื่อนที่ภายในกระบอกสูบ - ถ้วยโลหะล้อมรอบด้วยวงแหวนสปริง (วงแหวนลูกสูบ) ที่ฝังอยู่ในร่องบนลูกสูบ แหวนลูกสูบไม่อนุญาตให้ก๊าซที่เกิดขึ้นระหว่างการเผาไหม้เชื้อเพลิงผ่านระหว่างลูกสูบกับผนังกระบอกสูบ ลูกสูบติดตั้งแท่งโลหะ - พินซึ่งเชื่อมต่อลูกสูบกับก้านสูบ ก้านสูบส่งการเคลื่อนที่แบบลูกสูบเชิงเส้นของลูกสูบไปสู่การเคลื่อนที่แบบหมุนของเพลาข้อเหวี่ยง นอกจากนี้ โดยเฉพาะอย่างยิ่งบนสกู๊ตเตอร์ การเคลื่อนที่แบบหมุนจะถูกส่งไปยังเครื่องแปรผัน
การหล่อลื่นพื้นผิวเสียดทานและแบริ่งภายในเครื่องยนต์สองจังหวะเกิดขึ้นโดยใช้ส่วนผสมของเชื้อเพลิงซึ่งผสมน้ำมันตามปริมาณที่ต้องการ รูปที่ 1 แสดงว่าส่วนผสมของเชื้อเพลิง (สีเหลือง) เข้าสู่ทั้งห้องข้อเหวี่ยงของเครื่องยนต์ (นี่คือช่องที่เพลาข้อเหวี่ยงได้รับการแก้ไขและหมุน) และกระบอกสูบ ไม่มีการหล่อลื่นทุกที่ และถ้ามี ก็จะถูกชะล้างออกด้วยส่วนผสมของเชื้อเพลิง ด้วยเหตุนี้น้ำมันจึงถูกเติมเข้าไปในสัดส่วนที่แน่นอนของน้ำมันเบนซิน ประเภทของน้ำมันที่ใช้เป็นแบบพิเศษสำหรับเครื่องยนต์สองจังหวะโดยเฉพาะ มันจะต้องทนต่ออุณหภูมิสูงและเมื่อเผาด้วยเชื้อเพลิงให้ทิ้งขี้เถ้าไว้ขั้นต่ำ ตอนนี้เกี่ยวกับหลักการทำงาน รอบการทำงานทั้งหมดในเครื่องยนต์ดำเนินการในสองรอบ
1. จังหวะการบีบอัด ลูกสูบเคลื่อนจากจุดศูนย์กลางตายด้านล่างของลูกสูบ (ในตำแหน่งนี้ ลูกสูบอยู่ในรูปที่ 2 ซึ่งต่อไปนี้จะเรียกว่า BDC โดยย่อ) ไปยังจุดศูนย์กลางตายบนของลูกสูบ (ตำแหน่งลูกสูบในรูปที่ 3 ซึ่งต่อไปนี้จะเรียกว่า TDC) ขั้นแรกให้ปิดกั้นการล้าง 2 จากนั้นจึงปิดหน้าต่างเต้าเสียบ 3 หลังจากที่ลูกสูบปิดหน้าต่างทางออกในกระบอกสูบ การบีบอัดของส่วนผสมที่ติดไฟได้ซึ่งเคยเข้าไปก่อนหน้านี้จะเริ่มต้นขึ้น ในเวลาเดียวกันในห้องข้อเหวี่ยง 1 เนื่องจากความหนาแน่นและหลังจากที่ลูกสูบปิดหน้าต่างล้าง 2 สูญญากาศจะถูกสร้างขึ้นภายใต้ลูกสูบภายใต้การกระทำของส่วนผสมที่ติดไฟได้เข้าสู่ห้องข้อเหวี่ยงจากคาร์บูเรเตอร์ผ่าน หน้าต่างทางเข้าและวาล์วเปิด
2. จังหวะจังหวะ. เมื่อลูกสูบอยู่ใกล้ TDC ส่วนผสมที่ใช้บีบอัด (1 ในรูปที่ 3) จะถูกจุดประกายด้วยไฟฟ้าจากเทียนไข ซึ่งเป็นผลมาจากอุณหภูมิและความดันของก๊าซเพิ่มขึ้นอย่างรวดเร็ว ภายใต้การกระทำของการขยายตัวทางความร้อนของก๊าซ ลูกสูบจะเคลื่อนไปที่ NDC ในขณะที่ก๊าซที่ขยายตัวจะทำงานอย่างมีประโยชน์ ในขณะเดียวกัน เมื่อลงไป ลูกสูบก็สร้าง ความดันสูงในห้องข้อเหวี่ยง (บีบอัดส่วนผสมอากาศและเชื้อเพลิงในนั้น) ภายใต้แรงดัน วาล์วจะปิด จึงป้องกันไม่ให้ส่วนผสมที่ติดไฟได้กลับเข้าไปในท่อร่วมไอดีแล้วเข้าไปในคาร์บูเรเตอร์
เมื่อลูกสูบไปถึงหน้าต่างทางออก (1 ในรูปที่ 4) ลูกสูบจะเปิดออกและปล่อยก๊าซไอเสียออกสู่บรรยากาศ ความดันในกระบอกสูบจะลดลง เมื่อเคลื่อนที่ต่อไป ลูกสูบจะเปิดช่องไล่อากาศ (1 ในรูปที่ 5) และส่วนผสมที่ติดไฟได้ซึ่งบีบอัดในห้องข้อเหวี่ยงจะเข้าสู่ช่อง (2 ในรูปที่ 5) เติมกระบอกสูบและขับออกจากก๊าซไอเสียที่ตกค้าง
เป็นมูลค่าการกล่าวขวัญถึงหลักการของการจุดระเบิด เนื่องจากส่วนผสมของเชื้อเพลิงต้องใช้เวลาในการจุดไฟ จึงเกิดประกายไฟขึ้นบนเทียนเล็กน้อยก่อนที่ลูกสูบจะไปถึง TDC ตามหลักการแล้ว ยิ่งลูกสูบเคลื่อนที่เร็วขึ้น การจุดระเบิดก็ควรจะเร็วขึ้น เพราะลูกสูบจากช่วงเวลาที่เกิดประกายไฟจะไปถึง TDC เร็วขึ้น มีอุปกรณ์ทางกลและอิเล็กทรอนิกส์ที่เปลี่ยนมุมจุดระเบิดขึ้นอยู่กับความเร็วของเครื่องยนต์ ในทางปฏิบัติสำหรับสกูตเตอร์ได้ถึง 2000 เป็นต้นไป ไม่มีระบบดังกล่าวและกำหนดเวลาการจุดระเบิดตามความเร็วที่เหมาะสม ในสกู๊ตเตอร์บางรุ่น เช่น Honda Dio ZX AF35 จะมีการติดตั้งสวิตช์อิเล็กทรอนิกส์ที่มีการเลื่อนแบบไดนามิก ด้วยเครื่องยนต์จึงพัฒนากำลังมากขึ้น
ข้อดีของเครื่องยนต์สี่จังหวะ
* ทรัพยากรที่มากขึ้น
* เศรษฐกิจที่ดี
* ไอเสียที่สะอาดขึ้น
* ไม่ต้องใช้ระบบไอเสียที่ซับซ้อน
* เสียงรบกวนน้อยลง * ไม่ต้องผสมน้ำมันล่วงหน้ากับน้ำมันเบนซิน
ข้อดีของเครื่องยนต์สองจังหวะ
* ขาดการหล่อลื่นขนาดใหญ่และระบบจ่ายก๊าซสำหรับตัวเลือกน้ำมันเบนซิน
* กำลังสูงในแง่ของปริมาตรการทำงาน 1 ลิตร
* ง่ายกว่าและถูกกว่าในการผลิต
มอเตอร์ไฟฟ้า
ประวัติความเป็นมาของการสร้าง
ในปี ค.ศ. 1821 ในการศึกษาปฏิสัมพันธ์ของตัวนำกับกระแสและแม่เหล็ก ฟาราเดย์พบว่ากระแสไฟฟ้าที่ไหลผ่านตัวนำสามารถทำให้ตัวนำนี้หมุนรอบแม่เหล็กหรือทำให้แม่เหล็กหมุนรอบตัวนำได้ ประสบการณ์นี้พิสูจน์ให้เห็นถึงความเป็นไปได้ขั้นพื้นฐานในการสร้างมอเตอร์ไฟฟ้า
ความเป็นไปได้ของการแปลงพลังงานไฟฟ้าเป็นพลังงานกลได้แสดงให้เห็นในการทดลองอื่นๆ อีกมากมาย ดังนั้นในหนังสือของ P. Barlow เรื่อง "The Study of Magnetic Attractions" ซึ่งตีพิมพ์ในปี พ.ศ. 2367 ได้มีการอธิบายอุปกรณ์ที่เรียกว่า "Barlow's wheel"
ล้อของบาร์โลว์ตามหลักการทำงานเป็นเครื่องจักรไฟฟ้าแบบขั้วเดียวที่ทำงานในโหมดมอเตอร์: อันเป็นผลมาจากการทำงานร่วมกันของสนามแม่เหล็กของแม่เหล็กถาวรและกระแสที่ไหลผ่านเกียร์ทองแดงทั้งสองซึ่งอยู่บนแกนเดียวกัน ล้อ เริ่มหมุนไปในทิศทางเดียวกันอย่างรวดเร็ว บาร์โลว์พบว่าการเปลี่ยนแปลงของหน้าสัมผัสหรือการเปลี่ยนแปลงในตำแหน่งของขั้วแม่เหล็กทำให้เกิดการเปลี่ยนแปลงในทิศทางของการหมุนของล้อทันที
เป็นตัวอย่างหนึ่งของการออกแบบมอเตอร์ไฟฟ้า อุปกรณ์ที่อธิบายในปี 1833 โดยนักวิทยาศาสตร์ชาวอังกฤษ W. Ricci สามารถให้บริการได้ สนามแม่เหล็กในเครื่องยนต์นี้สร้างขึ้นโดยแม่เหล็กเกือกม้าแบบถาวร แม่เหล็กไฟฟ้าถูกวางไว้ระหว่างเสาเหล่านี้บนแกนตั้งโดยผ่านขดลวดที่กระแสไหลผ่าน ทิศทางของกระแสถูกเปลี่ยนเป็นระยะโดยสวิตช์ ปฏิกิริยาของขั้วแม่เหล็กถาวรและแม่เหล็กไฟฟ้าทำให้เกิดการหมุนของแม่เหล็กไฟฟ้ารอบแกน อย่างไรก็ตาม มอเตอร์ไฟฟ้านี้ เนื่องจากการออกแบบดั้งเดิมและใช้พลังงานต่ำ จึงไม่มีความสำคัญในทางปฏิบัติ
ในอุปกรณ์ของ J. Henry นักฟิสิกส์ชาวอเมริกัน การเปลี่ยนแปลงในขั้วของแม่เหล็กไฟฟ้าเกิดขึ้นเนื่องจากการเปลี่ยนแปลงในทิศทางของกระแสที่ไหลผ่านขดลวดของมัน มันทำให้แม่เหล็กไฟฟ้าเคลื่อนที่ในลักษณะโยกที่สม่ำเสมอ ในแบบจำลองที่สร้างขึ้นโดย Henry เอง แม่เหล็กไฟฟ้าทำการหมุน 75 ครั้งต่อนาที กำลังของเครื่องยนต์ประเภทนี้มีขนาดเล็กมาก ประมาณ 0.05 วัตต์
ในปี พ.ศ. 2377-2403 โครงสร้างปรากฏขึ้นพร้อมกับการเคลื่อนที่แบบหมุนของสมอเสาอย่างชัดเจน แรงบิดบนเพลาของเครื่องยนต์ดังกล่าวมักจะเป็นจังหวะอย่างรวดเร็ว
ที่สุด งานสำคัญสำหรับการออกแบบมอเตอร์ไฟฟ้าเป็นของนักวิทยาศาสตร์ชาวรัสเซีย B. S. Yakobi จากการศึกษาการออกแบบมอเตอร์ไฟฟ้าของรุ่นก่อนซึ่งมีการเคลื่อนที่แบบลูกสูบหรือแบบโยกของกระดอง Jacobi ให้ความเห็นเกี่ยวกับหนึ่งในนั้น: "อุปกรณ์ดังกล่าวจะไม่เกินของเล่นที่สนุกสำหรับการตกแต่งตู้ทางกายภาพ" และ ว่า “จะไม่สามารถนำไปใช้ในวงกว้างโดยมีประโยชน์ทางเศรษฐกิจอยู่บ้าง ดังนั้นเขาจึงหันความสนใจไปที่การสร้างมอเตอร์ไฟฟ้าที่ทรงพลังยิ่งขึ้นด้วยการเคลื่อนที่แบบหมุนของกระดอง
ในปี ค.ศ. 1834 จาโคบีได้สร้างและอธิบายมอเตอร์ไฟฟ้าที่ทำงานบนหลักการดึงดูดและแรงผลักระหว่างแม่เหล็กไฟฟ้า เครื่องยนต์นี้มีแม่เหล็กไฟฟ้ารูปตัวยูสองกลุ่ม ซึ่งกลุ่มหนึ่งตั้งอยู่บนโครงตายตัว และอีกกลุ่มที่คล้ายกันบนจานหมุน ใช้แบตเตอรีเซลล์กัลวานิกเป็นแหล่งจ่ายกระแสไฟให้กับแม่เหล็กไฟฟ้า เครื่องสับเปลี่ยนถูกใช้เพื่อสลับขั้วของแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้
จาโคบีสร้างมอเตอร์ไฟฟ้าเครื่องแรกในเดือนพฤษภาคม พ.ศ. 2377 และในเดือนพฤศจิกายนปีเดียวกัน เขาได้นำเสนอรายงานเกี่ยวกับอุปกรณ์นี้ต่อ Paris Academy of Sciences มันถูกอ่านในที่ประชุมของ Academy ในเดือนธันวาคม พ.ศ. 2377 และเผยแพร่ทันที
ในปี ค.ศ. 1837 ช่างเทคนิคชาวอเมริกัน ที. ดาเวนพอร์ต ได้สร้างมอเตอร์ไฟฟ้าด้วยการหมุนของกระดองโดยตรง โดยที่แม่เหล็กไฟฟ้าที่เคลื่อนที่ได้จะมีปฏิสัมพันธ์กับแม่เหล็กถาวรติดแน่น
หลักการทำงาน
มอเตอร์กระแสตรงใช้ในไดรฟ์ไฟฟ้าที่ต้องการการควบคุมความเร็วที่หลากหลาย ความแม่นยำสูงในการรักษาความเร็วของการหมุนของไดรฟ์ การควบคุมความเร็วจากค่าปกติ
มอเตอร์กระแสตรงเป็นอย่างไร
การทำงานของมอเตอร์ไฟฟ้ากระแสตรงขึ้นอยู่กับปรากฏการณ์ของการเหนี่ยวนำแม่เหล็กไฟฟ้า จากพื้นฐานทางวิศวกรรมไฟฟ้า เป็นที่ทราบกันดีอยู่แล้วว่าตัวนำที่มีกระแสไฟฟ้าอยู่ในสนามแม่เหล็กอยู่ภายใต้แรงที่กำหนดโดยกฎมือซ้าย:
โดยที่ I คือกระแสที่ไหลผ่านตัวนำ B คือการเหนี่ยวนำของสนามแม่เหล็ก L คือความยาวของตัวนำ
เมื่อตัวนำผ่านสนามแม่เหล็ก เส้นแรงรถยนต์ในนั้นถูกกระตุ้น แรงเคลื่อนไฟฟ้าซึ่งเมื่อเทียบกับกระแสในตัวนำนั้นถูกต่อต้านดังนั้นจึงเรียกว่าย้อนกลับหรือตอบโต้ (counter-e.d. s) พลังงานไฟฟ้าในเครื่องยนต์จะถูกแปลงเป็นพลังงานกลและใช้บางส่วนในการให้ความร้อนแก่ตัวนำ
โครงสร้าง มอเตอร์ไฟฟ้ากระแสตรงทั้งหมดประกอบด้วยตัวเหนี่ยวนำและอาร์เมเจอร์คั่นด้วยช่องว่างอากาศ
ตัวเหนี่ยวนำมอเตอร์กระแสตรงใช้เพื่อสร้างสนามแม่เหล็กที่อยู่กับที่ของเครื่องและประกอบด้วยโครง เสาหลักและเสาเพิ่มเติม เฟรมใช้สำหรับยึดเสาหลักและเสาเพิ่มเติมและเป็นองค์ประกอบของวงจรแม่เหล็กของเครื่อง บนเสาหลักมีขดลวดกระตุ้นที่ออกแบบมาเพื่อสร้างสนามแม่เหล็กของเครื่อง บนเสาเพิ่มเติมจะมีขดลวดพิเศษที่ทำหน้าที่ปรับปรุงสภาพการสลับ
อาร์เมเจอร์ของมอเตอร์กระแสตรงประกอบด้วยระบบแม่เหล็กที่ประกอบขึ้นจากแผ่นที่แยกจากกัน ขดลวดทำงานที่วางอยู่ในร่อง และตัวสะสมที่ใช้ในการจ่ายไฟ การทำงานที่คดเคี้ยวกระแสตรง.
ตัวสะสมคือกระบอกสูบที่ติดตั้งบนเพลามอเตอร์และเลือกจากแผ่นทองแดงที่แยกจากกัน มีส่วนที่ยื่นออกมา - กระทงบนตัวสะสมซึ่งส่วนปลายของส่วนที่คดเคี้ยวของกระดองนั้นถูกบัดกรี การกำจัดกระแสไฟออกจากตัวสะสมจะดำเนินการโดยใช้แปรงที่ให้หน้าสัมผัสแบบเลื่อนกับตัวสะสม แปรงได้รับการแก้ไขในที่ยึดแปรงซึ่งถือไว้ในตำแหน่งที่แน่นอนและให้การกดแปรงที่จำเป็นบนพื้นผิวของตัวสะสม แปรงและที่ยึดแปรงจับจ้องอยู่ที่แนวขวางที่เชื่อมต่อกับตัวเรือนมอเตอร์
การสลับในมอเตอร์กระแสตรง
ระหว่างการทำงานของมอเตอร์กระแสตรง แปรงจะเลื่อนผ่านพื้นผิวของตัวสะสมแบบหมุน เคลื่อนจากแผ่นสะสมหนึ่งไปยังอีกแผ่นหนึ่งตามลำดับ ในกรณีนี้ส่วนขนานของขดลวดกระดองจะถูกเปลี่ยนและกระแสในนั้นจะเปลี่ยนไป การเปลี่ยนแปลงของกระแสจะเกิดขึ้นในเวลาที่ขดลวดของขดลวดลัดวงจรด้วยแปรง กระบวนการเปลี่ยนและปรากฏการณ์ที่เกี่ยวข้องกับกระบวนการนี้เรียกว่าการเปลี่ยน
ในขณะที่เปลี่ยนในส่วนลัดวงจรของขดลวด e ถูกเหนี่ยวนำภายใต้อิทธิพลของสนามแม่เหล็กของตัวเอง ดีเอส การเหนี่ยวนำตนเอง ผลลัพธ์ e. ดีเอส ทำให้เกิดกระแสเพิ่มเติมในส่วนที่ลัดวงจร ซึ่งสร้างการกระจายความหนาแน่นกระแสบนพื้นผิวสัมผัสของแปรงไม่สม่ำเสมอ เหตุการณ์นี้ถือเป็นสาเหตุหลักของการเกิดประกายไฟของตัวสะสมใต้แปรง คุณภาพของสวิตชิ่งจะถูกประเมินโดยระดับของการเกิดประกายไฟภายใต้ขอบวิ่งของแปรง และพิจารณาจากมาตราส่วนของระดับการเกิดประกายไฟ
วิธีกระตุ้นมอเตอร์กระแสตรง
การกระตุ้นของเครื่องจักรไฟฟ้าเป็นที่เข้าใจกันว่าเป็นการสร้างสนามแม่เหล็กในนั้น ซึ่งจำเป็นสำหรับการทำงานของมอเตอร์ไฟฟ้า
ตามวิธีการกระตุ้นมอเตอร์ไฟฟ้ากระแสตรงแบ่งออกเป็นสี่กลุ่ม:
1. C ปลุกเร้าอิสระซึ่งขดลวดกระตุ้น NOV นั้นใช้พลังงานจากแหล่ง DC ภายนอก
2. C การกระตุ้นแบบขนาน(shunt) ซึ่งขดลวดกระตุ้น SHOV เชื่อมต่อขนานกับแหล่งพลังงานของขดลวดกระดอง
3. ด้วยการกระตุ้นแบบอนุกรม (series) ซึ่งขดลวดกระตุ้นของ SOW นั้นเชื่อมต่อแบบอนุกรมกับขดลวดกระดอง
4. เครื่องยนต์ที่มีแรงกระตุ้นแบบผสม (สารประกอบ) ซึ่งมี SOV แบบอนุกรมและ SOV แบบขนานของขดลวดกระตุ้น
การสตาร์ทมอเตอร์กระแสตรง
ในช่วงเริ่มต้นของการสตาร์ทเครื่องยนต์ สมอจะอยู่กับที่และตัวนับ-e ดีเอส และแรงดันกระดองเป็นศูนย์ ดังนั้น Ip = U / Rya
ความต้านทานของวงจรกระดองมีขนาดเล็ก ดังนั้นกระแสเริ่มต้นคือ 10 ถึง 20 เท่าหรือมากกว่ากระแสที่กำหนด สิ่งนี้สามารถทำให้เกิดแรงอิเล็กโทรไดนามิกที่สำคัญในขดลวดกระดองและความร้อนสูงเกินไป ดังนั้นเครื่องยนต์จึงเริ่มทำงานโดยใช้รีโอสแตตสตาร์ท - ความต้านทานแบบแอคทีฟที่รวมอยู่ในวงจรกระดอง
มอเตอร์สูงถึง 1 กิโลวัตต์ช่วยให้สตาร์ทได้โดยตรง
ค่าความต้านทานของลิโน่สตาร์ทจะถูกเลือกตามกระแสเริ่มต้นที่อนุญาตของมอเตอร์ รีโอสแตทถูกเพิ่มความเร็วเพื่อปรับปรุงความนุ่มนวลในการสตาร์ทมอเตอร์ไฟฟ้า
ในช่วงเริ่มต้นของการเริ่มต้น จะมีการแนะนำความต้านทานทั้งหมดของลิโน่สเตท เมื่อความเร็วของเกราะเพิ่มขึ้น counter-e จะเกิดขึ้น d.s. ซึ่งจำกัดกระแสเริ่มต้น ค่อยๆถอดความต้านทานของลิโน่ออกจากวงจรกระดองทีละน้อยแรงดันไฟฟ้าที่จ่ายให้กับกระดองจะเพิ่มขึ้น ความเร็วของมอเตอร์กระแสตรงสามารถควบคุมได้สามวิธี: โดยการเปลี่ยนฟลักซ์การกระตุ้นของมอเตอร์ โดยการเปลี่ยนแรงดันไฟฟ้าที่ใช้กับมอเตอร์ และโดยการเปลี่ยนความต้านทานในวงจรกระดอง
ที่สุด ประยุกต์กว้างได้รับการควบคุมสองวิธีแรกวิธีที่สามไม่ค่อยได้ใช้: ไม่ประหยัดในขณะที่ความเร็วของมอเตอร์ขึ้นอยู่กับความผันผวนของโหลดอย่างมาก ลักษณะทางกลของมอเตอร์ไฟฟ้ากระแสตรงที่มีวิธีการควบคุมความเร็วแบบต่างๆ
เส้นหนาคือการพึ่งพาความเร็วตามธรรมชาติของแรงบิดบนเพลาหรือซึ่งเหมือนกันกับกระแสของกระดอง เส้นตรงของลักษณะทางกลตามธรรมชาติเบี่ยงเบนไปจากเส้นประแนวนอนบ้าง ค่าเบี่ยงเบนนี้เรียกว่าความไม่เสถียร ไม่แข็งกระด้าง บางครั้งก็คงที่ กลุ่มของเส้นที่ไม่ขนานกัน I สอดคล้องกับการควบคุมความเร็วโดยการกระตุ้น, เส้นคู่ขนาน II ได้มาจากการเปลี่ยนแรงดันไฟฟ้าของกระดองและในที่สุดพัดลม III เป็นผลมาจากการแนะนำเกราะต้านทานแบบแอคทีฟในวงจร
ค่าของกระแสกระตุ้นของมอเตอร์กระแสตรงสามารถควบคุมได้โดยใช้ลิโน่หรืออุปกรณ์ใดๆ ที่ค่าความต้านทานเชิงแอคทีฟสามารถเปลี่ยนค่าได้ เช่น ทรานซิสเตอร์ ด้วยความต้านทานในวงจรที่เพิ่มขึ้นกระแสกระตุ้นจะลดลงความเร็วของเครื่องยนต์จะเพิ่มขึ้น เมื่อฟลักซ์แม่เหล็กอ่อนลง ลักษณะทางกลอยู่เหนือธรรมชาติ (กล่าวคือ อยู่เหนือลักษณะเฉพาะในกรณีที่ไม่มีลิโน่) การเพิ่มความเร็วของเครื่องยนต์ทำให้เกิดประกายไฟเพิ่มขึ้นภายใต้แปรง นอกจากนี้ เมื่อมอเตอร์ไฟฟ้าทำงานโดยมีการไหลที่ลดลง ความเสถียรของการทำงานจะลดลง โดยเฉพาะเมื่อ โหลดตัวแปรบนเพลา ดังนั้นขีดจำกัดของการควบคุมความเร็วในลักษณะนี้จะต้องไม่เกิน 1.25 - 1.3 ของค่าที่กำหนด
การควบคุมแรงดันไฟฟ้าแบบแปรผันต้องใช้แหล่งจ่ายกระแสคงที่ เช่น เครื่องกำเนิดหรือตัวแปลง กฎระเบียบดังกล่าวใช้ในระบบขับเคลื่อนไฟฟ้าอุตสาหกรรมทั้งหมด: เครื่องกำเนิดไฟฟ้า - มอเตอร์ DC (G - DPT), เครื่องขยายเสียงเครื่องจักรไฟฟ้า - มอเตอร์ DC (EMU - DPT), เครื่องขยายสัญญาณแม่เหล็ก - มอเตอร์ DC (MU - DPT), ตัวแปลงไทริสเตอร์ - มอเตอร์กระแสตรง (T - DPT)
การเบรกของมอเตอร์กระแสตรง
ในไดรฟ์ไฟฟ้าที่มีมอเตอร์กระแสตรง มีการเบรกสามวิธี: การเบรกแบบไดนามิก รีเจนเนอเรทีฟ และกระแสย้อนกลับ
การเบรกแบบไดนามิกมอเตอร์กระแสตรงดำเนินการโดยลัดวงจรขดลวดกระดองของมอเตอร์หรือผ่านตัวต้านทาน ในกรณีนี้ มอเตอร์กระแสตรงเริ่มทำงานเป็นเครื่องกำเนิดไฟฟ้า โดยแปลงพลังงานกลที่เก็บไว้เป็นพลังงานไฟฟ้า พลังงานนี้ถูกปล่อยออกมาในรูปของความร้อนในความต้านทานที่ขดลวดกระดองปิด การเบรกแบบไดนามิกช่วยหยุดมอเตอร์ไฟฟ้าได้อย่างแม่นยำ
การเบรกแบบสร้างใหม่ของมอเตอร์กระแสตรงเกิดขึ้นเมื่อมอเตอร์ไฟฟ้าที่เชื่อมต่อกับเครือข่ายถูกหมุนโดยแอคชูเอเตอร์ด้วยความเร็วที่เกินความเร็วรอบเดินเบาในอุดมคติ แล้ว อี. d.s. เหนี่ยวนำในขดลวดของมอเตอร์มีค่าเกินกว่าแรงดันไฟหลัก กระแสในขดลวดของมอเตอร์จะเปลี่ยนทิศทางไปในทิศทางตรงกันข้าม มอเตอร์ไฟฟ้าสลับการทำงานในโหมดเครื่องกำเนิดไฟฟ้าโดยให้พลังงานแก่เครือข่าย ในเวลาเดียวกัน แรงบิดในการเบรกก็เกิดขึ้นที่เพลาของมัน โหมดดังกล่าวสามารถรับได้ในไดรฟ์ของกลไกการยกเมื่อลดภาระ เช่นเดียวกับเมื่อควบคุมความเร็วของเครื่องยนต์และระหว่างกระบวนการเบรกในไดรฟ์ไฟฟ้ากระแสตรง
การเบรกแบบสร้างใหม่ของมอเตอร์กระแสตรงเป็นวิธีที่ประหยัดที่สุด เนื่องจากจะส่งกระแสไฟฟ้ากลับคืนสู่กริด ในการขับเคลื่อนไฟฟ้าของเครื่องมือเครื่องตัดโลหะ วิธีนี้ใช้สำหรับควบคุมความเร็วในระบบ G-DPT และ EMU-DPT
การเบรกโดยการรวมตัวของมอเตอร์กระแสตรงเข้าด้วยกันนั้นทำได้โดยการเปลี่ยนขั้วของแรงดันและกระแสในขดลวดกระดอง เมื่อกระแสของกระดองโต้ตอบกับสนามแม่เหล็กของสนามที่คดเคี้ยว แรงบิดในการเบรกจะถูกสร้างขึ้น ซึ่งจะลดลงเมื่อความเร็วของมอเตอร์ลดลง เมื่อความเร็วของมอเตอร์ลดลงเป็นศูนย์ มอเตอร์จะต้องถูกตัดการเชื่อมต่อจากเครือข่าย มิฉะนั้น มอเตอร์จะเริ่มหมุนไปในทิศทางตรงกันข้าม
ประวัติมอเตอร์ไฟฟ้า
หลักการของการแปลงพลังงานไฟฟ้าเป็นพลังงานกลโดยสนามแม่เหล็กไฟฟ้านั้นแสดงให้เห็นโดยนักวิทยาศาสตร์ชาวอังกฤษ Michael ในปี ค.ศ. 1821 และประกอบด้วยลวดแขวนอิสระที่จุ่มลงในสารปรอท มีการติดตั้งแม่เหล็กถาวรไว้ตรงกลางอ่างปรอท เมื่อกระแสไหลผ่านลวด ลวดจะหมุนไปรอบๆ แม่เหล็ก แสดงว่ากระแสทำให้เกิดสนามแม่เหล็กแบบวนรอบเส้นลวด เครื่องยนต์นี้มักจะแสดงให้เห็นในชั้นเรียนฟิสิกส์ของโรงเรียนโดยใช้น้ำเกลือแทนปรอทที่เป็นพิษ นี่เป็นรูปแบบที่ง่ายที่สุดในกลุ่มมอเตอร์ไฟฟ้า การปรับปรุงต่อไปคือ . เป็นอุปกรณ์สาธิตใช้ไม่ได้ใน การใช้งานจริงเนื่องจากกำลังมีจำกัด
นักประดิษฐ์พยายามสร้างมอเตอร์ไฟฟ้าสำหรับความต้องการทางอุตสาหกรรม พวกเขาพยายามทำให้แกนเหล็กเคลื่อนที่ในสนามของลูกสูบแม่เหล็กไฟฟ้า นั่นคือวิธีที่ลูกสูบเคลื่อนที่ในกระบอกสูบเครื่องยนต์ไอน้ำ นักวิทยาศาสตร์ชาวรัสเซีย BS Yakobi ใช้เส้นทางที่แตกต่างออกไป ในปี ค.ศ. 1834 เขาได้สร้างมอเตอร์ไฟฟ้าที่ใช้งานได้จริงเครื่องแรกของโลกที่มีกระดองหมุน และตีพิมพ์งานเชิงทฤษฎีเรื่อง "การใช้แม่เหล็กไฟฟ้าเพื่อขับเคลื่อนเครื่องจักร" เขียนว่าเครื่องยนต์ของเขาเรียบง่ายและ "ให้การเคลื่อนที่แบบวงกลมโดยตรง ซึ่งง่ายต่อการแปลงเป็นการเคลื่อนที่ประเภทอื่นมากกว่าแบบลูกสูบ"
การเคลื่อนที่แบบหมุนเกราะในเครื่องยนต์จาโคบีเกิดจากการสลับกันของแรงดึงดูดและแรงผลักของแม่เหล็กไฟฟ้า คงกลุ่มแม่เหล็กไฟฟ้ารูปตัวยูถูกขับเคลื่อนโดยกระแสไฟโดยตรงจากแบตเตอรี่กัลวานิก และทิศทางของกระแสในแม่เหล็กไฟฟ้าเหล่านี้ยังคงไม่เปลี่ยนแปลง กลุ่มแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้เชื่อมต่อกับแบตเตอรี่ผ่านเครื่องสับเปลี่ยนด้วยความช่วยเหลือของทิศทางของกระแสในแม่เหล็กไฟฟ้าแต่ละตัวเปลี่ยนหนึ่งครั้งต่อการปฏิวัติของดิสก์ ในกรณีนี้ ขั้วของแม่เหล็กไฟฟ้าก็เปลี่ยนไปตามไปด้วย และแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้แต่ละตัวก็ถูกดึงดูดและขับไล่สลับกันด้วยแม่เหล็กไฟฟ้าที่อยู่กับที่: เพลามอเตอร์เริ่มหมุน พลังของเครื่องยนต์ดังกล่าวมีเพียง 15 วัตต์ ต่อจากนั้น Jacobi นำพลังของมอเตอร์ไฟฟ้ามาที่ 550 วัตต์ เครื่องยนต์นี้ได้รับการติดตั้งครั้งแรกบนเรือและต่อมาบนรางรถไฟ
ในปี ค.ศ. 1839 จาโคบีสร้างเรือลำหนึ่งด้วยเครื่องยนต์แม่เหล็กไฟฟ้า ซึ่งพัฒนา 1 แรงม้าจากองค์ประกอบ 69 โกรฟ และเคลื่อนย้ายเรือพร้อมผู้โดยสาร 14 คนไปตามแม่น้ำเนวาทวนกระแสน้ำ นี่เป็นครั้งแรกที่ประยุกต์ใช้แม่เหล็กไฟฟ้าในการเคลื่อนที่ในวงกว้าง
โครงสร้างของมอเตอร์ไฟฟ้า
โรเตอร์ -. สเตเตอร์.
สเตเตอร์ -ส่วนคงที่ไฟฟ้า, กระดูกสะบักโรเตอร์. ในกรณีของฉัน แบตเตอรี่จะทำหน้าที่เป็นสเตเตอร์ สเตเตอร์มีสองขั้ว
การประยุกต์ใช้มอเตอร์ไฟฟ้า
มอเตอร์ไฟฟ้าถูกใช้ทุกที่ แม้แต่ที่บ้าน คุณสามารถหามอเตอร์ไฟฟ้าจำนวนมากได้ มอเตอร์ไฟฟ้าใช้ในนาฬิกา พัดลมเตาอบไมโครเวฟ เครื่องซักผ้า พัดลมคอมพิวเตอร์ เครื่องปรับอากาศ เครื่องคั้นน้ำ เป็นต้น
หลักการทำงานของมอเตอร์ไฟฟ้า
มอเตอร์ไฟฟ้าเป็นเพียงอุปกรณ์สำหรับแปลงพลังงานไฟฟ้าเป็นพลังงานกลอย่างมีประสิทธิภาพ
การเปลี่ยนแปลงนี้มีพื้นฐานมาจากสนามแม่เหล็ก มอเตอร์ไฟฟ้าใช้แม่เหล็กถาวรและแม่เหล็กไฟฟ้า และใช้คุณสมบัติทางแม่เหล็กของวัสดุต่างๆ เพื่อสร้างอุปกรณ์ที่น่าทึ่งเหล่านี้
โรเตอร์ -ส่วนที่หมุนได้ของเครื่องยนต์และเครื่องจักรทำงาน ซึ่งอวัยวะนั้นตั้งอยู่ซึ่งรับพลังงานจากของไหลทำงานหรือส่งไปยังของไหลทำงาน. โรเตอร์ทำในรูปแบบของดรัม, ดิสก์, ล้อ (ในกรณีของฉันคือวงแหวน) โรเตอร์มีความเกี่ยวข้องอย่างใกล้ชิดกับแนวคิดสเตเตอร์. โรเตอร์มีเสาอย่างน้อยหนึ่งคู่ (เช่น สเตเตอร์ มิฉะนั้น มอเตอร์จะไม่ทำงาน)
สเตเตอร์ -ส่วนคงที่ไฟฟ้า, กระดูกสะบักและอีกเครื่องหนึ่งโต้ตอบกับส่วนที่เคลื่อนไหว -โรเตอร์. ในกรณีของฉันแบตเตอรี่จะทำหน้าที่เป็นสเตเตอร์) สเตเตอร์มีสองขั้ว
งานวิจัยในหัวข้อ: "มอเตอร์ไฟฟ้า" งานนี้ดำเนินการโดย: นักเรียนชั้นประถมศึกษาปีที่ 9 ของสถาบันการศึกษาเทศบาล "โรงยิมหมายเลข 1 ใน Maysky" Golovchansky Sergey Supervisor: อาจารย์วิชาฟิสิกส์ของสถาบันการศึกษาเทศบาล "โรงยิม อันดับ 1 ใน Maisky" Zhuravlev Alexander Mikhailovich
วัตถุประสงค์ของการศึกษา: มอเตอร์ไฟฟ้า หัวข้อการศึกษา: ระดับการใช้งานใน สังคมสมัยใหม่ด้วยคุณสมบัติทางเทคนิค วัตถุประสงค์: เพื่อผลิตมอเตอร์ไฟฟ้ารุ่นอิสระซึ่งเป็นจุดเริ่มต้นสำหรับการสร้างมอเตอร์ไฟฟ้าที่ทันสมัยและทดลองทดสอบประสิทธิภาพของแบบจำลองมอเตอร์ไฟฟ้าแบบฝึก ภารกิจ: - เพื่อศึกษาหลักการ ของการทำงานของมอเตอร์ไฟฟ้า - ทำความคุ้นเคยกับประวัติความเป็นมาของการพัฒนามอเตอร์ไฟฟ้า ; - ทำโมเดลของมอเตอร์ไฟฟ้า - คำนวณประสิทธิภาพของมอเตอร์ไฟฟ้า
เส้นทางประวัติศาสตร์ของมอเตอร์ไฟฟ้า Jacobi BS 1834 สร้างมอเตอร์ไฟฟ้าที่ใช้งานได้จริงเครื่องแรกของโลกที่มีกระดองหมุน Michael Faraday 1821 แสดงให้เห็นถึงหลักการของการแปลงพลังงานไฟฟ้าเป็นพลังงานกลด้วยสนามแม่เหล็กไฟฟ้า Peter Barlow 1824 ล้อของ Barlow ไม่มีนัยสำคัญในทางปฏิบัติและยังคงอยู่ วันนี้เครื่องมือสาธิตในห้องปฏิบัติการ
ฟิสิกส์ของมอเตอร์ไฟฟ้า กฎมือซ้าย สนามแม่เหล็กเป็นรูปแบบของสสารที่ล้อมรอบประจุไฟฟ้าที่กำลังเคลื่อนที่ คำว่า "สนามแม่เหล็ก" ถูกนำมาใช้ครั้งแรกในปี พ.ศ. 2388 โดยนักฟิสิกส์ชาวอังกฤษชื่อฟาราเดย์ แรงที่สนามแม่เหล็กกระทำต่อตัวนำที่มีกระแสไฟฟ้าเรียกว่าแรงแอมแปร์ ทิศทางของเวกเตอร์แรงแอมป์ถูกกำหนดโดยกฎมือซ้าย
หลักการทำงานของมอเตอร์ไฟฟ้า ในมอเตอร์ไฟฟ้า แรงแอมแปร์จะใช้ในการแปลงพลังงานไฟฟ้าเป็นพลังงานกล ประสิทธิภาพของมอเตอร์ไฟฟ้าทรงพลังถึง 98% ไม่มีเครื่องยนต์อื่นใดที่มีประสิทธิภาพสูงเช่นนี้
ประสิทธิภาพการแปลงมอเตอร์ไฟฟ้า
ข้อสรุปหลักของงาน 1. N. Syadristy สร้างมอเตอร์ไฟฟ้าที่เล็กที่สุดในโลก เครื่องยนต์มี 15 ส่วน แต่มีขนาดเล็กกว่าเมล็ดงาดำถึง 4 เท่า! 2. มอเตอร์ไฟฟ้ากระแสตรงที่ใหญ่ที่สุดใช้สำหรับขับเคลื่อนใบพัดของเรือตัดน้ำแข็ง Sibir และ Arktika ที่ใช้พลังงานนิวเคลียร์ของรัสเซีย กำลังเครื่องยนต์ 176,000 kW ประสิทธิภาพ - 0.95 3. เมื่อพยายามสร้างอุปกรณ์นี้หรืออุปกรณ์นั้นด้วยตัวเอง ฉันพบว่าแต่ละอุปกรณ์มี "ความลับ" ของตัวเอง โดยไม่รู้ว่าอุปกรณ์ใดใช้ไม่ได้ผล 4. หลังจากทำงานอย่างหนักในการศึกษาวรรณกรรมเกี่ยวกับการสร้างมอเตอร์ไฟฟ้าตัวแรกบนหลักการทางกายภาพของการทำงานของพวกเขาในการใช้งานในวันนี้ในทุกสาขาของชีวิต ฉันสามารถพูดได้อย่างมั่นใจว่ามอเตอร์ไฟฟ้าเป็นจริง สิ่งประดิษฐ์ทางเลือกที่ทันสมัย
วางแผน:
- บทนำ
- 1 หลักการทำงาน
- 2
การจำแนกประเภทของมอเตอร์ไฟฟ้า
- 2.1 มอเตอร์กระแสตรง
- 2.2 มอเตอร์ไฟฟ้ากระแสสลับ
- 2.3
- 3 ประวัติศาสตร์ หมายเหตุ
บทนำ
มอเตอร์ไฟฟ้าที่มีกำลังต่างกัน (750 W, 25 W, สำหรับเครื่องเล่นซีดี, สำหรับของเล่น, สำหรับฟลอปปีไดรฟ์) แบตเตอรี่ "Krona" มีไว้เพื่อเปรียบเทียบ
เครื่องยนต์ไฟฟ้า- เครื่องจักรไฟฟ้า (ตัวแปลงไฟฟ้า) ซึ่งพลังงานไฟฟ้าจะถูกแปลงเป็นพลังงานกล ผลข้างเคียงคือการปล่อยความร้อน
1. หลักการทำงาน
การทำงานของเครื่องไฟฟ้าใด ๆ ขึ้นอยู่กับหลักการเหนี่ยวนำแม่เหล็กไฟฟ้า เครื่องไฟฟ้าประกอบด้วยสเตเตอร์ (ส่วนคงที่) และโรเตอร์ (กระดองในกรณีของเครื่อง DC) (ส่วนที่เคลื่อนที่) ไฟฟ้าช็อต(หรือแม่เหล็กถาวรด้วย) ซึ่งสร้างสนามแม่เหล็กคงที่และ/หรือหมุนได้
สเตเตอร์- ส่วนคงที่ของมอเตอร์ไฟฟ้า ส่วนใหญ่ - ส่วนภายนอก ขึ้นอยู่กับประเภทของมอเตอร์ มันสามารถสร้างสนามแม่เหล็กคงที่และประกอบด้วยแม่เหล็กถาวรและ/หรือแม่เหล็กไฟฟ้า หรือสร้างสนามแม่เหล็กหมุนได้ (และประกอบด้วยขดลวดที่ขับเคลื่อนด้วยกระแสสลับ)
โรเตอร์- ส่วนที่เคลื่อนที่ของมอเตอร์ไฟฟ้า ซึ่งส่วนใหญ่มักจะอยู่ภายในสเตเตอร์
โรเตอร์อาจประกอบด้วย:
- แม่เหล็กถาวร
- ขดลวดที่แกน (เชื่อมต่อผ่านชุดแปรงเก็บ);
- ขดลวดลัดวงจร ("ล้อกระรอก" หรือ "กรงกระรอก") ซึ่งกระแสเกิดขึ้นภายใต้การกระทำของสนามแม่เหล็กหมุนของสเตเตอร์)
ปฏิสัมพันธ์ของสนามแม่เหล็กของสเตเตอร์และโรเตอร์จะสร้างแรงบิดที่ทำให้โรเตอร์ของมอเตอร์เคลื่อนที่ นี่คือวิธีที่พลังงานไฟฟ้าที่จ่ายให้กับขดลวดของมอเตอร์จะถูกแปลงเป็นพลังงานกล (จลนศาสตร์) ของการหมุน พลังงานกลที่เกิดขึ้นสามารถใช้ขับเคลื่อนกลไกได้
2. การจำแนกประเภทของมอเตอร์ไฟฟ้า
ตามหลักการสร้างแรงบิด มอเตอร์ไฟฟ้าสามารถแบ่งออกเป็น ฮิสเทรีซิสและ แม่เหล็กไฟฟ้า. สำหรับมอเตอร์ของกลุ่มแรก แรงบิดถูกสร้างขึ้นเนื่องจากฮิสเทรีซิสเมื่อโรเตอร์ถูกแม่เหล็กใหม่ มอเตอร์เหล่านี้ไม่ใช่มอเตอร์แบบดั้งเดิมและไม่ได้ใช้กันอย่างแพร่หลายในอุตสาหกรรม
ที่พบมากที่สุดคือมอเตอร์แม่เหล็กซึ่งตามประเภทของพลังงานที่ใช้แบ่งออกเป็นสองกลุ่มใหญ่ - มอเตอร์กระแสตรงและ มอเตอร์ไฟฟ้ากระแสสลับ(ยังมีอยู่ มอเตอร์สากลซึ่งสามารถจ่ายกระแสไฟได้ทั้งสองแบบ)
2.1. มอเตอร์กระแสตรง
มอเตอร์กระแสตรงแบบคัตอะเวย์ ทางขวามือคือนักสะสมพร้อมพู่กัน
มอเตอร์กระแสตรง- มอเตอร์ไฟฟ้าที่ขับเคลื่อนด้วยกระแสตรง ในทางกลับกันเครื่องยนต์กลุ่มนี้ตามการปรากฏตัวของชุดสะสมแปรงแบ่งออกเป็น:
- มอเตอร์สะสม;
- มอเตอร์แบบไม่มีแปรง
หน่วยเก็บแปรงให้ การเชื่อมต่อไฟฟ้าวงจรของชิ้นส่วนที่หมุนและอยู่กับที่ของเครื่องและเป็นองค์ประกอบโครงสร้างที่ไม่น่าเชื่อถือและยากต่อการบำรุงรักษามากที่สุด:27.
ตามประเภทของการกระตุ้น มอเตอร์สะสมสามารถแบ่งออกเป็น:
- มอเตอร์ที่มีการกระตุ้นจากแม่เหล็กไฟฟ้า
- มอเตอร์ที่มีการกระตุ้นด้วยแม่เหล็กถาวร
มอเตอร์ของกลุ่มแรกประกอบด้วยขดลวดกระตุ้นที่ขับเคลื่อนด้วยกระแสไฟฟ้าในขณะที่เป็นไปได้ วิธีต่างๆความสัมพันธ์ของพวกเขา:
- การเชื่อมต่อแบบขนานของขดลวดกระตุ้นและกระดอง
- การเชื่อมต่อแบบอนุกรมของขดลวดกระตุ้นและกระดอง
- การเชื่อมต่อแบบผสมของขดลวดกระตุ้นและกระดอง
มอเตอร์ไร้แปรงถ่าน (มอเตอร์ไร้แปรงถ่าน) - มอเตอร์ไฟฟ้าที่ผลิตขึ้นในรูปแบบของระบบปิดโดยใช้เซ็นเซอร์ตำแหน่งโรเตอร์ ระบบควบคุม (คอนเวอร์เตอร์คอนเวอร์เตอร์) และคอนเวอร์เตอร์เซมิคอนดักเตอร์กำลัง (อินเวอร์เตอร์) หลักการทำงานของเครื่องยนต์เหล่านี้คล้ายกับหลักการทำงานของเครื่องยนต์ มอเตอร์ซิงโครนัส :28 .
2.2. มอเตอร์ไฟฟ้ากระแสสลับ
มอเตอร์แบบอะซิงโครนัสสามเฟส
มอเตอร์ไฟฟ้ากระแสสลับ- มอเตอร์ไฟฟ้าขับเคลื่อนด้วยไฟฟ้ากระแสสลับ ตามหลักการทำงาน เครื่องยนต์เหล่านี้แบ่งออกเป็น ซิงโครนัสและ มอเตอร์แบบอะซิงโครนัส. ความแตกต่างพื้นฐานคือในเครื่องซิงโครนัสฮาร์โมนิกแรกของแรงแม่เหล็กของสเตเตอร์จะเคลื่อนที่ด้วยความเร็วของการหมุนของโรเตอร์ในขณะที่เครื่องอะซิงโครนัสจะต้องมีความแตกต่างของความเร็วเสมอ
มอเตอร์ซิงโครนัส- มอเตอร์ไฟฟ้ากระแสสลับซึ่งโรเตอร์หมุนพร้อมกันกับสนามแม่เหล็กของแรงดันไฟฟ้า เครื่องยนต์เหล่านี้มักจะใช้กำลังสูง (หลายร้อยกิโลวัตต์ขึ้นไป):28.
มีมอเตอร์ซิงโครนัสที่มีการกระจัดเชิงมุมแบบไม่ต่อเนื่องของโรเตอร์ - สเต็ปเปอร์มอเตอร์. พวกเขามีตำแหน่งที่กำหนดของโรเตอร์ได้รับการแก้ไขโดยการจ่ายพลังงานให้กับขดลวดที่สอดคล้องกัน การเปลี่ยนไปยังตำแหน่งอื่นทำได้โดยการถอดแรงดันไฟฟ้าออกจากขดลวดบางส่วนแล้วโอนไปยังตำแหน่งอื่น มอเตอร์ซิงโครนัสอีกประเภทหนึ่งคือมอเตอร์รีลักแตนซ์วาล์วซึ่งเป็นแหล่งจ่ายไฟของขดลวดที่เกิดขึ้นโดยใช้องค์ประกอบเซมิคอนดักเตอร์
มอเตอร์แบบอะซิงโครนัส- มอเตอร์กระแสสลับซึ่งความเร็วของโรเตอร์แตกต่างจากความถี่ของสนามแม่เหล็กหมุนที่สร้างขึ้นโดยแรงดันไฟฟ้า เครื่องยนต์เหล่านี้มีมากที่สุดในปัจจุบัน
ตามจำนวนเฟส มอเตอร์ไฟฟ้ากระแสสลับแบ่งออกเป็น:
- เฟสเดียว - เริ่มต้นด้วยตนเองหรือมีขดลวดสตาร์ทหรือมีวงจรเปลี่ยนเฟส
- สองเฟส - รวมถึงตัวเก็บประจุ
- สามเฟส;
- หลายเฟส;
2.3. มอเตอร์สับเปลี่ยนอเนกประสงค์
มอเตอร์สับเปลี่ยนอเนกประสงค์ - มอเตอร์สับเปลี่ยนซึ่งสามารถทำงานได้ทั้งกระแสตรงและกระแสสลับ มอเตอร์ไฟฟ้ากระแสสลับที่ขับเคลื่อนโดยเครือข่ายอุตสาหกรรม 50 Hz ไม่อนุญาตให้มีความเร็วสูงกว่า 3000 รอบต่อนาที ดังนั้น เพื่อให้ได้ ความถี่สูงพวกเขาใช้มอเตอร์ไฟฟ้าแบบสะสมซึ่งเบากว่าและเล็กกว่ามอเตอร์ AC ที่มีกำลังเท่ากัน หรือใช้กลไกการส่งผ่านพิเศษที่เปลี่ยนพารามิเตอร์จลนศาสตร์ของกลไกเป็นสิ่งที่เราต้องการ (ตัวคูณ) เมื่อใช้ตัวแปลงความถี่หรือมีเครือข่ายความถี่สูง (100, 200, 400 Hz) มอเตอร์ AC จะเบากว่าและเล็กกว่ามอเตอร์ตัวรวบรวม ทรัพยากร มอเตอร์เหนี่ยวนำกระแสสลับนั้นสูงกว่าของตัวสะสมมากและถูกกำหนดโดยสภาพของตลับลูกปืนและฉนวนของขดลวด
มอเตอร์ซิงโครนัสที่มีเซ็นเซอร์ตำแหน่งโรเตอร์และอินเวอร์เตอร์เป็นแอนะล็อกอิเล็กทรอนิกส์ของมอเตอร์ตัวรวบรวมกระแสตรง
3. ประวัติศาสตร์
หลักการของการแปลงพลังงานไฟฟ้าเป็นพลังงานกลโดยสนามแม่เหล็กไฟฟ้าได้แสดงให้เห็นโดยนักวิทยาศาสตร์ชาวอังกฤษ Michael Faraday ในปี 1821 และประกอบด้วยลวดแขวนอิสระจุ่มลงในสระปรอท มีการติดตั้งแม่เหล็กถาวรไว้ตรงกลางสระปรอท เมื่อกระแสไหลผ่านลวด ลวดจะหมุนไปรอบๆ แม่เหล็ก แสดงว่ากระแสทำให้เกิดสนามแม่เหล็กแบบวนรอบเส้นลวด เครื่องยนต์นี้มักจะแสดงให้เห็นในชั้นเรียนฟิสิกส์ของโรงเรียนโดยใช้น้ำเกลือแทนปรอทที่เป็นพิษ นี่เป็นรูปแบบที่ง่ายที่สุดในกลุ่มมอเตอร์ไฟฟ้า การปรับปรุงต่อไปคือ Barlow Wheel เป็นอุปกรณ์สาธิตที่ไม่เหมาะสำหรับการใช้งานจริงเนื่องจากมีกำลังจำกัด นักประดิษฐ์พยายามสร้างมอเตอร์ไฟฟ้าสำหรับความต้องการทางอุตสาหกรรม พวกเขาพยายามทำให้แกนเหล็กเคลื่อนที่ในสนามของลูกสูบแม่เหล็กไฟฟ้านั่นคือ วิธีการเคลื่อนที่ของลูกสูบในกระบอกสูบของเครื่องยนต์ไอน้ำ นักวิทยาศาสตร์ชาวรัสเซีย BS จาโคบีไปทางอื่น ในปี ค.ศ. 1834 เขาได้สร้างมอเตอร์ไฟฟ้าที่ใช้งานได้จริงเครื่องแรกของโลกที่มีกระดองหมุน และตีพิมพ์งานเชิงทฤษฎีเรื่อง "การใช้แม่เหล็กไฟฟ้าเพื่อขับเคลื่อนเครื่องจักร" วิทยาศาสตรบัณฑิต Jacobi เขียนว่าเครื่องยนต์ของเขานั้นเรียบง่ายและ "ให้การเคลื่อนที่แบบวงกลมโดยตรง ซึ่งง่ายต่อการแปลงเป็นการเคลื่อนที่ประเภทอื่นมากกว่าแบบลูกสูบ"
การเคลื่อนที่แบบหมุนของกระดองในเครื่องยนต์จาโคบีเกิดจากแรงดึงดูดและแรงผลักแบบสลับกันของแม่เหล็กไฟฟ้า แม่เหล็กไฟฟ้ารูปตัวยูกลุ่มหนึ่งถูกขับเคลื่อนโดยกระแสโดยตรงจากแบตเตอรี่กัลวานิก และทิศทางของกระแสในแม่เหล็กไฟฟ้าเหล่านี้ยังคงไม่เปลี่ยนแปลง กลุ่มแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้เชื่อมต่อกับแบตเตอรี่ผ่านเครื่องสับเปลี่ยนด้วยความช่วยเหลือของทิศทางของกระแสในแม่เหล็กไฟฟ้าแต่ละตัวเปลี่ยนหนึ่งครั้งต่อการปฏิวัติของดิสก์ ในกรณีนี้ ขั้วของแม่เหล็กไฟฟ้าก็เปลี่ยนไปตามไปด้วย และแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้แต่ละตัวก็ถูกดึงดูดและขับไล่สลับกันด้วยแม่เหล็กไฟฟ้าที่อยู่กับที่: เพลามอเตอร์เริ่มหมุน พลังของเครื่องยนต์ดังกล่าวมีเพียง 15 วัตต์ ต่อจากนั้น Jacobi นำพลังของมอเตอร์ไฟฟ้ามาที่ 550 วัตต์ เครื่องยนต์นี้ได้รับการติดตั้งครั้งแรกบนเรือและต่อมาบนรางรถไฟ
เมื่อวันที่ 13 กันยายน พ.ศ. 2381 เรือลำหนึ่งซึ่งมีผู้โดยสาร 12 คนแล่นขึ้นไปบนเนวาต้านกระแสน้ำด้วยความเร็วประมาณ 3 กม./ชม. เรือถูกติดตั้งล้อพาย ล้อถูกขับเคลื่อนด้วยมอเตอร์ไฟฟ้าซึ่งรับกระแสไฟจากแบตเตอรี่เซลล์กัลวานิก 320 เซลล์ เป็นครั้งแรกที่มอเตอร์ไฟฟ้าปรากฏขึ้นบนเรือ





